Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Jak to wszystko działa?
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Zacznijmy od początku,
…czyli od perceptronu
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
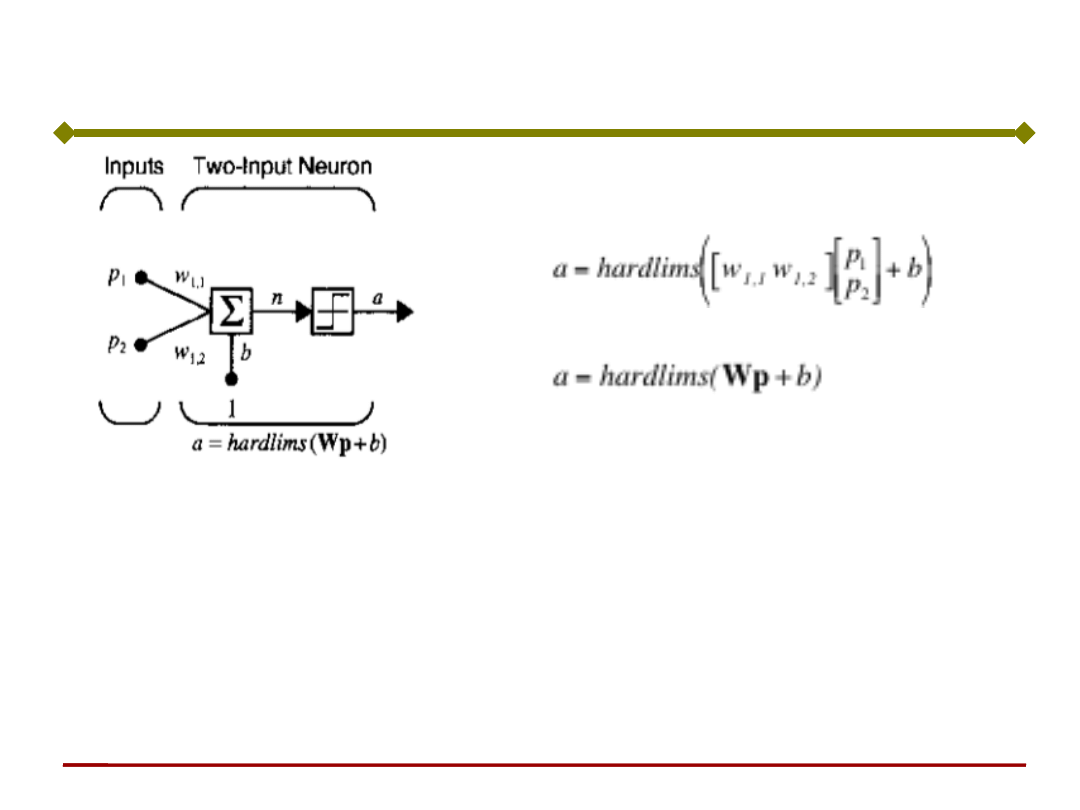
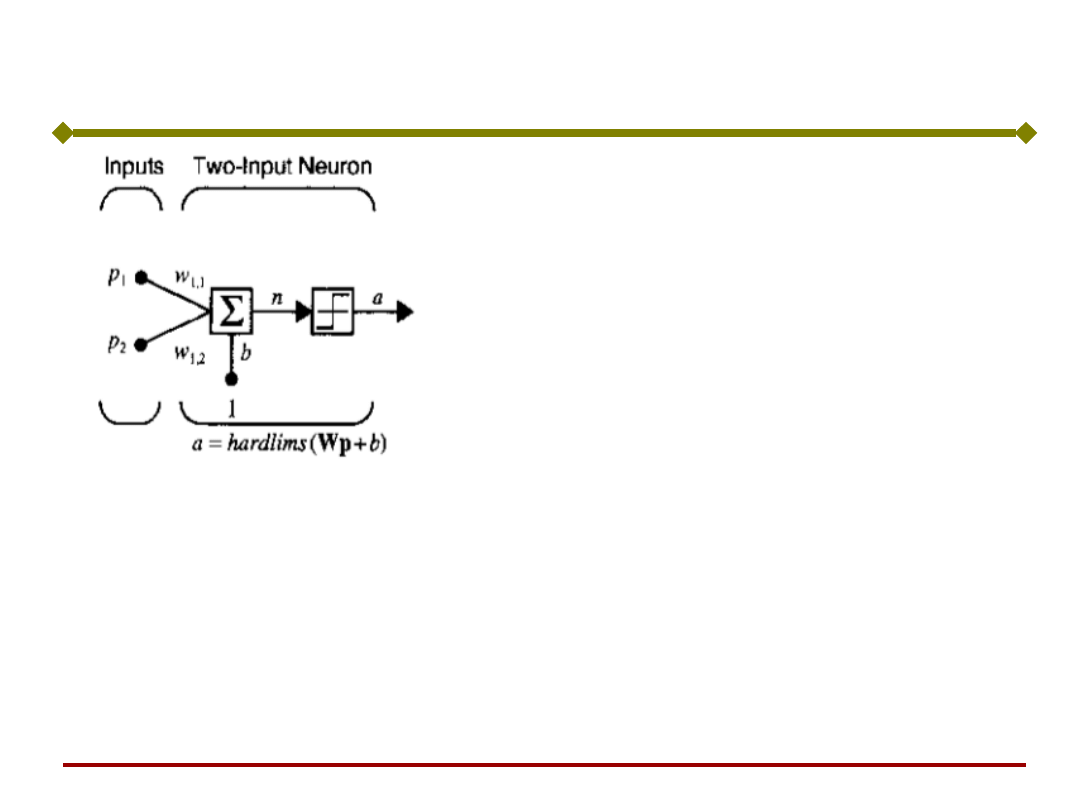
Perceptron o dwóch wejściach
Uwaga:
Binarna funkcja aktywacji nadaje
perceptronowi własności klasyfikatora
sygnałów wejściowych.
