UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
1
PODSTAWY AUTOMATYKI
PODSTAWY AUTOMATYKI
Prowadzący
Prowadzący
:
:
dr ing. Sebastian
dr ing. Sebastian
Kula
Kula
e-mail: wsk09@wp.pl
e-mail: wsk09@wp.pl
Uniwersytet Kazimierza Wielkiego w
Bydgoszczy
wykład III
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
2
zajęcia realizowane są w ramach
projektu pt. “Mechatronika
kierunkiem przyszłości –
dostosowanie oferty edukacyjnej
Uniwersytetu Kazimierza
Wielkiego do potrzeb rynku
pracy”, Działanie 4.1.1, Programu
Operacyjnego Kapitał Ludzki,
współfinansowanego ze środków
Europejskiego Funduszu
Społecznego”.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
3
Plan wykładu
• Badanie stabilności
- warunek stabilności układu
- kryterium stabilności Routha - Hurwitza
- kryterium stabilności Nyquista
- kryterium Michajłowa
- stabilność obiektów nieliniowych
• Projektowanie liniowych układów regulacji w
dziedzinie czasu i częstotliwości.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
4
Badanie stabilności(1)
Podstawową właściwością, jaką powinien spełniać
każdy system automatyki jest stabilność. Pojęcie
stabilności mówi, że gdy podamy na wejście
systemu dowolny sygnał ograniczony, wówczas na
jego wyjściu y(t) otrzymamy również sygnał
ograniczony (definicja według Laplace’a).
Każdy układ regulacji automatycznej musi być
stabilny jeżeli ma działać prawidłowo. Sprawdzenie
jego stabilności jest podstawowym kryterium oceny
jakości układu regulacji i musi być kontrolowane w
czasie doboru rodzaju i optymalnych nastaw
poszczególnych członów tego układu a w
szczególności – w czasie doboru nastaw regulatora.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
5
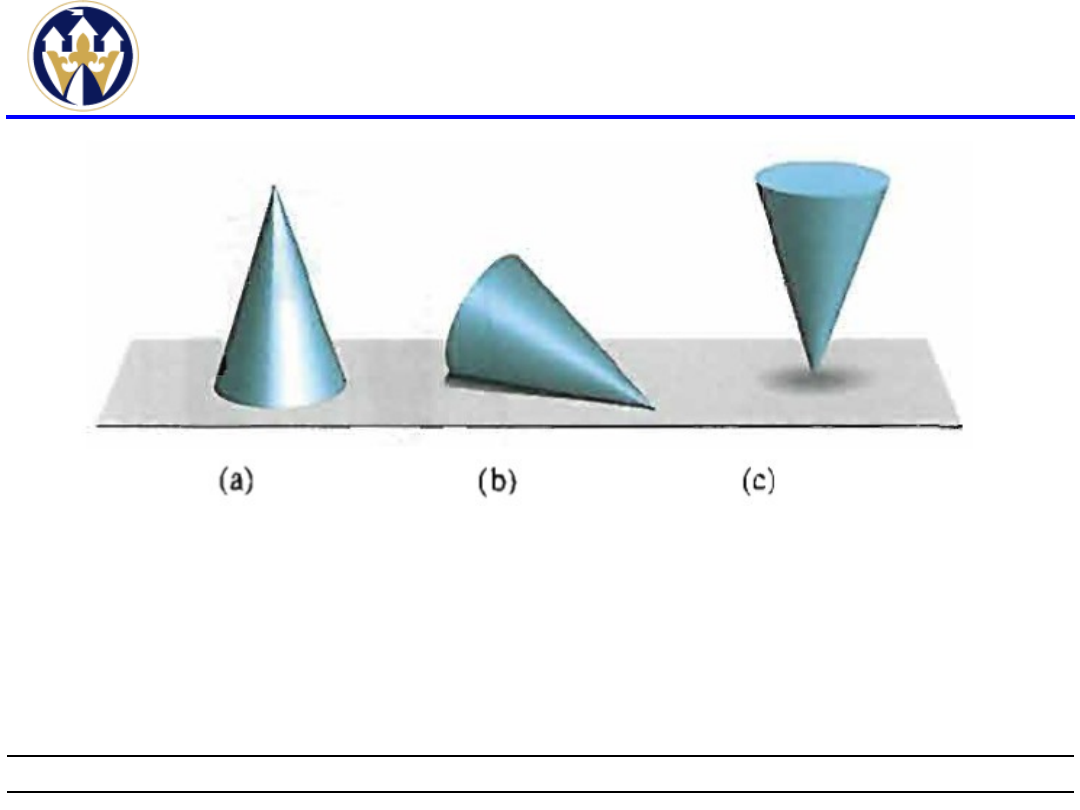
Koncepcja stabilności na przykładzie stożka a)
układ stabilny b) neutralny c) niestabilny.
Badanie stabilności(2)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
6
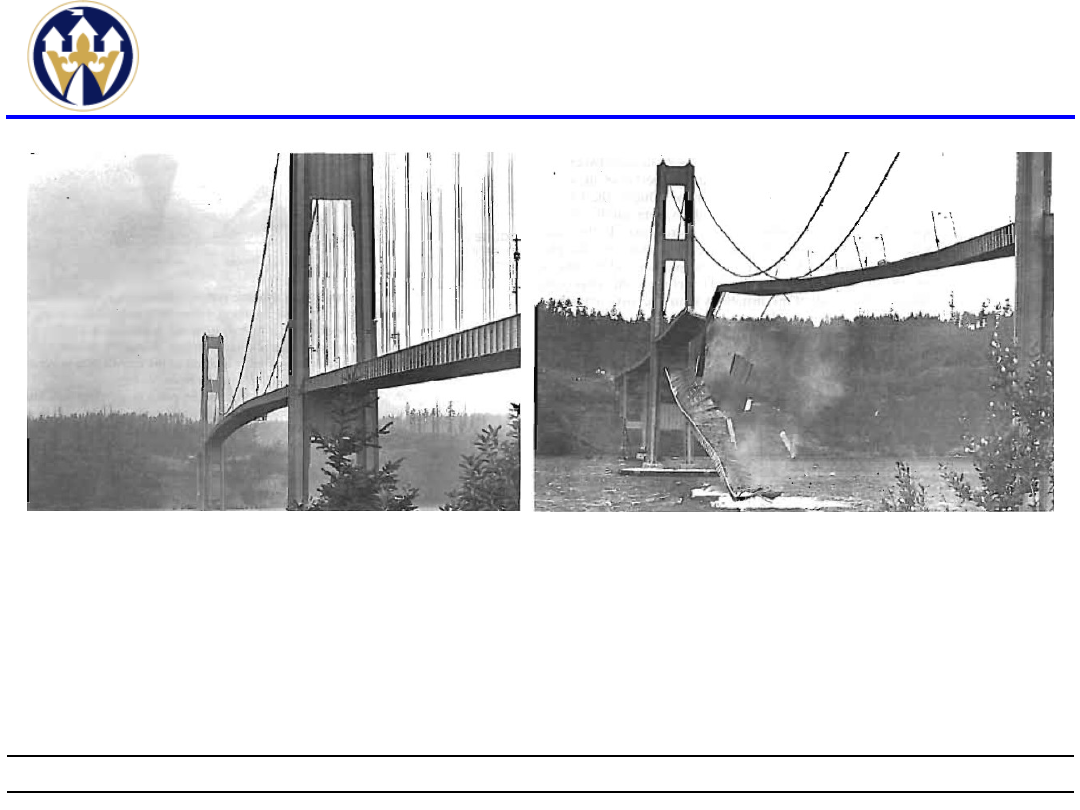
Badanie stabilności(3)
Most Tacoma Narrows w Puget Sound, USA.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
7
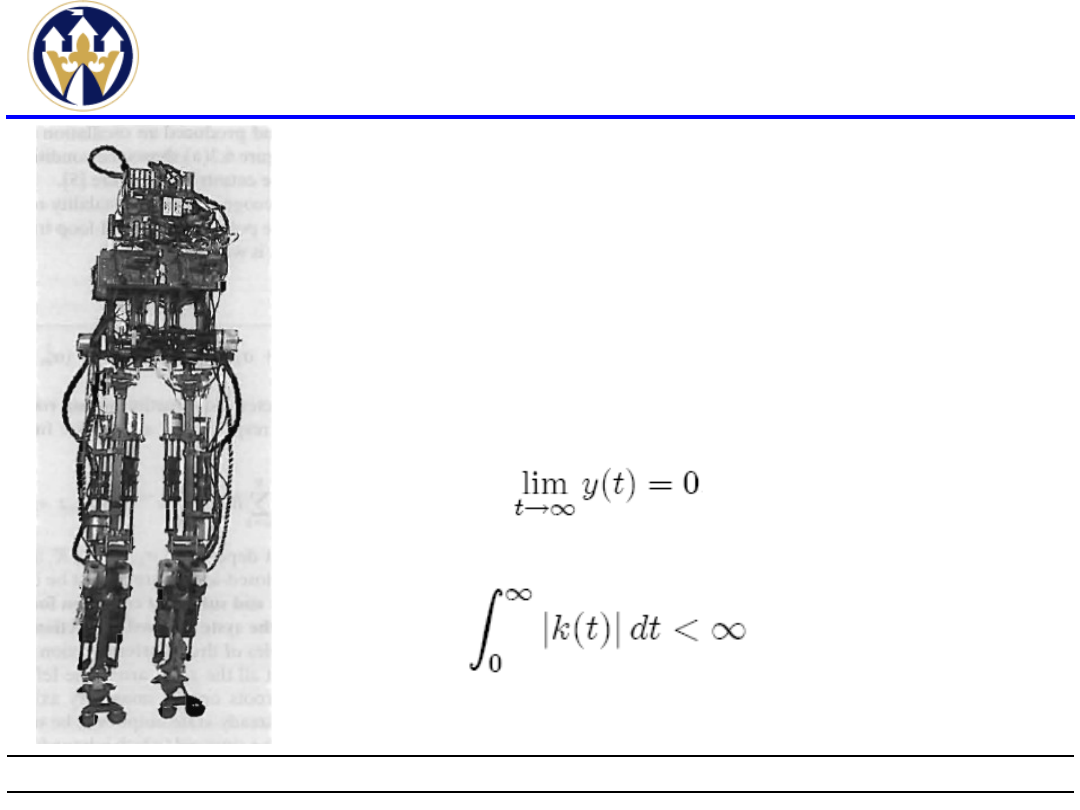
Badanie stabilności(4)
Robot M2 charakteryzujący się
małym zapasem stabilności.
