Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
Podstawy Sztucznej Inteligencji
Jan Kusiak
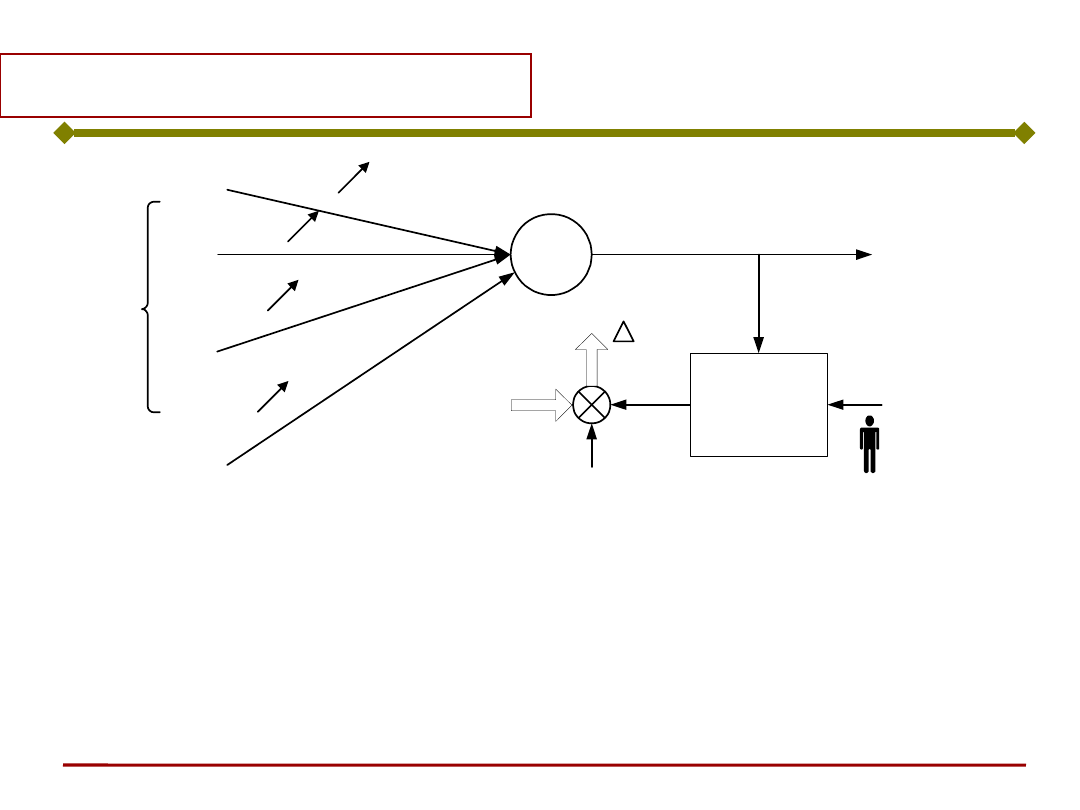
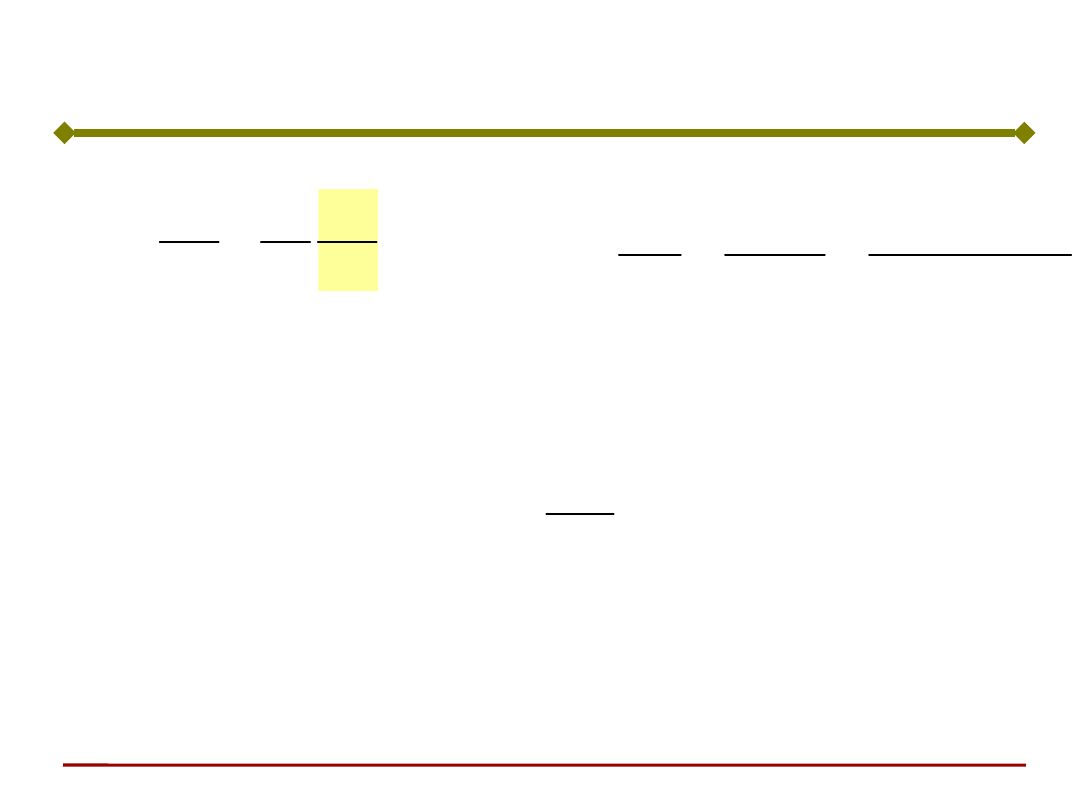
x
1
x
2
w
i1
.
.
.
.
.
.
i-ty neuron
w
ij
w
i2
w
in
x
j
x
n
y
i
generator
sygnału
uczącego
d
i
x
w
i
x
c
r
t
i
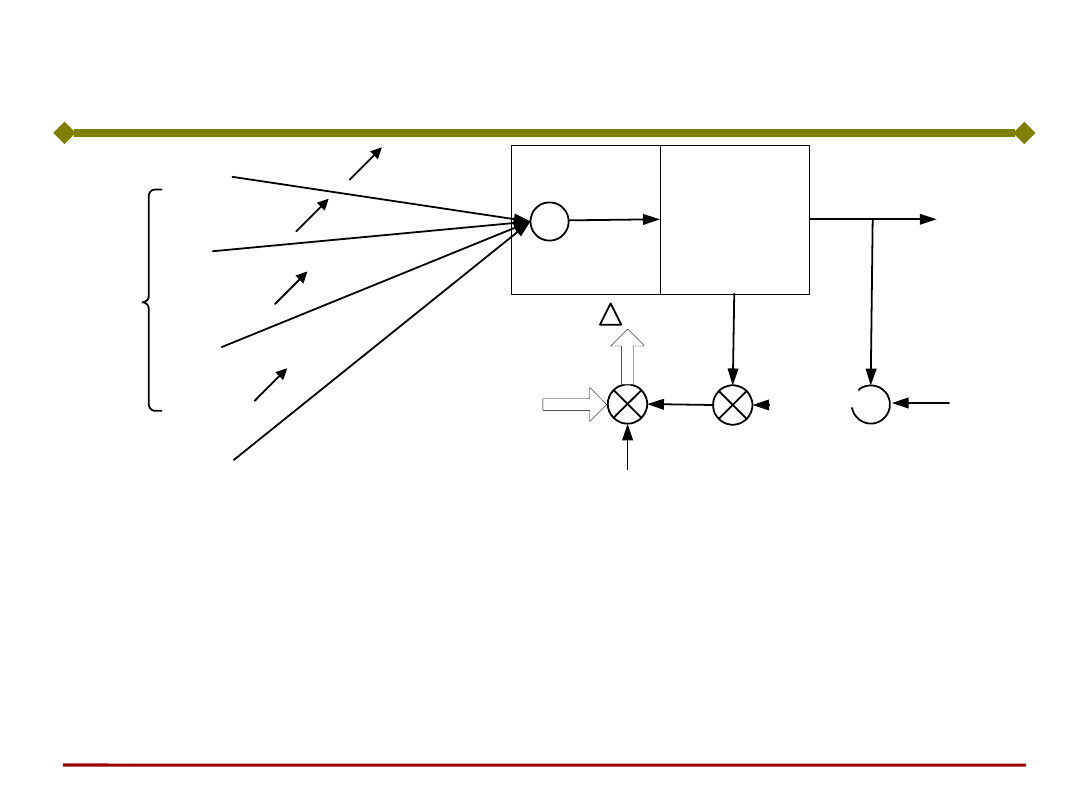
Ogólny wzór korekty współczynników wagowych:
k
k
i
k
k
i
k
i
k
i
k
i
d
w
cr
w
w
w
w
x
x
)
,
,
(
1
Jaką postać ma sygnał uczący r ?
Uczenie neuronu
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
Ogólny przepis (algorytm) uczenia neuronu
wynika z zadania minimalizacji błędu uczenia.
Zadanie to można sformułować następująco:
Dla jakich wartości współczynników wagowych,
błąd uczenia przyjmuje najmniejszą
(minimalną) wartość?
Błąd uczenia pojedynczego neuronu
gdzie:
€
y=ϕ(s) =ϕ
w
i
x
i
i=1
n
∑
⎛
⎝
⎜
⎞
⎠
⎟ =ϕ W
T
X
(
)
€
E =
1
2
(y
i
−t
i
)
2
i=1
n
∑
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
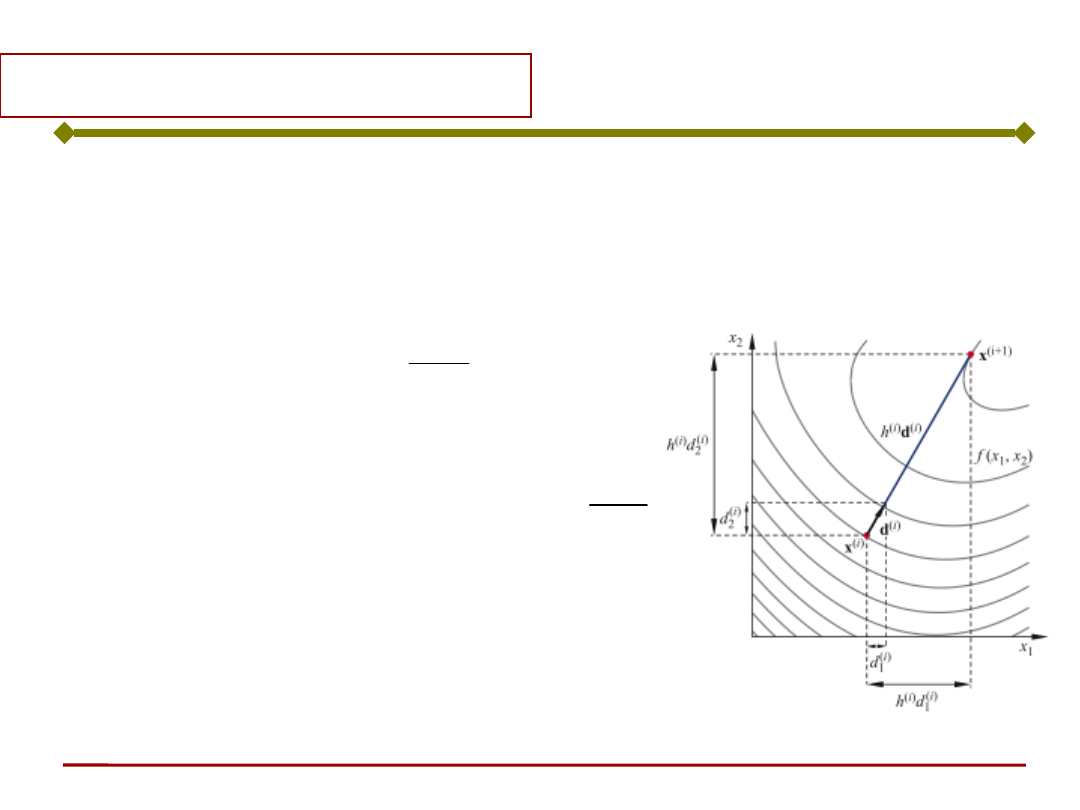
Ogólnie, zagadnienie optymalizacji sprowadza
się do poszukiwania minimum funkcji celu J
(kryterium jakości) drogą kolejnych iteracji
zgodnie z zależnością:
gdzie:
s - krok,
d - kierunek poszukiwań.
sd
x
x
k
k
)
(
)
1
(
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
Ogólnie, do minimalizacji funkcji celu J można
wykorzystać gradientową metodę najszybszego
spadku, wg której zmiana parametrów
optymalizacji następuje zgodnie z zależnością:
czyli
Dx - przyrost zmiennej optymalizacji,
h - długość kroku.
x
J
x
x
x
x
k
k
)
(
)
1
(
x
J
x
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
W naszym przypadku kryterium jakości J=E
l
jest
funkcją współczynników wagowych E
l
= E
l
(W).
