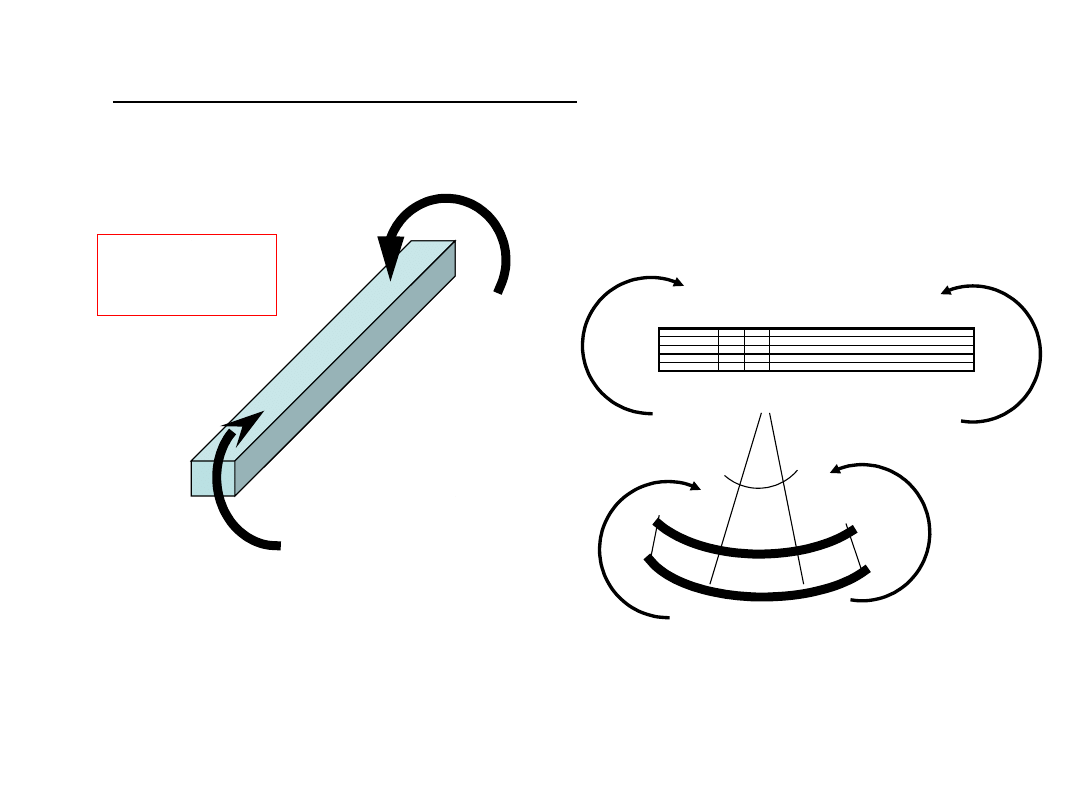
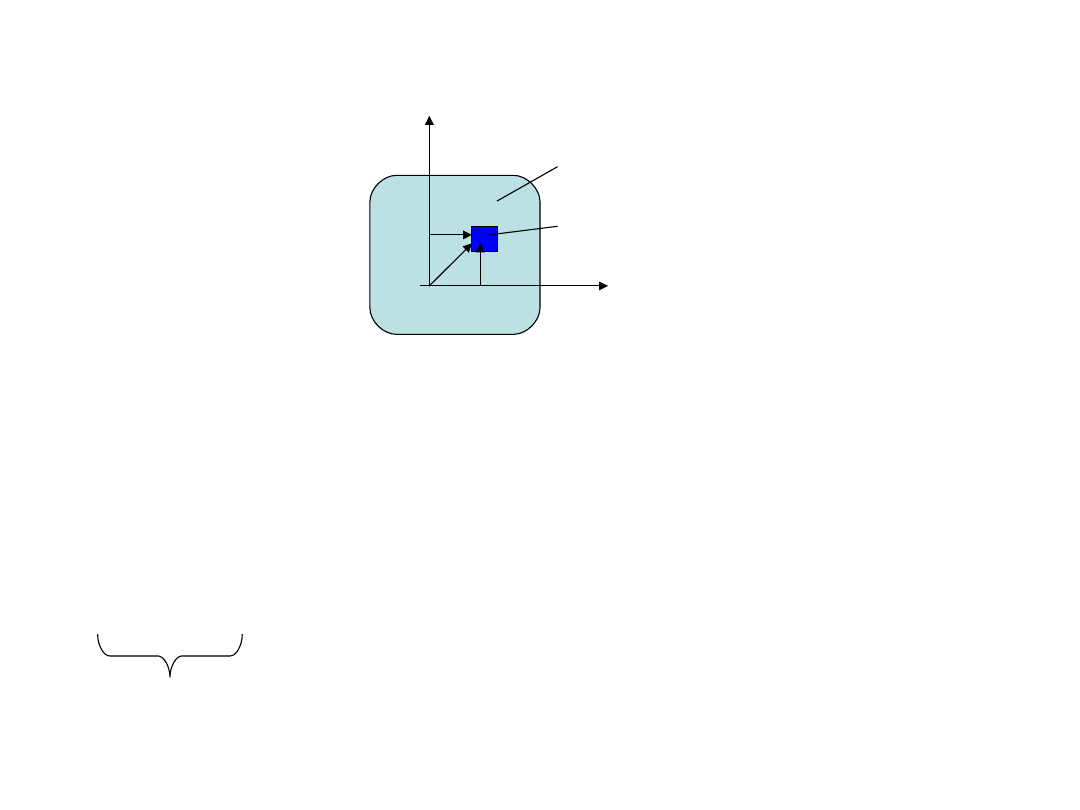
Naprężenia przy czystym zginaniu
M
g
M
g
T=0
M
g
=const.
