UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
1
PODSTAWY AUTOMATYKI
PODSTAWY AUTOMATYKI
Prowadzący
Prowadzący
:
:
dr ing. Sebastian
dr ing. Sebastian
Kula
Kula
e-mail: wsk09@wp.pl
e-mail: wsk09@wp.pl
Uniwersytet Kazimierza Wielkiego w
Bydgoszczy
wykład V
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
2
zajęcia realizowane są w ramach
projektu pt. “Mechatronika
kierunkiem przyszłości –
dostosowanie oferty edukacyjnej
Uniwersytetu Kazimierza
Wielkiego do potrzeb rynku
pracy”, Działanie 4.1.1, Programu
Operacyjnego Kapitał Ludzki,
współfinansowanego ze środków
Europejskiego Funduszu
Społecznego”.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
3
Plan wykładu
•Konstrukcje robotów.
•Chwytaki robotów.
•Sensoryka robotów.
•Kinematyka robotów.
•Dynamika robotów.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
4
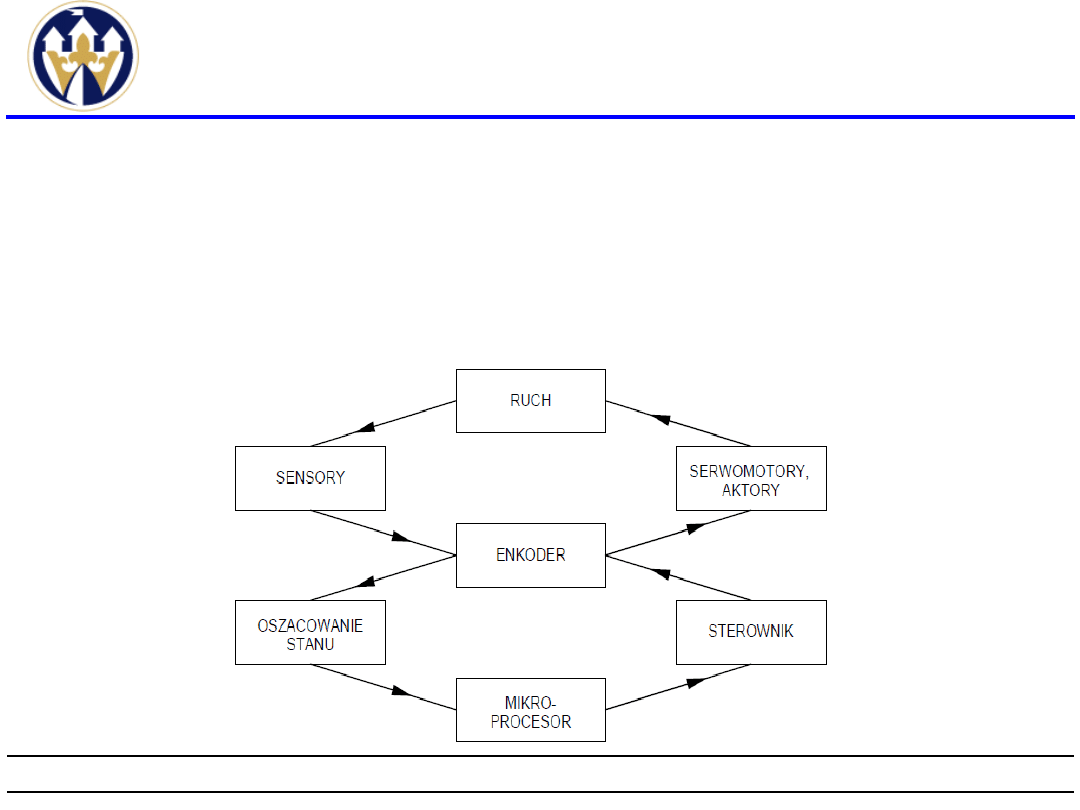
Konstrukcje robotów(1)
Robot jest to urządzenie przeznaczone do
realizacji niektórych funkcji manipulacyjnych i
lokomocyjnych człowieka, posiadające określony
poziom energetyczny, informacyjny i inteligencji
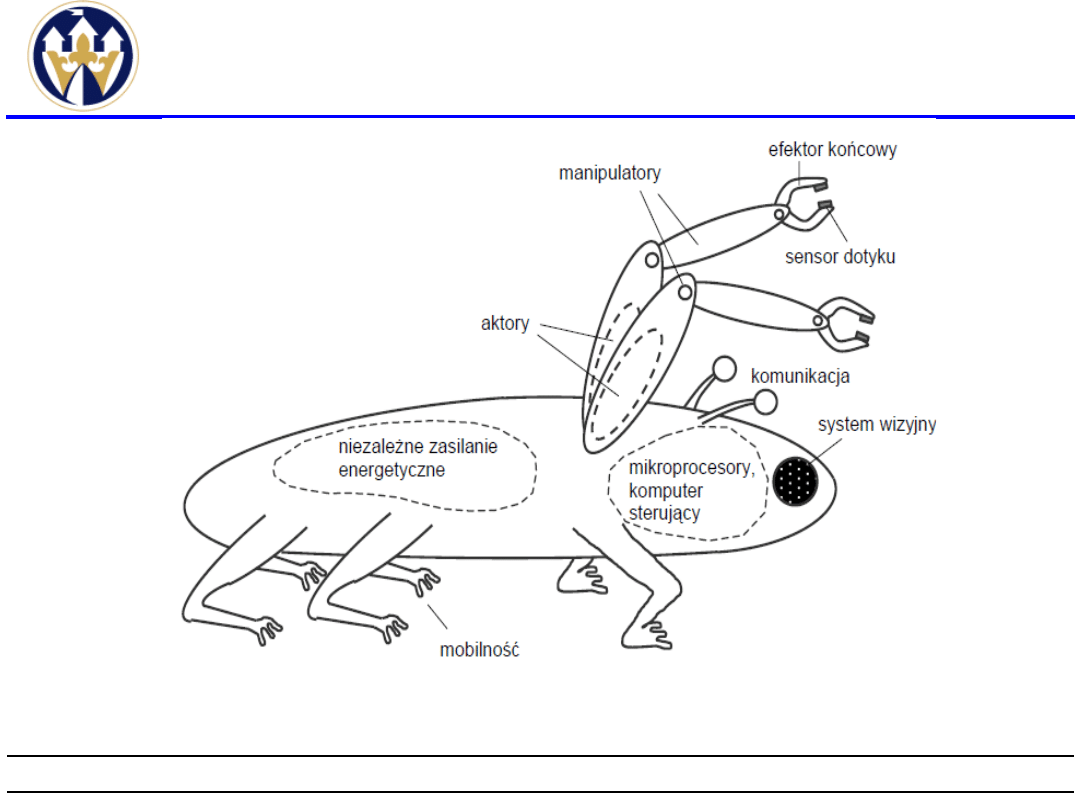
maszynowej. Diagram blokowy robota został
przedstawiony na rysunku poniżej.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
5
Konstrukcje robotów(2)
Robot składa się najczęściej z następujących układów:
• Aktora - służy jako muskuł systemu, wytwarza ruch za
pomocą energii elektrycznej, pneumatycznej lub
hydraulicznej.
• Komunikatora - jednostka przesyłająca informację i
otrzymująca instrukcje od oddalonego operatora.
• Efektora końcowego - urządzenie chwytające na
końcu
ramienia
manipulatora;
używane
do
dokonywania zamierzonego styku z obiektem lub do
wytwarzania finalnego efektu robota na jego otoczeniu.
• Manipulatora - mechanizm zawierający kilka
segmentów lub ramion.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
6
• Zasilacza energii - ogólnie urządzenia
magazynujące energię, takie jak akumulatory
dla jednostki mobilnej; także elektroniczne
urządzenie zasilające.
•
Sensorów
-
zwykle
jakiegoś
rodzaju
przetwornik, którego wejściami są zjawiska
fizykalne a wyjściami sygnały elektroniczne.
