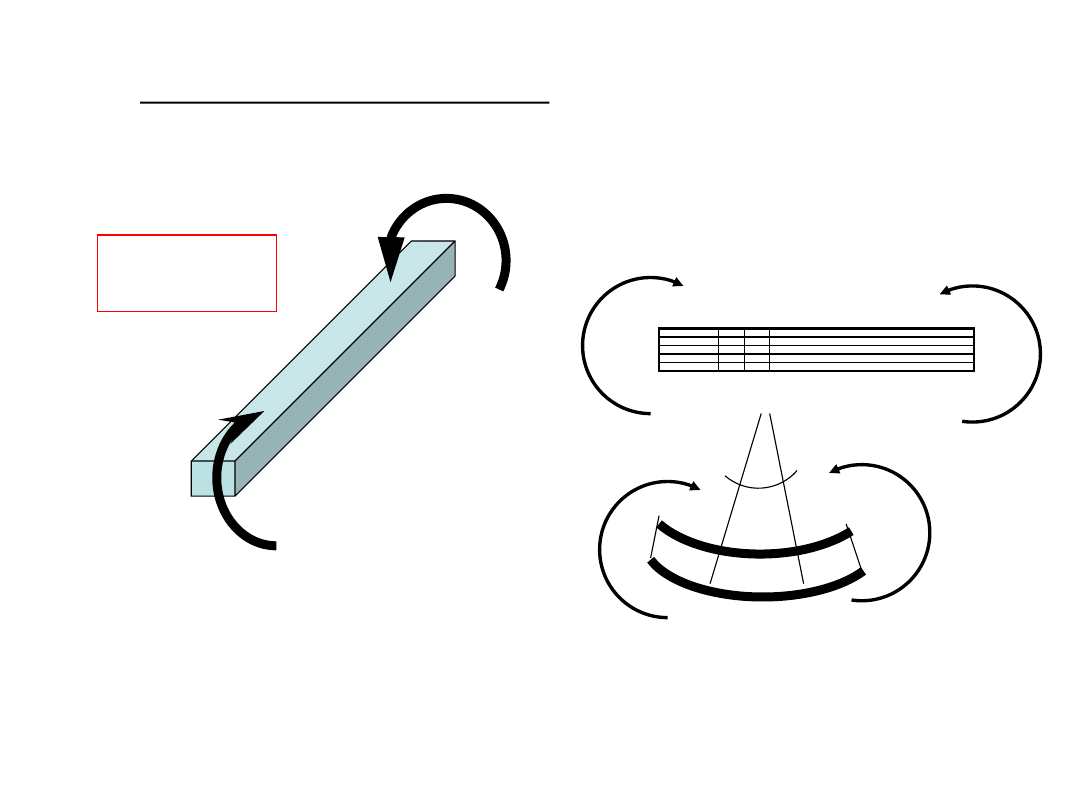
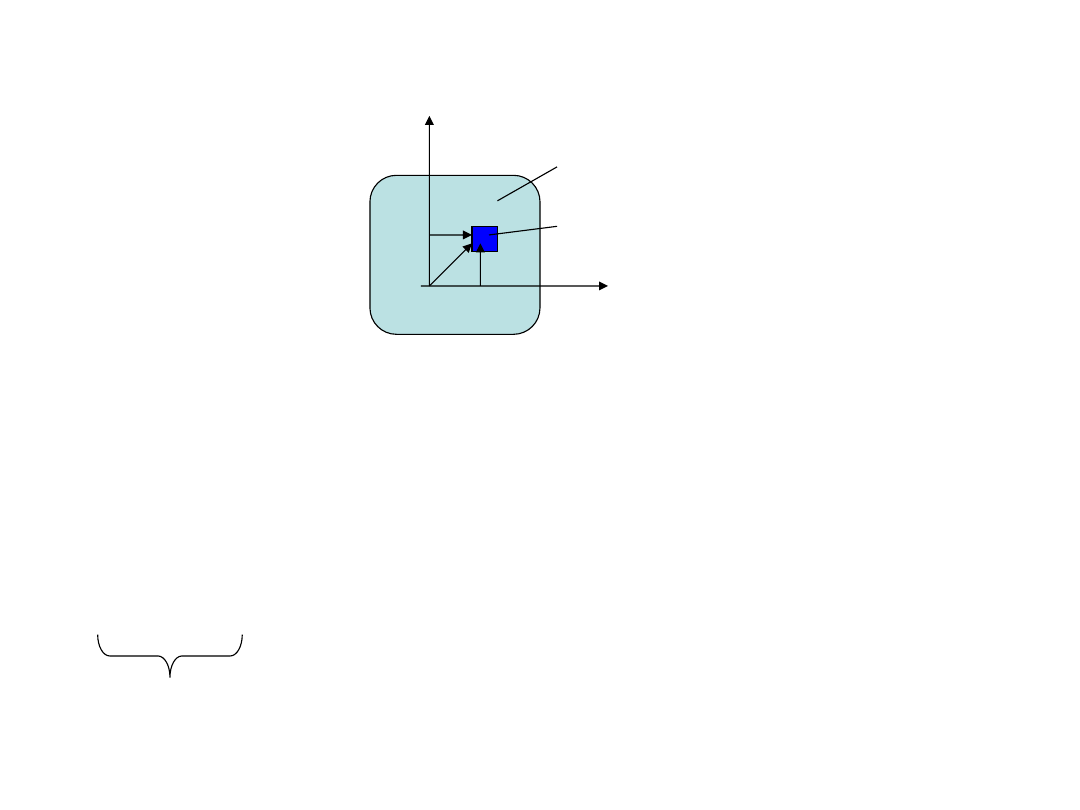
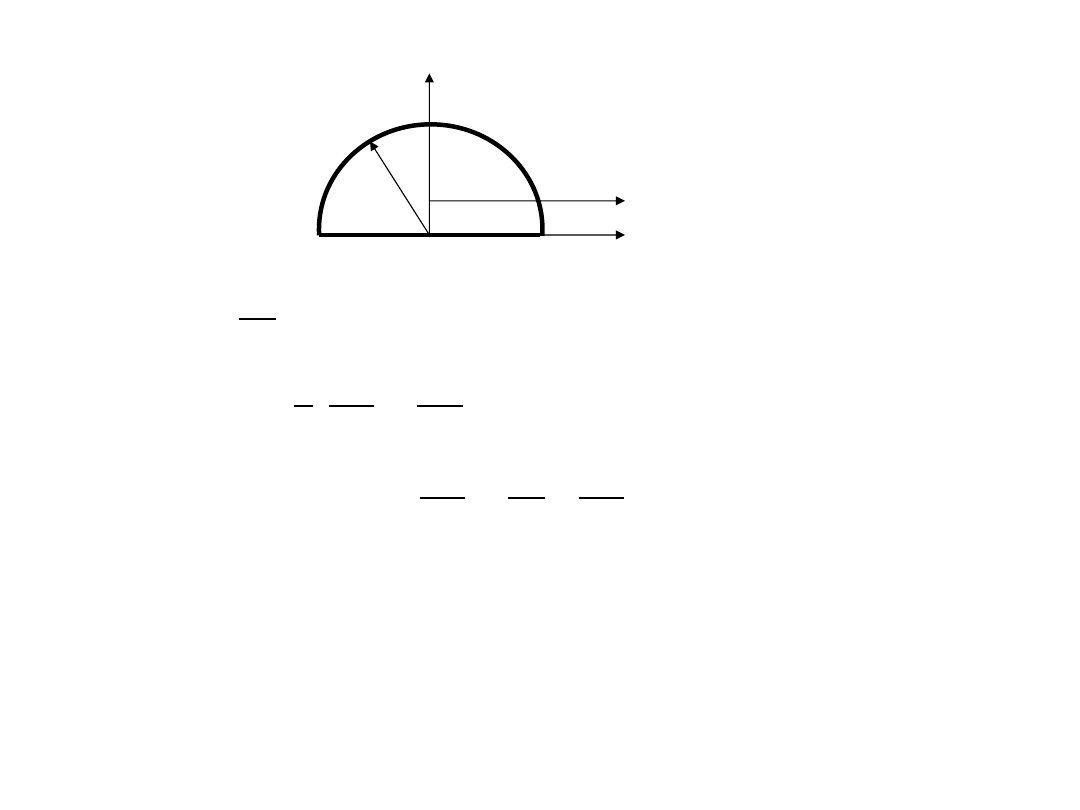
Naprężenia przy czystym zginaniu
M
g
M
g
T=0
M
g
=const.
Założenia:
-
Przekroje poprzeczne pozostają płaskie,
-
Warstwy nie oddziałują na siebie wzajemnie,
-
Warstwy poddane są jedynie rozciąganiu bądź ściskaniu (jednokierunkowy stan
naprężenia).
x
z
y
y
M
g
-
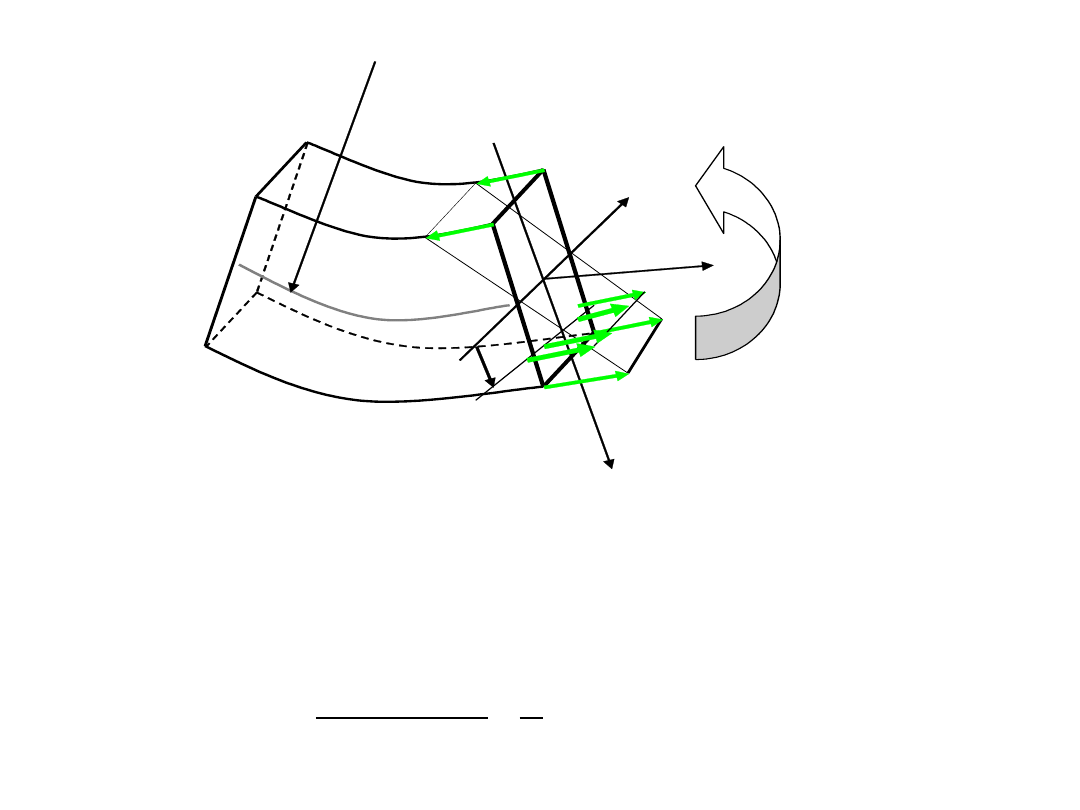
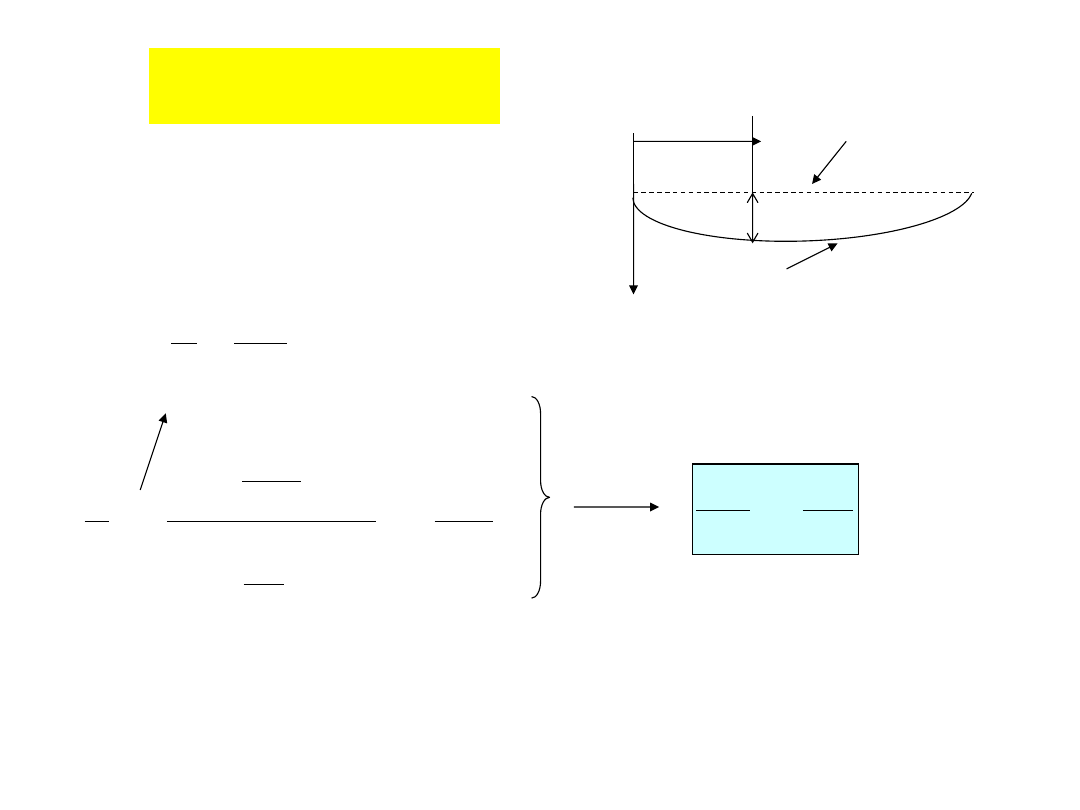
promień krzywizny warstwy obojętnej