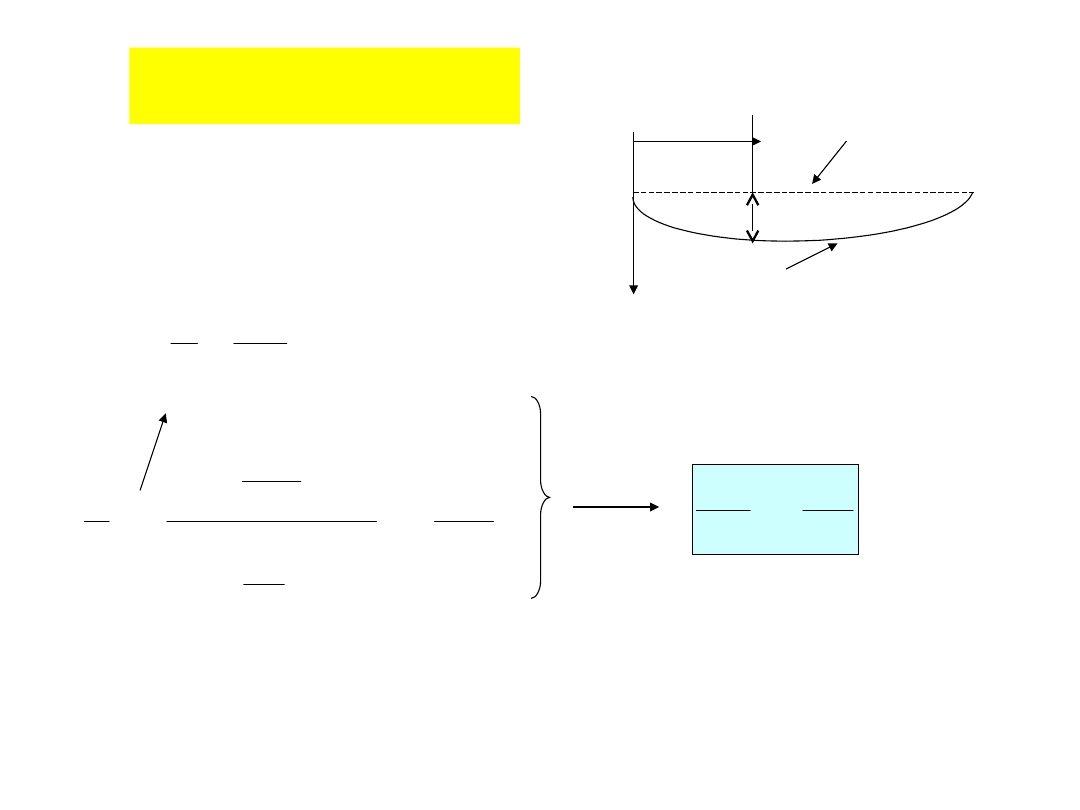
Założenia:
-Przekroje poprzeczne pozostają płaskie,
- Warstwy nie oddziałują na siebie wzajemnie,
-Warstwy poddane są jedynie rozciąganiu bądź ściskaniu (jednokierunkowy stan
naprężenia).
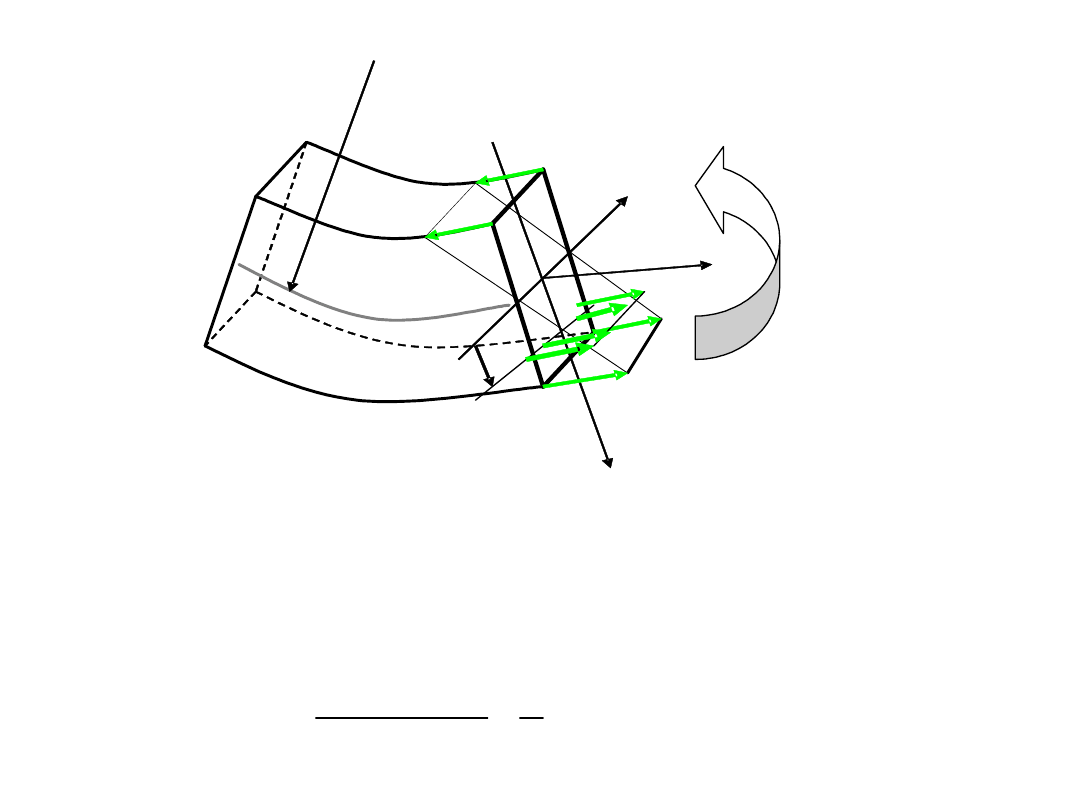
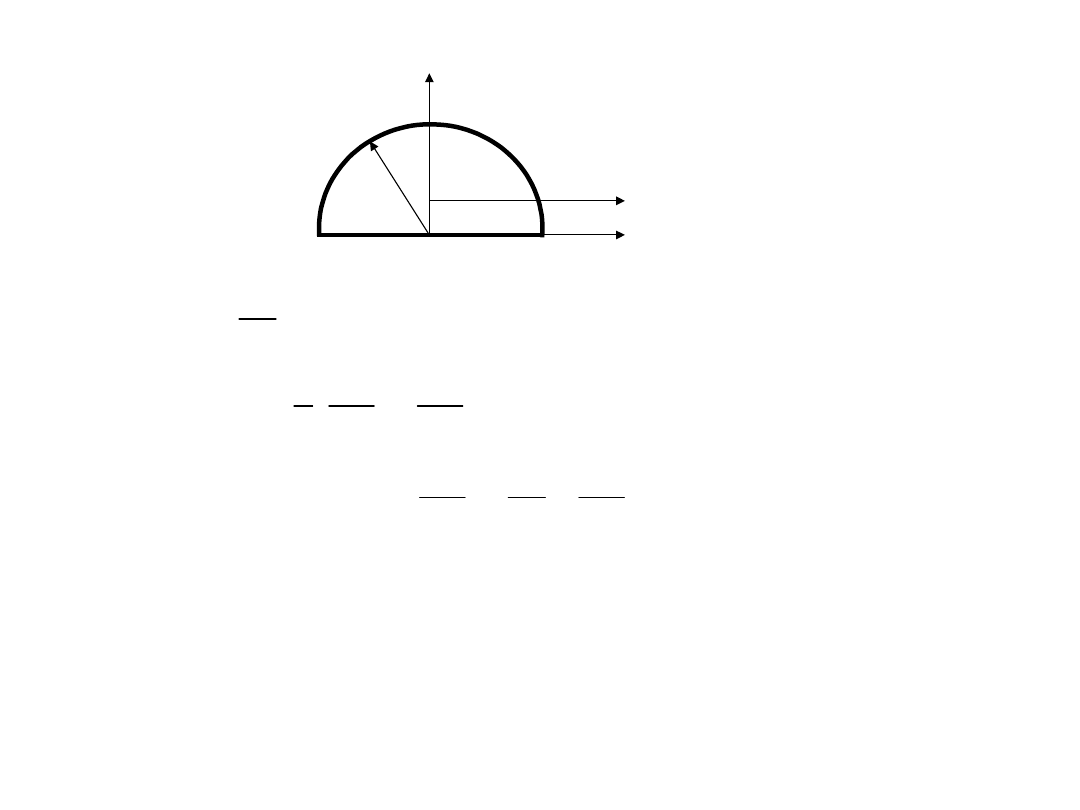
x
z
y
y
M
g
- promień krzywizny warstwy obojętnej
)
(
)
(
y
E
y
x
x
;
)
(
)
(
y
y
y
x
Wydłużenie warstwy odległej o y od warstwy obojętnej
)
(
)
(
)
(
y
y
y
x
z
y
;
)
(
y
E
y
x
z
y
y
y
x
dy
dA
M
g
x
=E
b
h/2
A
A
x
ix
ydA
E
dA
F
0
0
Warstwa obojętna zawiera środek
ciężkości