Konstrukcje robotów(3)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
7
Konstrukcje robotów(4)
Układy robota.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
8
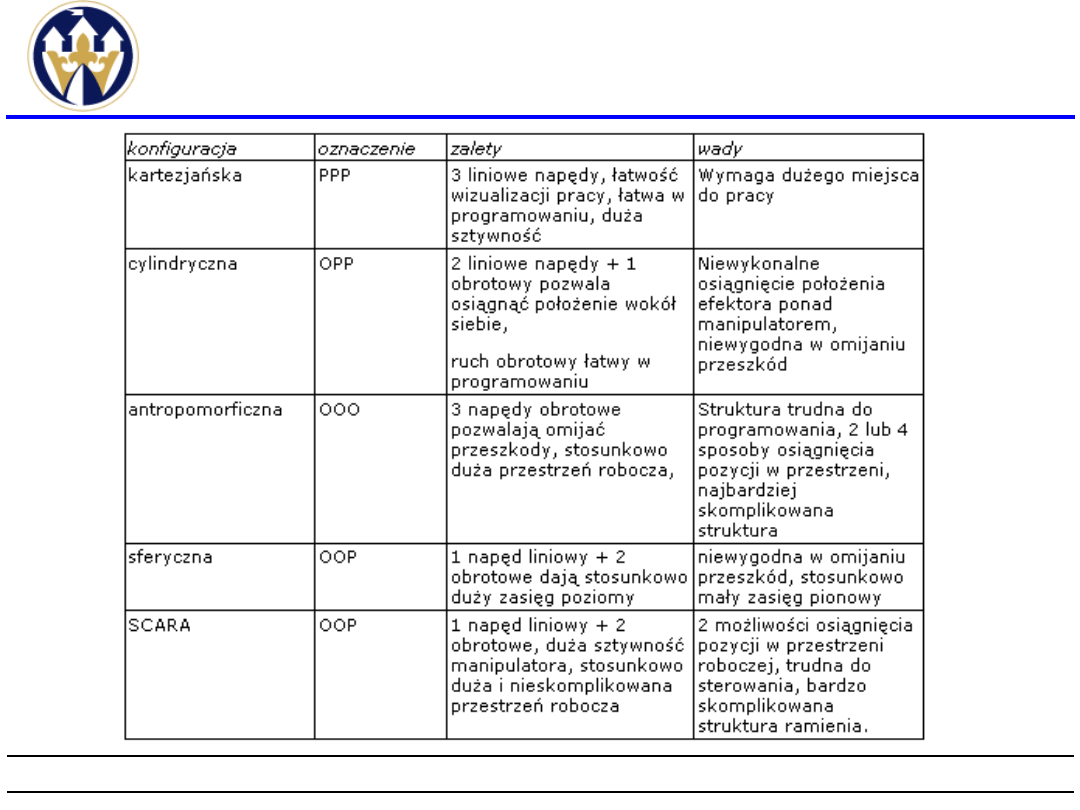
Konstrukcje robotów(5)
Konfiguracje
robotów
ze
względu
na
własności
geometryczne:
Robot kartezjański. Robot porusza się wzdłuż trzech
podstawowych osi posuwistych x
0
, y
0
i z
0
.
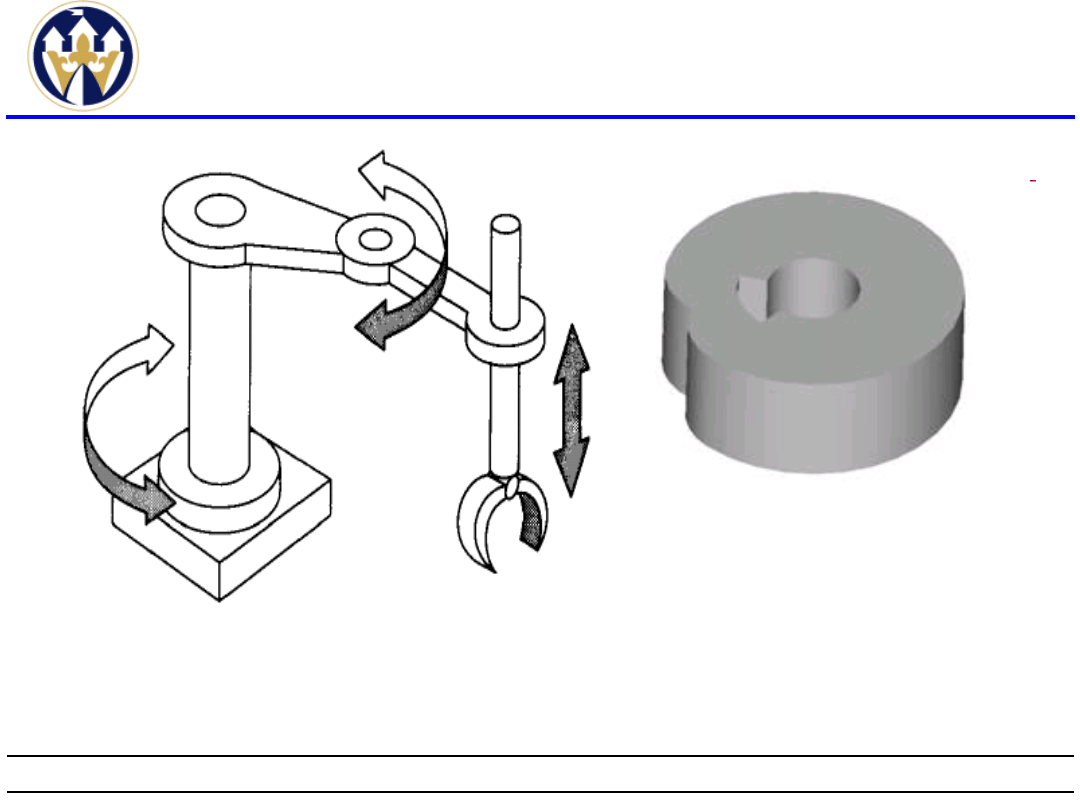
Robot cylindryczny. Możliwości ruchowe manipulatora są
określone przez współrzędne cylindryczne ( r,θ , z ).
Robot sferyczny. Możliwości ruchowe manipulatora określają
współrzędne sferyczne ( r,θ ,φ ).
Robot obrotowy. Manipulator antropomorficzny.
Robot SCARA. Możliwości ruchowe manipulatora sprowadzają
się do ruchów obrotowych ograniczonych do płaszczyzny
poziomej i do przesuwania jej.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
9
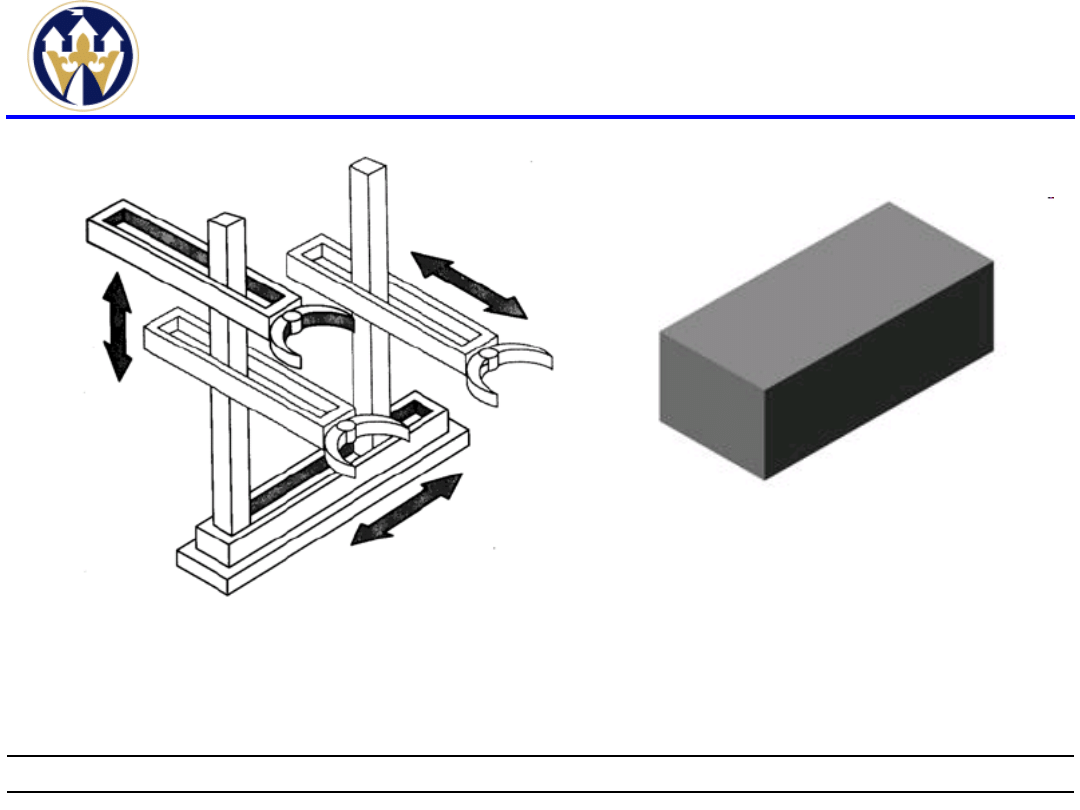
Konstrukcje robotów(6)
Konfiguracja kartezjańska (PPP) i jego główna
przestrzeń robocza.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
10
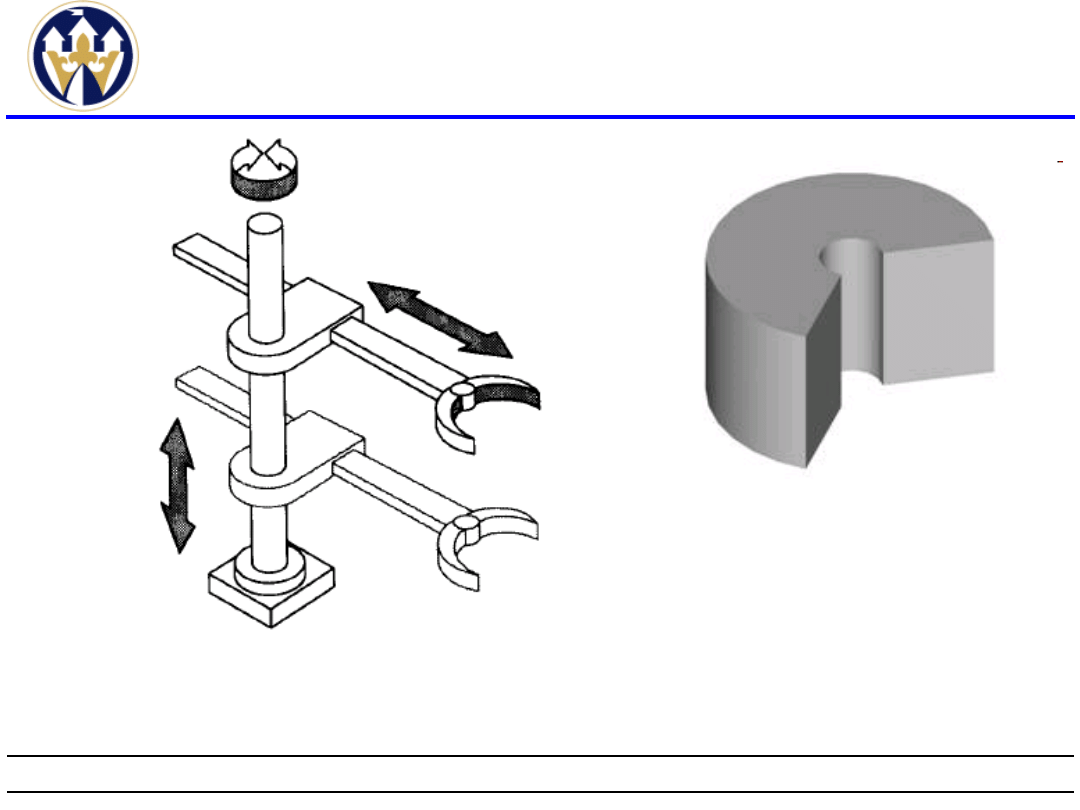
Konfiguracja cylindryczna (OPP) i jego główna
przestrzeń robocza.