czyli:
Dzieli przestrzeń wektora wejściowego na
dwa obszary.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
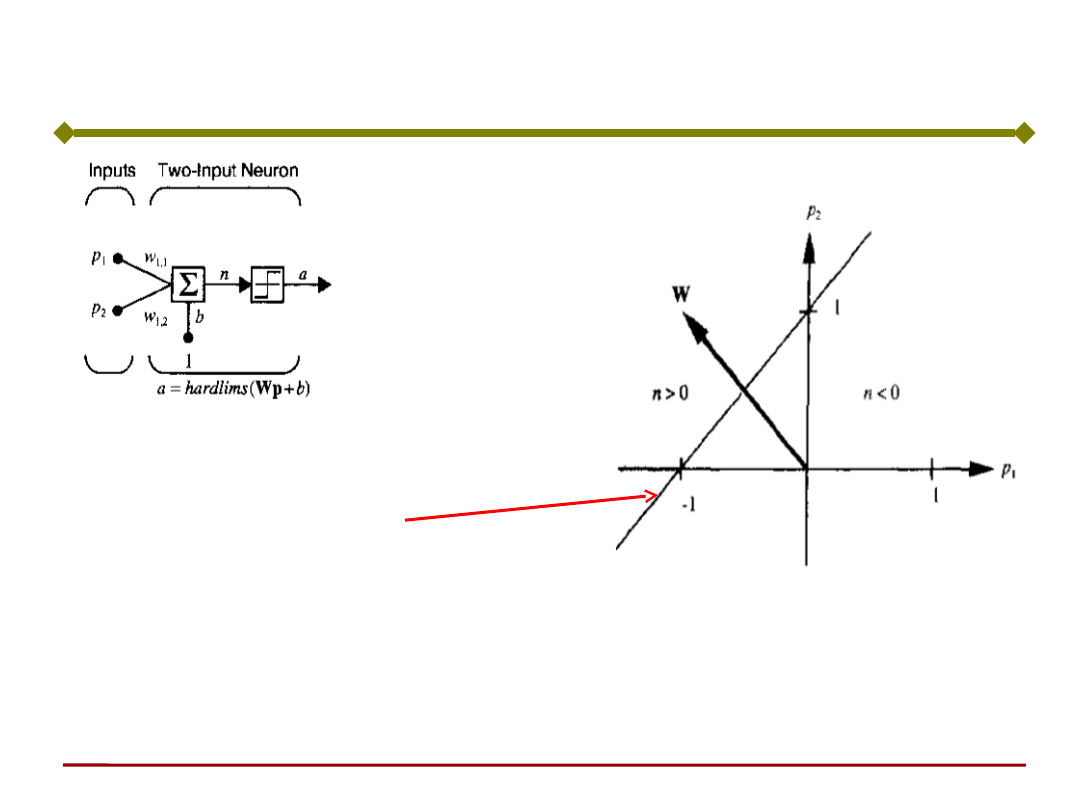
Perceptron o dwóch wejściach
b = -1
w
1,1
= -1; w
1,2
= +1
Niech
:
n = w
T
p=[-1 1]p - 1 =
0
Granica decyzyjna jest
wyznaczona przez:
Granica ta jest prostopadła do wektora wag W i
przesunięta o wartość b.
Wektor W wskazuje obszar wartości dodatnich sygnału
wyjściowego.
€
a=hardlimsw
1,1
w
1,2
[
]
p
1
p
2
⎡
⎣
⎢
⎤
⎦
⎥ +b
⎛
⎝
⎜
⎞
⎠
⎟
€
n=Wp+b=0
Gdy perceptron ma R wejść, wówczas dzieli R-
wymiarową przestrzeń wektorów wejściowych p
na dwie półprzestrzenie.
Są rozdzielone R-1- wymiarową
hiperpłaszczyzną, nazywaną granicą decyzyjną
o równaniu:
0
1
b
p
w
i
R
i
i
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Perceptron (granica decyzyjna)
Czy perceptron można użyć do sortowania jabłek i pomarańczy?
3 sygnały wejściowe:
• p
1
- kształt,
• p
2
- tekstura skórki,
• p
3
- waga
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Perceptron jako klasyfikator
p
i
[ 1, 1]
Wzorzec pomarańczy: P
T
= [1 -1 -1]
T
Wzorzec jabłka: P
T
= [1 1 -1]
T
a = 1
a = -1
Perceptron jako prosta maszyna do sortowania
owoców.