przekroju poprzecznego (Oz=Oz
c
)
Warunki równowagi
A
g
2
A
g
x
iz
M
dA
y
E
;
0
M
dA
y
M
A
A
x
iy
;
0
ydA
z
E
;
0
dA
z
M
E=const., =const.
;
I
ydA
z
;
I
dA
y
A
z
y
A
z
2
C
C
C
Moment bezwładności przekroju
poprzecznego względem osi z
c
Moment bezwładności przekroju
poprzecznegowzględem układu
osi y
c
z
c
Wprowadzając oznaczenia
Mamy:
;
0
I
E
;
M
I
E
C
C
C
z
y
g
z
;
0
I
C
C
z
y
;
)
(
y
E
y
x
;
)
(
y
I
M
y
C
z
g
x
z
g
max
z
g
max
W
M
y
J
M
C
max
y
J
W
zc
z
Wskaźnik przekroju
2
2
2
/
3
2
2
2
dx
w
d
dx
dw
1
dx
w
d
1
z
g
J
M
E
z
g
2
2
EJ
M
dx
w
d
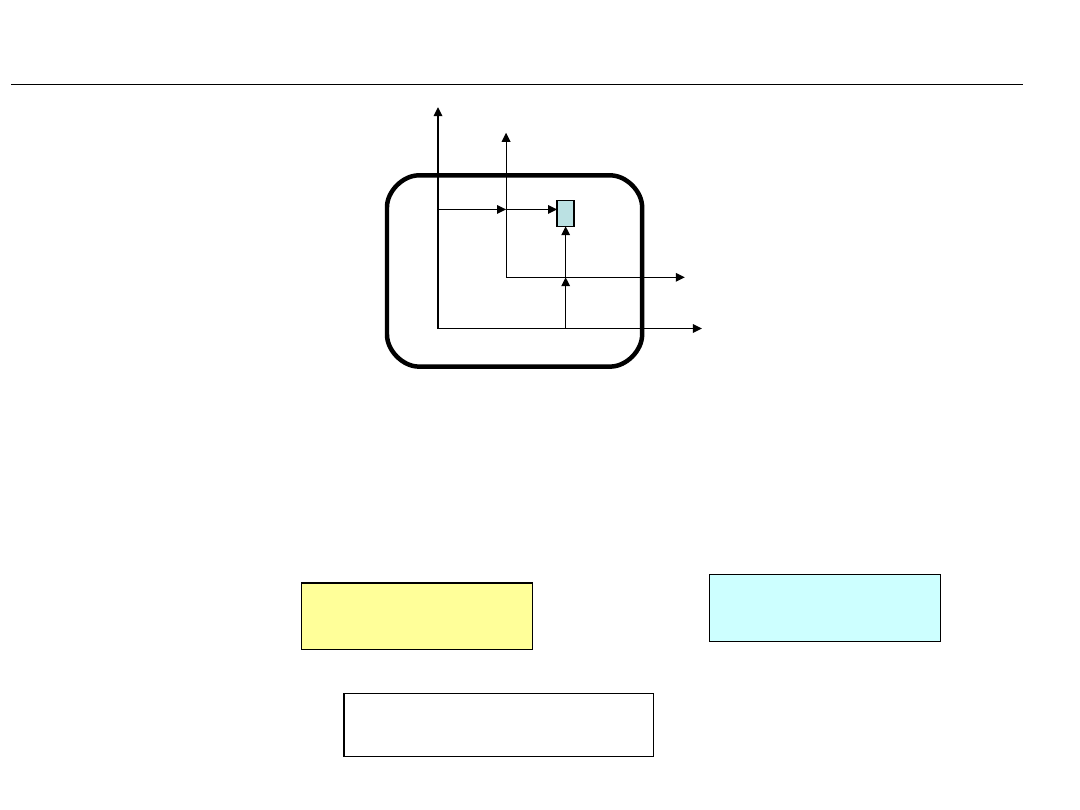
w – przemieszczenie warstwy obojętnej
