KONTROLA DOWOLNA
POJEDYNCZEGO MIĘŚNIA
• POJEDYNCZY MIĘSIEŃ
• RUCHY JEDNOSTAWOWE
• RUCHY WIELOSTAWOWE
Jak odruchy (neurofizjologiczny podukład)
mogą brać udział w kontroli i
sterowaniu ruchów dowolnych
• Kompleksowa sekwencja ruchów może
być wynikiem połączonych różnych
reakcji odruchowych
•
Odruchy jako integralna część
centralnie generowanej komendy
ruchu celem wykonania łatwo
dostosowujących się, plastycznych
ruchów
Skurcz pojedynczego mięśnia jako
najprostszy przypadek ruchu
• Olbrzymia liczba mechanizmów
odruchowych, biorących początek w różnego
typu receptorach obwodowych, ulega
połączeniu na poziomie interneuronów
• Te mechanizmy odruchowe mają początek w
tysiącach neuronów
• Jak śledzić każdą drogę odruchową i jak je
opisać podczas aktywacji dowolnej mięśnia?
Czy możliwe jest opisanie
czynności wszystkich odruchów
z mięśni przy użyciu kilku
parametrów?
Parametry o funkcjonalnym znaczeniu
I. PODSTAWOWE POJĘCIA Z ZAKRESU
STEROWANIA I KONTROLI RUCHEM
1.
Niezależnie kontrolowana zmienna
(parametr, czynnik)
2. Pętla otwarta – sprzężenia proste (do
przodu)
3.
Sprzężenie zwrotne
- pętla ujemnego sprzężenia zwrotnego
- pętla dodatniego sprzężenia zwrotnego
Elementy teorii sterowania:
Parametr, używany przez ośrodek sterujący do
utworzenia (sformułowania) komendy sygnałów
1.Niezależnie sterowany/kontrolowany
parametr
„ Niezależnie” =
Parametr, który wysyłany jest przez ośrodek
sterujący do wykonawcy (np. do mięśnia)
niezależnie od możliwych zmian na wyjściu czy w
jakimkolwiek czynniku środowiska zewnętrznego
Ośrodek sterujący (kontrolujący)
• może (ale nie musi) zmienić wartość niezależnie
kontrolowanego parametru, bazując na informacjach
z obwodu (np. z receptorów);
• ma wybór odpowiadania lub nie na informacje z
obwodu
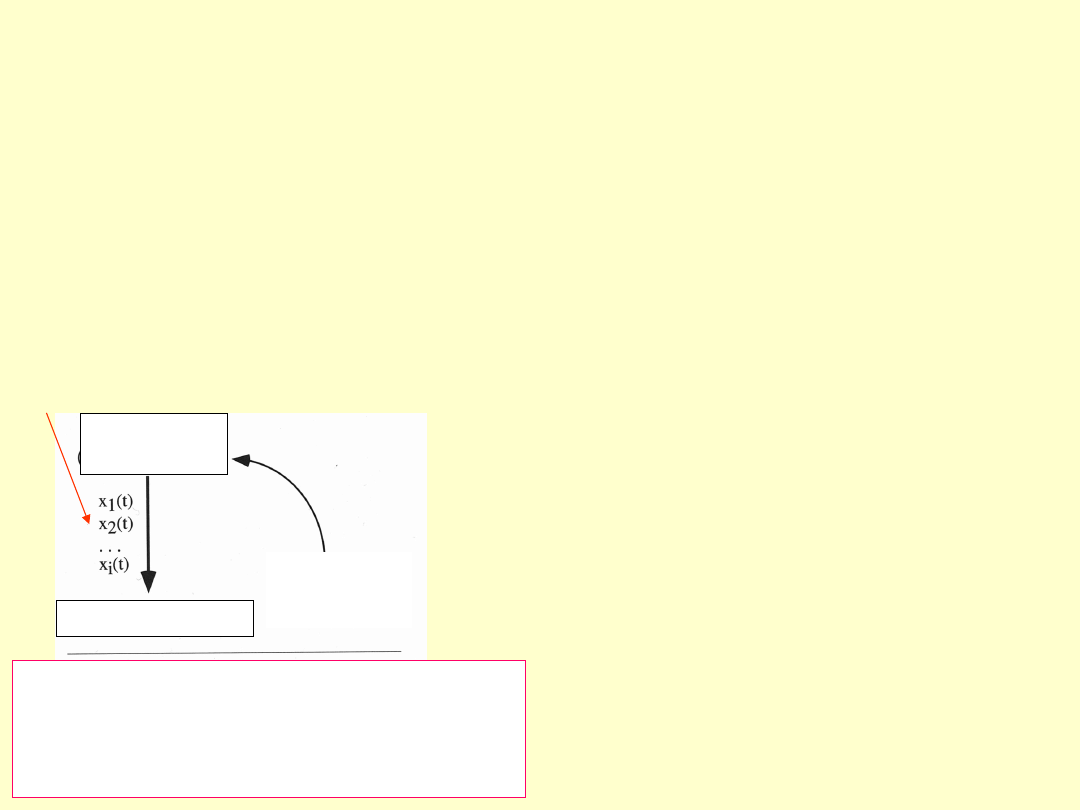
2/ Pętla otwarta – sprzężenia
prostego (do przodu)
Kiedy ośrodek sterujący
wysyła sygnał (zmienną/czynnik lub kilka
czynników/zmiennych) niezależnie od efektów na
wyjściu
Rzut piłki do kosza
Mózg
* Generuje komendę przed rzutem
i
* wysyła komendę do mięśni
zanim wiadomy jest rezultat rzutu
Zmienna/czynnik
niezależnie
kontrolowany/sterowany
Ośrodek
sterujący
WYKONAWSTWO
Informacje
zignorowane
lub użyte
Schemat sprzężenia prostego. Ośrodek
sterujący używa niezależnie sterowanych
parametrów celem sformułowania komendy
sygnałów wysyłanych do niższych
(wykonawczych) struktur.
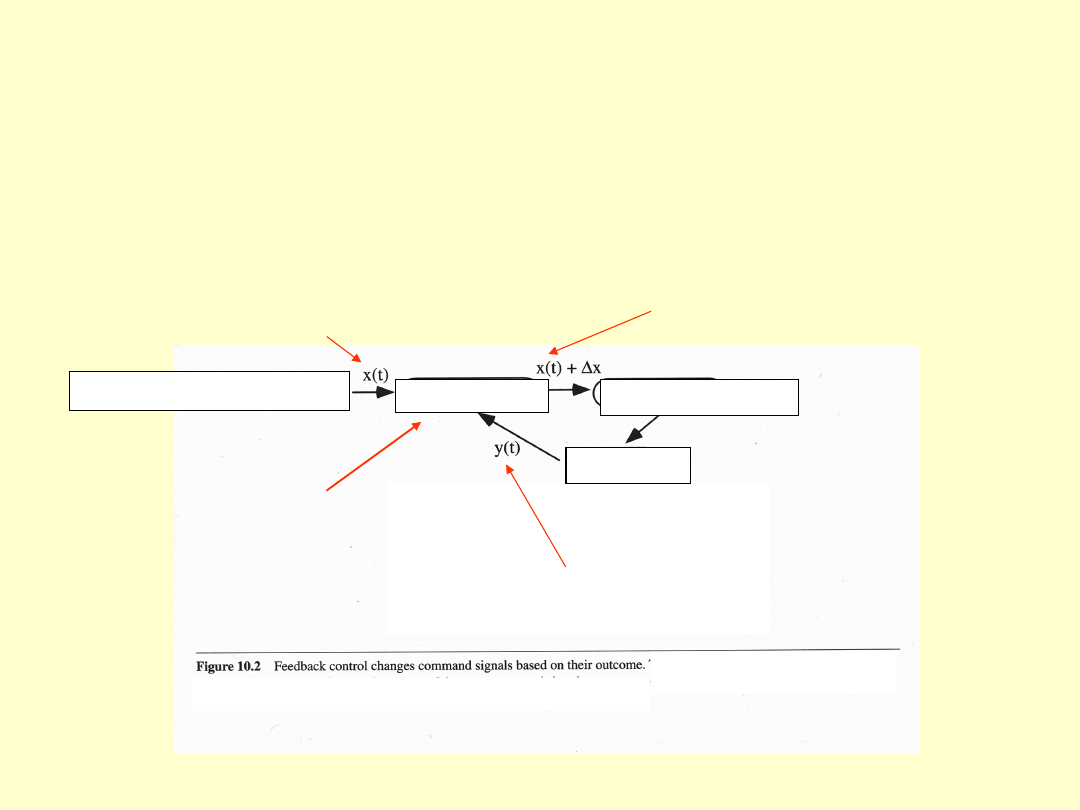
2. Sterowanie zwrotne
kiedy ośrodek sterujący zmienia sygnały
komendy na podstawie rezultatów komendy
Bardzo ważne ogniwo
układu sterowania
zwrotnego; porównuje
bieżące rezultaty z
pożądanym wynikiem;
zmienia sygnały komendy
na podstawie różnicy
efektu pożądanego z
faktycznym.