Konstrukcje robotów(7)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
11
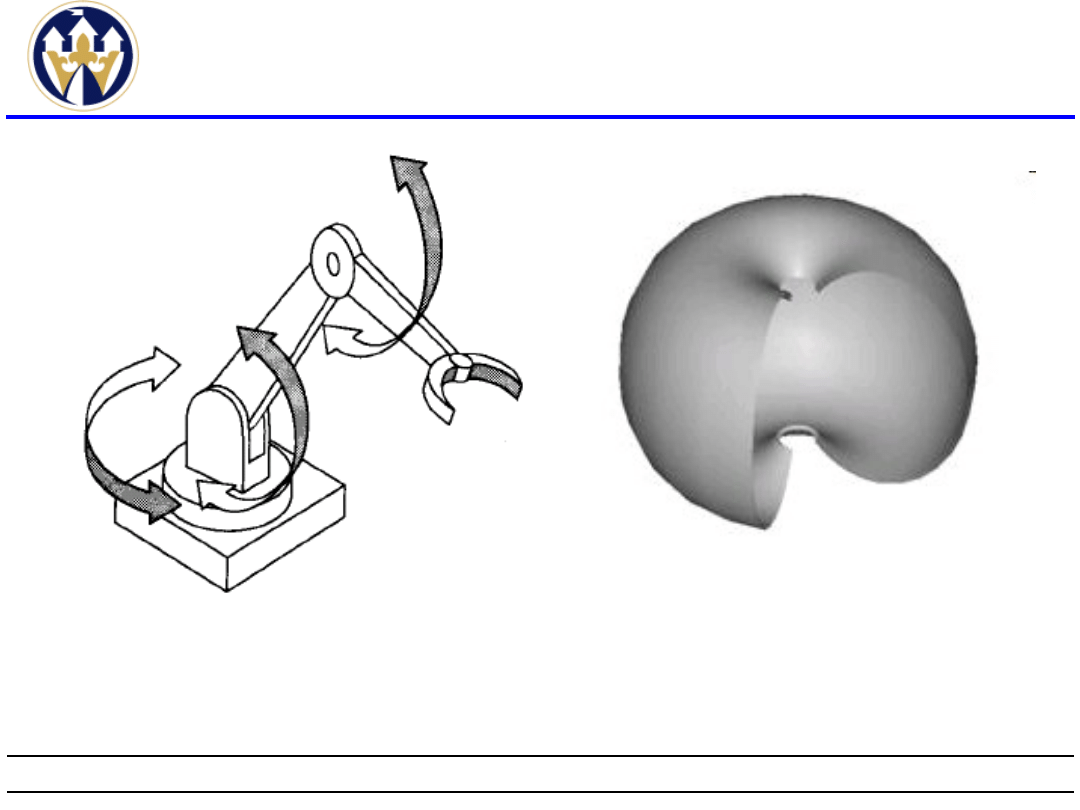
Konfiguracja antropomorficzna (OOO) i jego
główna przestrzeń robocza.
Konstrukcje robotów(8)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
12
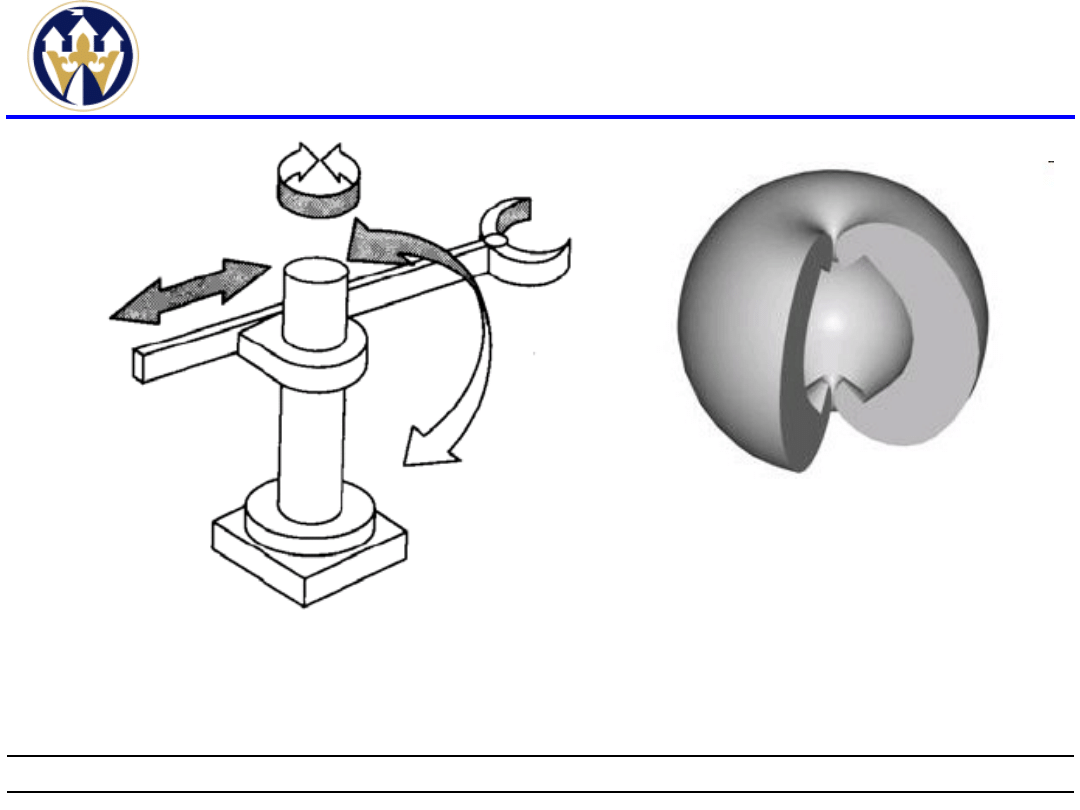
Konstrukcje robotów(9)
Konfiguracja sferyczna (OOP) i jego główna
przestrzeń robocza.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
13
Konstrukcje robotów(10)
Konfiguracja SCARA (OOP) i jego główna
przestrzeń robocza.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
14
Konstrukcje robotów(11)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
15
Chwytaki robotów(1)
Chwytak, zwany również efektorem uważa się za
jeden z najważniejszych elementów manipulatora.
Chwytak jest końcówką roboczą manipulatora.
