Jolanta Kujawa
Ogólna teoria fizjoterapii
Anatomiczne i
fizjologiczne podstawy
fizjoterapii
Anatomiczne i fizjologiczne podstawy
fizjoterapii
Rola i funkcjonowania poszczególnych układów
anatomicznych nie powinno się oczywiście
rozpatrywać w oderwaniu od czynności innych
układów czy narządów.
Wśród struktur anatomicznych człowieka, z
punktu widzenia fizjoterapii najistotniejsze
znaczenie mają:
• skóra,
• cały układ ruchu,
• układ krążenia,
• układ oddychania.
Skóra
Rozróżnia się trzy warstwy; naskórek, skórę
właściwą i tkankę podskórną.
Te trzy warstwy posiadają właściwość ochronną –
przede wszystkim w stosunku do bodźców
mechanicznych, termicznych i chemicznych.
W skórze znajduje się cały szereg receptorów,
wśród których rozróżnia się wiele
wyspecjalizowanych na ogół zakończeń
nerwowych wrażliwych na różnego rodzaju
bodźce.
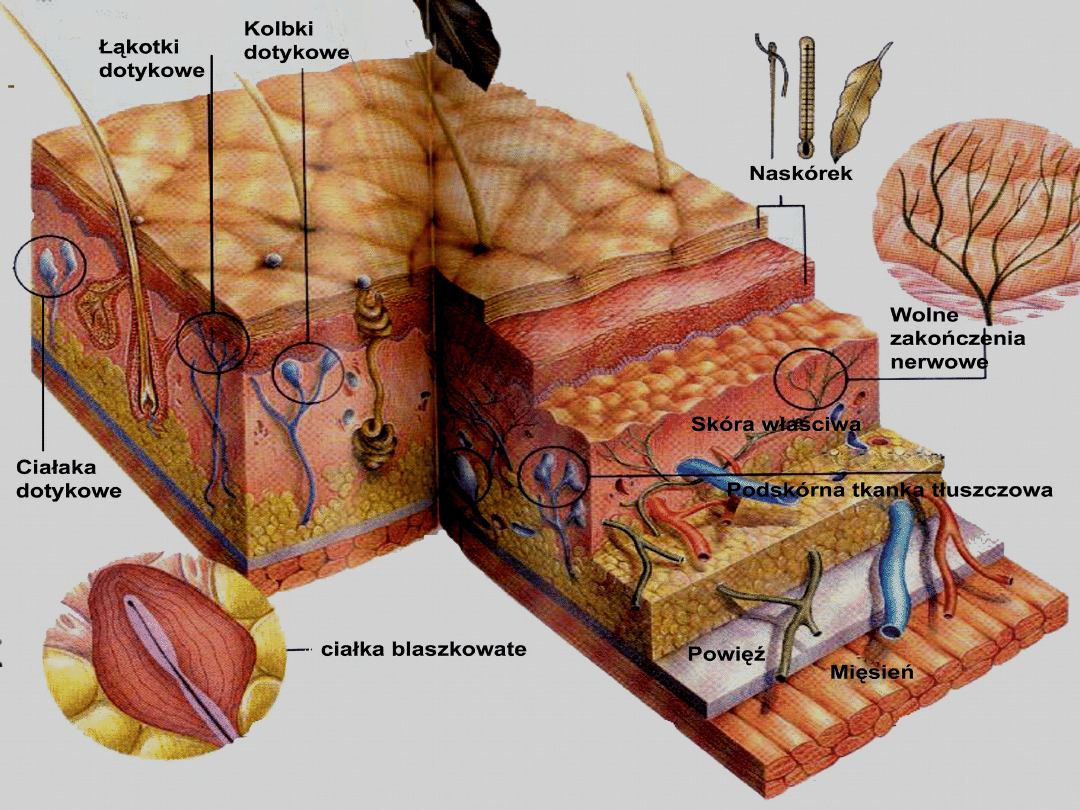
Ciałka zmysłowe
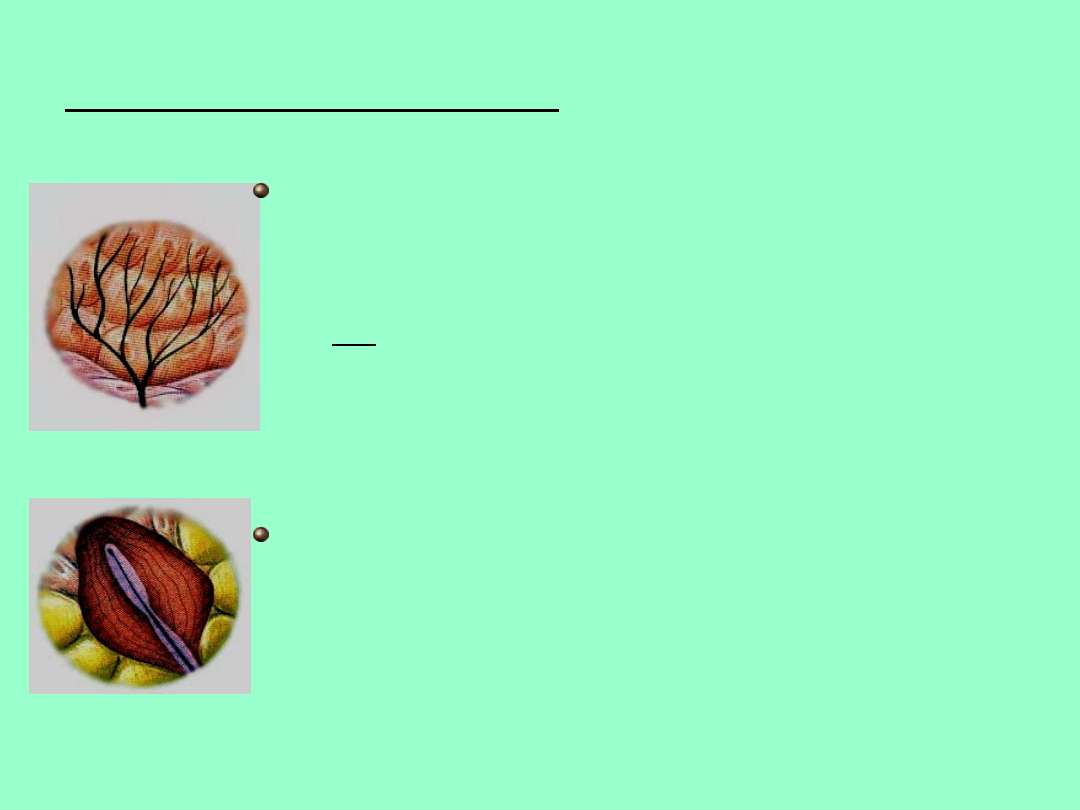
Receptory czuciowe
Wolne zakończenia nerwowe stanowią najczęściej
spotykane receptory czuciowe skóry. Reagują
właściwie na wszystkie bodźce dotykowe, od
muśnięcia do dużego nacisku: na ciepło, zimno i
na ból. Słabe pobudzenie tych zakończeń
nerwowych odczuwamy jako swędzenie.
Ciałka blaszkowate składają się jak
cebula z wielu warstw i tkwią głęboko
w skórze właściwej. Reagują na duży
nacisk oraz szybkie drgania – jak
wibracje kamertonu.
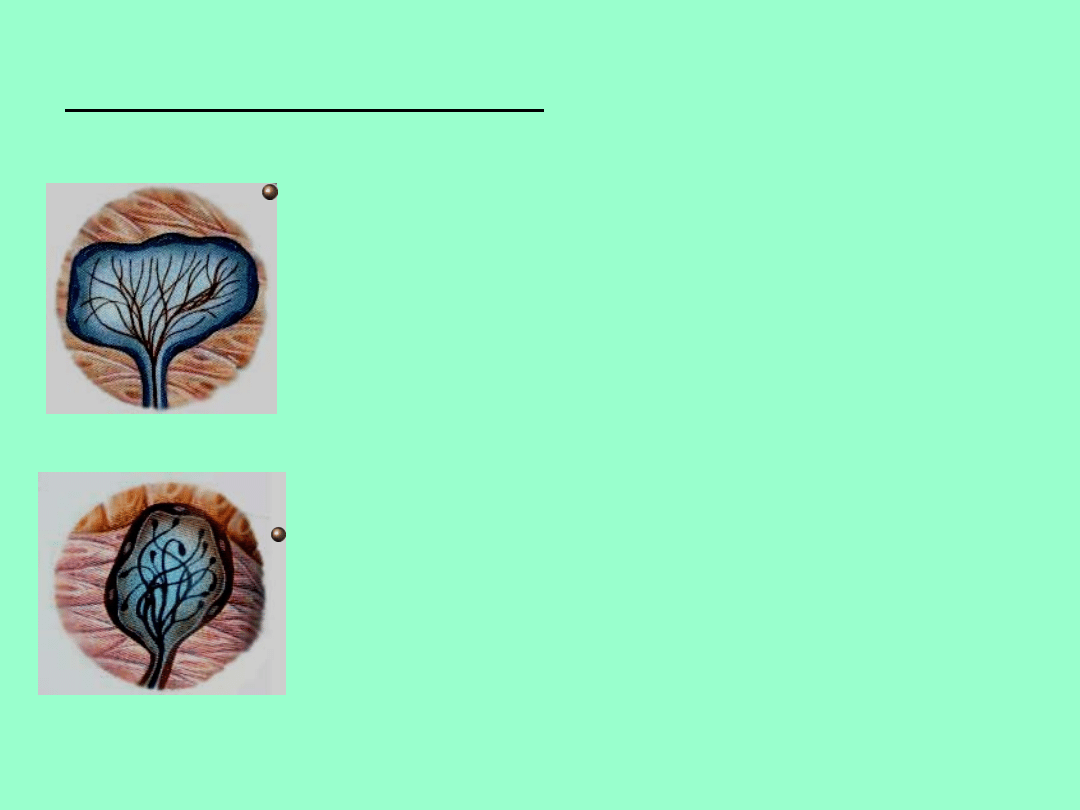
Receptory czuciowe
Ciałka zmysłowe (dawna nazwa: narządy
Ruffiniego) reagują na długotrwały nacisk lub
stopniową zmianę kształtu. Należą do grupy
adoptujących się mechanoreceptorów.
