
Prof. Stanisław Kuta
Katedra Elektroniki AGH
e-mail: kuta@uci.agh.edu.pl
UKŁADY Z FAZOWĄ PĘTLĄ
SPRZĘŻENIA ZWROTNEGO
Liniowy model pętli fazowej
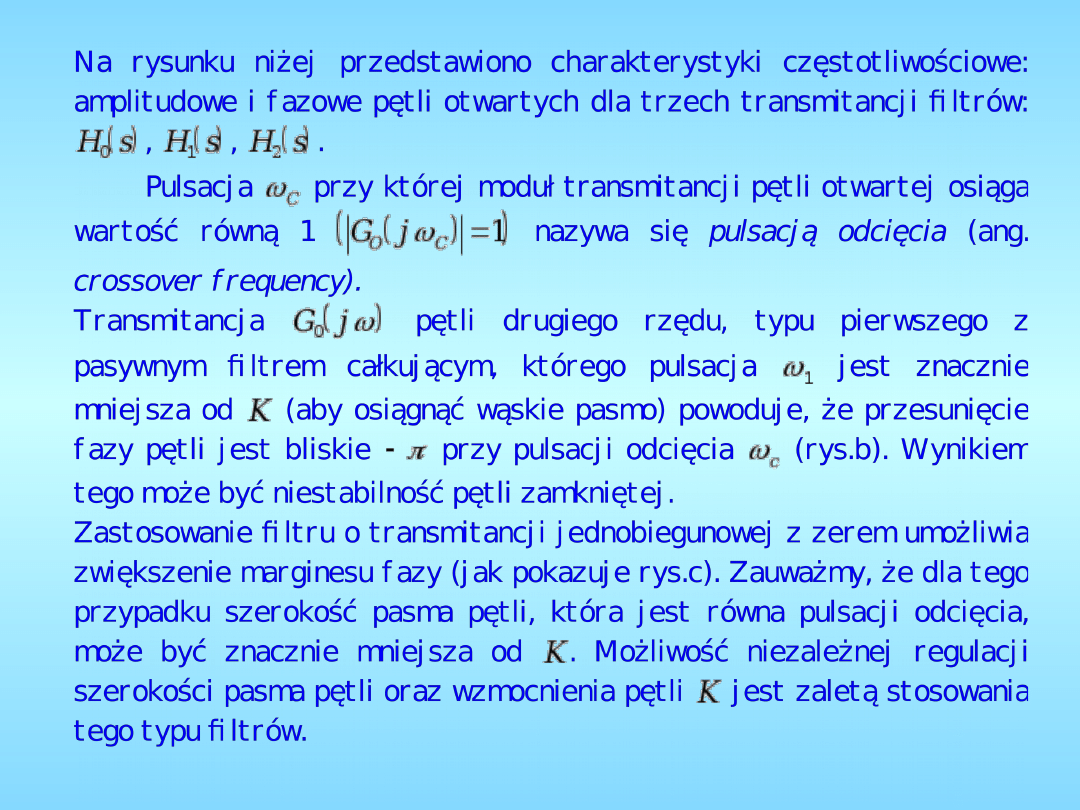
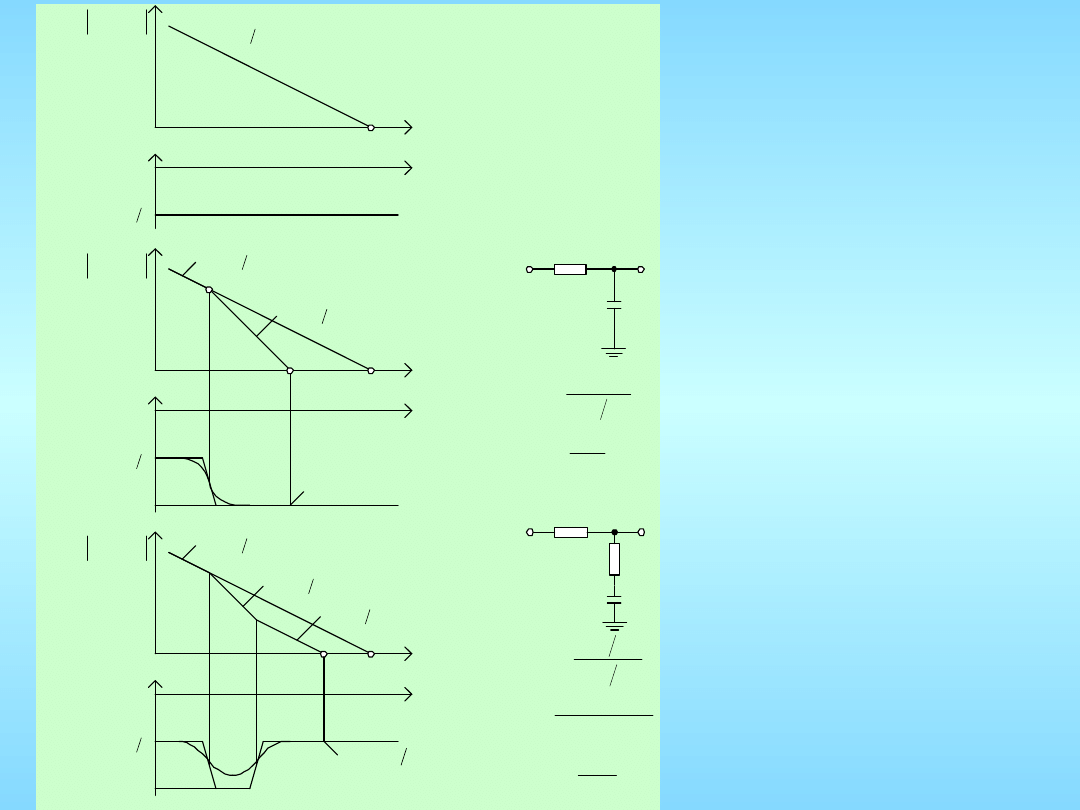
Wpływ transmitancji filtru na właściwości śledzące
pętli
Zasada działania. Model pętli fazowej
Procesy synchronizacji pętli PLL
Scalone pętle fazowe
Detektor fazy
Generatory przestrajane napięciem - VCO
Przykłady realizacji układu scalonego PLL

Układy z fazową pętlą sprzężenia zwrotnego,
często nazywane pętlami fazowymi PLL (ang.
phase - locked - loop), znajdują bardzo szerokie
zastosowanie we współczesnej elektronice do
synchronizacji, podziału/powielania częstotliwości,
pośredniej demodulacji częstotliwości, przemiany
częstotliwości itp. Ciągle rosnący obszar licznych i
różnorodnych zastosowań pętli fazowej w
układach przetwarzania sygnałów analogowych i
cyfrowych wiąże się z tym, że parametry układów
z pętlą PLL są na ogół korzystniejsze niż
parametry układów konwencjonalnych.
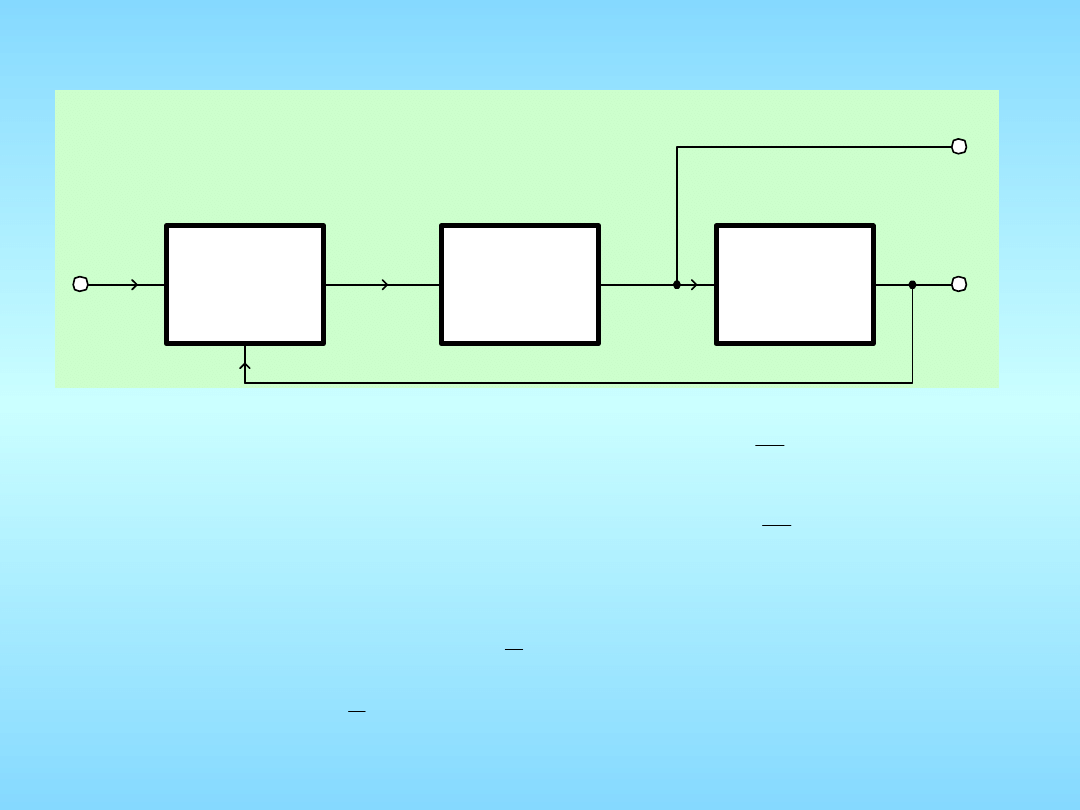
FDP
Detektor
fazy
VCO
u t
i
i
t
u t
D
u t
O
u t
g
u t
O
g
t
rad
V rad
/
V
V V
/
V
rad V
/
rad
Schemat blokowy układu z fazową pętlą
sprzężenia zwrotnego
cos
sin
0
0
t
t
U
t
u
t
t
U
t
u
g
g
g
i
i
i
0
0
t
dt
d
t
t
dt
d
t
g
g
i
i
t
t
U
U
k
t
u
t
u
k
t
u
g
i
g
i
m
g
i
m
D
sin
2
1
t
t
U
U
k
g
i
g
i
m
0
2
sin
2
1
k
m
- jest stała układu mnożącego
b
D
b
b
D
g
i
g
i
m
D
U
t
k
t
t
U
U
k
t
u
sin
u
lub
sin
sin
2
1
max
D
t
t
t
g
i
b
- błąd fazy
g
i
m
D
U
U
k
k
2
1
- wzmocnienie detektora fazy
dt
t
h
t
k
t
h
t
k
t
h
t
u
t
u
b
t
D
b
D
D
O
sin
sin
0
U
Dmax
u
D
U
Dmax
arctg k
D
b
2
2
g
0
arctg k
G
u
G
b)
a)
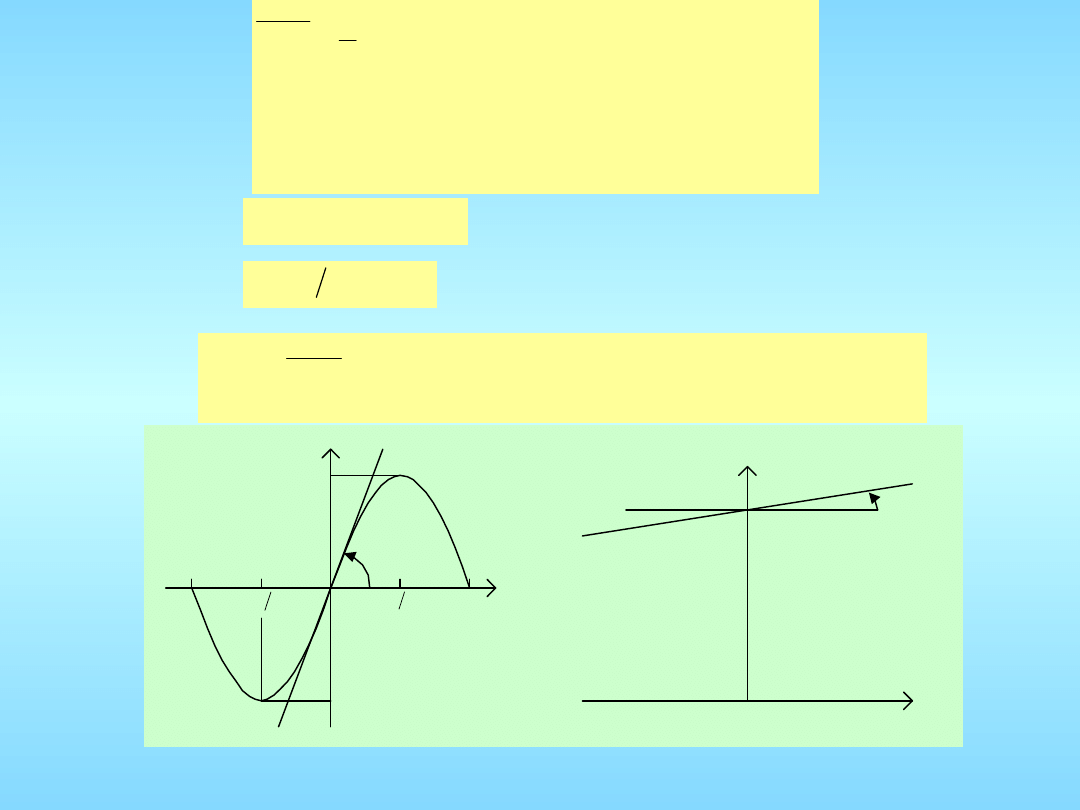
a) Charakterystyka przejściowa detektora fazy, b) charakterystyka przestrajania
generatora VCO
t
u
k
t
O
G
g
0
t
u
k
dt
t
d
O
G
g
t
h
t
t
k
k
t
u
k
dt
t
d
g
i
D
G
O
G
g
sin
)
(
d
t
h
t
t
K
t
h
t
t
K
dt
t
d
g
i
t
g
i