Zadania chwytaka:
- uchwycenie manipulowanego przedmiotu z
zapewnieniem mu właściwej orientacji
- utrzymanie przedmiotu pomimo działających sił
zewnętrznych i przyspieszeń transportowych
- pozostawienie przedmiotu we właściwej orientacji
w miejscu przeznaczenia
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
16
Chwytaki robotów(2)
Podział chwytaków ze względu na budowę:
napędu
- mechaniczny
- pneumatyczny
- hydrauliczny
układu przeniesienia napędu
- nożycowy
- szczypcowy
- imadłowy
- opasujący
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
17
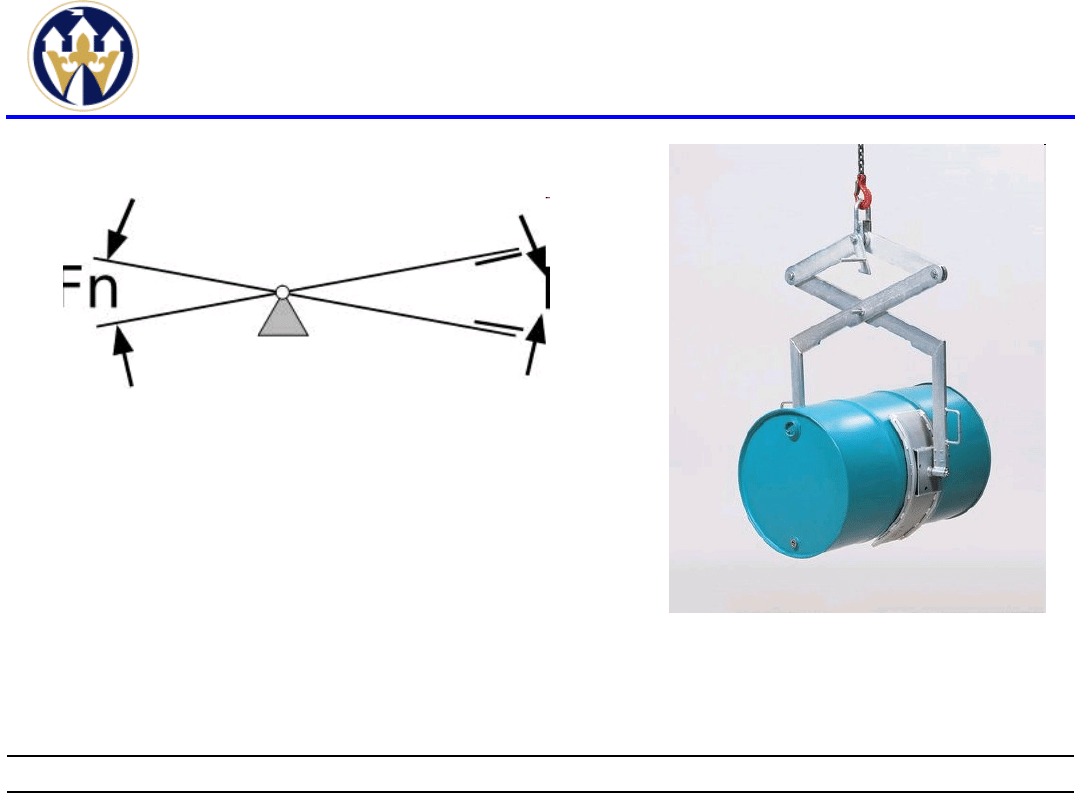
Chwytaki robotów(3)
Chwytak nożycowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
18
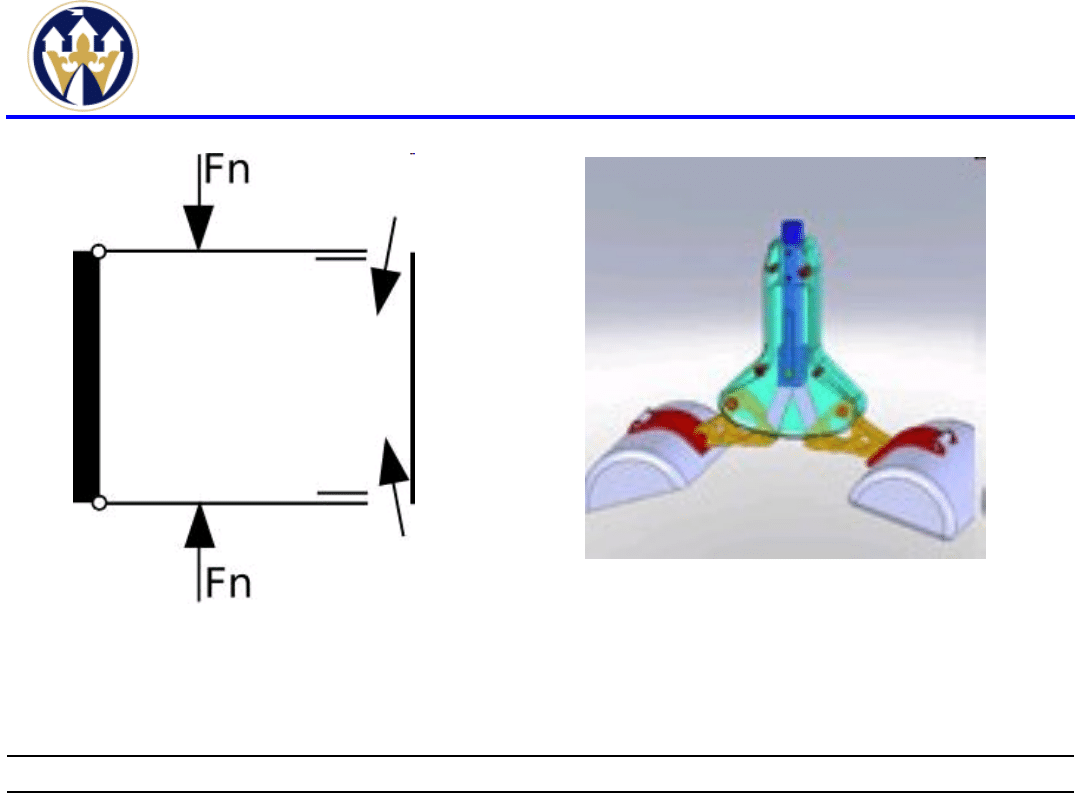
Chwytaki robotów(4)
Chwytak szczypcowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
19
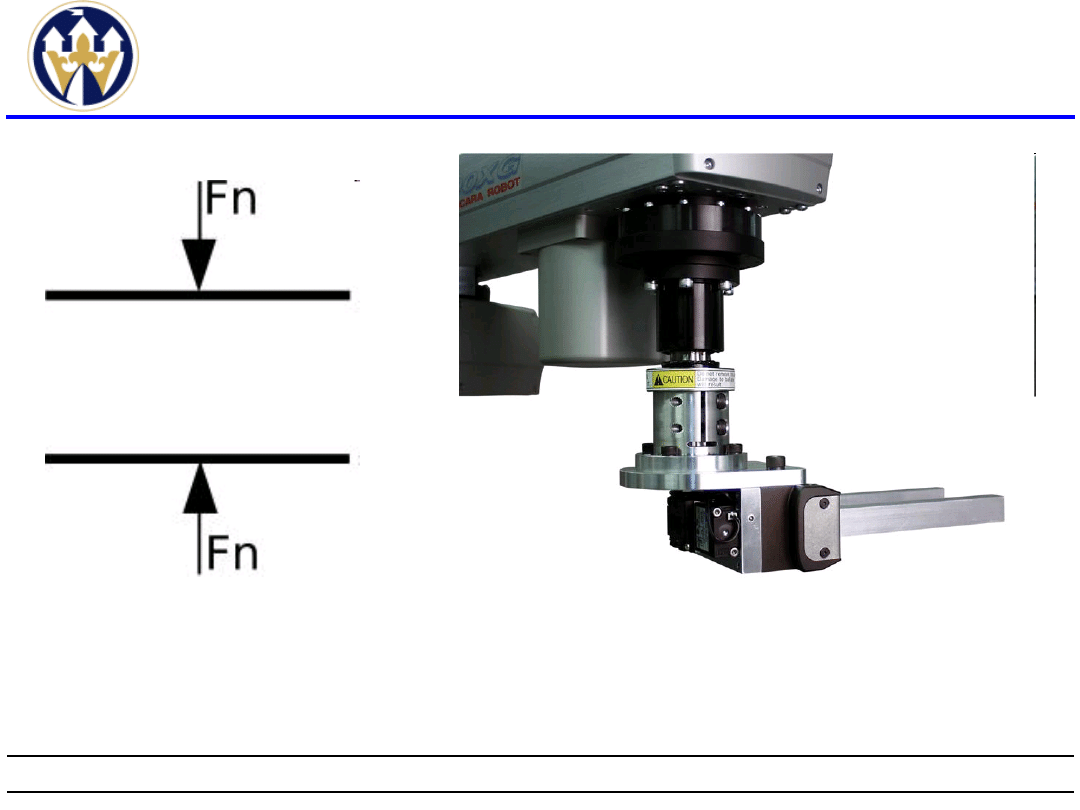
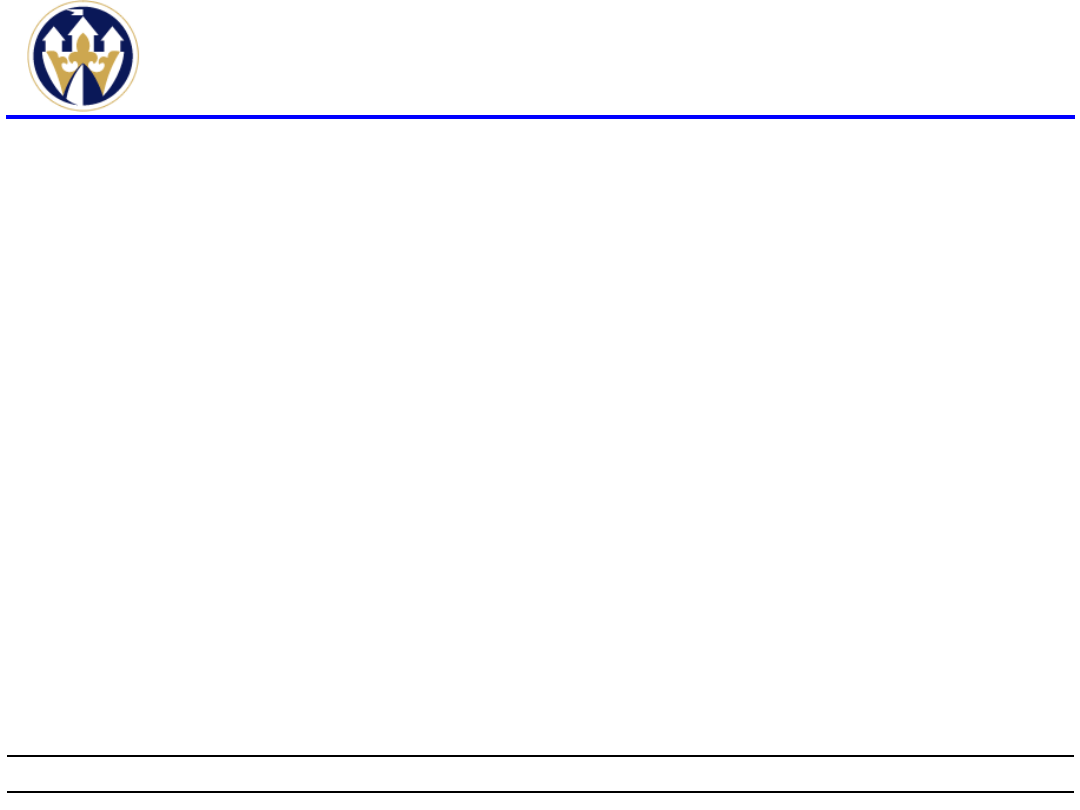
