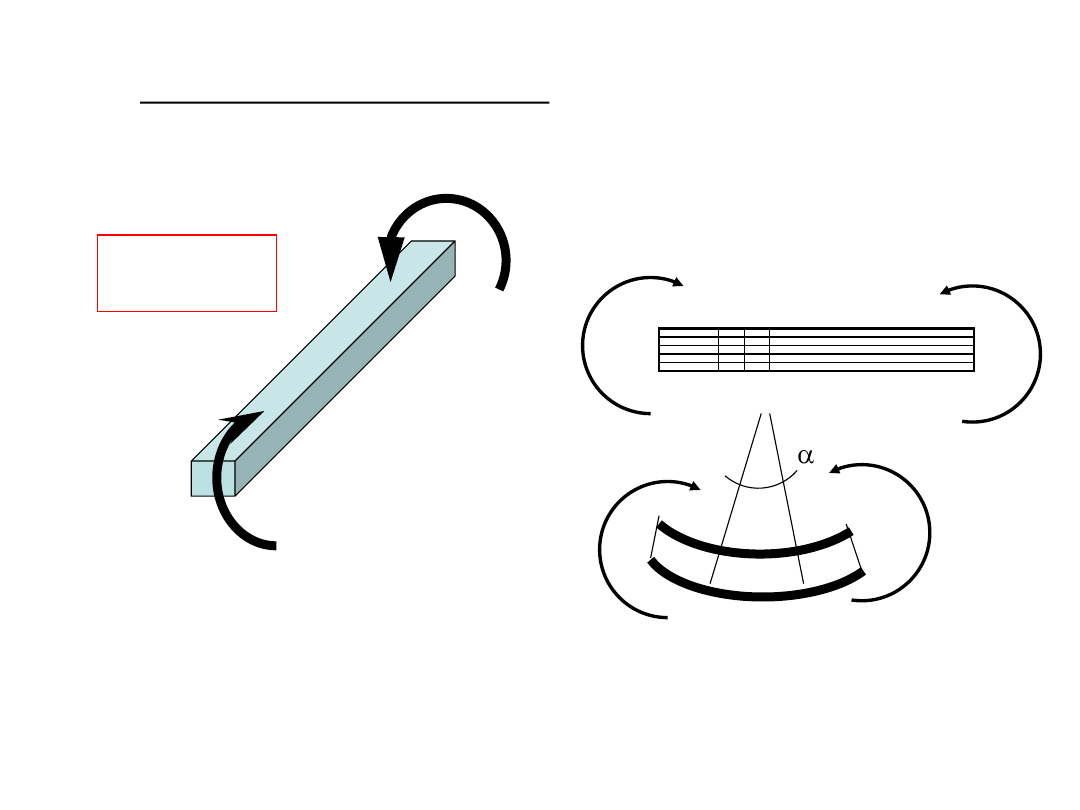
Naprężenia przy czystym zginaniu
M
g
M
g
T=0
M
g
=const.
Założenia:
-
Przekroje poprzeczne pozostają płaskie,
-
Warstwy nie oddziałują na siebie wzajemnie,
-
Warstwy poddane są jedynie rozciąganiu bądź ściskaniu (jednokierunkowy stan
naprężenia).
x
z
y
y
M
g
-
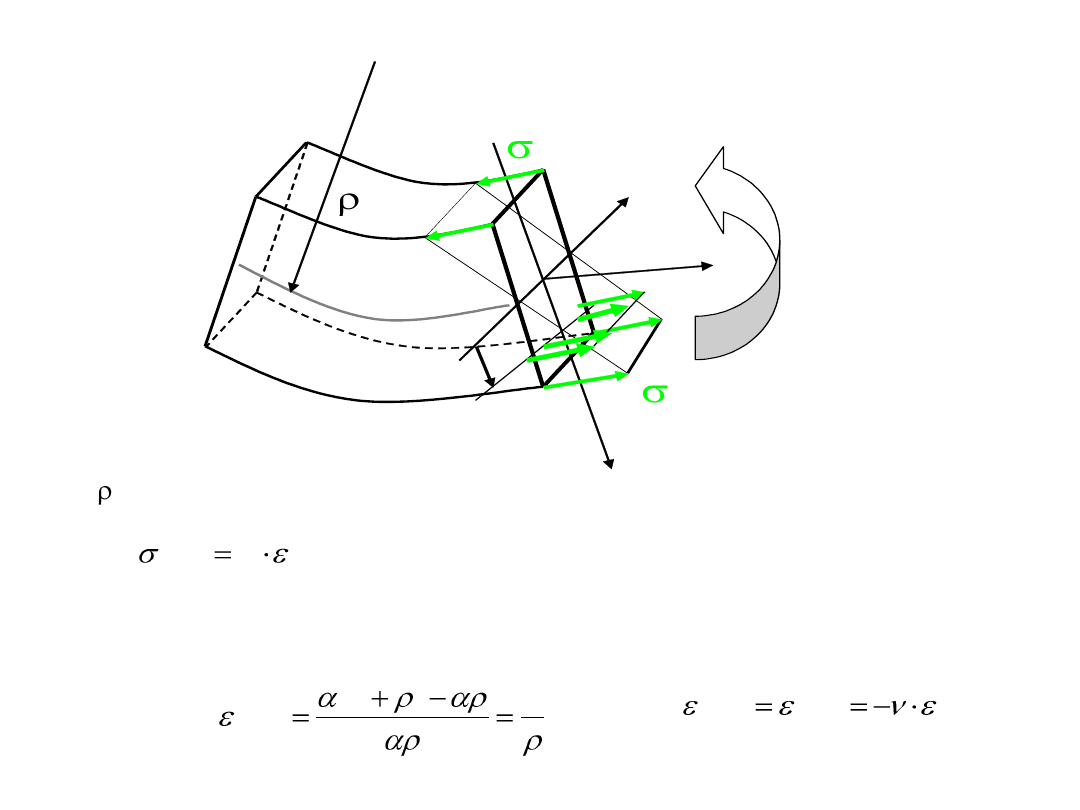
promień krzywizny warstwy obojętnej
)
(
)
(
y
E