g
]
[
sin
sin
0
d
t
h
t
K
dt
t
d
t
h
t
K
dt
t
d
dt
t
d
b
t
i
b
i
b
0
sin
)
(
)
(
sin
)
(
t
h
t
k
t
h
t
t
k
t
h
t
u
t
u
b
D
g
i
D
D
O
sin
sin
D
G
k
k
K
t
t
t
g
i
b

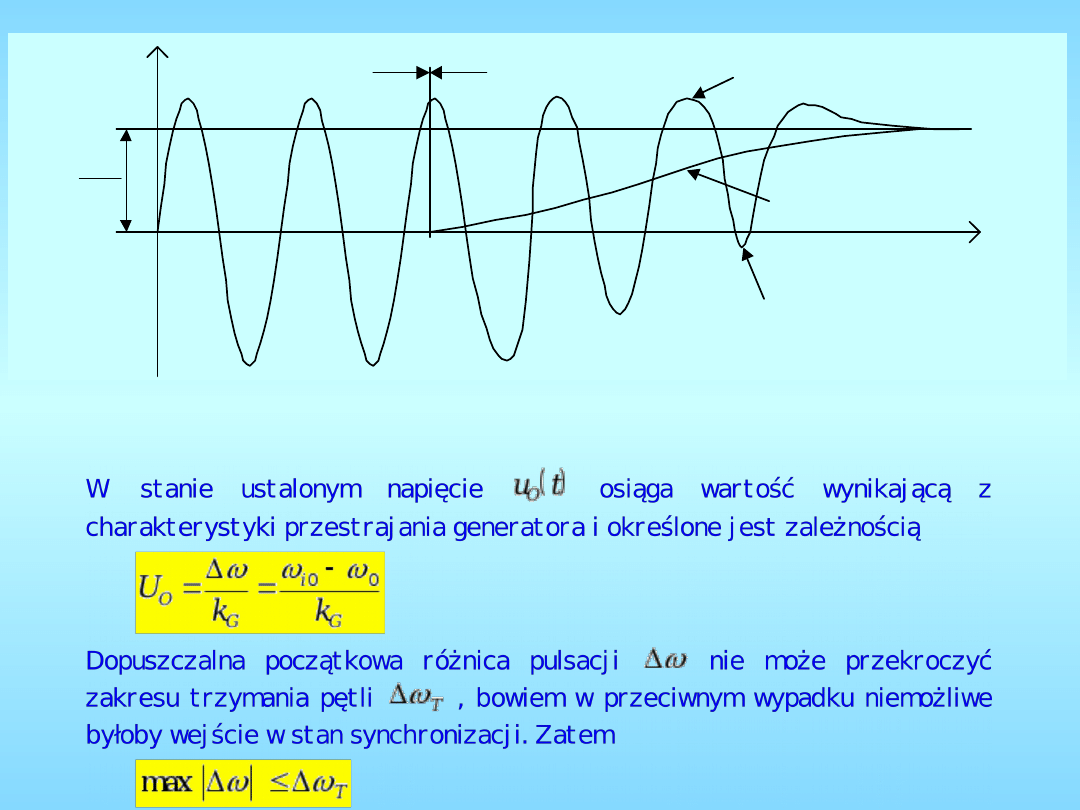
Pętla PLL opisana powyższymi równaniami jest układem
silnie nieliniowym z powodu nieliniowości charakterystyki
przejściowej detektora fazy. Nachylenie charakterystyki
przejściowej detektora fazy (w przypadku zastosowania
układu mnożącego) ulega nie tylko znacznym zmianom
co do wartości, lecz również zmienia swój znak przy
zmianie błędu fazy od (rys.a).
Przy zmianach błędu fazy w przedziałach:
nachylenie charakterystyki jest dodatnie
i w tym przypadku w pętli występuje fazowe ujemne
sprzężenie zwrotne. Dla pozostałych nachylenie
charakterystyki przejściowej detektora jest ujemne i w
pętli występuje fazowe dodatnie sprzężenie zwrotne.
b
b
do
b
n
2
2
2
do
dla n1 2
, ,
b
t
t
g
i
const
=
b0
t
t
g
i
const
:
posiada
i
i
t
u
0
0
0
sin
sin
2
1
b
D
b
g
s
m
D
D
k
U
U
k
t
u
U
D
D
D
k
U
k
0
PĘTLA W STANIE SYNCHRONIZACJI
Liniowy model pętli fazowej
0
0
0
0
k k H
k k H
G
D
g
G
D
t
u
k
t
O
G
g
0
t
h
t
k
t
h
t
u
t
u
b
D
D
O
sin
T
G
D
k k H
K
0
t
h
t
K
dt
t
d
dt
t
d
t
h
t
t
K
dt
t
d
b
i
b
g
i
g
s
H
s
K
s
s
s
s
s
H
s
s
K
s
s
b
i
b
g
i
g
s
H
K
s
s
H
K
s
s
s
G
i
g
s
H
K
s
s
s
G
s
s
s
G
i
b
b
1
s
k
s
U
s
G
O
g
s
s
H
K
s
s
H
k
k
s
s
s
G
G
D
O
i
g
O
t
u
k
dt
t
d
O
G
g
H s
k
D
k
G
i
s
U s
D
U s
O
g
s
U s
O
V rad
/
V V
/
rad Vs
/
b
s
Faza
1 s
Pulsacja
g
s
g
s
g
s
VCO
Filtr
Detektor fazy
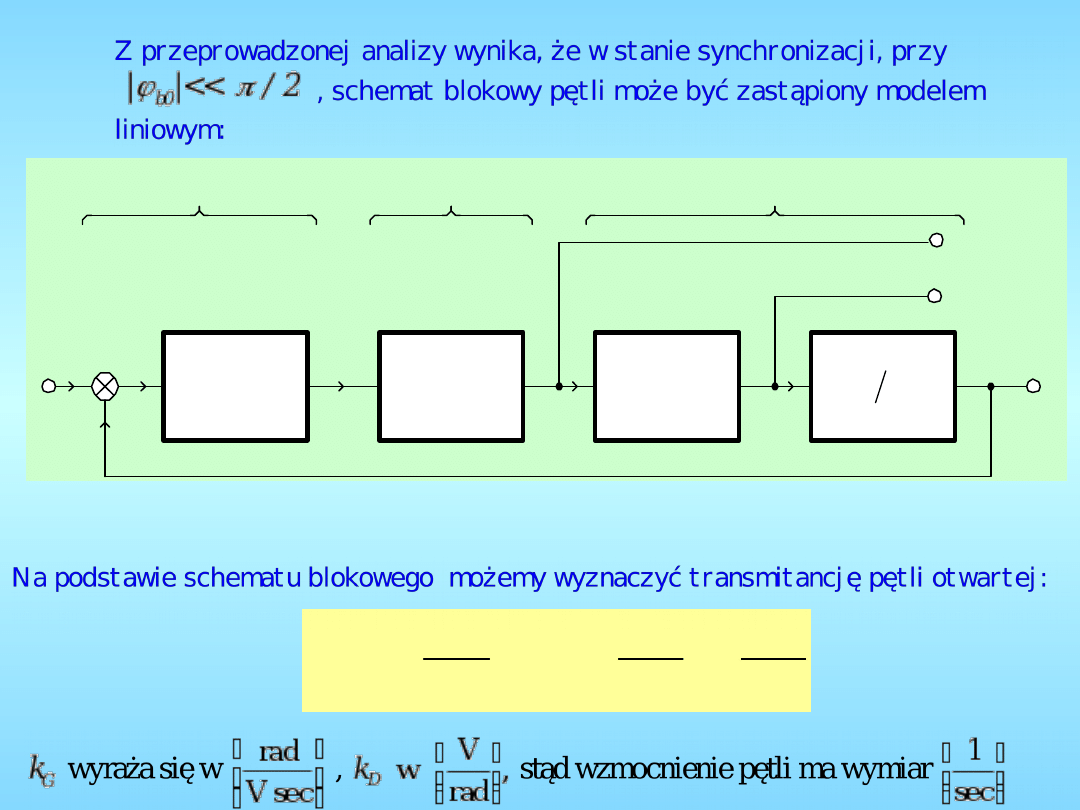
Liniowy model pętli fazowej w stanie
synchronizacji
s
s
H
K
s
s
H
k
k
s
s
s
G
G
D
O
i
g
O

Wpływ transmitancji filtru na właściwości
śledzące pętli
W literaturze pętle fazowe klasyfikuje się jak układy
automatycznej regulacji w oparciu o transmitancje pętli
otwarte, przy czym liczba biegunów określa rząd pętli,
natomiast liczba biegunów w początku układu
współrzędnych określa typ pętli.