)
(
)
(
y
E
y
x
x
;
)
(
)
(
y
y
y
x
Wydłużenie warstwy odległej o y od warstwy obojętnej
)
(
)
(
)
(
y
y
y
x
z
y
;
)
(
y
E
y
x
z
y
y
y
x
dy
dA
M
g
x
=
E
b
h/2
A
A
x
ix
ydA
E
dA
F
0
0
Warstwa obojętna zawiera środek
ciężkości
przekroju poprzecznego (Oz=Oz
c
)
Warunki równowagi
A
g
2
A
g
x
iz
M
dA
y
E
;
0
M
dA
y
M
A
A
x
iy
;
0
ydA
z
E
;
0
dA
z
M
E=const.,
=const.
;
I
ydA
z
;
I
dA
y
A
z
y
A
z
2
C
C
C
Moment bezwładności przekroju
poprzecznego względem osi z
c
Moment bezwładności przekroju
poprzecznegowzględem układu osi
y
c
z
c
Wprowadzając oznaczenia
Mamy:
;
0
I
E
;
M
I
E
C
C
C
z
y
g
z
;
0
I
C
C
z
y
;
)
(
y
E
y
x
;
)
(
y
I
M
y
C
z
g
x
z
g
max
z
g
max
W
M
y
J
M
C
max
y
J
W
zc
z
Wskaźnik przekroju
2
2
2
/
3
2
2
2
dx
w
d
dx
dw
1
dx
w
d
1
z
g
J
M
E
z
g
2
2
EJ
M
dx
w
d
w
– przemieszczenie warstwy obojętnej
Równanie różniczkowe linii
ugięcia
w
x
w(x)
nieodkształcona warstwa
obojętna
Warstwa obojętna
po odkształceniu
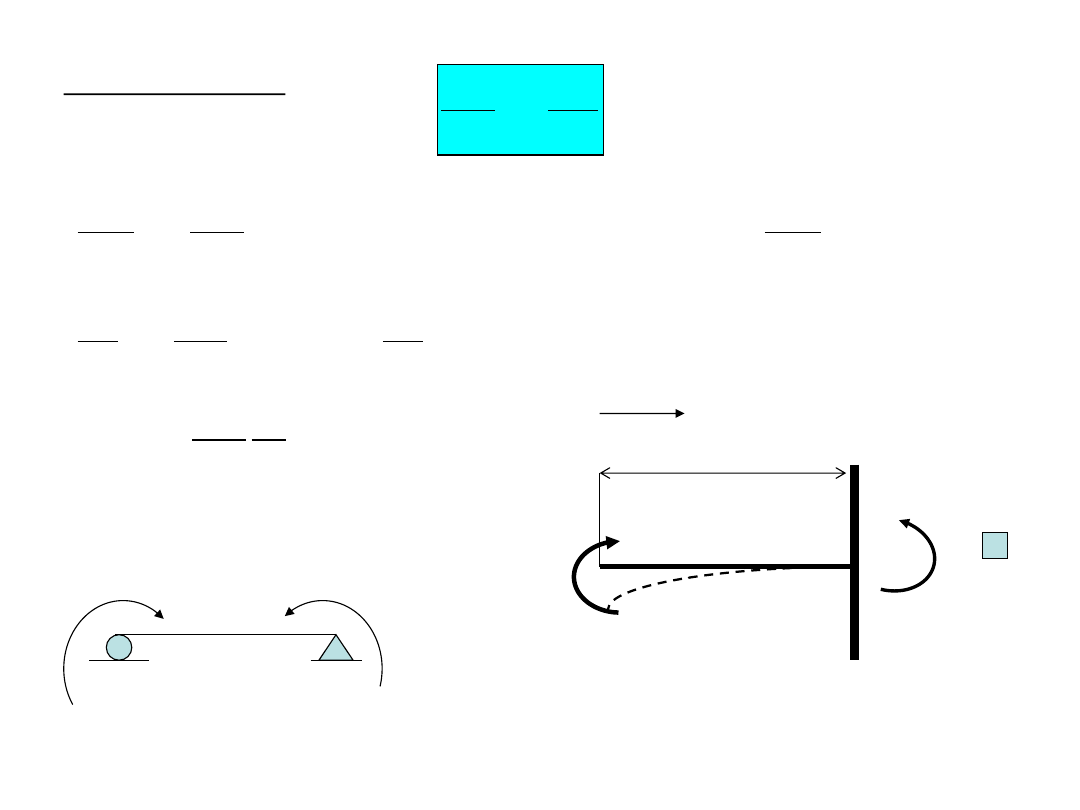
Warunki brzegowe
z
g
2
2
EJ
M
dx
w
d
''
.