Równanie różniczkowe linii
ugięcia
w
x
w(x)
nieodkształcona warstwa
obojętna
Warstwa obojętna
po odkształceniu
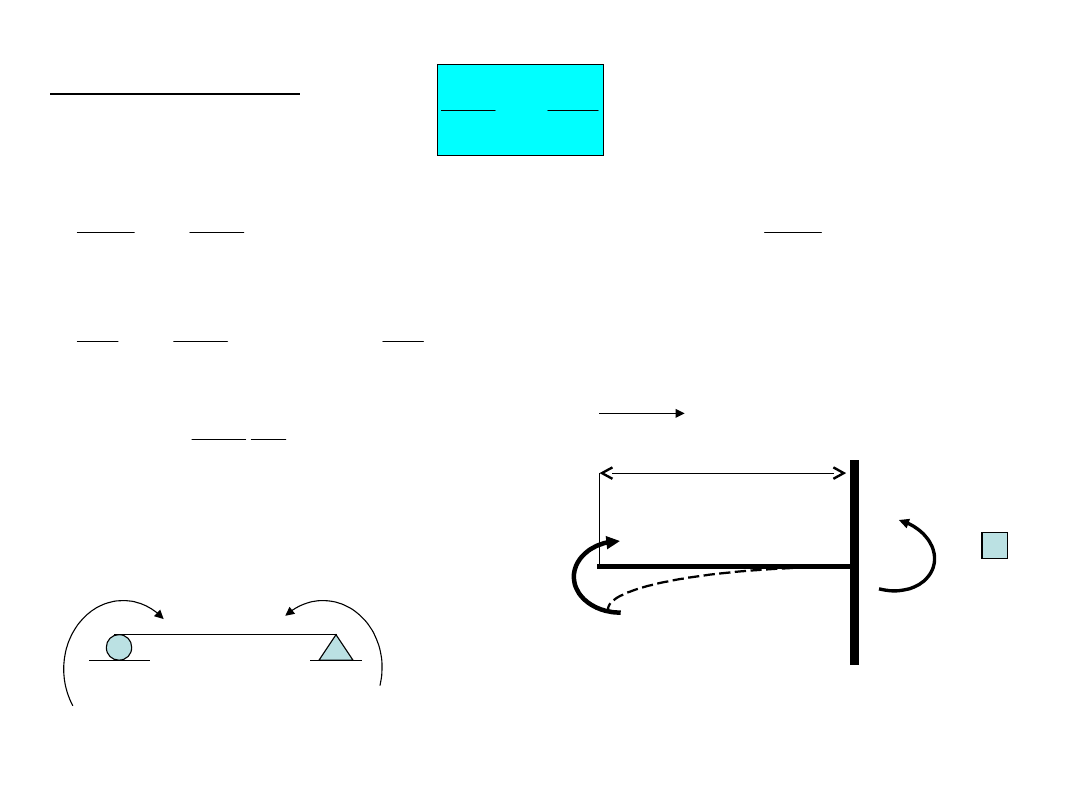
Warunki brzegowe
z
g
2
2
EJ
M
dx
w
d
''
.
.
;
2
2
2
2
w
dx
w
d
const
EJ
const
M
EJ
M
dx
w
d
z
g
z
g
;
2
)
(
'
;
2
1
2
1
C
x
C
x
EJ
M
x
w
w
dx
dw
C
x
EJ
M
dx
dw
z
g
z
g
C
1
i C
2
– stałe całkowania
x
M
u
l
x=l w(l)=0
x=l w’(l)=0
M
g
M
g
M
g
x=0 w(0)=0
x=l w(l)=0
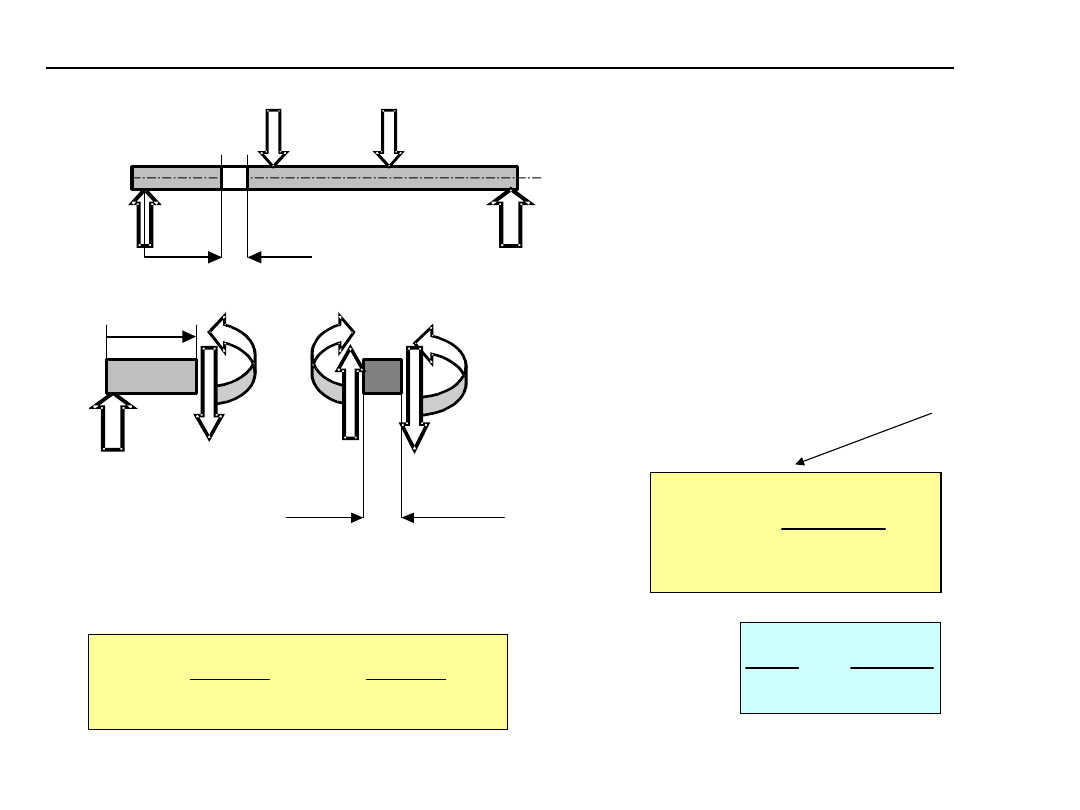
Naprężenia od zginania w belkach obciążonych poprzecznie
dx
x
dx
T
x
+dT
x
T
x
M
gx
R
1
M
g
+dM
gx
R
2
P
1
T
x
P
2
x
R
1
a)
.
