Drgania mechaniczne
Rok II

mgr inż. Piotr Kohut
D1- IV p., p.407
Literatura
1. J. Giergiel „Drgania układów
mechanicznych”
2. J. Giergiel „Zbiór zadań z mechaniki
ogólnej”
3. W. Bogusz „Drgania mechaniczne”
4. Z. Osiński „Teoria drgań”
Program zajęć
1.
(09.10)
RDR*
2.
(23.10)
Kol. (RDR)
+ drgania nietłumione s/w**
układów o 1DOF***
3.
(06.11)
Drgania tłumione s/w układów o 1 DOF
4.
(20.11)
Laboratorium (układy z/bez tłumienia o 1 DOF)
5.
(04.12)
Kol.(układy o 1 DOF)
6
. (18.12)
Wibroizolacja
7.
(09.01)
Kol. (wibroizolacja)
8.
(23.01)
Zaliczenia
* równania dynamiczne ruchu
* * swobodne/wymuszone
*** stopień swobody

Równania dynamiczne
ruchu
1. Metoda Newtona
–
Ruch postępowy
–
Ruch obrotowy
–
Ruch płaski
2. Równania Lagrange’a II
rodzaju
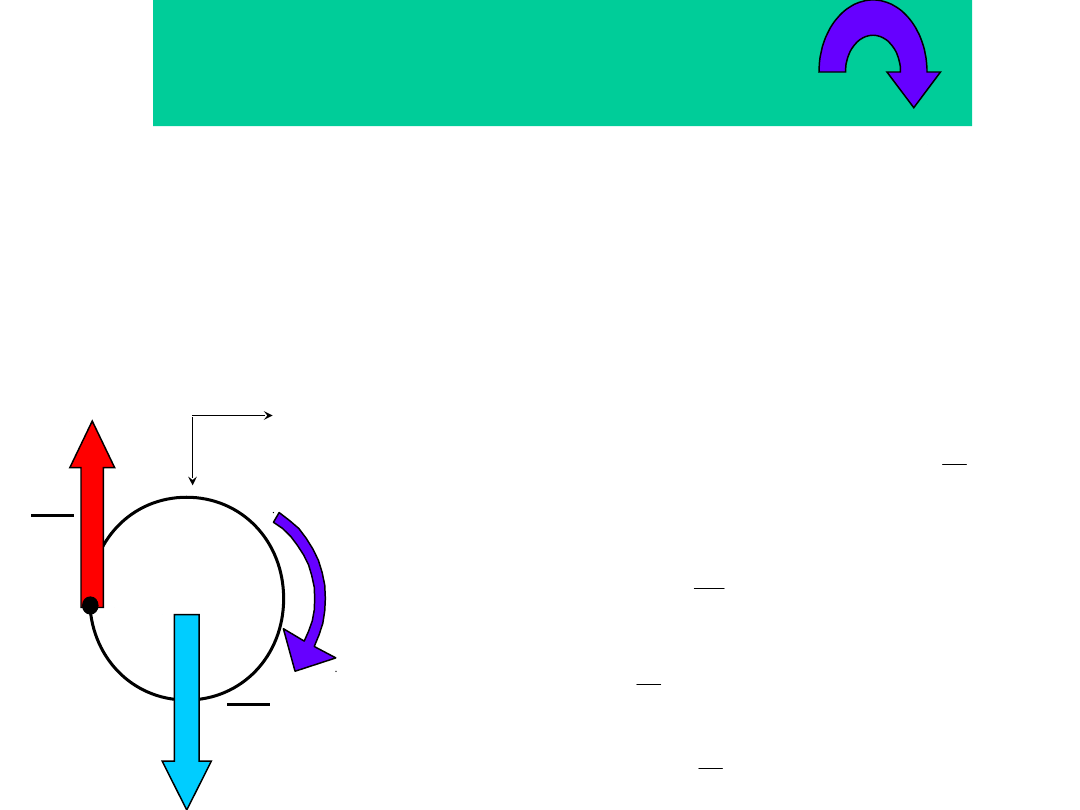
Zagadnienia
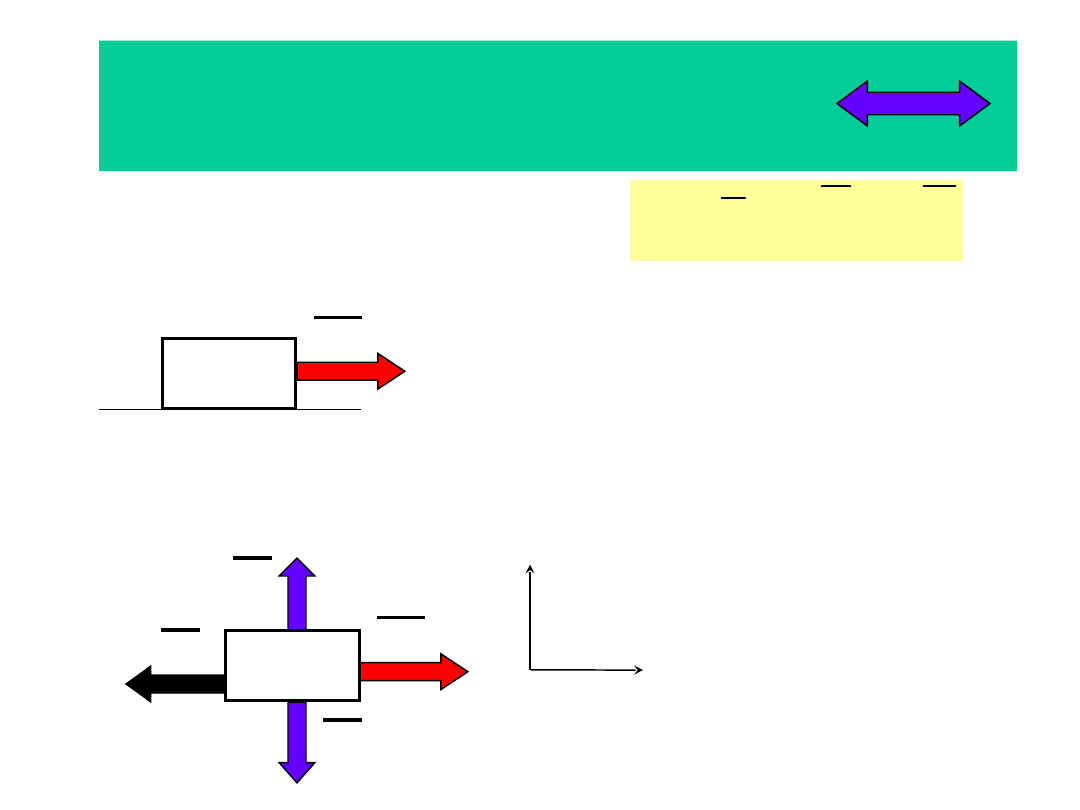
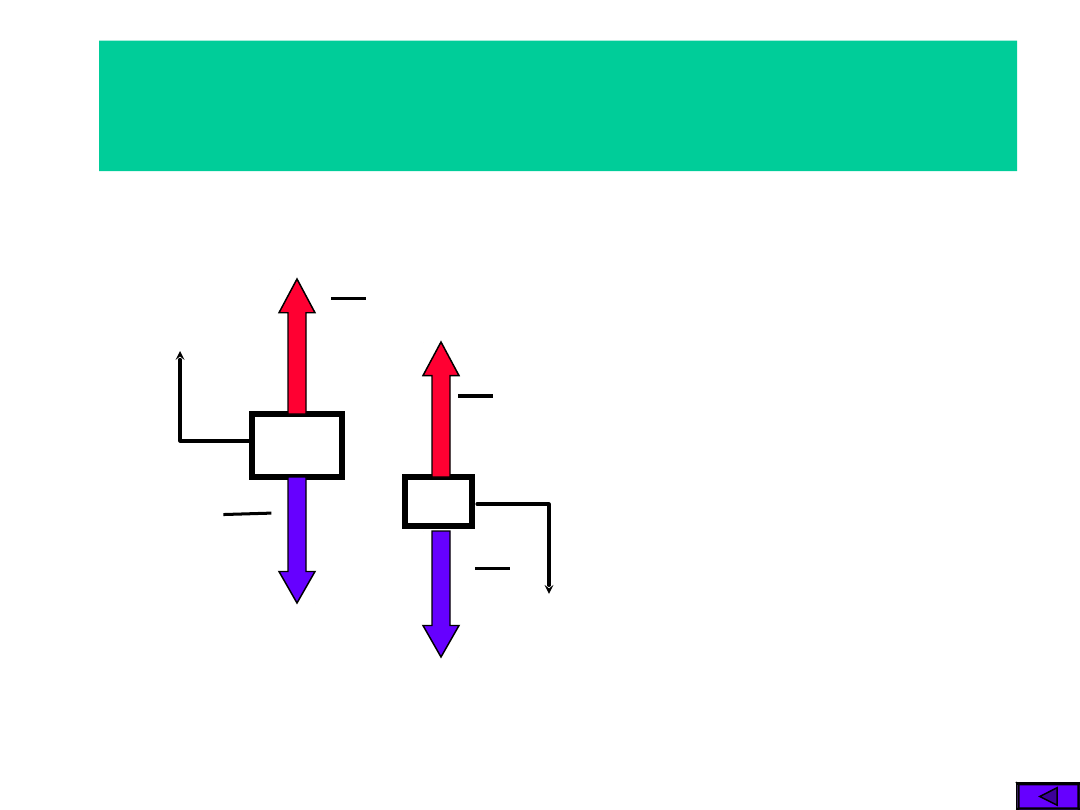
Metoda Newtona
R
P
a
m
.