.
;
2
2
2
2
w
dx
w
d
const
EJ
const
M
EJ
M
dx
w
d
z
g
z
g
;
2
)
(
'
;
2
1
2
1
C
x
C
x
EJ
M
x
w
w
dx
dw
C
x
EJ
M
dx
dw
z
g
z
g
C
1
i C
2
– stałe całkowania
x
M
u
l
x=l w(l)=0
x=l w’(l)=0
M
g
M
g
M
g
x=0 w(0)=0
x=l w(l)=0
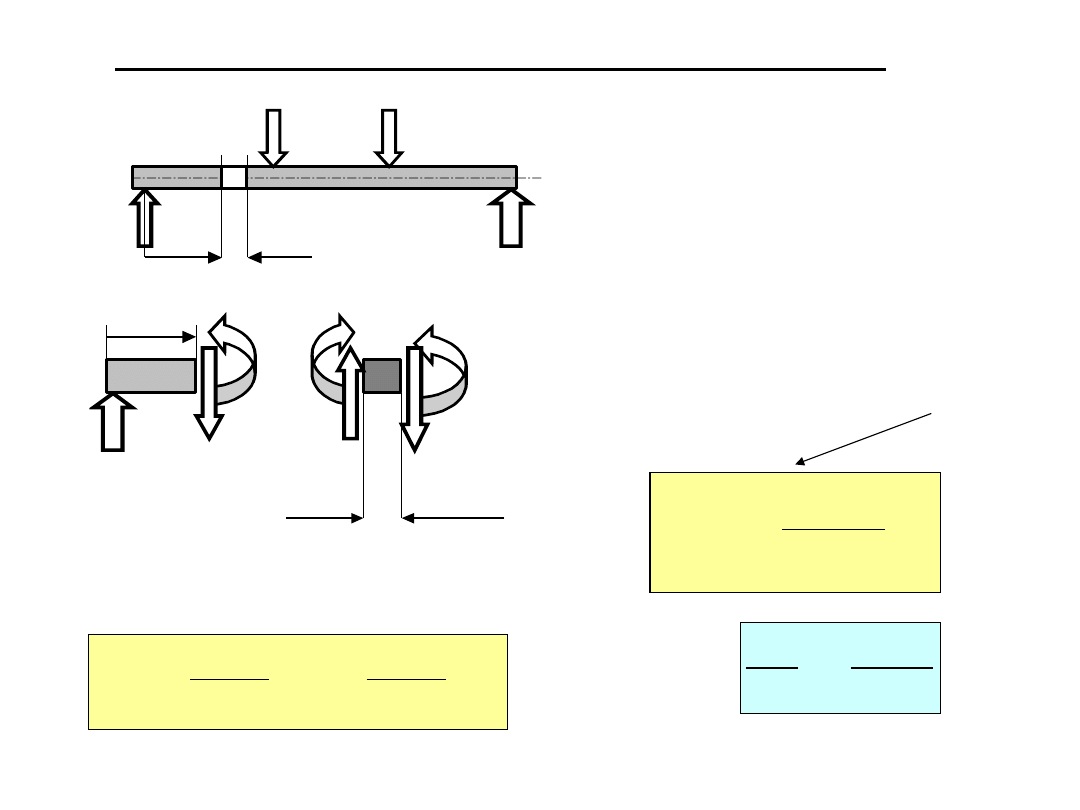
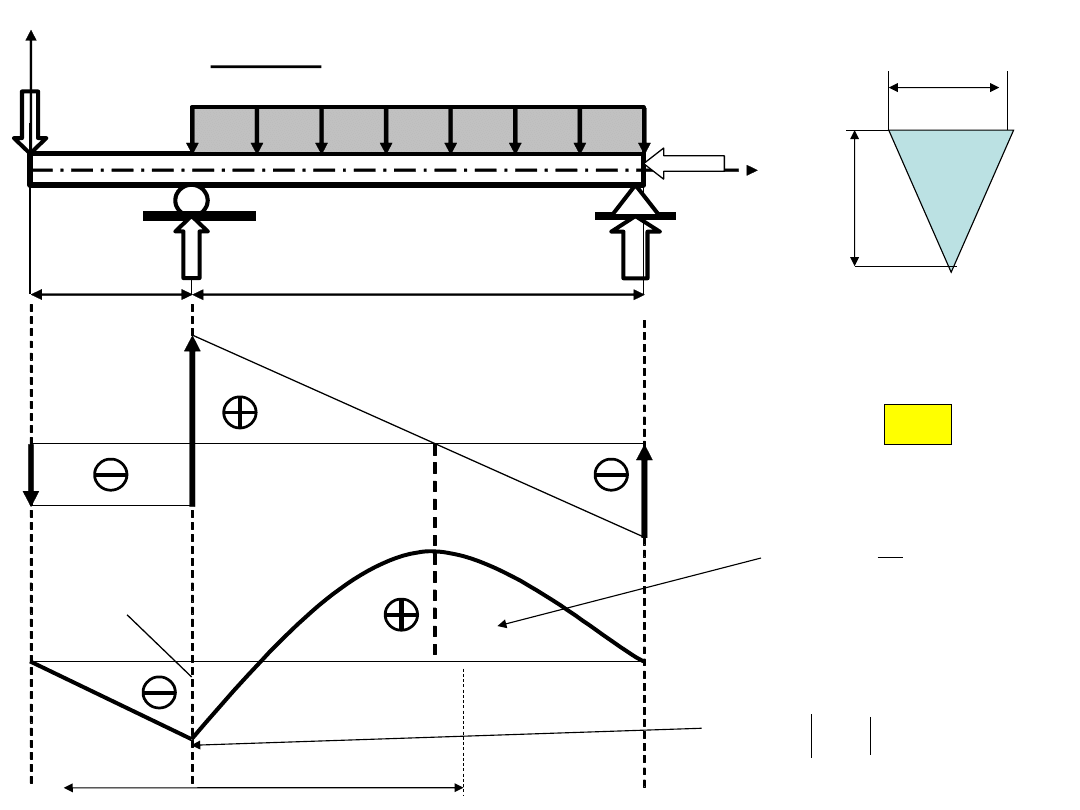
Naprężenia od zginania w belkach obciążonych poprzecznie
dx
x
dx
T
x
+dT
x
T
x
M
gx
R
1
M
g
+dM
gx
R
2
P
1
T
x
P
2
x
R
1
a)
.