Najczęściej rozważa się pętle fazowe 1-go rzędu (bez
filtru) oraz pętle 2-go rzędu z typowymi pasywnymi lub
aktywnymi filtrami 1-go rzędu. Dokonując tej
klasyfikacji, niżej przedstawiono najbardziej typowe
transmitancje stosowanych filtrów i wiążące się z nimi
transmitancje pętli:
pętla pierwszego rzędu, typu pierwszego:
1
0
s
H
K
s
K
s
G
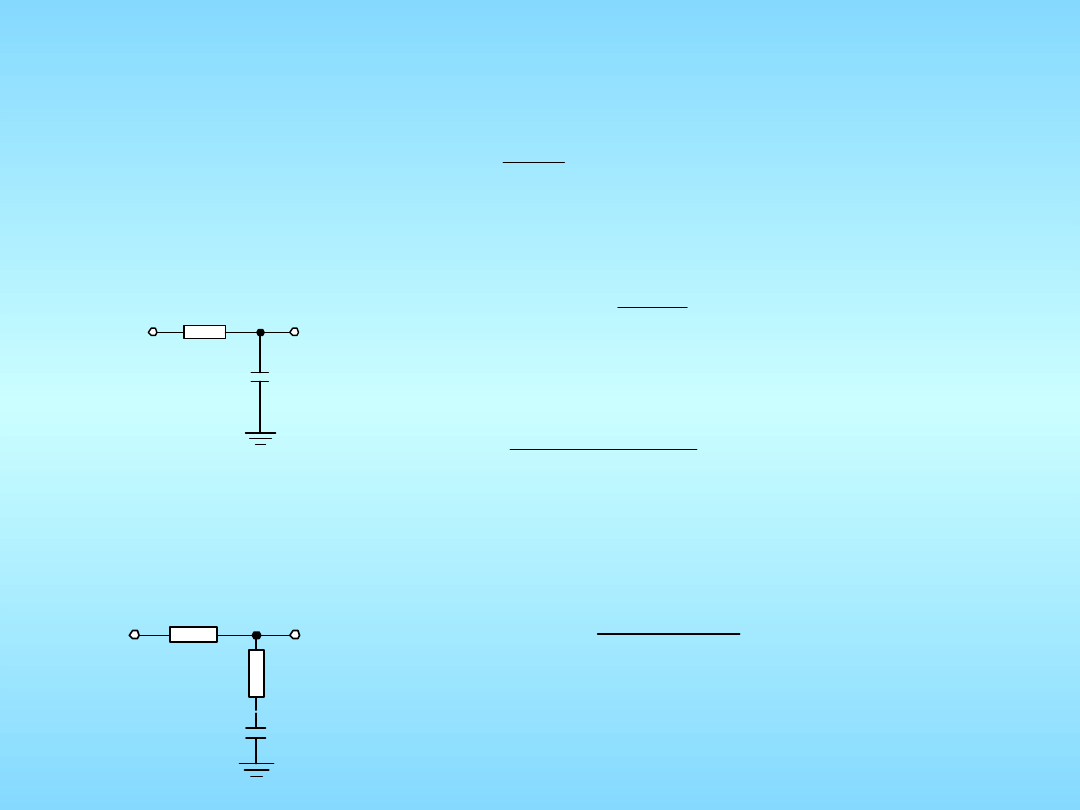
pętla drugiego rzędu, typu pierwszego z pasywnym filtrem całkującym:
R
1
C
s
s
H
s
H
1
1
1
1
C
R
1
1
1
1
1
1
2
1
1
K
s
s
K
s
G
pętla drugiego rzędu, typu pierwszego z pasywnym filtrem proporcjonalno – całkującym:
R
1
R
2
C
s
s
s
H
s
H
)
(
1
1
2
1
2
2
C
R
C
R
2
2
1
1
2
1
2
1
2
2
1
2
1
2
1
)
(
)
1
(
K
s
K
s
s
K
s
G
2
2
2
2
2
n
n
n
n
n
s
s
s
K
s
G
2
/
1
2
1
K
n
- pulsacja drgań
swobodnych pętli
K
K
K
2
2
/
1
2
1
1
2
1
- współczynnik
tłumienia
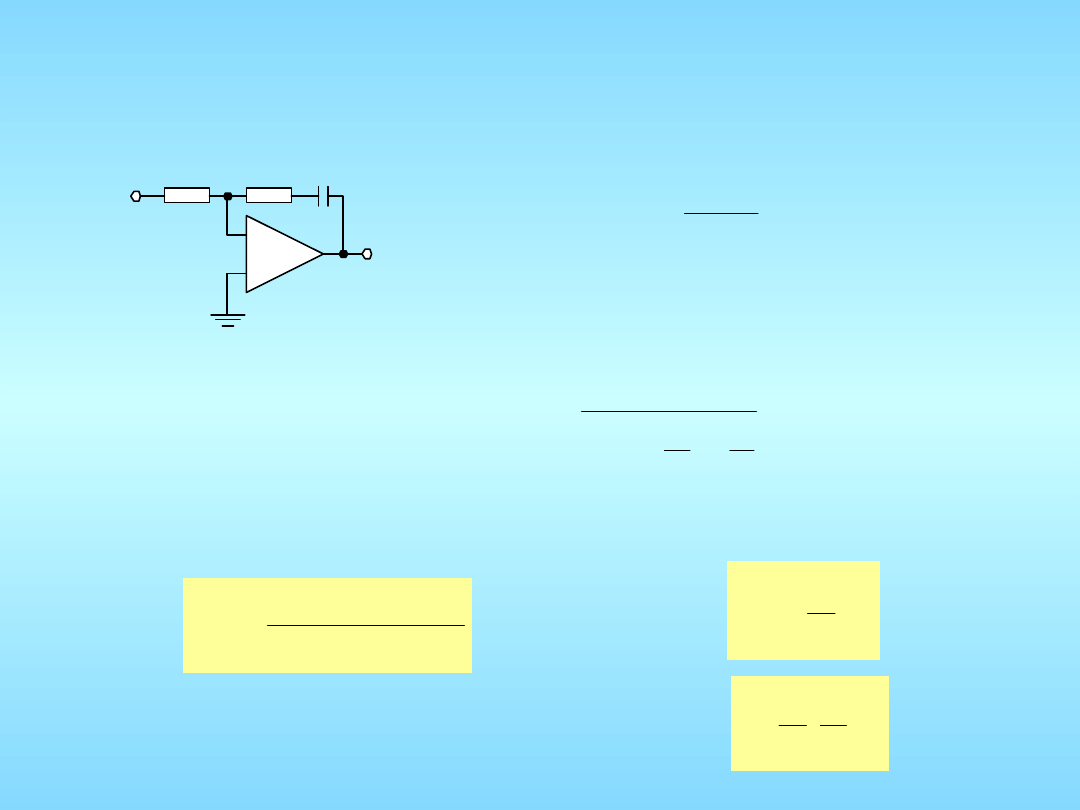
pętla drugiego rzędu, typu drugiego z aktywnym filtrem
proporcjonalno – całkującym:
R
1
R
2
C
s
s
s
H
s
H
1
2
3
1
C
R
C
R
2
2
1
1
1
1
2
2
1
1
2
1
K
s
K
s
s
K
s
G
Lub w postaci unormowanej:
2
2
2
2
2
n
n
n
n
s
s
s
s
G
2
/
1
1
K
n
2
/
1
1
2
2
K
gdzie:
c
K
G j
O
2
a)
argG j
O
1
0
c
G j
O
2
b)
argG j
O
1
0
1
K
20dB dek
20dB dek
40dB dek
1
K
0
H s
0
1
1
1
1
RC
c
0
1
K
20dB dek
40dB dek
2
20dB dek
2
1
G j
O
argG j
O
2
H s
s
s
2
2
1
1
1
1
1
2
1
R R C
H s
s
1
1
1
1
2
2
1
R C
c)
R
1
R
2
C
R
1
C
wpływ członu
całkującego VCO
Charakterystyki częstotli-
wościowe: amplitudowe i
fazowe
otwartych pętli fazowych
dla
różnych transmitancji
filtru:
a) H
0
(s), b) H
1
(s), c) H
2
(s)
i
Hz
2 250
i
kHz
2 1
i
kHz
2 1
i
Hz
2 500
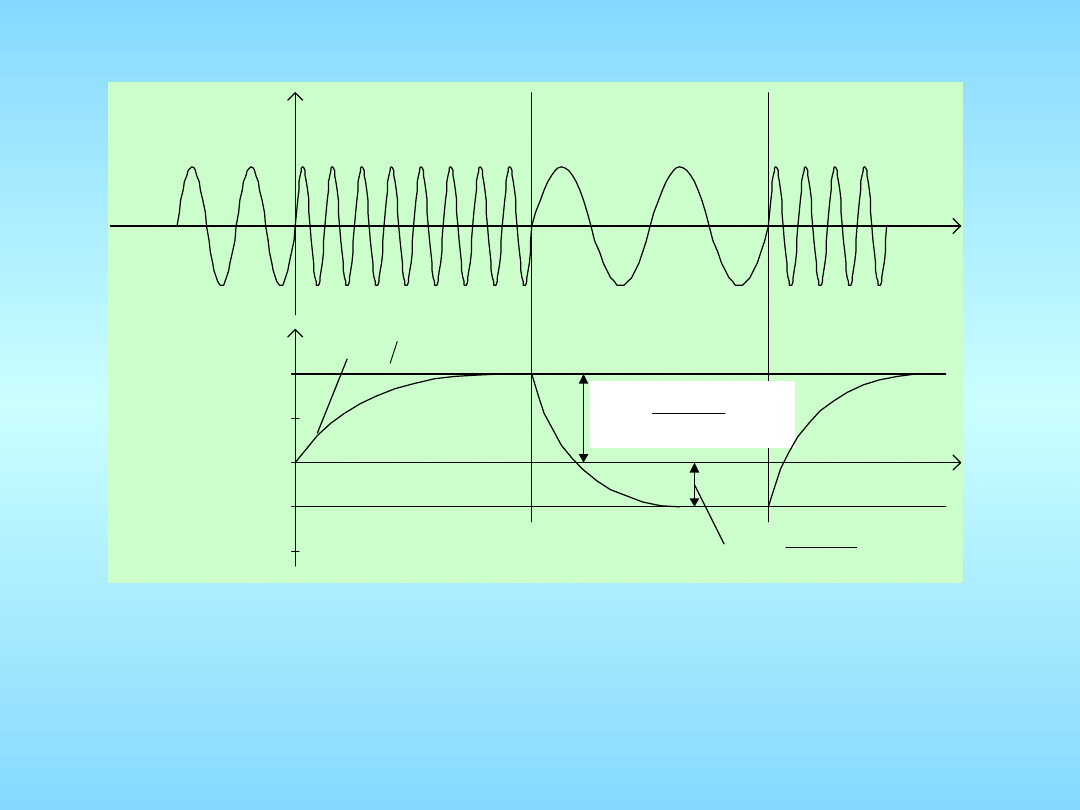
u t
i
( )
u t
O
( )
05
.
05
.
025
.
025
.
0
t
t
1
2
k
ms
U
k
V
O
i
G
1
0
05
,
U
k
V
O
i
G
2
0
025
,
Odpowiedź pętli fazowej pierwszego rzędu na sinusoidalny
sygnał wejściowy ze
skokową zmianą częstotliwości

Zdolność śledzenia przez pętlę zmian fazy sygnału
wejściowego określa się zwykle dla standardowych
zaburzeń tego sygnału o postaci:
- skokowej zmiany fazy,
- skokowej zmiany częstotliwości,
- liniowej zmiany częstotliwości.
Przyjmując, że zaburzenie sygnału wejściowego nastąpiło w
chwili , wymienione trzy sygnały standardowe i ich
transformaty Laplace’a przedstawiono w tabeli 1.