Chwytaki robotów(5)
Chwytak imadłowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
20
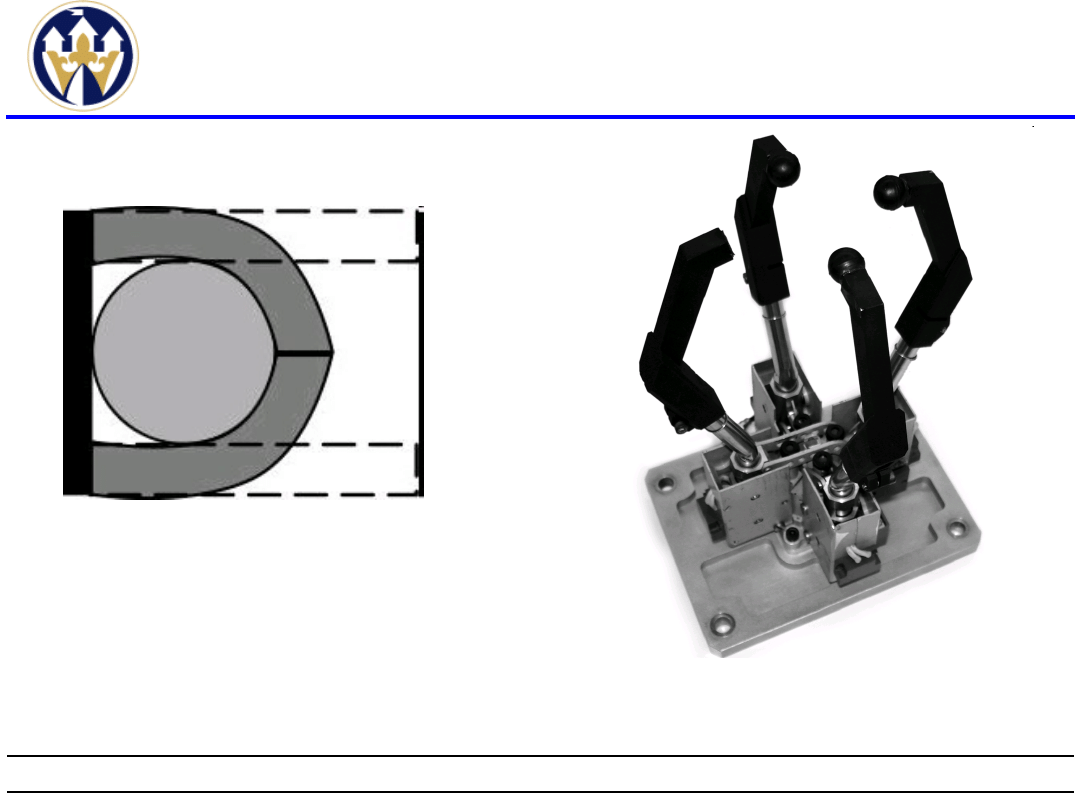
Chwytaki robotów(6)
Chwytak opasujący.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
21
Chwytaki robotów(7)
Chwytaki dzielimy również na:
- dwuszczękowe
- trójszczękowe
- wieloszczękowe
z końcówkami:
- sztywnymi
- sprężystymi
- elastycznymi
-
przyssawkowymi
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
22
Chwytak ze sztywnymi końcówkami.
Chwytaki robotów(8)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
23
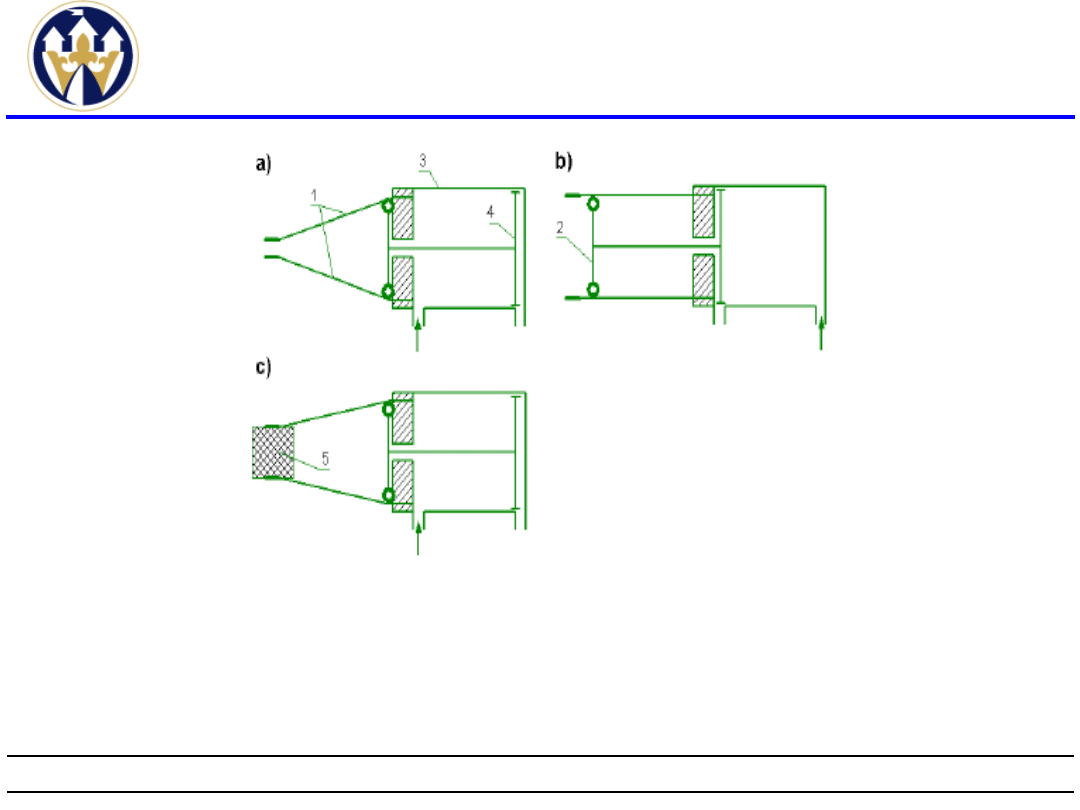
Chwytak ze sprężystymi końcówkami. a) stan
spoczynku, b) chwytak rozwarty, c) uchwycenie
obiektu, 1 – końcówki sprężyste, 2 – rozpora
końcówek, 3 – siłownik, 4 – tłok, 5 – obiekt
Chwytaki robotów(9)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
24
Chwytaki robotów(10)