y
x
x
;
)
(
)
(
y
y
y
x
Wydłużenie warstwy odległej o y od warstwy obojętnej
)
(
)
(
)
(
y
y
y
x
z
y
;
)
(
y
E
y
x
z
y
y
y
x
dy
dA
M
g
x
= E
b
h/2
A
A
x
ix
ydA
E
dA
F
0
0
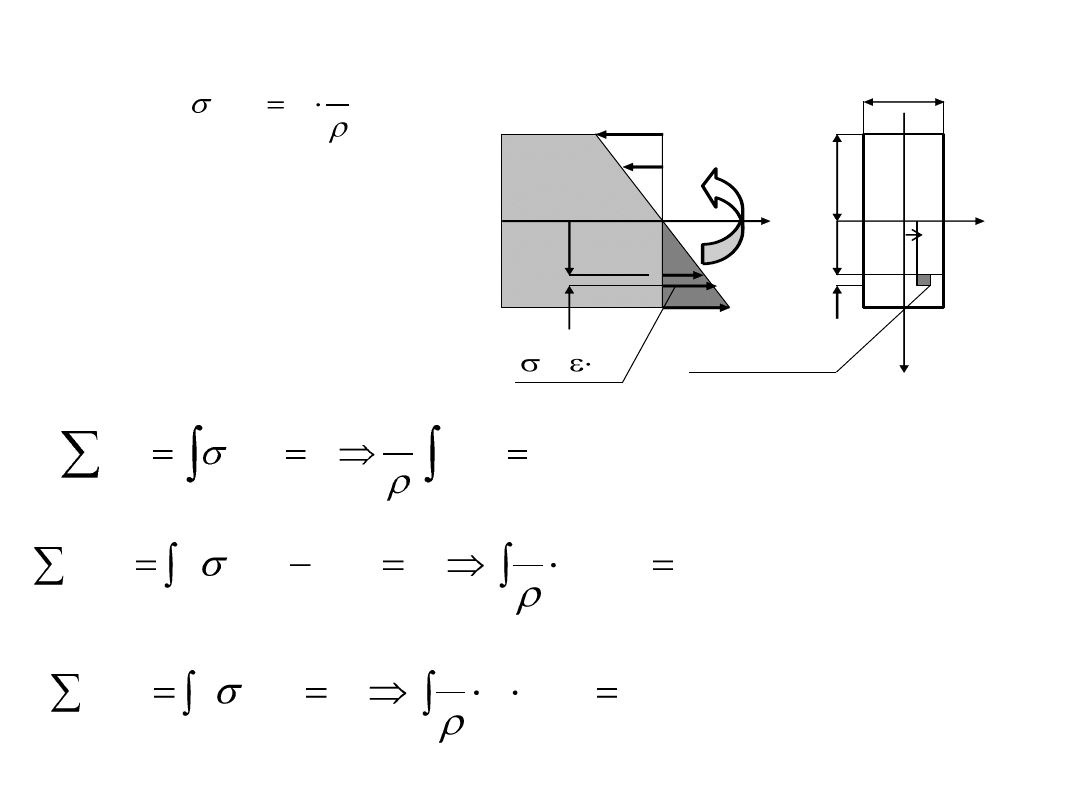
Warstwa obojętna zawiera środek
ciężkości
przekroju poprzecznego (Oz=Oz
c
)
Warunki równowagi
A
g
2
A
g
x
iz
M
dA
y
E
;
0
M
dA
y
M
A
A
x
iy
;
0
ydA
z
E
;
0
dA
z
M
E=const., =const.