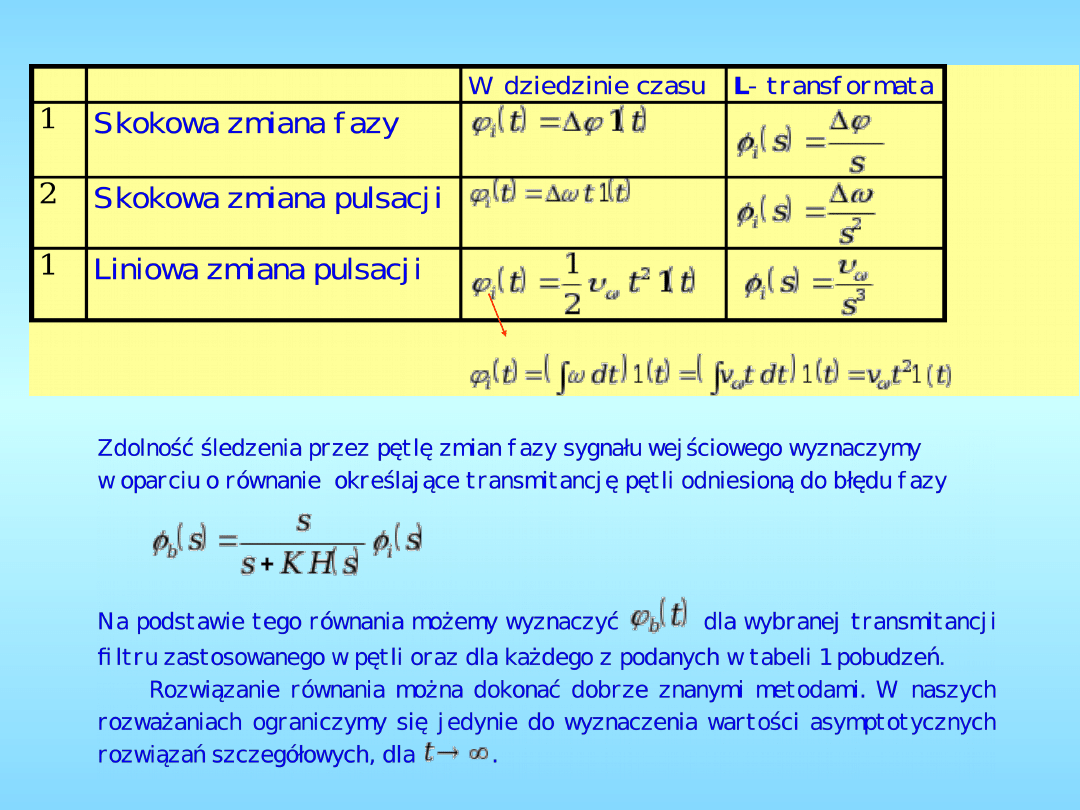
TABELA 1
s
s
H
K
s
s
s
s
t
i
s
b
s
b
b
t
2
0
0
0
lim
lim
lim
skokowa zmiana
fazy:
0
lim
lim
2
0
0
s
s
H
K
s
s
t
s
b
b
t
skokowa zmiana
pulsacji:
0
lim
lim
2
2
0
0
H
K
s
s
H
K
s
s
t
s
b
b
t
K
t
b
b
t
0
lim
1
0
H
liniowa zmiana pulsacji:
3
2
0
lim
lim
s
s
H
K
s
s
t
s
b
t
K
s
s
H
K
s
s
s
s
s
s
dt
t
d
s
b
s
b
t
3
2
0
0
lim
lim
lim
1
0
H
Błąd fazy narasta nieograniczenie z szybkością:
Błąd fazy narasta w miarę upływu czasu, powodując wyjście
detektora fazy z liniowego obszaru pracy, aż przy pewnej wartości
błędu fazy następuje utrata synchronizacji.
liniowa zmiana pulsacji:
3
3
2
0
0
lim
lim
s
s
H
K
s
s
t
t
s
b
b
t
2
2
2
2
0
0
2
lim
n
n
n
s
b
s
s
Dla wystarczająco dużego współczynnika tłumienia
przebieg osiąga wartość asymptotyczną w sposób
aperiodyczny, tj. bez oscylacji o dużych amplitudach i
przy dostatecznie małym stosunku pętla pozostaje w
stanie synchronizacji.
0
2
df
j
j
B
i
g
n
Pasmo szumowe
0
sin
0
i
i
i
i
t
U
t
u
0
cos
cos
0
0
0
g
g
t
g
g
g
t
U
t
t
U
t
u
0
0
i
t
t
U
t
u
i
i
i
0
sin
0
i
i
t
t
PROCESY SYNCHRONIZACJI PĘTLI PLL
Dochodzenie do stanu synchronizacji - zakres
chwytania
u
O
t
U
k
O
G
0
0'
pętla otwarta
proces chwytania
częstotliwości zbliżone
częstotliwości oddalone
składowa wolnozmienna
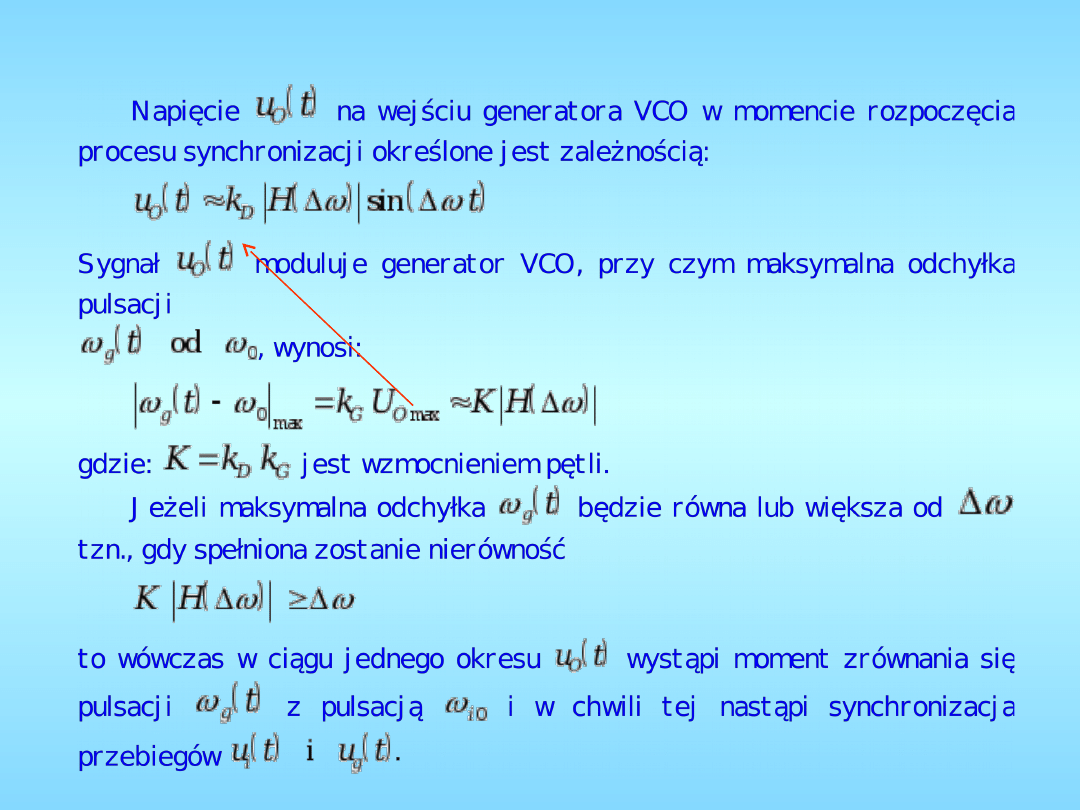
Napięcie u
o
(t) na wejściu generatora VCO pętli osiągającej
stan synchronizacji
u
O
i
1 k
G
2
C
2
T
0
c
G
k
P
4
P
1
P
0
P
3
P
2
0
0
c
G
k
nachylenie
zakres chwytania
zakres trzymania
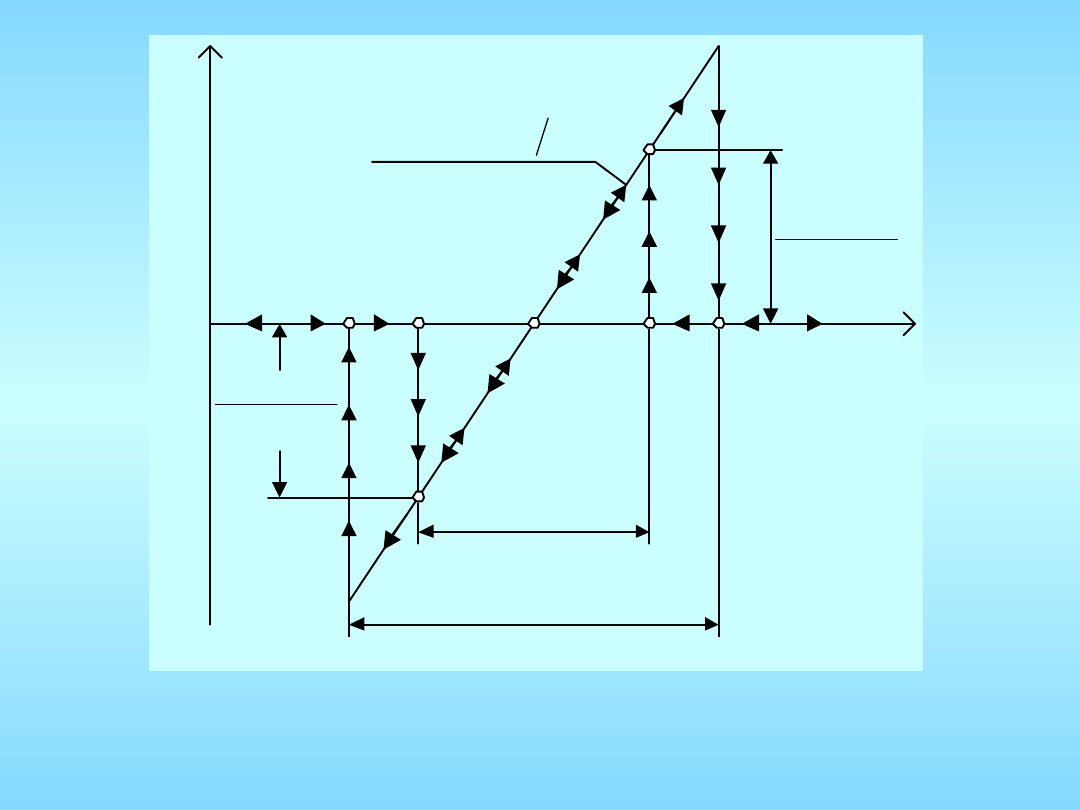
Zakresy chwytania i trzymania pętli
fazowej
Proces synchronizacji pętli pierwszego
rzędu
t
K
dt
t
d
b
b
sin
P
2
3
i0
0
2
0
P
1
2
3
4
P
3
P
4
2
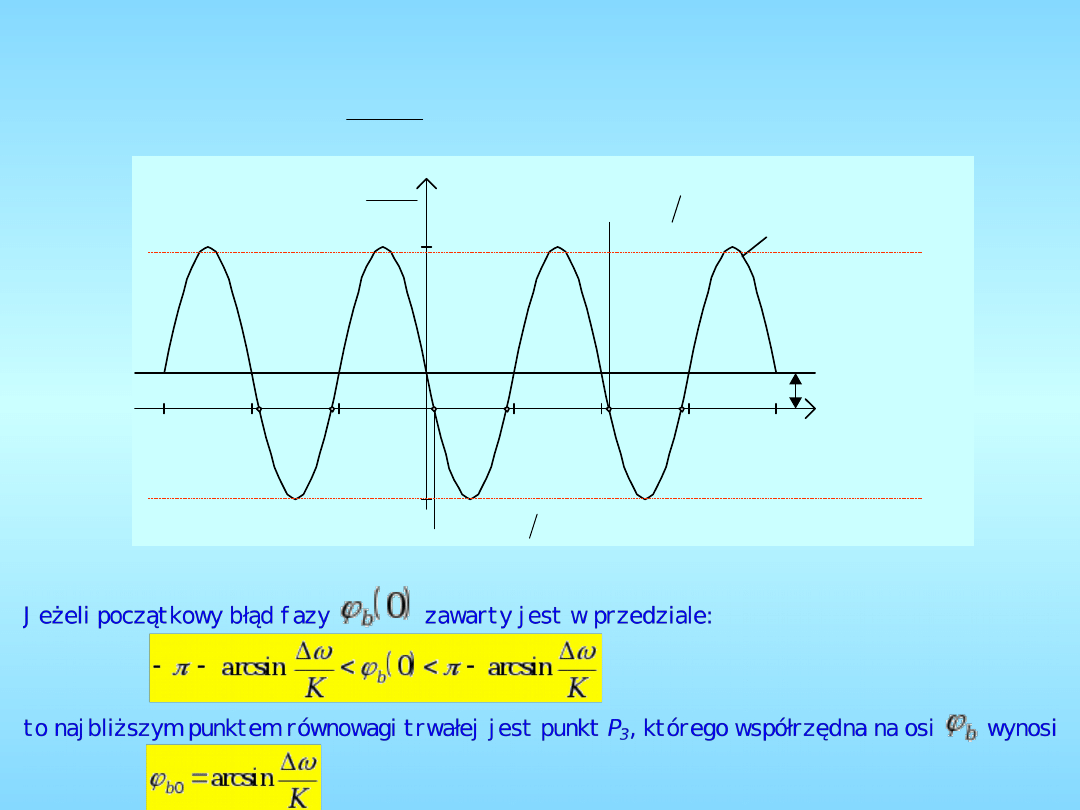
arcsin K
K
K
b
sin
K
arcsin
K
b
d
dt
b
P
5
P
6
Odwzorowanie równania na
płaszczyźnie fazowej
t
K
dt
t
d
b
b
sin
Proces synchronizacji pętli drugiego
rzędu
s
s
s
H
2
1
2
2
1
1
2
1
2
1
2
1
2
2
2
sin
cos
1
t
K
dt
t
d
t
K
dt
t
d
b
b
b
b
K
t
dt
t
d
t
dt
t
d
n
b
n
b
b
n
b
2
2
2
2
sin
cos
2
Jeżeli:
to:
,
/
1
2
K
Bardzo często w pętli fazowej drugiego rzędu stosowany jest
dolnoprzepustowy filtr proporcjonalno - całkujący o
transmitancji
Proces synchronizacji pętli drugiego
rzędu cd.