Minimalizując funkcję celu metodą gradientową,
poprawka o jaką należy zmodyfikować i-tą
składową wektora wag ma postać:
Poprawka jest proporcjonalna do i-tej
składowej gradientu funkcji E
l
(znak minus
oznacza, że poprawki dokonujemy w kierunku
najszybszego zmniejszania błędu).
i
l
i
w
E
w
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
Korzystając ze wzoru na pochodną funkcji
złożonej zapisać:
€
∂E
∂w
i
=
∂E
∂y
∂y
∂w
i
Zgodnie z wzorem na
wielkość błędu:
€
∂E
∂y
=−(t−y) =−δ
€
E
l
=
1
2
(t
i
−y
i
)
2
i=1
n
∑
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
€
∂E
∂w
i
=
∂E
∂y
∂y
∂w
i
€
∂y
∂w
i
=
∂ϕ(s)
∂w
i
=
∂ϕ( w
i
x
i
∑
)
∂w
i
Tak więc poprawki współczynników wagowych
zależą od przyjętej funkcji aktywacji
)
(s
Ostatecznie, wzór na zmianę współczynników
wagowych przyjmuje postać:
€
w
i
(k+1)
=w
i
(k)
+ηΔw
i
=w
i
(k)
+ηδ
∂ϕ
∂w
i
y
j
=w
i
(k)
+η(t
j
−y
j
)ϕ'y
j
Podstawy Sztucznej Inteligencji
Jan Kusiak
+
x
1
x
2
w
i1
.
.
.
.
.
.
w
ij
w
i2
w
in
x
j
x
n
y
i
d
i
x
w
i
x
Funkcja
aktywacji
+
d
i
- y
i
+
-
c
s
i
r
gdzie j’(w
i
T
x) jest pochodną funkcji
aktywacji.
Sygnał uczący r neuronu o ciągłej funkcji
aktywacji:
€
r =δϕ'(s) =(t
i
−y
i
)ϕ'(w
i
T
x) =[t
i
−ϕ(w
i
T
x)]ϕ'(w
i
T
x)
)
(
'
i
s
)
(
i
s
t
i
t
i
- y
i
Uczenie neuronu – reguła
delta
Podstawy Sztucznej Inteligencji
Jan Kusiak
Ostatecznie, korekta współczynników wagowych
jest następująca:
• Dla
sigmoidalnej (logistycznej)
funkcji
aktywacji
:
• Dla
neuronów liniowych:
€
Δw
i
=ηδx =c(t−y)x
• Dla funkcji aktywacji
tanh:
Uczenie neuronu
€
Δw
i
=ηδy(1−y)x =η(t−y)y(1−y)x
€
Δw
i
=ηδ(1−y
2
)x =η(t−y)(1−y
2
)x
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczna sieć neuronowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
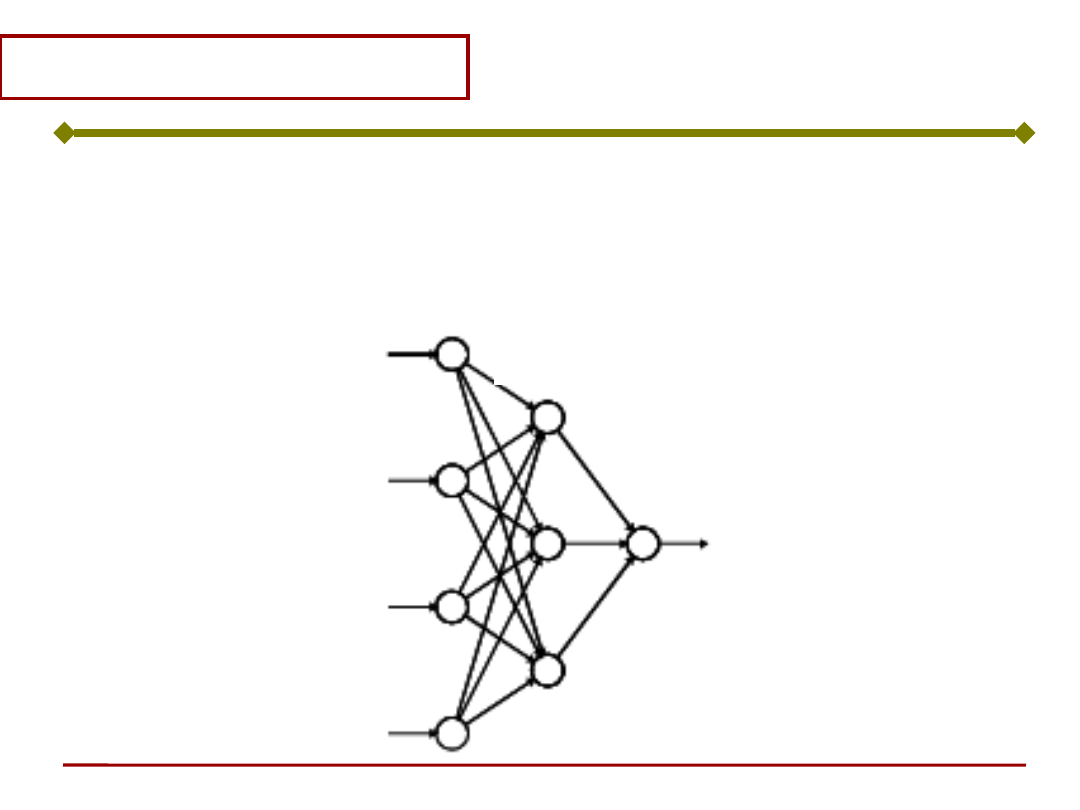
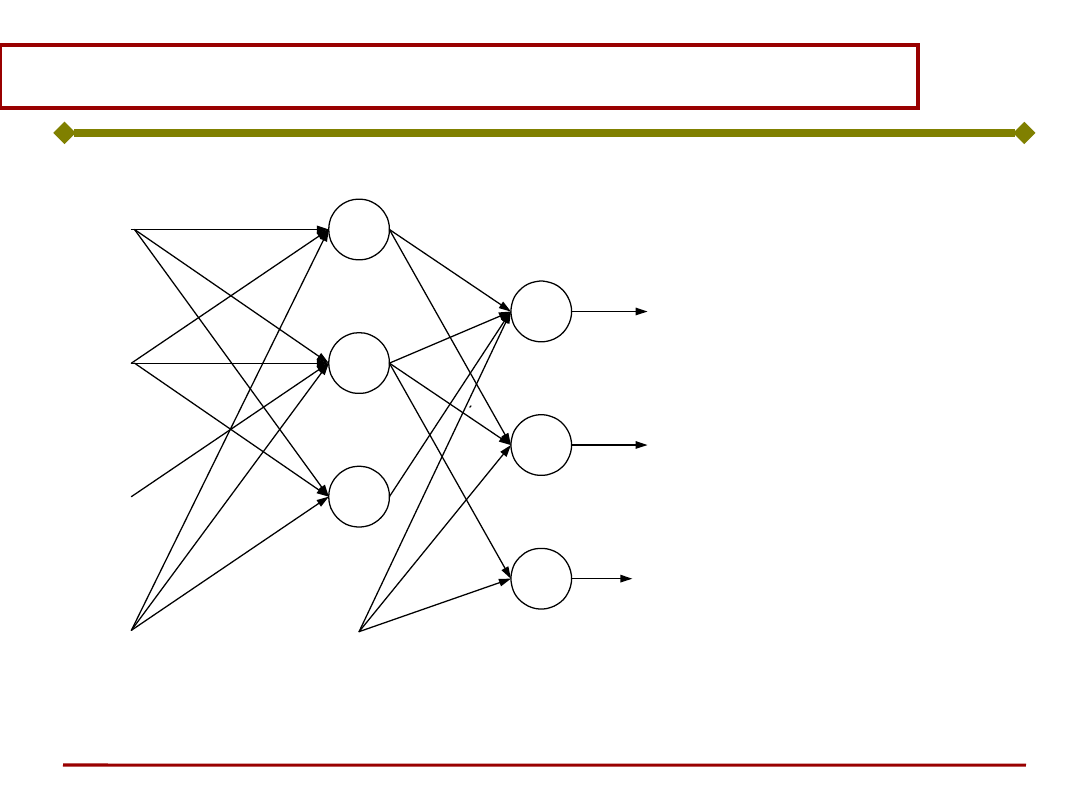
Sieć neuronowa
Sieć neuronowa jest układem neuronów
odpowiednio ze sobą połączonych w warstwy,
przy czym wyróżnia się zazwyczaj warstwę
wejściową, warstwy ukryte i warstwę wyjściową:
warstwa
wyjściowa
warstwa
ukryta
warstwa wejściowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczne Sieci Neuronowe 1
Sieć neuronowa
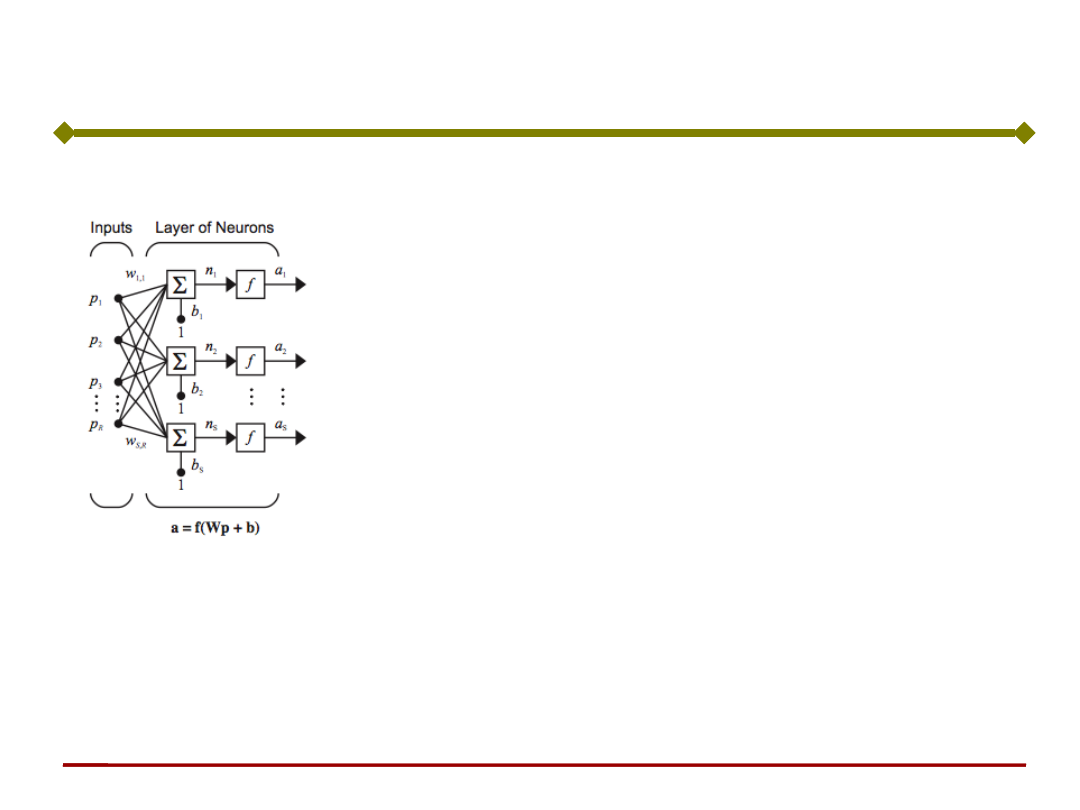
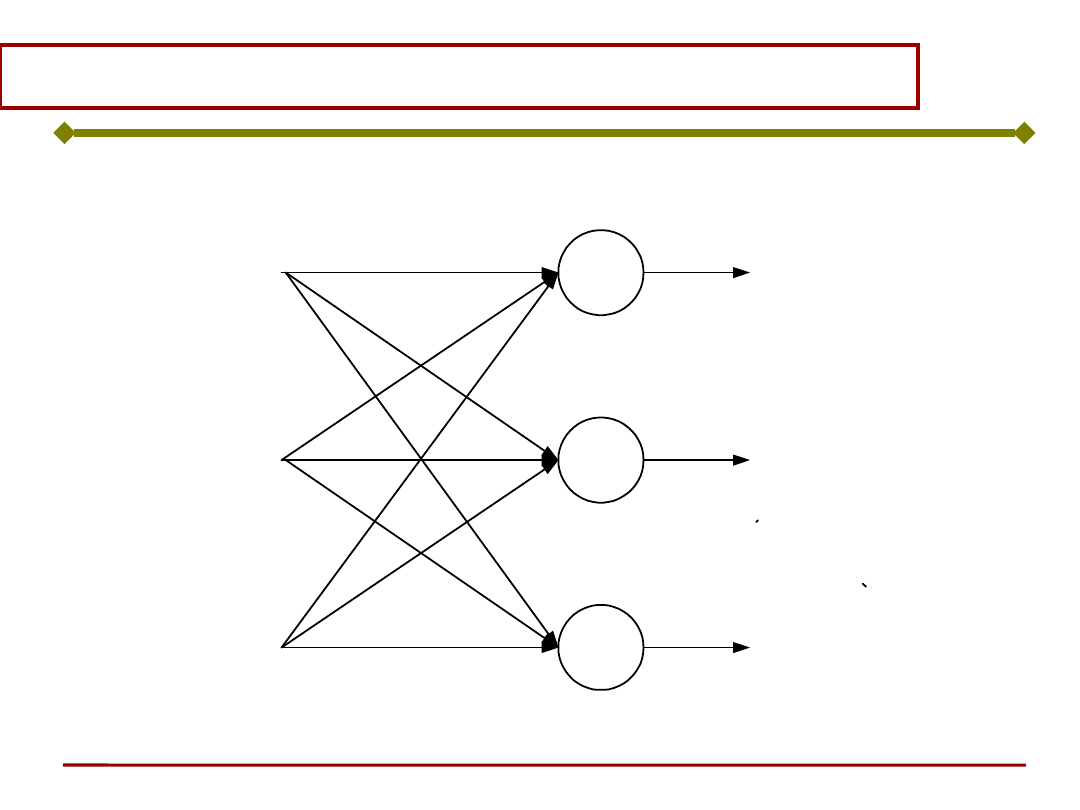
Pojedyncza warstwa (wejściowa) sieci
R – liczba elementów wektora wejściowego p
S – liczba neuronów w warstwie
Uwaga: R nie musi być równe S
• Każdy sygnał wejściowy (każdy element wektora
p) jest podawany na wejście każdego z
neuronów poprzez macierz wag W.
• Sygnałem wyjściowym jest wektor kolumnowy a.
• Macierz wag W
R
S
S
S
R
R
w
w
w
w
w
w
w
w
w
,
2
,
1
,
,
2
2
,
2
1
,
2
,
1
2
,
1
1
,
1
...
...
...
W
Uwaga: numer wiersza (pierwszy wskaźnik) to numer neuronu
docelowego, a numer kolumny (drugi wskaźnik) to numer źródła
€
n
1
=w
1,1
p
1
+w
1,2