Pożądany rezultat (wartość
niezależnie sterowanej
zmiennej)
Aktualny rezultat (wartość parametru/zmiennej
obwodowej np. kąta w stawie)
Niezależnie sterowany czynnik (zmienna)
OŚRODEK STERUJĄCY
K
KOMPARATOR =
element/ogniwo
porównujące
WYKONAWSTWO
KOMPARATOR
REZULTAT
Prowadzenie samochodu ze stałą prędkością
Informacji wzrokowej z prędkościomierza lub ruchu środowiska
zewnętrznego
Siła nacisku na pedał gazu lub hamulca dostosowywana jest w zależności od
Kontrola tego typu pozwala na utrzymanie preferowanej prędkości
niezależnie od ukształtowania środowiska (w górę czy w dół), wiatru,
faktu widzenia policji..
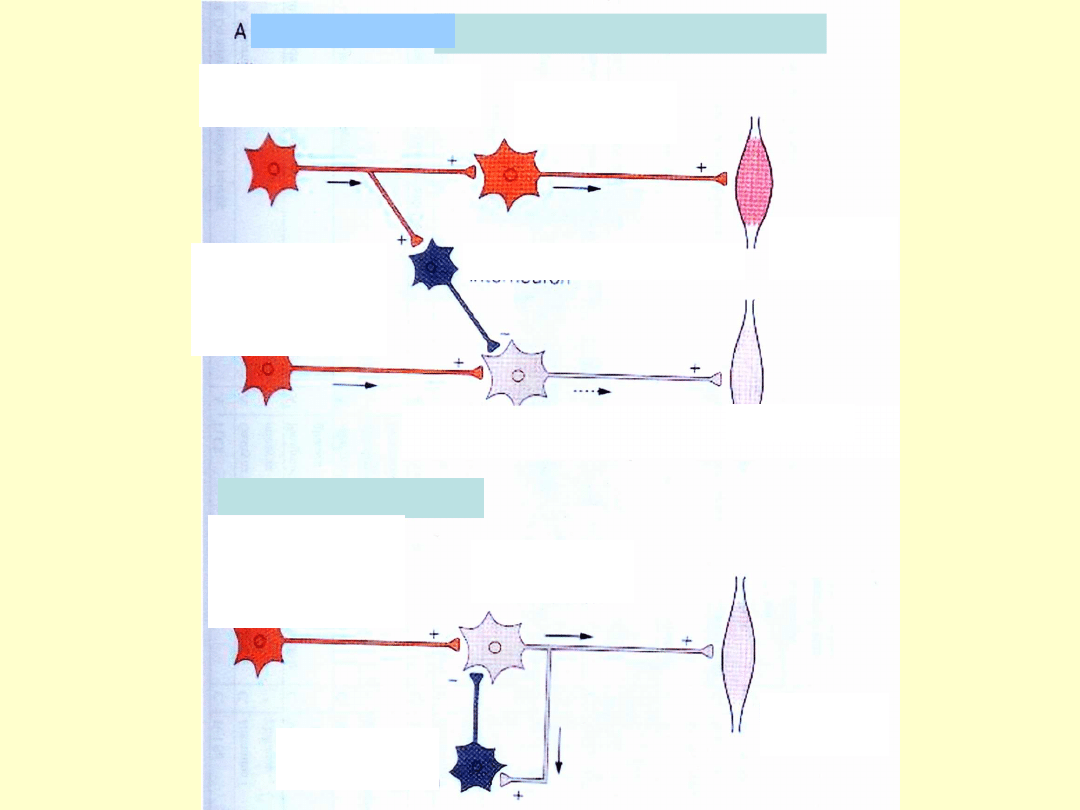
Hamowanie zwrotne
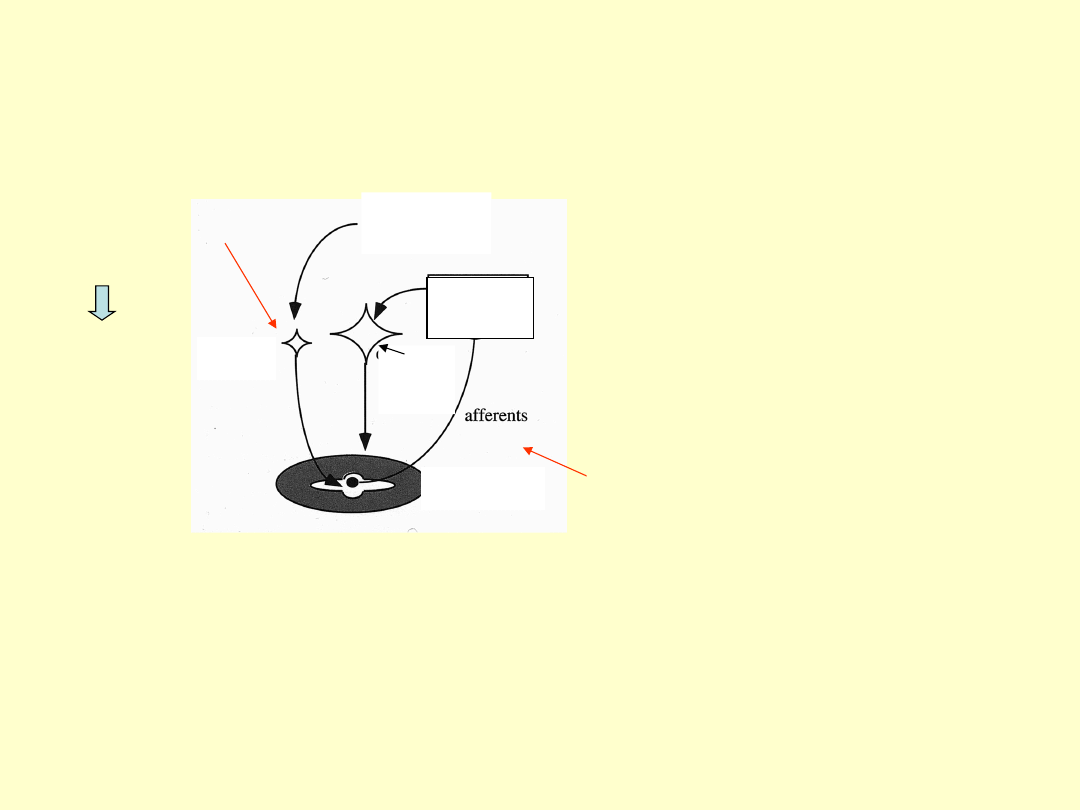
Hamowanie proste (do przodu)
Neuron aferentny
unerwiający prostowniki
Neuron
aferentny
unerwiający
zginacze
Interneuron hamujący
Prostowni
k
Zginacz
Prostowni
k
Interneuron
hamujący
Motoneuron
prostownika
Neuron
aferentny
unerwiający
prostowniki
Motoneuron
prostownika
• Wieczorowi
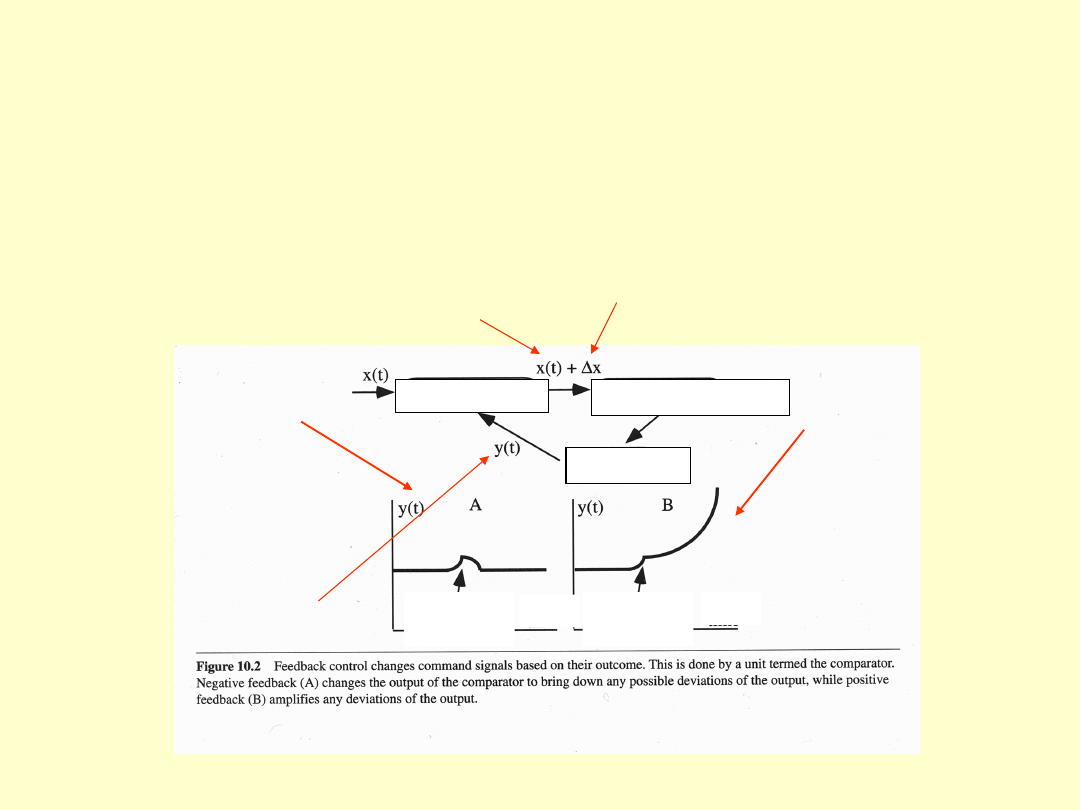
Sterowanie poprzez ujemne i dodatnie
sprzężenie zwrotne
A. Ujemne sprzężenie
zwrotne
* Odejmuje od wartości
parametru kontrolowanego
(x) wartość (∆x)
proporcjonalną do
odchylenia w wartości
parametru obwodowego
(∆y), prowadząc do
zmniejszenia błędu
(odchylenia)
B. Dodatnie
sprzężenie zwrotne
Proporcjonalny do
błędu/odchylenia w wartości
parametru obwodowego (∆y)
Sterowany/kontrolowany parametr
Parametr obwodowy
* Dodaje do wartości
parametru kontro-
lowanego (x) wartość
(∆x), proporcjonalną
do odchylenia w