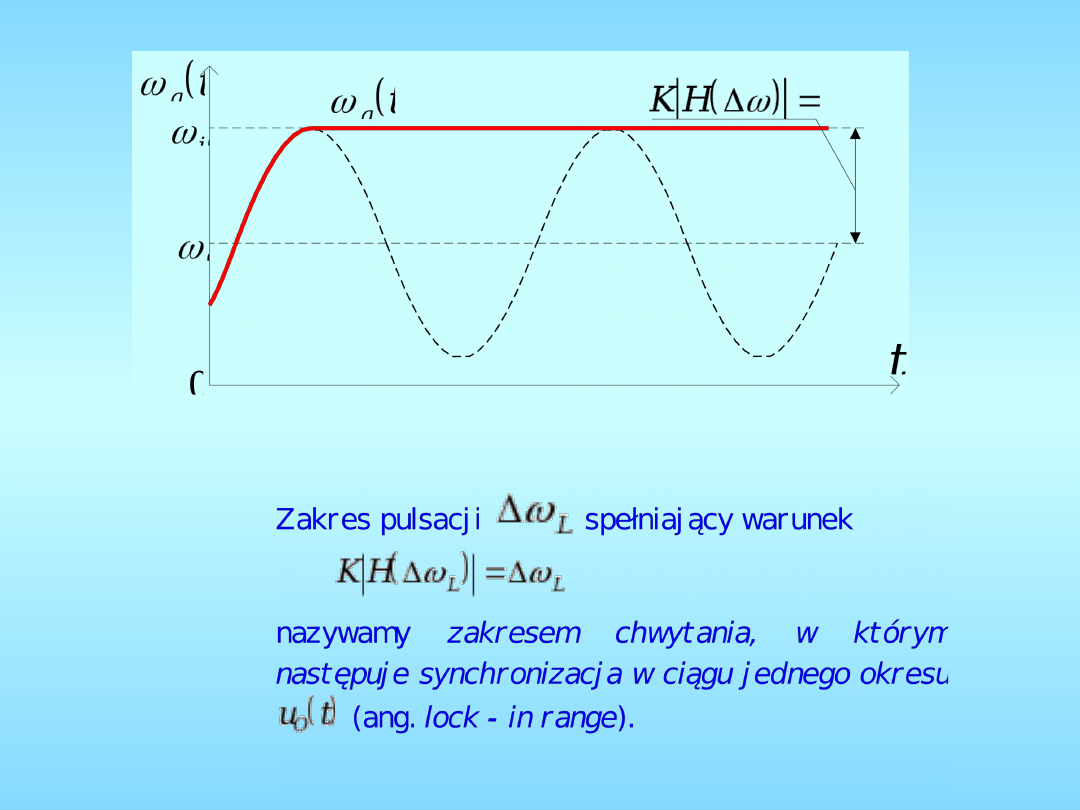
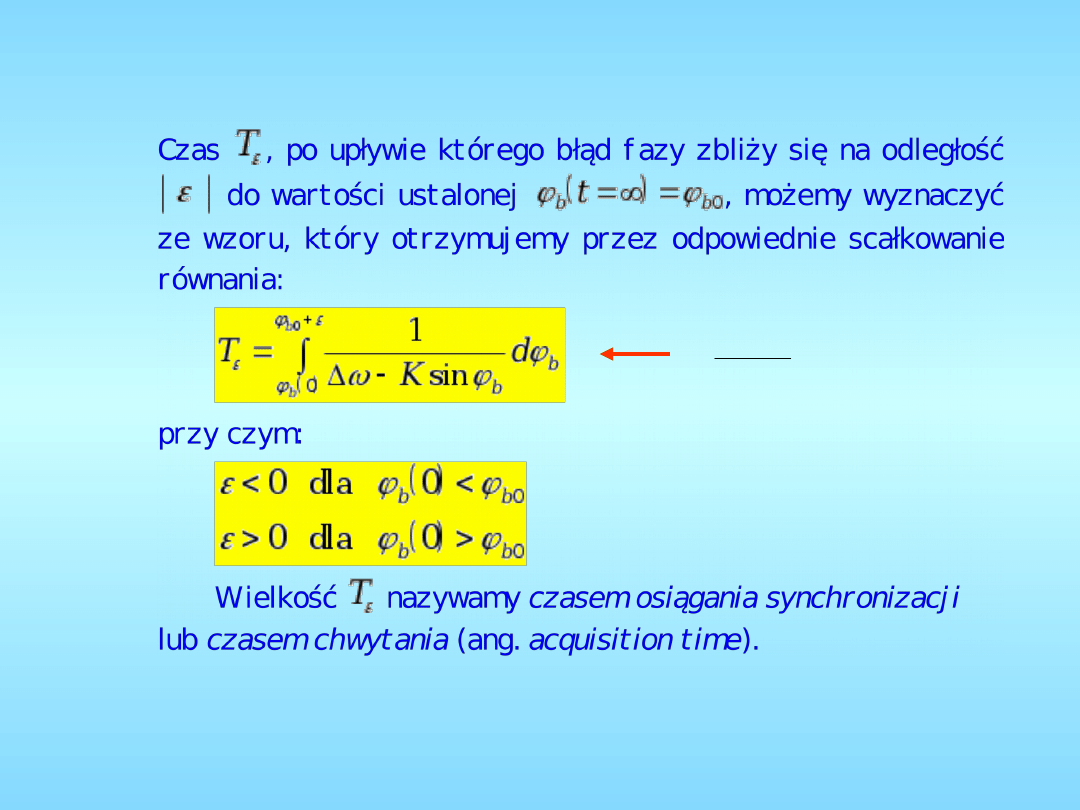
Osiąganie stanu synchronizacji w ciągu jednego
okresu
L
L
H
K
n
L
n
L
2
n
L
t
/
1
przy zastosowaniu filtru o transmitancji:
H s
1
w przypadku filtru o transmitancji:
H s
2
W obu przypadkach stan synchronizacji osiąga się po
czasie:
0
0
0
i
r
t
t
t
H
k
t
u
r
r
D
O
sin
u
O
t
t
r
r
a)
b)
i0
0
r
i
g
t
t
0
małe (cz. zbliżone - filtr nie tłumi)
duże
(cz. oddalone - filtr tłumi)
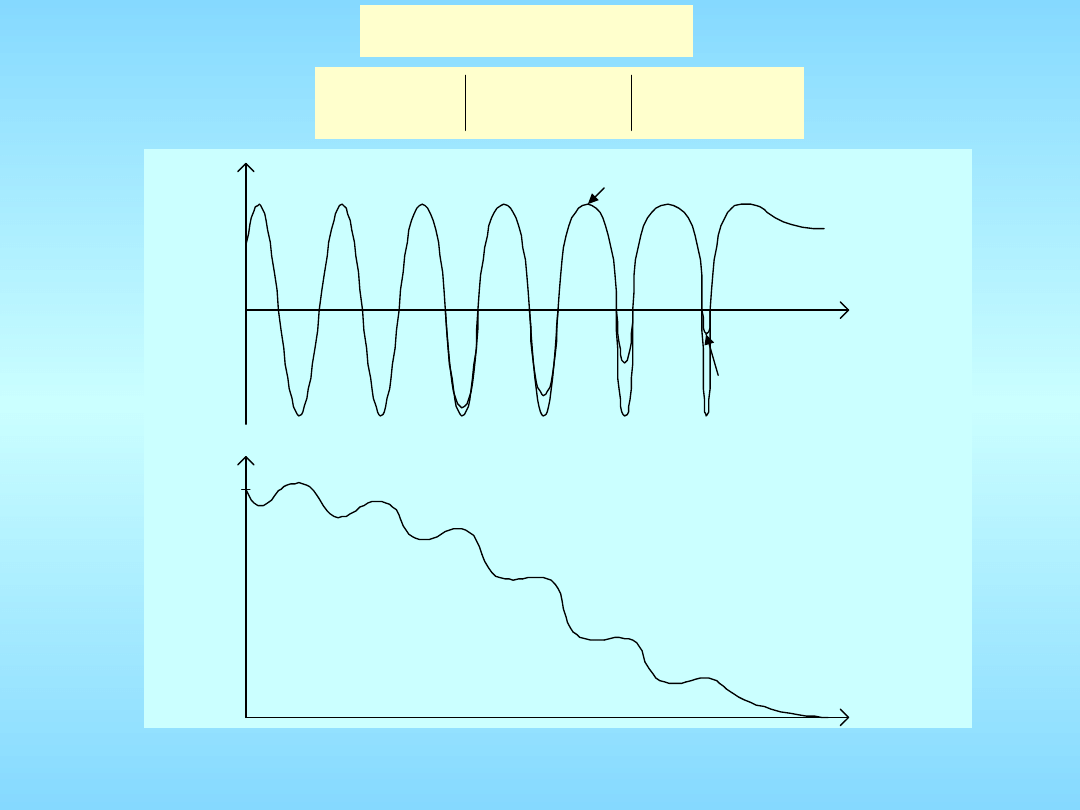
Proces synchronizacji pętli fazowej: a) przebieg napięcia u
o
(t), b) przebieg
różnicy pulsacji
r
(t)=
i0
-
g
(t)
2
8
n
n
C
K
2
2
2
n
C
t
Dla pętli drugiego rzędu zakres chwytania
wynosi:
Czas trwania procesu synchronizacji określony jest
zależnością:
U
EE
T
4
T
3
T
5
T
6
T
2
T
1
u t
i
u t
g
I
EE
U
CC
R
C
R
C
u t
d
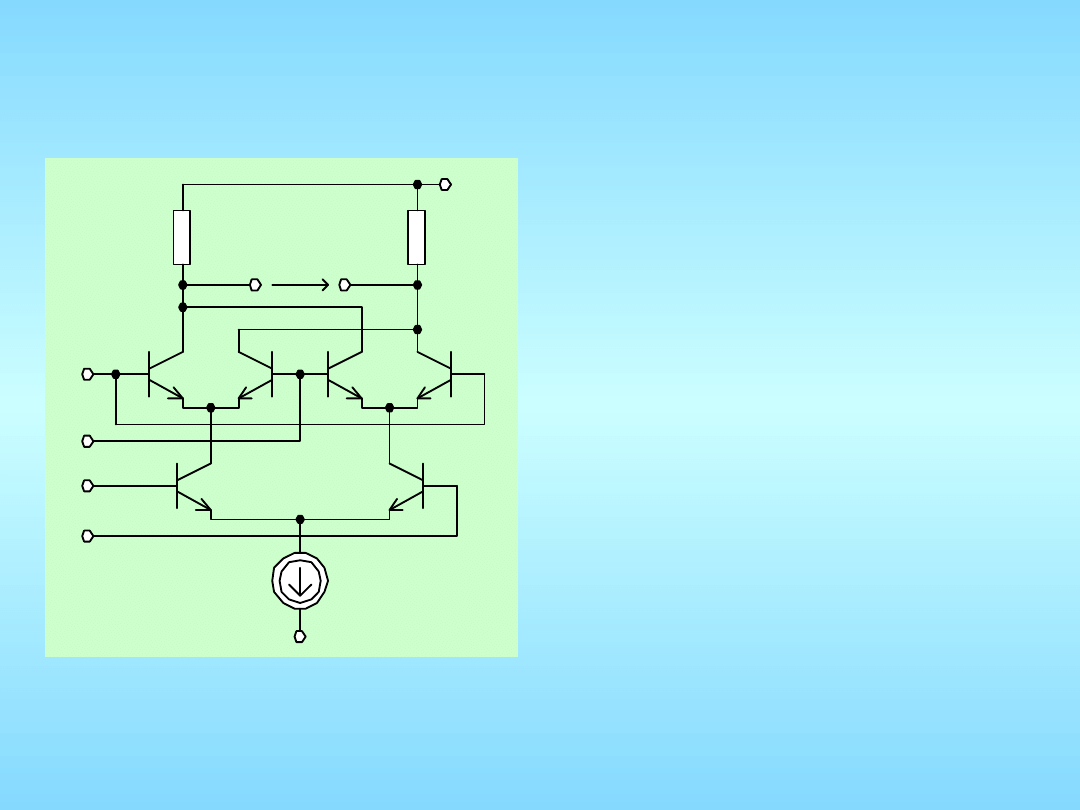
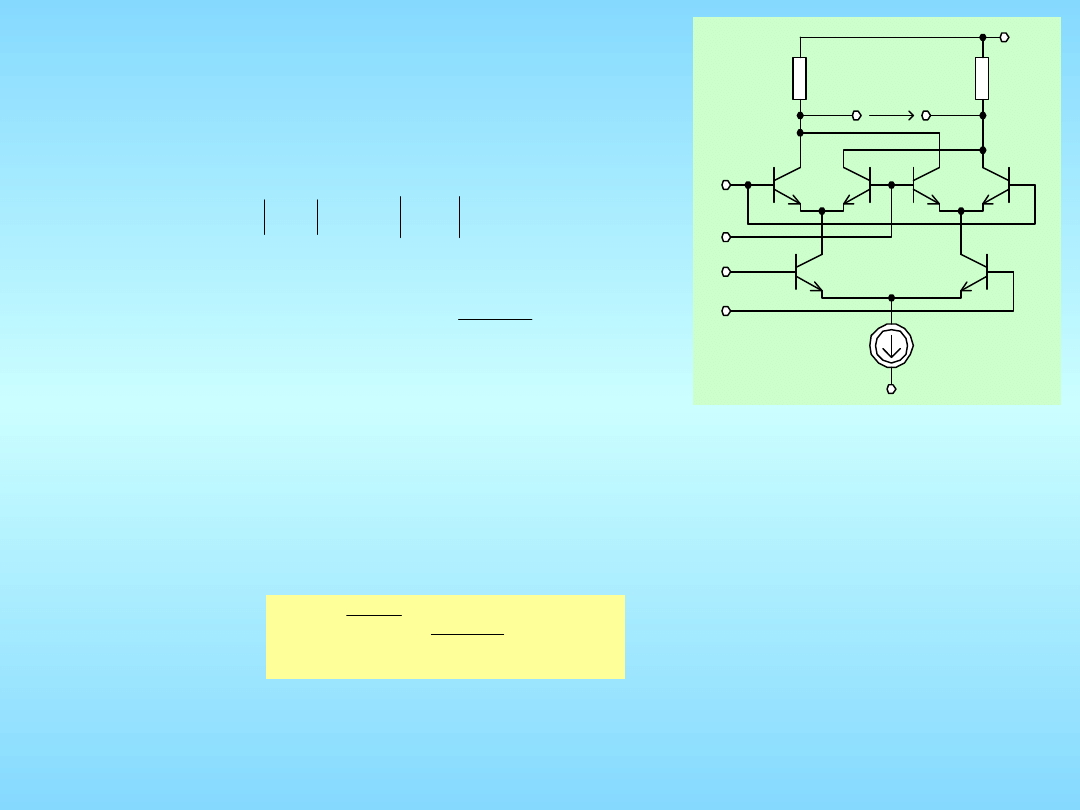
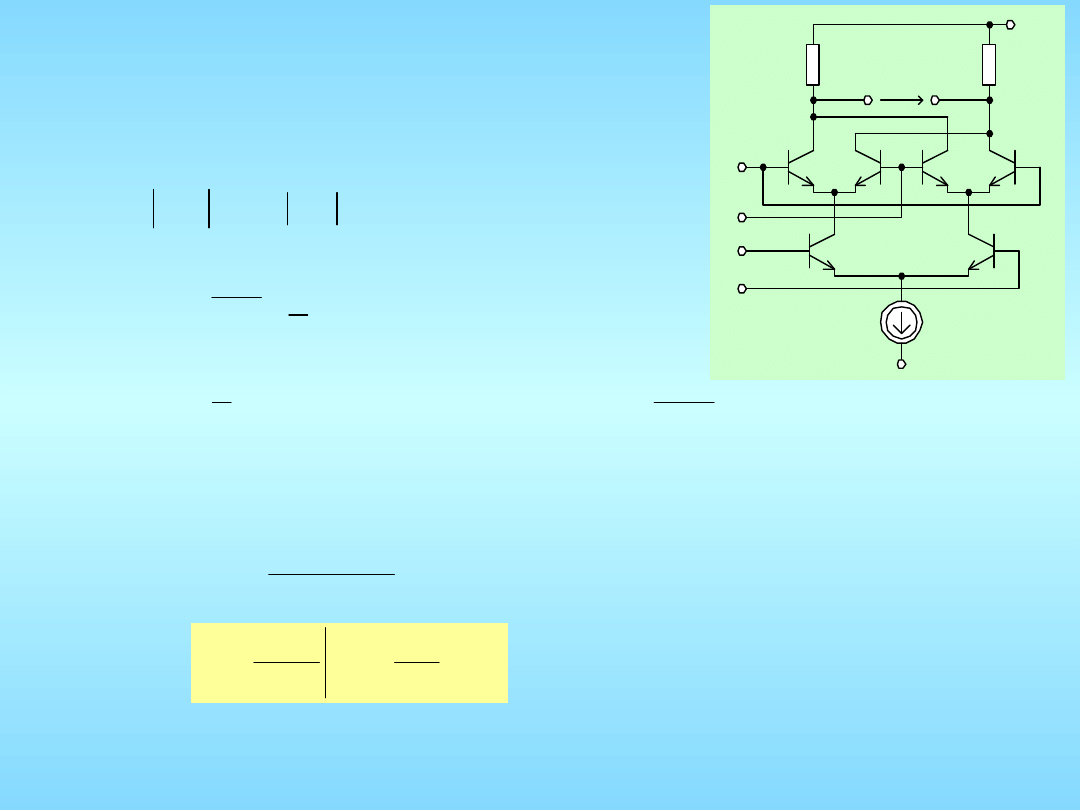
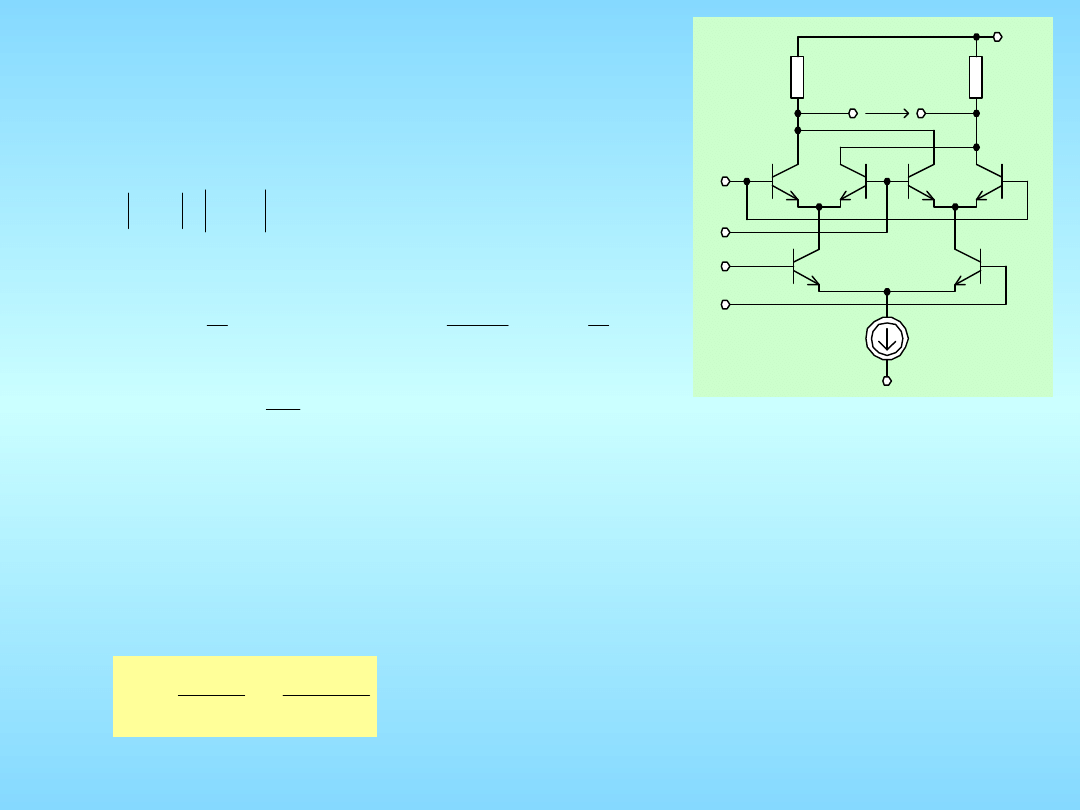
Rys. 4.11. Schemat ideowy modulatora
zrównoważonego
t
u
t
u
t
u
t
u
g
Y
i
X
,
DETEKTOR FAZY
SCALONE PĘTLE FAZOWE
T
g
T
i
t
u
t
u
;
t
u
t
u
R
I
R
t
i
t
u
g
i
T
C
EE
C
R
D
2
4
t
U
t
u
t
U