;
0
const
M
T
g
x
;
)
(
)
(
y
I
x
M
y
C
z
g
x
Uogólnienie wzorów wyprowadzonych
dla czystego zginania
gdy k
r
=k
c
g
g
z
g
g
k
W
M
y
J
M
C
min
max
max
max
max
z
g
EJ
x
M
dx
w
d
)
(
2
2
Teoria bezwładności figur płaskich
A
dA
z
y
;
;
2
2
dA
z
I
dA
y
I
A
y
A
z
r
O
Moment bezwładności względem osi
;
;
2
A
zy
y
A
z
O
yzdA
I
I
I
dA
r
I
Moment bezwładności względem punktu O
Moment bezwładności względem układu osi
Moment dewiacyjny
=0, gdy jedna z osi jest osią symetrii
Twierdzenie Steinera (momenty bezwładności względem osi równoległych)
C
O
z
y
z
C
y
C
dA
z
C
y
C
a
b
0
;
2
)
(
2
2
2
2
A
c
A
c
A
C
A
c
A
z
dA
y
A
a
dA
y
a
dA
y
dA
a
y
dA
y
I
A
a
I
I
C
z
z
2
A
b
I
I
C
y
y
2
A
b
a
I
I
C
C
y
z
zy
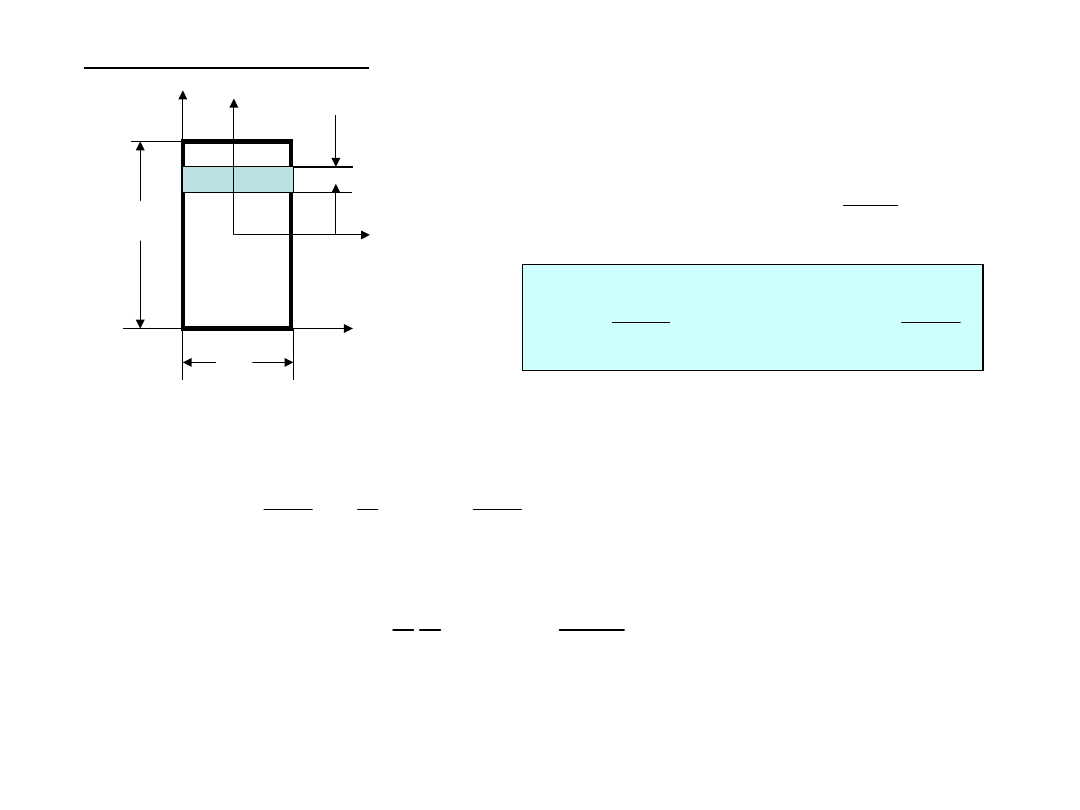
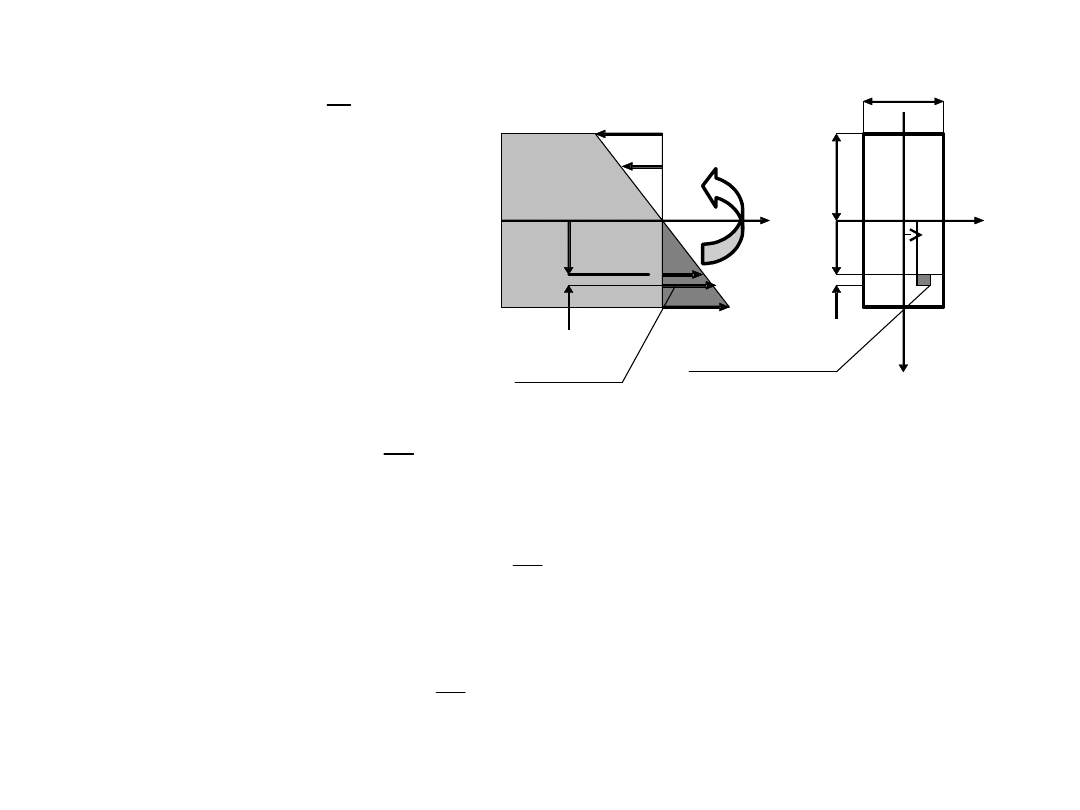
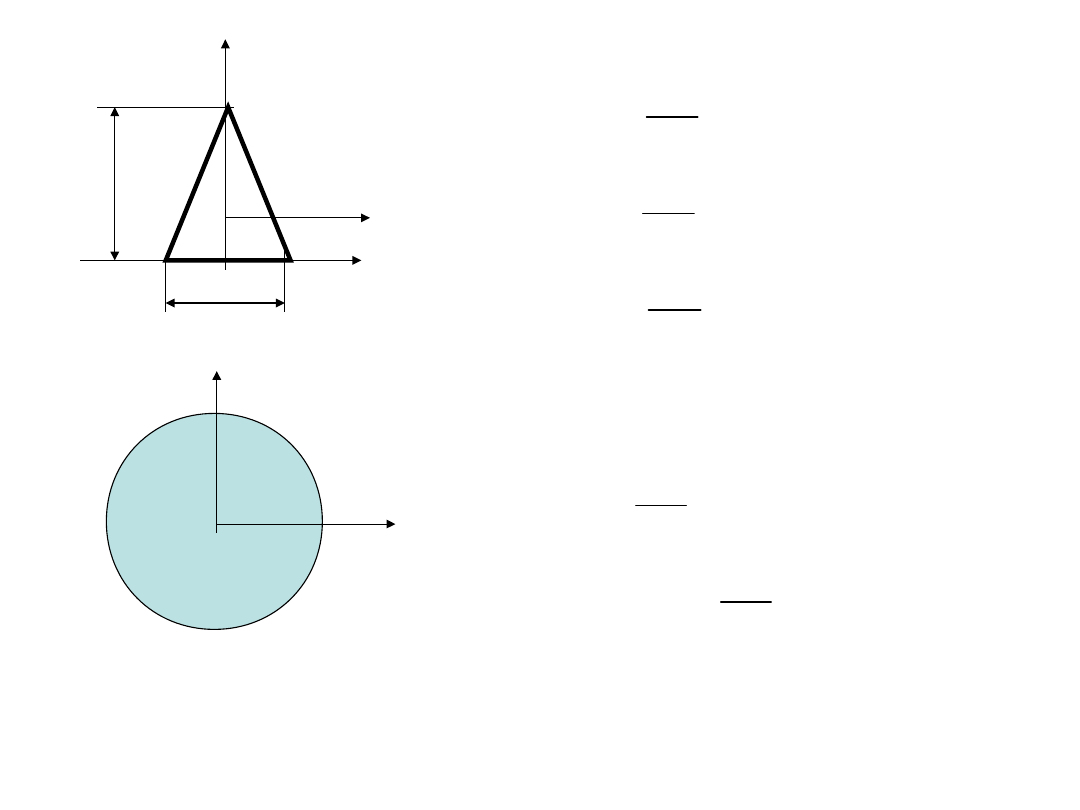
Podstawowe kształty
b
h
dy
y
C
z
C
y
C
12
;
3
2
/
2
/
2
bh
dy
b
y
I
bdy
dA
h
h
z
C
z
;
12
;
12
3
3
hb
I
bh
I
C
C
y
z
Zgodnie z twierdzeniem Steinera
;
3
2
12
3
2
3
bh
bh
h
bh
I
z
y
;
4
0
2
2
2
2
h
b
bh
h
b
I
I
C
C
y
z
zy
y=y
C
z
z
C
b
h
;
48
;
12
;
36
3
3
3
hb
I
bh
I
bh
I
C
C
y
z
z
O
z
C
y
C
;
4
;
2
4
4
r
I
I
r
I
C
C
y
z
O
z
z
C
y=y
C
r
;
11
,
0
2
3
4
8
)
(
;
8
)
4
(
2
1
;
3
4
4
2
2
4
2
4
4
r
r
r
r
A
y
I
I
r
r
I
I
r
y
C
z
z
y
z
c
C
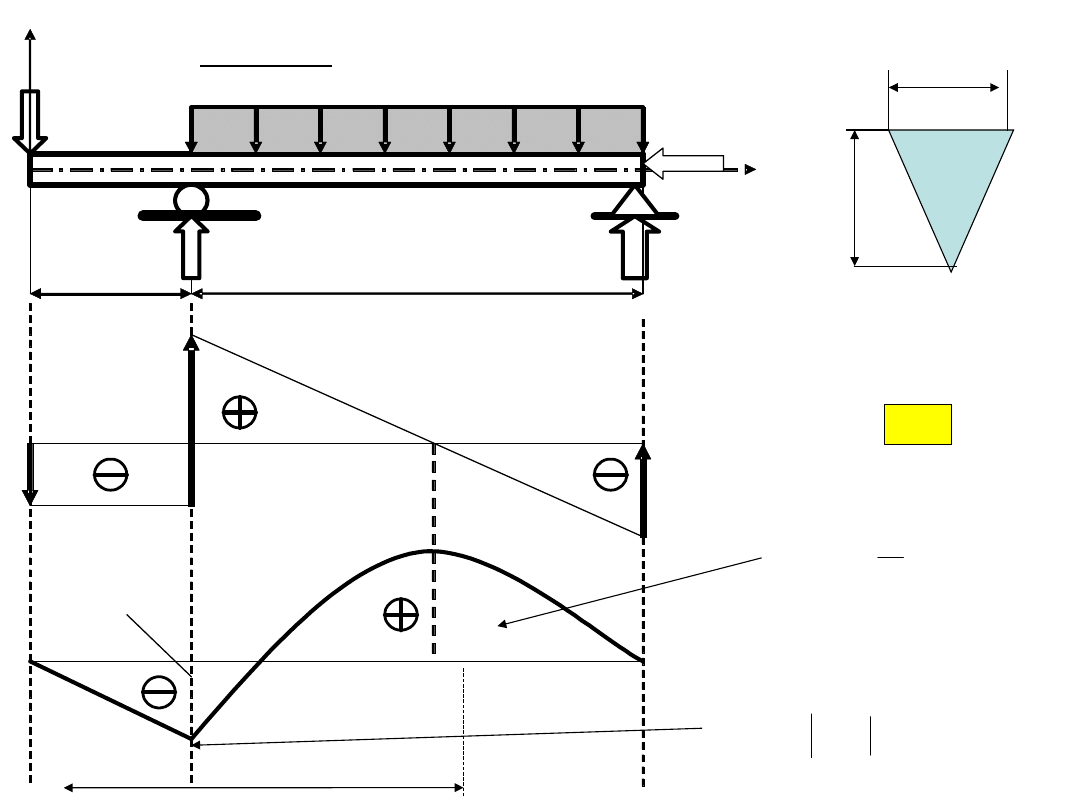
R
BY
R
A
P=ql
x
2 l
q kN/m ]
l/2
R
BX
y
P
R
A
R
BY
T
x
M
gx
-Pl
7l /
4
2
32
9
ql
M
gekstr
Przykład
20
30
l=0.5m
k
g
=160MP
a
?