wartości parametru
obwodowego (∆y),
prowadząc do
zwiększenia błędu
(odchylenia)
* Powiększa
odchylenia
* np. generowanie
potencjału
czynnościowego
* np. odruch na rozciąganie
odchyleni
e
odchyleni
e
czas
czas
KOMPARATOR
WYKONAWSTWO
REZULTAT
Parametry charakteryzujące pętlę
sprzężenia zwrotnego :
OPÓŹNIENIE
– mierzone w jednostkach czasu [s, ms] lub w jednostkach
względnych (procent czasu w stosunku do czasu typowego dla danego procesu
)
WZMOCNIENIE
- stosunek zmiany w parametrze kontrolowanym
do zmian w parametrze obwodowym (∆x/∆y)
Odpowiednie wartości
wzmocnienia i opóźnienia
pętle dodatniego i ujemnego
sprzężenia zwrotnego
uzyskują swoje funkcjonalne
znaczenie (zmniejszają lub
powiększają błąd)
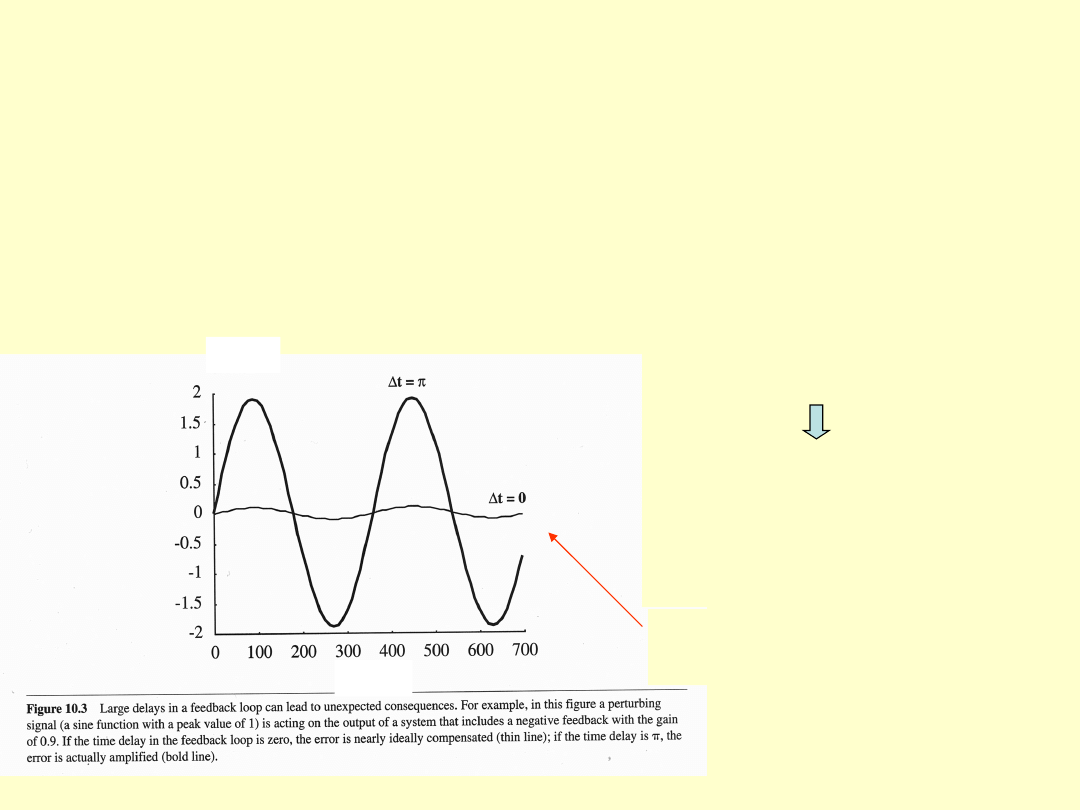
Efekty zbyt dużego
opóźnienia!
Błąd
Czas
Zaburzenie:
funkcja
sinusoidalna
o wartości 1;
Ujemne
sprzężenie
zwrotne o
∆x/∆y = 0.9
opóźnieniu =
0 lub
Czas opóźnienia
Ważny „słaby” punkt sterowania zwrotnego
Kiedy
ważna jest prędkość
ruchu
,
preferowana jest
pętla
otwarta sterowania -
sprzężenie do przodu
Podczas gdy
Ważniejsza
jest
dokładność
ruchu, przewagę ma
sterowanie w pętli zamkniętej -
sprzężenie zwrotne
II. OBWODY STEROWANIA
kombinacja sterowania prostego i
zwrotnego o różnym stopniu złożoności
Generowanie komendy sygnałów na zasadzie
sterowania do przodu
i
korekta sygnałów – jeśli rezultaty są różne od
pożądanych – poprzez sprzężenie zwrotne
Np. Polowanie kota na mysz
Mechanizm sprzężenia
zwrotnego pętli
serwomechanizmu pomaga
w utrzymywaniu stałej
wartości wyniku końcowego
(rezultatu).