Budowa:
1 neuron o 3 wejściach (bipolarna, binarna
funkcja aktywacji hardlims):
W = [0 1 0]
b = 0
Wzorzec pomarańczy: p
T
= [1 -1 -1]
T
;
a = hardlims(n) = harlims( [0 1 0]p + 0) =
-1
Wzorzec jabłka: p
T
= [1 1 -1]
T
a = hardlims(n) = harlims( [0 1 0]p + 0) = 1
Podstawy Sztucznej
Inteligencji
Jan Kusiak
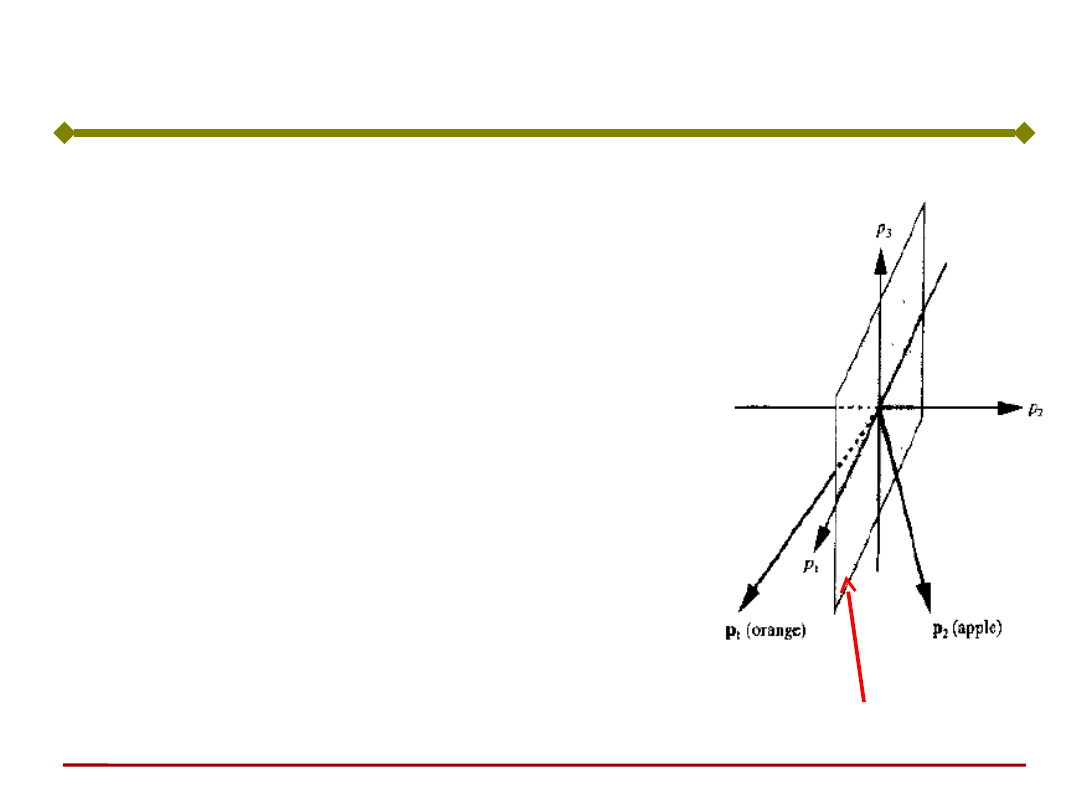
Perceptron jako klasyfikator
Płaszczyzna decyzyjna: p
2
= 0
ahardlimsw
1,1
w
1,2
w
1,3
p
1
p
2
p
3
b
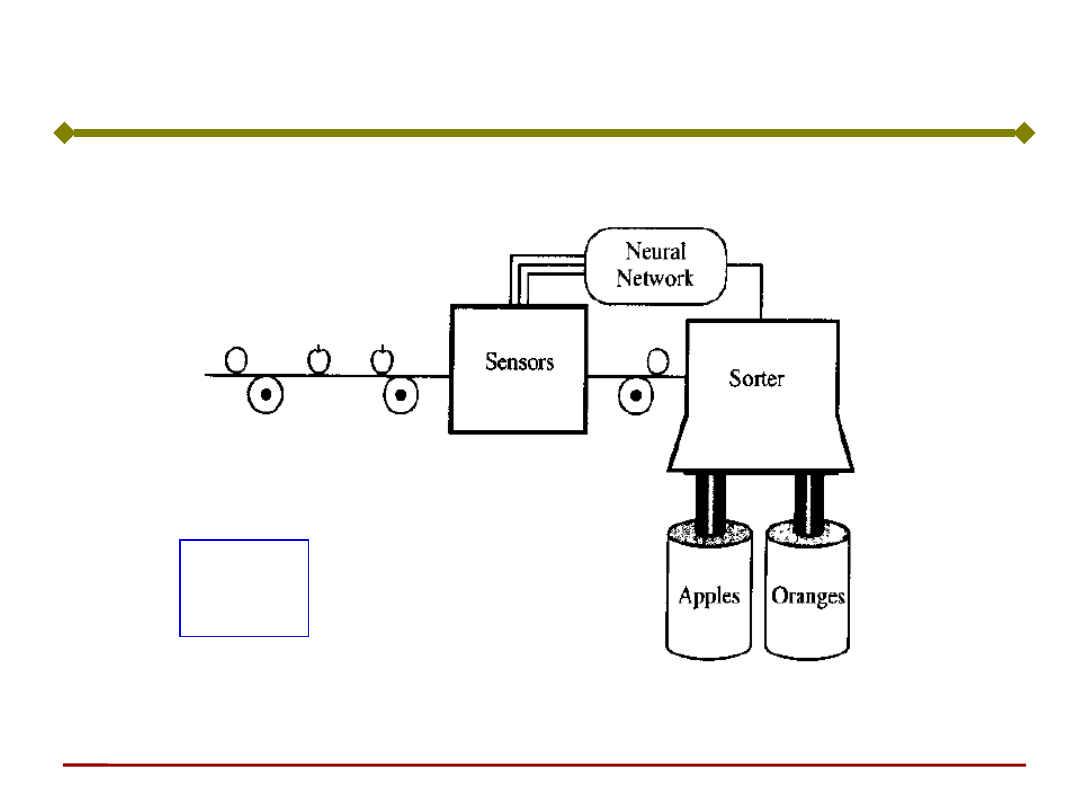
Prosta maszyna do sortowania owoców – jabłka i pomarańcze
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Perceptron jako klasyfikator
nnd3
pc
Podstawy Sztucznej
Inteligencji
10
Jan Kusiak
Perceptron o dwóch wejściach - podsumowanie
Sygnał wyjściowy:
€
a =hardlims
(n) =hardlims
(Wp+b) =
=hardlims
(wT p+b)
=hardlims
(w
1,1
p
1
+w
1,2
p
2
+b) =0
Granica decyzyjna (linia na płaszczyźnie
sygnałów wejściowych) jest określona przez
wektor sygnałów wejściowych, dla których
sygnał n = 0, czyli
€
n =wT p+b=w
1,1
p
1
+w
1,2
p
2
+b=0
€
n=
Wp+b
=0
Podstawy Sztucznej
Inteligencji
13
Jan Kusiak
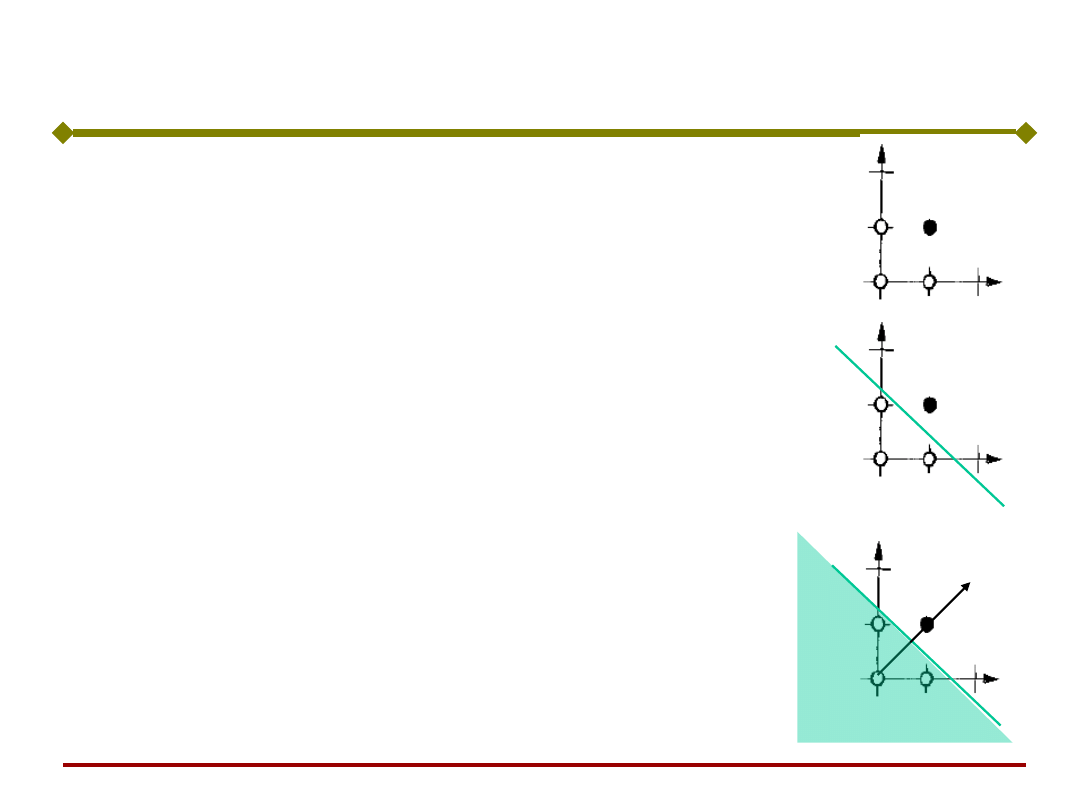
Perceptron o dwóch wejściach – przykład (1)
Przykład perceptronu realizującego bramkę AND
(o 2 wejściach)
Pary sygnałów WE/WY oznaczamy jako (p
i
, t
i
)
mają wartości:
1
,
1
1
,
0
,
0
1
,
0
,
1
0
,
0
,
0
0
4
4
3
3
2
2
1
1
t
t
t
t
p
p
p
p
Podstawy Sztucznej
Inteligencji
15
Jan Kusiak
Graficznie bramkę AND przedstawia
rysunek. Czarny punkt wskazuje
sygnał wyjściowy t = 1, a puste
punkty wartość 0.
Spróbujmy wyznaczyć granicę
decyzyjną, czyli linię
oddzielającą białe punkty od
czarnych.
Następnie musimy wyznaczyć wektor
wag, który jest prostopadły do