;
I
ydA
z
;
I
dA
y
A
z
y
A
z
2
C
C
C
Moment bezwładności przekroju
poprzecznego względem osi z
c
Moment bezwładności przekroju
poprzecznegowzględem układu osi
y
c
z
c
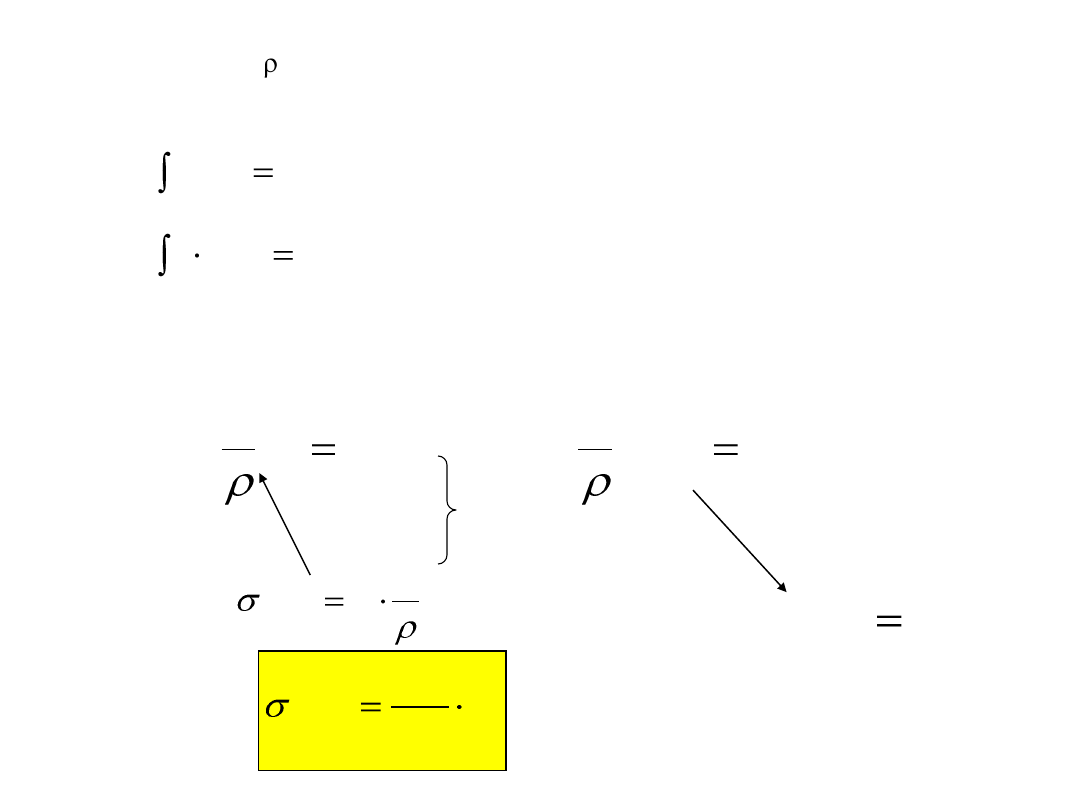
Wprowadzając oznaczenia
Mamy:
;
0
I
E
;
M
I
E
C
C
C
z
y
g
z
;
0
I
C
C
z
y
;
)
(
y
E
y
x
;
)
(
y
I
M
y
C
z
g
x
z
g
max
z
g
max
W
M
y
J
M
C
max
y
J
W
zc
z
Wskaźnik przekroju
2
2
2
/
3
2
2
2
dx
w
d
dx
dw
1
dx
w
d
1
z
g
J
M
E
z
g
2
2
EJ
M
dx
w
d
w
– przemieszczenie warstwy obojętnej
Równanie różniczkowe linii
ugięcia
w
x
w(x)
nieodkształcona warstwa
obojętna
Warstwa obojętna
po odkształceniu
Warunki brzegowe
z
g
2
2
EJ
M
dx
w
d
''
.
.
;
2
2
2
2
w
dx
w
d
const
EJ
const
M
EJ
M
dx
w
d
z
g
z
g
;
2
)
(
'
;
2
1
2
1
C
x
C
x
EJ
M
x
w
w
dx
dw
C
x
EJ
M
dx
dw
z
g
z
g
C
1
i C
2
– stałe całkowania
x
M
u
l
x=l w(l)=0
x=l w’(l)=0
M
g
M
g
M
g
x=0 w(0)=0
x=l w(l)=0
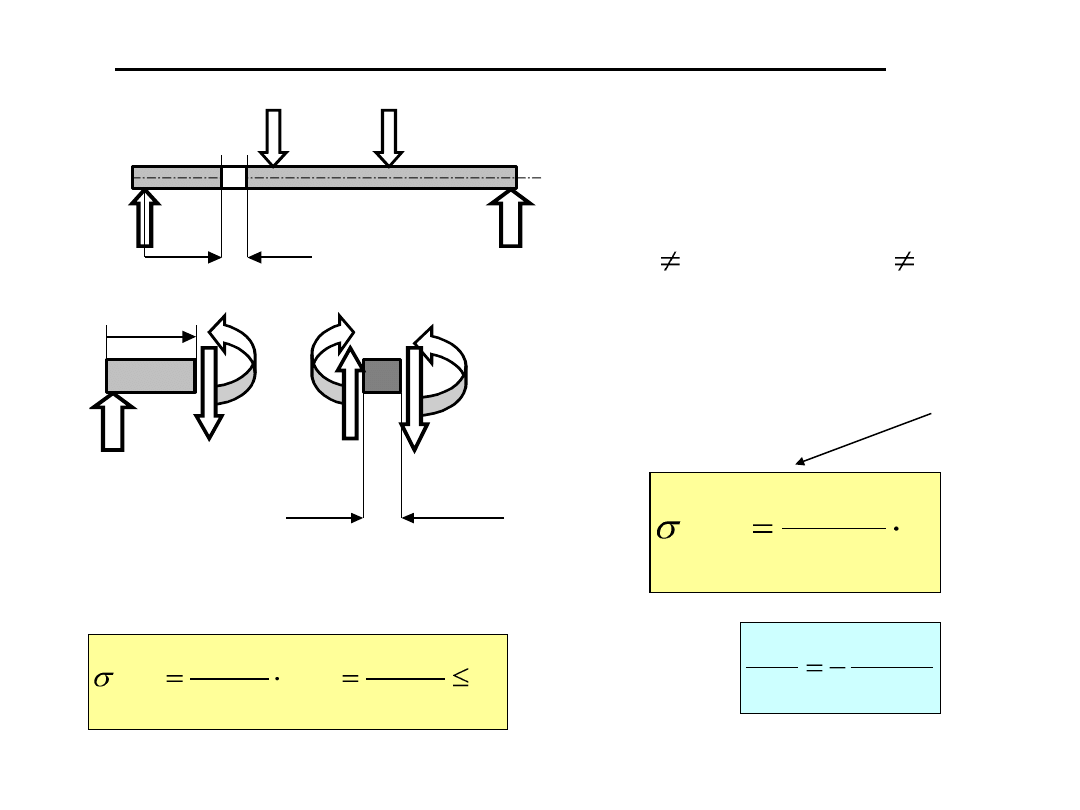
Naprężenia od zginania w belkach obciążonych poprzecznie
dx
x
dx
T
x
+dT
x
T
x
M
gx
R
1
M
g
+dM
gx
R
2
P
1
T
x
P
2
x
R
1
a)
.