Chwytak z elastycznymi końcówkami.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
25
Chwytaki robotów(11)
Chwytak z przyssawkowymi końcówkami.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
26
Chwytaki robotów(12)
Ze względu na sposób trzymania detalu
chwytaki dzielimy na:
- kształtowe
- siłowe
- siłowo-kształtowe
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
27
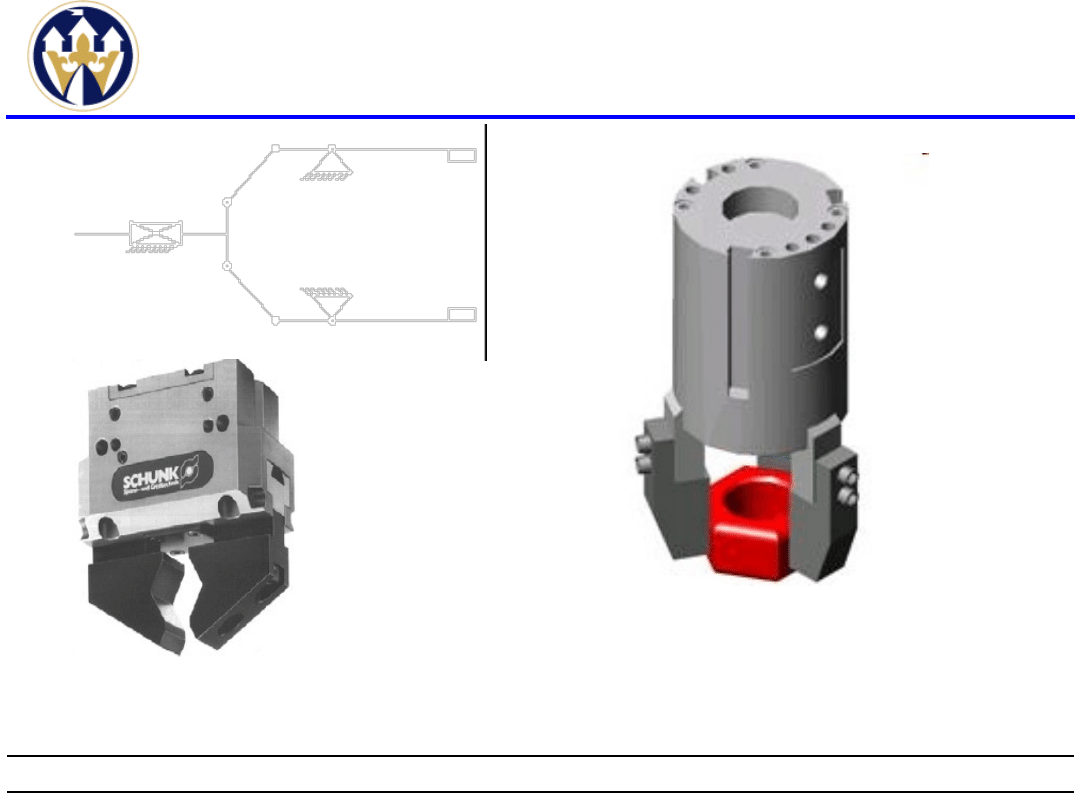
Chwytaki robotów(13)
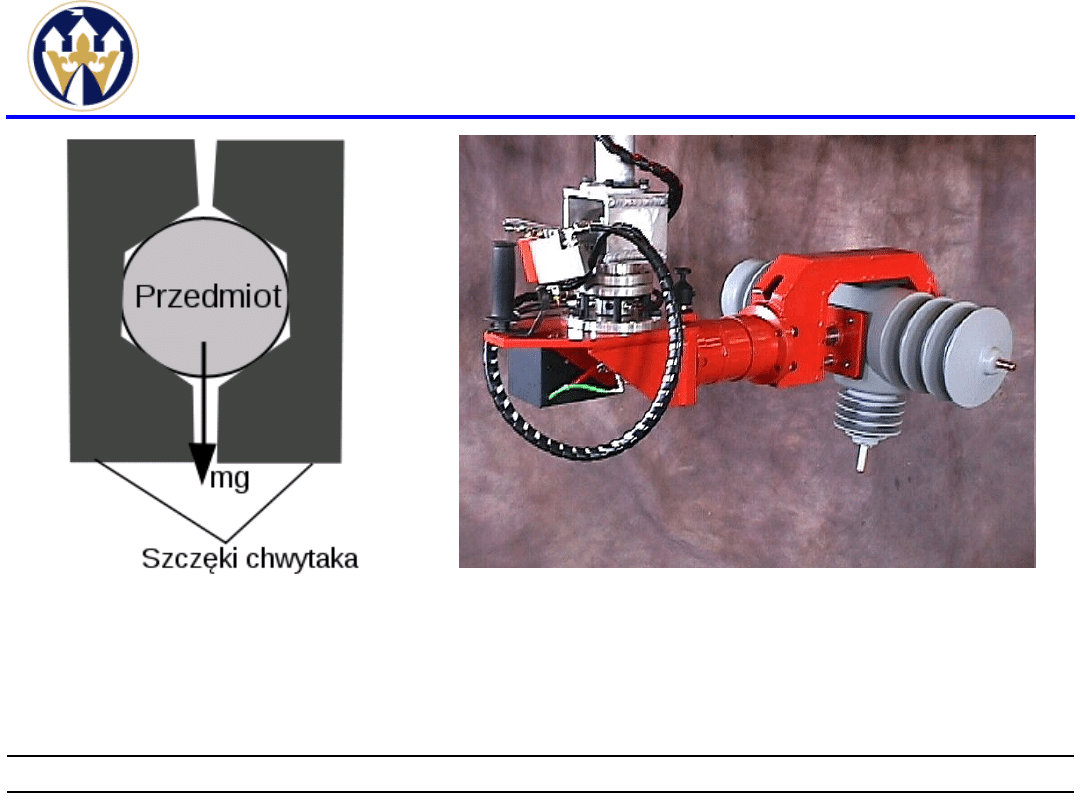
Chwytanie kształtowe polega na tym, że elementy
chwytne
swoim
kształtem
pozbawiają
obiekt
manipulacji swobody ruchu względem chwytaka.
Do wyprodukowania końcówek chwytnych o kształcie
odpowiadającym kształtowi powierzchni chwytanego
obiektu można posłużyć się różnymi metodami.
Można wykonać formę z wybranego fragmentu
obiektu manipulacji metodą odlewania, np. z
płynnego polimeru. Odlaną formę można użyć po jej
stwardnieniu jak nakładkę na końcówkę chwytną.