1
m
P
1. Ruch postępowy
z
R
z
P
z
m
.
y
R
y
P
y
m
.
x
R
x
P
x
m
.
4
3
2
1.1. Oswobodzenie
układu
m
P
T
G
N
x
y
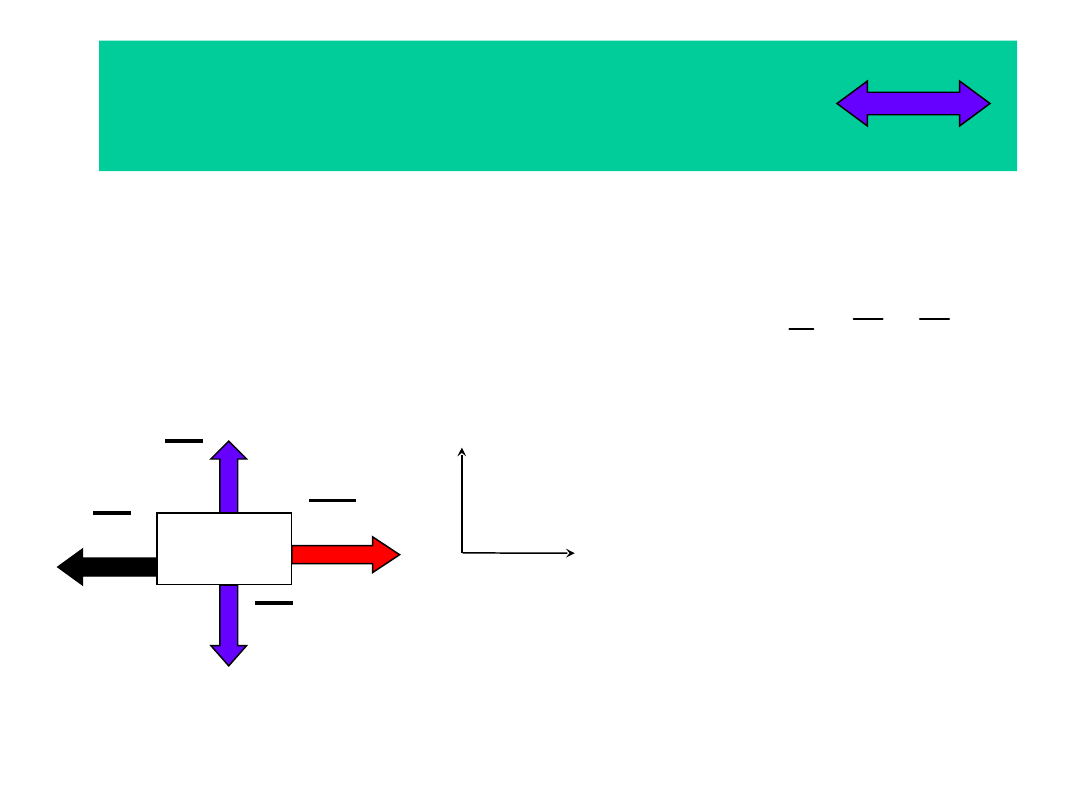
Metoda Newtona
1.2. Równania dynamiczne ruchu w
kierunku osi 0X, 0Y
N
T
.
G
N
y
m
.
T
P
x
m
.
8
0
7
6
m
P
T
G
N
x
y
T
P
a
m
.
5
G
P
x
m
.
9
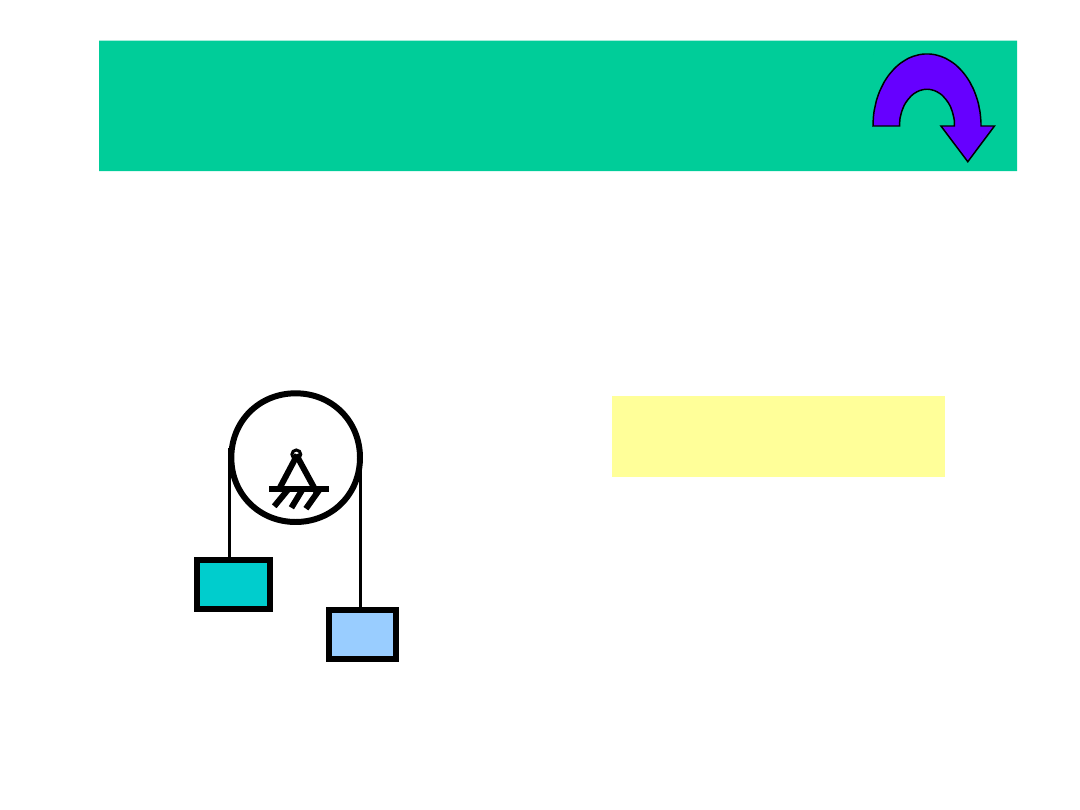
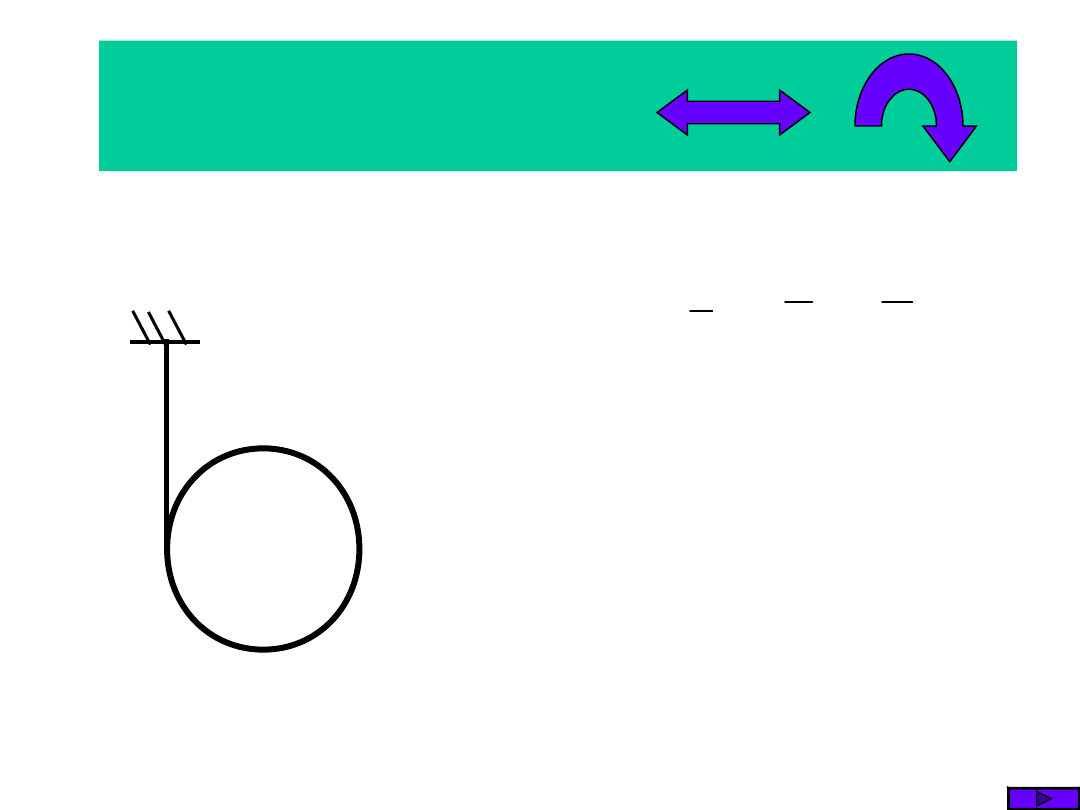