Znajdują się głównie w owłosionej skórze.
Mogą również reagować na skrajnie wysoką
temperaturę.
Ciałka dotykowe położone są w górnej
części skóry właściwej, szczególnie na
rękach, stopach, wargach oraz na
wewnętrznej powierzchni powiek. Te
jajowate mechanoreceptory
wykrywają lekki dotyk i wibracje.
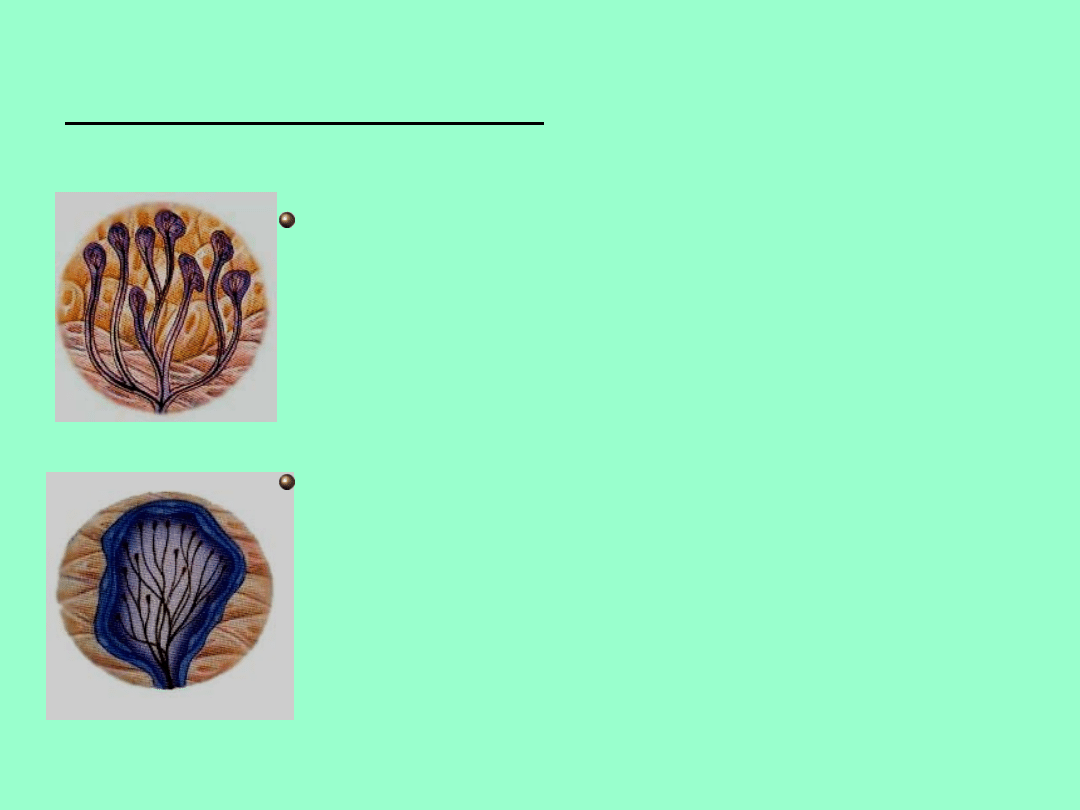
Receptory czuciowe
Łąkotki dotykowe reagują na niewielkie
odkształcenia, wykrywają zatem lekki
dotyk. Są wśród nich zarówno wolno, jak
i szybko adoptujące się
mechanoreceptory.
Kolbki końcowe są wielowarstwowymi
kapsułkami zawierającymi zakończenia
nerwowe o wielu odgałęzieniach. Należą do
grupy mechanoreceptorów reagujących na
szybkie zmiany kształtu, spowodowane
naciskiem lub wibracjami. Mogą także
uczestniczyć w odczuwaniu skrajnego zimna.
Łuki odruchowe
W powyższych receptorach biorą swój
początek liczne łuki odruchowe, dzięki
którym realizowane są m.in. niektóre
reakcje ochronne, czego przykładem może
być tzw. odruch ucieczki.
Podrażnienie receptorów skórnych stanowi
źródło bodźców, które przez ośrodkowy
układ nerwowy mogą wywierać wpływ na
rozmaite narządy i układy.
Odczyn ogólny
Dzięki bogatej sieci naczyń włosowatych
oraz zawartym w skórze gruczołom
potowym, skóra odgrywa tez znaczącą rolę
w gospodarce cieplnej oraz gospodarce
wodno – elektrolitowej ustroju.
W wyniku uczynnienia ciał
histaminopochodnych
i acetylochoniny wytwarzanej pod wpływem
działających bodźców z zawartej w skórze
choliny wytwarza się tzw. odczyn
naczyniowy.
Odczyn ogólny
Istotny jest sam fakt rozszerzenia się
naczyń skórnych, jako że rozszerzone
naczynia skórne mogą pomieścić około
jednej piątej części całej krwi, co może
mieć zasadnicze znaczenie dla
rozmieszczania się mas krwi
i ukrwienia różnych narządów.
Pod wpływem bodźców fizykalnych
zachodzą w skórze jeszcze takie
zjawiska jak np. reakcje fotochemiczne
czy elektrochemiczne.
Podporowa funkcja szkieletu
Podporowa funkcja szkieletu polega na
przeciwstawieniu się sile ciążenia oraz działaniu
innych sił.
Siły te mogą mieć różny kierunek:
Ściskanie
Rozciąganie
Zginanie
Skręcanie.
…oraz różny charakter;
Obciążenia statyczne
Obciążenia dynamiczne).
Zakres funkcji podporowej
Prawidłowa makro – i mikrobudowa.
Odpowiednia wytrzymałość kości; chrząstek
stawowych i torebek okołostawowych
(torebek, więzadeł i mięśni).
Torebki, więzadła i mięśnie muszą mieć
właściwą długość i elastyczność, co przy
dostatecznej sile mięśni i odpowiednim
sterowaniu ich czynnością gwarantuje
prawidłowe ustawienie sąsiednich odcinków
ciała względem siebie.
Zrównoważenie ciała
Zrównoważenie ciała i optymalny rozkład sił
ciążenia w pozycji pionowej zabezpiecza kilka
mechanizmów:
Dotyczące budowy,
Samej funkcji – ustawienia, ukształtowania.
• Np. w płaszczyźnie czołowej kręgosłup powinien być
„prosty”, kąty szyjkowo – udowe równe (normalnie 120
- 130°), a kolana „równomiernie koślawe – oczywiście w
granicach fizjologicznych (normalnie ok. 8°),
• W płaszczyźnie strzałkowej decydującą rolę odgrywa tu
odpowiednia wielkość fizjologicznych krzywizn
kręgosłupa oraz wielkość przodopochylenia miednicy
(normalnie ok. 30°).
Postawa ciała
Prawidłowe ukształtowanie układu kostno –
stawowego stanowi zaledwie podłoże
prawidłowej postawy ciała.
Właściwa długość miękkich elementów
gwarantuje możliwość prawidłowego ustawienia
sąsiednich segmentów, ale i stanowi rodzaj
stabilizatora tych segmentów.
Siła i wytrzymałość mięśni mogą być
stosunkowo niewielkie – rzuty środków ciężkości
(siły ciążenia) poszczególnych segmentów ciała
przebiegają bardzo blisko osi obrotów dużych
stawów, dzięki czemu siły te mogą być
równoważone przez małe siły mięśniowe.
System sterowania postawa ciała
Prawidłowości, związane z podporową funkcją
szkieletu, stanowią tez właściwe podłoże dla
sprawnego funkcjonowania systemu
sterowania (regulacji) postawą ciała.
Warunkuje to właściwy rozkład sił
ściskających
i rozciągających – działających na
proprioceptory, których ciągłe pobudzanie
stanowi niezbędne ogniwo systemu
sterowania postawą ciała.
Wymogi prawidłowej postawy ciała
1.
Zapewniać zrównoważenie i stabilność ciała
(dzięki prawidłowej budowie układu kostno
stawowego i mięśniowego, odpowiedniemu
umiejscowieniu środków ciężkości oraz
zrównoważeniu poszczególnych segmentów);
2.
Zapewniać ekonomię wydatku energetycznego
(w wyniku wykształcenia prawidłowego nawyku,
dzięki sprawnie działającemu mechanizmowi
regulującemu oraz właściwemu napięciu mięśni –
głownie antygrawitacyjnych);
Wymogi prawidłowej postawy ciała
3.
Zapewniać dogodna pozycję wyjściową dla ruchów
(poprzez odpowiedni zakres ruchomości
wszystkich stawów, optymalne napięcie torebek
stawowych i dobrą kondycję działania różnych
grup mięśniowych);
4.
Nie zaburzać czynności narządów wewnętrznych
(oddychania, krążenia, trawienia, wydalania);
5.
Zapewniać duża wydolność statyczno –
dynamiczną;
6.
Zapewniać „wymogi” estetyczne i psychologiczne.