Definicja stabilności mówi, że
system
nazywamy
stabilnym
(asymptotycznie),
jeśli
przy
dowolnym warunku początkowym i
zerowym pobudzeniu zachodzi:
Dla systemu stabilnego zachodzi
również:
k(t)- charakterystyka impulsowa
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
8
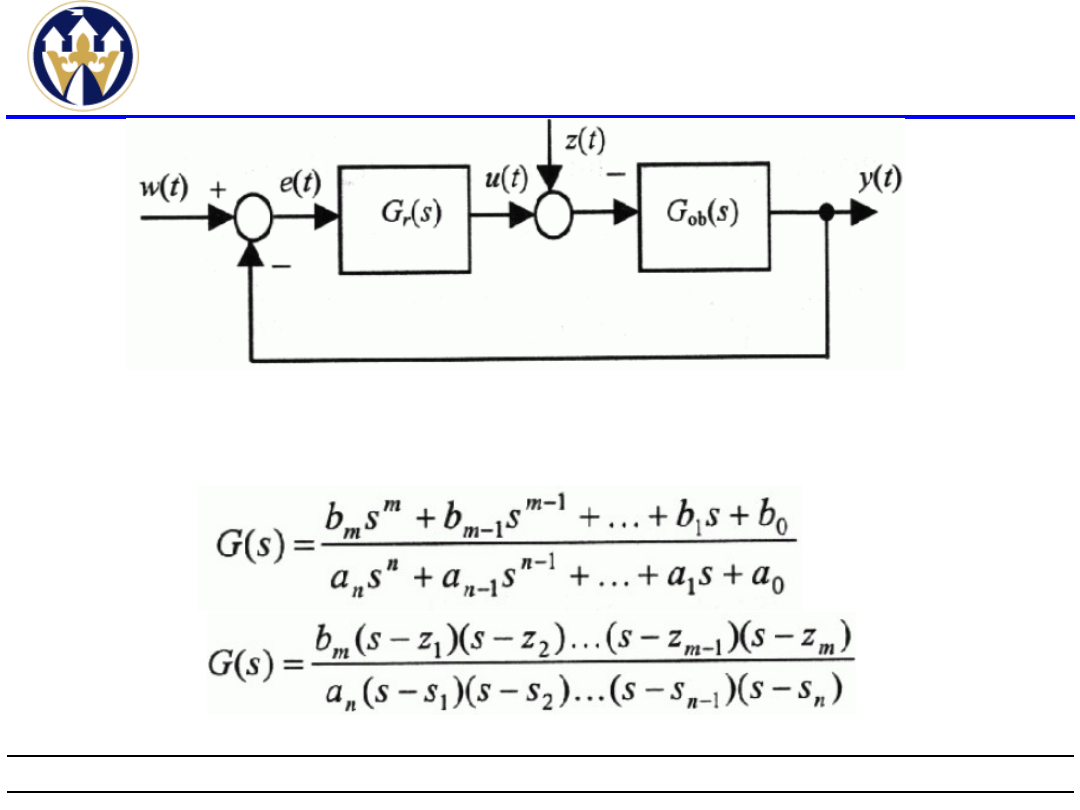
Schemat liniowego układu automatycznej
regulacji. G
r
(s), G
ob
(s) transmitancje regulatora
oraz obiektu.
Badanie stabilności(5)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
9
Badanie stabilności(6)
Odpowiedź impulsowa tego układu:
gdzie
s
i
są
pierwiastkami
(biegunami)
transmitancji
układu
zamkniętego
G(s)
powstałymi
po
rozwiązaniu
równiania
charakterystycznego:
Jeżeli wszystkie bieguny G(s) znajdują się w
lewej półpłaszczyźnie zmiennej zespolonej, czyli
mają części rzeczywiste ujemne to odpowiedź
impulsowa dąży do zera przy t dążącym do
nieskończoności. Wtedy układ jest układem
stabilnym.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
10
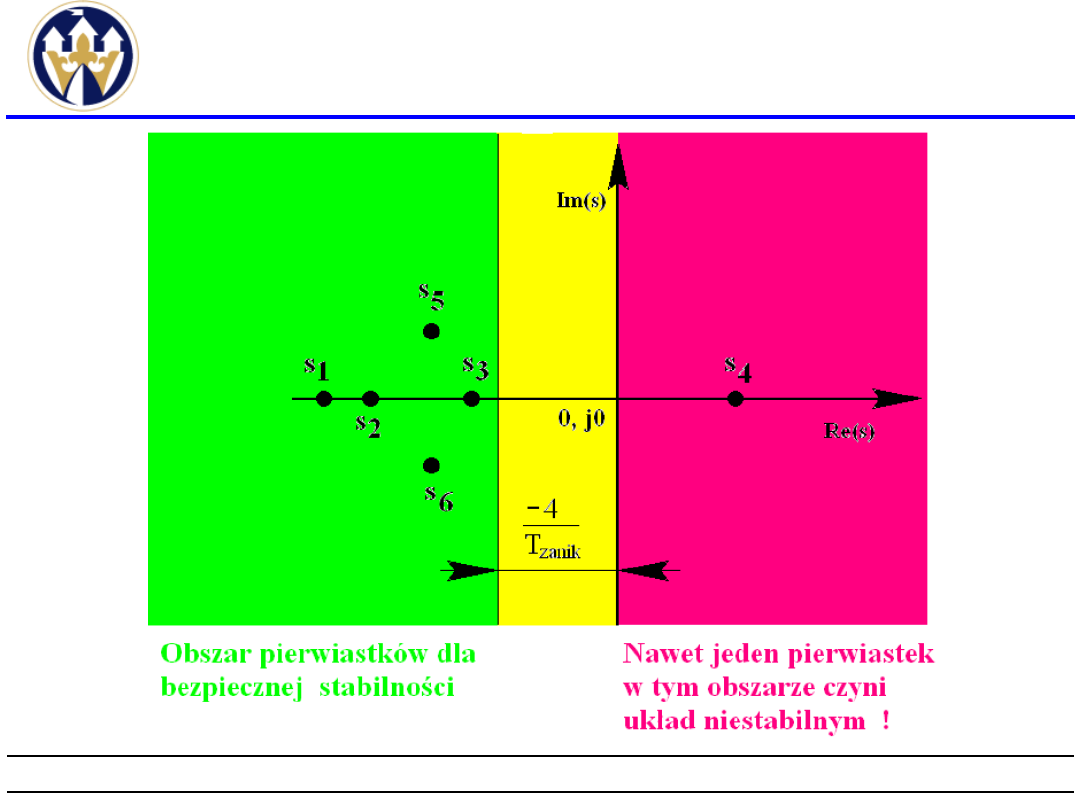
Badanie stabilności(7)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
11
Badanie stabilności(8)
Warunek powyżej sformułowany jest warunkiem
stabilności liniowego układu automatycznej
regulacji. Transmitancja operatorowa stabilnego
liniowego układu automatycznej regulacji nie
ma biegunów w prawej domkniętej płaszczyźnie
zmiennej zespolonej s.
Jeżeli chociaż jeden z biegunów transmitancji
układu zamkniętego znajduje się na osi urojonej
płaszczyzny zmiennej zespolonej s, to taki układ
zamknięty nie będzie układem stabilnym.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
12
Badanie stabilności(9)
Jeżeli jeden z biegunów transmitancji układu
zamkniętego G(s) jest biegunem zerowym, czyli
znajduje się w początku układu współrzędnych
na płaszczyźnie zmiennej zespolonej s, to
odpowiedź impulsowa g(t) dąży do wartości
stałej przy t dążącym do nieskończoności. Układ
zamknięty nie jest stabilny.
Jeżeli transmitancja układu zamkniętego ma
dwa bieguny urojone sprzężone: jω i -jω, czyli
znajdujące się na osi urojonej płaszczyzny
zmiennej zespolonej s, odpowiedź impulsowa
g(t) będzie przebiegiem sinusoidalnym i układ
zamknięty nie jest stabilny.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
13
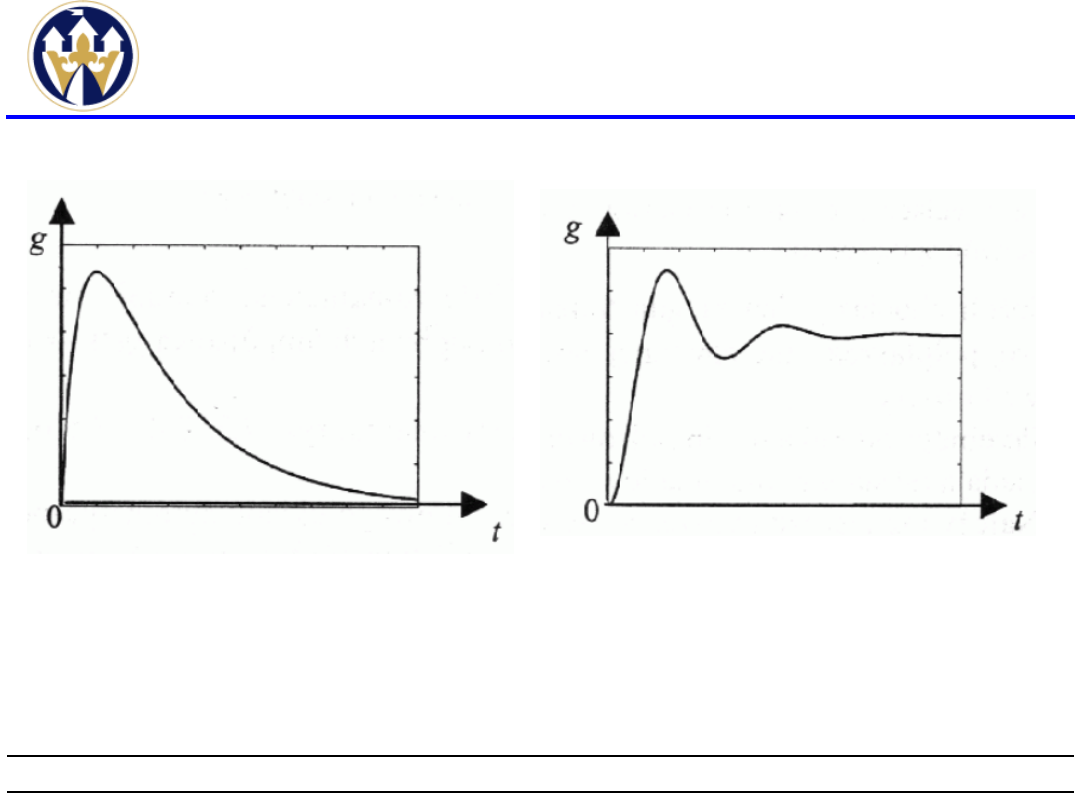
Badanie stabilności(10)
Odpowiedź impulsowa
stabilnego układu
regulacji.