p
2
+...+w
1,R
p
R
+b
b
Wp
n
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczne Sieci Neuronowe 1
Sieć neuronowa
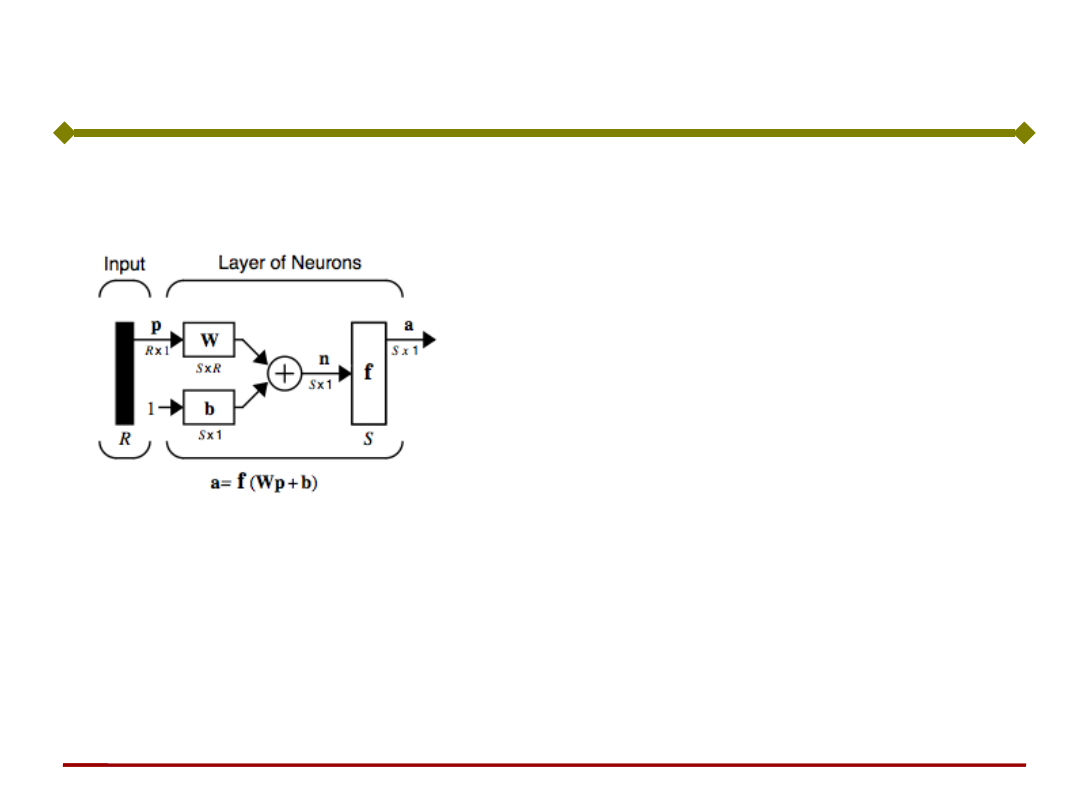
Pojedyncza warstwa (wejściowa) sieci w skróconej notacji
R – liczba elementów wektora
wejściowego p
S – liczba neuronów w warstwie
1
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczne Sieci Neuronowe 1
Sieć neuronowa
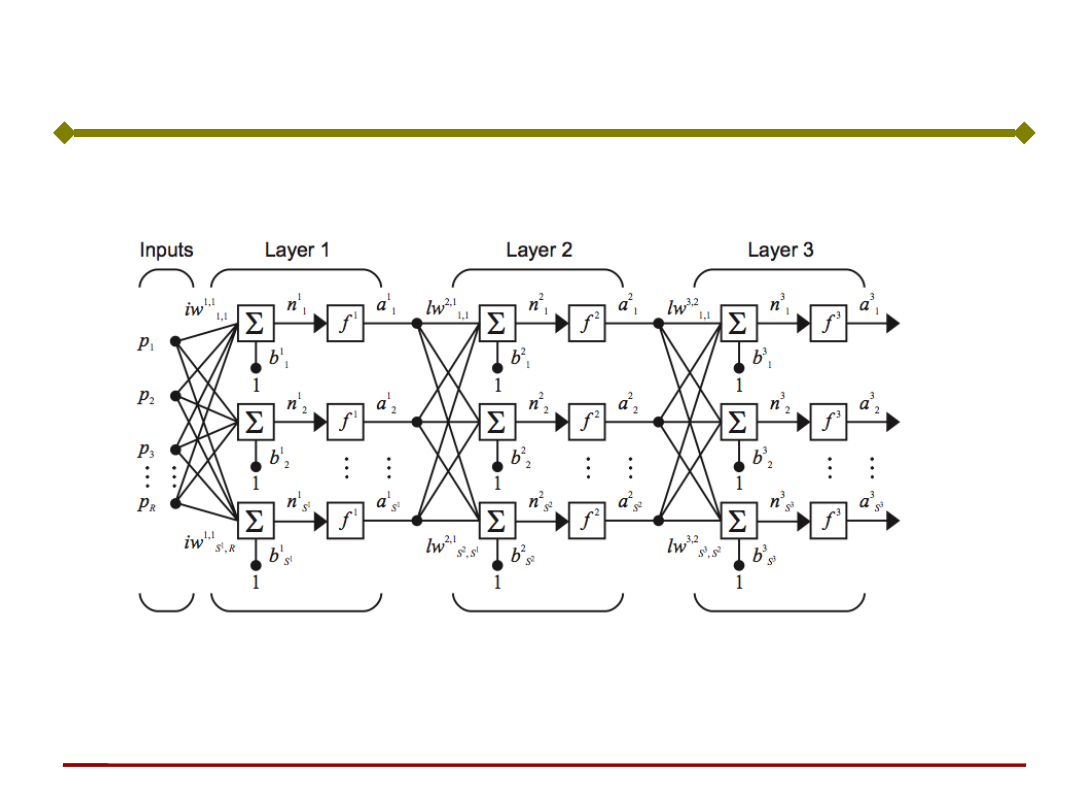
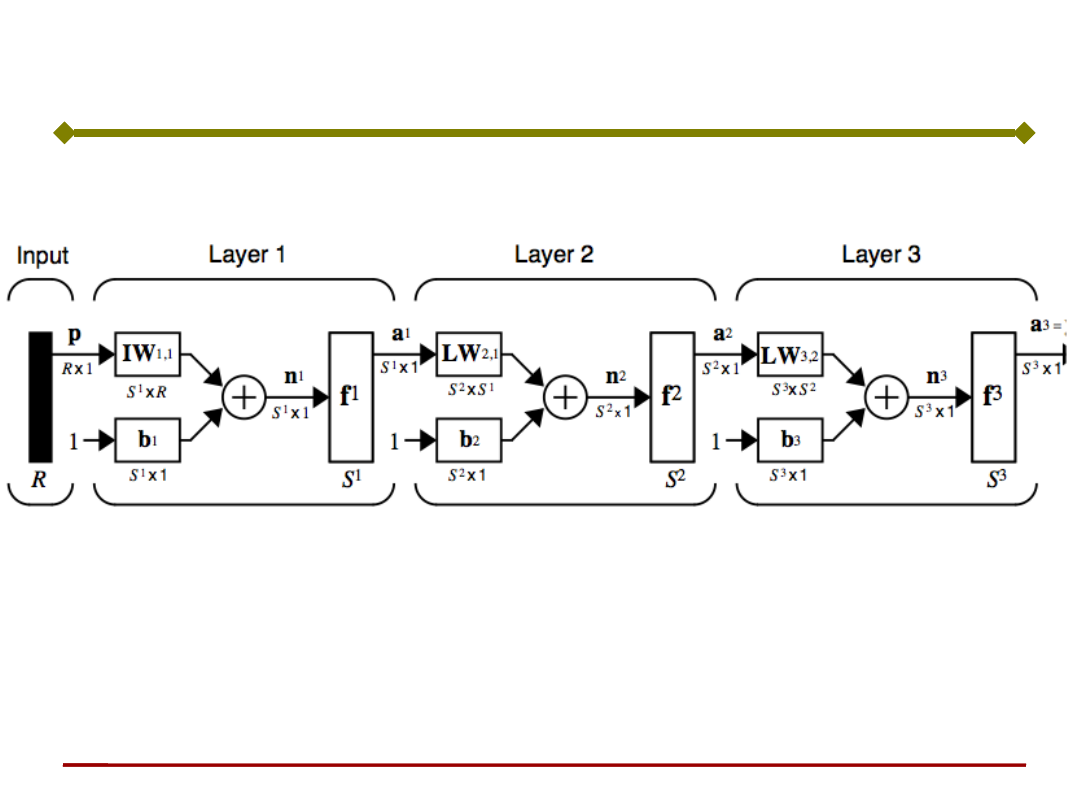
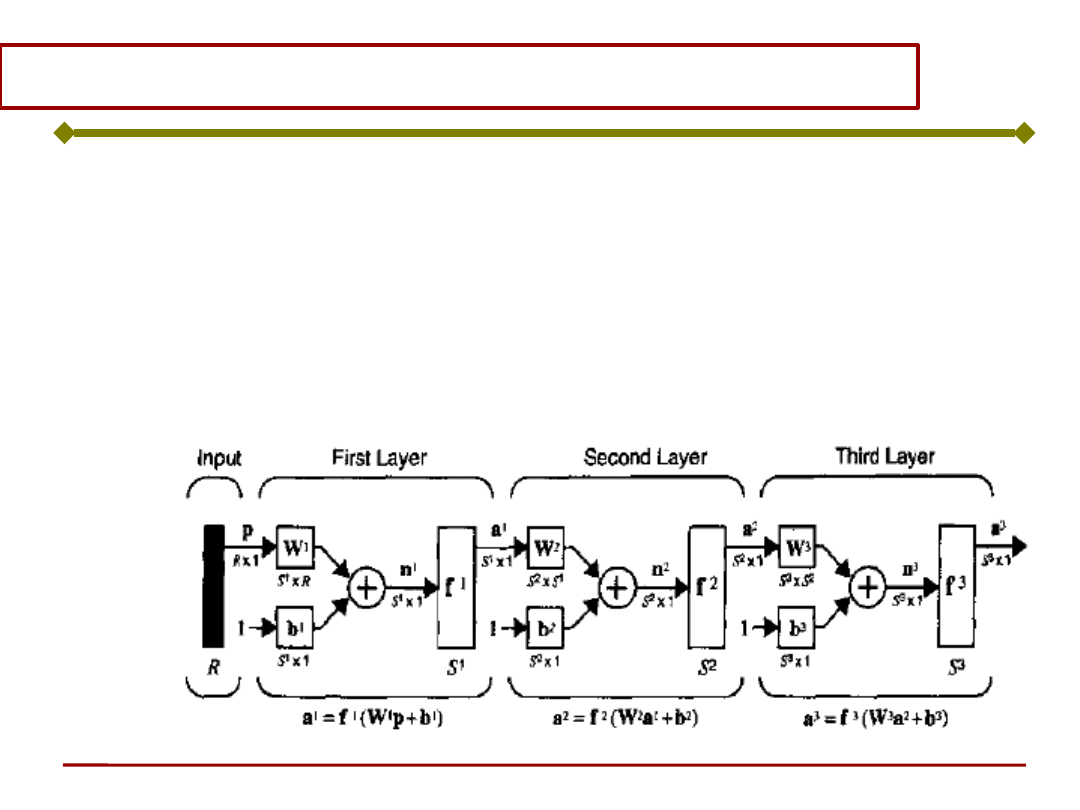
Ogólna struktura sieci neuronowej wielowarstwowej
a
2
f
2
(LW
2,1
a
1
b
2
)
a
3
f
3
(LW
3,2
a
2
b
3
)
a
1
f
1
(IW
1,1
p b
1
)
a
3
f
3
(LW
3,2
f
2
(LW
2,1
f
1
(IW
1,1
p b
1
) b
2
) b
3
)
LW
- Macierz wag warstwy
wewnętrznej (ukrytej)
- Macierz wag warstwy
wejściowej
IW
Sieć neuronowa
Ogólna struktura sieci neuronowej wielowarstwowej
€
a1=f1(Wx)
€
a3 =f3(V2f2(V1f1(Wx)))
Warstwa
wejściowa
x
a
1
W
V
2
a
2
V
1
...
a
3
€
a2 =f2(V1a1)
€
a3=f3(V2a2)
Warstwa
ukryta 1
Warstwa
ukryta 2
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczne Sieci Neuronowe 1
Sieć neuronowa
Sieć neuronowa wielowarstwowa w skróconej notacji
a
2
f
2
(LW
2,1
a
1
b
2
)
a
3
f
3
(LW
3,2
a
2
b
3
)
a
1
f
1
(IW
1,1
p b
1
)
a
3
f
3
(LW
3,2
f
2
(LW
2,1
f
1
(IW
1,1
p b
1
) b
2
) b
3
)
LW
- Macierz wag warstwy
wewnętrznej (ukrytej)
- Macierz wag warstwy
wejściowej
IW
Pierwszy indeks – warstwa docelowa
Drugi indeks – warstwa źródłowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
Sygnał wyjściowy każdego z neuronów jest w
ogólnym przypadku nieliniową funkcją
pobudzenia
gdzie: w
i
= [w
i1
, w
i2
, ...,w
im
]
T
, - wektor wag
sygnałów wejściowych i-tego neuronu.
Sieć neuronowa
€
y
i
=ϕ(n
i
)=ϕ
w
ij
x
j
j=1
m
∑
⎛
⎝
⎜
⎜
⎜
⎞
⎠
⎟
⎟
⎟
=ϕ(w
i
Tx), i=1,2,K ,n
Podstawy Sztucznej Inteligencji
Jan Kusiak
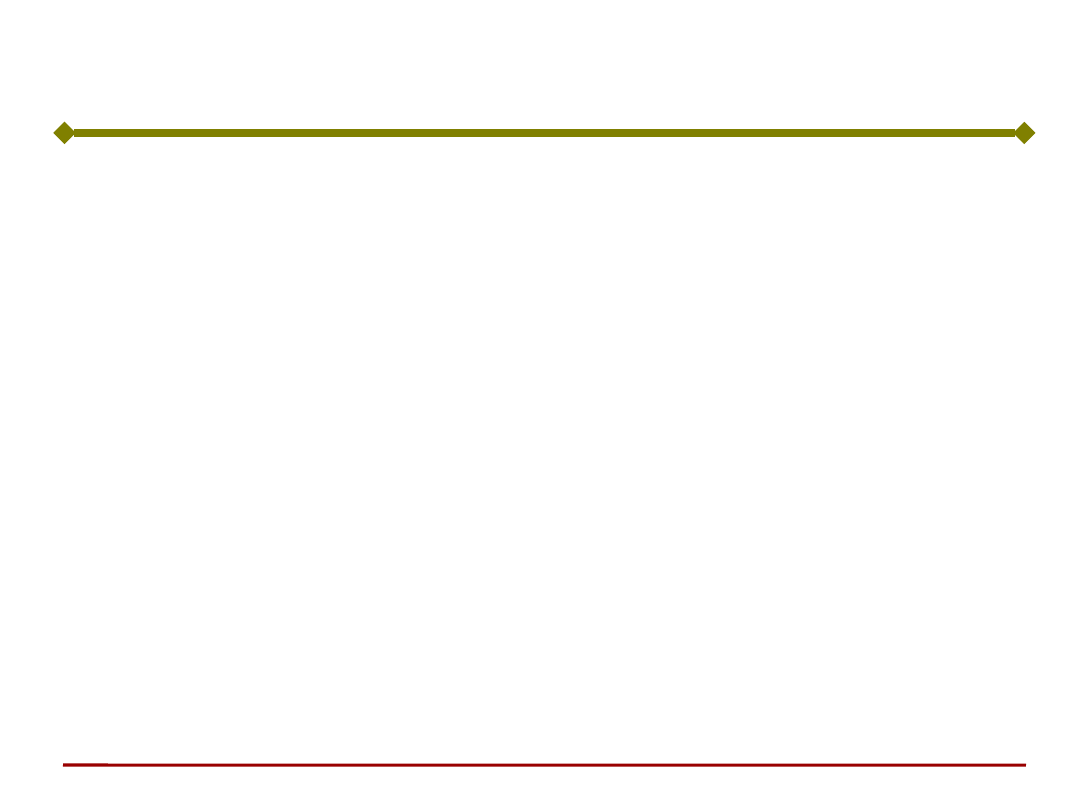
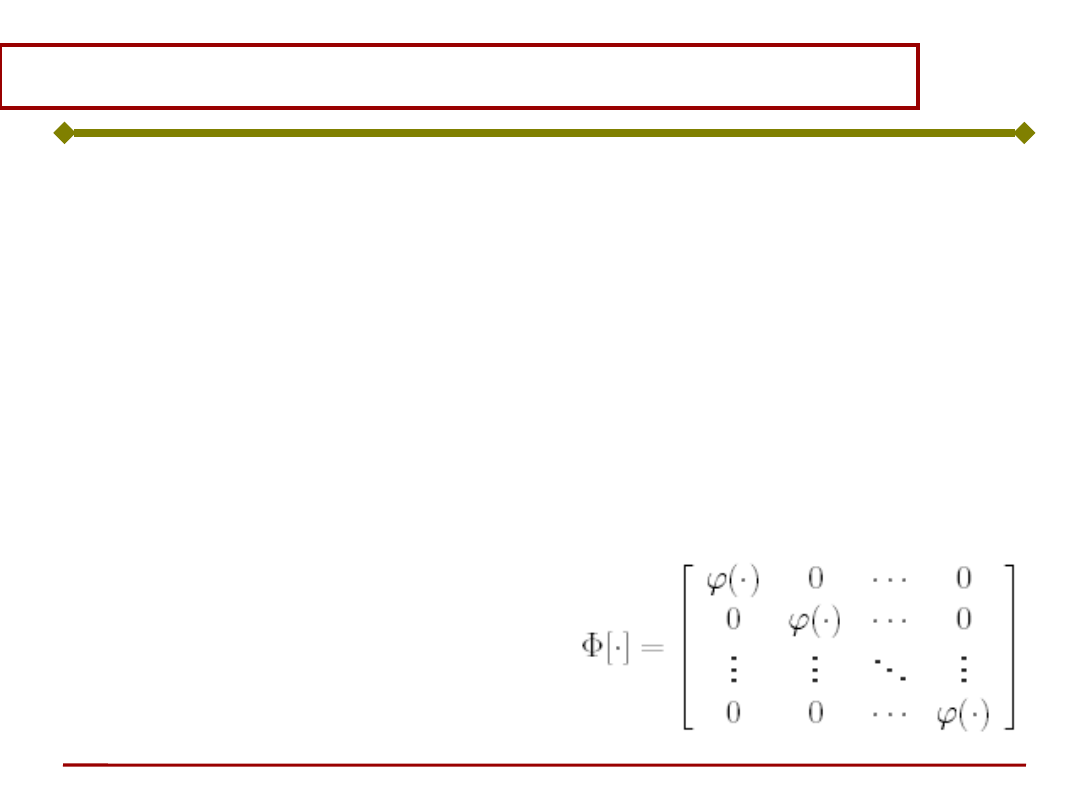
Relację wejście - wyjście można zapisać w
postaci macierzowej:
gdzie: D jest macierzowym operatorem
nieliniowym reprezentującym funkcje
aktywacji poszczególnych neuronów:
Sieć neuronowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
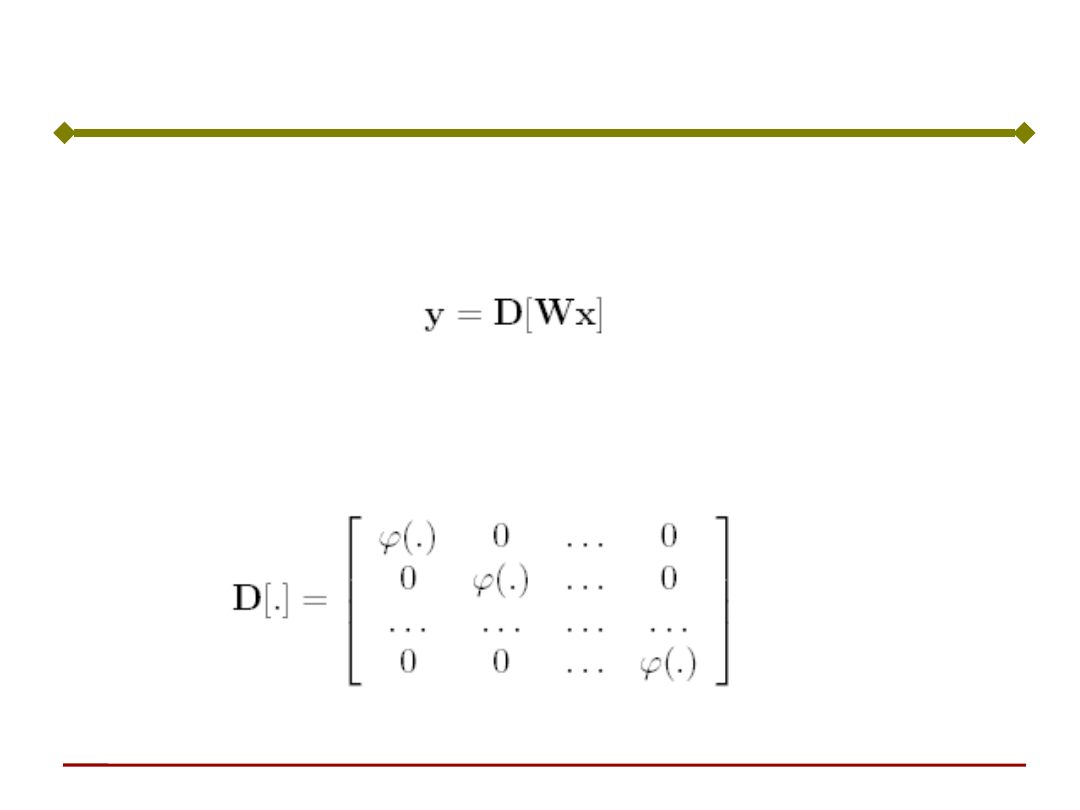
W jest macierzą wag synaptycznych,
reprezentującą tablicę połączeń poszczególnych
neuronów analizowanej warstwy z warstwą
poprzednią:
gdzie:
n - liczba warstw,
m - liczba neuronów w danej warstwie
Sieć neuronowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
Wektor sygnałów wyjściowych z dowolnej
warstwy można wyznaczyć mnożąc wektor
sygnałów wejściowych przez macierz
współczynników wagowych
W przypadku wektorów nieliniowych, składowe
otrzymanego wektora należy przekształcić
poprzez funkcję aktywacji.
Sieć neuronowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
Sygnały wejściowe przyjmują wartości z