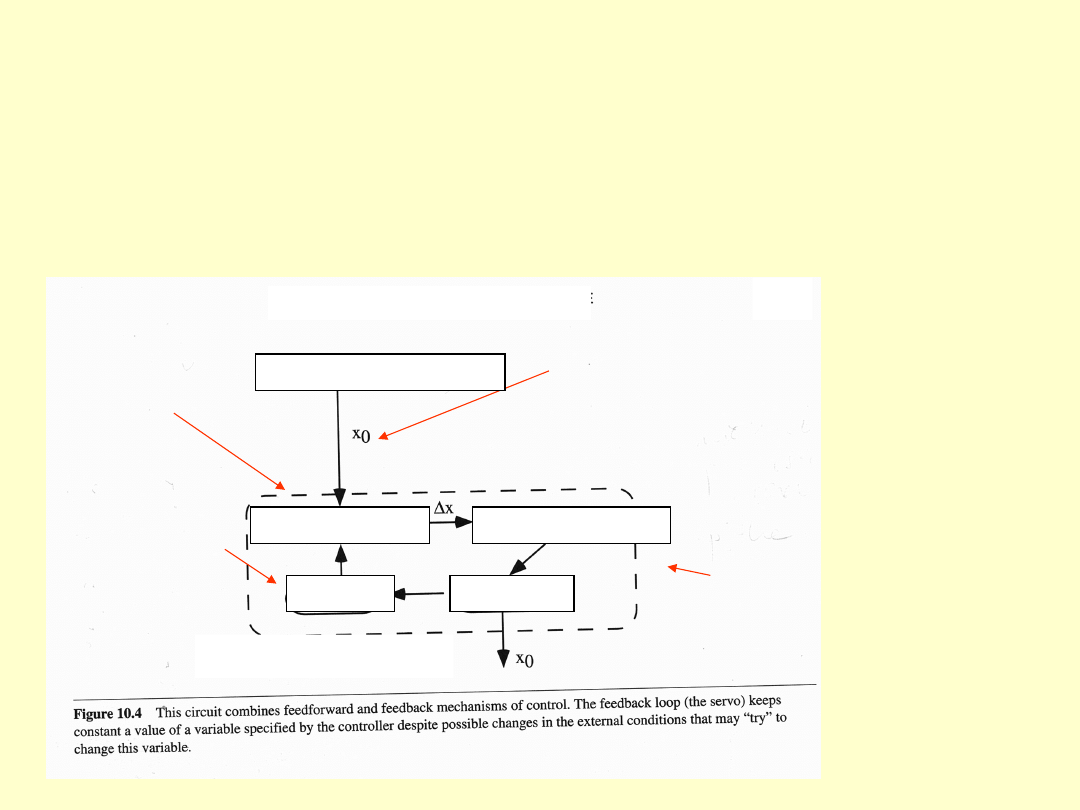
Mechanizm samoczynnej regulacji/
samokontroli (serwomechanizm)
Czujnik
(receptor) mierzy
faktyczną
wartość
parametru i
wysyła
informacje do
komparatora
Porównuje wartość
faktyczną z
wartością
pożądaną i
odpowiednio
zmienia efekty
działania (∆x) na
bazie błędu
(różnicy pomiędzy
wartością
zamierzoną a
faktyczną)
KOMPARATOR
WYKONAWSTWO
CZUJNIK
REZULTAT
Sygnał
(ma zakodowaną wartość parametru
wyjściowego, którego wartość ma być
stała)
wysyłany przez ośrodek sterujący w pętli
sprzężenia prostego (do przodu) do pętli
sprzężenia zwrotnego (do
serwomechanizmu)
OŚRODEK STERUJĄCY
serwomechanizm
Obecność błędu jest niezbędnym
elementem funkcjonowania
serwomechanizmu
Dobry
serwomechanizm
pozwala na małe błędy i
natychmiast je koryguje
Słabe serwomechanizmy
Duże
wzmocnienie
(∆x/∆y)
Mogą mieć
znaczące
opóźnienie w
korekcji błędów
Błędy mogą
być duże
Małe
opóźnienie
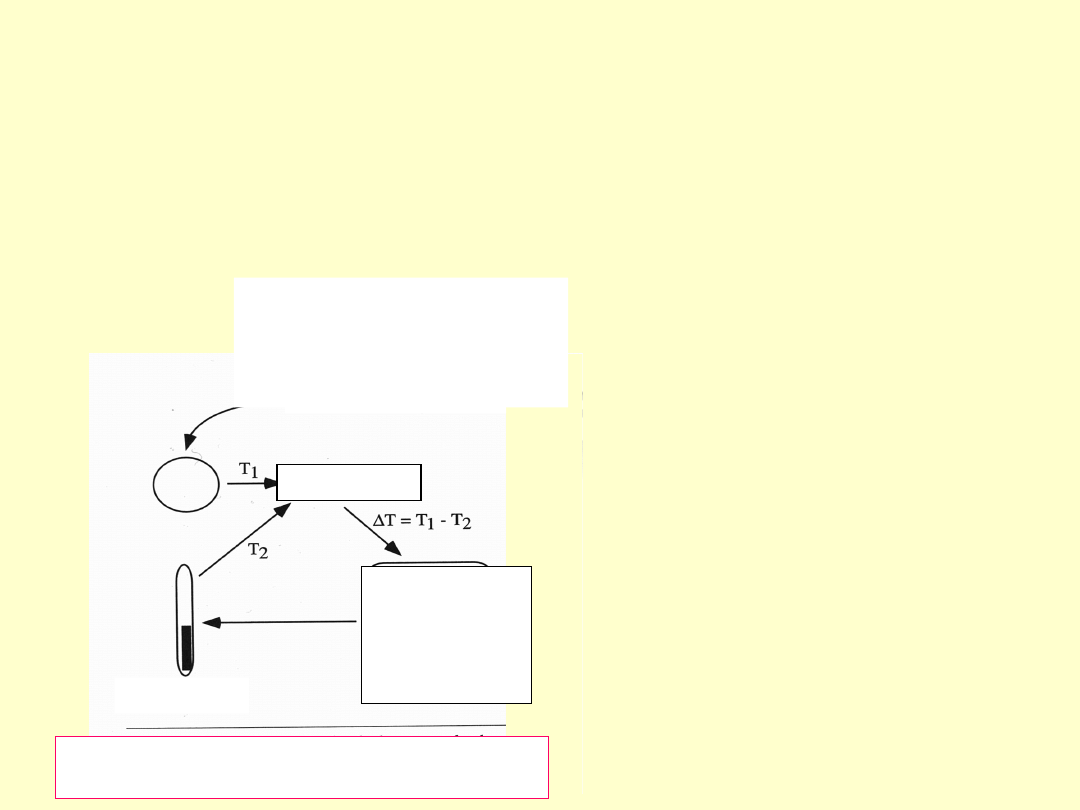
Termostat jako przykład
serwomechanizmu
Termostat utrzymuje stałą
temperaturę
pomieszczenia dzięki
użyciu elementu
porównującego
(komparatora), który
porównuje aktualną
temperaturę z wartością
wcześniej nastawioną
(pożądaną)
System
podgrzewając
y lub
chłodzący
termometr
komparator
Sygnał wejściowy do
serwomechanizmu
ustalasz przez ustawienie
tarczy termostatu
Schemat termostatu utrzymującego stałą
temperaturę pomieszczenia
Zależność między czasem opóźnienia a
błędami
Im dłuższy czas opóźnienia
większe błędy zanim zaczną działać
mechanizmy korekcyjne
serwomechanizmu
W organizmie człowieka
opóźnienia związane są z prędkością przesyłania
informacji (prędkość przewodzenia potencjału
czynnościowego: kilkadziesiąt do stu ms = opóźnienie
porównywalne z najkrótszym czasem wykonania ruchu
dowolnego)
Nawet najlepszy serwomechanizm w naszym ciele
nie może działać w pełni optymalnie
Serwomechanizm jest elementem automatycznym
systemu kontroli (obwodów sterowania)
Ustawienie pożądanej wartości parametru wyjściowego
zapoczątkowuje pracę serwomechanizmu niezależnie od
innych czynników
(dopóki wcześniej ustawiona wartość nie ulega zmianie)
Użycie serwomechanizmów
natychmiast upraszcza kontrolę (sterowanie)
w
kompleksowym systemie (w obwodach sterowania)
ponieważ część odpowiedzialności spada na „niższe”
serwomechanizmy.