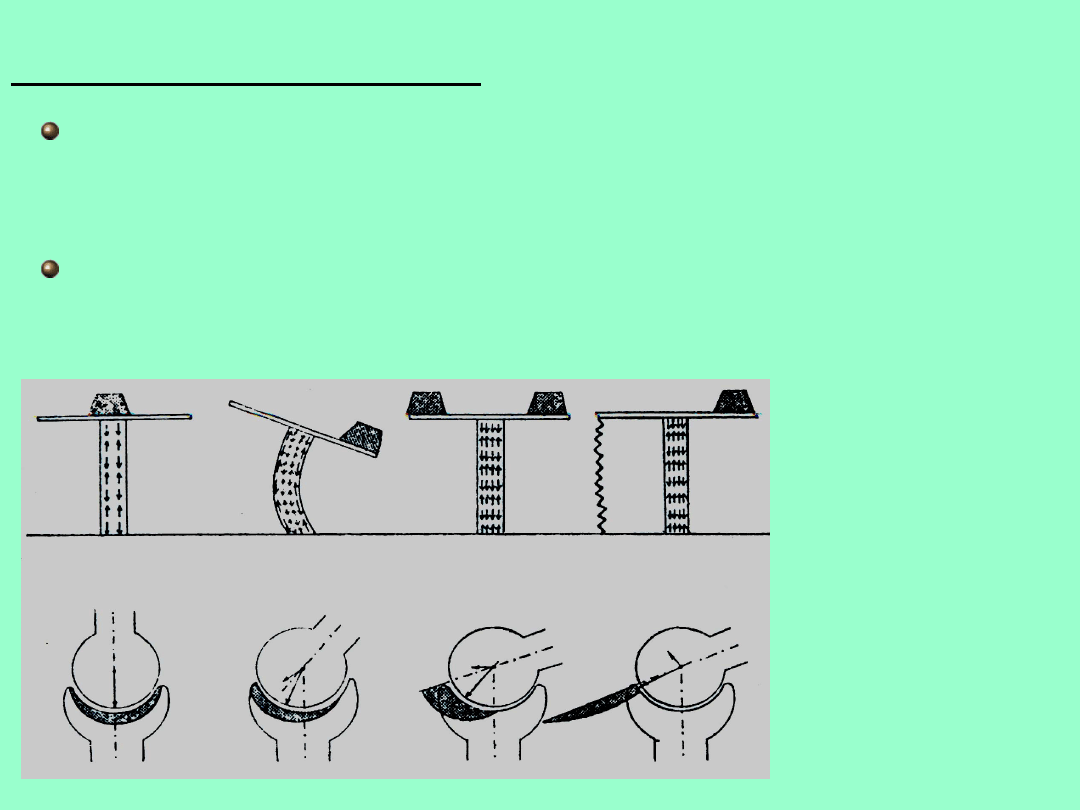
Siły działające na kość
W przypadku obciążeń statycznych, wytrzymałość ta
przewyższa wielokrotnie (20 – 50 razy) ciężar ciała i wynosi
12 – 17 kg na 1 mm
2
przekroju kości.
Wytrzymałość ta jest nieco mniejsza na rozciąganie i
najmniejsza na siły działające pozaosiowo (zginanie,
skręcanie, zwłaszcza gdy obciążenia mają charakter
dynamiczny).
A.
siły
działające na
kość.
B.
rozkład sił
działających
na staw w
zależności od
ustawienia
Wytrzymałość
Zmiany ułożenia ciała (przemieszczenia rzutu
środka ciężkości) oraz zmiany kąta ustawienia
stawów pociągają za sobą zmiany rozkładu sił
ściskających i rozciągających działających na kość,
a także zmiany wielkości sił przypadających na
jednostkę ruchową.
Z wytrzymałością wiąże się też sprężystość; ma to
spore znaczenie podczas operowania siłami
zewnętrznymi stosowanymi w kinezyterapii –
przekroczenie granicy sprężystości bądź
wytrzymałości może doprowadzić odpowiednio do
trwałego odkształcenia bądź zniszczenia (np.
przerwania tkanek poddawanych działaniu tych sił).
Ruchowa funkcja szkieletu
Zasadniczym czynnikiem decydującym o
ruchowej funkcji szkieletu są połączenia kości
.
Połączenia te dzielimy na:
Ścisłe – utworzone przez więzozrosty,
chrzęstozrosty, oraz kościozrosty;
Ruchome (stawowe) – zawierające jamę maziową.
• Połączenia ruchome dzielimy na:
Stawy rzeczywiste – z dwoma powierzchniami
stawowymi i szparą stawową;
Półstawy – nie zawierające kompletnej szpary
stawowej.
Ruchowa funkcja szkieletu
Ruchowa funkcja szkieletu wiąże się przede
wszystkim z działaniem kości jako dźwigni oraz
zagadnieniem ruchomości stawów, a mięśnie
stanowią źródło siły wszystkich czynności
ruchowych, ale ich ruch może być równie dobrze
spowodowany przyłożeniem siły zewnętrznej.
Ruchowa funkcja szkieletu
Rozróżnia się dwie dźwignie, które różnią się
one miejscem przyłożenia sił względem punktu
podparcia (osi obrotu) oraz kierunkiem działania
różnych sił na dźwignię (np. siły ciążenia i
przeciwstawiającej się siły mięśniowej):
• Dzwignie dwustronne – charakteryzuje je
jednokierunkowe działanie obu sil (zewnętrznej i
przeciwdziałającej), zlokalizowanych jednak po obu
stronach osi obrotu i odgrywają role w statyce ciała.
• Dźwignie jednostronne – działają w kierunkach
przeciwnych, lecz są przyłożone po tej samej stronie w
stosunku do osi obrotu.
Ruchomość stawów - gibkość
Ruchomość stawów ma uwarunkowania w swojej
budowie.
Kostne elementy okołostawowe pełnią przy tym
role jakby „ogranicznika ruchu”, wpływając na
jego zakres.
Miękkie elementy okołostawowe (torebki,
więzadła, mięśnie) również mają wpływ na
ruchomość, ograniczając ruch w nadmiernym
zakresie lub wykluczając ruch w jakieś
płaszczyźnie.
Osteokinematyka i artrokinematyka
Osteokinematyka – obejmuje ruchy elementów
kostnych (dźwigni) w przestrzeni, mających w
sensie mechanicznym zawsze charakter ruchów
obrotowych.
Artrokinematyka – opisuje stosunki zachodzące
pomiędzy powierzchniami sąsiednich stawów;
Przetaczanie – z ruchem tym mamy do czynienia gdy w
trakcie wykonywania ruchu coraz to nowe powierzchnie
stawowe stykają się ze sobą, a po stronie w którą ten ruch
jest wykonywany dochodzi do kompresji stawowych, a po
przeciwnej do ich separacji.
Poślizg – podczas tego ruchu stały punkt odniesienia na
jednej powierzchni stawowej wchodzi w kontakt z coraz to
nowymi punktami drugiej powierzchni.
Ruch poślizgu a ruch przetaczania
Specyficznym rodzajem ruchu poślizgu, jest tzw.
ruch jednopunktowy – podczas zginania ramienia
lub jego rotacji w warunkach odwiedzenia pod
katem prostym – gdzie stale dwa punkty
odniesienia stykają się z sobą podczas ruchu
kątowego.
Im większe jest dopasowanie tychże powierzchni -
np. w stawie biodrowym, czy ramienno łokciowym
- tym większa składowa poślizgu, a im większa ich
inkongruencja (spotykana w stawach śródręczno –
paliczkowych, kolanowym, czy ramiennym podczas
ruchów w płaszczyźnie horyzontalnej), tym
znaczniejszy jest udział przetaczania
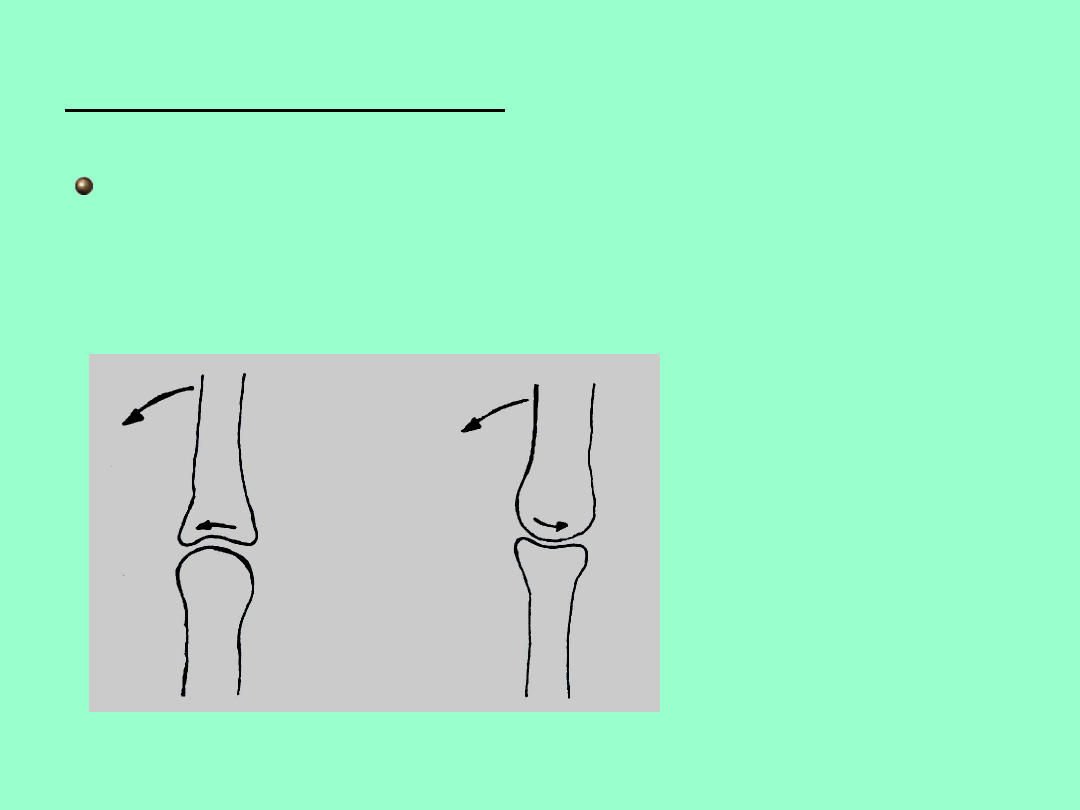
Kierunek poślizgu
Kierunek ślizgu
stawowego podczas
wykonywania ruchu
kątowego w zależności
od kształtu powierzchni
stawowej (wg reguły
wklęsło wypukłej ruchu
F.M. Kaltenborna)
Kierunek przetaczania jest zawsze zgodny z
kierunkiem wykonywanego ruchu kątowego,
natomiast kierunek poślizgu zależy od kształtu i
powierzchni stawowej.
