ZGINANIE UKOŚNE (ZŁOŻONE)
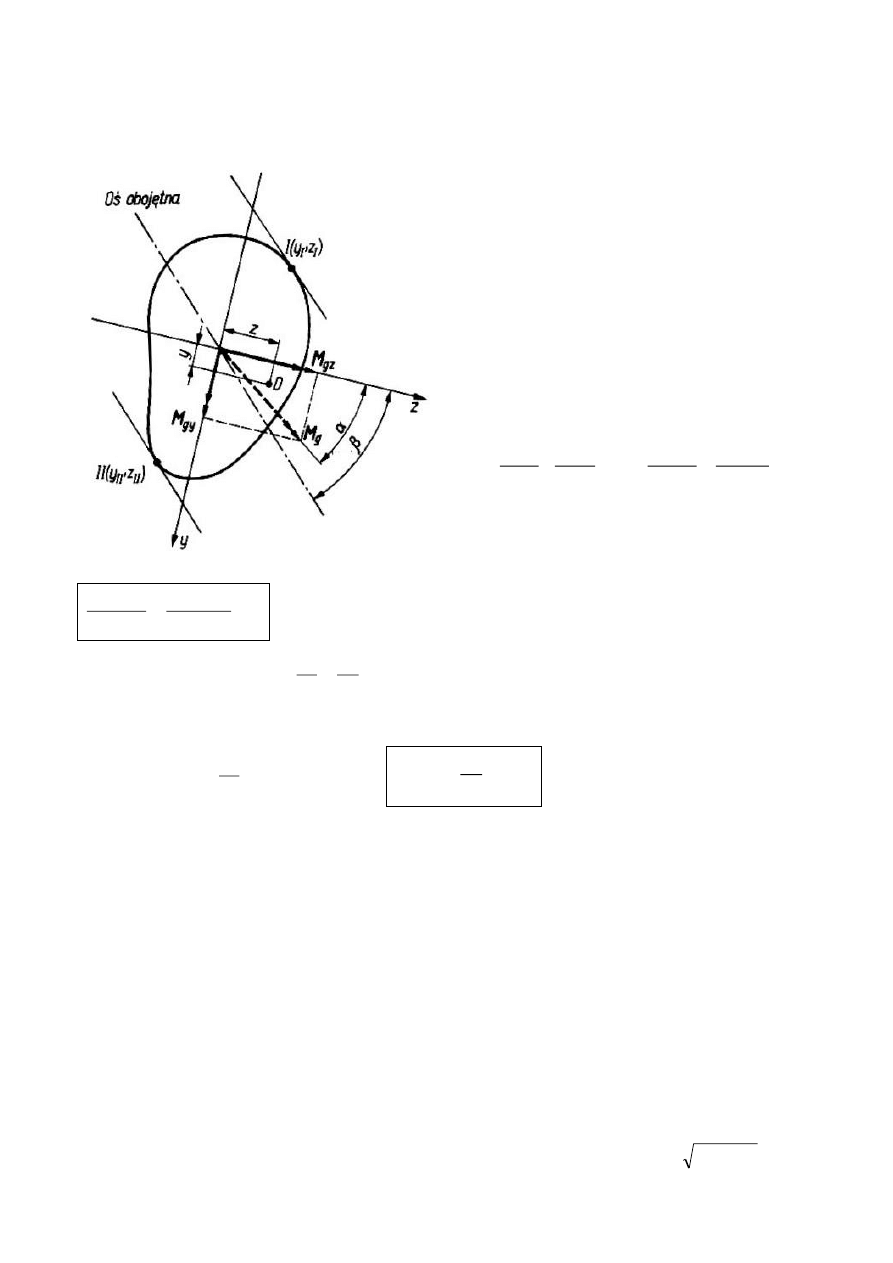
Zginanie ukośne – gdy kierunek wektora momentu gnącego nie pokrywa się z kierunkiem
jednej z głównych osi bezwładności przekroju.
z, y
– główne centralne osie bezwładności
M
g
– moment gnący i jego składowe:
M
gy
= M
g
sin
,
M
gz
= M
g
cos
Naprężenia w dowolnym punkcie D(y,z)
wyznaczymy jako superpozycję naprężeń
wywołanych dwoma zginaniami prostymi.
W przyjętym układzie osi i zwrocie moment
=
+
z
y
g
z
gz
y
gy
J
y
J
z
M
J
y
M
J
z
M
cos
sin
Przyrównując naprężenie do zera (
=0),
otrzymamy
równanie osi obojętnej przekroju.
0
cos
sin
0
0
z
y
J
y
J
z
gdzie y
o
, z
o
-
współrzędne dowolnego punktu na osi obojętnej.
Po przekształceniu
tg
J
J
z
y
y
z
0
0
Niech
określa położenie osi obojętnej względem osi z
wówczas
tg
z
y
0
0
i
tg
J
J
tg
y
z
położenie osi obojętnej nie zależy od wartości M
g
, a tylko od kierunku jego wektora i
stosunku dwóch głównych momentów bezwładności,
kierunek osi obojętnej w zginaniu ukośnym nie pokrywa się z kierunkiem wektora
momentu głównego,
naprężenia maksymalne wystąpią w punktach najbardziej odległych od osi obojętnej,
zginanie ukośne nie występuje w przypadku takich przekrojów jak np. kołowy czy
kwadratowy co wynika z równości J
z
= J
y
.