Odpowiedź impulsowa
układu regulacji z
biegunem zerowym.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
14
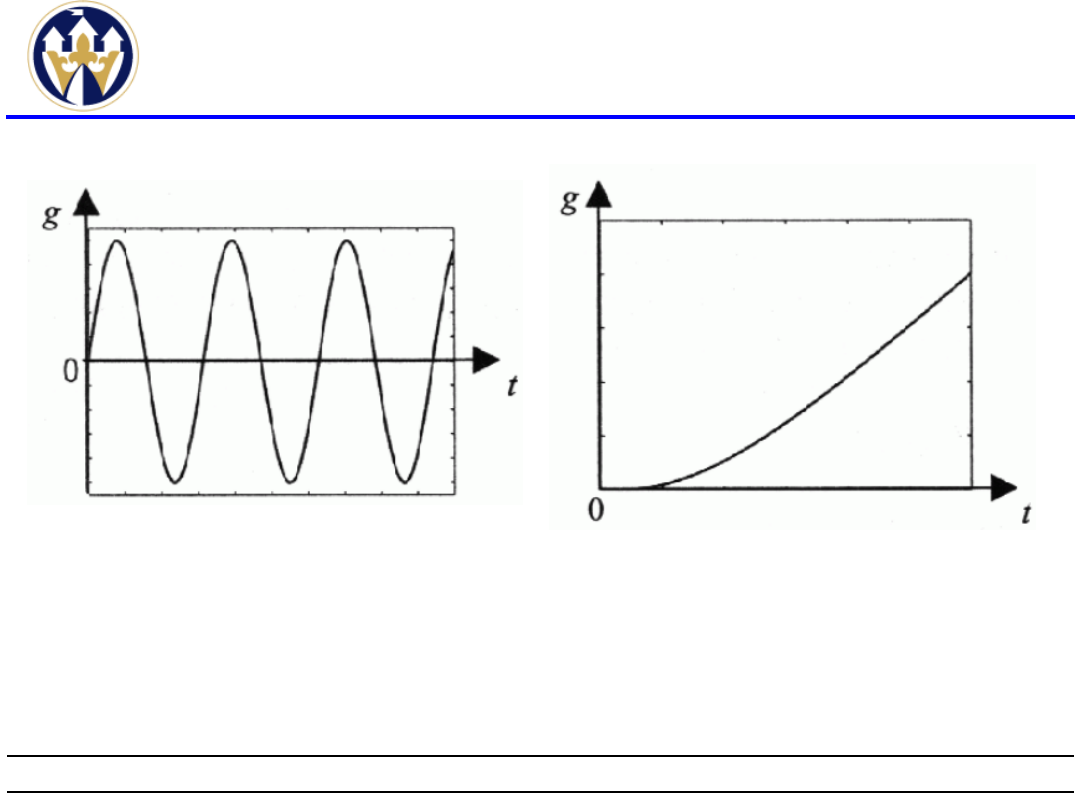
Badanie stabilności(11)
Odpowiedź impulsowa
układu regulacji z
dwoma biegunami
urojonymi
sprzężonymi.
Odpowiedź impulsowa
układu niestabilnego.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
15
Badanie stabilności(12)
Badania stabilności można przeprowadzać
metodami
analitycznymi
jeżeli
opis
matematyczny wszystkich członów układu
regulacji jest znany, stabilność można też
oceniać
eksperymentalnie
jeżeli
układ
regulacji istnieje i można na nim przeprowadzać
eksperymenty.
Badanie
stabilności
układu
regulacji
automatycznej
polega
na
wprowadzeniu
krótkotrwałego sygnału zakłócającego stan
równowagi układu i na ocenie przebiegu
sygnału wyjściowego lub uchybu regulacji po
zaniknięciu zakłócenia. Sygnałem zakłócającym
może być np. krótkotrwała (impulsowa) zmiana
sygnału wejściowego, którym jest wartość
zadana.

UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
16
Ocena stabilności układu opiera się na
sprawdzeniu
położenia
biegunów
jego
transmitancji.
Z
warunków
biegunowych
wiadomo, że wiąże się to z rozwiązaniem
równania charakterystycznego. Odpowiedź na
pytanie o stabilność układu automatycznej
regulacji można uzyskać bez rozwiązywania
układu
charakterystycznego,
poprzez
zastosowanie kryteriów stabilności (np.
kryterium
Routha-Hurwitza,
Hurwitza,
Michajłowa i Nyquista. Różnią się one między
sobą metodyką postępowania i bazują na różnej
formie wyjściowej wiedzy o układzie.
Kryterium Hurwizta(1)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
17
Kryterium Hurwizta(2)
Dysponując równaniem charakterystycznym
można sprawdzić stabilność układu bez
wyliczania jego pierwiastków. Skorzystać w tym
celu można z kryterium Hurwitza.
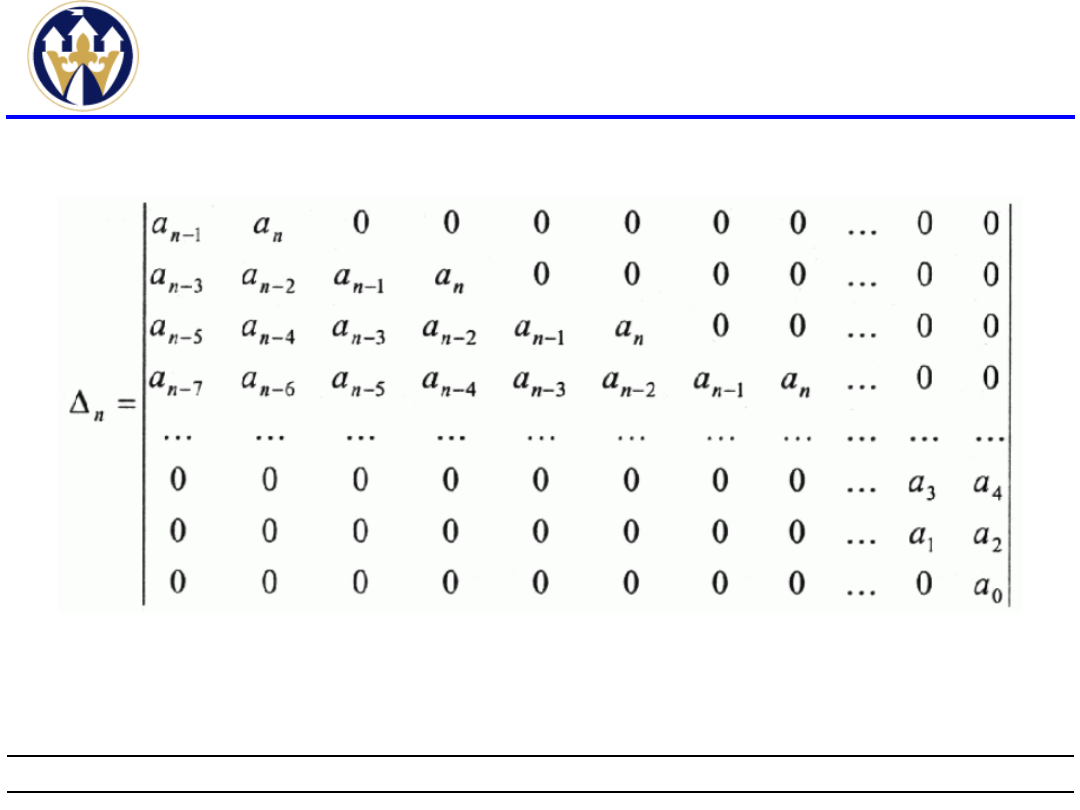
Według Hurwitza równanie algebraiczne
o współczynnikach rzeczywistych a
i
(i = 1, 2,...,
n) ma pierwiastki s
i
o ujemnych częściach
rzeczywistych wtedy i tylko wtedy, gdy
wszystkie współczynniki a
i
istnieją i są dodatnie
oraz gdy dodatni jest następujący wyznacznik n-
tego rzędu (zwany wyznacznikiem Hurwitza)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
18
Kryterium Hurwizta(3)
Wyznacznik Hurwiza.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
19
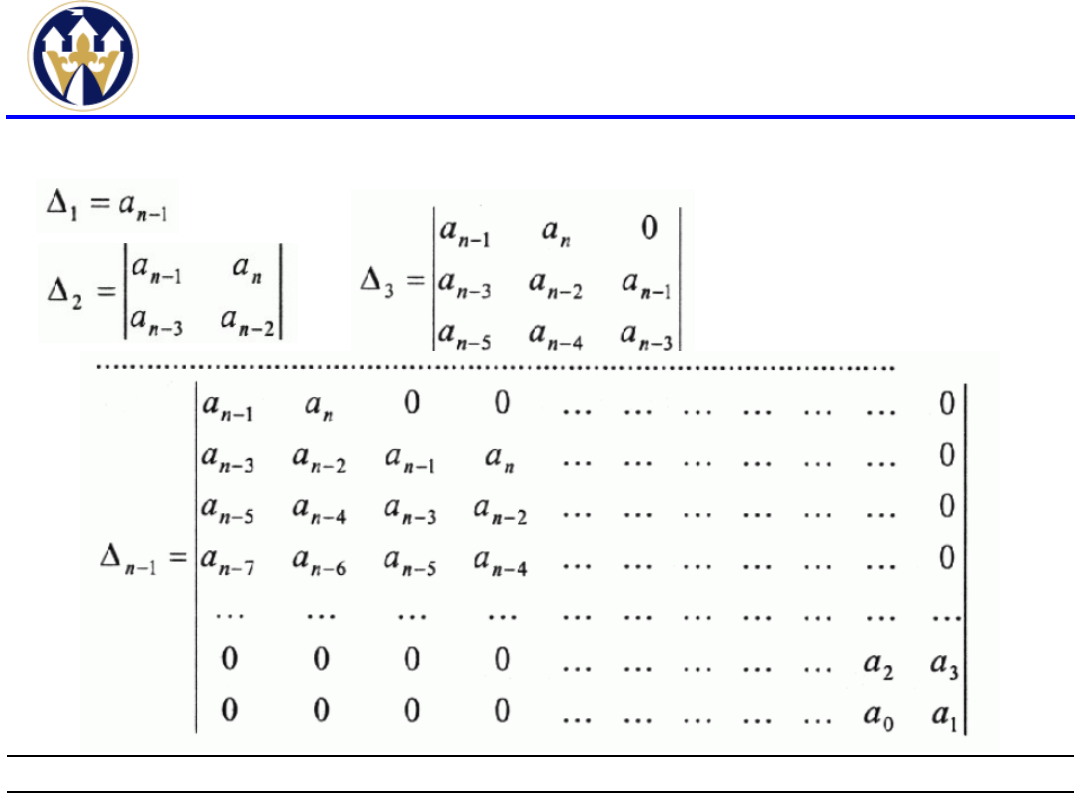
oraz wszystkie jego podwyznaczniki główne:
Kryterium Hurwizta(4)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
20
Kryterium Hurwizta(5)
Przykład
badania
stabilności
przy
wykorzystaniu
kryterium
Hurwitza.
