
NAPĘD
ELEKTRYCZNY
Teresa Orłowska-Kowalska,
prof. dr hab. inż.
Zakład Napędów Elektrycznych
www.imne.pwr.wroc.pl/zne
godz. konsultacji: wt.11-13,
czw.11-13

WYKŁAD 14
Metody regulacji
prędkości SI.
Częstotliwościowe
sterowanie prędkością
silnika indukcyjnego
Metody regulacji
prędkości SI
Metody regulacji prędkości wynikają z
zależności:
1. – przez zmianę częstotliwości napięcia
zasilającego;
2. – przez zmianę poślizgu;
3. – przez zmianę liczby par biegunów.
s
p
f
s
b
s
s
1
π
2
1
1
2
3
Regulacja
częstotliwościowa
Regulacja prędkości SI
poprzez zmianę częstotliwości
napięcia zasilającego jest
najbardziej efektywna.
Przy czym – równocześnie ze
zmianą f
s
musi zachodzić
jednoczesna regulacja
amplitudy napięcia lub prądu
stojana
zasilającego silnik.

Regulacja
częstotliwościowa
Napędy z SI spełniają takie same
wymagania, jak napędy z SPS, ale
przewyższają SPS-y:
-niezawodnością,
-gabarytami,
-odpornością na warunki pracy,
- niższą ceną,
- przy sterowaniu
częstotliwościowym umożliwiają
rozszerzenie zakresu regulacji
prędkości kątowej w stopniu
niemożliwym do uzyskania w
napędach z SPS.

Regulacja
częstotliwościowa
Realizację sterowania
częstotliwościowego silników
klatkowych umożliwiają
statyczne przemienniki
częstotliwości:
- przemienniki bezpośrednie
tzw. cyklokonwertory,
- przemienniki pośrednie