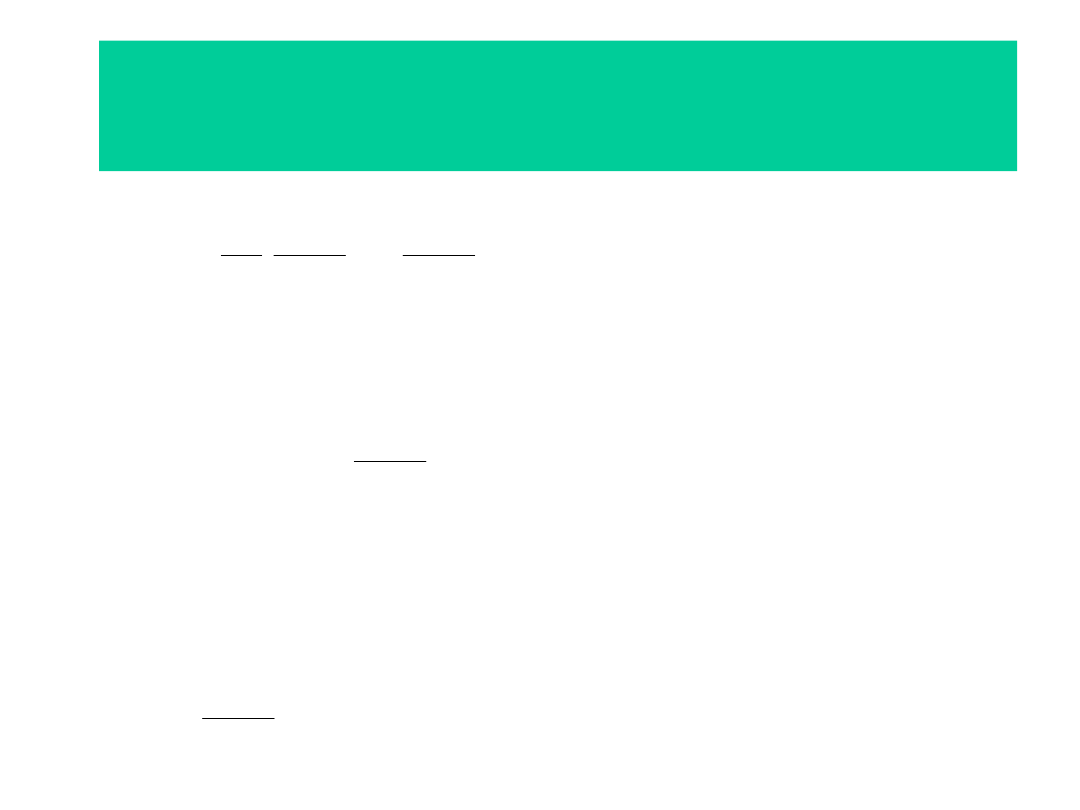
Metoda Newtona
2. Ruch obrotowy
o
M
o
J
.
.
1
2
m
m1
2m,
r
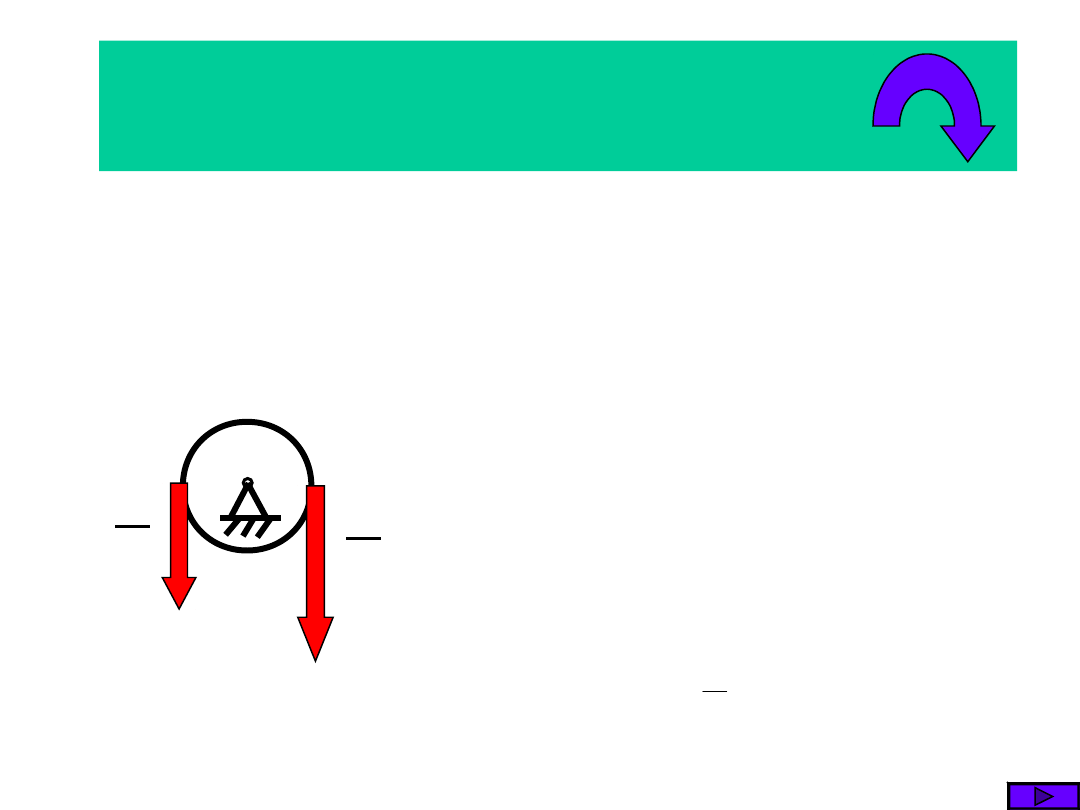
Metoda Newtona
2.1. Oswobodzenie
układu
2m,
r
S
S
1
2.2. Równanie dyn.
ruchu
w ruchu obrotowym
2
2
2
1
2
2
1
1
2
r
*
m
o
J
.
.
r
*
S
r
*
S
o
J
.
.
Metoda Newtona
m
S
G
x
m1
S
1
G
1
x
1
1
1
4
2
3
2
G
S
x
m
.
.
S
G
x
m
.
.