pewnego określonego przedziału, zazwyczaj
przyjmuje się:
x Î [-1,1]
lub
x Î [0,1]
Można to osiągnąć poprzez normalizację
sygnałów wejściowych
Sieć neuronowa
Podstawy Sztucznej Inteligencji
Jan Kusiak
Budowa sieci
• Neurony tworzą warstwy
• Sygnały wyjściowe neuronów jednej warstwy
stanowią sygnały wejściowe neuronów
warstwy następnej
• Liczba wejść każdego neuronu jest
zwiększoną o 1 liczbą neuronów w warstwie
poprzedniej (sygnał progowy o stałej
wartości).
• Liczba wejść w neuronach pierwszej warstwy
jest uzależniona od liczby sygnałów
wejściowych do sieci.
• Liczba warstw (a także liczba neuronów) w
znaczący sposób decyduje o możliwościach
sieci
Podstawy Sztucznej Inteligencji
Jan Kusiak
Co ma wpływ na sygnały wyjściowe?
Sygnał wyjściowy neuronu
zależy od:
sygnałów wejściowych,
współczynników wagowych,
funkcji aktywacji,
budowy sieci
Podstawy Sztucznej Inteligencji
Jan Kusiak
Techniki uczenia
sieci neuronowych
Podstawy Sztucznej Inteligencji
Jan Kusiak
Zmieniając wartości współczynników
wagowych możemy zmieniać zależności
pomiędzy wektorami sygnałów
wejściowych i wyjściowych sieci.
Jak ustawić te współczynniki aby
uzyskać żądane zależności pomiędzy
tymi wektorami?
Sieci neuronowych się nie programuje.
Oznacza to, że wartości współczynników
wag nie ustala się bezpośrednio,
ulegają one zmianom podczas procesu
nazywanego uczeniem sieci.
Podstawy Sztucznej Inteligencji
Jan Kusiak
Dla n neuronów warstwy wyjściowej sieci, błąd
jednej epoki wynosi:
Całkowity błąd uczenia złożonego z m epok
wynosi:
€
E
e
=
1
n
(y
i
−t
i
)
2
i=1
n
∑
m
j
ej
E
m
E
1
1
Błąd uczenia sieci
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie sieci jednowarstwowej
1
K
k
z
1
z
k
z
K
y
1
y
j
y
J
w
11
w
k1
w
K1
w
1j
w
1J
w
k1
w
kj
w
Kj
w
kJ
w
KJ
.
.
.
.
.
.
.
.
.
.
.
.
Podstawy Sztucznej Inteligencji
Jan Kusiak
Wektor sygnałów wyjściowych sieci wynosi:
gdzie
:
a F jest operatorem
nieliniowym
zależnym od funkcji
aktywacji
poszczególnych
neuronów:
J
y
y
y
y
2
1
J
z
z
z
z
2
1
KJ
K
K
kJ
k
k
J
w
w
w
w
w
w
w
w
w
W
2
1
2
1
1
12
11
Uczenie sieci jednowarstwowej
z = F[Wy]
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie sieci jednowarstwowej
Ogólny wzór korekty współczynników wagowych:
k
k
i
k
k
i
k
i
k
i
k
i
d
w
cr
w
w
w
w
x
x
)
,
,
(
1
Jaką postać ma sygnał uczący r ?
Podstawy Sztucznej Inteligencji
Jan Kusiak
min
)
(
2
1
1
2
K
k
lk
lk
l
z
d
E
Celem procesu uczenia jest minimalizacja
błędu E
l
prezentacji pojedynczego obrazu
wejściowego y
l
, l=1,...,p
Uczenie sieci jednowarstwowej
min
l
E
Podstawy Sztucznej Inteligencji
Jan Kusiak
Ogólnie, zagadnienie optymalizacji sprowadza
się do poszukiwania minimum funkcji celu
(kryterium jakości) drogą kolejnych iteracji
zgodnie z zależnością:
gdzie:
s - krok,
d - kierunek poszukiwań.