Wyższy poziom może ignorować szczegóły, a
koncentrować się na bardziej ogólnych i ważnych
parametrach (czynnikach)
III. Hipoteza samoczynnej
kontroli/sterowania (serwomechanizmu)
R.A. Merton (1950)
Pierwsza hipoteza dotycząca mechanizmu sterowania
ruchami dowolnymi
Wykorzystanie mechanizmów samoregulacji odruchów mięśniowych
w generowaniu ruchów dowolnych
Kontrola wrzecionek mięśniowych z układem jako
część serwomechanizmu kontrolującego długość
mięśnia
Wzrost
wrażliwości
motoneuronów
i rezultaty tego
wzrostu są
zbliżone do
efektów zmian
długości mięśnia
Sygnały
zstępujące
symulują nową
długość
mięśnia
Komenda
centralna
Łuk
TOR
mięsień
MN
MN
Hipoteza serwomechanizmu
zakłada, że pętlę sprzężenia
zwrotnego:
długość mięśnia –
wrzecionko mięśniowe –
TOR –
aktywność motoneuronów -
zmiana siły mięśnia –
ruch –
zmiana długości mięśnia
jest idealnym
serwomechanizmem.
Wzrost długości mięśnia (pobudzenia motoneuronów
)
Zwiększona aktywność wrzecionek
Dodatkowy skurcz mięśnia
Skrócenie długości mięśnia
Spadek aktywności wrzecionek mięśniowych
pobudzenie motoneuronów
Ruch odbywa się tak długo
dopóki mięsień nie uzyska nowej długości,
przy której
aktywność wrzecionek mięśniowych
doprowadzi do skurczu mięśnia
równoważącego dokładnie obciążenie
zewnętrzne,
to jest do nowego stanu równowagi
Stała komenda ośrodkowa
Mechanizm TOR zapewnia stałą długość mięśnia (niezależnie od
możliwych zmian w obciążeniu zewnętrznym)
Idealny serwomechanizm
Wzrost obciążenia → Wzrost długości mięśnia → wzrost aktywności
motoneuronów → wzrost siły skurczu mięśnia →
Zgodnie z hipotezą Mertona
Wzrost siły mięśnia będzie dokładnie równoważył zmiany w
obciążeniu zewnętrznym
tak, że
długość mięśnia nie ulegnie zmianie
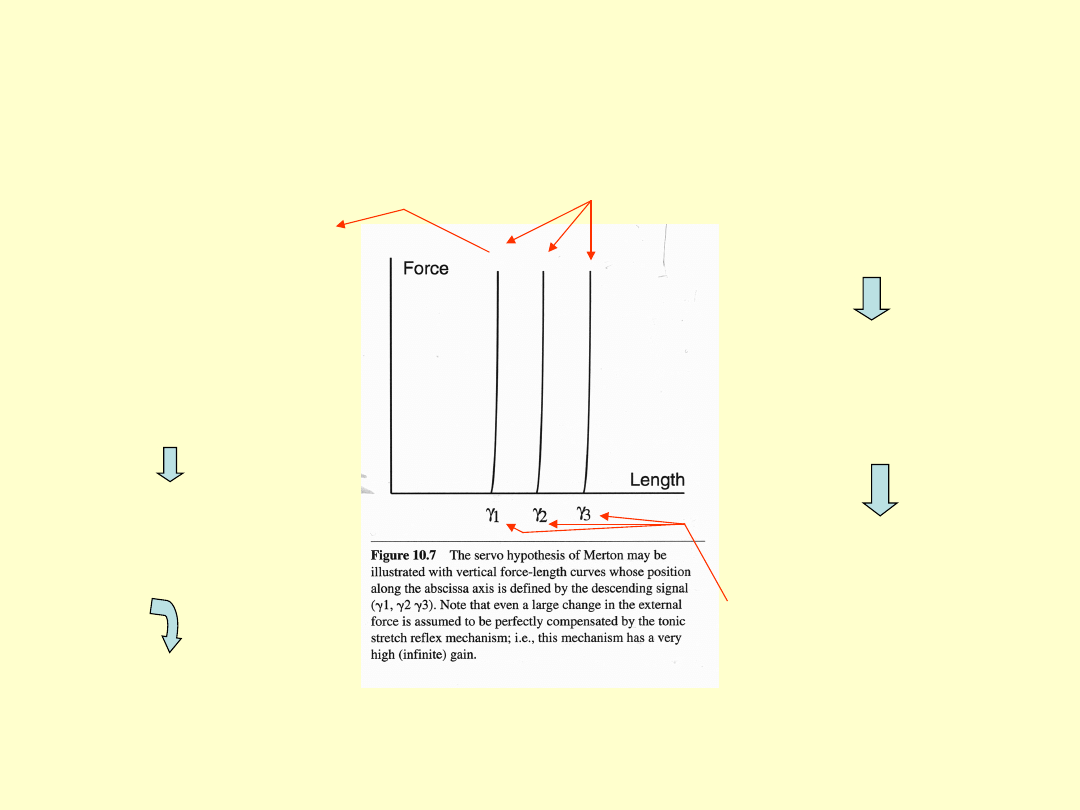
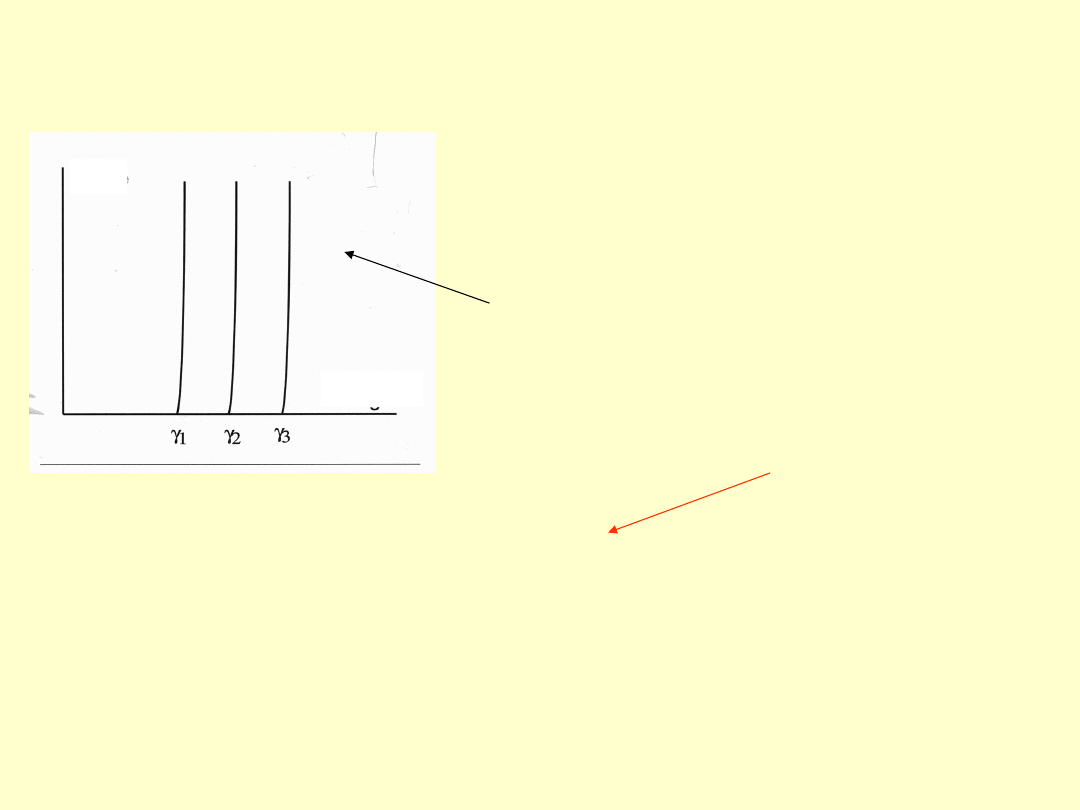
Hipoteza serwomechanizmu i
zależność siła-długość (F-L)
mięśnia
Komenda centralna (ośrodkowa)
określa położenie krzywej siła-
długość mięśnia odpowiadające
określonej długości mięśnia
Przy danej, stałej komendzie
centralnej (1) długość
mięśnia nie ulega zmianie
niezależnie od obciążenia
zewnętrznego
(serwomechanizm zapewnia
idealną kompensację
możliwych zmian w
obciążeniu zewnętrznym)
Zależność F-L (powiązana
z tonicznym odruchem na
rozciąganie) musi być
pionowa
Wzmocnienie
tonicznego odruchu na
rozciąganie (∆x/∆y)
musi być bardzo duże
Ruchy dowolne wykonywane
są przez przesuwanie
charakterystyki siła-długość
wzdłuż osi x
Niezależnie
kontrolowany parametr
może być związany z
sygnałem wysyłanym
do motoneuronów
(1,
2, 3).