(2.4), (2.3) --> (2.1)
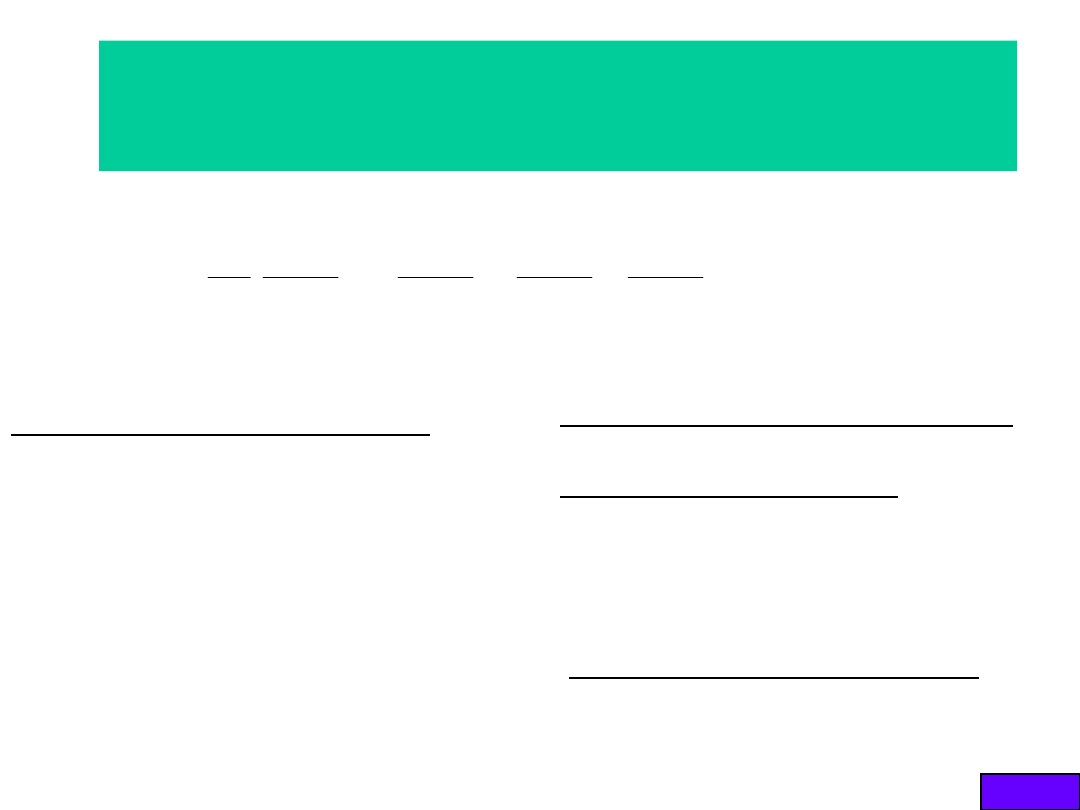
Metoda Newtona
3. Ruch płaski
z
R
z
P
z
m
y
R
y
P
y
m
x
R
x
P
x
m
R
P
a
m
o
M
o
J
o
m, r
Ruch postępowy
Ruch obrotowy
Sz:
a
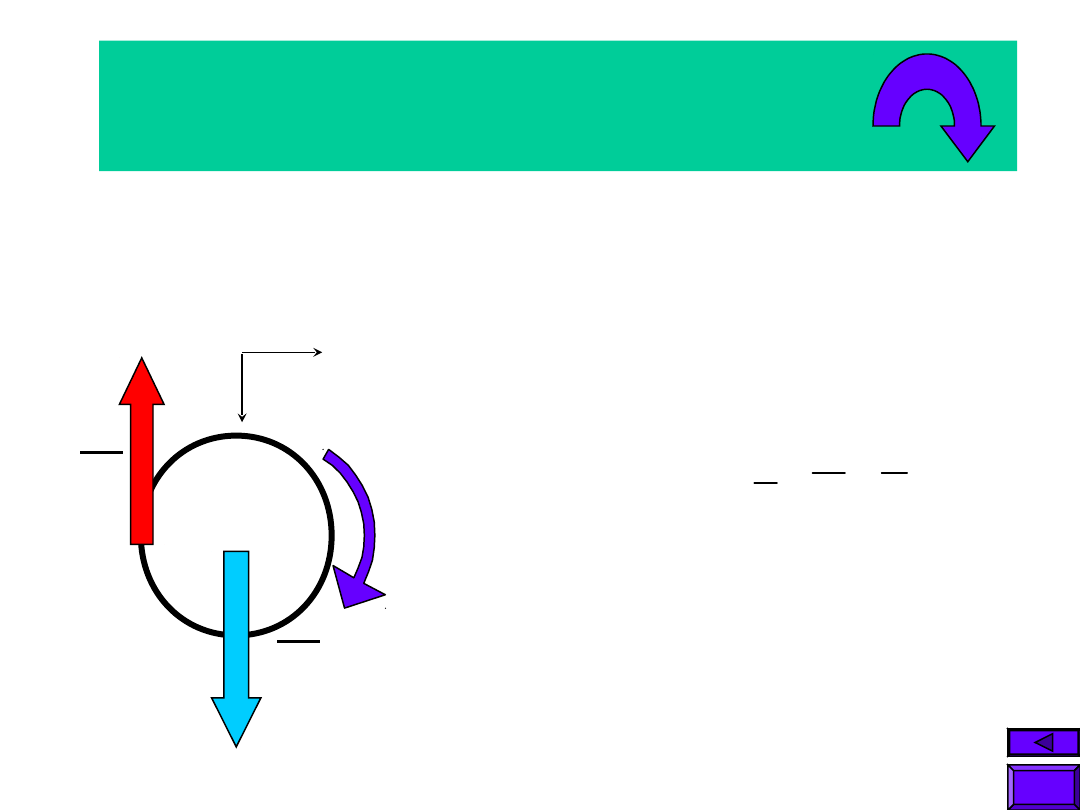
Metoda Newtona
3.1.
Oswobodzenie
układu
3.1.1. RDR w
ruchu
postępowym
0
3
3
2
3
1
3
y
m
.
.
S
G
x
m
.
.
S
G
a
m
.
.
o
S
G
x
y
O
Metoda Newtona
(3.5) -->
(3.2)
3.1.2. RDR w ruchu
obrotowym
r
x
.
.
r
*
S
o
J
.
.
o
M
o
J
.
.
6
3
5
3
4
3
Metoda Newtona
3.1.3. RDR w ruchu obrotowym wzgl.
chwilowego środka obrotu - pkt.c
o
S
G
x
y
c
g
x
.
.
mg
x
m
.
.
r
x
.
.
r
*
m
r
*
m
o
J
c
J
.
.
r
*
G
c
J
.
.
3
2
15
3
2
3
14
3
13
3
2
2
3
2
12
3
11
3
c
M
c
J
.
.
10
3
Równania Lagrange,a II
rodzaju
j
q
D
.
j
q
V
jp
Q
.
.
d
E
3
4
2
4
nia).
(rozprasza
dyssypacji
Energia
.
1..s
j
1
4
j
Q
jp
Q
j
q
E
j
q
E
dt
d
.
.
j
Q
j
q
D
j
q
V
j
q
E
j
q
E
dt
d
.
.