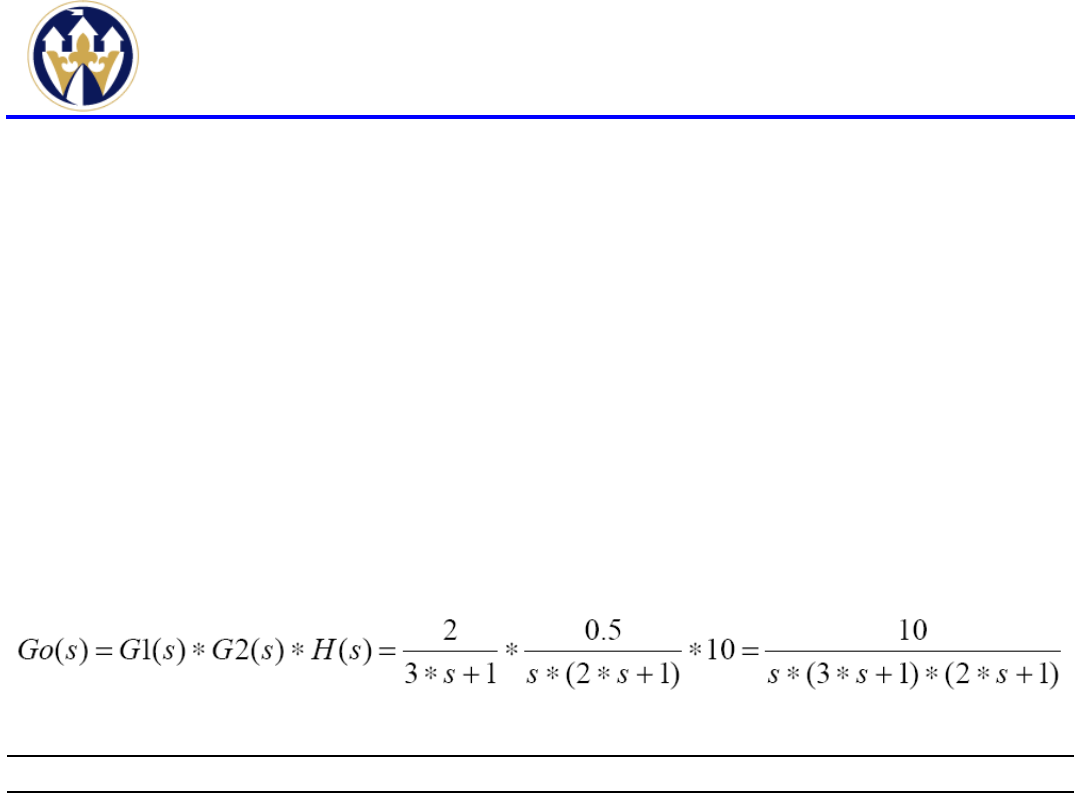
Układ
regulacji
automatycznej
z
ujemnym
sprzężeniem zwrotnym zawiera w torze
głównym człon nastawczy o transmitancji
operatorowej G1(s)=2/(3*s+1) i obiekt regulacji
o transmitancji G2(s)=0.5/(s*(2*s+1)) oraz w
torze
sprzężenia
zwrotnego
człon
proporcjonalny o transmitancji H(s)=10.
Transmitancja operatorowa układu otwartego:
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
21
Kryterium Hurwizta(6)
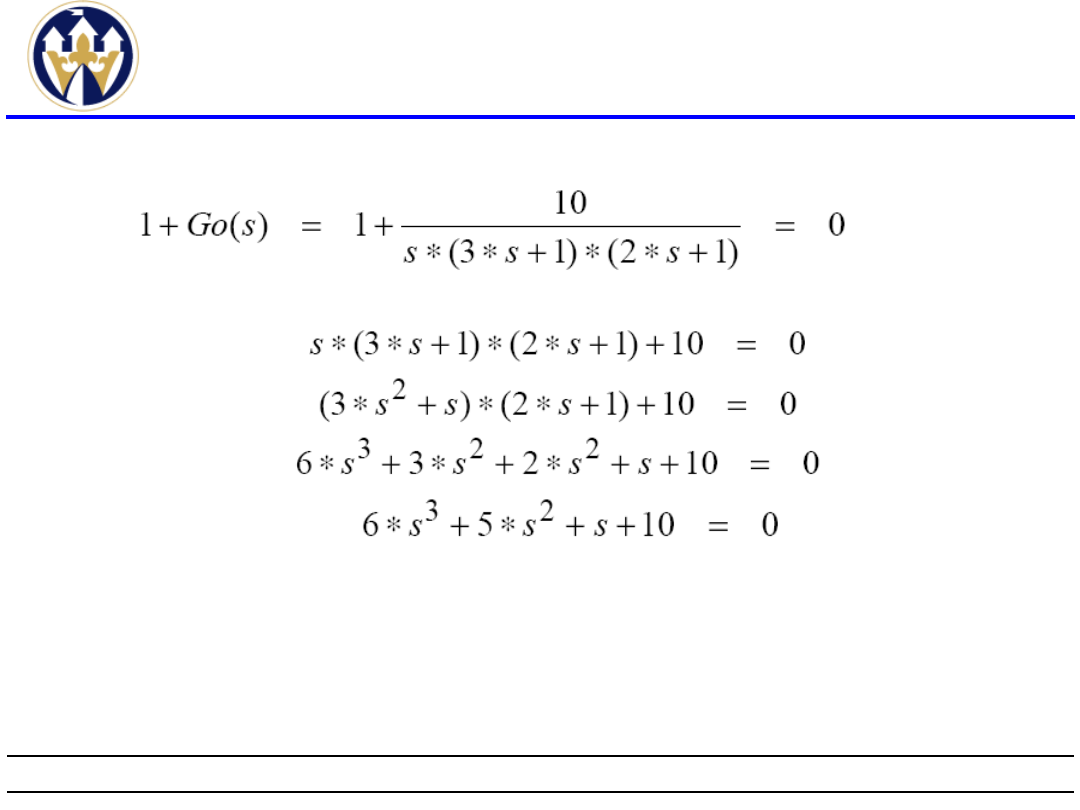
Równanie
charakterystyczne
układu
zamkniętego:
po kolejnych przekształceniach
ostateczna postać równania to wielomian 3
stopnia, w którym wszystkie stałe współczynniki
a
0
, a
1
, a
2
, a
3
, istnieją i są dodatnie a więc
spełniają pierwszy konieczny warunek kryterium
Hurwitza.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
22
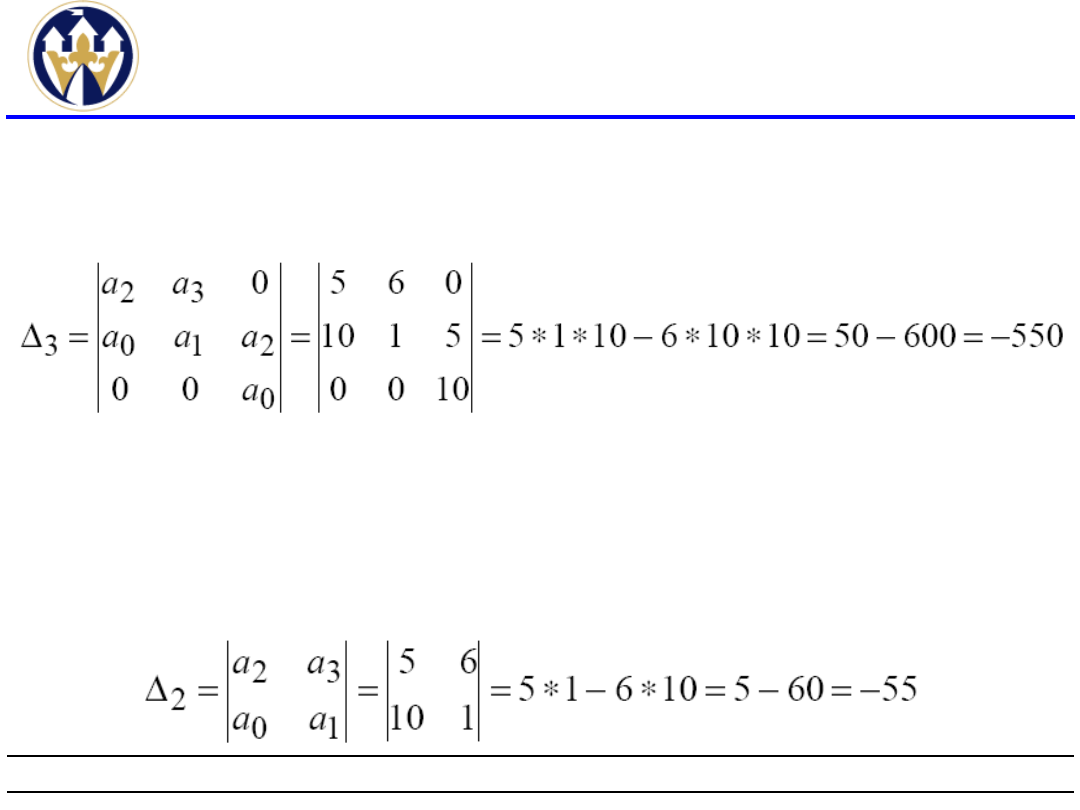
Kryterium Hurwizta(7)
Główny wyznacznik 3 - stopnia utworzony z tych
współczynników:
ma wartość ujemną, a więc układ jest
niestabilny i nie ma potrzeby przeprowadzania
dalszych obliczeń.