;
0
const
M
T
g
x
;
)
(
)
(
y
I
x
M
y
C
z
g
x
Uogólnienie wzorów wyprowadzonych
dla czystego zginania
gdy k
r
=k
c
g
g
z
g
g
k
W
M
y
J
M
C
min
max
max
max
max
z
g
EJ
x
M
dx
w
d
)
(
2
2
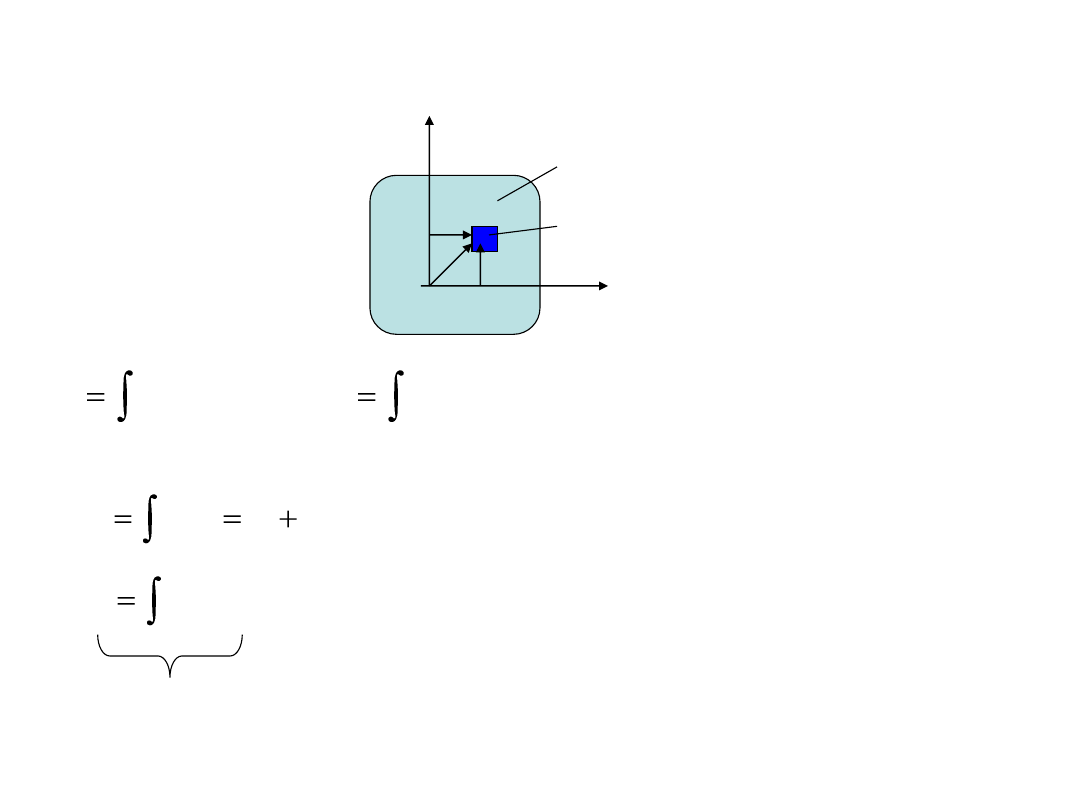
Teoria bezwładności figur płaskich
A
dA
z
y
;
;
2
2
dA
z
I
dA
y
I
A
y
A
z
r
O
Moment bezwładności względem osi
;
;
2
A
zy
y
A
z
O
yzdA
I
I
I
dA
r
I
Moment bezwładności względem punktu O
Moment bezwładności względem układu osi
Moment dewiacyjny