q
2
max
ql
Pl
M
g
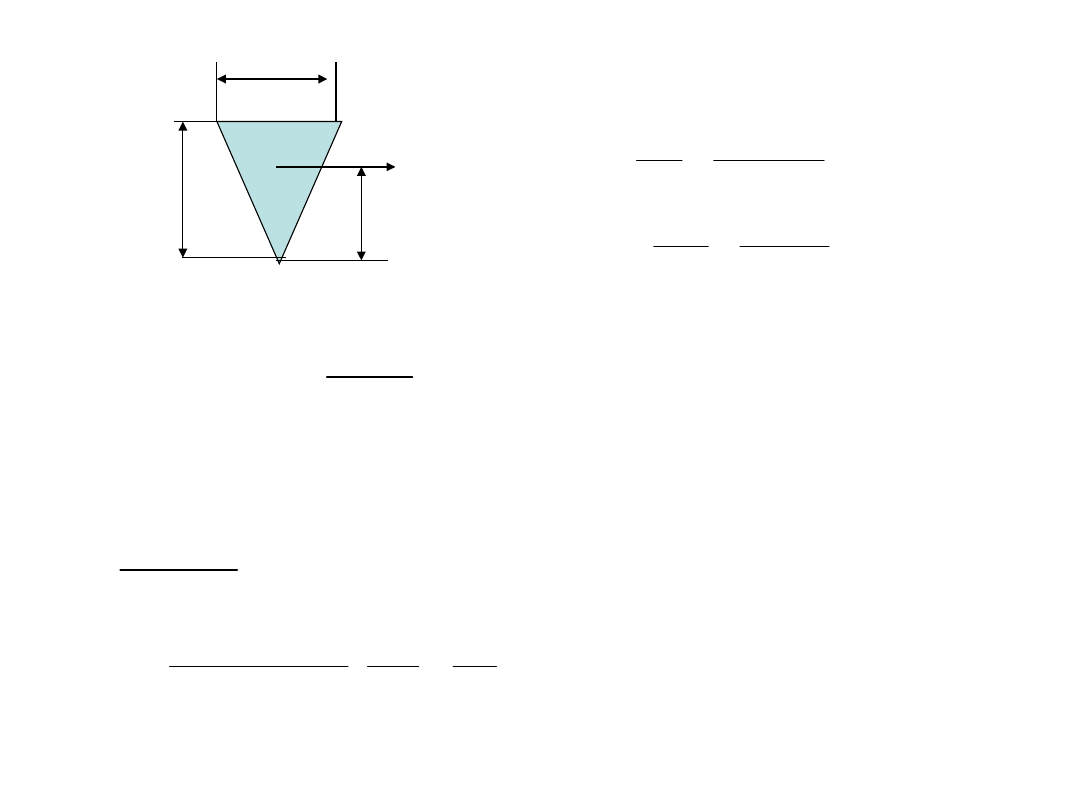
20
30
z
C
y
max
=20
;
10
75
,
0
20
10
5
,
1
;
10
5
,
1
36
)
30
(
20
36
3
3
4
max
min
4
4
3
3
mm
y
I
W
mm
bh
I
C
C
z
z
g
g
g
k
W
M
min
max
max
m
kN
mm
N
q
ql
ql
M
g
2
3
3
2
2
max
500
10
75
,
0
160
;
160
10
75
,
0
;
m
kN
q
/
48
,
0
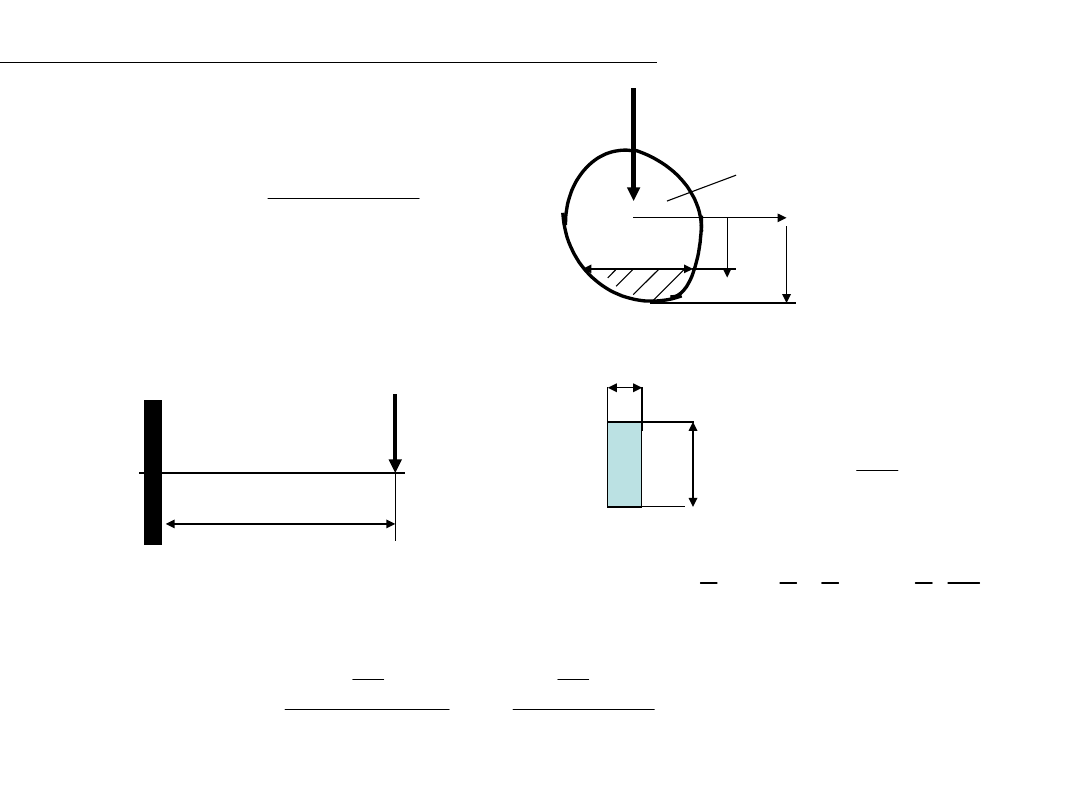
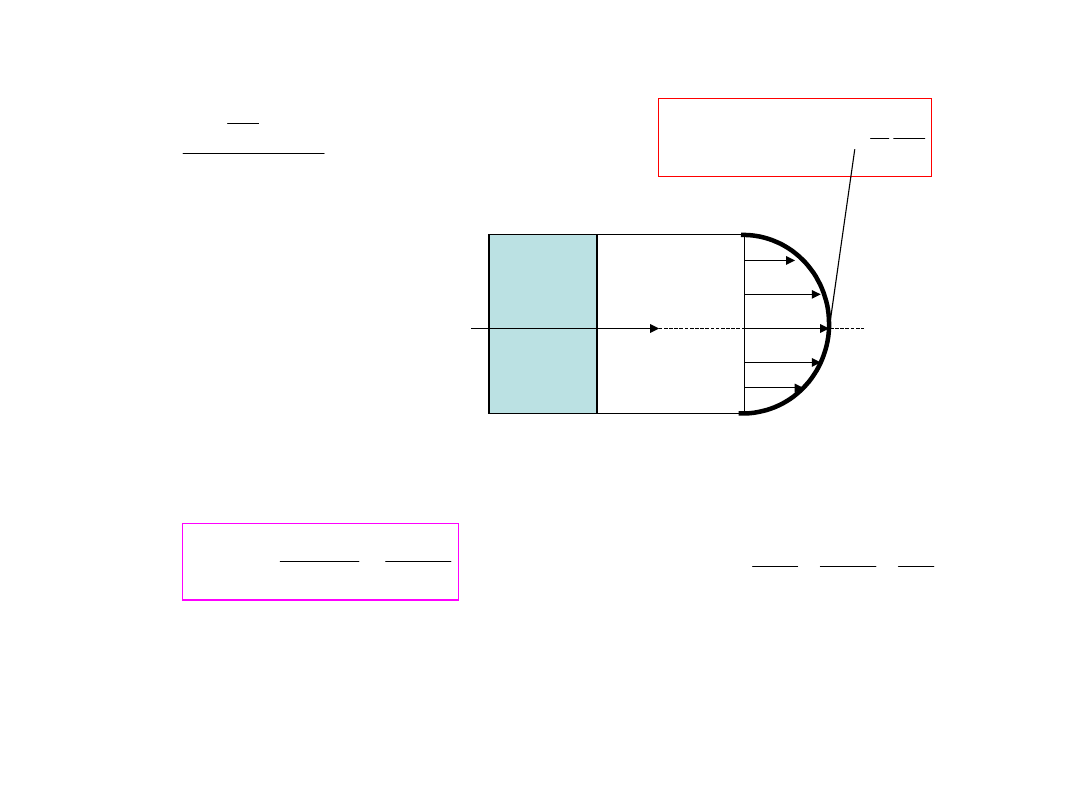
Naprężenia tnące przy zginaniu – wzór Żurawskiego
P
l
h
b
zc
y
y
x
I
)
y
(
b
S
T
)
y
,
x
(
max
T
x
z
C
b(y)
A
y
y
max
Przykład
T=const.=P
b(y)=const.=b
;
12
bh
I
3
zc
);
y
4
h
(
2
b
)
y
2
h
(
2
1
)
y
2
h
(
b
S
2
2
y
y
max
;
bh
)
y
4
h
(
P
6
12
h
b
b
2
)
y
4
h
(
b
P
)
y
(
3
2
2
3
2
2
;
bh
)
y
4
h
(
P
6
)
y
(
3
2
2
bh
P
2
3
)
0
y
(
max
;
0
)
2
/
h
y
(
Maksymalne naprężenia gnące w rozważanej belce
2
min
max
g
max
g
bh
l
P
6
W
M
;
6
bh
h
12
2
bh
y
I
W
2
3
max
zc
min
Gdy l=h
max
max
g
4
Gdy l=5h
max
max
g
20
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
Wyszukiwarka
Podobne podstrony:
Zginanie2 nap ug
Zginanie2 nap ug id 589945 Nieznany
Zginanie2 nap ug
D ug celny(2)
9 Zginanie uko Ťne zbrojenie min beton skr¦Öpowany
Lęk i samoocena na podstawie Kościelak R Integracja społeczna umysłowo UG, Gdańsk 1995 ppt
obliczanie zginanych el sprezonych
cw7 (zginanie)
zginanie proste
Zginanie prętów obciążenie ciągłe
REGULAMIN PRAKTYK ZAWODOWYCH, UG, PRAKTYKI
więcej podobnych podstron