Uczenie sieci jednowarstwowej
sd
x
x
k
k
)
(
)
1
(
Podstawy Sztucznej Inteligencji
Jan Kusiak
Ogólnie, do minimalizacji funkcji celu można
wykorzystać gradientową metodę najszybszego
spadku, wg której zmiana parametrów
optymalizacji następuje zgodnie z zależnością:
czyli
Dx - przyrost zmiennej optymalizacji,
h - długość kroku.
x
J
x
x
x
x
k
k
)
(
)
1
(
x
J
x
Uczenie sieci jednowarstwowej
Podstawy Sztucznej Inteligencji
Jan Kusiak
W naszym przypadku kryterium jakości J=E
l
jest
funkcją współczynników wagowych E
l
= E
l
(W).
Minimalizując funkcję celu metodą gradientową,
poprawka o jaką należy zmodyfikować i-tą
składową wektora wag ma postać:
Poprawka jest proporcjonalna do i-tej
składowej gradientu funkcji E
l
(znak minus
oznacza, że poprawki dokonujemy w kierunku
najszybszego zmniejszania błędu).
Uczenie sieci jednowarstwowej
i
l
i
w
E
w
Podstawy Sztucznej Inteligencji
Jan Kusiak
Korzystając ze wzoru
na pochodną funkcji
złożonej zapisać:
i
i
w
z
z
E
w
E
Uczenie sieci jednowarstwowej
1
K
k
z
1
z
k
z
K
y
1
y
j
y
J
w
11
w
k1
w
K1
w
1j
w
1J
w
k1
w
kj
w
Kj
w
kJ
w
KJ
.
.
.
.
.
.
.
.
.
.
.
.
Podstawy Sztucznej Inteligencji
Jan Kusiak
Korzystając ze wzoru
na pochodną funkcji
złożonej zapisać:
i
i
w
z
z
E
w
E
Uczenie sieci jednowarstwowej
1
K
k
z
1
z
k
z
K
y
1
y
j
y
J
w
11
w
k1
w
K1
w
1j
w
1J
w
k1
w
kj
w
Kj
w
kJ
w
KJ
.
.
.
.
.
.
.
.
.
.
.
.
)
(
z
d
z
E
Zgodnie z wzorem na
wielkość błędu:
K
k
lk
lk
l
z
d
E
1
2
)
(
2
1
Podstawy Sztucznej Inteligencji
Jan Kusiak
i
i
w
z
z
E
w
E
Uczenie sieci jednowarstwowej
Tak więc poprawki współczynników wagowych
zależą od budowy sieci, a konkretnie, od
przyjętej funkcji aktywacji
i
i
i
i
i
w
y
w
w
s
w
z
)
(
)
(
)
(s
Ostatecznie, wzór na zmianę współczynników
wagowych przyjmuje postać:
j
k
k
k
kj
j
j
k
kj
kj
k
kj
k
kj
y
z
d
w
y
w
w
w
w
w
'
)
(
)
(
)
(
)
(
)
1
(
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie sieci jednowarstwowej
Ostatecznie, korekta współczynników wagowych
jest następująca:
• Dla
sigmoidalnej (logistycznej)
funkcji
aktywacji
:
• Dla
neuronów liniowych:
j
k
k
kj
y
w
)
(
j
k
k
k
k
kj
y
z
z
z
d
w
)
1
(
)
(
• Dla funkcji aktywacji
tanh:
j
k
k
k
kj
y
z
z
d
w
)
1
)(
(
2
J
j
,
,
1
K
k
,
,
1
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm uczenia ciągłej
jednowarstwowej sieci
Dane jest p par uczących:
{(y
1
,d
1
),(y
2
,d
2
),...,(y
p
,d
p
)}
gdzie y
i
ma rozmiar J ×1, d
i
ma rozmiar K ×1, a
sygnał progowy przyjmuje wartość y
iJ
= -1, i =
1, 2,..., p. Niech parametr l oznacza numer
kroku cyklu uczenia.
Krok 1: Wybór h > 0, E
max
> 0.
Krok 2: Wybór początkowych wartości elementów
macierzy wag W jako niewielkich liczb
losowych. Macierz W ma wymiar K ×J.
Krok 3: Ustawienie wartości początkowej
licznika kroków oraz wyzerowanie
wartości błędu: l = 1, E = 0.