Regulacja
częstotliwościowa
Przemienniki pośrednie dzielą
się (ze względu na budowę)
na:
- PCz z falownikiem prądu
i
regulowanym prądem obwodu
pośredniego,
- PCZ z falownikiem napięcia i
regulowanym napięciem obwodu
pośredniego,
- PCz z falownikiem napięcia z
modulacją szerokości impulsów
wyjściowych MSI i stałą wartością
napięcia obwodu pośredniego
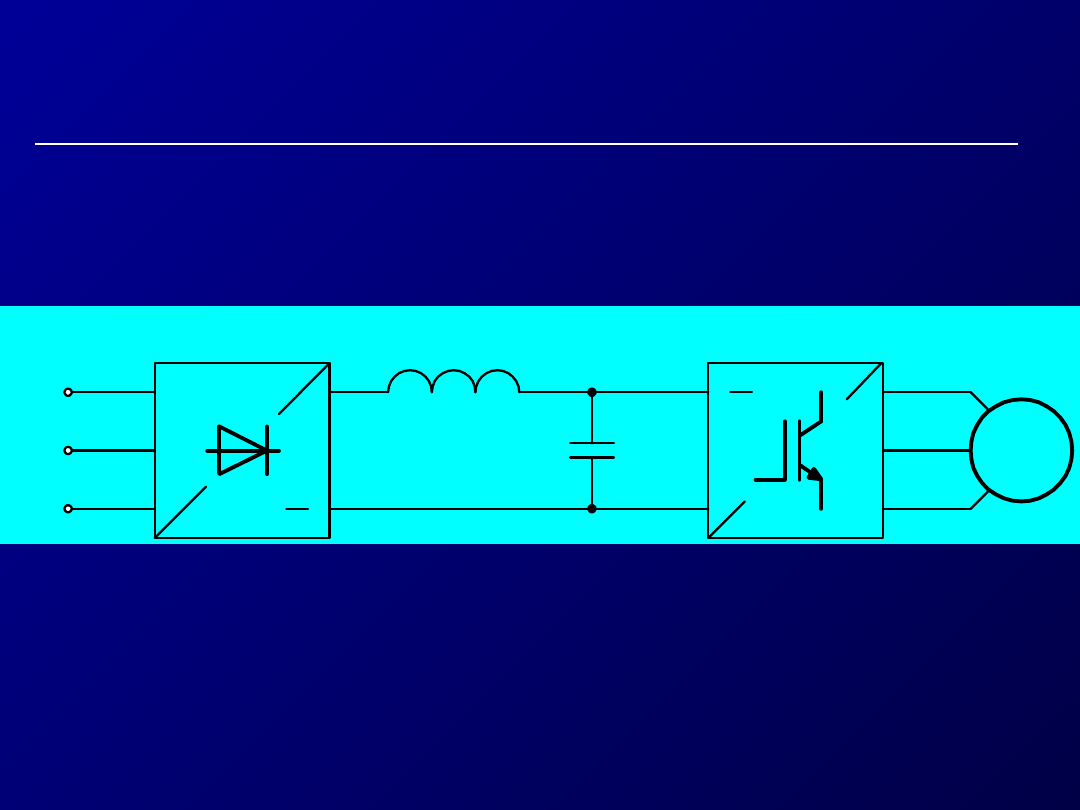
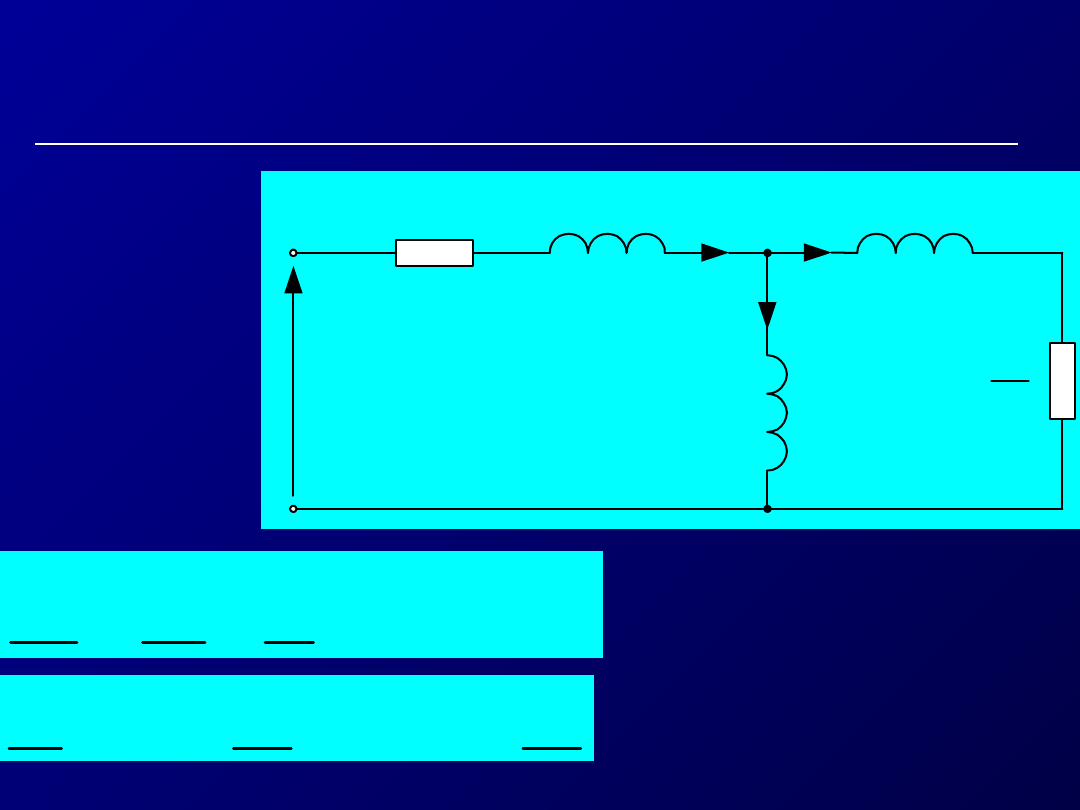
Przemienniki pośrednie -
przykład
Rys. 1. Schemat blokowy FN z
modulacją szerokości impulsów
(MSI)
~
P
3
2
1
L
L
L
~
F
M
~
L
C

Regulacja
częstotliwościowa
Podstawą regulacji
częstotliwościowej jest
utrzymanie
stałej wartość
przeciążalności momentem
silnika w całym zakresie ,
a także
ograniczenie strat
poślizgowych.
Uzyskuje się to przez
utrzymanie stałej wartości
strumienia stojana lub wirnika.