granicy decyzyjnej. Wektor wag
może mieć dowolną długość. Niech:
€
w =
2
2
⎡
⎣
⎢
⎤
⎦
⎥
w
1
AND
Perceptron o dwóch wejściach – przykład (2)
Podstawy Sztucznej
Inteligencji
16
Jan Kusiak
Na koniec musimy wyznaczyć wartość progową b.
Określimy to wybierając dowolny punkt leżący na
linii decyzyjnej i spełniający równanie:
€
wT p+b=0
Jeżeli, przykładowo wybierzemy:
T
T
0
5
.
1
p
to:
€
wT p+b= 2 2
[
]
1.5
0
⎡
⎣
⎢
⎤
⎦
⎥
+b=3+b=0 ⇒
b=−3
Przetestujemy sieć na jednej z par sygnałów
wejściowych, np. p
2
=[0,1]
T
€
a=hardlim(
w
T
p
2
+b) =hardlim2 2
[
]
0
1
⎡
⎣
⎢
⎤
⎦
⎥ −3
⎛
⎝
⎜
⎞
⎠
⎟ =hardlim(-1)
=0
Perceptron o dwóch wejściach – przykład (3)
Podstawy Sztucznej
Inteligencji
17
Jan Kusiak
Perceptron o dwóch wejściach
Przykład granicy decyzyjnej nnd4db
Podstawy Sztucznej
Inteligencji
18
Jan Kusiak
Perceptron działa poprawnie, gdy wagi
przyjmują odpowiednią wartość,
czyli gdy
perceptron jest nauczony.
Proces uczenia wiąże się z modyfikowaniem
wag synaptycznych.
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Sztuczne Sieci Neuronowe 1
Działanie perceptronu
Podstawy Sztucznej
Inteligencji
19
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Jak uczyć neuron?
Podstawy Sztucznej
Inteligencji
20
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie neuronu
Uczenie z nauczycielem (nadzorowane)
Na wejściu sieci pokazuje się wektor sygnałów
wejściowych, natomiast na wyjściu pokazuje się oczekiwane
wartości sygnałów wyjściowych.
Zadaniem uczenia sieci jest dokonanie takiej korekty
współczynników wagowych, aby zmniejszyć różnicę pomiędzy
oczekiwaną, a rzeczywistą odpowiedzią sieci.
Uczenie bez nauczyciela
Prezentuje się jedynie wektor sygnałów wejściowych.