=0, gdy jedna z osi jest osią symetrii
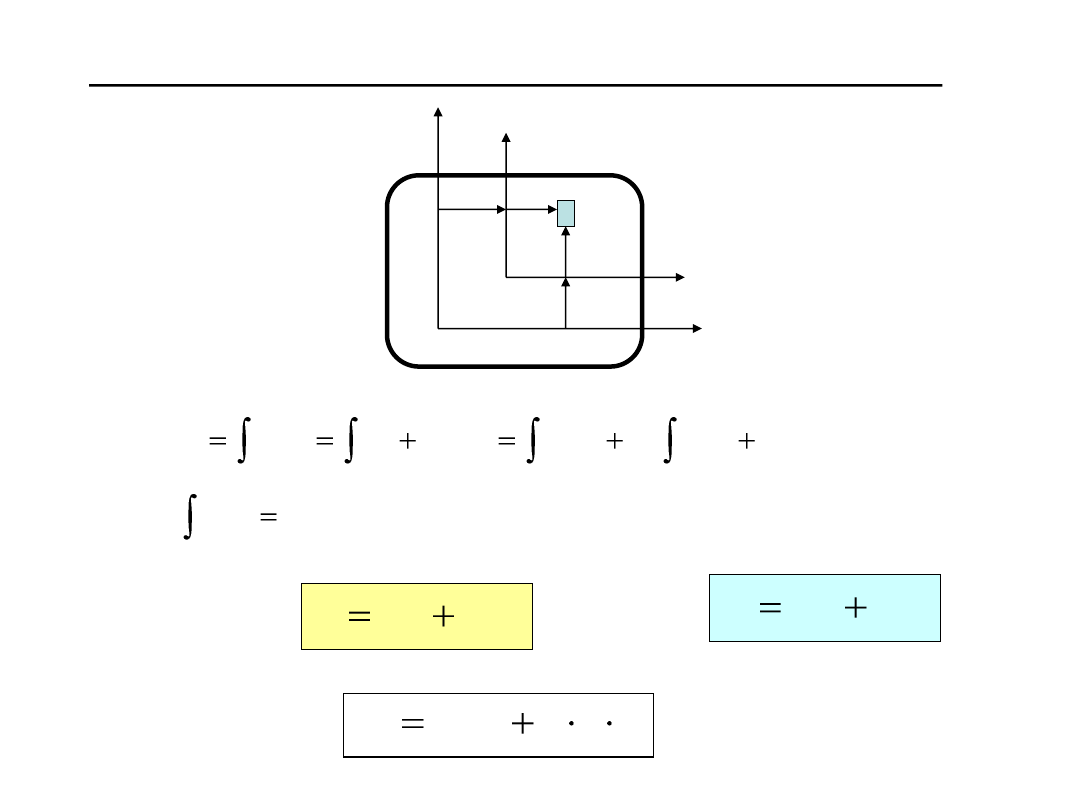
Twierdzenie Steinera (momenty bezwładności względem osi równoległych)
C
O
z
y
z
C
y
C
dA
z
C
y
C
a
b
0
;
2
)
(
2
2
2
2
A
c
A
c
A
C
A
c
A
z
dA
y
A
a
dA
y
a
dA
y
dA
a
y
dA
y
I
A
a
I
I
C
z
z
2
A
b
I
I
C
y
y
2
A
b
a
I
I
C
C
y
z
zy
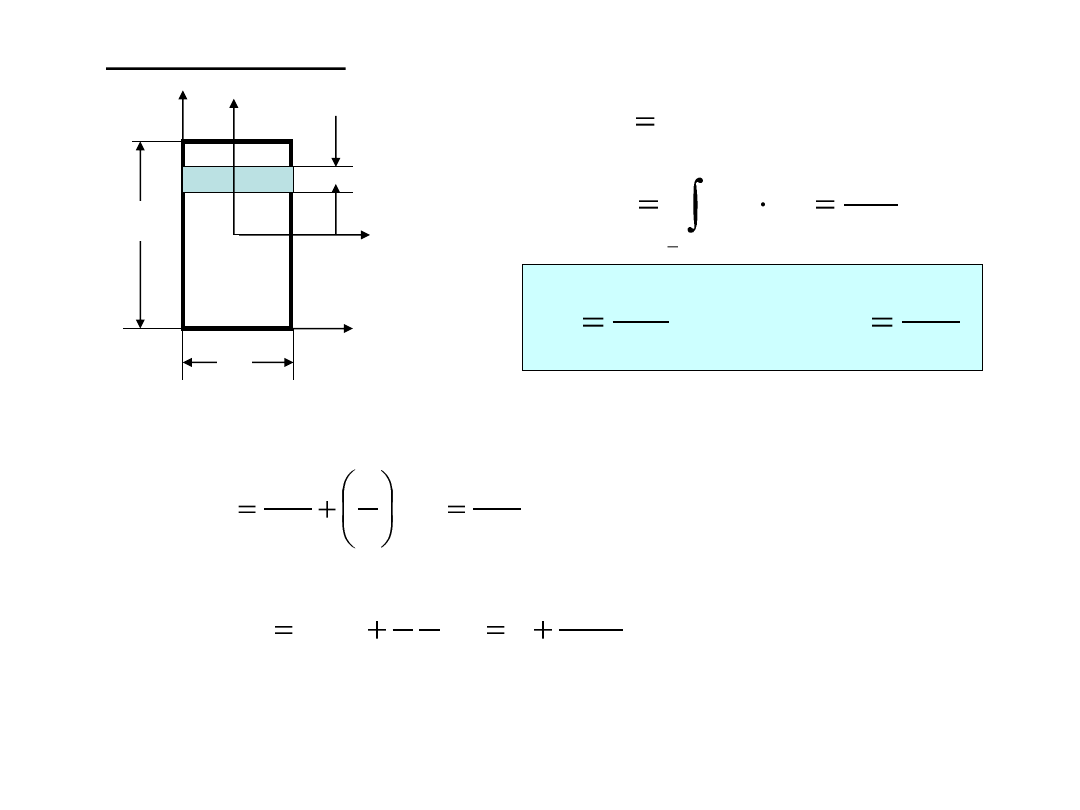
Podstawowe kształty
b
h
dy
y
C
z
C
y
C
12
;
3
2
/
2
/
2
bh
dy
b
y
I
bdy
dA
h
h
z
C
z
;
12
;
12
3
3
hb
I
bh
I
C
C
y
z
Zgodnie z twierdzeniem Steinera
;
3
2