4
4
Równania Lagrange’a II
rodzaju
Energia kinetyczna
E
E = E
p
+ E
0
E
p
= ½ mv
2
E
o
= ½ J
o
2
Energia potencjalna
sił sprężystości
V
V = ½ kx
2
Energia dyssypacji
D
D = ½ cv
2
Rozwiąz
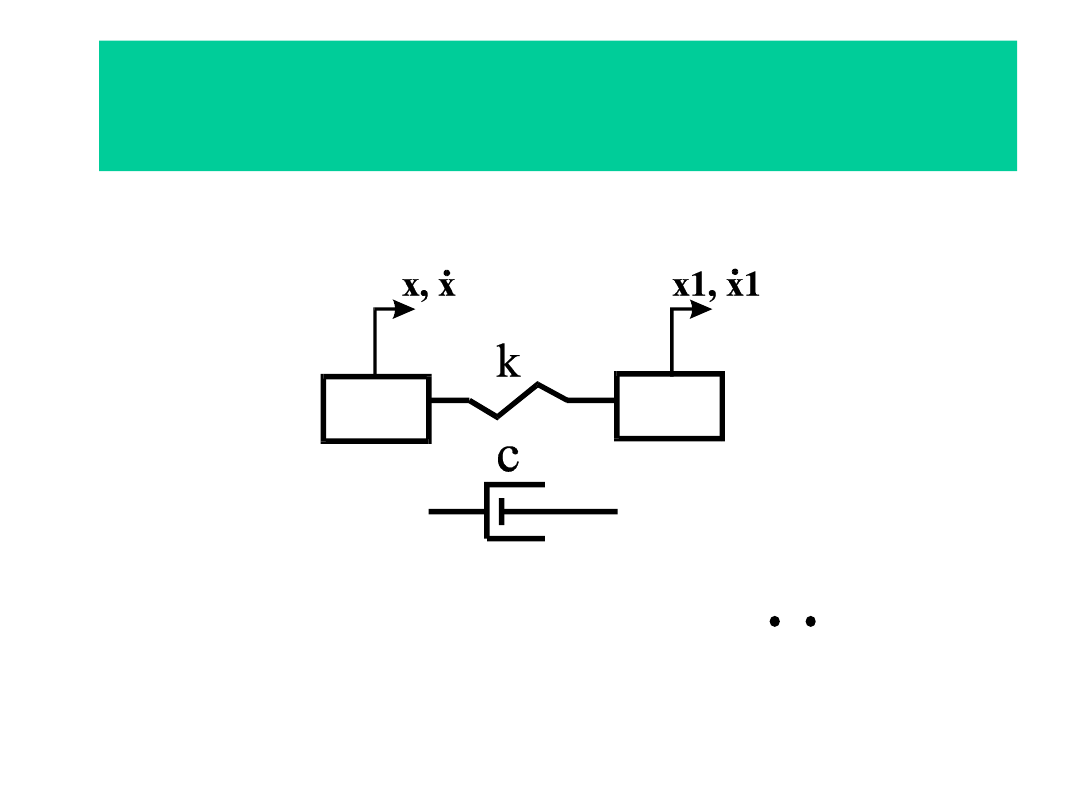
Równania Lagrange’a II
rodzaju
m
m 1
D = ½ c(x-x1)
2
V = ½ k(x-x1)
2
j
s
1
j
j
i
i
,
j
s
1
j
j
i
z
i
z
,
j
s
1
j
j
i
y
i
y
,
j
s
1
j
j
i
x
i
x
q
q
q
q
q
q
q
q
4.7.
Więzy skleronomiczne holonomiczne
(więzy geometryczne nie zależą jawnie od
czasu)
s
1
=
j
n
1
i
n
1
i
zi
iz
P
yi
iy
P
xi
ix
P
L
j
q
j
i
i
Q
M
4.5.
1..s
=
j
n
1
i
j
i
z
iz
P
j
i
y
iy
P
j
i
x
ix
P
j
Q
q
q
q
4.6.
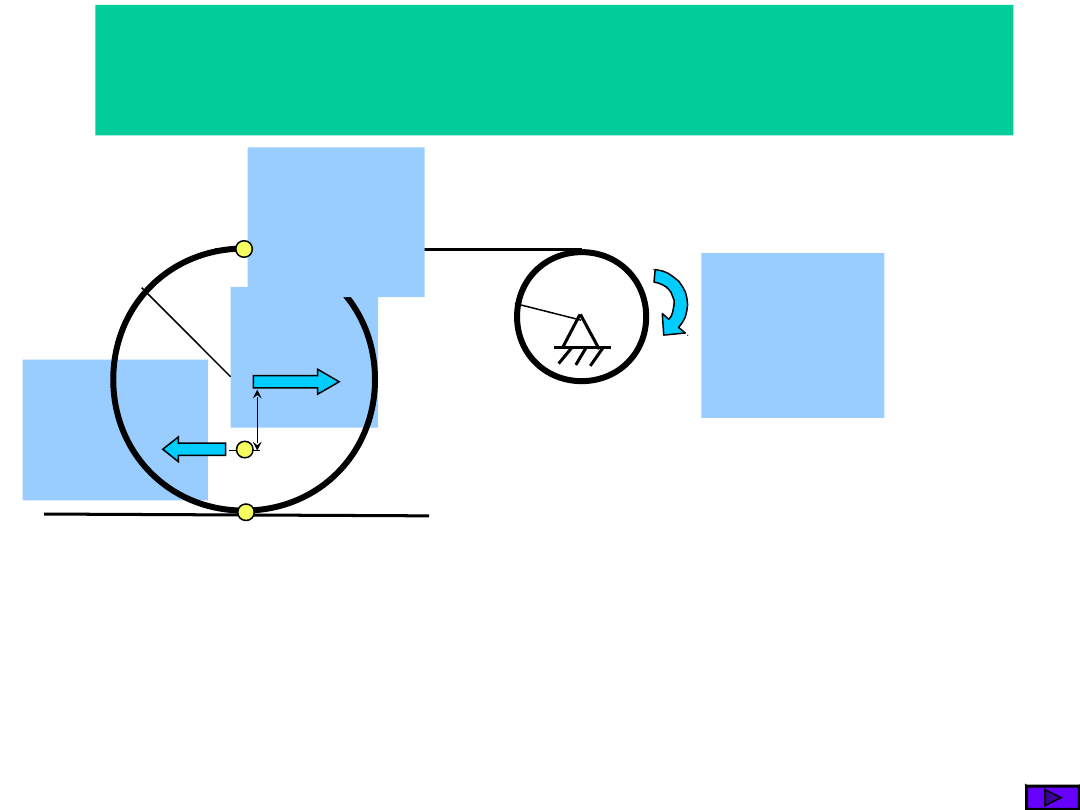
Prace przygotowane
Przesunięcie możliwe -zgodne z więzami
Prędkość możliwa - zgodna z więzami
s v
Przesunięcia
przygotowane
A
V,
s
V
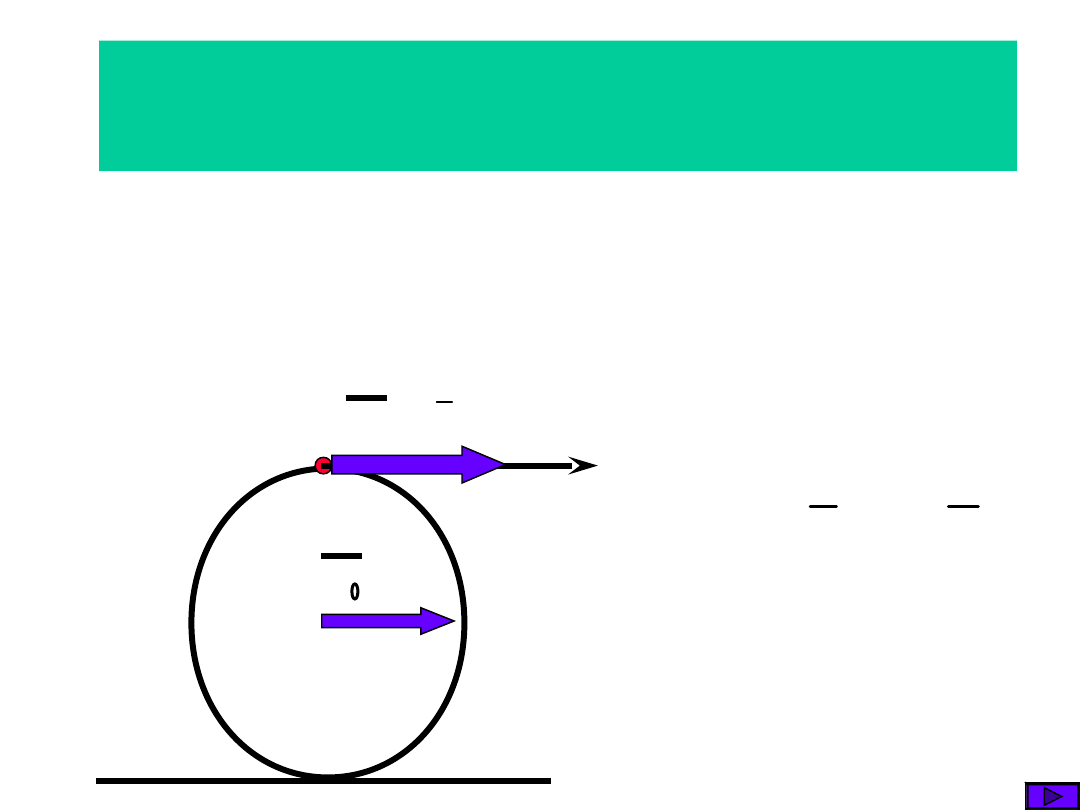
Przesunięcie
przygotowane
Przesunięcie proporcjonalne do
prędkości możliwych w pkt. A nazywamy
przesunięciami przygotowanymi lub
wirtualnymi w tym punkcie
Przesunięcia przygotowane mają