Można sprawdzić podwyznacznika 2 - stopnia
utworzonego, który także jest ujemny.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
23
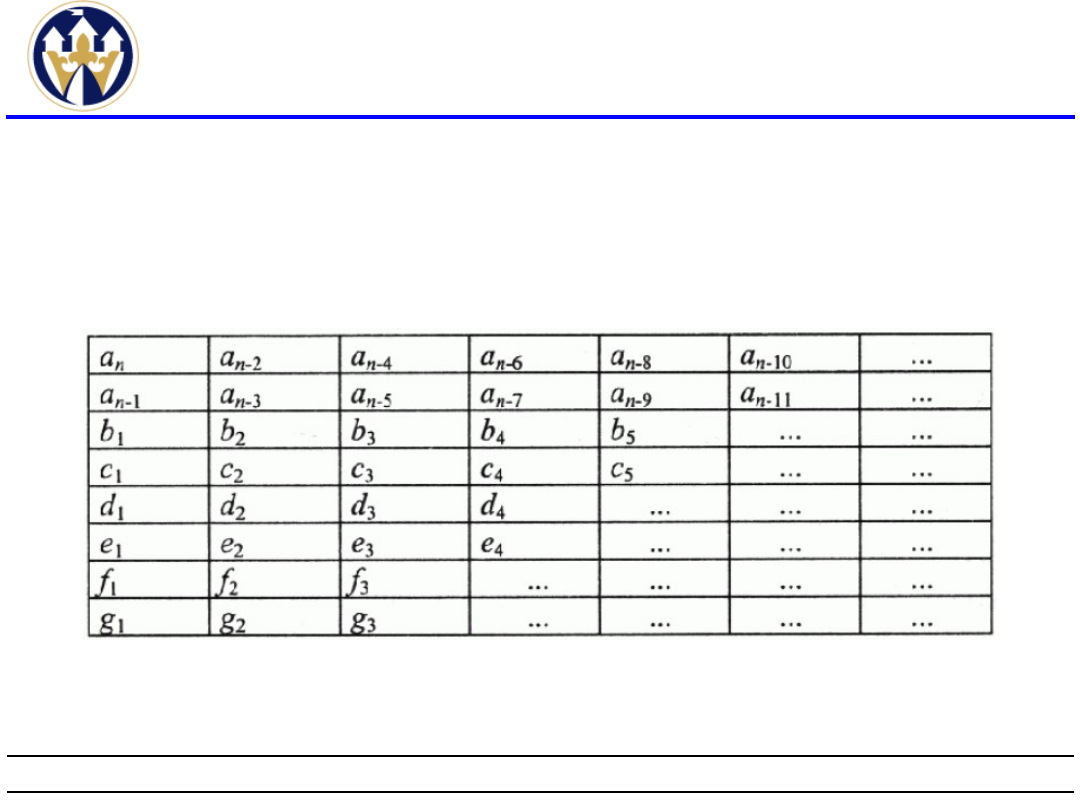
Kryterium Routha(1)
Według Routha układ automatycznej regulacji
będzie stabilny wtedy i tylko wtedy, gdy
wszystkie wyrazy pierwszej kolumny tablicy
Routha są różne od zera oraz mają ten sam
znak.
Tablica Routha.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
24
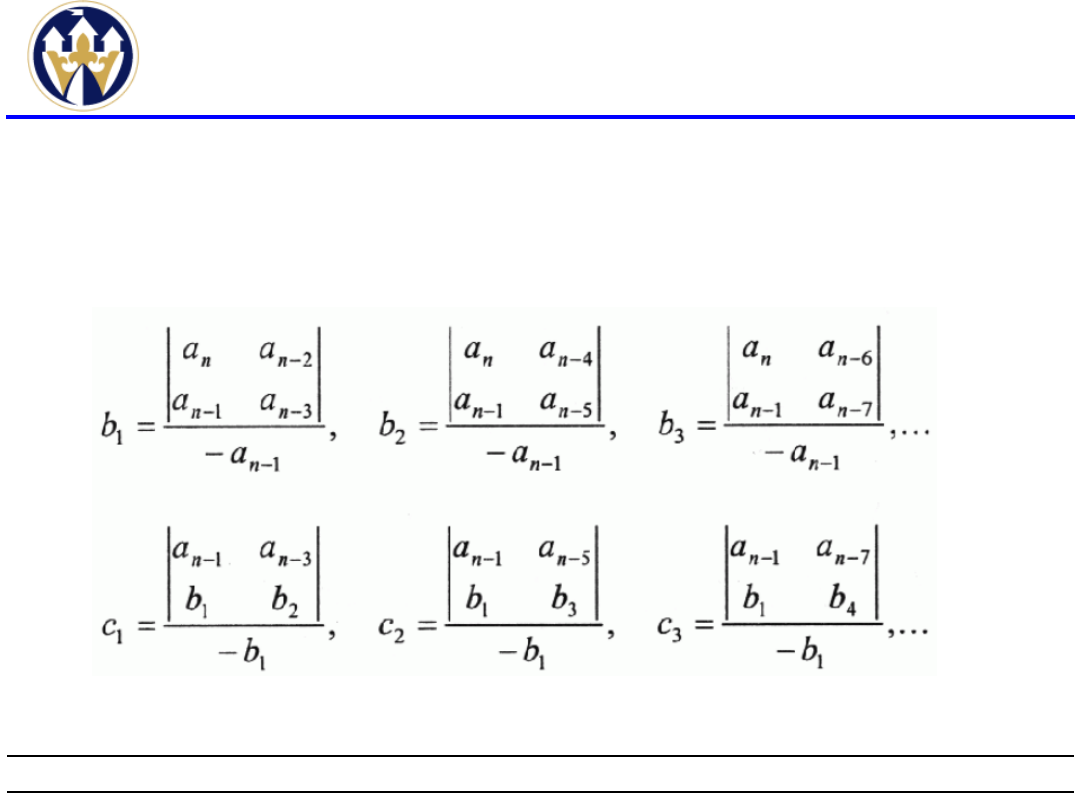
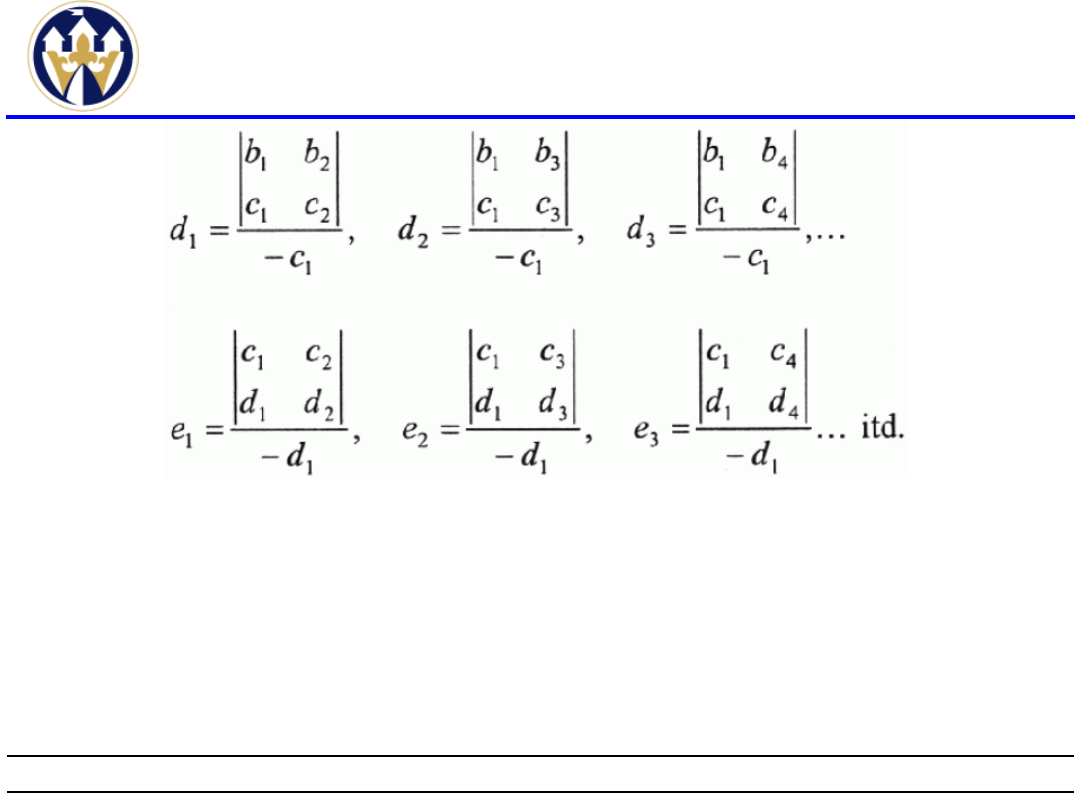
Kryterium Routha(2)
Poszczególne wyrazy b
1
, b
2
, ... , c
1
, c
2
, ... d
1
,
d
2
, ...
znajdujące się w kolejnych wierszach i
kolumnach określają wzory:
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
25
Kryterium Routha(3)
Jeżeli w pierwszej kolumnie tablicy Routha
występują wyrazy o rożnych znakach, to układ
jest niestabilny, a liczba zmian znaku jest równa
liczbie
pierwiastków
równania
charakterystycznego znajdujących się w prawej
półpłaszczyźnie zmiennej zespolonej s.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
26
Kryterium Nyquista(1)
Kryterium Nyquista to kryterium o bardzo
dużym znaczeniu praktycznym. Ocenia ono
stabilność układu zamkniętego na podstawie
badania
przebiegu
charakterystyki
częstotliwościowej
układu
otwartego
powstałego przez otwarcie pętli sprzężenia
zwrotnego układu automatycznej regulacji.
Jeżeli sygnał sinusoidalnie zmienny, który może
być
składnikiem
widma
wszechobecnych
szumów wniknie w dowolnym miejscu do
układu, to po obiegnięciu pętli
jaką tworzą elementy układu zamkniętego
ulega przetworzeniu polegającemu na zmianie
amplitudy i fazy. Ze względu na
ujemny znak sprzężenia
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
27
zwrotnego, sygnał o takiej częstotliwości, przy
której po przejściu przez elementy tworzące
pętlę zmieni fazę na przeciwną, ulegnie
podtrzymaniu.
Jeżeli
moduł
transmitancji
widmowej pętli będzie dla tej częstotliwości
większy od jedności to po każdym obiegnięciu
pętli amplituda sygnału zwiększy się. Sygnał
będzie rósł teoretycznie nieograniczenie, a więc
układ będzie niestabilny.
Gdy w układzie zamkniętym występują drgania
o określonej amplitudzie i pulsacji to:
Kryterium Nyquista(2)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
28
Kryterium Nyquista(3)
Wobec powyższego wnioskujemy, że gdy w
układzie zamkniętym występują drgania to
charakterystyka
amplitudowo-fazowa
stabilnego układu otwartego przechodzi przez
punkt (-1,j0).