IV. KOAKTYWACJA MOTONEURONÓW ALFA i
GAMMA
Hipoteza samoczynnej kontroli (serwomechanizmu):
Ruchy dowolne inicjowane są przez zmianę w
aktywności motoneuronów a zmiany w aktywności
motoneuronów pojawiają się z pewnym
opóźnieniem (charakterystycznym dla TOR)
Wyniki badań A. Vallbo
W czasie ruchów dowolnych występuje
jednoczesne pobudzenie (aktywacja) motoneuronów i ,
tak zwana
koaktywacja (współpobudzenie) -
Jak pogodzić ze sobą hipotezę samoczynnej
kontroli z koaktywacją -?
• serwomechanizm działa zgodnie z propozycją Merton’a,
podczas gdy
•
ruchy dowolne inicjowane są poprzez kombinację
komendy do motoneuronów wysyłanej na zasadzie
pętli otwartej i sygnałów wysyłanych do motoneuronów
(serwomechanizmu kontrolującego długość mięśnia)
Hipoteza serwomechanizmu
zakładała bardzo duże wzmocnienie
(jakakolwiek zmiana w obciążeniu
zewnętrznym natychmiast jest
balansowana przez zmiany w sile
mięśnia przy braku zmian długości
mięśnia )
????
Wzmocnienie TOR ma stosunkowo małą wartość!!!!
, czyli że
mechanizm ten nie może być rozpatrywany jako idealny
serwomechanizm
Dlaczego hipoteza samoczynnej kontroli
(serwomechanizmu) została zastąpiona przez
inne?
siła
długość
V. Dowolna aktywacja mięśnia –
aktualnie dwie teorie
1. Model
2. Hipoteza punktu równowagi
1. Model
• Komenda centralna bezpośrednio określa poziom
aktywności
puli motoneuronów i tym samym poziom aktywności
mięśnia.
•
zakłada, że mechanizmy odruchów nie odgrywają
znaczącej roli,
co pozostaje w sprzeczności z wynikami badań
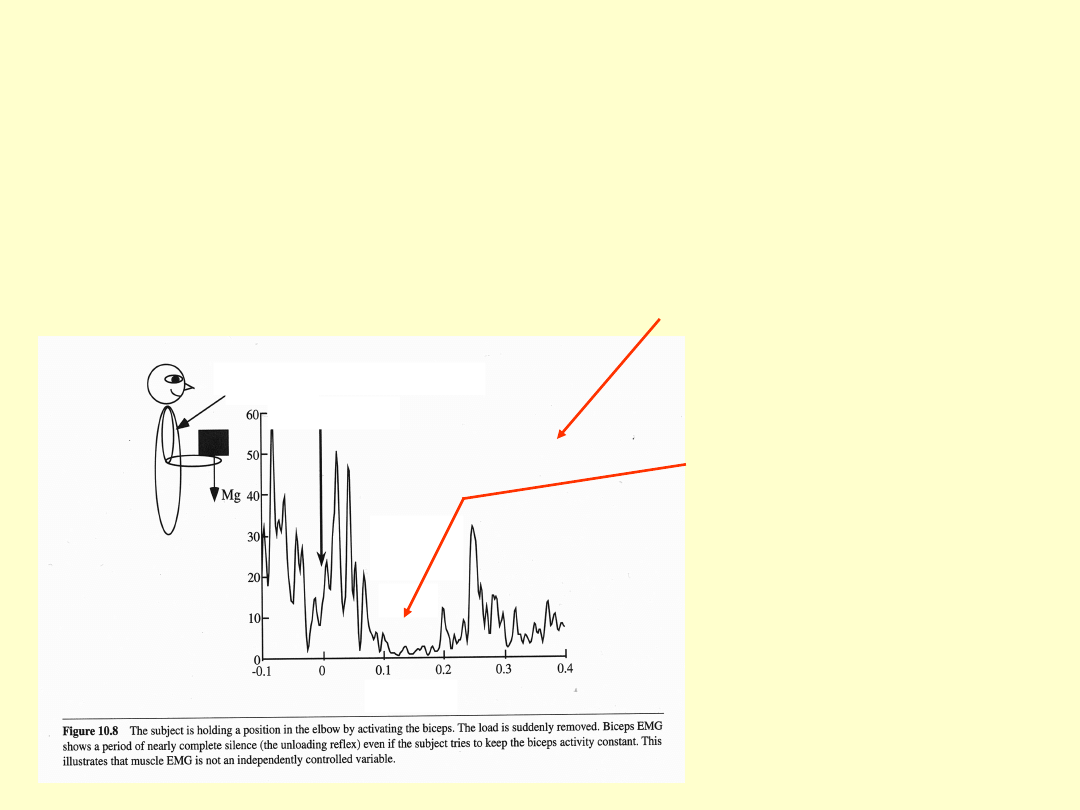
Odwrotnie do odruchu
na rozciąganie:
Odciążenie → Szybki
skurczu mięśnia → Spadek
długości mięśnia (przy
dużej ujemnej prędkości)
→ Zakończenia czuciowe
wrzecionek mięśniowych
przestają być pobudzane
→ zanika wpływ
odruchowy wrzecionek na
macierzysty motoneuron
Odruch
odcią-
żenia
EMG z mięśnia dwugłowego
zaburzenie
Czas [s]
2. Hipoteza punktu równowagi
Komenda centralna wykorzystuje mechanizmy odruchów z
mięśni aby zapoczątkować zmiany w aktywności mięśnia i
określa parametry tych odruchów
• Zgodna z wynikami badań dotyczących zależności
siła-długość pojedynczego mięśnia u zwierząt oraz
moment siły-kąt w stawie u ludzi.
Jak badać wpływ komendy ośrodkowej?