t
u
g
g
i
i
0
0
cos
cos
cos
8
2
0
i
g
T
C
EE
D
D
U
U
R
I
t
u
U
Przypade
k 1
U
EE
T
4
T
3
T
5
T
6
T
2
T
1
u t
i
u t
g
I
EE
U
CC
R
C
R
C
u t
d
i
C
m
Dm
U
R
g
U
cos
2
0
i
C
m
D
U
R
g
U
C
m
i
D
D
R
g
U
d
dU
k
2
max
0
Przypadek 2
T
i
T
g
t
u
t
u
2
;
2
cos
2
sin
sin
1
1
0
0
0
Dm
Dm
Dm
D
D
D
U
t
d
t
U
t
d
t
U
t
d
t
u
t
u
U
U
EE
T
4
T
3
T
5
T
6
T
2
T
1
u t
i
u t
g
I
EE
U
CC
R
C
R
C
u t
d
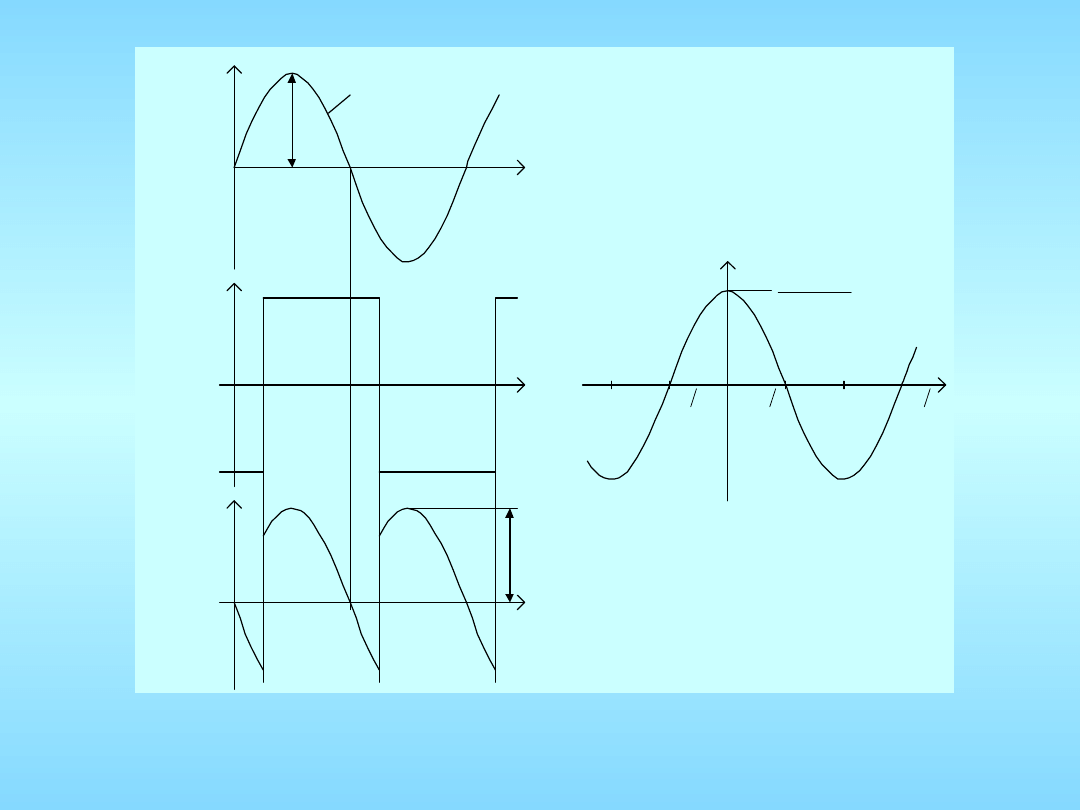
U
D0
2
b)
u t
i
t
a)
u t
g
t
u t
D
t
2
U
Dm
2
U
i
U
t
i
i
sin
0
2
3 2
2g R U
m C
i
0
0
0
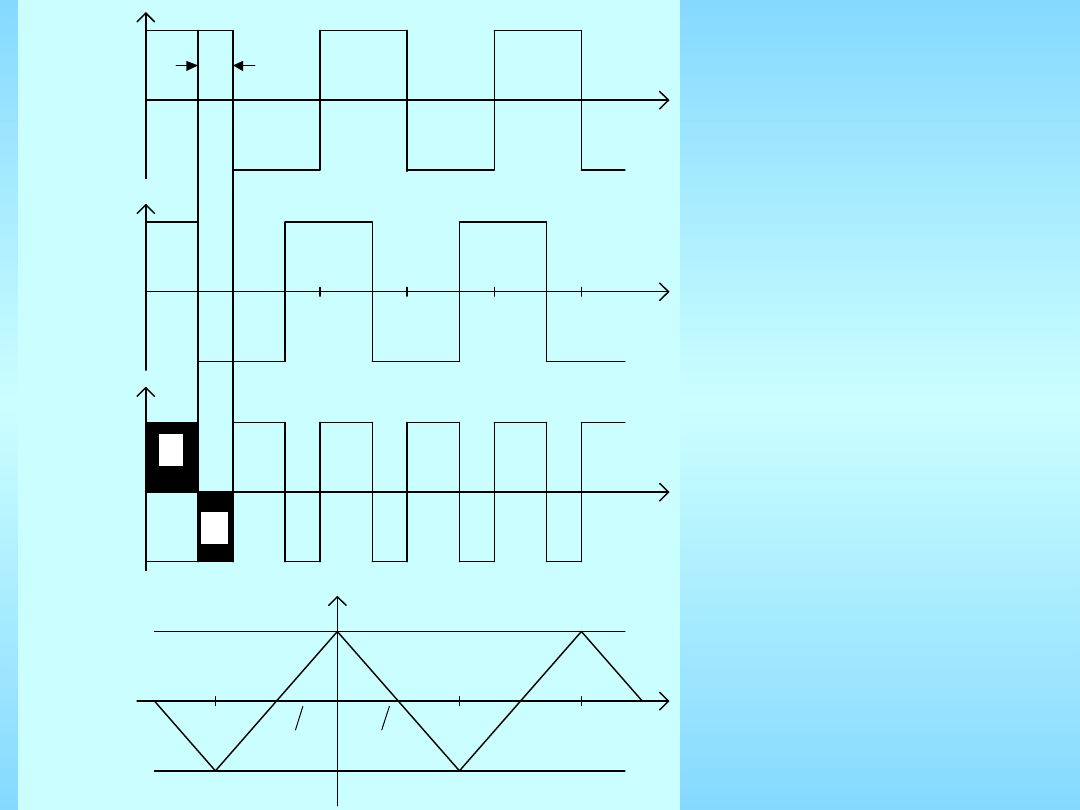
Modulator zrównoważony sterowany sygnałem sinusoidalnym i synchronizowany
przebiegiem prostokątnym: a) przebiegi czasowe, b) charakterystyki detektora
Przypadek
3
T
g
i
t
u
t
u
2
,
2
1
1
0
0
C
EE
C
EE
C
EE
D
D
R
I
R
I
R
I
t
d
t
u
U
C
EE
D
D
R
I
d
dU
k
2
0
U
EE
T
4
T
3
T
5
T
6
T
2
T
1
u t
i
u t
g
I
EE
U
CC
R
C
R
C
u t
d
a)
u t
g
t
2
0
3
4
5
u t
i
t
2
0
3
4
5
u t
D
t
2
0
3
4
5
S
1
S
2
I R
EE
C
I R
EE C
I R
EE C
I R
EE
C
U
D0
2
2
2
b)
Modulator zrównowa-
żony dla dużych amplitud
sygnałów wejściowych:
a) prostokątne sygnały sterujące,
b) charakterystyka detektora
C
R
1
R
2
komp
u
1
2
u
REG
u
REG
u
C
U
P2
U