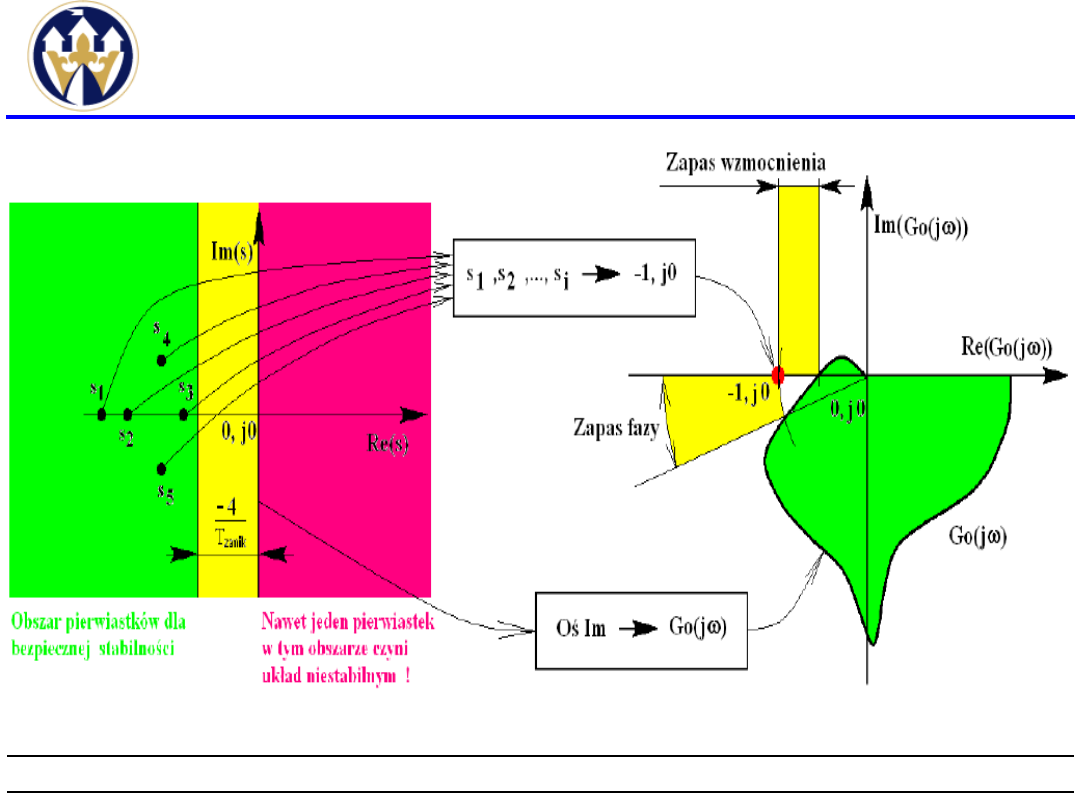
Warunkiem stabilności układu z ujemnym
sprzężeniem zwrotnym jest by punkt o
współrzędnych
(-1,j0) - nazywany „punktem Nyquista” leżał
poza obszarem płaszczyzny ograniczonym linią
charakterystyki amplitudowo - fazowej układu
otwartego. Do oceny stabilności układu
niezbędny jest jeden wykres charakterystyki
amplitudowo - fazowej.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
29
Kryterium Nyquista(4)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
30
Kryterium Nyquista(5)
Istotną
zaletą
kryterium
Nyquista
jest
możliwość bardzo łatwego oszacowania zapasu
stabilności układu określanego jedną z dwu
charakterystycznych wielkości:
a)
zapas
współczynnika
wzmocnienia
występującego w układzie otwartym
b)
zapas
kąta
fazowego
przesunięcia
występującego w układzie otwartym
Znajomość tych dwu wielkości pozwala łatwo
zoptymalizować
nastawy
poszczególnych
członów układu regulacji występujących w torze
głównym i w torze ujemnego sprzężenia
zwrotnego.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
31
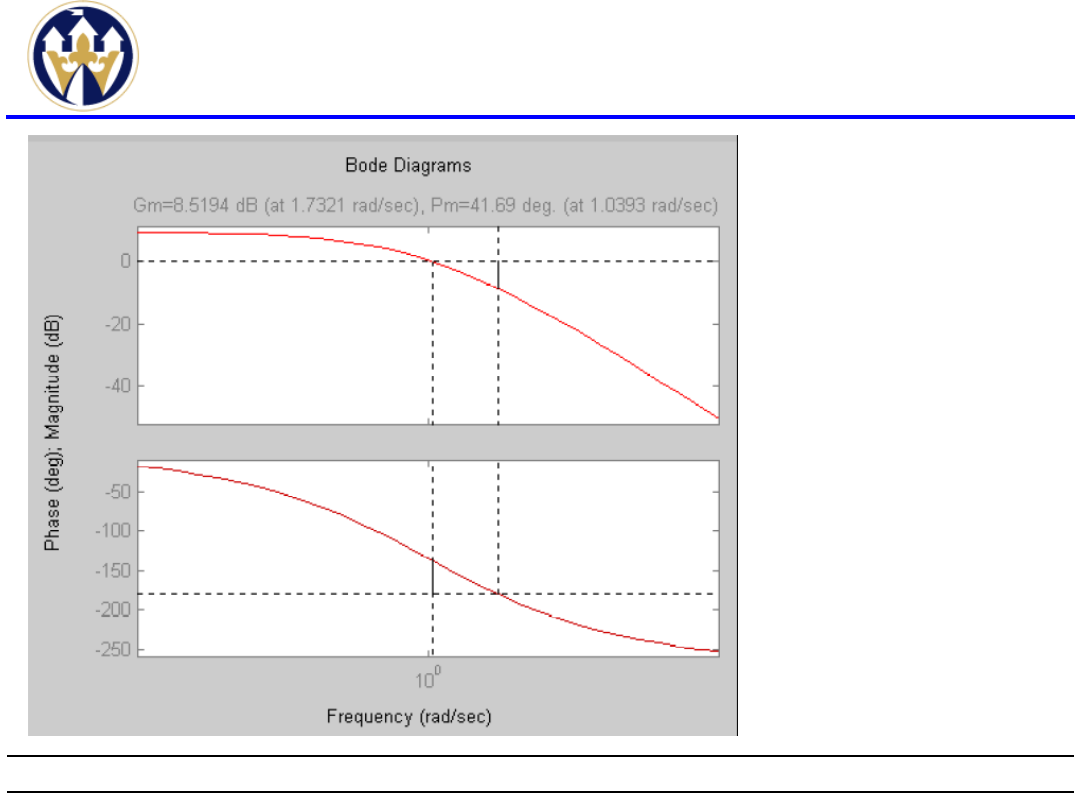
Kryterium Nyquista(6)
Zapas
amplitudy
oraz fazy,
wykres
logarytmiczn
y Bodego.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
32
Kryterium Michajłowa(1)
Kryterium Michajłowa umożliwia badanie
stabilności liniowego układu automatycznej
regulacji na podstawie przebiegu wielomianu
M(jω) będącego mianownikiem transmitancji
widmowej G(jω) na płaszczyźnie zmiennej
zespolonej s.
Równanie charakterystyczne M(jω) może
być przedstawione w postaci:
każdy z czynników (jω - s
i
) można przedstawić
na płaszczyźnie zmiennej zespolonej s jako
różnicę dwóch wektorów.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
33
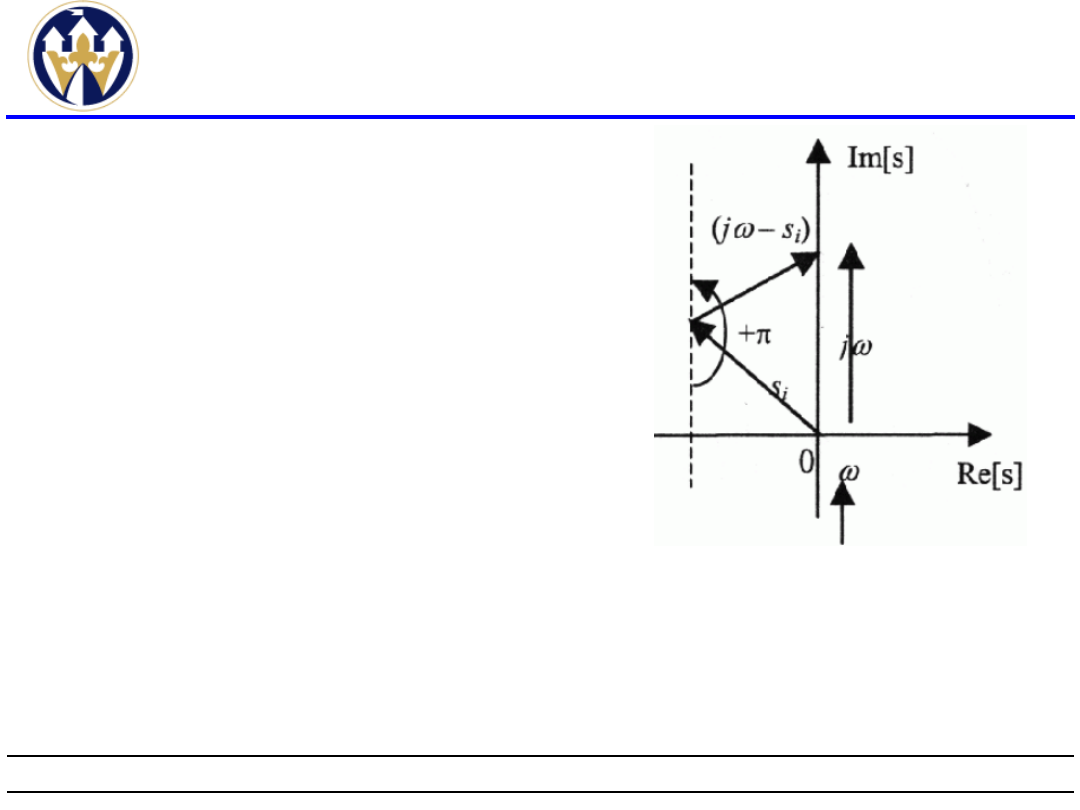
Kryterium Michajłowa(2)
Zmiana
argumentu
każdego czynnika (jω - s
i
)
przy zmianie pulsacji ω
od
-∞
do
+∞
dla
pierwiastków leżących w
lewej
półpłaszczyźnie
płaszczyzny
zespolonej
wynosi +π w kierunku
przeciwnym do ruchu
wskazówek zegara , a w
prawej -π w kierunku
zgodnym
do
ruchu
wskazówek zegara.