Ruchomość stawów a ich budowa
Wszystkie powierzchnie stawowe są wycinkiem krzywej,
która nie jest stała, lecz z punktu na punktu zmienia się.
Mc Conaill wyróżnia 4 strukturalne typy stawów:
tzw. niezmieniony ovoidalny – stawy kuliste,
trzyosiowe (np. staw biodrowy, ramienny);
tzw. zmieniony ovoidalny – stawy elipsoidalne,
dwuosiowe (np. stawy śródręczno – paliczkowe II - V);
tzw. niezmieniony siodełkowaty – stawy
siodełkowate dwuosiowe (np. staw nadgarstkowo –
śródręczny kciuka);
tzw. zmieniony siodełkowaty – stawy zawiasowe,
jednoosiowe (np. stawy międzypaliczkowe).
Fizjologiczne rodzaje ruchu oporu
końcowego
Miękko elastyczny opór – dalszy ruch ogranicza bezpośredni
kontakt tkanek miękkich dwóch sąsiednich członów łańcucha
biokinematycznego (np. przy zginaniu stawu kolanowego czy
łokciowego), lub ograniczają go rozciągnięte mięśnie i ich
ścięgna (np. wyprost w stawie skokowym czy ramiennym);
Twardo elastyczny opór – występuje wówczas, gdy dalszy
ruch hamowany jest przez rozciągniętą torebkę stanowią i/lub
więzadła np. rotacja zewnętrzna i wewnętrzna stawu
biodrowego albo ramiennego, czy też wyprost w stawie
kolanowym);
Twarde zakończenie ruchu – typowe dla stawów, w których
dalszy ruch jest blokowany przez elementy chrzęstno – kostne
np. wyprost w stawie łokciowym).
Typy czucia końcowego (wg Cyriaxa)
Kości do kości – sytuacja, w której na końcu ruchu spotykają
się dwie twarde powierzchnie;
Typ torebkowy – dający bezpośrednie zatrzymanie ruchu;
Bez wyraźnej przyczyny – gdzie badający skarży się na
ból, a badający nie wyczuwa ograniczenia ruchomości;
Typ spazmatyczny – związany z obrona mięśniową,
wskazujący na ogół na ostry lub podostry stan zapalny stawu;
Typ sprężynującego zablokowania – kiedy wyczuwa się w
pewnym momencie „odbicie”, zwykle wskutek przemieszczeń
struktur wewnątrzstawowych;
Typ zbliżenia tkanek – kiedy to np. masy mięśniowe nie
pozwalają na dalsze zginanie kolana czy łokcia.
Mierniki ruchomości stawowej
Ruchy człowieka w życiu codziennym są złożone i
mają miejsce w ramach tzw. systemów lub
łańcuchów kinematycznych oraz przebiegają
„międzypłaszczyznowo”.
O globalnych możliwościach ruchowych decyduje
ruchomość wielu stawów tworzących powyższe
łańcuchy, dysponujące znaczna liczba stopnia
swobody.
Łączna liczba stopni swobody w stawach człowieka
wynosi 250.
Podczas izolowanego ruchu w jakimś stawie sąsiednie
odcinki ciała przemieszczają się względem siebie kątowo,
natomiast w życiu codziennym człowieka niektóre odcinki
łańcuchów kinematycznych przemieszczają się w
przestrzeni „prostoliniowo”, stanowiąc w tym względzie
wypadkową ruchów zachodzących w paru stawach.
CZYNNOŚCI MIĘŚNI
UKŁAD MIĘŚNIOWY STANOWI ŹRÓDŁO SIŁY
DLA WSZYSTKICH CZYNNOŚCI
RUCHOWYCH, A TAKŻE DLA UTRZYMANIA
PRZYJĘTEJ POZYCJI CIAŁA.
Istotą działania tego układu polega na
przekształcaniu energii chemicznej w
mechaniczną energię skurczu.

Funkcjonowanie mięśni
Funkcjonowanie poszczególnych mięśni
zależy przy tym od całego szeregu
czynników, m.in. takich jak:
LICZBA ZAWARTYCH W MIĘŚNIU WŁÓKIEN I ICH
DŁUGOŚĆ
GRUBOŚĆ UKŁAD ORAZ WIELKOŚĆ PRZEKROJU
DANEGO MIĘŚNIA
DŁUGOŚC I PRZEBIEG ŚCIĘGIEN
Wszystkie te czynniki decydują o sile, szybkości i
zakresie wykonywanych ruchów, a nawet o
przystosowaniu do pracy wykonywanej przez dany
mięsień.
Czynność mięśni
O czynności mięśni
decyduje też całokształt
procesów
bioenergetycznych oraz
zjawisk związanych z ich
pobudzaniem.
Pobudzanie natomiast
wiąże się z mechanizmami
nerwowymi oraz z
funkcjonowaniem pompy
sodowo – potasowej.
Funkcjonowanie pompy sodowo - potasowej
Spowodowanej bodźcem wędrówce jonów sodu do
wnętrza komórki i potasu na zewnątrz oraz ich
powrotowi towarzyszą zmiany potencjału związane
z de- i repolaryzacją błony, przy czym
rozprzestrzenianie się pobudzeń (ich przewodzenie)
może zachodzić w sposób ciągły lub skokowy.
Przewodzenie w sposób skokowy dotyczy włókien
nerwowych mielinowych (z przewężeniami
Ranviera) i jest szybsze niż przewodzenie ciągłe.
Wielkość powstałego i przewodzonego potencjału
czynnościowego zależy z kolei od siły bodźca, czasu
jego działania i uprzedniego stanu komórki.
Zjawisko czasowej niewrażliwości na bodźce
Komórka zdepolaryzowana nie reaguje
bowiem na bodźce przez okres rzędu 0,2 –
2 ms.
Jest to tzw. refrakcja bezwzględna w
odróżnieniu do względne, która dotyczy
jak gdyby zmniejszonej reaktywności na
zbyt częste bodźce, z czym wiąże się
przeważnie konieczność zwiększania ich
siły.
Pobudzenie i maksymalna siła
O pobudzeniu decyduje tzw. wskaźnik unerwienia
oraz liczba pobudzonych w danym momencie
jednostek motorycznych (siła jest w pewnym
względzie funkcja tej siły), a także częstotliwość
tych pobudzeń (rekrutacja przestrzenna i
czasowa).
Maksymalna siła zależy od wstępnego
rozciągnięcia włókien mięśniowych i może być
najwyższa wówczas, gdy stopień tego
rozciągnięcia jest rzędu 20% długości
rozluźnionego włókna.
Działanie mięśnia
O działaniu mięśnia decyduje również rodzaj
przeważających w nim włókien mięśniowych.
W fizjologii rozróżnia się dwa rodzaje tych włókien –
czerwone i białe.
Czerwone włókna oznaczone symbolem I lub St (slow
twich) kurczą się wolno a ich maksymalne napięcie rozwija
się w ciągu 80 ms.
• Włókna te charakteryzuje większy potencjał
oksydacyjny, z czym wiąże się z kolei wolniejsze
narastanie zmęczenia i większą zdolność do dłuższej
pracy.
Białe włókna oznaczone symbolem II lub FT (fast twich)
kurczą się szybciej , bo w ciągu ok. 30 ms, a ich metabolizm
cechuje większe nasilenie procesów beztlenowych, wobec
czego szybciej ulęgają zmęczeniu.
Podział funkcjonalny mięśni
Agonistyczne – mięśnie jednakowego działania.
Synergistyczne – mięśnie wspólnego działania.
Antagonistyczne – współdziałające z poprzednim,
ale poprzez przeciwdziałanie nadmiernemu ich
skurczowi (wykonują one pracę ekscentryczną,
wpływając w ten sposób na płynność i szybkość
ruchu).
Stabilizujące – ustalające odcinki ciała, które nie
biorą udziału w danym ruchu (np. stawy sąsiednie)
oraz umożliwiające ruch w niewłaściwej płaszczyźnie
(w stawach o większej liczbie stopni swobody).
Zapewniają także właściwą postawę podczas
wykonywania ruchu.
Powyższe stosunki nie są jednak stałe i zmieniają się w
zależności od różnych ruchów i przebiegu danego ruchu.
Nerwowe mechanizmy czynności ruchowych
Rola układu nerwowego w aparacie ruchu
polega na pobudzaniu koordynacji i
sterowaniu czynnością motoryczną mięśni
szkieletowych.