kierunek styczny do powierzchni, zwrot
zaś i wielkość dowolną
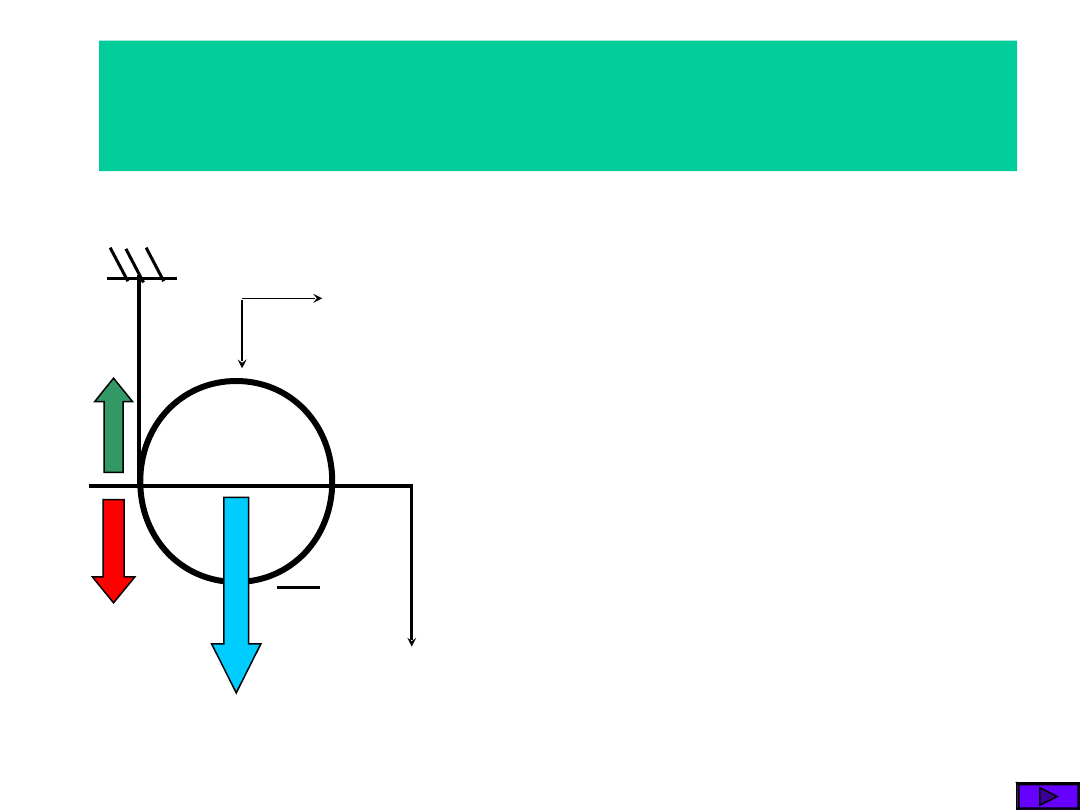
x
D
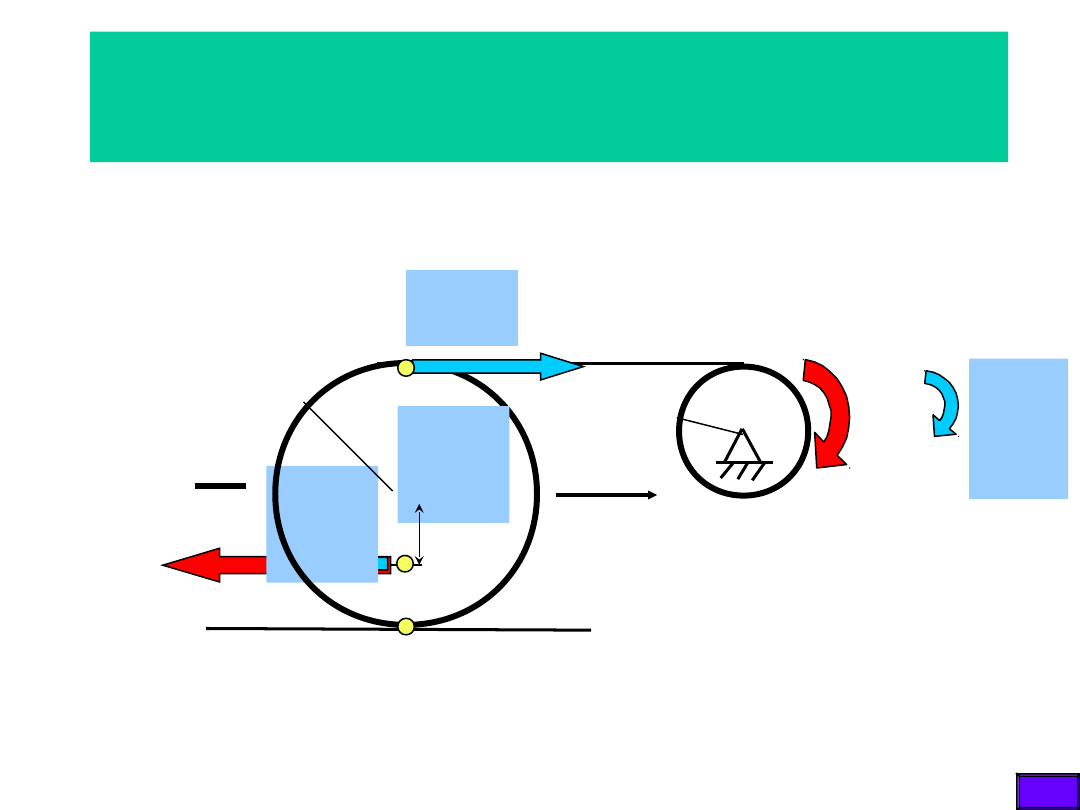
Przesunięcia
przygotowane
o
c
x
0
a
R
r
M
D
E
P
x
E
x
v
Q
J
X
Przesunięcia
przygotowane
x
D
v
D
x
0
v
0
o
c
a
R
x
E
v
E
r
D
E
(4.8)
(4.9)
x
D
vD
x
v
0
0
(4.10)
(4.11)
x
E
vE
x
E
r
*
Przesunięcia
przygotowane
Prędkości
Przesunięcia przygotowane
(4.12)
(4.13)
vD
R a
R
v
vE v
0
2 0
0
2
(4.15)
0
(4.14)
x
E
x
x
R
a
R
D
x
Siła uogólniona
Przesunięcia
przygotowane
2
(4.18)
*
M
R
a
R
*
P
Q
0
2
0
(4.17)
x
*
M
R
a
R
*
P
x
*
Q
*
M
D
x
*
P
x
*
Q
0
(4.16)
Równania Lagrange’a II
rodzaju
x
q
j
q
Współrzędna uogólniona
Ilość stopni swobody
s=1
o
G
x
y
+
_
0
x
4.19. E
k
= E
p
+E
o
r
x
.
.
mr
o
J
.
.
o
J
o
E
.
.
x
m
p
E
.
.
23
4
2
2
1
22
4
2
2
1
21
4
2
2
1
20
4
x
*
G
V
.
.
25
4
m
x
k
E
.
.
2
3
2
2
1
24
4
Równania Lagrange’a II
rodzaju
g
x
.
.
G
x
m
.
.
3
2
31
4
0
2
3
30
4
Równania Lagrange’a II
rodzaju
G
x
V
.
.
x
k
E
.
.
28
4
0
27
4
Równ.
m
x
m
x
x
k
E
.
.
2
3
2
3
dt
d
dt
d
26
4
0
29
4
j
Q
.
.