Badania na kotach z uszkodzonym ośrodkowym układem
nerwowych (brak zdolności wykonywania ruchów
dowolnych)
elektrostymulacja
zachowanej, niewielkiej części mózgu
kota
jako symulacja komendy ośrodkowej
siła
Hipoteza punktu równowagi
Obciążenie 2
siła
Obciążenie 1
długość
Główna myśl hipotezy punktu
równowagi
Kombinacja długości i siły mięśnia w momencie
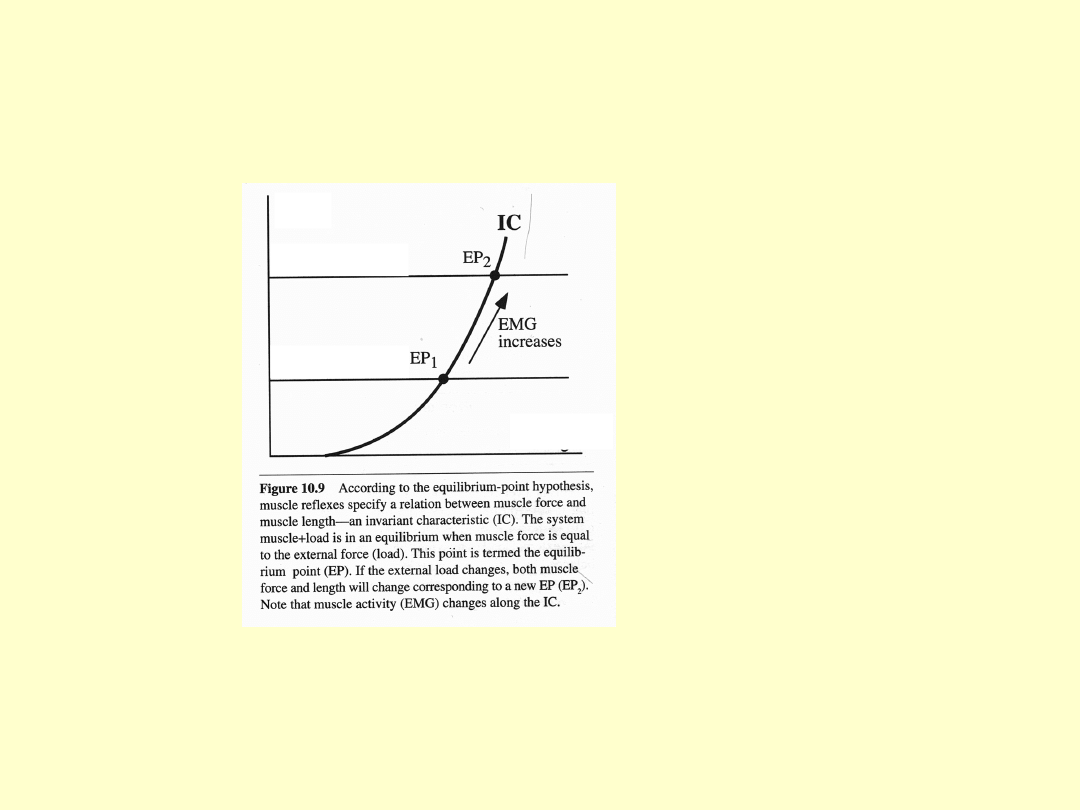
równowagi nazywa się punktem równowagi
Zmiany w obciążeniu zewnętrznym
prowadzą do zmian długości
mięśnia, które
zapoczątkowują/inicjują zmiany w
poziomie aktywności mięśnia (za
pośrednictwem łuku odruchowego
odruchu na rozciągania)
Stała komenda zstępująca nie oznacza
stałego poziomu pobudzenia mięśnia
Wszystkie punkty
równowagi na
płaszczyźnie siła-długość
tworzą krzywą zwaną
niezmienną
charakterystyką (IC)
Wzrost EMG
długość
siła
Obciążenie 2
Obciążenie 1
“stała” komenda zstępująca IC = niezmienna charakterystyka
Zmiana w poziomie aktywności mięśnia
prowadzi do jednoczesnej zmiany długości i siły
mięśnia tak długo aż osiągnięty zostanie nowy
punkt równowagi
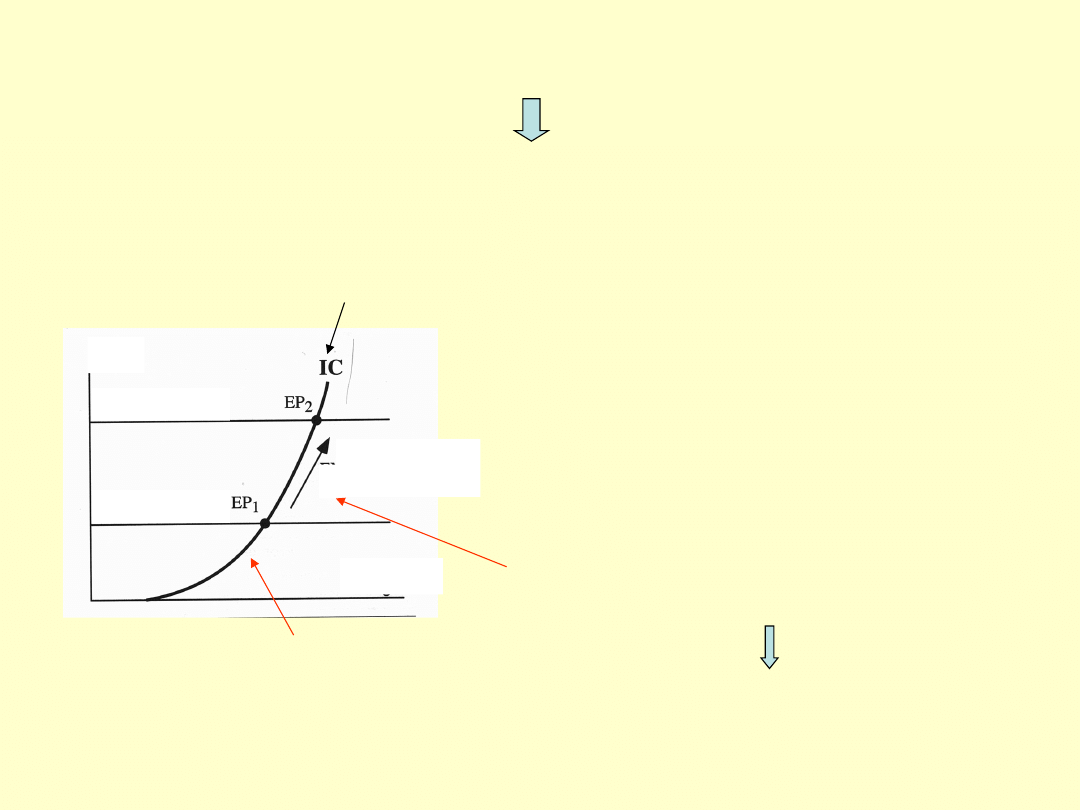
Co się stanie gdy zostanie zmieniona
“komenda centralna” (elektrostymulacja)?
Pojawia się nowa krzywa – niezmienna charakterystyka,
przesunięta w stosunku do pierwszej
Jaki parametr może mieć zakodowane
położenie niezmiennej
charakterystyki?
Próg tonicznego odruchu na
rozciąganie
(długość, przy której następuje
samoczynna aktywacja kilku
motoneuronów
)
Jest
parametrem kontrolowanym
niezależnie
,
ponieważ zmiany w obciążeniu
zewnętrznym są w stanie jedynie
przesuwać punkt równowagi wzdłuż
niezmiennej charakterystyki
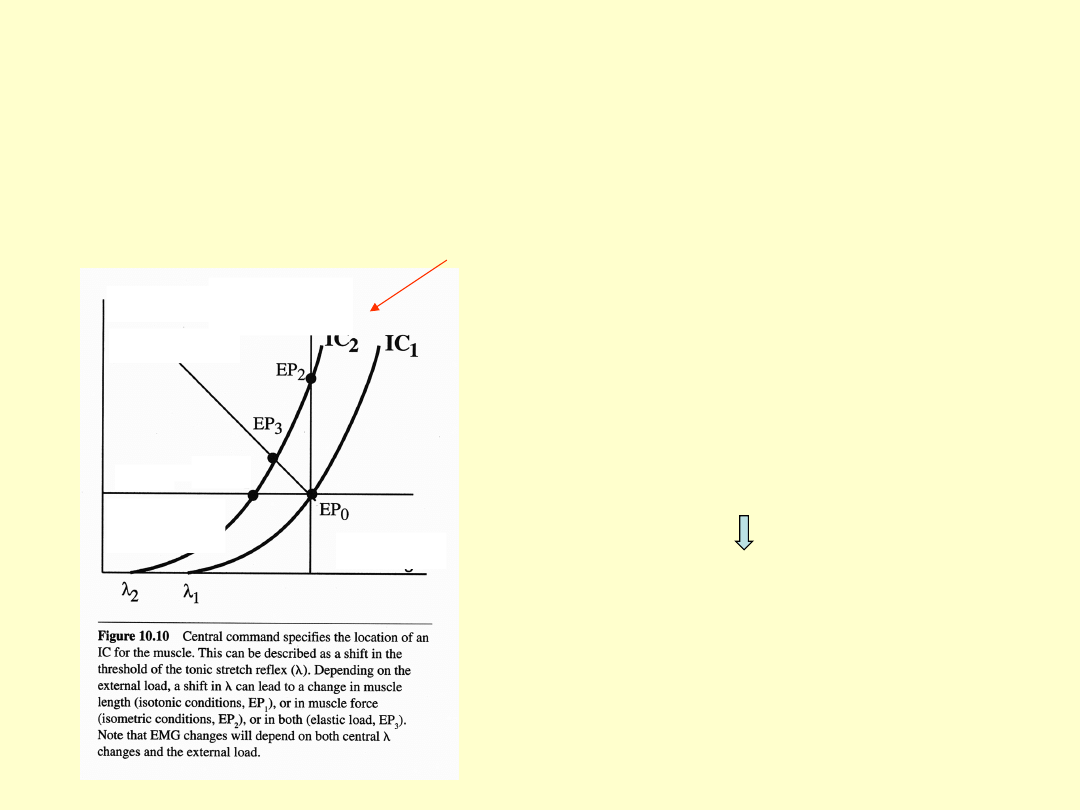
izometryczn
e
długość
siła
izotoniczn
e
EP1
elastyczne
W jaki sposób odbywa się ruch zgodnie
ze schematem hipotezy punktu
równowagi?