12
3
2
3
bh
bh
h
bh
I
z
y
;
4
0
2
2
2
2
h
b
bh
h
b
I
I
C
C
y
z
zy
y=y
C
z
z
C
b
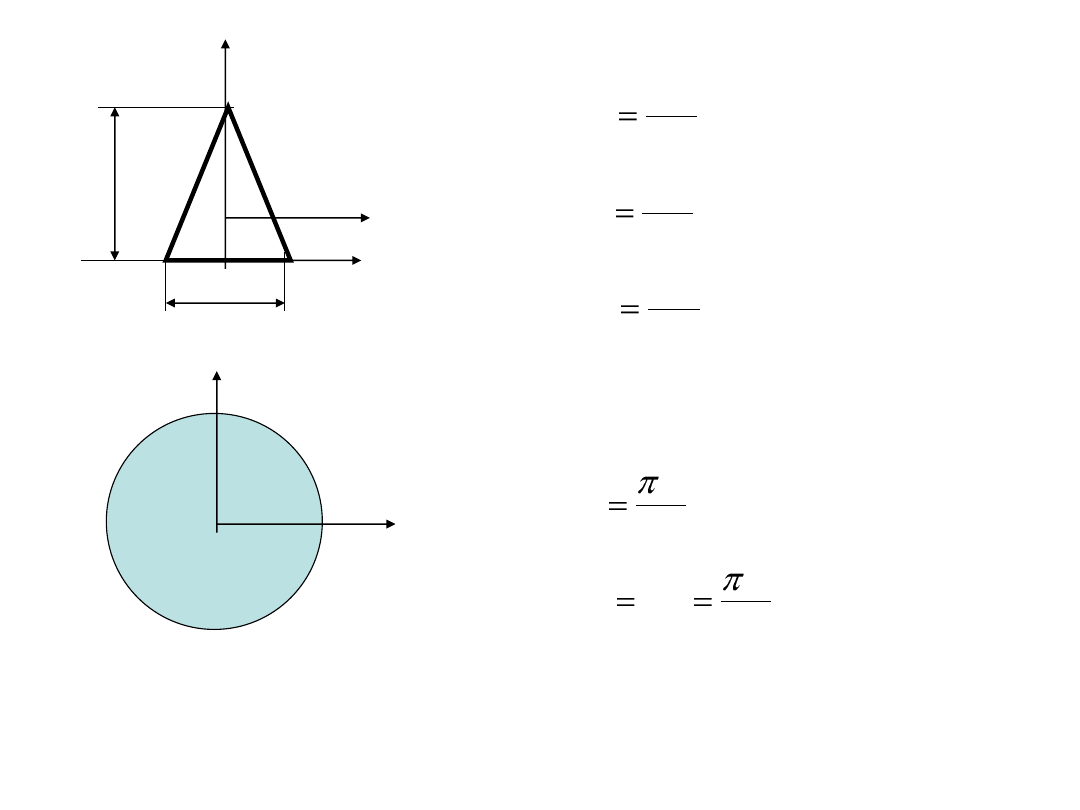
h
;
48
;
12
;
36
3
3
3
hb
I
bh
I
bh
I
C
C
y
z
z
O
z
C
y
C
;
4
;
2
4
4
r
I
I
r
I
C
C
y
z
O
z
z
C
y=y
C
r
;
11
,
0
2
3
4
8
)
(
;
8
)
4
(
2
1
;
3
4
4
2
2
4
2
4
4
r
r
r
r
A
y
I
I
r
r
I
I
r
y
C
z
z
y
z
c
C
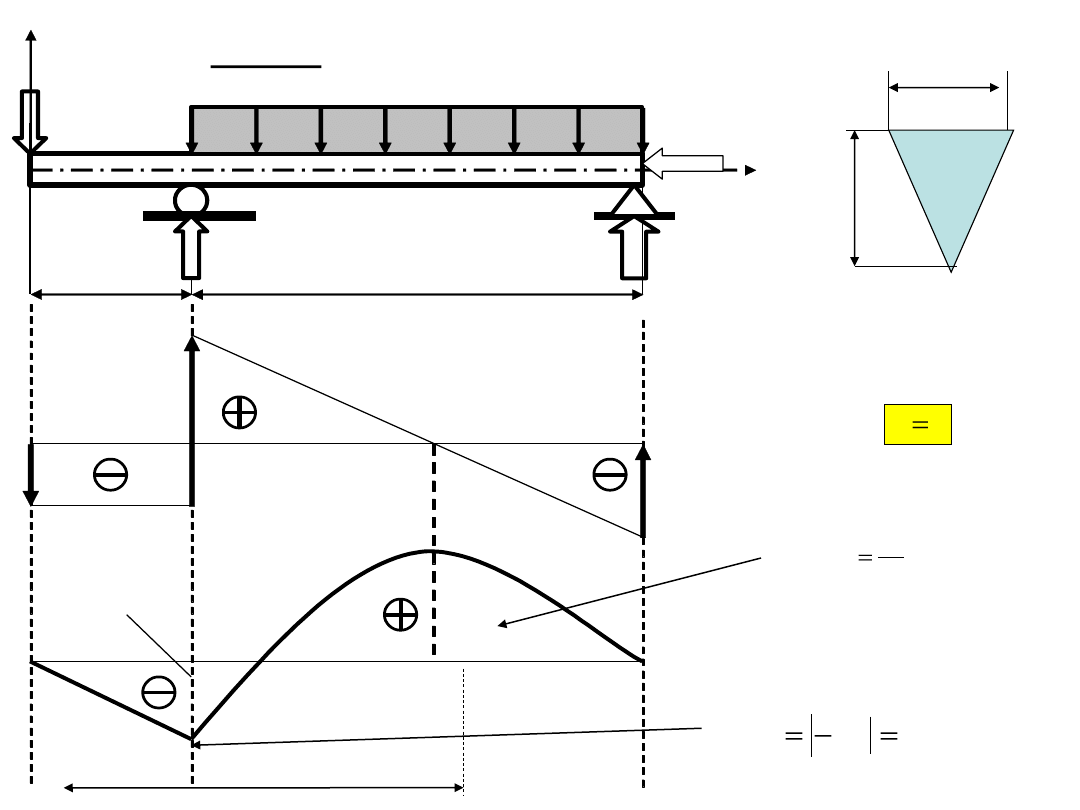
R
BY
R
A
P=ql
x
2 l
q kN/m ]
l/2
R
BX
y
P
R
A
R
BY
T
x
M
gx
-Pl
7l /4
2
32
9
ql
M
gekstr
Przykład
20
30
l=0.5m
k
g
=160MPa
?