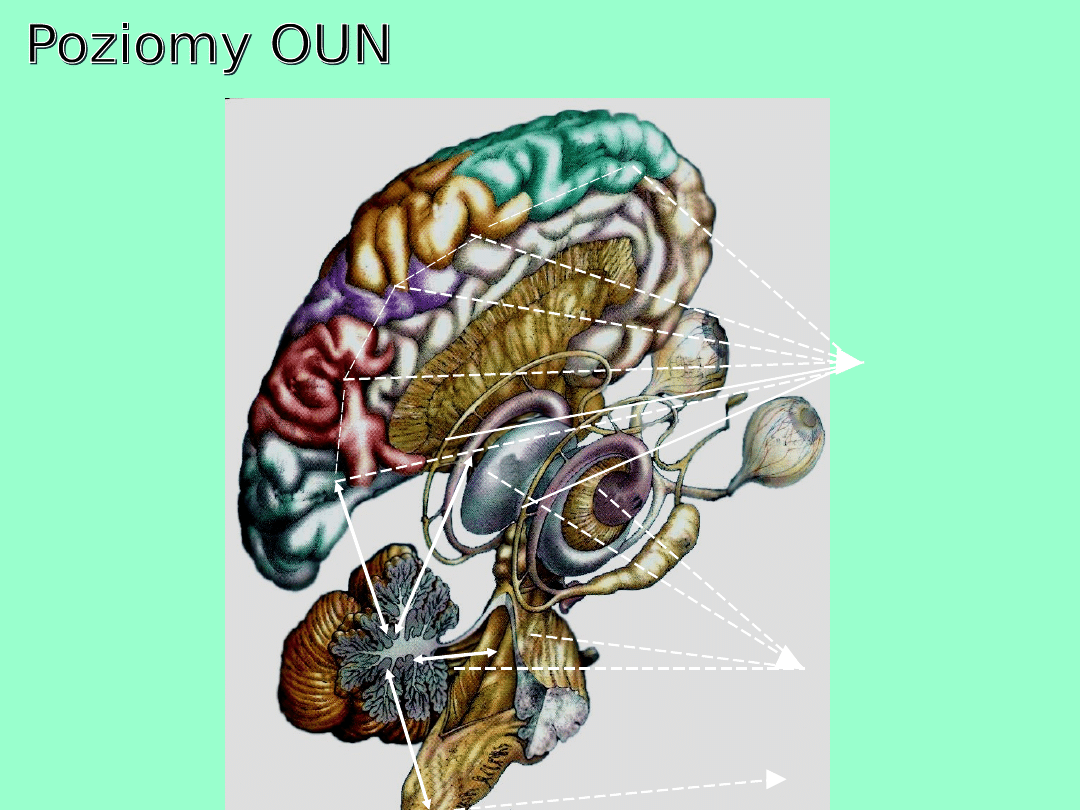
W zależności od rodzaju zadania
ruchowego, sterowanie ruchami zachodzi
na różnych poziomach ośrodkowego
układu ośrodkowego układu nerwowego
(o.u.n.).
Poziom korowy
Poziom korowy
Poziom najwyższy, korowy jest odpowiedzialny za
zaplanowane zadania ruchowe (strategia).
Idea zadania ruchowego powstaje w obszarach
układu limbicznego.
Po powstaniu zadania ruchowego zjawia się
bioelektryczny potencjał gotowości ok. 750-900
ms przed pojawieniem się czynności
bioelektrycznej w mięśniach powodujący ruch.
Poziom najwyższy obejmuje struktury kory
mózgowej takie jak: kora somatoruchowa, kora
wzrokowa, słuchowa, węchowa i smakowa oraz
kora obszarów kojarzeniowych.
Poziom średni - mózgowy
Tu strategia zostaje zmieniona w taktykę.
Poziom ten obejmuje ośrodki leżące w obrębie
rdzenia przedłużonego, mostu, śródmózgowia,
podwzgórza, wzgórza i jąder kresomózgowia.
Ośrodki te jak: układ siatkowy, jądra
przedsionkowe, nakrywka i oliwka dolna,
modyfikują fazowo i tonicznie aktywność
odcinkowych ośrodków odruchowych rdzenia
kręgowego.
Funkcje te są kontrolowane automatycznie i
działają poniżej poziomu świadomości.
Poziom rdzeniowy
Poziom najniższy, rdzeniowy, już tylko realizuje
taktyczne programy ruchowe, zamieniające je
w „swoje komendy”, tzn. w czynność mięśni,
którą kontroluje poprzez system odruchów
rozciągowych.
Wykonanie zadania ruchowego, czy utrzymanie
postawy ciała kierowane przez wymienione
struktury i funkcje trzech hierarchicznych
poziomów funkcjonalnych układu nerwowego,
jest ściśle związane z funkcją móżdżku –
koordynatora wszystkich funkcji ruchowych.
Poziom
pierwszy
Poziom drugi
Poziom trzeci
Kontrola
nerwowa
postawy ciała i
jego
ruchu jest
mechanizmem
neurofizjologicz-
nym
rządzącym
zachowaniem
ruchowym
człowieka, który
steruje
funkcjami
niezwykle
złożonych
struktur trzech
poziomów o.u.n.
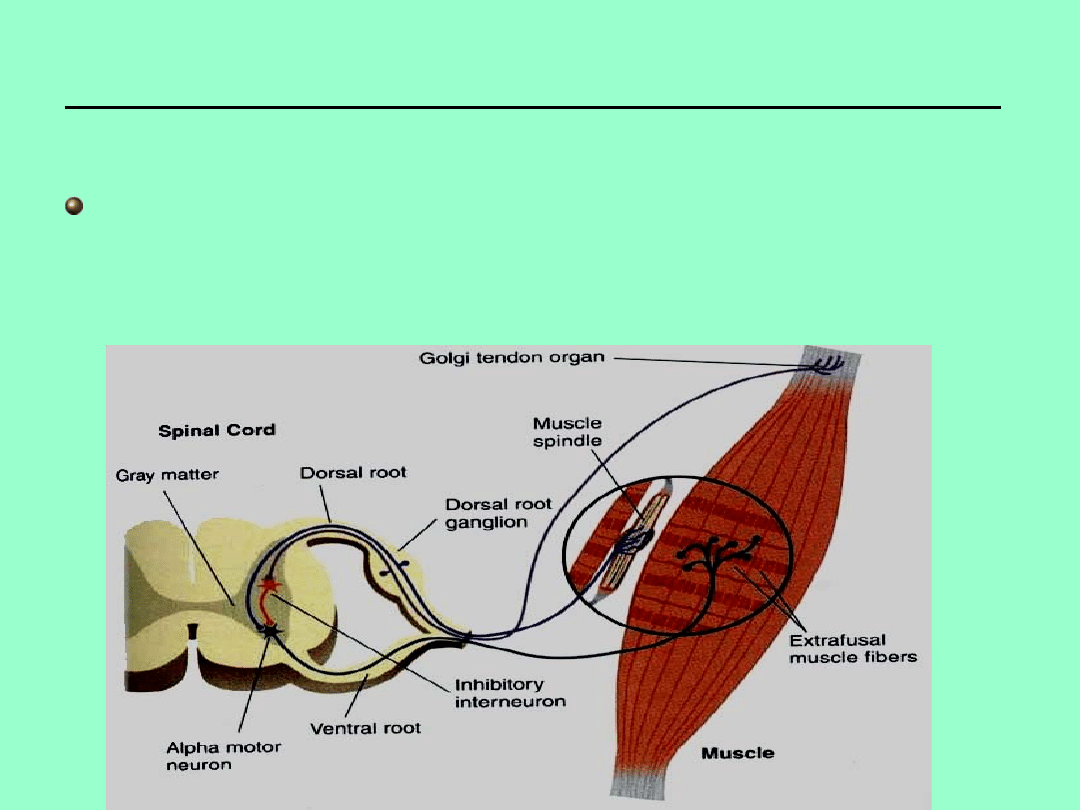
Nerwowe mechanizmy czynności ruchowych
U podłoża wszystkich czynności ruchowych leży odruch, będący
swego rodzaju łańcuchem przyczynowo – skutkowym, w którym
skutkiem jest odpowiedź mięśnia (efektora) na bodźce
działające na zakończenie nerwów czuciowych (receptory).