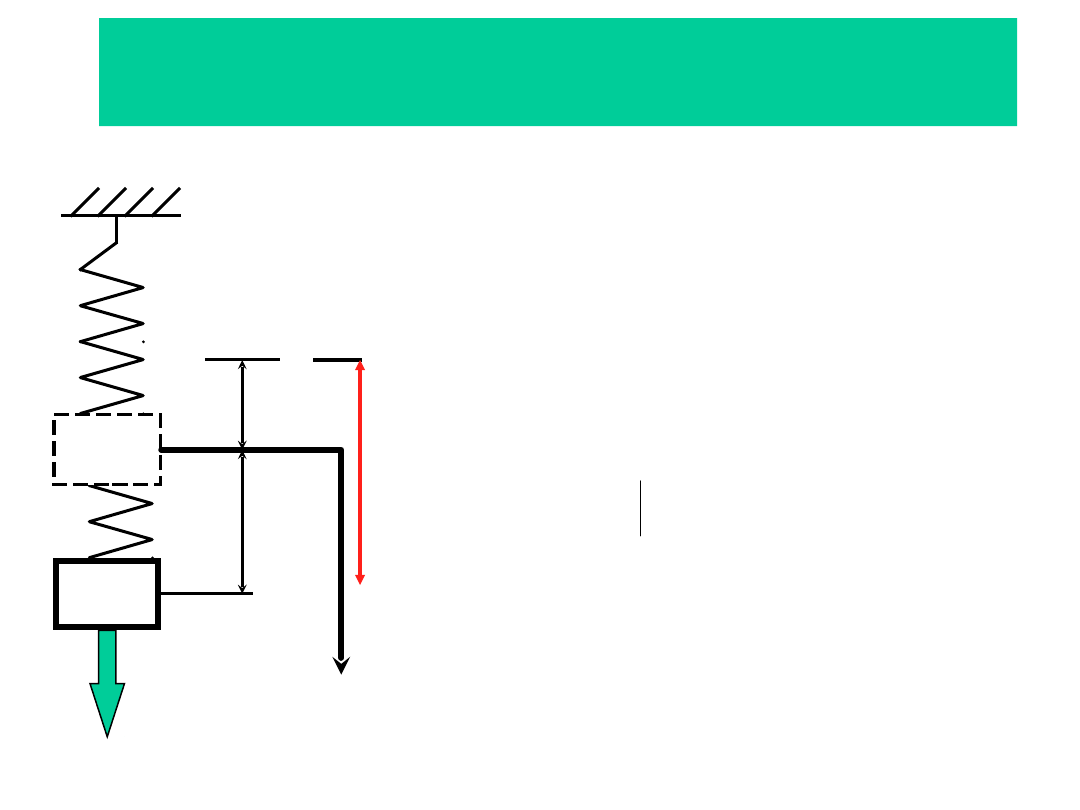
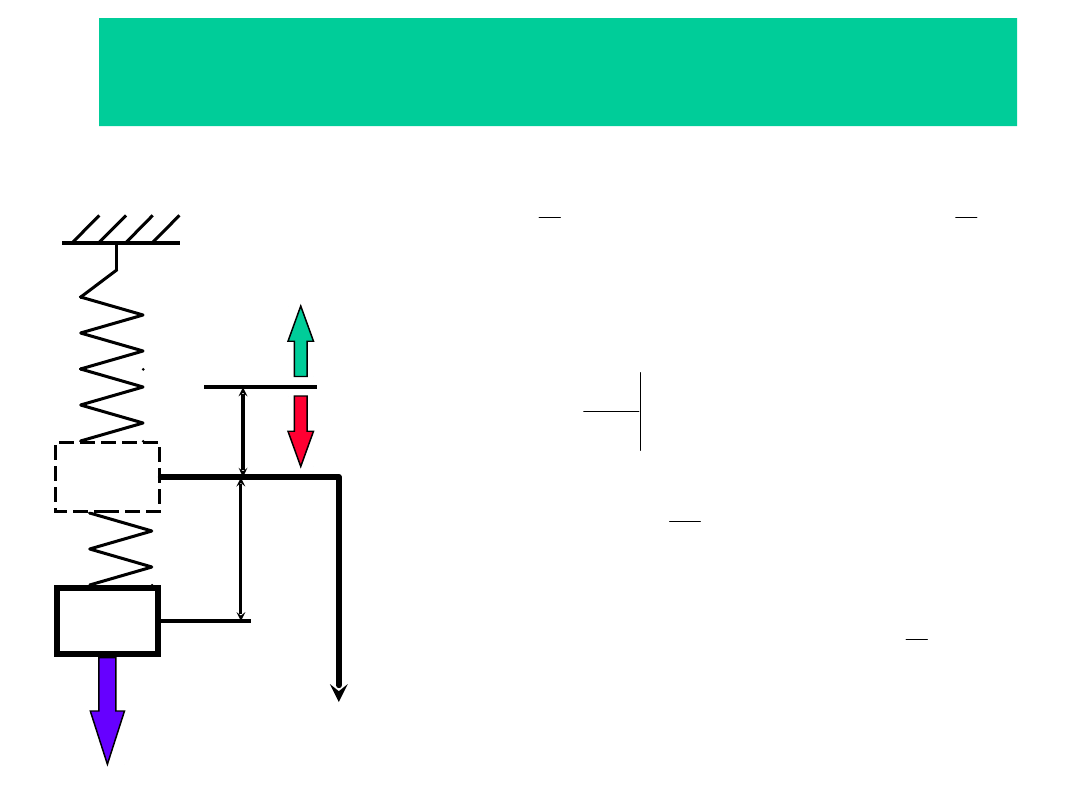
Ugięcie statyczne
0
4
5
0
3
5
kx
x
m
.
.
st
k
G
x
s
F
.
.
st
x
k
s
F
.
.
s
F
G
x
m
.
.
2
5
1
5
x=
0
m
m
k
G=mg
x
x
st
A
x+
s
t
k
G
st
.
.
G
st
k
x
x
V
.
.
7
5
0
0
0
6
5
2
2
1
2
2
1
5
5
st
k
st
x
G
st
x
k
V
.
.
2
2
1
8
5
(5.5)
(5.7)
kx
V
.
.