Zadaniem sieci jest samodzielne utworzenie kategorii do
których będą klasyfikowane prezentowane wektory,
samodzielnie odnajdując przy tym podobieństwa pomiędzy
poszczególnymi obiektami - klasyfikacja obiektów.
Podstawy Sztucznej
Inteligencji
21
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
Proces uczenia polega na korygowaniu wartości
współczynników wagowych.
Uczenie neuronu
Początkowe wartości składowych wektora wag nie
mają większego znaczenia i z reguły nadaje się im
wartości losowe.
Podstawy Sztucznej
Inteligencji
22
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Nadzorowane uczenie neuronu polega na tym, że
neuronowi prezentowane jest pewne zadanie z
gotowym rozwiązaniem.
Uczenie neuronu
"Nauczyciel" uczący neuron zna prawidłowe
odpowiedzi na zadane sygnały wejściowe i porównuje
je z sygnałami wyjściowymi neuronu.
Zadaniem neuronu jest rozpoznanie sygnału
wejściowego i generowanie odpowiedniego sygnału
wyjściowego. Umiejętność taką neuron zdobywa w
trakcie uczenia.
Podstawy Sztucznej
Inteligencji
23
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Podstawy Sztucznej
Inteligencji
Jan Kusiak
W procesie uczenia, "nauczyciel" dysponuje określonym
ciągiem uczącym złożonym z par sygnałów wejście -
wyjście:
gdzie:
(p
i
, t
i
) - i-ta para danych uczących
p
i
- wektor sygnałów wejściowych i-tego elementu zbioru uczącego,
t
i
- oczekiwana (zadana) wartość odpowiedzi neuronu na i-ty wektor
wejścia uczącego,
Q - liczba elementów ciągu uczącego U.
Uczenie neuronu
U{(p
1
,t
1
),(p
2
,t
2
),...,(p
Q
,t
Q
)}
Korekta wag ma na celu zmniejszenie różnicy
pomiędzy oczekiwaną wartością odpowiedzi t, a
rzeczywistą odpowiedzią neuronu a.
Podstawy Sztucznej
Inteligencji
24
Jan Kusiak
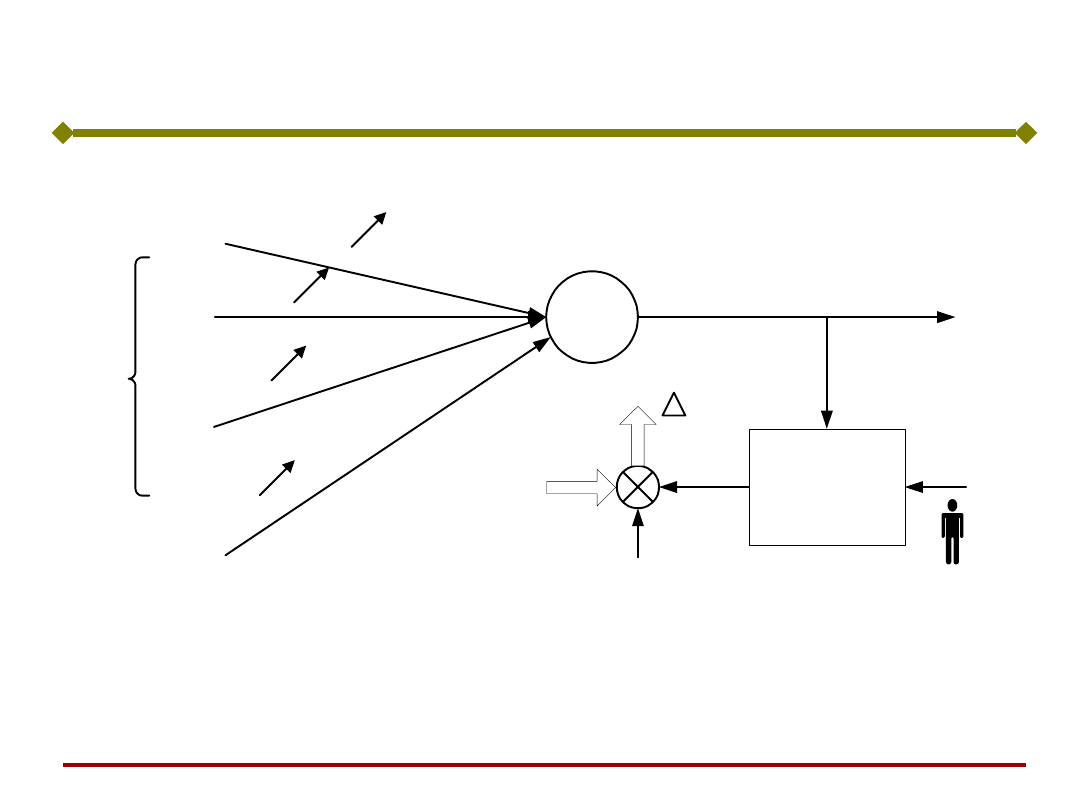
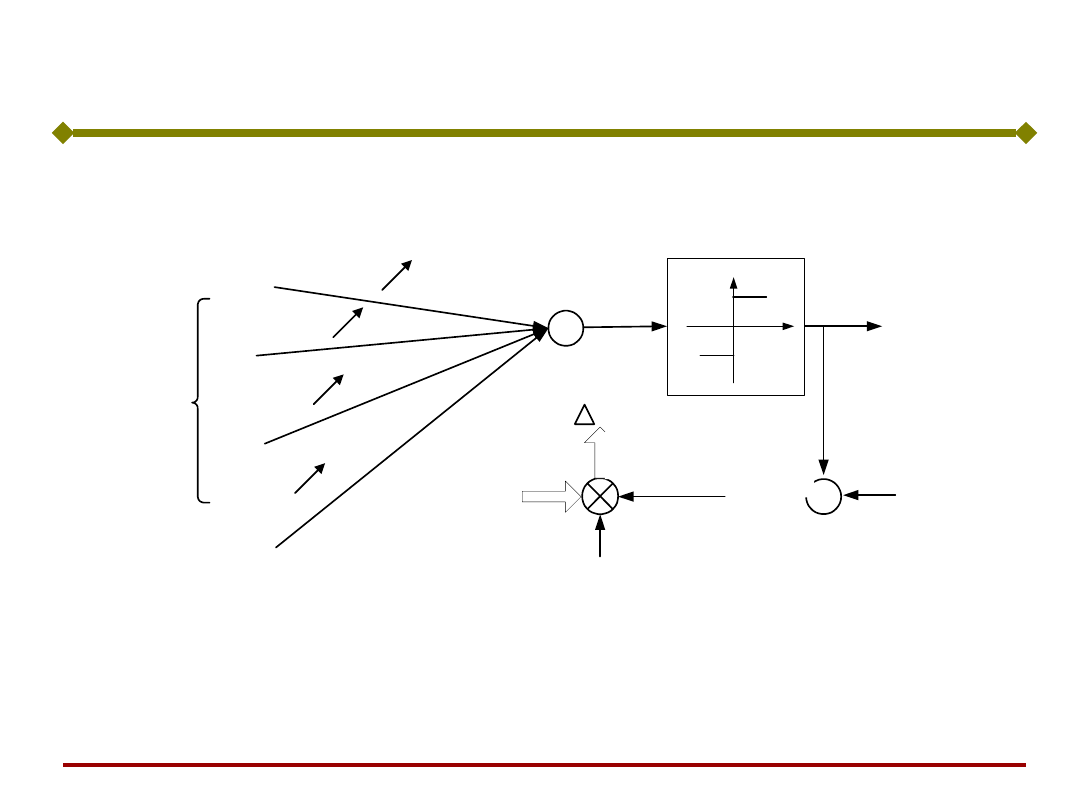
Ogólna zasada uczenia neuronu:
Wektor wag w
i
= [w
i1
, w
i2
,...,w
in
]
T
rośnie
proporcjonalnie do iloczynu sygnałów
wejściowego x i uczącego r
(Amari, Żurada).
x
1
x
2
w
i1
.
.
.
.
.
.
i-ty neuron
w
ij
w
i2
w
in
x
j
x
n
y
i
generator
sygnału
uczącego
d
i
x
w
i
x
c
r
t
i
Podstawy Sztucznej
Inteligencji
25
Jan Kusiak
c - stała uczenia c > 0, (c wpływa na szybkość
uczenia).
Wektor zmodyfikowanych wag w kolejnym kroku
czasowym k+1 wynosi więc:
€
r =r(w
i
,x,t
i
)
Sygnał uczący r jest w ogólności funkcją w
i
,
x oraz sygnału nauczyciela t
i
:
Zgodnie z ogólną regułą uczenia, przyrost
wektora w
i
w kolejnym kroku uczenia
zachodzącym w chwili k wynosi:
€
Δw
i
k
=cr(w
i
k
,x
k
,t
i
k
)x
k
€
w
i
k+1
=w
i
k
+cr(w
i
k
,x
k
,t
i
k
)x
k
Ogólna zasada uczenia neuronu:
Podstawy Sztucznej
Inteligencji
26
Jan Kusiak
Początkowa wartość składowych wektora wag nie ma
większego znaczenia. Z reguły nadaje się im wartości
losowe (nie mogą być zbyt duże, gdyż może to
spowodować ich rozbieganie się).
Ogólna zasada uczenia neuronu:
Podstawy Sztucznej
Inteligencji
27
Jan Kusiak
Podstawy Sztucznej Inteligencji
Jan Kusiak
Uczenie perceptronu
Podstawy Sztucznej
Inteligencji
28
Jan Kusiak
Reguła perceptronowa jest jedną z metod
uczenia nadzorowanego, stosowaną do sieci z
neuronami dyskretnymi.
Reguła uczenia perceptronowego
Sygnał uczący r jest różnicą pomiędzy
odpowiedzią pożądaną a odpowiedzią
uzyskiwaną z sieci (Rosenblatt, 1958);
€
r =t
i
−y
i
)
( x
w
sign
y
T
i
+
x
1
x
2
w
i1
.
.
.
.
.
.
w
ij
w
i2
w
in
x
j
x
n
y
i
d
i
x
w
i
x
-1
1
s
+
d
i
- y
i
+
-
c(d
i
- y
i
)x
c
s
i
t
i
c(t
i
- y
i
)x
t
i
- y
i
Podstawy Sztucznej
Inteligencji
29
Jan Kusiak
Korygowanie współczynników wag synaptycznych
(dla bipolarnej funkcji aktywacji) odbywa się
według zależności:
€
Δw=c(t−y) =c[t−sign(w
T
x)]x
Ponieważ sygnał odpowiedzi perceptronu
przyjmuje wartość albo 1, albo -1, algorytm
"doregulowania" wag redukuje się do postaci:
przy czym znak plus dotyczy przypadku, gdy
t
i
= 1 zaś minus w przypadku przeciwnym.
cx
w
i
2
Reguła uczenia perceptronowego
Dostrojenie wag następuje tylko wtedy,
kiedy występuje błąd odwzorowania przez
neuron.
Podstawy Sztucznej
Inteligencji
30
Jan Kusiak
1. Wybieramy losowo początkowe wartości wag.
2. Podajemy na wejście neuronu wektor uczący
x=x(τ)=[x
0
(τ), x
1
(τ),..., x
n
(τ)]
T
,
τ=1,2,....
3. Obliczenie wartości wyjściowej perceptronu
y.
4. Porównanie wartości wyjściowej y(τ) z
wartością wzorcową (uczącą) t=t(x(τ)).
5. Modyfikacja wag:
w
i
(τ+1) = w
i
(τ) + (t – y)x
i
(τ)
6. Powrót do punktu 2.
Algorytm uczenia perceptronu
Algorytm powtarzany jest dopóty, dopóki błąd
na wyjściu nie będzie mniejszy od
założonego, dla wszystkich wektorów ciągu
uczącego.