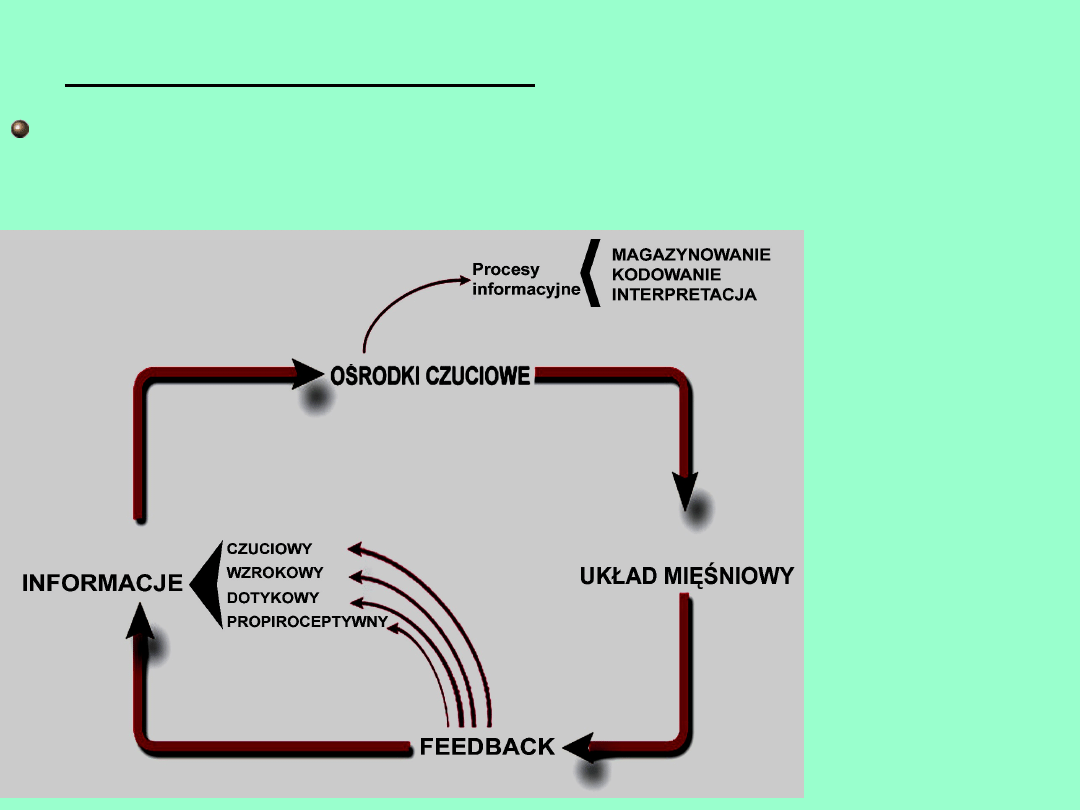
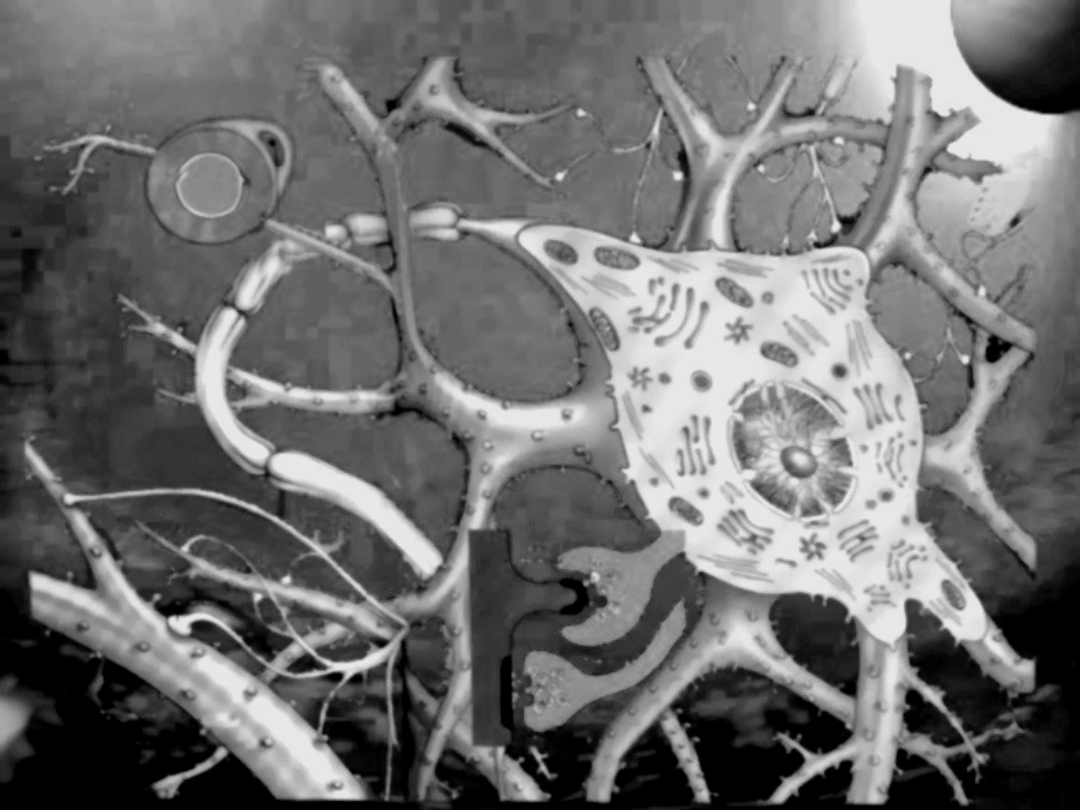
Sprzężenie zwrotne
W układzie nerwowym wzajemnemu oddziaływaniu
bioelektrycznemu neuronów towarzyszy wzajemne
oddziaływanie biochemiczne.
Transmisja synaptyczna odbywa się, bowiem za
pośrednictwem cząsteczek białek endogennych –
neuropeptydów.
Te neuroprzekaźniki (neurotransmitery), wydzielane
przez neurony w synapsach, są substancjami o silnym
działaniu biologicznym (noradrenalina, acetylocholina,
dopamina, serotonina), które działają przez własne
układy receptorowe, wpływają na funkcje układu
nerwowego zarówno somatycznego, jak i
autonomicznego.
Sprzężenie zwrotne
Neurotransmitery wiążą się z odpowiadającymi
receptorami, znajdującymi się na błonie
postsynaptycznej innych neuronów lub komórek
elektronowych, tj. mięśni lub gruczołów.
Sprzężenie zwrotne zapewniają wzajemne
połączenia czuciowo-ruchowe, występujące na
każdym poziomie osi nerwowej.
U człowieka ok. 1/3 wszystkich aksonów biegnących
w zstępujących drogach korowo-rdzeniowych
pochodzi od neuronów kory somatosenorycznej.
Sprzężenie zwrotne
Wykonywanie ruchów ręką, tzw. manipulacyjnych, wymaga
jednoczesnego wejścia informacji czuciowych od struktur układu
ruchu kończyny górnej, funkcjonującego jako sprzężenie
zwrotne.
Przejawem klinicznym
braku takiego sprzężenia
zwrotnego jest brak
koordynacji ruchowej,
czego przykładem jest
ataksja.
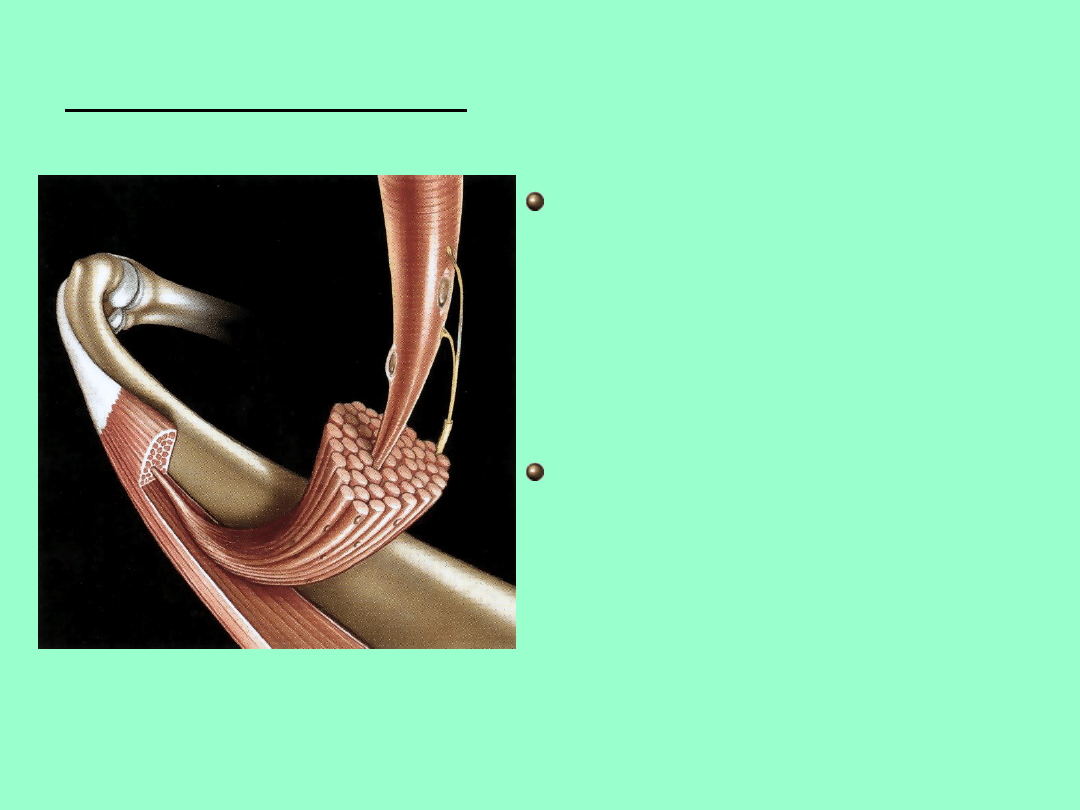
Najważniejsze proprioceptory
Proprioceptory mięśniowe – wrażliwe na
wydłużanie i skracanie poszczególnych mięśni.
Receptory stawowe, torebkowe i więzadłowe –
informujące przede wszystkim o kątach ustawienia
poszczególnych stawów oraz i szybkości zmian
ustawienia (odpowiednio receptory statyczne i
dynamiczne).
Receptory ucha wewnętrznego – informujące m.in.
o ustawieniu głowy i ułożeniu ciała względem pionu.
Telereceptor wzroku - położenie liniowe kątowe w
przestrzeni.
Inne receptory – ucisk, czynniki bólu i inne.
Akty ruchowe wg Moreckiego i wsp.
Nie wszystkie akty ruchowe bazują na sprzężeniu
zwrotnym – możliwości starowania ruchami są
zróżnicowane.