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm uczenia ciągłej
jednowarstwowej sieci
Krok 4: Podanie obrazu na wejście i obliczenie
sygnału wyjściowego: y = y
l
, d=d
l
, z
k
=
j(w
k
T
y), k=1,2, ..., K gdzie w
k
T
jest k-
tym wierszem macierzy W.
Krok 5: Dla bipolarnej (tanh) funkcji
aktywacji uaktualnienie wag wg
zależności:
y
z
z
d
w
w
k
k
k
k
k
)
1
)(
(
2
1
2
K
k
,
,
2
,
1
K
k
,
,
2
,
1
y
z
z
z
d
w
w
k
k
k
k
k
k
)
1
(
)
(
2
1
Podstawy Sztucznej Inteligencji
Jan Kusiak
Krok 6: Obliczenie błędu łącznego:
Krok 7: Jeżeli l < p, to l=l+1 i przejście do
kroku 4.
Krok 8: Cykl uczenia został zakończony. Jeżeli
E < E
max
, to zakończenie uczenia. W
przeciwnym razie rozpoczęcie nowego
cyklu uczenia począwszy od kroku 3.
2
1
)
(
2
1
K
k
k
k
z
d
E
E
Algorytm uczenia ciągłej
jednowarstwowej sieci
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie sieci wielowarstwowej
1
J -1
j
x
1
x
i
x
I-1
z
1
z
k
z
K
v
11
v
j1
v
1i
v
1i
v
1I
v
j1
v
ji
v
jI
v
J -1,I
.
.
.
.
.
.
.
.
.
.
.
.
x
J
= -1
w
11
v
11
1
K
k
.
.
.
.
.
.
y
J
= -1
w
k1
w
1j
w
kj
w
Kj
w
kJ
w
KJ
w
1J
warstwa wyjściowa
warstwa ukryta
Czy można
stosować tę
samą regułę
uczenia co dla
sieci
jednowarstwowe
j?
Podstawy Sztucznej Inteligencji
Jan Kusiak
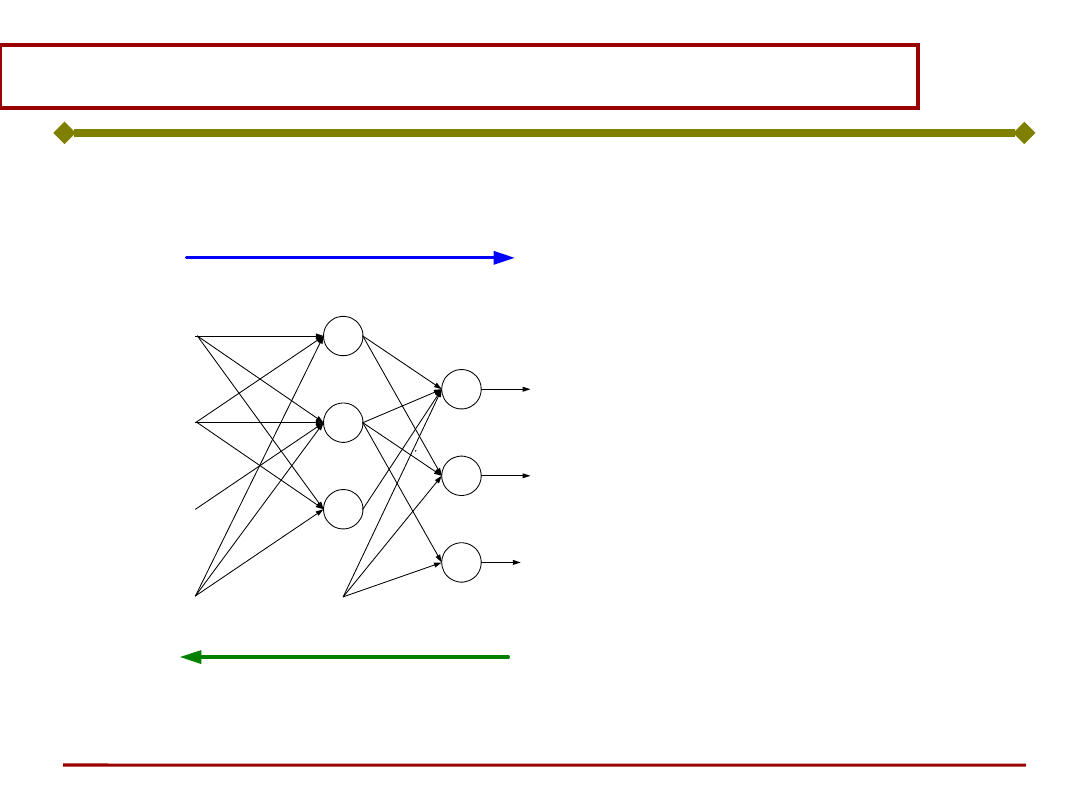
Algorytm wstecznej propagacji
błędu
Przez wiele lat nie znano metody skutecznego
uczenia sieci wielowarstwowych.
1986 - D. Rumelhart, G. Hinton i R. Williams
- Algorytm wstecznej propagacji błędu dla
jednokierunkowych sieci warstwowych. Algorytm
ten stanowi uogólnienie reguły Delta.
Mając wyznaczony błąd d
m
występujący podczas
realizacji procesu uczenia w neuronie o
numerze m, możemy "rzutować" ten błąd wstecz
do wszystkich tych neuronów, których sygnały
stanowiły wejścia dla m-tego neuronu.
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm wstecznej propagacji
błędu
k
k
w
1
J -1
j
x
1
x
i
x
I-1
z
1
z
k
z
K
v
11
v
j1
v
1i
v
1i
v
1I
v
j1
v
ji
v
jI
v
J -1,I
.
.
.
.
.
.
.
.
.
.
.
.
x
J
= -1
w
11
v
11
1
K
k
.
.
.
.
.
.
y
J
= -1
w
k1
w
1j
w
kj
w
Kj
w
kJ
w
KJ
w
1J
warstwa wyjściowa
warstwa ukryta
WE
(x)
WY
(z)
WE
(
k
)
WY
(
j
)
i
i
x
w
z
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm wstecznej propagacji
błędu
Algorytm:
gdzie: M – liczba warstw
M
m
m
m
m
m
M
m
a
a
b
a
W
f
a
p
a
,
1
,
,
1
,
0
dla
)
(
1
1
1
1
0
1. Podanie sygnału wejściowego p i uzyskanie
na wyjściu sygnału a (kierunek sygnału od WE
do WY)
2. Rzutowanie wstecz błędu = (t – a)