m
m
k
G=mg
x
x
x=0
st
A
Ugięcie statyczne
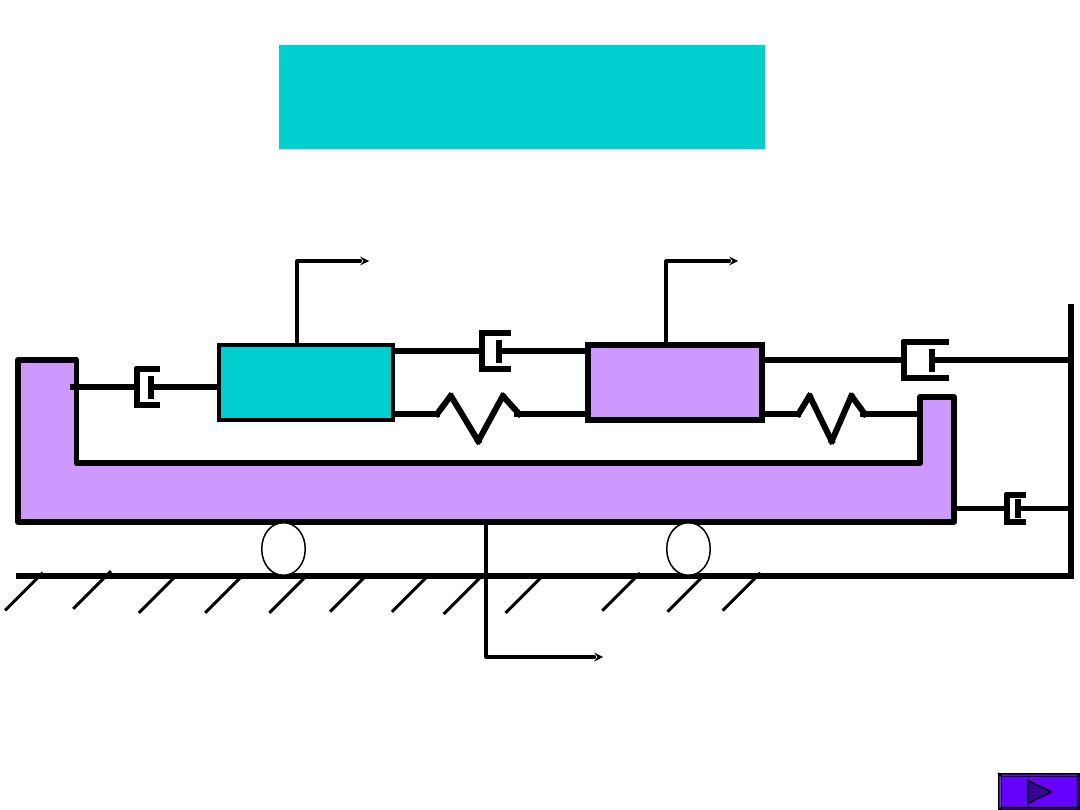
Zadanie 1
m1
m2
m3
k1
k2
c1
c2
c4
c3
x1
x3
x2
D: m1- m3, k1, k2, c1-c4
Sz: RDR
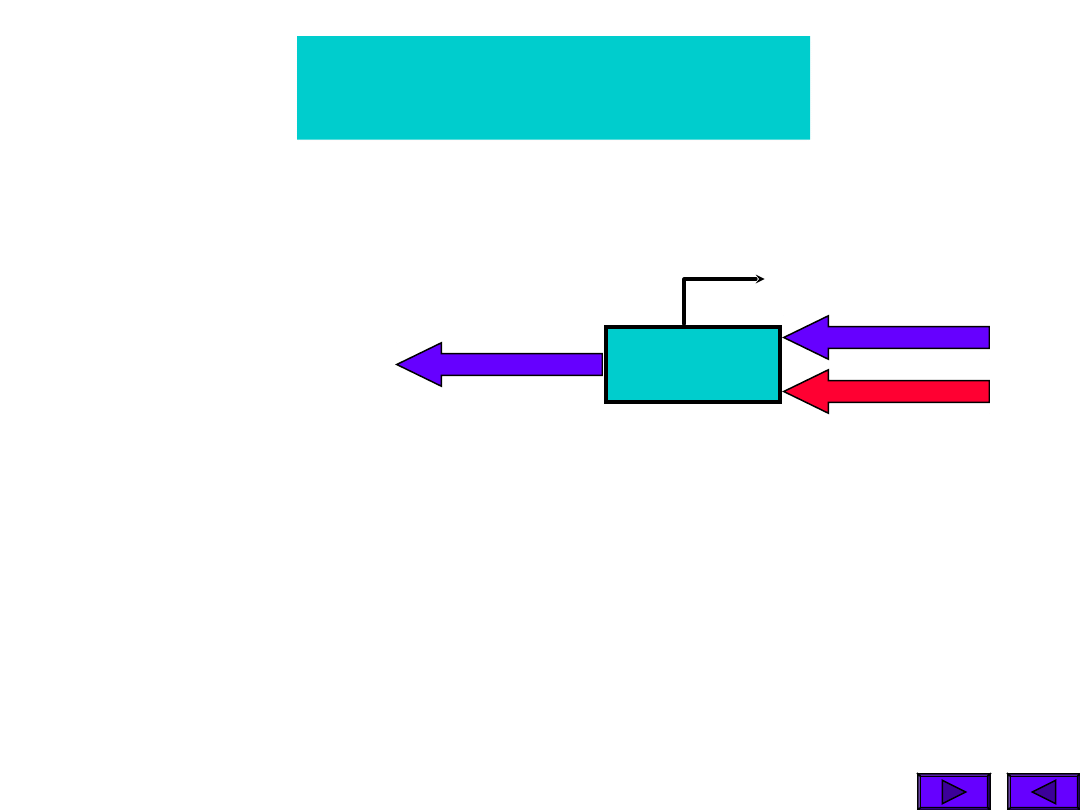
Masa m1
m1
x1
Fc
1
Fs
1
Fc
3
1. Oswobodzenie układu
2. RDR masy m1
3
1
1
1
1
(1)
c
F
s
F
c
F
x
m
(3) Fc c x x
1 1 1 2
(2) Fs k x x
1
1 1 2
Masa m1
(5) m x c x
x
c x
x
k x
x
1 1 1 1 2 3 1 3 1 1 2 0
(4) Fc c x x
3 3 1 3
(6) m x
c c x k x c x c x
k x
1 1
1 3 1 1 1 1 2 3 3 1 2
0
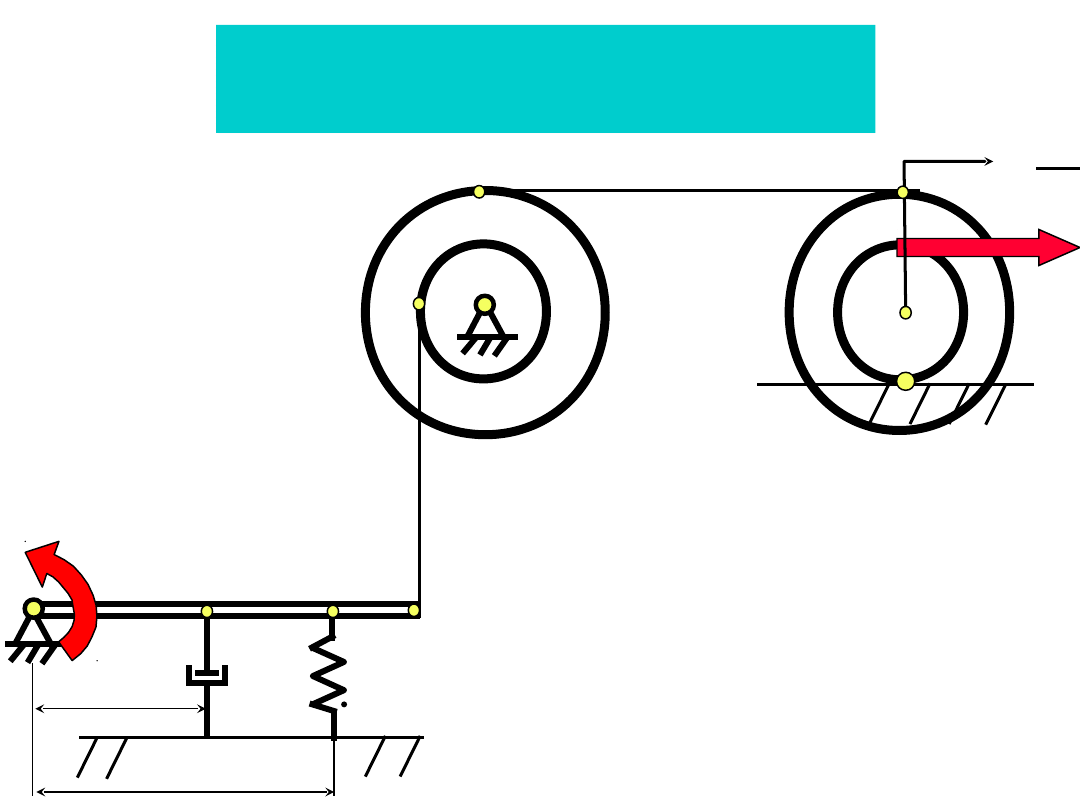
Zadanie 3
Sz: RDR ciała o masie
3m
M
c
k
r
4m, 2r
3/2 r
2m, 2r, r,
3m, 2r, r,
P
x
O
2
A
B
E
E
’
O
1
F
F
’
O
D
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 35
Wyszukiwarka
Podobne podstrony:
dynamikawyklad13, Wykład 13
Dynamika Wykłady Część teoretyczna
Pozycjonowanie dynamiczne wykład
Mechanika - Dynamika, dynamikawyklad8, wykład 8
uklady1, 2 ROK, 3ci SEMESTR, Modele ukladow dynamicznych, wyklad
Mechanika - Dynamika, dynamikawyklad11, WYKŁAD 11
Ostatni wykład z Dynamiki
Dynamika Budowli wyklad 4 2011 12
Dynamika zmian rozwojowych oraz podejścia?dawcze w psych rozwoju wykład 2 3
Badania Operacyjne UW, wykład 3 produkcja-zapasy, Programowanie dynamiczne
antropologia Wykład 2. DYNAMIKA ZJAWISK KULTURY; KULTURA I OSOBOWOŚĆ – WZAJEMNE RELACJE
Wyklad 10 Dynamika MS
Wyklad 08 Dynamika MS
Wyklad 08 Dynamika MS
Wyklad 09 Dynamika MS
wyklad5, DYNAMIKA PŁYNÓW RZECZYWISTYCH
Mechanika - Dynamika, dynamikawyklad10, Zasady ruchu dla punktu materialnego Wykład 10
więcej podobnych podstron