Inna metoda to skorzystanie z dostępnego modelu
CAD obiektu.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
28
Chwytaki robotów(14)
Chwytak kształtowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
29
Chwytaki robotów(15)
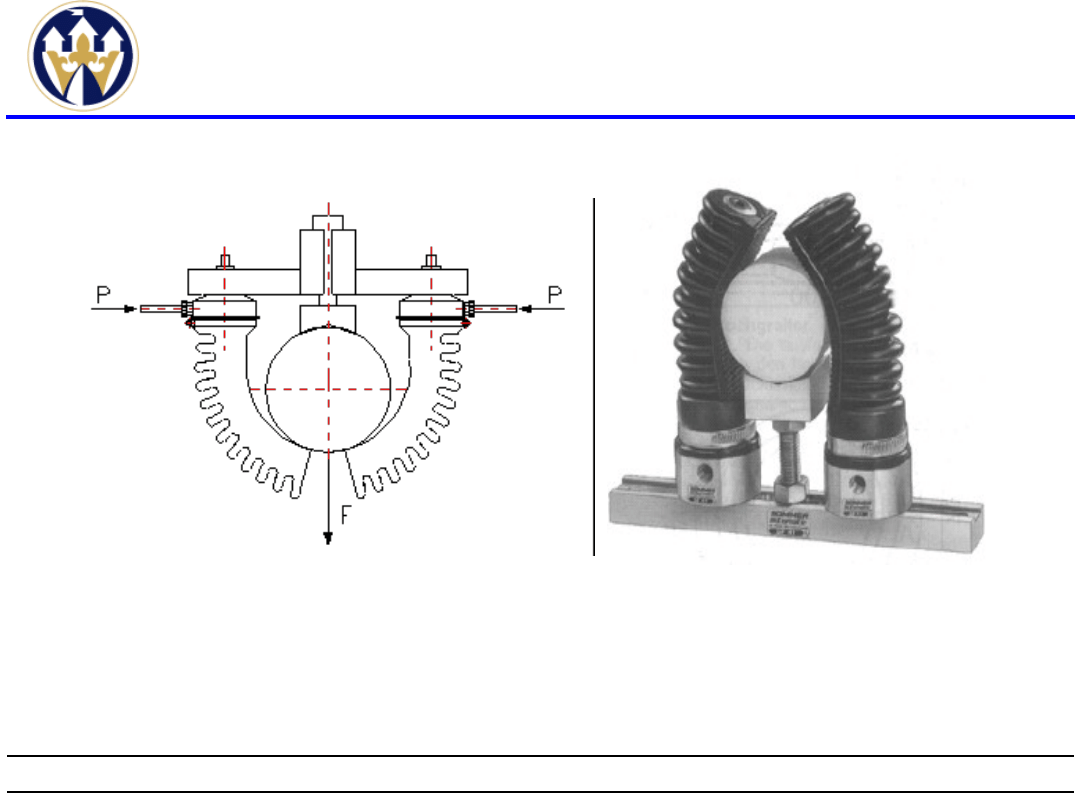
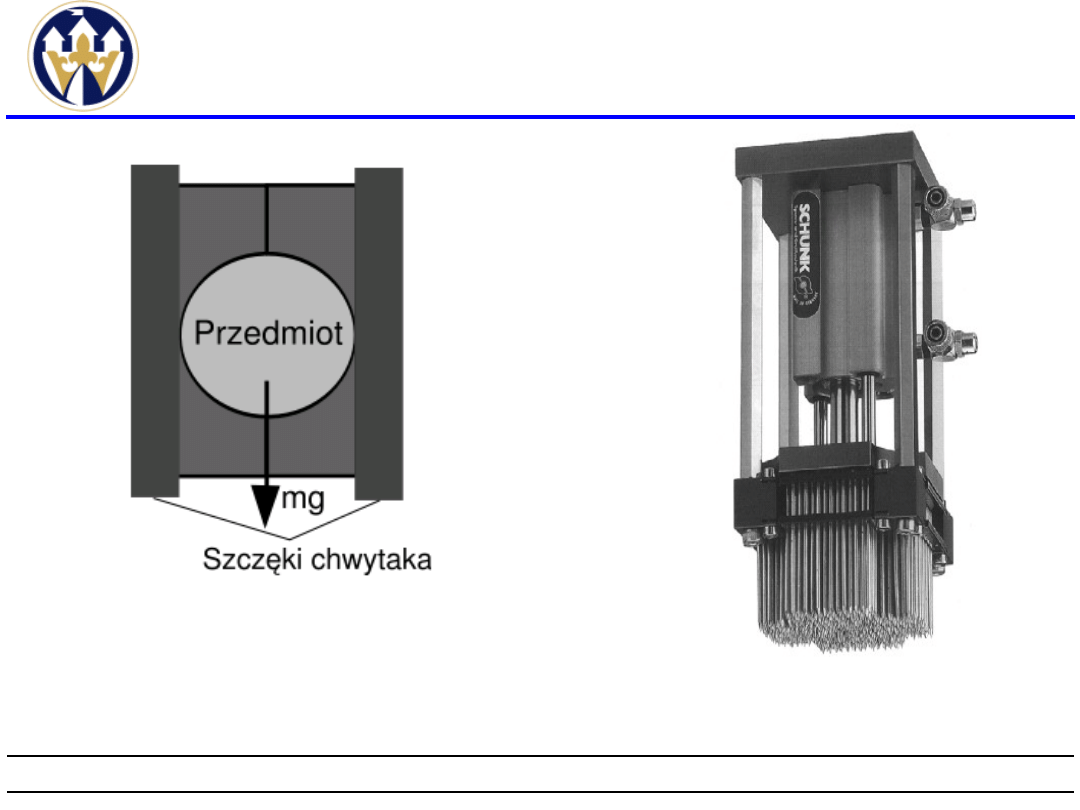
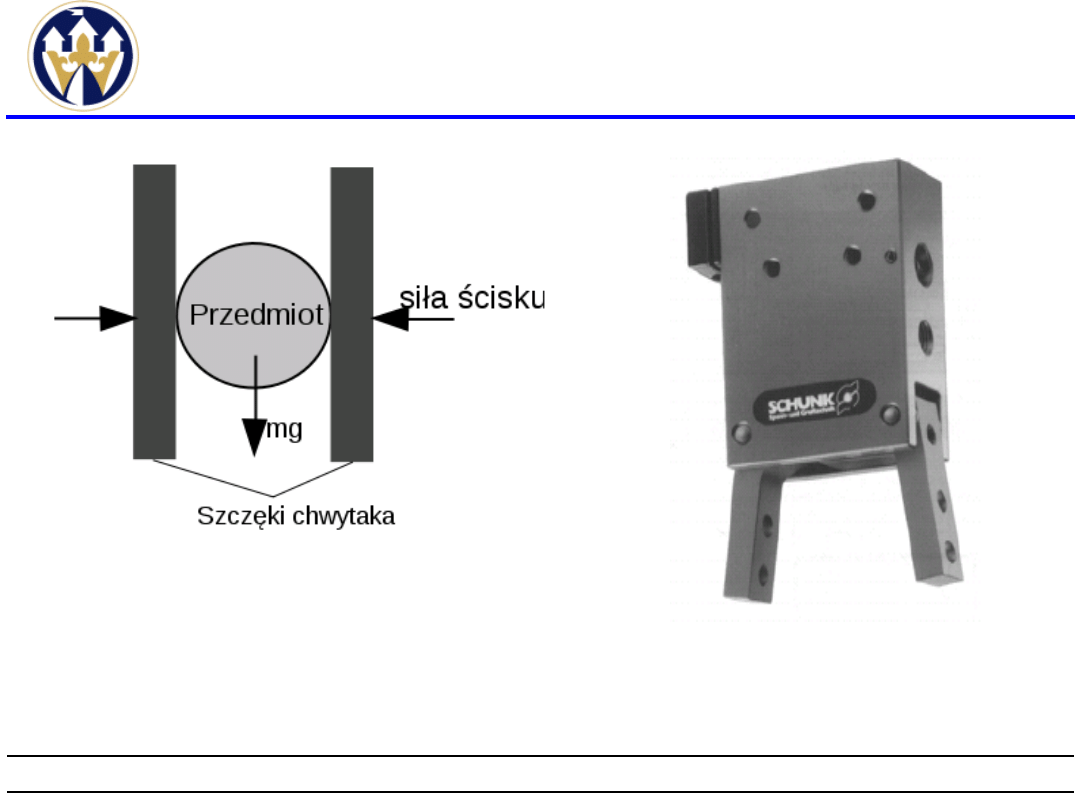
Chwytaki siłowe podczas chwytania działają
na obiekt manipulacji siłami w stronę
powierzchni obiektu albo przeciwnie - od
obiektu w kierunku chwytania. W pierwszym
przypadku, charakterystycznym dla chwytania
dwiema przeciwległymi końcówkami, na obiekt
działają dwie równe, co do wartości, przeciwnie
skierowane siły. Na powierzchni obiektu
powstają
naprężenia,
a
w
czasie
manipulowania obiektem pojawia się siła tarcia
statycznego,
przeciwdziałająca
przemieszczaniu
się
obiektu
względem
chwytaka.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
30
Chwytaki robotów(16)
Chwytak siłowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
31
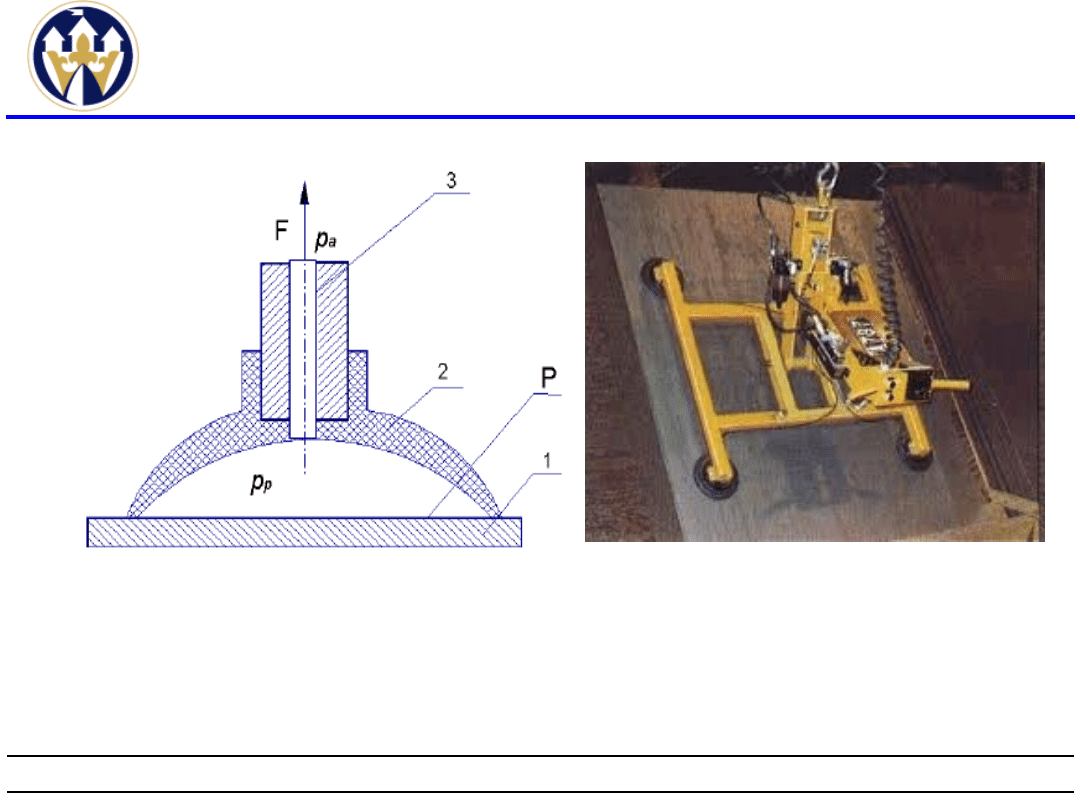
Chwytaki robotów(17)
Chwytak siłowo-kształtowy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
32
Sensoryka robotów(1)
Sensor (czujnik) to urządzenie dostarczające
informacji o pojawieniu się określonego bodźca,
przekroczeniu pewnej wartości progowej lub o
wartości rejestrowanej wielkości fizycznej. W tym
ujęciu układ czujnika składa się z: czujnika,
przetwornika oraz często układu telemetrycznego
Najczęściej spotykanymi czujnikami są czujniki
dostarczające informację w jednej z wielkości
elektrycznych, takich jak: napięcie, natężenie
prądu, opór elektryczny. Przyczyną tego jest fakt,
że prąd elektryczny to sygnał, który łatwo
wzmocnić, przesłać na duże odległości, poddać
dalszemu przetwarzaniu przy użyciu technik
cyfrowych i komputerów, a także zachować.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
33
Sensoryka robotów(2)
Sensoryka robota może służyć do:
- podwyższenia bezpieczeństwa
- zapewnienia wymaganej jakości
- zwiększenia wydajności
-
kompensowania
niedokładności
pozycjonowania
- zwiększenia elastyczności sterowania
- uproszczenia programowania
- zastępowania ręcznych korekcji programu
- częściowego zastępowania programowania
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
34
Sensoryka robotów(3)
Dwa typy sensorów muszą być użyte w
każdym rodzaju układu robotyki:
-
proprioreceptory
służące
do
pomiaru
wewnętrznych parametrów robota (głównie
położeniowych).