Zmiana argumentu
wektora (jω - s
i
)
przy zmianie ω od
-∞ do +∞ dla
Re(s
i
)<0.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
34
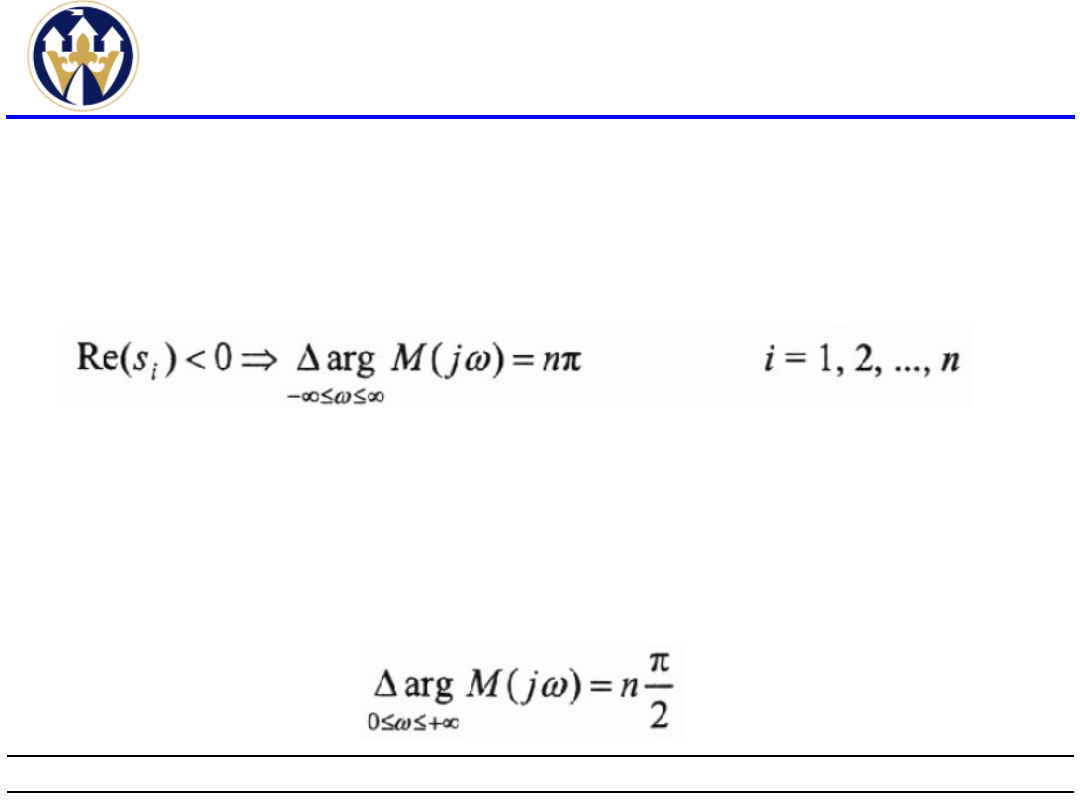
Kryterium Michajłowa(3)
Ponieważ w układzie stabilnym wszystkie
pierwiastki
musza
leżeć
w
lewej
półpłaszczyźnie
płaszczyzny
zespolonej
zmiennej s, to dla układu stabilnego mamy:
Wykorzystując fakt symetrii funkcji M(jω)
względem osi rzeczywistej dla dodatnich i
ujemnych ω, sprawdzenie stabilności można
ograniczyć
do
sprawdzenia
przyrostu
argumentu tylko dla dodatnich ω i przyrostu
argumentu stabilnego układu wynosi:
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
35
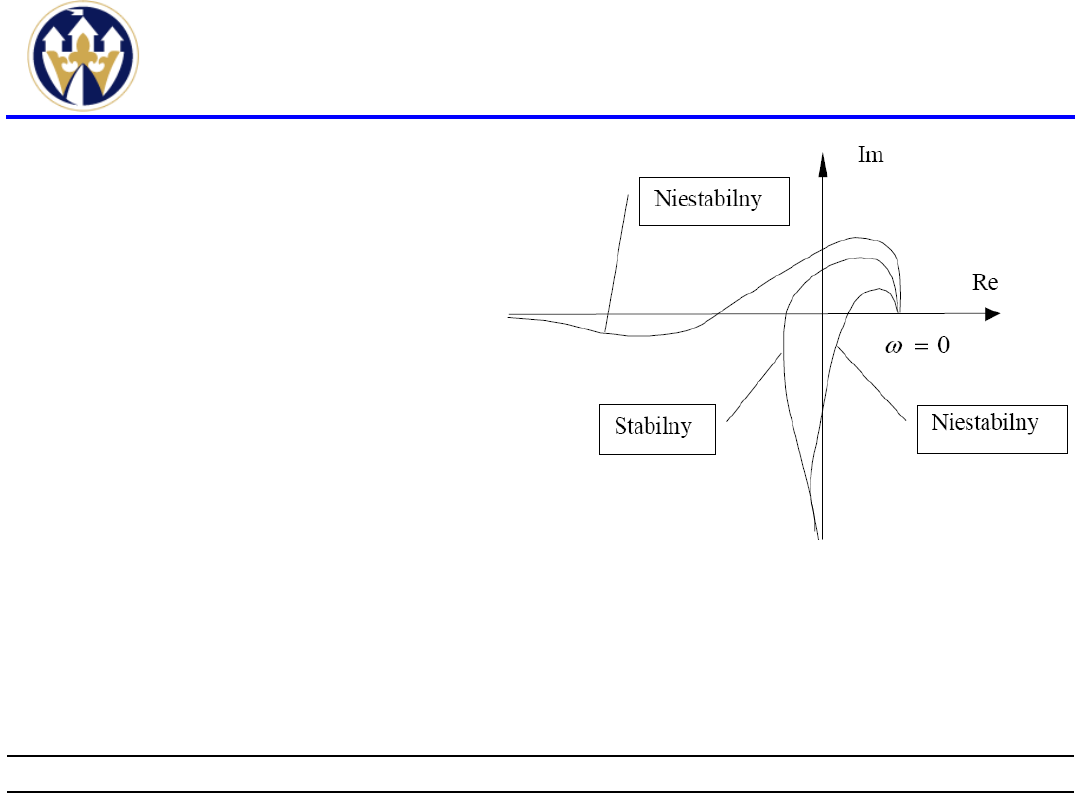
Kryterium Michajłowa(4)
Wykres
krzywej
M(jω) odpowiadający
stabil-nemu
układowi
przejdzie
przy zmianie ω od -∞
do +∞ przez n
ćwiartek w kierunku
przeciwnym
do
ruchu
wskazówek
zegara (w stosunku
do początku układu
współrzędnych),
gdzie
n
jest
najwyższą potęgą s
równania
charakterystycznego
.
Przykładowe
przebiegi krzywej
M(jω) dla obiektów
trzeciego rzędu.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
36
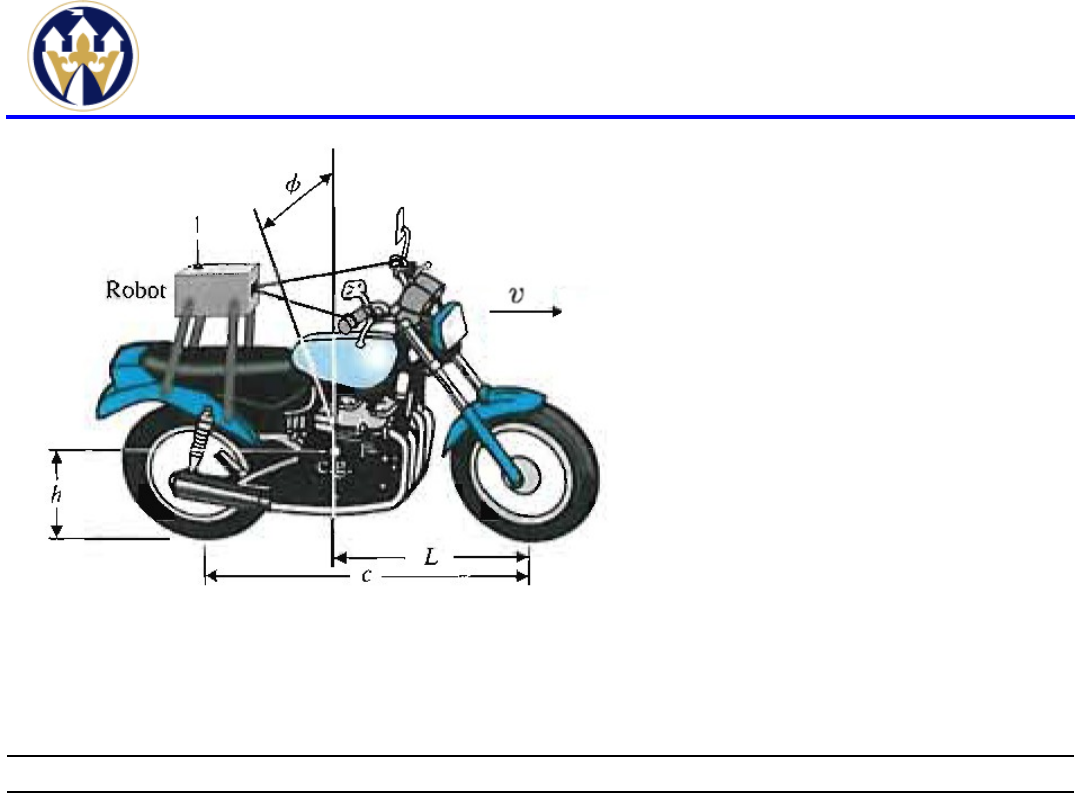
Przykład badania
stabilności(1)
Motor sterowany
robotem, gdzie v-
stała prędkość,
c.g.-środek
ciężkości, h-
wysokość podłoża
do c.g., c-
odległość
pomiędzy środkami
kół, L- pozioma