(kierunek sygnału od WY do WE)
1
2
1
dla
)
)(
(
)
)(
(
2
1
1
,
,
,
M-
m
m
T
m
m
m
m
M
M
M
s
W
n
F
s
a
t
n
F
s
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm wstecznej propagacji
błędu
)
(
0
0
0
)
(
0
0
0
)
(
)
(
2
1
m
s
m
m
m
m
m
m
m
m
n
f
n
f
n
f
n
F
Podstawy Sztucznej Inteligencji
Jan Kusiak
Algorytm wstecznej propagacji
błędu
m
m
m
T
m
m
m
m
k
k
k
k
s
b
b
a
s
W
W
)
(
)
1
(
)
(
)
(
)
1
(
1
Korekta wag:

Problemy uczenia sieci neuronowej
Problemy uczenia
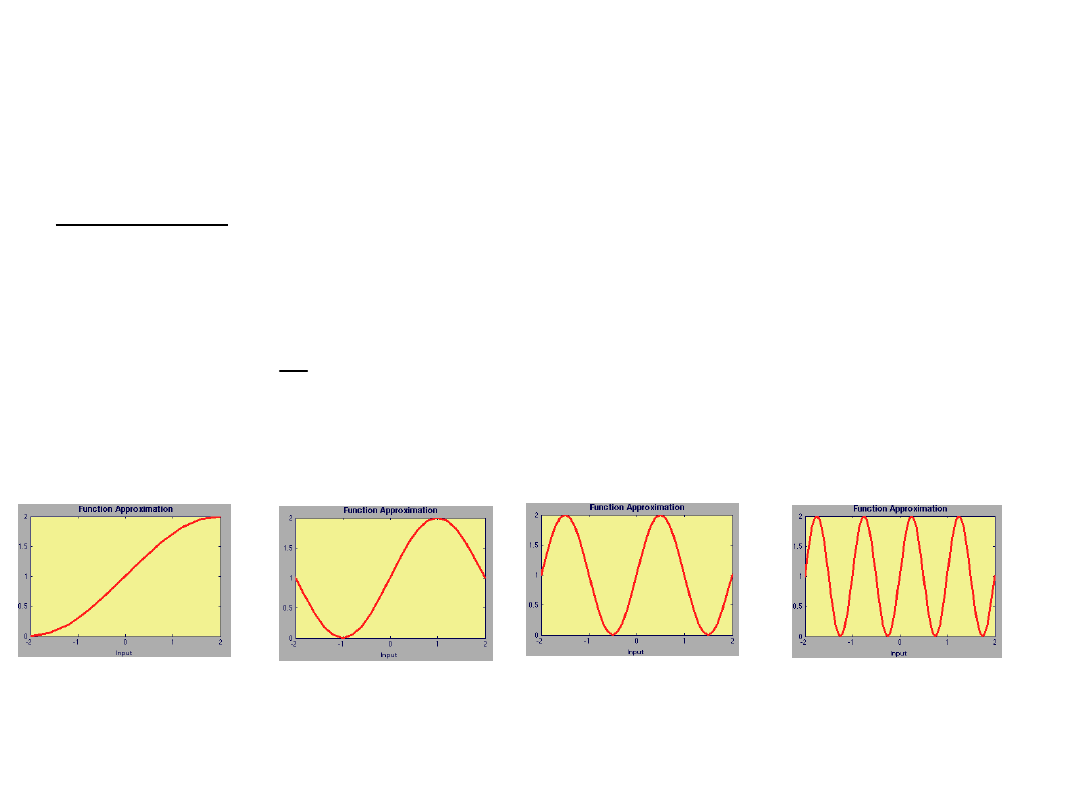
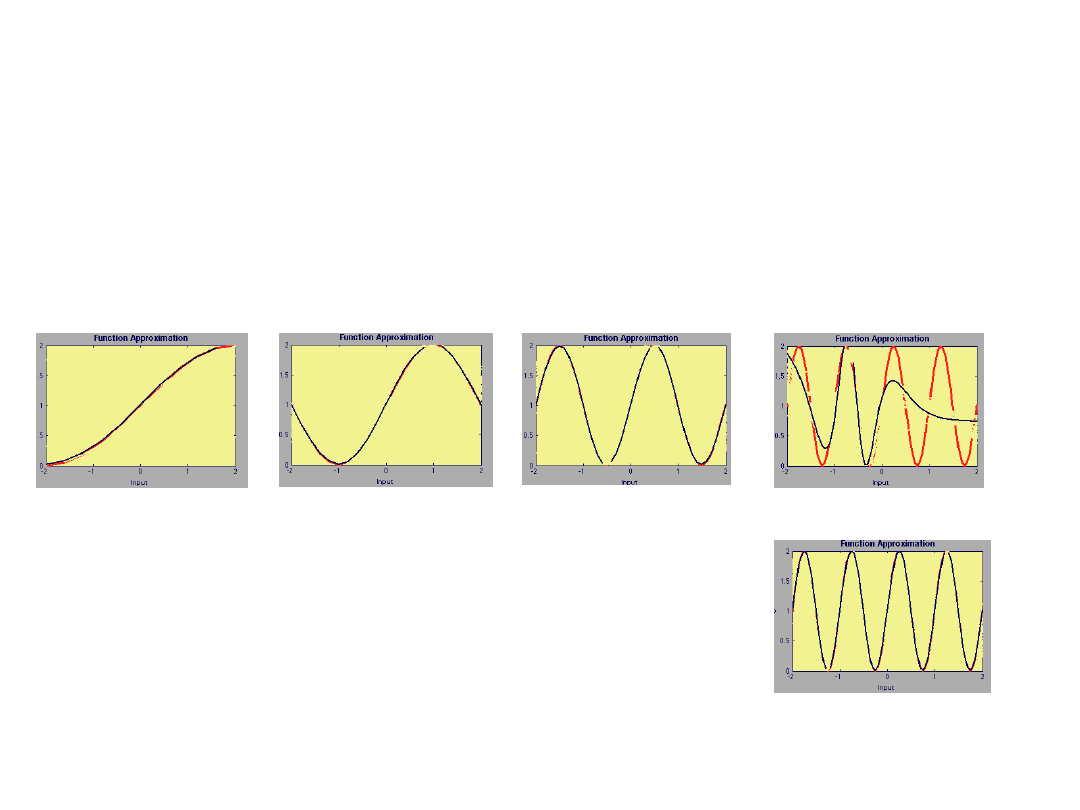
Zadanie:
Chcemy aproksymować funkcję:
nnd11fa
g(p) 1 sin(i
4
p) dla 2p2, i 1,2,4,8
i=1
i=2
i=4
i=8
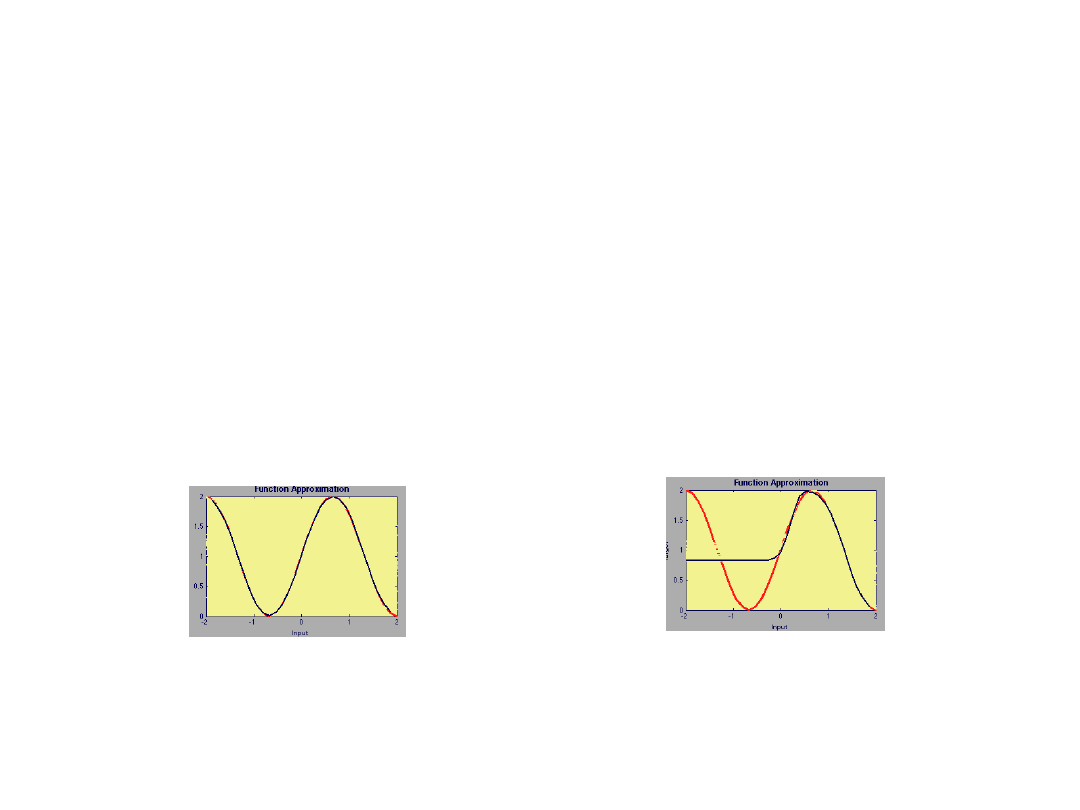
Problemy uczenia – dobór architektury
Właściwy dobór architektury
(rozmiaru) sieci
nnd11fa
i=1
i=2
i=4
i=8
Sieć 1 – 3 – 1;
logsig - linear
Sieć 1 –
6
– 1
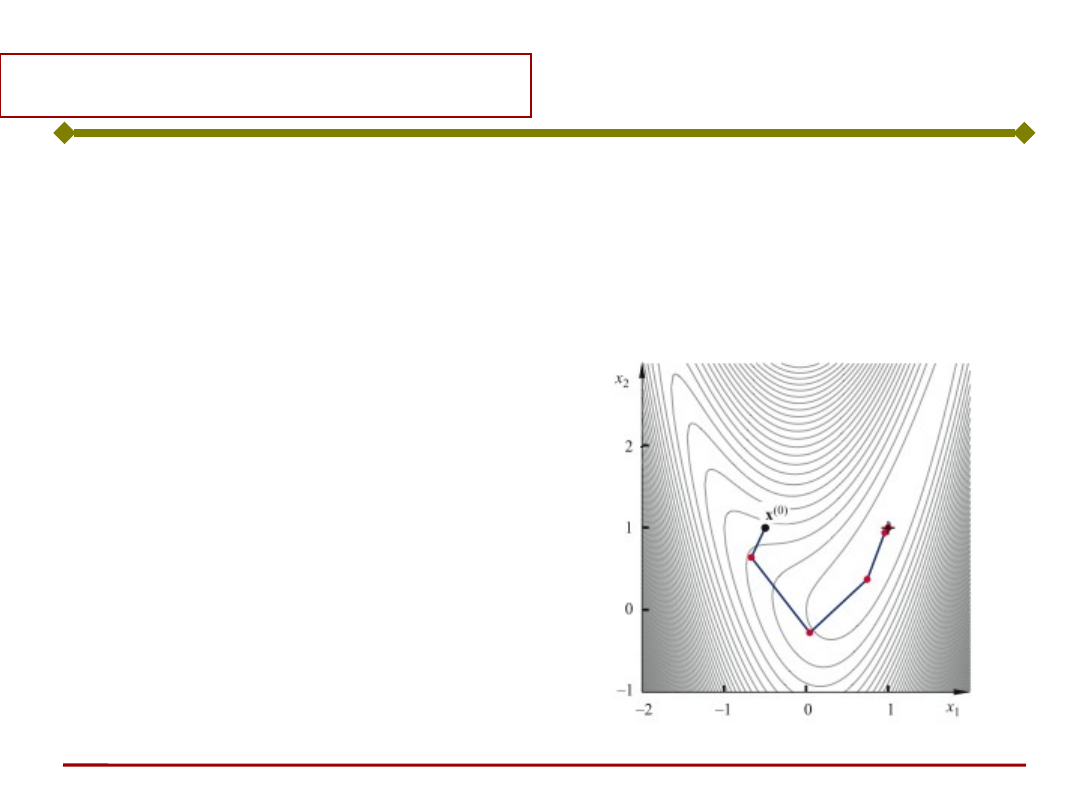
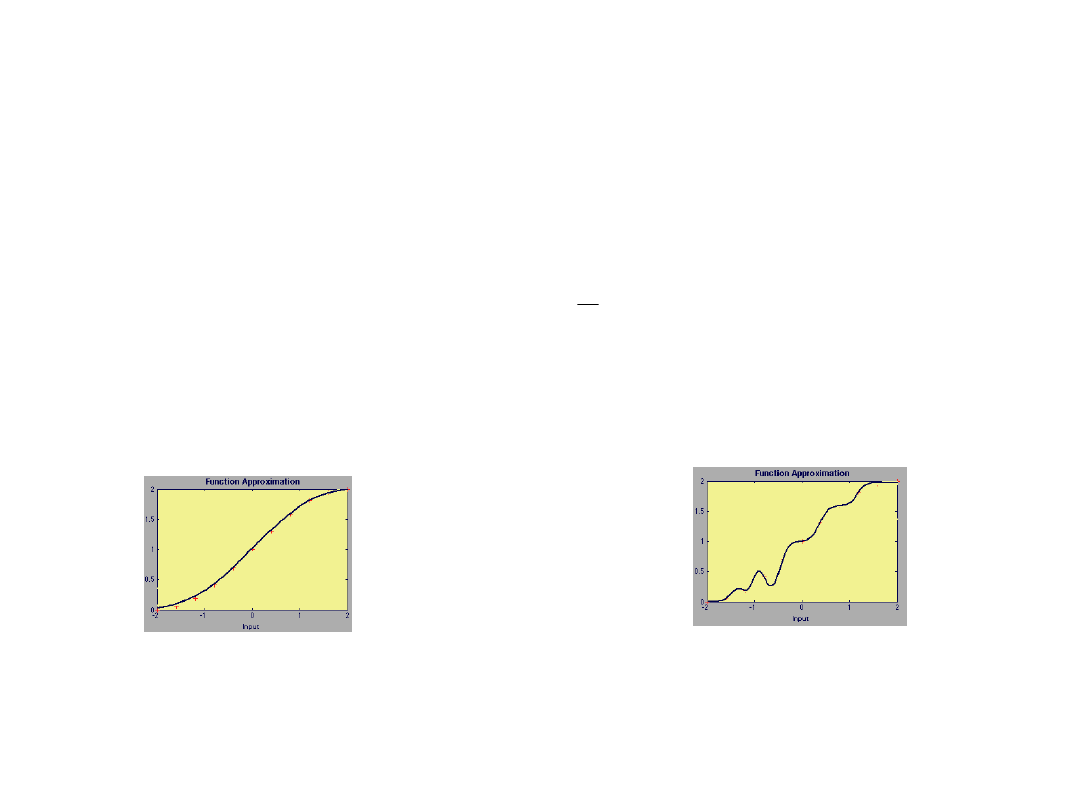
Problemy uczenia
Zbieżność
nnd11fa
Sieć: 1 – 3 – 1; logsig - linear
g(p) 1 sin(
p) dla 2p2
Funkcja aproksymowana:
a)
b)
Powód?
Minimum lokalne -punkt startowy
Problemy uczenia - uogólnianie
Zdolność do uogólnień
nnd11gn
Sieć: 1 – 2 – 1; logsig - linear
2
2
dla
)
4
sin(
1
)
(
p
p
p
g
Funkcja aproksymowana:
Zbiór danych uczących:
}
,
{
,
},
,
{
},
,
{
2
2
1
1
Q
Q
t
p
t
p
t
p
Zakładamy: Q=11, czyli p= -2, -1.6, -1.2, ..., 1.2, 1.6, 2
Sieć: 1 – 9 – 1; logsig - linear
Dlaczego?
7 parametrów
28 parametrów (18 wag + 10
bias)
- zbyt dużo stopni swobody
dla
11 danych uczących (za mało
danych)
Problemy uczenia
Właściwy dobór struktury (architektury)
sieci wpływa na:
• Dokładność
działania
• Czas uczenia
Skrócenie czasu uczenia:
• Rozwijanie technik heurystycznych
(optymalizacja współczynników uczenia,
zastosowanie momentum, itp.)
• Zastosowanie efektywniejszych technik
optymalizacji

Kilka uwag praktycznych
Jak konstruować sieć ?
Jaką wybrać topologię sieci?
• Ile warstw ukrytych?
• Ile neuronów w poszczególnych warstwach?
Brak jednoznacznej odpowiedzi (brak
teoretycznych podstaw)
Większość autorów opowiada się za stosowaniem
nie więcej niż dwóch warstw ukrytych (
o ile
nie ma istotnej potrzeby, zaleca się tylko
jedną warstwę ukrytą).
Ile warstw ukrytych ?
Sieci o większej liczbie warstw ukrytych uczą
się dłużej i proces uczenia jest słabiej
zbieżny.
Rozbudowanie sieci do dwóch warstw ukrytych
jest uzasadnione w zagadnieniach w których
sieć ma nauczyć się funkcji nieciągłych.