Podział metod regulacji
częstotliwościowej
1. Metody
skalarne
–
polegające na
kształtowaniu
amplitud
sygnałów sterujących ;
2. Metody
wektorowe
-
polegające na kształtowaniu
amplitud
i
położeń
kątowych
(wektorów)
sygnałów sterujących

Sterowanie
częstotliwościowe
skalarne
Sterowanie skalarne można
zrealizować w dwojaki
sposób:
1 - poprzez sterowanie
amplitudą i częstotliwością
napięcia stojana
;
2 - poprzez sterowanie
amplitudą prądu stojana i
częstotliwością wirnika
f
r
=sf
s
.

Sterowanie
częstotliwościowe
skalarne
Sterowanie takie,
przy
zachowaniu stałości
strumienia skojarzonego
stojana
, zapewnia
liniowość
części roboczej
charakterystyk
elektromechanicznych,
silnika niezależnie od
częstotliwości zasilania
stojana f
s
.
Metoda skalarna U=f(
s
)
Poślizg s
k
i moment krytyczny
M
k
SI -uproszczone – ( R
s
=0;
dla P
N
> 10 kW):
0s
= 2
f
s
– pulsacja synchroniczna
stojana
'
0
'
'
r
s
s
r
r
s
r
k
L
L
R
X
X
R
s
'
2
0
2
0
2
2
3
2
3
r
s
s
s
r
s
s
s
k
L
L
pU
X
X
pU
M

Metoda skalarna U=f(
s
)
Z zależności tych wynika, że:
-poślizg krytyczny silnika
indukcyjnego przy regulacji
częstotliwościowej zmienia się
odwrotnie proporcjonalnie do
częstotliwości;
-wartość momentu
krytycznego zależy od
kwadratu stosunku (U
s
/ f
s
)
2
.