;
0
const
M
T
g
x
;
)
(
)
(
y
I
x
M
y
C
z
g
x
Uogólnienie wzorów wyprowadzonych
dla czystego zginania
gdy k
r
=k
c
g
g
z
g
g
k
W
M
y
J
M
C
min
max
max
max
max
z
g
EJ
x
M
dx
w
d
)
(
2
2
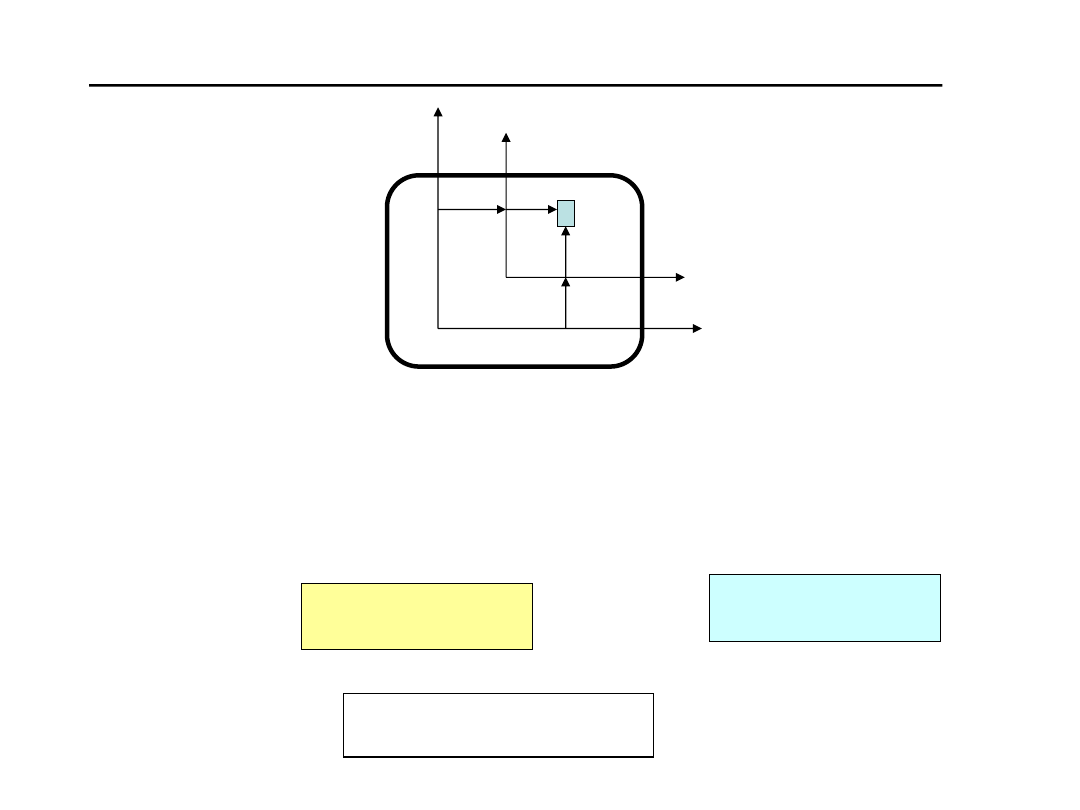
Teoria bezwładności figur płaskich
A
dA
z
y
;
;
2
2
dA
z
I
dA
y
I
A
y
A
z
r
O
Moment bezwładności względem osi
;
;
2
A
zy
y
A
z
O
yzdA
I
I
I
dA
r
I
Moment bezwładności względem punktu O
Moment bezwładności względem układu osi
Moment dewiacyjny
=0, gdy jedna z osi jest osią symetrii
Twierdzenie Steinera (momenty bezwładności względem osi równoległych)
C
O
z
y
z
C
y
C
dA
z
C
y
C
a
b
0
;
2
)
(
2
2
2
2
A
c
A
c
A
C
A
c
A
z
dA
y
A
a
dA
y
a
dA
y
dA
a
y
dA
y
I
A
a
I
I
C
z
z
2
A
b
I
I
C