q
2
max
ql
Pl
M
g
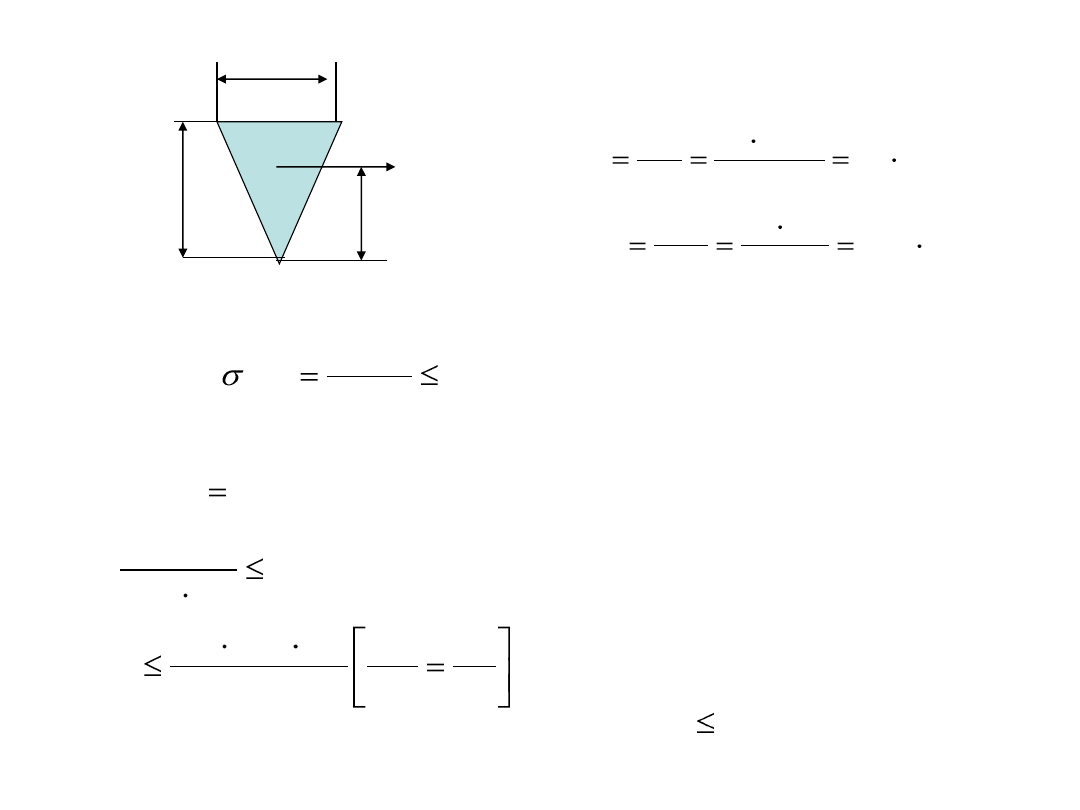
20
30
z
C
y
max
=20
;
10
75
,
0
20
10
5
,
1
;
10
5
,
1
36
)
30
(
20
36
3
3
4
max
min
4
4
3
3
mm
y
I
W
mm
bh
I
C
C
z
z
g
g
g
k
W
M
min
max
max
m
k N
mm
N
q
ql
ql
M
g
2
3
3
2
2
max
500
10
75
,
0
160
;
160
10
75
,
0
;
m
kN
q
/
48
,
0
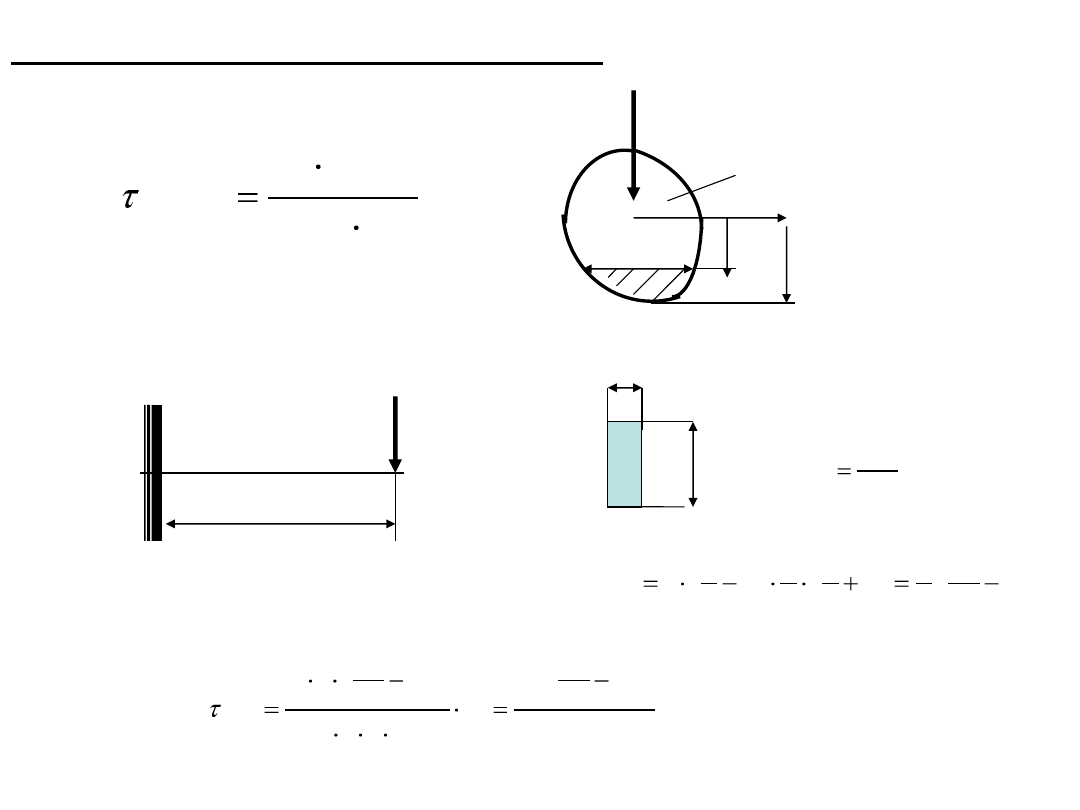
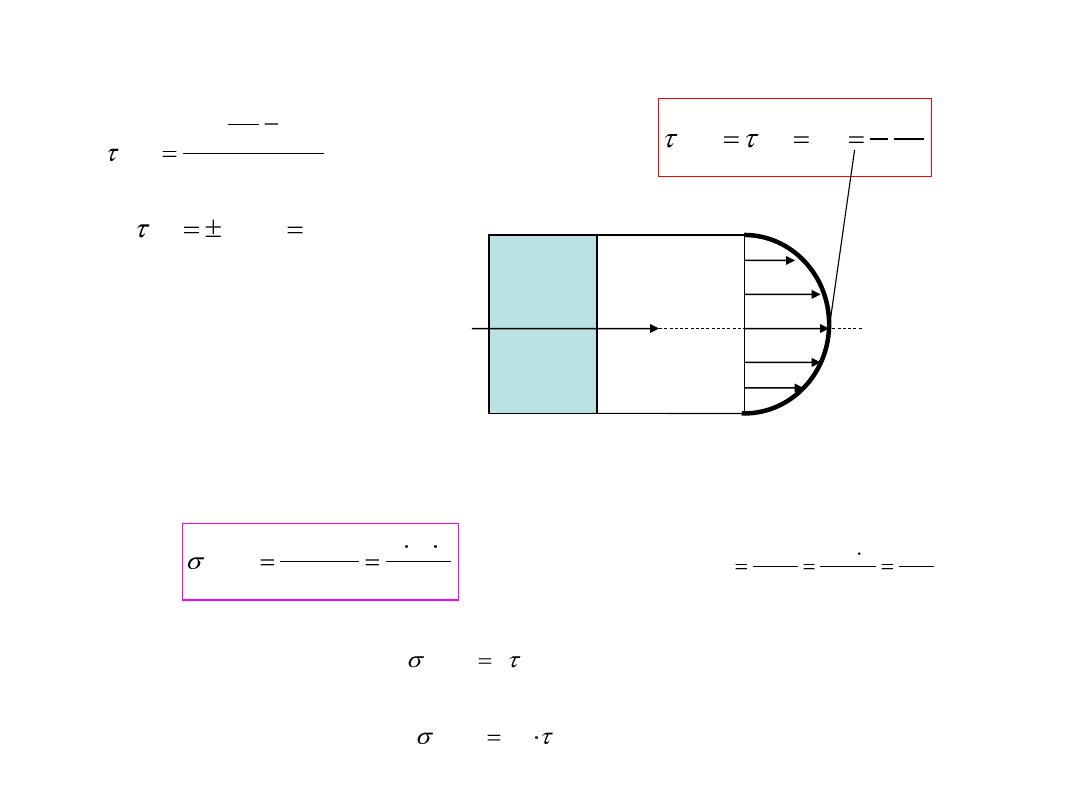
Naprężenia tnące przy zginaniu – wzór Żurawskiego
P
l
h
b
zc
y
y
x
I
)
y
(
b
S
T
)
y
,
x
(
max
T
x
z
C
b(y)
A
y
y
max
Przykład
T=const.=P
b(y)=const.=b
;
12
bh
I
3
zc
);
y
4
h
(
2
b
)
y
2
h
(
2
1
)
y
2
h
(
b
S
2
2
y
y
max
;
bh
)
y
4
h
(
P
6
12
h
b
b
2
)
y
4
h
(
b
P
)
y
(
3
2
2
3
2
2
;
bh
)
y
4
h
(
P
6
)
y
(
3
2
2
bh
P
2
3
)
0
y
(
max
;
0
)
2
/
h
y
(
Maksymalne naprężenia gnące w rozważanej belce
2
min
max
g
max
g
bh
l
P
6
W
M
;
6
bh
h
12
2
bh
y
I
W
2
3
max
zc
min
Gdy l=h
max
max
g
4
Gdy l=5h
max
max
g
20
Wyszukiwarka
Podobne podstrony:
Zginanie2 nap ug
4 Zginanie 2 nap ug
Zginanie cienkiej plyty id 5899 Nieznany
MBSE Sprng ug id 770850 Nieznany
Zginanie ze scinaniem id 589942 Nieznany
11 cw10 nap pow id 692902 Nieznany (2)
Zginanie2 nap ug
Belki zginane id 82597 Nieznany (2)
6 zginanie id 44001 Nieznany (2)
9 zginanie ukosne id 48434 Nieznany (2)
zginanie ukosne!!!!!!! id 58993 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
więcej podobnych podstron