Morecki i wsp. wyróżniają trzy rodzaje aktów
ruchowych:
Ruchy mimowolne (odruchy) – realizowane bez sprzężenia
zwrotnego.
Ruchy balistyczne – sterowane ante factum.
Ruchy ciągłe – sterowane in facto.
Najbardziej skomplikowanych systemów sterowania
wymagają oczywiście ruchy ciągłe.
Część informacyjna układu nerwowego
Część informacyjna układu nerwowego bierze
swój początek w rozmaitych receptorach. Ze
względu na rozmieszczenie tych ostatnich, drogi
aferentne można podzielić na:
Eksteroreceptywne
Interoceptywne
Proprioceptywne
Wisceroceptywne
Największe ale nie wyłączne znaczenie dla motoryki i
kinezyterapii mają drogi proprioceptywne, dla
fizykoterapii zaś drogi rozpoczynające się
przedstawionych wcześniej eksteroreceptorach skórnych.
Drogi proprioceptywne
Drogi proprioceptywne zapoczątkowują receptory
zlokalizowane w mięśniach i ścięgnach oraz
receptory mieszczące się w torebkach, kościach,
okostnej i ochrzęstnej (wolne zakończenia
nerwowe, ciałka Vater – Paciniego, Ruffiniego i
Golgi-Mazzoniego).
Do układu tego należą również receptory kanałów
półkolistych błędnika, a wszystkie one łącznie
odbierają bodźce związane z czuciem głębokim
(są wrażliwe na ucisk, rozciąganie, ruch i
wibrację).
System nerwowy
Zarówno w układzie strukturalnym, jak i
funkcjonalnym system nerwowy należy
rozpatrywać jako jedność – ciągłość
strukturalną i biochemiczną.
Topograficzne rozmieszczenie układu
nerwowego w połączeniu z
biomechaniczną funkcją ciała ludzkiego
wymusza pewne, adaptacyjne zdolności
mechaniczne całego układu nerwowego.
Np. podczas ruchu wyprostu nadgarstka nerw
przyśrodkowy musi ulec „wydłużeniu” aż ok.
20%, a skłon tułowia w przód wydłuża kanał
kręgowy wraz z oponą twardą od 5 do 9 cm.
Mechanizmy adaptacyjne układu nerwowego
Układ nerwowy posiada dwojakiego rodzaju
mechanizmy adaptacyjne do zmian ustawienia
względem tkanek okolicznych.
Z jednej strony może wzrastać napięcie lub ciśnienie.
Np. bierne zgięcie szyi powoduje transmisje napięcia aż do
korzeni nerwowych odcinka lędźwiowo – krzyżowego.
Ruch jedną kończyną powoduje kontralateralne napięcie pni
nerwowych w drugiej kończynie.
Innym mechanizmem adaptacyjnym tego typu jest
wzrost ciśnienia wewnątrzneuronalnego, względnie
wewnątrzoponowego.
Np. zgięcie i odwiedzenia ramienia pociąga za sobą 4-krotny
wzrost ciśnienia w nerwie łokciowym w rowku nerwu
łokciowego
Ruch interneuronalny i ekstraneuronalny
Możliwe są przemieszczenia tkanki nerwowej
względem siebie (tzw. „ruch interneuronalny” – np.
ruch mózgu do rdzenia kręgowego względem
otaczającej je opony twardej, czy też ruchy włókien
nerwowych w stosunku do endoneurium) oraz tzw.
„ruch ekstraneuronalny” całego pnia nerwowego
( nerwu obwodowego, rdzenia kręgowego, korzonka
nerwowego) względem tkanek otaczających, a
zwłaszcza w obrębie pewnych naturalnych cieśni –
takich, jak np. m.supinator dla tylnej międzykostnej
gałęzi n. promieniowego, tunel nadgarstka, rowek
nerwu łokciowego, mięsień gruszkowaty dla nerwu
kulszowego czy więzadło żółte dla tylnej części
opony twardej.
Neurobiomechanika
Obok możliwości ruchowych w całym „ łożu” pnia nerwowego,
a zwłaszcza w miejscach cieśni, równe istotne znaczenie dla
neurobiomechaniki mają tzw. punkty napięciowe, czyli miejsca
przymocowania układu nerwowego dla otaczających układ
nerwowy tkanek lub miejsca, w których nie stwierdza się
naturalnej przesuwalności układu nerwowego.
W miejscach tych obserwuje się
charakterystyczny mechanizm
adaptacyjny
Autonomiczny układ nerwowy
Układ ten (pomijając układ parasynaptyczny) tworzą dwa
neurony – tzw. aksony przedzwojowe, zaczynające się w mózgu
lub rdzeniu, biegnące po sznurach bocznych substancji szarej i
wychodzące ponad nerwami czaszkowymi i korzeniami
brzusznymi tworząc zwoje autonomiczne oraz tzw. aksony
czołów i mięśni gładkich.
W każdym łańcuchu jest po ok. 21 - 25 zwojów.
W odcinku szyjnym pień ten położony jest od przodu
wyrostków poprzecznych, podobnie w odcinku piersiowym,
gdzie dodatkowo przymocowany jest on do głów żeber, tuż
w pobliżu stawów poprzeczno – żebrowych.
W odcinku lędźwiowo – krzyżowym, natomiast
przymocowany on jest przednio bocznie przy trzonach
kręgów, kości krzyżowej i kości ogonowej.
Przedzwojowe włókna dla głowy i szyi wychodzą z
segmentów C
8
-Th
5
, dla kończyn górnych z poziomu Th
2-10
, a
dla kończyn dolnych – Th
10
– L
2
.
Układ autonomiczny
W obrębie układu autonomicznego obserwuje się również
mechanizmy adaptacyjne do ruchu.
Obustronna w stosunku do kręgosłupa lokalizacja pnia
sympatycznego siła rzeczy wymusza pewna jego podatność na
ruchy kręgosłupa.
Skłon w bok rozciąga łańcuch sympatyczny po stronie
wypukłej, zgięcie rozciąga go obustronnie w odcinku
piersiowym i lędźwiowym, a wyprost w odcinku szyjnym.
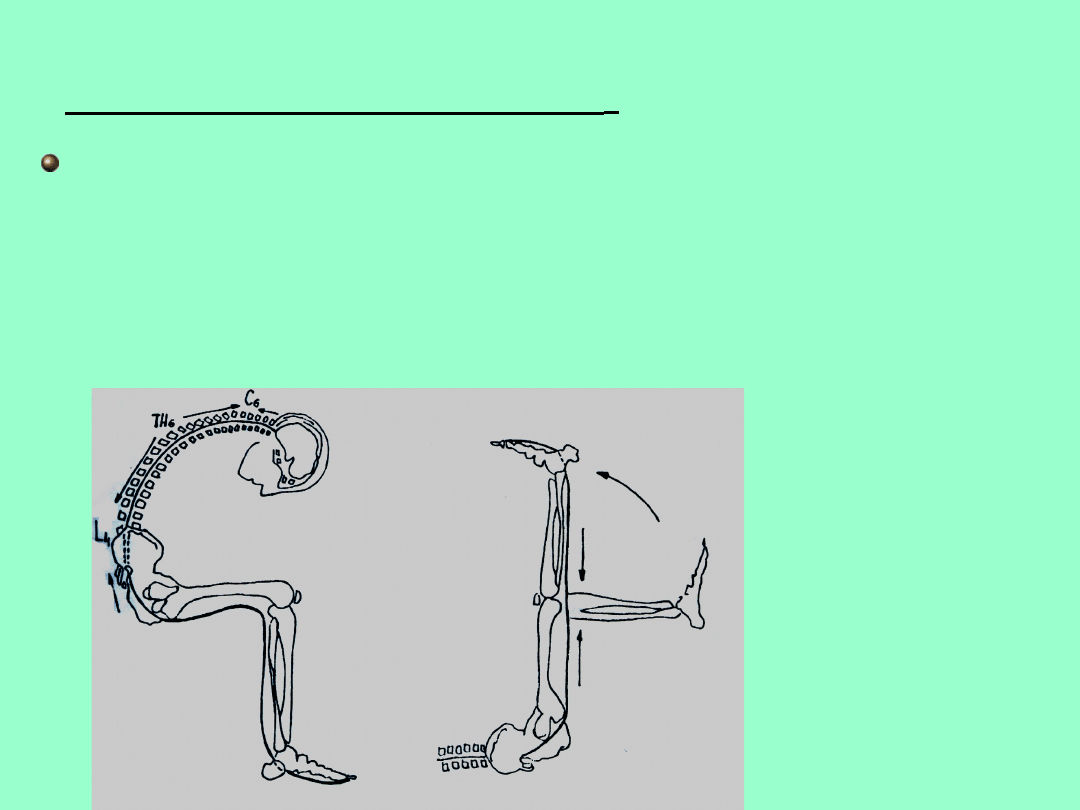
Ludzie długotrwale przebywający w pozycji „siadu przedniego”
trwale rozciągają zatem układ autonomiczny w piersiowym i
lędźwiowym odcinku , wtedy nawet skłon tułowia, czy globalny
ruch kończynami dolnymi czy górnymi może w pewnych
warunkach wyzwolić takie reakcje neurowegetatywne jak: bóle
głowy, bóle klatki piersiowej i brzucha, nudności, zmiany koloru
skóry oraz wzmożona potliwość.