y
y
2
A
b
a
I
I
C
C
y
z
zy
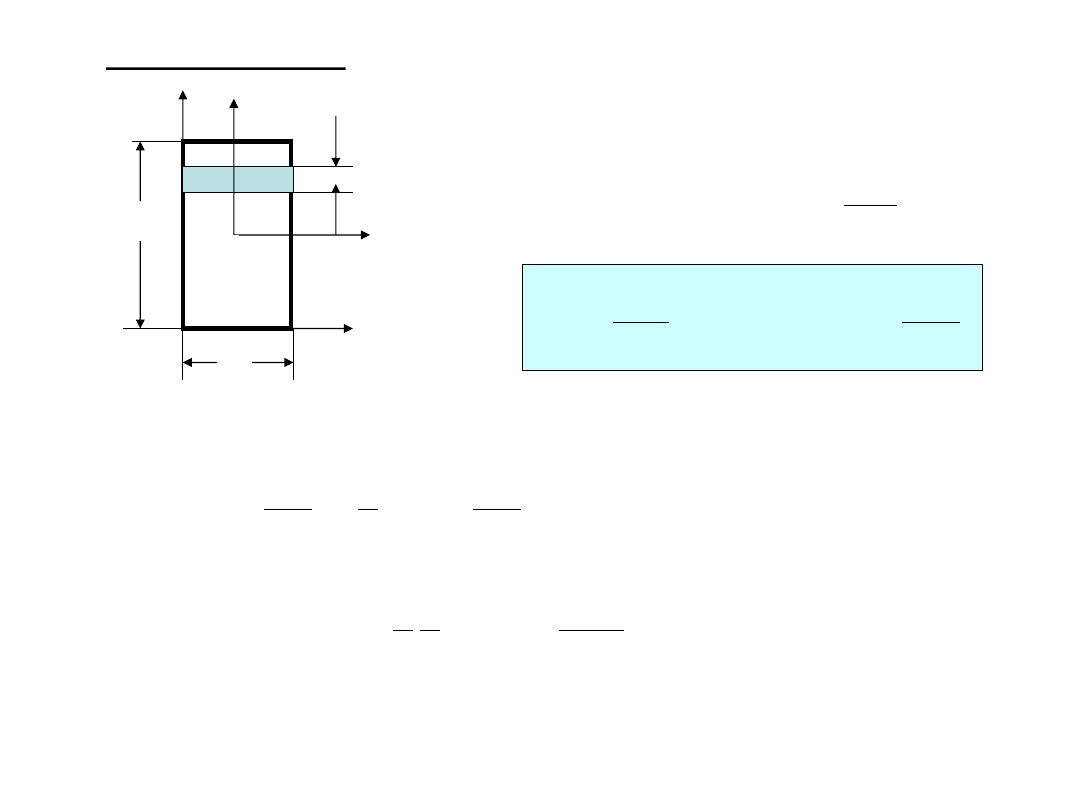
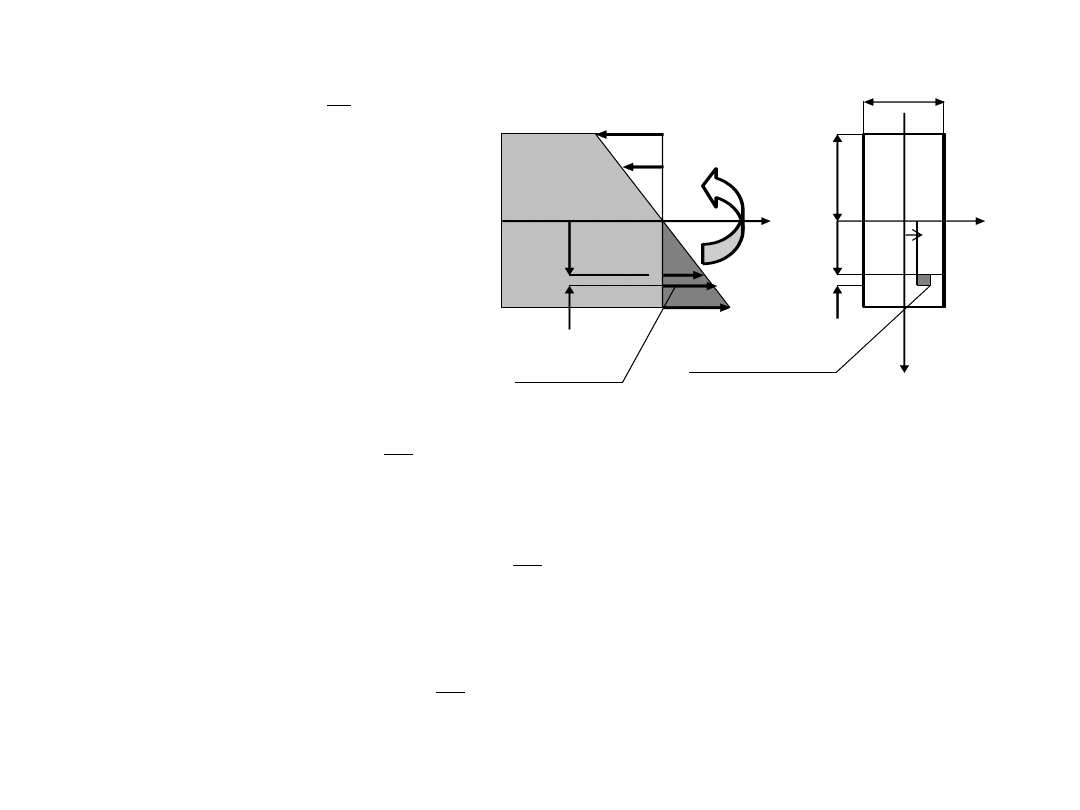
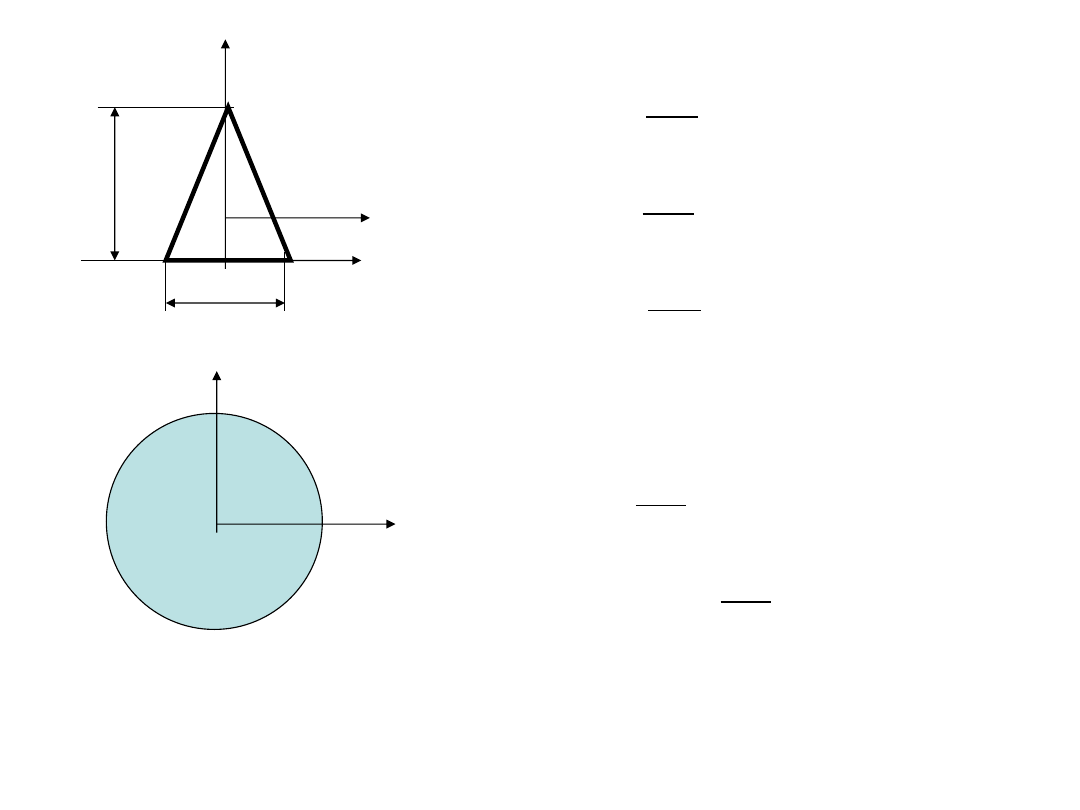
Podstawowe kształty
b
h
dy
y
C
z
C
y
C
12
;
3
2
/
2
/
2
bh
dy
b
y
I
bdy
dA
h
h
z
C
z
;
12
;
12
3
3
hb
I
bh
I
C
C
y
z
Zgodnie z twierdzeniem Steinera
;
3
2
12
3
2
3
bh
bh
h
bh
I
z
y
;
4
0
2
2
2
2
h
b
bh
h
b
I
I
C
C
y
z
zy
y=y
C
z
z
C
b
h
;
48
;
12
;
36
3
3
3
hb
I
bh
I
bh
I
C
C
y
z
z
O
z
C
y
C
;
4
;
2
4
4
r
I
I
r
I
C
C
y
z
O
z
z
C
y=y
C
r
;
11
,
0
2
3
4
8
)
(
;
8
)
4
(
2
1
;
3
4
4
2
2
4
2
4
4
r
r
r
r
A
y
I
I
r
r
I
I
r
y
C
z
z
y
z
c
C
R
BY
R
A
P=ql
x
2 l
q kN/m ]
l/2
R
BX
y
P
R
A
R
BY
T
x
M
gx
-Pl
7l /4
2
32
9
ql
M
gekstr
Przykład
20
30
l=0.5m
k
g
=160MPa
?