Przemieszczenia belki ukośnie określimy za pomocą superpozycji:
jeżeli w płaszczyźnie xy ugięcie określimy z EJ
z
y
= - M
gz
a w płaszczyźnie xz
z EJ
y
z
= - M
gy
to ugięcie wypadkowe będzie sumą geometryczną:
2
2
z
y
f
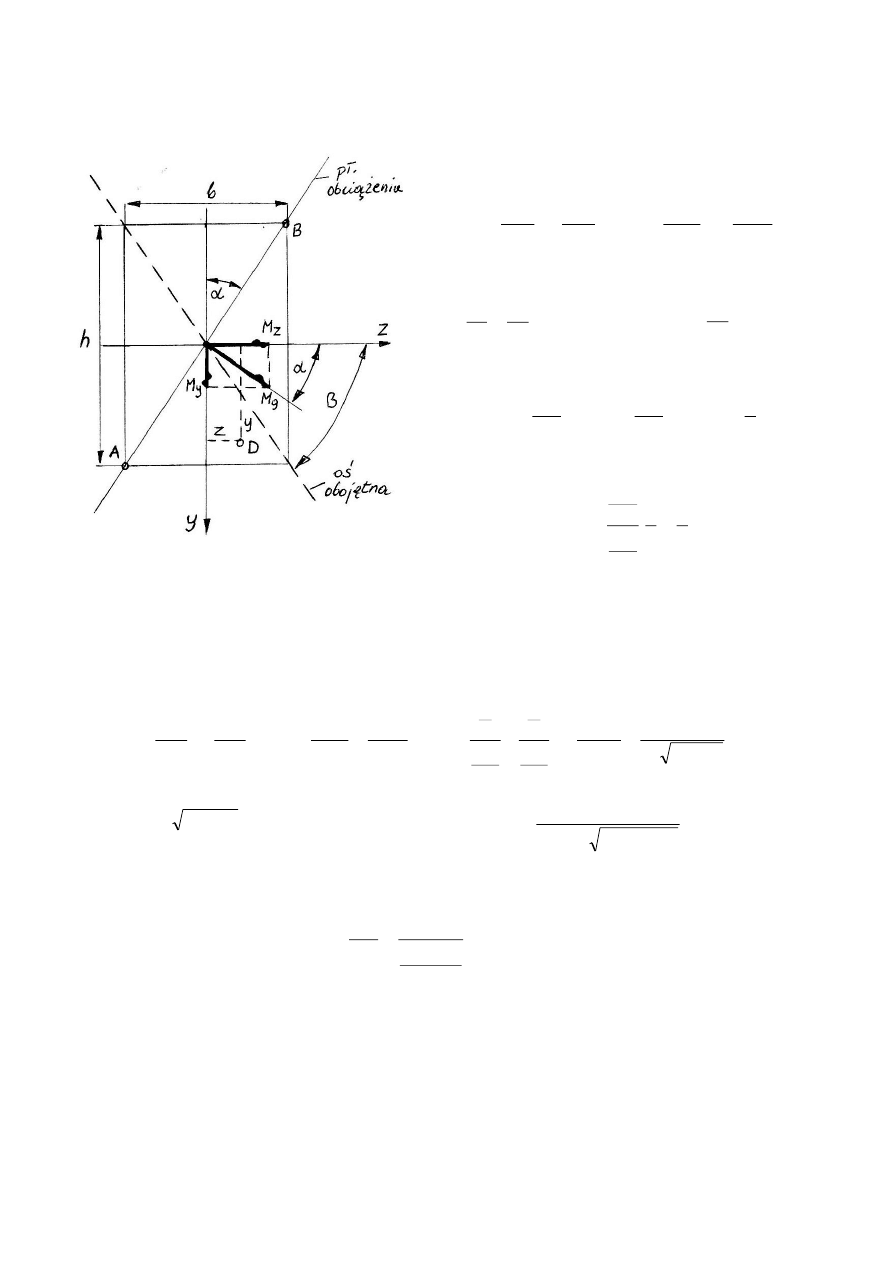
Przykład.
Na belkę o przekroju prostokątnym b=10 cm, h=20 cm działa M
g
=30 kNm.
Płaszczyzna działania momentu przechodzi przez przekątną AB. Znaleźć położenie
osi obojętnej zginania i obliczyć największe naprężenia
.
Całkowite naprężenie w dowolnym punkcie D:
y
J
z
J
M
y
J
M
z
J
M
z
y
g
z
gz
y
gy
D
cos
sin
równanie osi obojętnej:
tg
J
J
z
y
y
z
0
0
tg
J
J
tg
y
z
Wyznaczmy potrzebne wielkości:
h
b
tg
bh
J
hb
J
z
y
12
12
3
3
stąd
b
h
h
b
bh
hb
tg
12
12
3
3
-
osią obojętną jest druga przekątna prostokąta
Maksymalne naprężenia występują w punktach najbardziej oddalonych od osi obojętnej
czyli w punktach A i B.
2
2
2
2
max
12
12
6
6
cos
sin
h
b
bh
M
bhd
M
bh
d
b
hb
d
h
M
W
W
M
y
J
M
z
J
M
g
g
g
z
y
g
z
gz
y
gy
gdzie
2
2
h
b
d
– długość przekątnej,
Pa
6
2
2
3
10
5
,
80
2
,
0
1
,
0
2
,
0
1
,
0
12
10
30
W przypadku zginania prostego (płaszczyzna obciążenia przechodzi przez xy:
Pa
W
M
z
g
6
2
3
max
10
45
6
2
,
0
1
,
0
10
30
Wyszukiwarka
Podobne podstrony:
zginanie ukosne!!!!!!! id 58993 Nieznany
06 zginanie ukosne zadanie 02 b Nieznany (2)
Belki zginane id 82597 Nieznany (2)
6 zginanie id 44001 Nieznany (2)
Zginanie cienkiej plyty id 5899 Nieznany
Zginanie ze scinaniem id 589942 Nieznany
Zginanie2 nap ug id 589945 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
więcej podobnych podstron