Metoda skalarna U=f(
s
)
A więc,
jeżeli pominie się rezystancję
uzwojeń stojana R
s
,
to
proporcjonalna (U
s
/ f
s
=const )
regulacja napięcia zasilającego i
częstotliwości zapewni
stałość
momentu krytycznego silnika M
k
!
W rzeczywistości jednak
wpływ rezystancji uzwojeń
stojana powoduje, że
strumień, a więc i moment
krytyczny M
k
maleje wraz ze
zmniejszaniem częstotliwości
napięcia zasilającego !
Wpływ R
s
na stumień i
moment SI przy
sterowaniu U/f
s
=const
Schemat
zastępczy
silnika dla
pierwszej
harmonicz
nej
napięcia
zasilające
go:
s
R
s
X
s
R
r
'
s
I
'
r
I
m
I
m
X
'
r
X
s
U
s
s
s
s
s
jX
R
I
E
U
s
sN
s
s
s
s
s
s
c
c
E
0
s
–względna
pulsacja
synchroniczna
stojana
sN
– znamionowa
pulsacja syn.
stojana
Metoda skalarna U=f(
s
)
Reaktancja rozproszenia uzwojenia stojana
dla dowolnej częstotliwości:
Po podstawieniu do Es otrzymuje się
zależność na strumień:
przy danym prądzie stojana
strumień
określony jest przez stosunek napięcia do
jego aktualnej częstotliwości,
ale zależy
również od spadku napięcia na R
s
!
sN
s
s
sN
s
s
s
s
X
L
L
X
0
s
sN
s
sN
L
X
X
sN
sN
s
s
s
s
s
s
sN
e
s
X
I
j
R
I
U
c
1
Metoda skalarna U=f(
s
)
W zakresie niskich prędkości
kątowych, a więc niskich
częstotliwości,
udział tego spadku
napięcia będzie rósł i powodował
obniżenie wartości strumienia stojana,
a tym samym momentu krytycznego
silnika
:
2
2
2
2
2
2
2
0
2
2
3
2
3
rN
sN
s
s
s
s
s
s
sN
r
s
s
s
s
s
k
X
X
R
R
U
p
X
X
R
R
pU
M
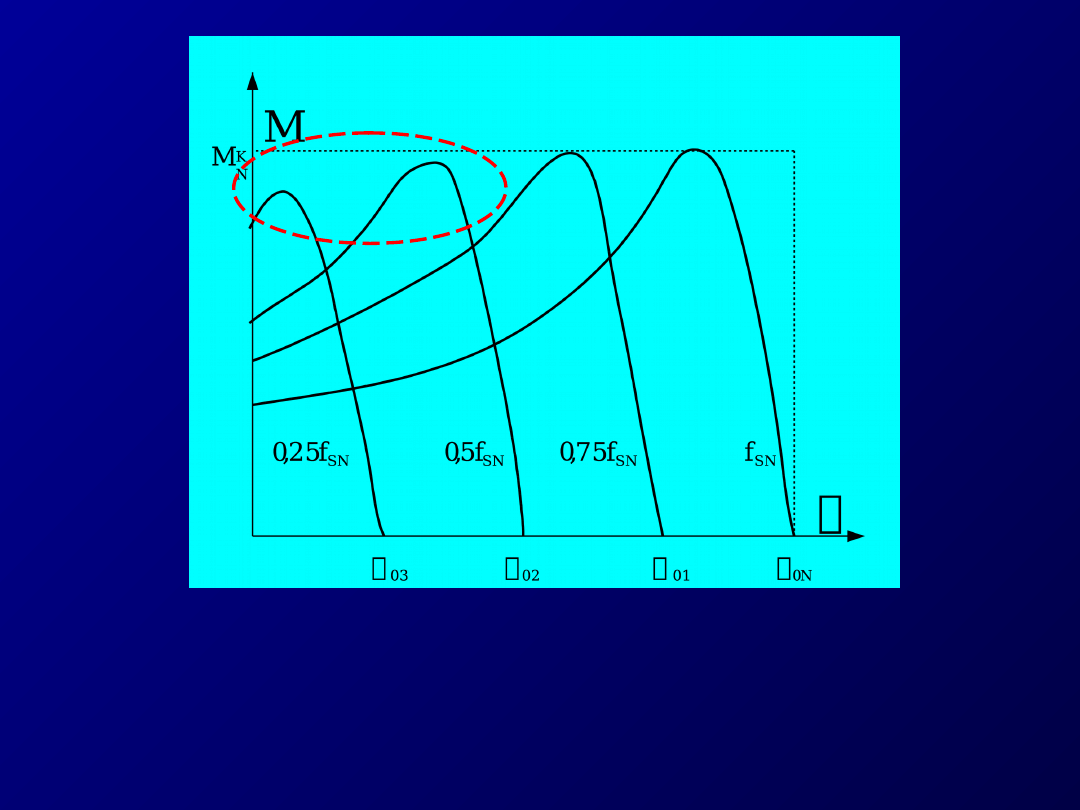
Rys.3. Charakterystyki
mechaniczne silnika klatkowego
zasilanego z falownika napięcia
przy zachowaniu U
s
/f
s
= const
Metoda skalarna U=f(
s
)
Aby uzyskać
stałość momentu
krytycznego SI
w całym zakresie
regulacji częstotliwościowej,
należy tak regulować wartość
napięcia zasilającego uzwojenie
silnika, aby
uzyskać stałość
strumienia skojarzonego w
silniku.
W tym celu, przy niskich
prędkościach obrotowych,
konieczna jest korekcja napięcia
stojana o wartość spadku
napięcia na rezystancji R
s
.
s
U
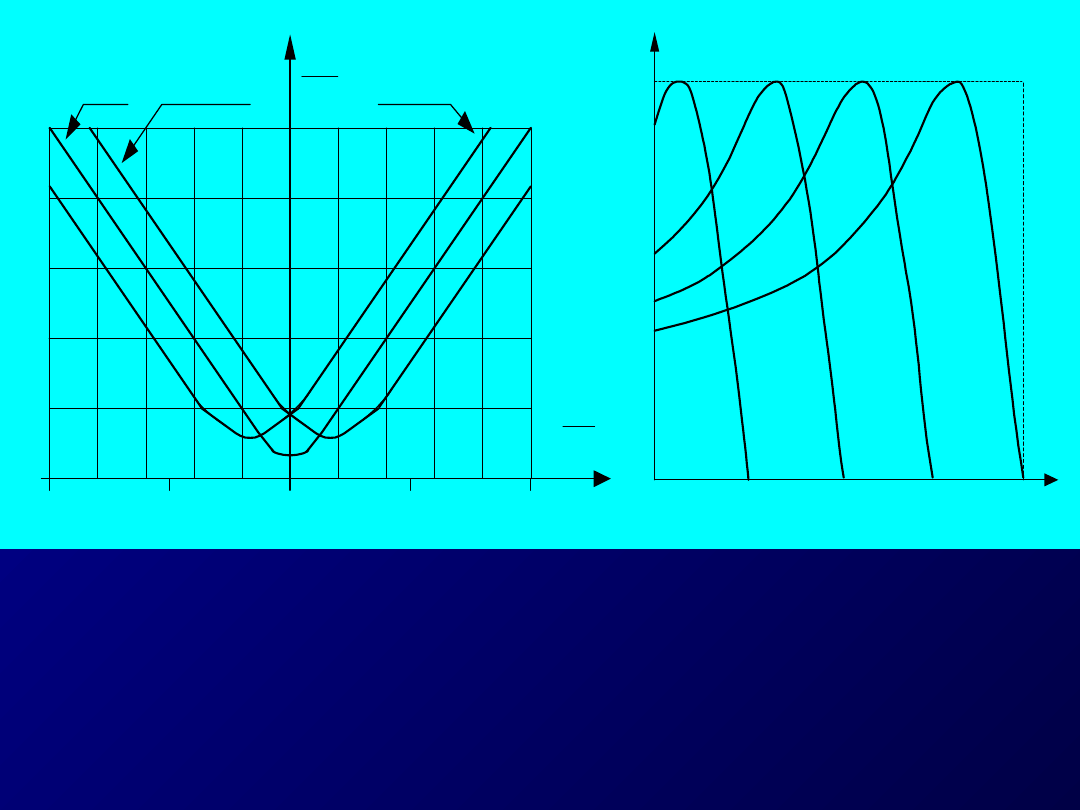
Rys.4 Charakterystyki sterowania przy stałej
wartości strumienia skojarzonego dla
różnych wartości poślizgu s (a)
i odpowiadające im charakterystyki
mechaniczne (b)
0
,1
SN
S
U
U
24
,0
s
24
,0
s
0
s
SN
S
f
f
0
,1
0
5
,0
5
,0
KN
M
M
SN
f
75
,0
SN
f
SN
f
5,
0
SN
f
25
,0
N
0
01
02
03
b)
a)