• Mogą być wynikiem
zmian obciążenia
zewnętrznego
• Mogą być inicjowane
poprzez przesunięcie
niezmiennej
charakterystyki, które
w zależności od
obciążenia
zewnętrznego, może
dać różny efekt
izometryczn
e
elastyczn
e
długość
siła
Próg TOR
Izoto-
niczne
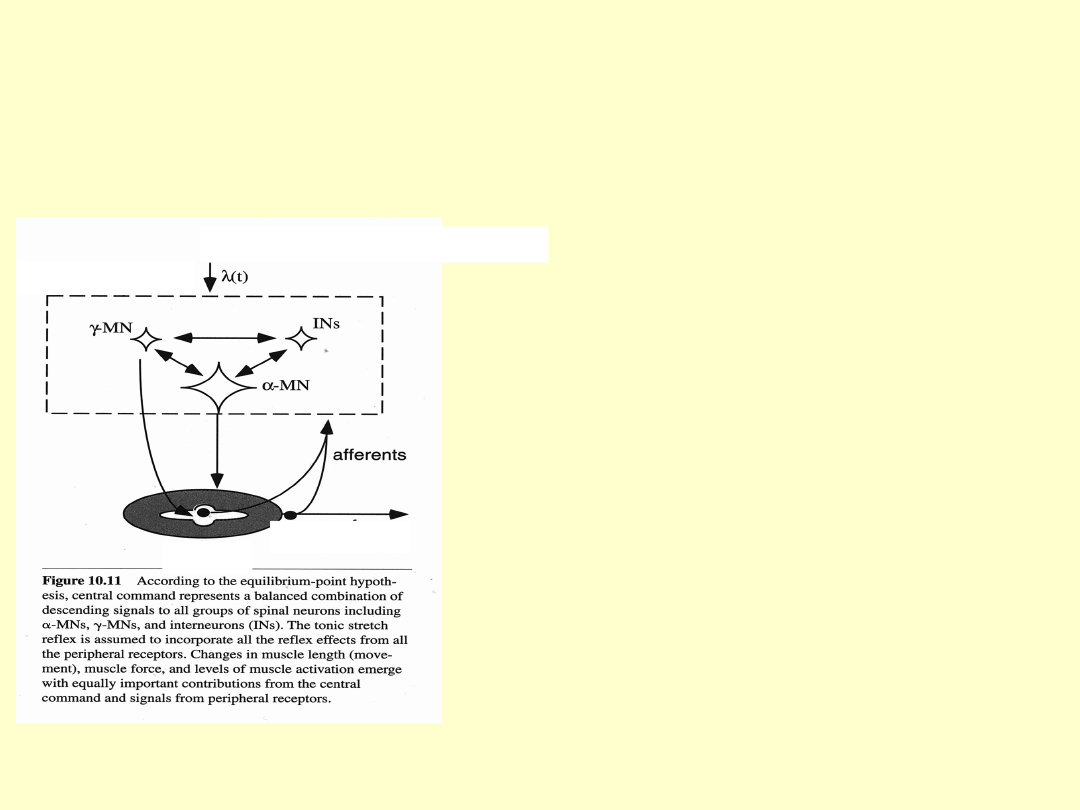
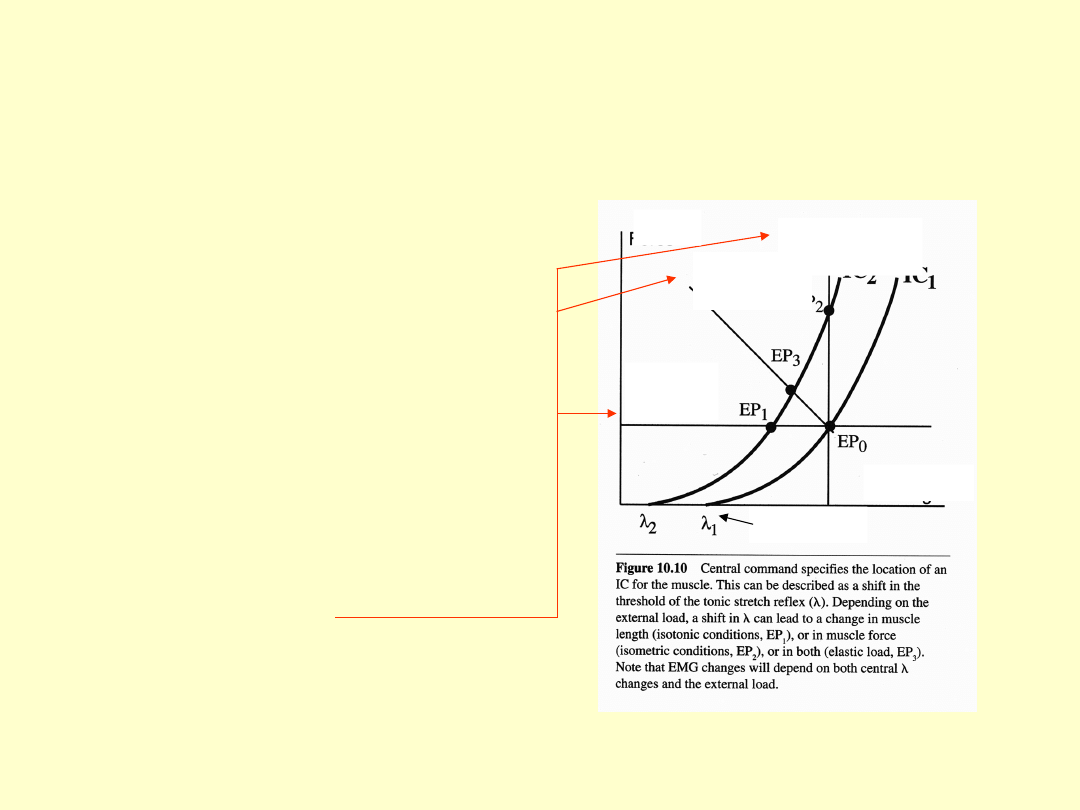
Mechanizmy neurofizjologiczne
hipotezy punktu równowagi
Komenda centralna dla ruchu
dowolnego jest zrównoważoną,
wyważoną kombinacją sygnałów
do wszystkich rodzajów
neuronów rdzeniowych.
Aktualny poziom aktywności
mięśnia (EMG) i siły mięśnia
oraz ruch są rezultatem tejże
centralnej komendy
Mechanizm TOR
Komenda centralna (próg TOR)
Długość, siła
Mięsień
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
Wyszukiwarka
Podobne podstrony:
Projekt P03 Sterowanie siłownikiem pneumatycznym pojedynczym sygnałem Instrukcja
Układy Napędowe oraz algorytmy sterowania w bioprotezach
PODSTAWY STEROWANIA SILNIKIEM INDUKCYJNYM
Sterowce
WYKŁAD 02 SterowCyfrowe
wykład 4 Sterowanie zapasami
Sterowniki PLC
Hazardy sterowania
12 Podstawy automatyki Układy sterowania logicznego
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
41 Sterowanie
więcej podobnych podstron