P1
u
C
U
K1
U
K2
u
T 4 T 2
3 4
T
T
t
t
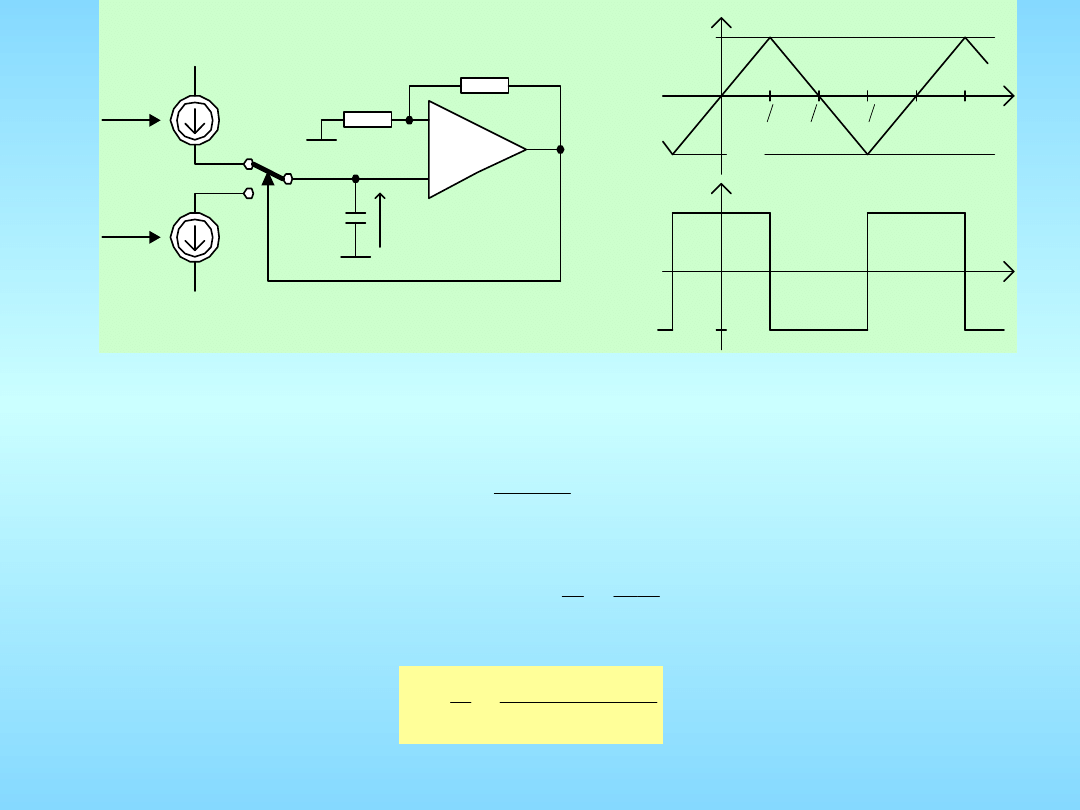
VCO typu integrator - przerzutnik
2
,
1
2
1
1
2
,
1
k
p
U
R
R
R
U
2
2
tg
2
1
T
C
I
T
U
U
P
P
2
1
2
1
P
P
U
U
C
I
T
f
u
C1
R
E
u
REG
T
6
T
5
R
E
I
E
I
E
T
1
T
3
T
4
T
2
C
R
C
D
2
D
1
R
C
DZ
U
CC
U
CC1
u
C2
u
E2
u
E1
I
I
u
C2
u
E2
u
E1
u
C1
T 2
T 2
2U
BEP
2U
BEP
~
I C
I C
2U
BEP
U
CC1
U
CC1
t
t
t
t
U
CC1
U
CC1
U
F
U
F
a)
b)
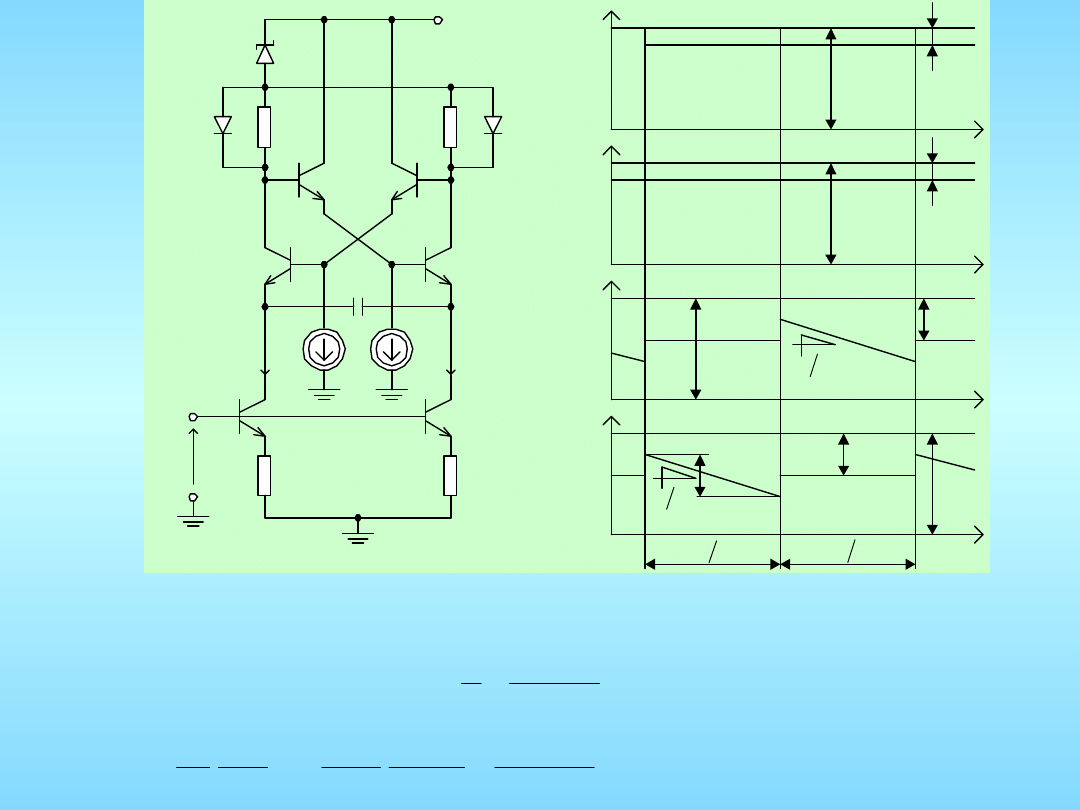
Generator VCO w zmodyfikowanym układzie Bowesa: a) schemat ideowy,
b) idealizowane przebiegi czasowe napięć w układzie
C
U
I
T
f
BEP
4
1
C
/
ppm
3300
C
/
1
0033
,
0
mV
600
C
/
mV
2
1
1
o
o
o
0
0
dT
dU
U
dT
d
BEP
BEP
T
1
T
2
T
3
Wyjście
VCO
4
3
T
4
T
11
T
14
T
13
T
24
T
23
T
12
Pojemność
gen VCO
.
5
6
C
0
T
20
T
21
T
22B
T
22A
T
29
Bias
REF
1
1k
1k
16
U
CC
7V
25
. k
6k
6k
24
. k
12
. k
500
24
. k
12
. k
82
. k
7V
8k
8k
T
26
T
27
T
5
D
8
D
9
D
10
D
11
D
3
D
2
D
1
D
4
D
12
D
13
D
6
D
7
74
. k
T
6
T
9
T
8
T
7
2k
2k
4V
53
. k
14V
14V
We
ekt
fazy
det
.
2
15
1k
500
82
. k
82
. k
T
10
T
19
T
25
T
17
T
18
D
5
14
13
9
12
11
10
Deemfaza
Filtr
VCO
Detektor fazy
7
Zakres
przestrajania
12k
075
. mA
20
. mA
Wy
Wejście
ektora