(Warunek: dane uczące reprezentują klasy
liniowo separowalne
)
Podstawy Sztucznej
Inteligencji
32
Jan Kusiak
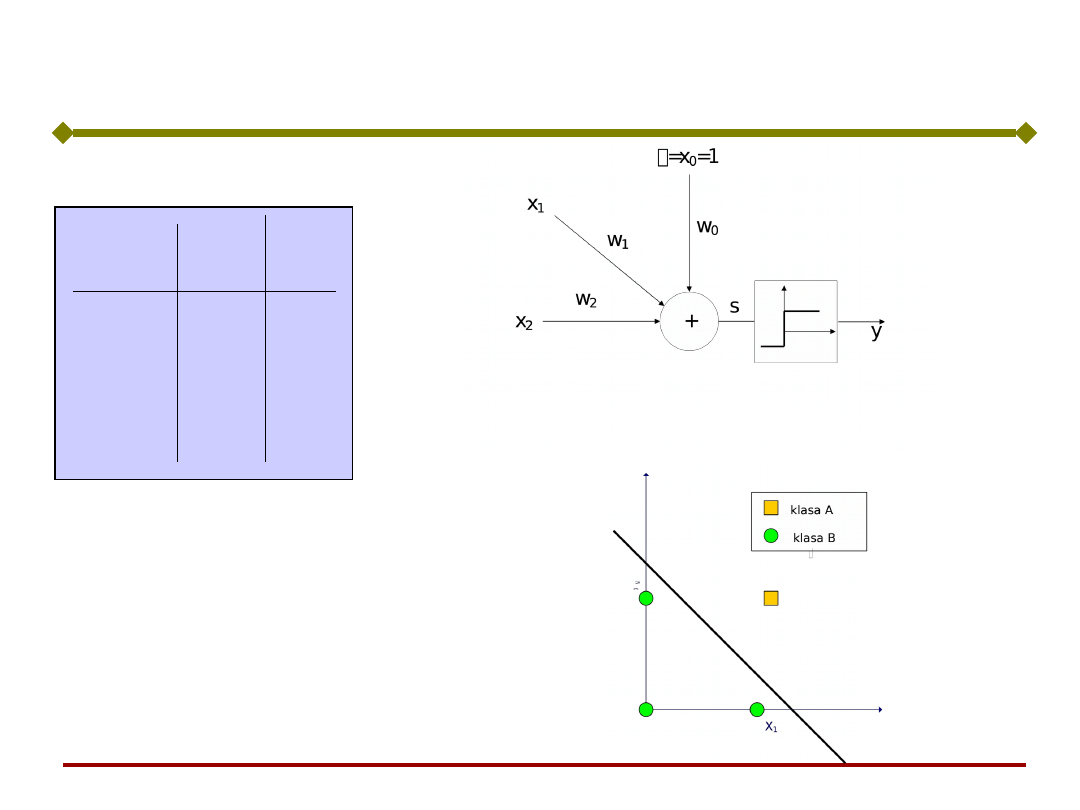
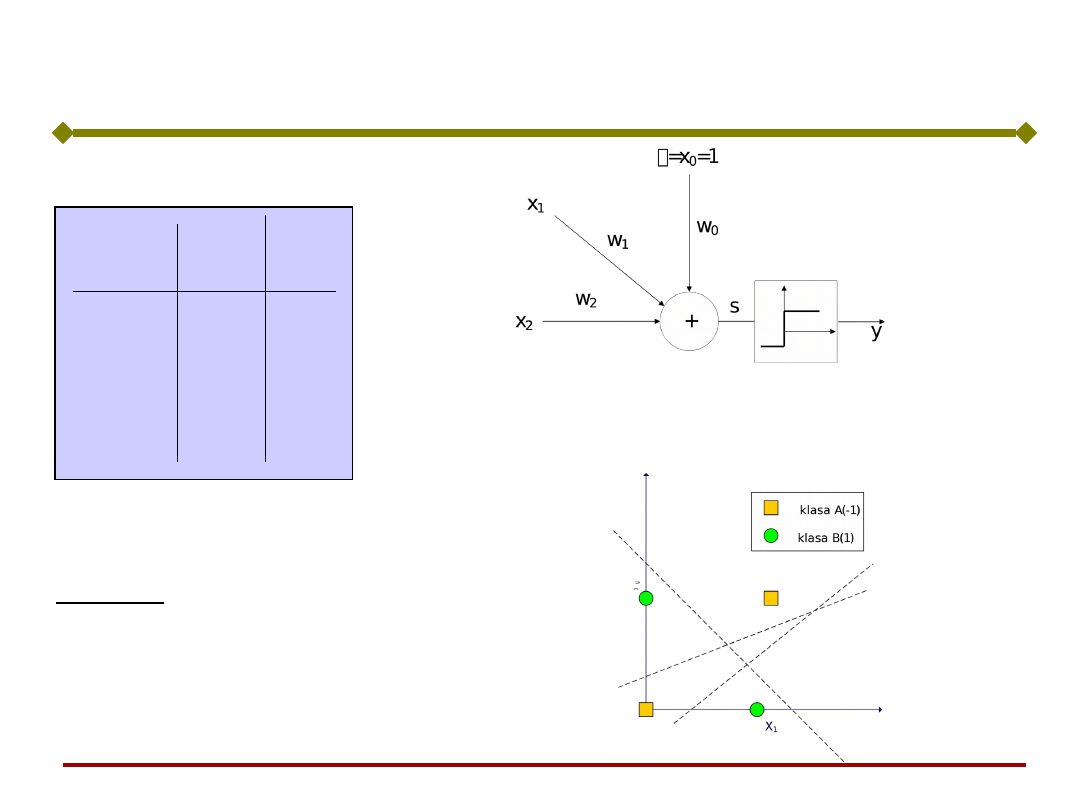
Liniowa separowalność
Definicja. Dwa zbiory
punktów A i B z n
wymiarowej przestrzeni
wejściowej s są
liniowo separowalne
jeżeli istnieje n + 1
wartości w
0
, . . . ,w
n
takich,
że dla każdego punktu
x A zachodzi:
n
i
i
i
w
x
w
1
0
a dla każdego punktu x B zachodzi:
n
i
i
i
w
x
w
1
0
B
A
x
2
X
1
Podstawy Sztucznej
Inteligencji
33
Jan Kusiak
Liniowa separowalność - przykład
Funkcja logiczna AND:
€
y = f (s) =sgnw
0
+w
1
x
1
+w
2
x
2
(
)
x
1
x
2
Y
0 0 -1
0 1 -1
1 0 -1
1 1 1
Podstawy Sztucznej
Inteligencji
34
Jan Kusiak
Liniowo nieseparowalna funkcja - przykład
Funkcja logiczna XOR:
x
1
x
2
Y
0 0 -1
0 1 1
1 0 1
1 1 -1
Uwaga: Perceptron nie
może się
nauczyć funkcji liniowo
nieseparowalnej (ale
może to zrobić sieć)
€
y = f (s) =sgnw
0
+w
1
x
1
+w
2
x
2
(
)
Podstawy Sztucznej
Inteligencji
35
Jan Kusiak
Przykład uczenia perceptronu:
Początkowe wartości wag: w
1
= [1, -1, 0, 0.5]
T
(indeks górny oznacza numer kroku uczenia).