Zaleca się rozpoczynać zawsze od jednej
warstwy ukrytej.
Jeżeli pomimo zwiększenia liczby neuronów
sieć uczy się źle, wówczas należy podjąć
próbę
dodanie dodatkowej drugiej warstwy
ukrytej i
zmniejszyć jednocześnie liczbę
neuronów ukrytych.
Również i tutaj brak jednoznacznej odpowiedzi
Zbyt mała liczba neuronów w warstwie ukrytej
- mogą wystąpić trudności w uczenia sieci.
Zbyt duża liczba neuronów - wydłużenie czasu
uczenia jak również może doprowadzić do tzw.
nadmiernego dopasowania. Sieć uczy się wtedy
"na pamięć" pewnych szczegółów i zatraca
zdolność do uogólnień. Taka sieć uczy się
wprost idealnie i wiernie odwzorowuje
wartości zbioru uczącego. Jednakże wyniki
testowania sieci na danych spoza zbioru
uczącego są zazwyczaj bardzo słabe.
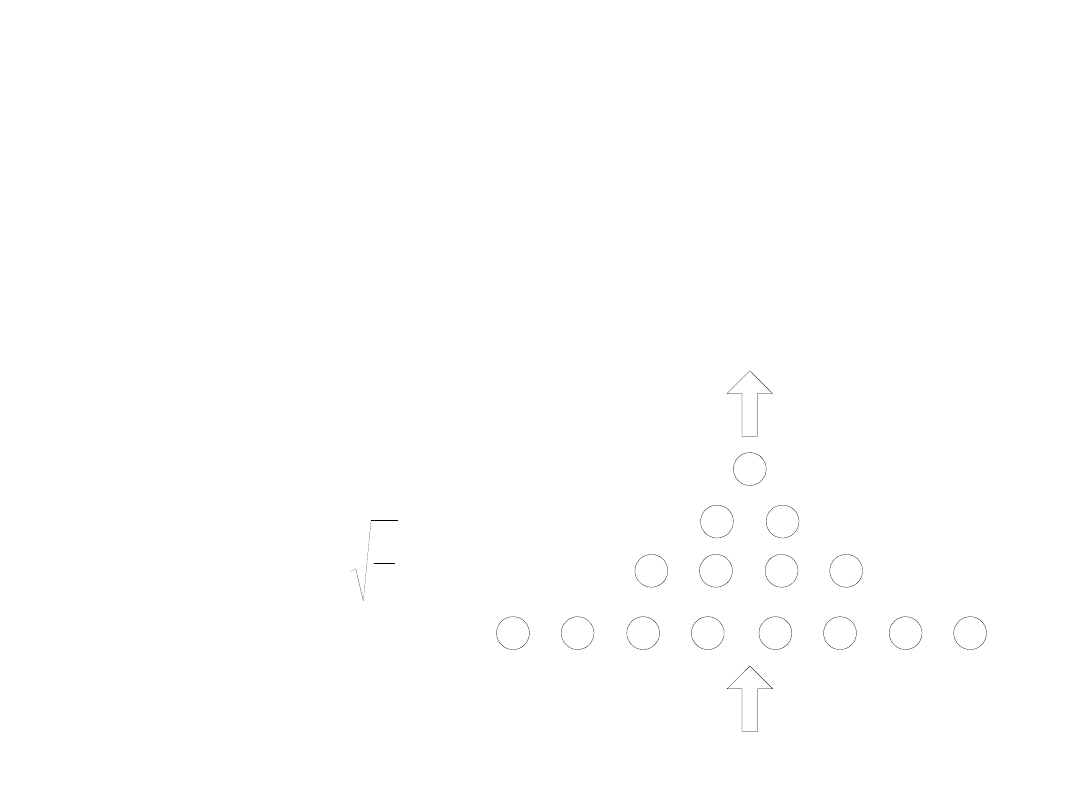
Ile neuronów w warstwach ukrytych ?
Wstępne oszacowanie liczby neuronów wg tzw.
regułę piramidy geometrycznej (liczba
neuronów maleje od wejścia do wyjścia zgodnie
z postępem geometrycznym).
kn
WE
WY
kn
n
k
Przykładowo, dla
sieci
trójwarstwowej o n
neuronach na
wejściu i k
neuronach na
wyjściu, warstwa
ukryta powinna
mieć
neuronów.
Ile neuronów w warstwach ukrytych ?
Dla sieci o czterech warstwach (dwóch
warstwach ukrytych), liczba neuronów w
poszczególnych warstwach wynosi:
WE
WY
2
kr
n
k
kr
kr
l
k
n
r
gdzie
kr
l
2
3
2
1
Ile neuronów w warstwach ukrytych ?

Wzory powyższe nie dają recepty na optymalną
topologię sieci.
Przykładowo, jeżeli sieć wykorzystywana jest do
aproksymacji złożonej funkcji jednej zmiennej,
wówczas na wejściu i wyjściu sieć ma tylko po
jednym neuronie, natomiast warstwa ukryta
zazwyczaj musi być rozbudowana.
Poszukiwanie optymalnej struktury sieci jest
zwykle czasochłonne i żmudne.
Zazwyczaj zaczynamy uczenie sieci o małej
liczbie neuronów i stopniowo ją rozbudowujemy w
miarę potrzeb. Sieć zbyt rozbudowana powoduje
utratę zdolności do uogólniania (sieć uczy się
na pamięć).
Jak konstruować sieć ?

Reasumując:
Ze względu na fakt, że brak jest
teoretycznych przesłanek do projektowania
topologii sieci, zgodnie z zaleceniami
podanymi przez Masters'a, we wstępnych
pracach nad siecią dobrze jest przestrzegać
następujących 3 zasad:
1. należy stosować tylko jedną warstwę ukrytą,
2. należy używać niewielu neuronów ukrytych,
3. należy uczyć sieć do granic możliwości.
Jak konstruować sieć ?
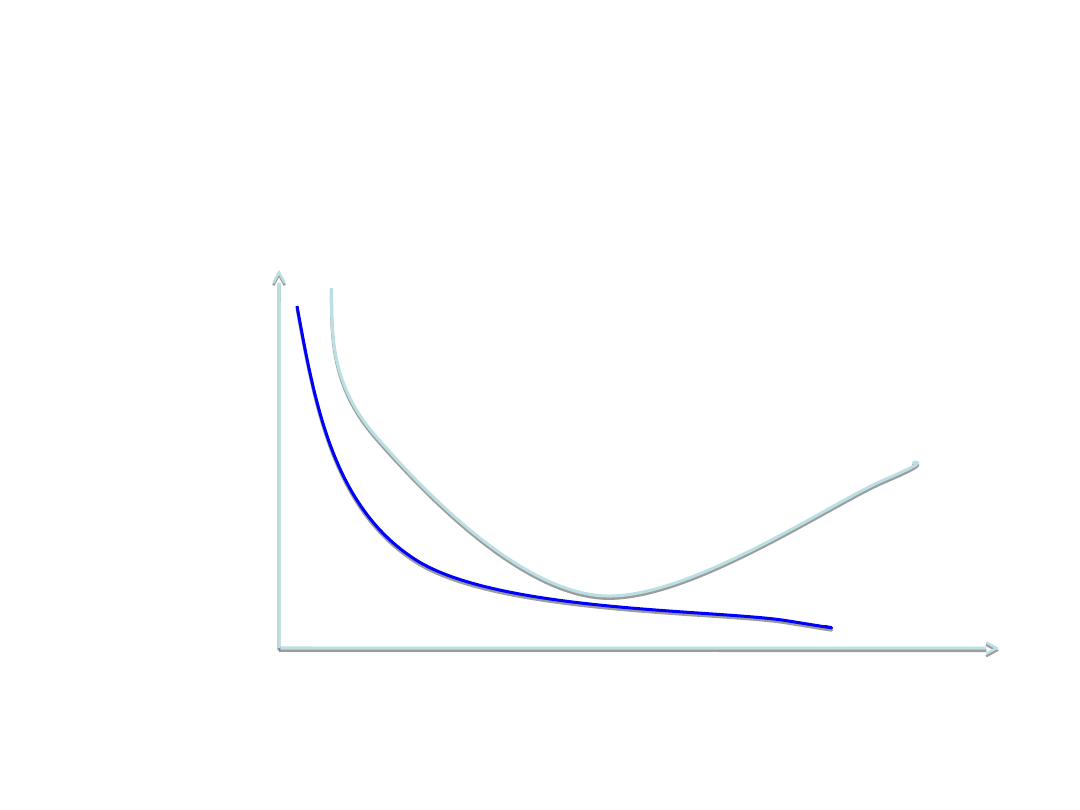
Oznaką przetrenowania jest wzrost błędu dla
danych testowych, przy malejącym błędzie
danych uczących
Jak długo uczyć sieć ?
b
ł
ą
d
l. iteracji
test
uczenie
Podstawy Sztucznej Inteligencji
Jan Kusiak
• Dla każdej próbnej liczby neuronów ukrytych
tworzymy losowe wagi początkowe i uczymy
sieć do chwili, gdy przestajemy osiągać
poprawę.
• Następnie przyjmujemy inne wartości wag
początkowych i powtarzamy proces uczenia.
Gdy nie zauważamy zmian, sieć możemy uznać
za nauczoną.
• Sprawdzamy działanie sieci przy pomocy
danych testowych. Jeżeli jakość sieci jest
wyraźnie gorsza niż na zbiorze uczącym, to:
- albo zbiór uczący jest zły (za mały
lub mało reprezentatywny)
- albo mamy za dużo neuronów ukrytych.
Sieć jest przetrenowana.
Prawidłowa procedura uczenia sieci
Podstawy Sztucznej Inteligencji
Jan Kusiak
• Ocena jakości sieci
• Zbiór danych do uczenia sieci
• Skalowanie sygnałów
• Liczebność zbioru danych uczących
• Rozkład danych w zbiorze uczącym
• Trendy danych uczących
• Sieć nie ma zdolności do ekstrapolacji
Prawidłowa procedura uczenia sieci
Document Outline
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Uczenie neuronu
- Slide 9
- Slide 10
- Slide 11
- Sieć neuronowa
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Budowa sieci
- Slide 25
- Techniki uczenia sieci neuronowych
- Slide 27
- Slide 28
- Uczenie sieci jednowarstwowej
- Uczenie sieci jednowarstwowej
- Uczenie sieci jednowarstwowej
- Uczenie sieci jednowarstwowej
- Uczenie sieci jednowarstwowej
- Uczenie sieci jednowarstwowej
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Algorytm uczenia ciągłej jednowarstwowej sieci
- Algorytm uczenia ciągłej jednowarstwowej sieci
- Algorytm uczenia ciągłej jednowarstwowej sieci
- Uczenie sieci wielowarstwowej
- Algorytm wstecznej propagacji błędu
- Algorytm wstecznej propagacji błędu
- Algorytm wstecznej propagacji błędu
- Algorytm wstecznej propagacji błędu
- Algorytm wstecznej propagacji błędu
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Jak konstruować sieć ?
- Ile warstw ukrytych ?
- Slide 58
- Slide 59
- Slide 60
- Jak konstruować sieć ?
- Jak konstruować sieć ?
- Slide 63
- Slide 64
- Slide 65
Wyszukiwarka
Podobne podstrony:
PSI 2011 12 w 3 SSN 2
PSI 2011 12 w 2 SSN 1
PSI 2011 12 w 6 SSN SOM
PSI 2011 12 w 5 SSN 4
PSI 2011 12 w 3 bis SSN 2
PSI 2011 12 w 9 SE 1
PSI 2011 12 w 10 SE 2
PSI 2011 12 w 8 Model i Metamodel
PSI 2011 12 w 7 rekurencyjne 1
PSI 2011 12 w 1 wstep
K1 2011 12 zad 2
1 MSL temat 2011 12 zaoczneid 1 Nieznany
więcej podobnych podstron