fazy
det
VCO
Ogranicznik
A
Detektor
fazy
Układy
polaryzacji
Wzmacniacz
Filtr
FDP
Wejście
sygnałuu t
i
Wejście
VCO
Wyjście
VCO
Deemfaza
Wyjście
V
C
0
6
5
4
3
1
2
15
11
12
13
14
10
16
9
8
7
Zakres
przestrajania
a)
b)
1k
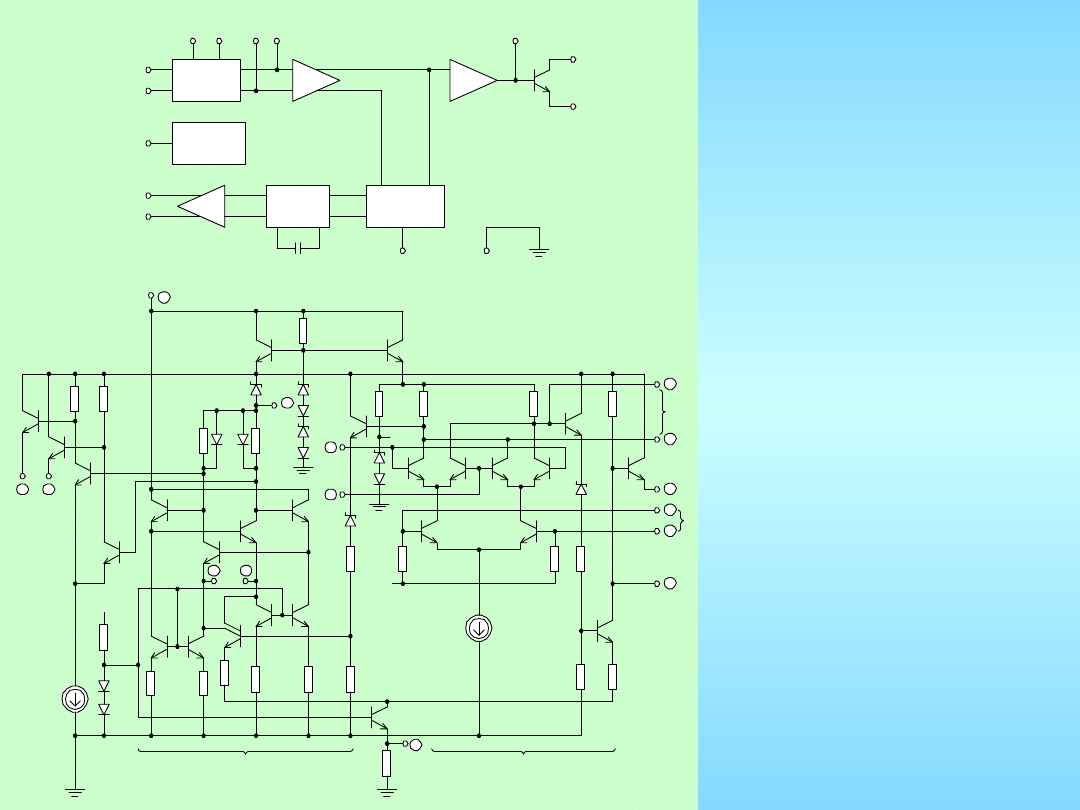
Pętla fazowa typu NE 562
firmy Signetics: a) schemat blokowy,
b) schemat ideowy
A
k
k
K
G
D
C
0
12
VCO
DF
13
15
16
8
2
4
3
U
V
CC
18
25pF
1nF
1nF
15k
Filtr
deemfazy
WY2
WY1
5
6
9
15
14
10nF
100pF
NE 562
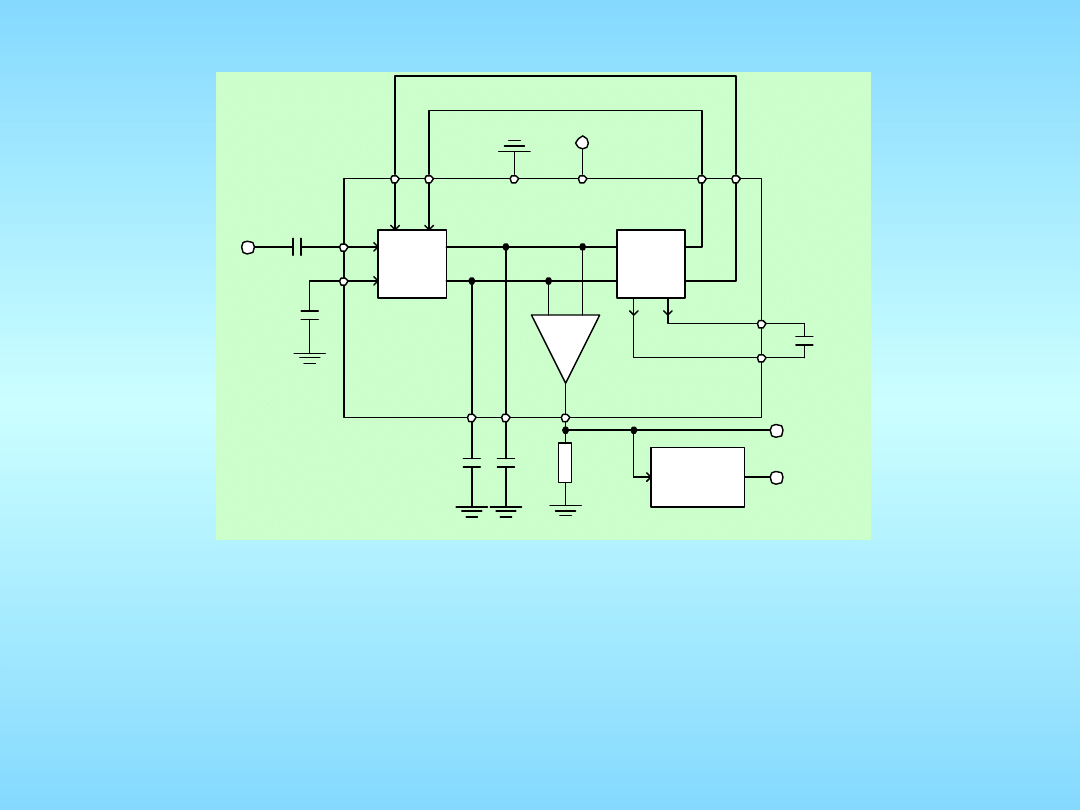
f
i
Schemat demodulatora FM z układem NE 562 firmy Signetics
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
Wyszukiwarka
Podobne podstrony:
R2 02 min
5 Rozp Rady Min 30 04 2004(1)
Prawo budowlane, 17.04.2007 Wykład Prawo Budowlane, ---- brakuje 2,3 min
5 Rozp Rady Min 30 04 2004(1)
rozp Min Infr w spr warunków techn z 12 04 2002
Wykład 04
04 22 PAROTITE EPIDEMICA
04 Zabezpieczenia silnikówid 5252 ppt
Wyklad 04
Wyklad 04 2014 2015
9 Zginanie uko Ťne zbrojenie min beton skr¦Öpowany
04 WdK
04) Kod genetyczny i białka (wykład 4)
2009 04 08 POZ 06id 26791 ppt
2Ca 29 04 2015 WYCENA GARAŻU W KOSZTOWEJ
04 LOG M Informatyzacja log
więcej podobnych podstron