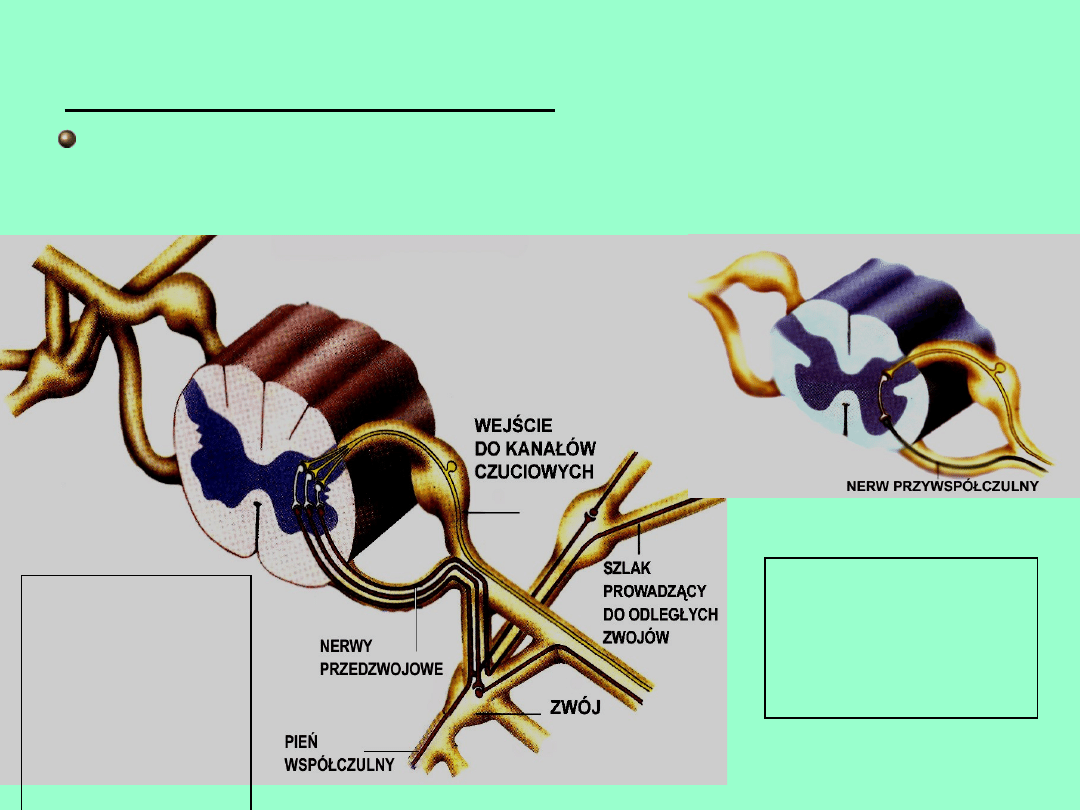
Układ autonomiczny
Układ
współczulny
przyspiesza
działanie
narządów
klatki
piersiowej, a
zwalania
działanie
narządów
jamy
brzusznej
Układ
przywspółczuln
y
działa
odwrotnie
Układ autonomiczny dzieli się na część współczulną i
przywspółczulną- wykazują antagonistyczne do siebie względem
działania w stosunku do różnych narządów wewnętrznych.
Nerwy obwodowe
Nerwy obwodowe zawierające w swoim przebiegu
włókna motoryczne, czuciowe oraz autonomiczne.
Akson posiadają własne mechanizmy ochronne na
rozciąganie
i ściskanie - przebiega on bowiem w endoneurium
falisto, co pozwala mu na pewien zakres rozciągania o
„poddawania się” naciskowi.
W przekroju poprzecznym , oprócz włókien nerwowych
nerwy obwodowe zbudowane są również z kilku warstw
tkanki łącznej, tworzącej;
• endoneurium,
• perineurium,
• epineurium,
• mezoneurium.
Unaczynienie nerwów obwodowych
Unaczynienie nerwów obwodowych jest tak
zorganizowane by w każdej sytuacji zabezpieczyć
dopływ krwi do pnia nerwowego.
Naczynia krwionośne nerwów obwodowych
posiadają pewien naturalny „luz” pozwalający na
normalne ukrwienie, niezależnie od pozycji nerwu w
stosunku do otaczających go tkanek, a także przy
pewnym ślizgu nerwu w swoim łożu.
Do zaburzenia cyrkulacji krwi dochodzi dopiero przy
elongacji o około 8%, a całkowity brak dopływu krwi
następuje przy rozciągnięciu nerwu o ok. 15%.
Funkcja układu nerwowego
Anatomicznie układ ten dzieli się na trzy zasadnicze
części: ośrodkową, obwodową, oraz autonomiczną.
Funkcjonalnie natomiast wyróżnia się cztery jego części:
Informacyjną (dośrodkową, aferentną) obejmującą neurony
przewodzące impulsy dośrodkowo i tworzącą drogi i ośrodki
dośrodkowe;
Autonomiczną (odśrodkową autonomiczną, eferentną
autonomiczną) zawierającą neurony przewodzące impulsy
odśrodkowo i tworząc ośrodki i drogi odśrodkowe, przewodzące
impulsy do mięśni gładkich, mięśnia sercowego lub gruczołów;
Ruchową (odśrodkową somatyczną), zawierającą neurony
przewodzące impulsy odśrodkowo i tworzącą ośrodki i drogi
przewodzące impulsy do mięśni szkieletowych;
Integrującą (nadrzędną), zawierającą neurony pośredniczące
pomiędzy układem aferentnym i eferentnym i tworzące ośrodki
nadrzędne, scalające powyższe w jedną czynnościową całość.
Typy receptorów stawowych wg Wyke`a
I typ receptorów – zlokalizowane w
zewnętrznej warstwie torebki stawowej –
posiadają niski próg pobudliwości – podstawowa
ich rola jest informowanie o ustawieniu
kątowym (pozycji) w stawie.
II typ receptorów – znajdują się w
wewnętrznej warstwie torebki stawowej-
posiadają niski próg pobudliwości – głównym ich
zadaniem jest kontrola krótkotrwałych zmian
napięcia torebki stawowej, czyli informowanie o
kierunkach wykonywanego ruchu.
Typy receptorów stawowych wg Wyke`a
III typ receptorów – zlokalizowany jest w
przyczepach ścięgien oraz więzadłach – ich próg
pobudliwości jest wysoki – poprzez informacje o
nadmiernym rozciąganiu więzadeł i ścięgien receptory
te działają hamująco na motoneurony, przy czym
bardzo szybko adaptują się one do działającego
bodźca.
IV typ receptorów – stanowią nocyceptory
wbudowane w całą torebkę stawową jak i więzadła –
posiadają wysoki próg pobudliwości, nie adaptują się
do działania bodźca o charakterze traumatyzującym-
receptory te wyzwalają ból oraz posiadają
reflektorycznie toniczny wpływ na mięśnie kręgosłupa i
kończyn (system γ) i analogiczny wpływ na układ
oddechowy oraz krążenia.
Część ruchowa układu nerwowego
Część ruchową układu nerwowego tworzą ośrodki
i drogi układu piramidowego oraz ośrodki układu
pozapiramidowego, a także jądra ruchowe
rdzenia, których neuryty stanowią wspólną drogę
końcową dla obu tych układów.
O.U.N. nie widzi pojedynczych mięśni i nie
zawiaduje nimi, lecz zarządza całymi
ruchami.
Układ limbiczny uważa się za system motywujący
ruch, odpowiadający za ruchy celowe, wpływający
też na emocje i układ wegetatywny oraz scalający
wrażenia zmysłowe (optyczno-kinetyczne).
Sterowanie na poziomie podkorowym
Poziom tez zarządza bowiem ważnymi funkcjami
sterowanymi na poziomie rdzeniowym i
„wydelikatnia” mechanizmy, a przed wszystkim:
przystosowuje poziom sterowania, pobudliwość
motoneuronów
i wyjściowa postawę;
w trakcie ruchu zapewnia płynną adaptację tych
przystosowanych wcześniej poziomów;
zapewnia utrzymanie ułożenia zorientowanego względem
grawitacji;
automatyzuje stereotypowe działania ruchowe i kontroluje je;
wytwarza tematy zastępcze.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
- Slide 60
- Slide 61
- Slide 62
- Slide 63
- Slide 64
- Slide 65
- Slide 66
Wyszukiwarka
Podobne podstrony:
7 Dodatek II Ogolna teoria pradu przemiennego
Teoria wychowania egzamin, Pedagogika - studia, II semestr - ogólna, Teoria wychowania
OGÓLNA TEORIA STRATEGII, semestr II, Strategia Bezpieczeństwa Narodowego, Materiały od wykładowcy
zagadnienia z terii mechanika, Prywatne, Budownictwo, Materiały, Semestr II, II semestr, mechanika o
mata teoria, Politechnika Slaska, studia zaoczne, rybnik, wydzial gornictwo i geologia, semestr II,
mata roler, Politechnika Slaska, studia zaoczne, rybnik, wydzial gornictwo i geologia, semestr II, m
Chrzastowska-3 teorie dramatu, Filologia polska I rok II st, Teoria literatury
IFiS UP syllabus epistemologia filozofia, Filozofia, II rok, Teoria poznania
Radcliffe-Brown„Wyspiarze z Andamanów” rozdz 5 streszczenie, kulturoznawstwo, II semestr, teoria kul
II kolos?dopy teoria
GiK Gleboznawstwo 15 16 II rok sem 4 zaoczni
ogólna teoria fizjoterapi kolos 1
sciaga rownanie rozniczkowe zupelne, AGH, I & II, Matematyka, Teoria
Wyrównywanie ubytków ruchowych, regeneracja, kompensacja,?aptacja Ogólna teoria Fizjoterapii
OGÓLNA TEORIA FIZYKOTERAPII
Finanse publiczne - ściąga II , Ogólna charakterystyka podstawowych kategorii wydatków
więcej podobnych podstron