q
2
max
ql
Pl
M
g
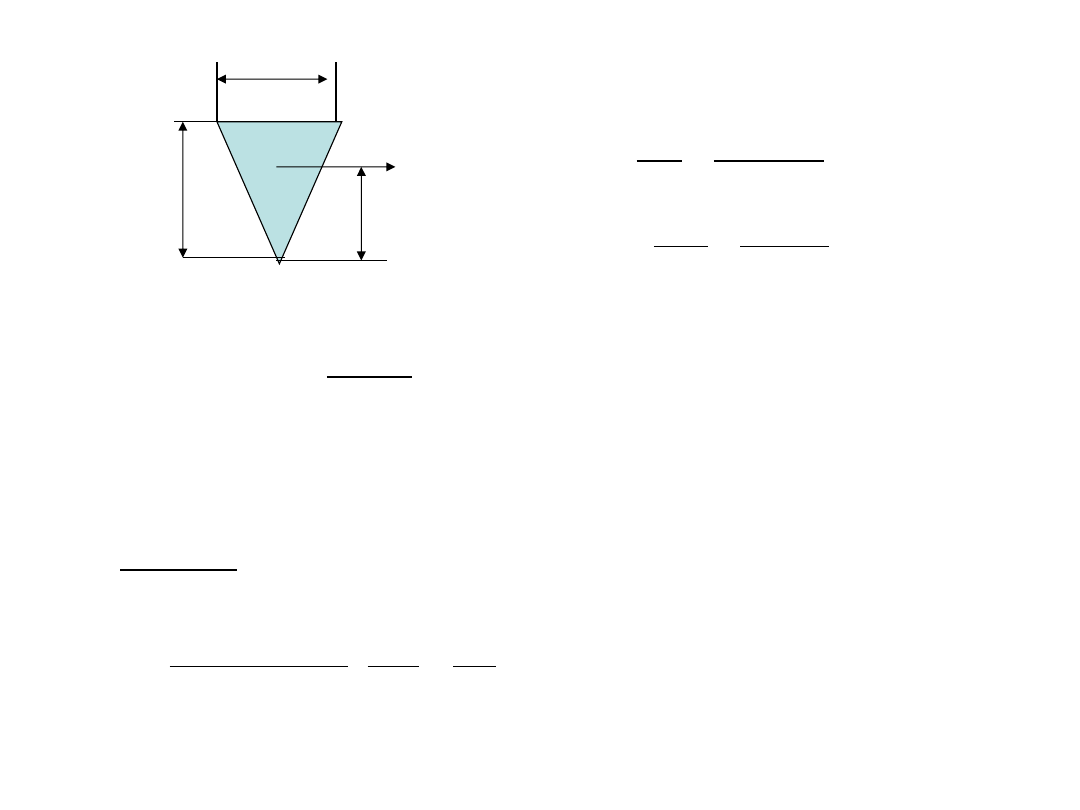
20
30
z
C
y
max
=20
;
10
75
,
0
20
10
5
,
1
;
10
5
,
1
36
)
30
(
20
36
3
3
4
max
min
4
4
3
3
mm
y
I
W
mm
bh
I
C
C
z
z
g
g
g
k
W
M
min
max
max
m
kN
mm
N
q
ql
ql
M
g
2
3
3
2
2
max
500
10
75
,
0
160
;
160
10
75
,
0
;
m
kN
q
/
48
,
0
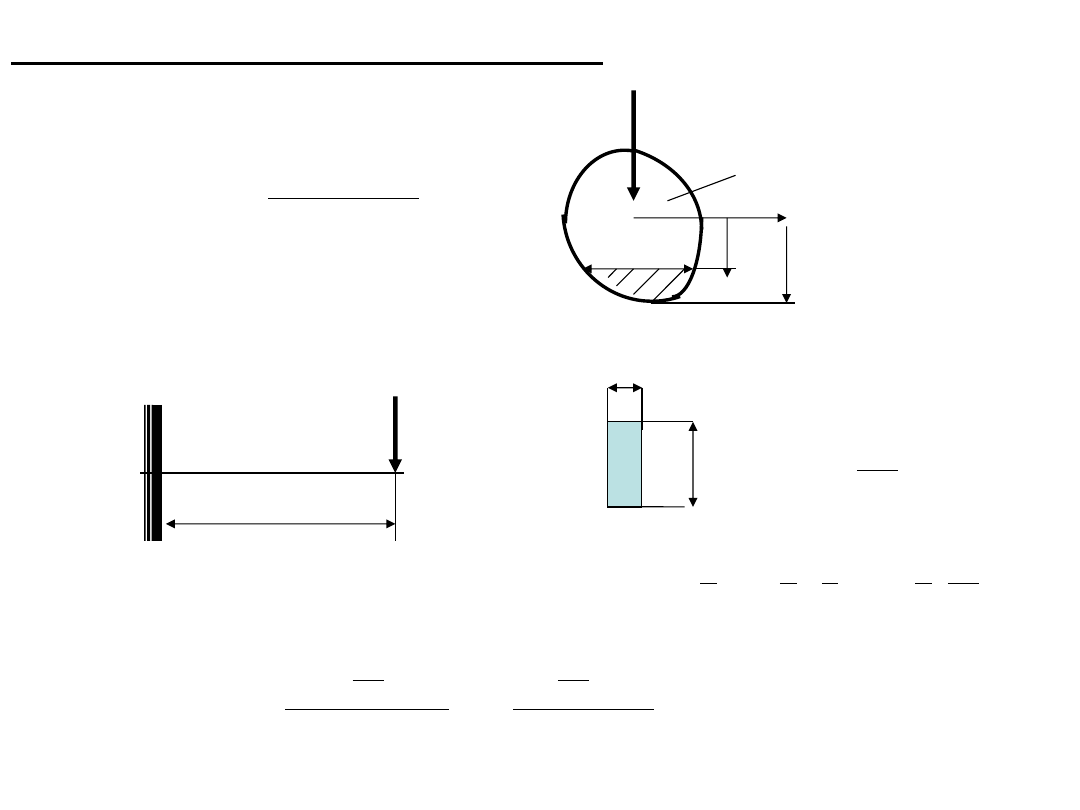
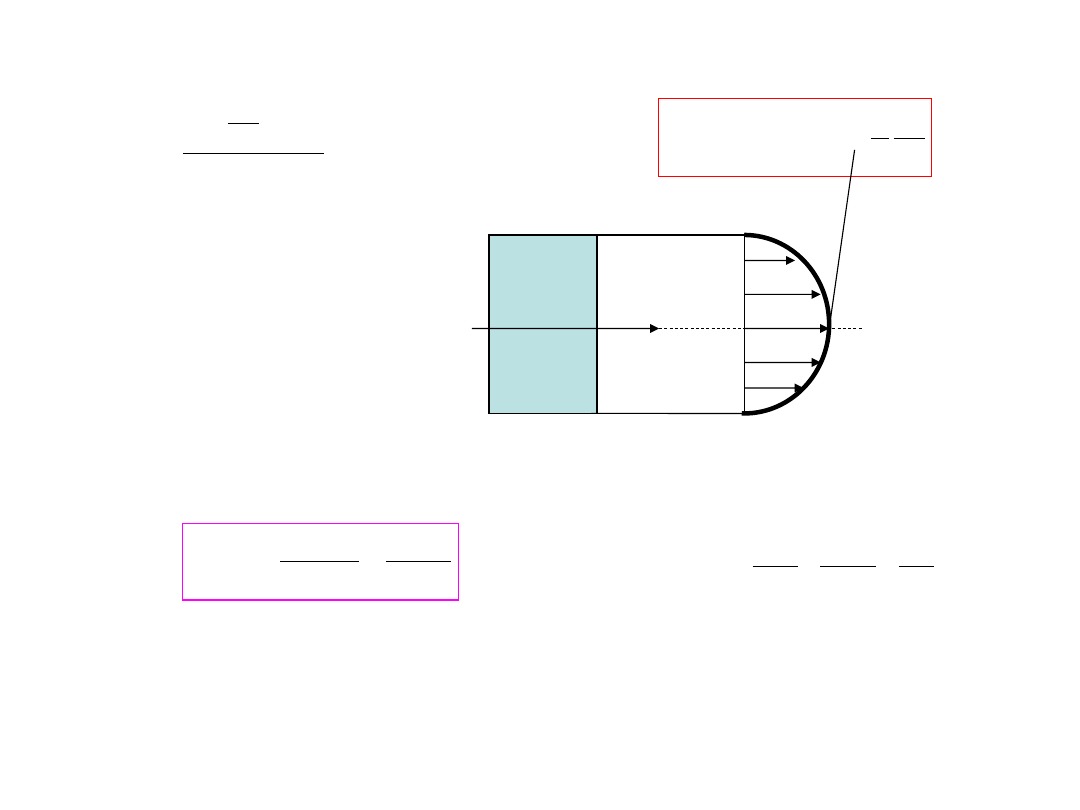
Naprężenia tnące przy zginaniu – wzór Żurawskiego
P
l
h
b
zc
y
y
x
I
)
y
(
b
S
T
)
y
,
x
(
max
T
x
z
C
b(y)
A
y
y
max
Przykład
T=const.=P
b(y)=const.=b
;
12
bh
I
3
zc
);
y
4
h
(
2
b
)
y
2
h
(
2
1
)
y
2
h
(
b
S
2
2
y
y
max
;
bh
)
y
4
h
(
P
6
12
h
b
b
2
)
y
4
h
(
b
P
)
y
(
3
2
2
3
2
2
;
bh
)
y
4
h
(
P
6
)
y
(
3
2
2
bh
P
2
3
)
0
y
(
max
;
0
)
2
/
h
y
(
Maksymalne naprężenia gnące w rozważanej belce
2
min
max
g
max
g
bh
l
P
6
W
M
;
6
bh
h
12
2
bh
y
I
W
2
3
max
zc
min
Gdy l=h
max
max
g
4
Gdy l=5h
max
max
g
20
Wyszukiwarka
Podobne podstrony:
Zginanie2 nap ug
4 Zginanie 2 nap ug
Zginanie2 nap ug id 589945 Nieznany
D ug celny(2)
9 Zginanie uko Ťne zbrojenie min beton skr¦Öpowany
Lęk i samoocena na podstawie Kościelak R Integracja społeczna umysłowo UG, Gdańsk 1995 ppt
obliczanie zginanych el sprezonych
cw7 (zginanie)
zginanie proste
Zginanie prętów obciążenie ciągłe
REGULAMIN PRAKTYK ZAWODOWYCH, UG, PRAKTYKI
PNOP 2, UG, Zarządzanie II sem, Podstawy nauki o przedsiębiorstwa
finanse przedsiaebiorstw 2311 107, Finanse przedsiębiorstwa UG
Pytania i odp Finanse Przedsiebiorstw(1), WZR UG, III semestr, Finanse przedsiębiorstw - dr Julia Ko
więcej podobnych podstron