Stała uczenia przyjmuje wartość
c = 0.1.
Lp
.
x
1
x
2
x
3
x
4
t
1
1
-1
0
-
1
-
1
2
0
1.
5
-
0.
5
-
1
-
1
3
-
1
1
0.
5
1
1
Zbiór uczący składa się z następujących wartości:
Podstawy Sztucznej
Inteligencji
36
Jan Kusiak
Krok 1: Na wejściu
prezentacja
pierwszego sygnału
uczącego x
1
:
5
.
1
1
0
1
1
]
5
.
0
,
0
,
1
,
1
[
)
(
1
1
x
w
s
T
Przykład uczenia perceptronu:
Ponieważ sygnał wyjściowy y
1
= sign(s
1
) =
sign(1.5) = 1 jest różny od sygnału uczącego t
1
= -1, musi nastąpić korekcja współczynników
wagowych. Nowy wektor wag obliczony zostaje
zgodnie z regułą perceptronową:
7
.
0
0
8
.
0
8
.
0
1
0
1
1
2
.
0
5
.
0
0
1
1
)
1
1
(
1
.
0
1
1
2
x
w
w
Podstawy Sztucznej
Inteligencji
37
Jan Kusiak
Krok 2: Na wejściu prezentacja kolejnego,
drugiego sygnału uczącego x
2
:
Ponieważ sygnał wyjściowy y
2
= sign(s
2
) =
sign(-1.1) = -1 jest zgodny z sygnałem
uczącym t
2
= -1, nie następuje korekcja wag i
w
3
= w
2
.
1
.
1
1
5
.
0
5
.
1
0
]
7
.
0
0
8
.
0
8
.
0
[
)
(
2
2
2
x
w
s
T
Podstawy Sztucznej
Inteligencji
38
Jan Kusiak
Krok 3: Na wejściu prezentacja kolejnego,
trzeciego sygnału uczącego x
3
:
Sygnał wyjściowy y
3
= sgn(s
3
) = sgn(-2.3) = -1
jest różny od wartości sygnału uczącego d
3
= 1,
musi nastąpić korekcja wag. Skorygowany wektor
wag przyjmuje wartość:
3
.
2
1
5
.
0
1
1
]
7
.
0
0
8
.
0
8
.
0
[
)
(
3
3
3
x
w
s
T
5
.
0
1
.
0
6
.
0
6
.
0
1
5
.
0
1
1
2
.
0
7
.
0
0
8
.
0
8
.
0
)
1
1
(
1
.
0
3
3
4
x
w
w
Podstawy Sztucznej
Inteligencji
39
Jan Kusiak
Ponieważ zbiór uczący składa się z 3
prezentacji, pierwszy cykl uczenia na tym się
kończy.
Błąd uczenia perceptronu trudno jest oszacować
z uwagi na binarne wartości sygnału
wyjściowego. Dlatego jakość wytrenowania można
ocenić obserwując sygnał pobudzenia s.
Spróbujmy obliczyć wartość pobudzenia s
4
po
podaniu sygnału x
1
na wejście nauczonego w
powyższy sposób perceptronu. Sygnał pobudzenia
przyjmie wartość:
i jest znacznie bliższy wartości ujemnej
sygnału oczekiwanego, niż to miało miejsce na
początku uczenia (wtedy s
4
= 2.5).
Przeprowadzenie kolejnego cyklu uczenie
pozwoli na zmniejszenie błędu uczenia.
7
.
0
)
(
1
4
2
x
w
s
T
Document Outline
- Slide 1
- Slide 2
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 13
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Jak uczyć neuron?
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Uczenie perceptronu
- Reguła uczenia perceptronowego
- Reguła uczenia perceptronowego
- Slide 30
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
Wyszukiwarka
Podobne podstrony:
PSI 2011 12 w 2 SSN 1
PSI 2011 12 w 6 SSN SOM
PSI 2011 12 w 5 SSN 4
PSI 2011 12 w 4 SSN 3
PSI 2011 12 w 3 bis SSN 2
PSI 2011 12 w 9 SE 1
PSI 2011 12 w 10 SE 2
PSI 2011 12 w 8 Model i Metamodel
PSI 2011 12 w 7 rekurencyjne 1
PSI 2011 12 w 1 wstep
K1 2011 12 zad 2
1 MSL temat 2011 12 zaoczneid 1 Nieznany
więcej podobnych podstron