-
eksteroceptory
służące
do
pomiaru
parametrów środowiskowych (zewnętrznych z
punktu widzenia robota)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
35
Sensoryka robotów(4)
Czujniki uzywane w robotach
• Czujniki rezystancyjne:
potencjometry,
fotokomórki
rezystancyjne,
czujniki
naprężeń, itd.
• Czujniki dotykowe:
przełączniki stykowe
• Czujniki na podczerwień:
pasywne (wykrywające źródło światła podczerwonego),
aktywne (pomiar swiatla odbitego),
czujniki odległości, itd.
• Czujniki wizyjne
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
36
Sensoryka robotów(5)
• Ultradźwiękowe
czujniki odległości
• Czujniki obrotów
• Czujniki inercyjne (do pomiaru drugiej pochodnej
położenia czyli przyspieszenia)
Akcelerometry, żyroskopy
• Czujniki orientacji
Kompas, inklinometr (pomiar kata wychylenia od
pionu wyznaczonego przez siłę grawitacji ziemskiej)
• Laserowe czujniki odległości
• Systemy pozycyjne jak GPS,
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
37
Sensoryka robotów(6)
Przykłady zastosowania czujnika dotykowego:
• do wykrywania, ze robot zetknal sie z innym
obiektem np. ściana, przeszkoda
• do wykrywania zetknięcia się wewnętrznych
ruchomych części robota, np. ramie robota, chwytak
• czujnik podłoża - do wykrywania kontaktu robota z
podłożem aby robot nie wykroczył poza stół
• przełącznik wejściowy - klawisz, sterowanie
zewnętrzne
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
38
Kinematyka robotów(1)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
39
Kinematyka robotów(2)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
40
W kinematyce prostej określa się pozycję i
orientację końcówki roboczej w zależności od
zmiennych
konfiguracyjnych
względem
globalnego układu współrzędnych. Natomiast
kinematyka odwrotna polega na znalezieniu
wszystkich
zbiorów
zmiennych
konfiguracyjnych w zależności od pozycji i
orientacji końcówki roboczej. W ogólnym
przypadku jest ono trudniejsze niż zadanie
kinematyki prostej ponieważ czasami nie
istnieje jednoznaczne rozwiązanie wynikające z
nieliniowości równań kinematyki.
Kinematyka robotów(3)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
41
Dynamika robotów(1)
W dynamice rozpatruje się równania ruchu, które
opisują ruch manipulatora związanego z siłami i
momentami napędowymi lub siłami zewnętrznymi
przyłożonymi do manipulatora.
W analizie dynamiki manipulatorów rozpatruje się
dwa zadania. W zadaniu prostym dynamiki dane są
punkty trajektorii ruchu, prędkości oraz przyspiesze-
nia, a wyznacza się wektory sił i momentów
napędowych t. Takie zadanie występuje przy
sterowaniu ruchem manipulatora. Zadanie odwrotne
dynamiki polega na wyznaczeniu ruchu manipulatora
będącego
pod
działaniem
sił
i
momentów
napędowych, tzn. dany jest wektor t, a należy
wyznaczyć położenie, prędkości i przyspieszenia.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
42
Dynamika robotów(2)
Dynamiczne właściwości manipulatora są
wyrażone jako zmiany położenia w czasie w
zależności od sił i momentów napędowych.
Zależności te mogą być opisane przez układ
równań różniczkowych ruchu. W tym celu
stosuje się różne formalizmy matematyczne
jednym z nich jest metoda Lagrange'a.
Otrzymane tą metodą równania opisują
właściwości dynamiczne układu w zależności
od
energii
kinetycznej
i
potencjalnej,
wyrażonych
w
funkcji
współrzędnych
konfiguracyjnych.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
43
•Thank you !
•Vielen Dank !
•Cпасибо !
•Dziękuje !
Document Outline
- Slide 2
- Plan wykładu
- Konstrukcje robotów(1)
- Konstrukcje robotów(2)
- Konstrukcje robotów(3)
- Konstrukcje robotów(4)
- Konstrukcje robotów(5)
- Konstrukcje robotów(6)
- Konstrukcje robotów(7)
- Konstrukcje robotów(8)
- Konstrukcje robotów(9)
- Konstrukcje robotów(10)
- Konstrukcje robotów(11)
- Chwytaki robotów(1)
- Chwytaki robotów(2)
- Chwytaki robotów(3)
- Chwytaki robotów(4)
- Chwytaki robotów(5)
- Chwytaki robotów(6)
- Chwytaki robotów(7)
- Chwytaki robotów(8)
- Chwytaki robotów(9)
- Chwytaki robotów(10)
- Chwytaki robotów(11)
- Chwytaki robotów(12)
- Chwytaki robotów(13)
- Chwytaki robotów(14)
- Chwytaki robotów(15)
- Chwytaki robotów(16)
- Chwytaki robotów(17)
- Sensoryka robotów(1)
- Sensoryka robotów(2)
- Sensoryka robotów(3)
- Sensoryka robotów(4)
- Sensoryka robotów(5)
- Sensoryka robotów(6)
- Kinematyka robotów(1)
- Kinematyka robotów(2)
- Kinematyka robotów(3)
- Dynamika robotów(1)
- Dynamika robotów(2)
- Slide 43
Wyszukiwarka
Podobne podstrony:
Mech pod aut 2
Mech pod aut 3
Mech pod aut 1
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Bitwa Pod Grunwaldem
p 43 ZASADY PROJEKTOWANIA I KSZTAŁTOWANIA FUNDAMENTÓW POD MASZYNY
Teor pod ped wczesnoszkolnej jak chwalić dziecko
aut prawa majatkowe wIV
OCENA ZAGROŻEŃ PRZY EKSPLOATACJI URZĄDZEŃ POD CIŚNIENIEM
wykład8 zaburzenia pod postacią somatyczną
POMIAR NATĘŻENIA PRZEPŁYWU W PRZEWODZIE POD CIŚNIENIEM I KORYCIE OTWARTYM
KOTŁY OKRĘTOWE ZALICZENIE II MECH
a a q odpowiedzialność za działania syna pod wladzą lub niewolnika
(1967) GDY WSZYSTKIE NARODY ZJEDNOCZĄ SIĘ POD POD KTRÓLESTWEM BOŻYMid 888
więcej podobnych podstron