Metoda skalarna U=f(
s
)
Struktura sterowania u
s
=f(ω
s
,ω
r
)
w otwartym (linia
przerywana – czerw.)
i zamkniętym (linia ciągła) układzie regulacji prędkości SI
Zalety i wady metody U = f(
s
)
•
niezwykle prosta struktura sterowania
• brak kontroli momentu rozwijanego
przez silnik w stanach przejściowych
• brak odsprzężenia dynamicznego między
strumieniem i momentem
• długie, nie kontrolowane stany
przejściowe oraz skłonność do słabo
tłumionych oscylacji momentu i prędkości
•nie w pełni wykorzystane możliwości
dynamiczne silnika i przemiennika
częstotliwości
Wad tych nie posiadają METODY
WEKTOROWE

Metody wektorowe
1.
Metoda polowo-
zorientowana -
polega na
niezależnym sterowaniu
składowymi wektora prądu
stojana zorientowanymi
względem pola SI tak, aby
strumień zachowywał stałą
amplitudę i położenie
względem wektora prądu;
2.
Metoda bezpośredniego
sterowania momentem
silnika
(tzw. sterowanie DTC).

Metody wektorowe
Metody: polowo-
zorientowana i DTC -
doskonałe właściwości
dynamiczne
- stosowane są w napędach
indywidualnych stawiających
wysokie wymagania
dotyczące dynamiki
procesów przejściowych w
układach napędowych.

Zalety sterowania
częstotliwościowego SI
• Płynna regulacja prędkości kątowej
• Szeroki zakres regulacji
• Liniowość charakterystyk mechanicznych
• Możliwość sterowania prędkością
napędów grupowych oraz
indywidualnych
• Wysoka sprawność napędu (wraz z PCz)
• Doskonałe właściwości dynamiczne – w
przypadku sterowania wektorowego!

Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
Wyszukiwarka
Podobne podstrony:
WYKŁAD 14 Regulacja czestotliwosciowa SI
WYKŁAD 15 Regulacja kaskadowa SI
wyklad 14
wyklad 14 15 2010
WYKŁAD 7 Szeregowy regulacja hamowanie
Wyklad 14 2010
Wyklad 14 PES TS ZPE
Wyklad 14
Wykład 14
Wykład 14
patomorfologia wyklad 2 14 10 2011 2
IS wyklad 14 15 01 09 MDW id 22 Nieznany
Wyklad z 14, szkoła
PiK wykład 14 10 16
Mechanika nieba wykład 14
Nauka administracji z elementami teorii zarządzania Wykłady 14 11 2013
Wykład 14 (18.12.07), toxycologia
więcej podobnych podstron