odległość
pomiędzy kołem
przednim a c.g., φ-
kąt odchylenia od
pionu.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
37
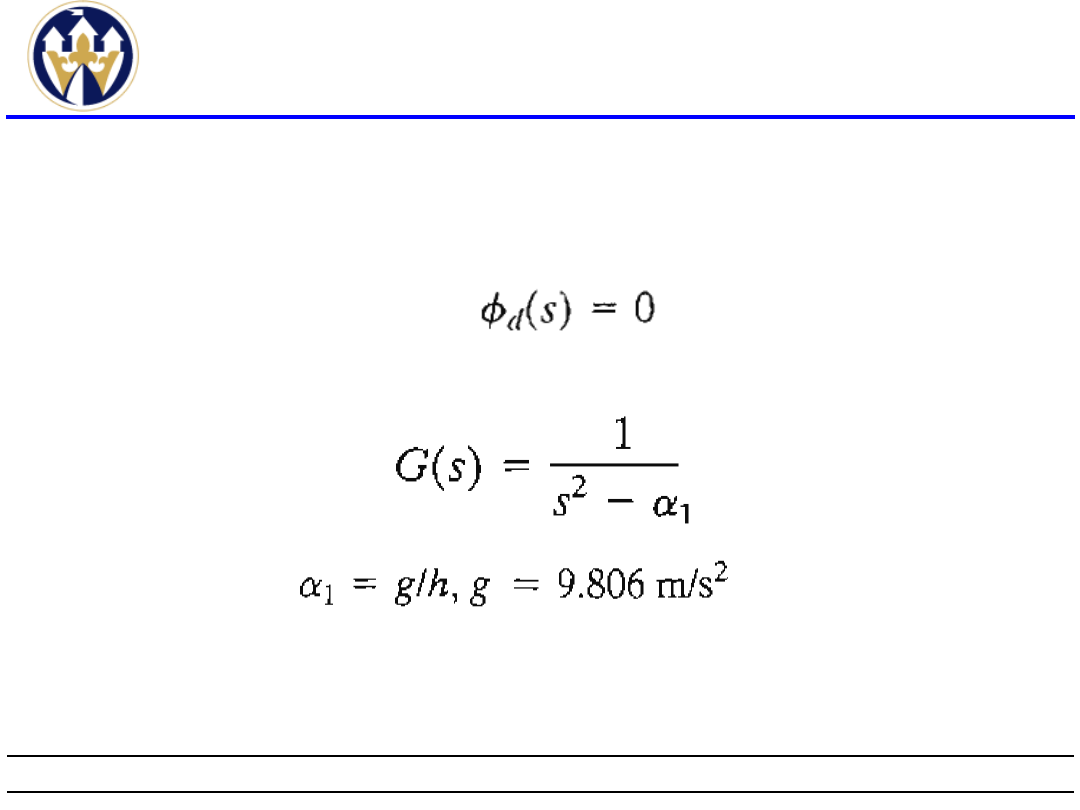
Przykład badania
stabilności(2)
Motor ma być tak sterowany aby poruszał się
po linii prostej, ze stałą prędkością. Oczekiwany
kąt odchylenia od pionu powinien wynosić
zero:
Model motoru opisuje następująca funkcja
przejścia:
gdzie:
Model motoru w układzie otwartym jest
niestabilny.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
38
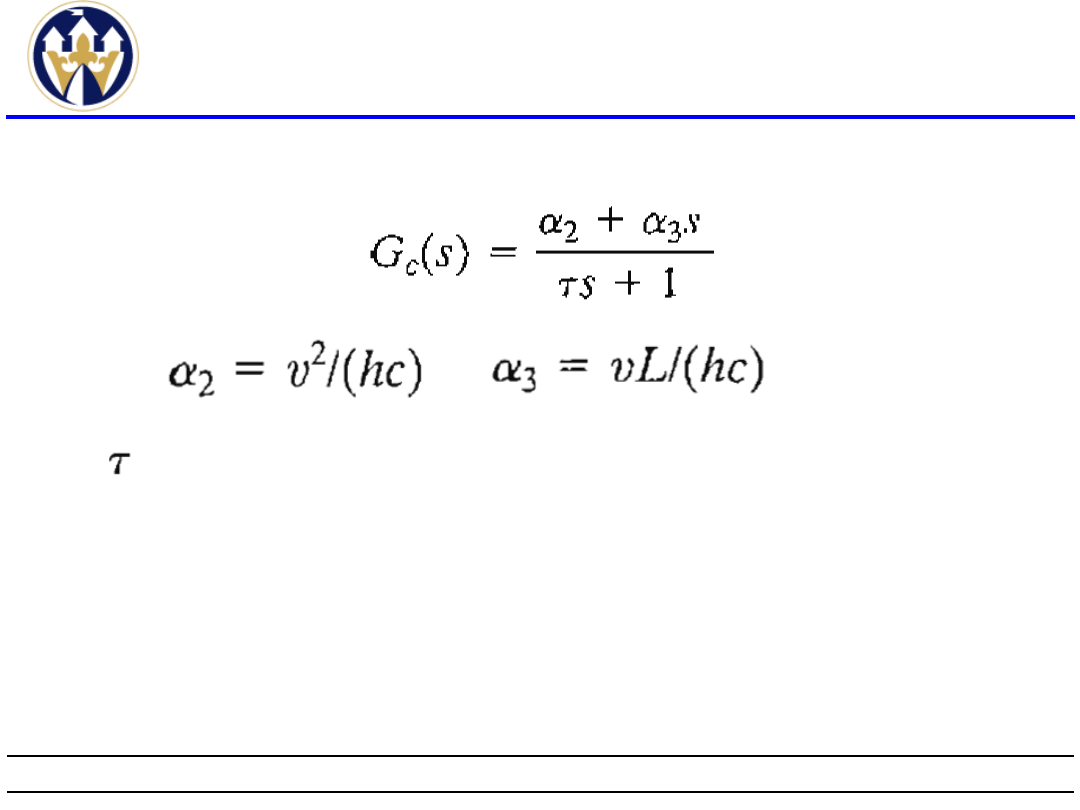
Przykład badania
stabilności(3)
Model regulatora opisuje następująca funkcja
przejścia:
gdzie:
- stała czasowa określająca szybkość
odpowiedzi
regulatora
Aby otrzymać układ stabilny wprowadzamy
pętlę sprzężenia zwrotnego i określamy
zakresy wzmocnień sprzężonych K
P
i K
D
dla
jakich układ zamknięty będzie stabilny.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
39
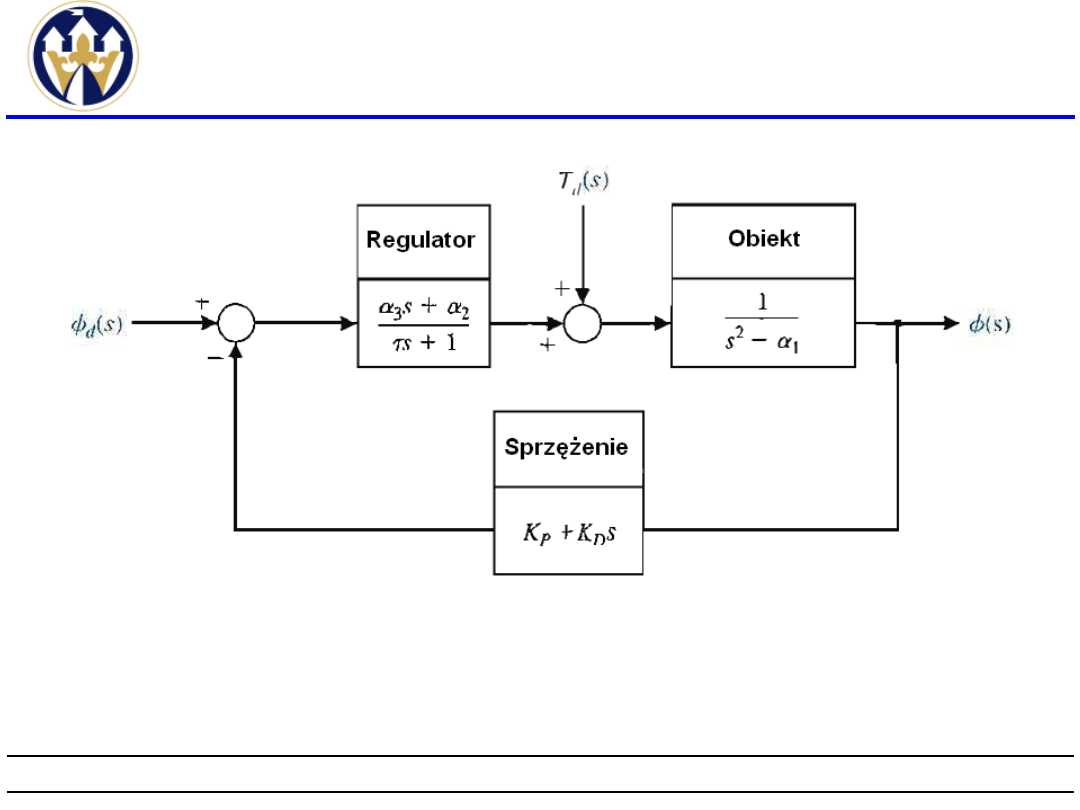
Przykład badania
stabilności(4)
Schemat układu zamkniętego dla modelu
motocykla sterowanego robotem.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
40
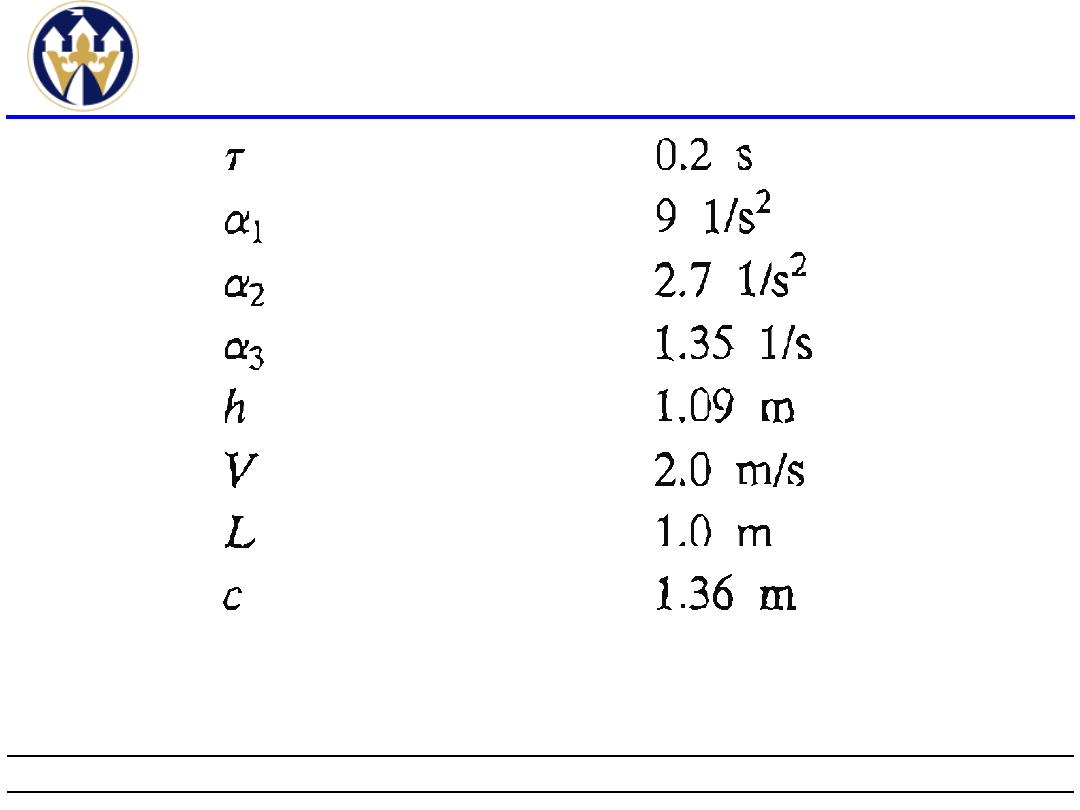
Przykład badania
stabilności(5)
Wartości parametrów fizycznych dla modelu
motocykla sterowanego robotem.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
41
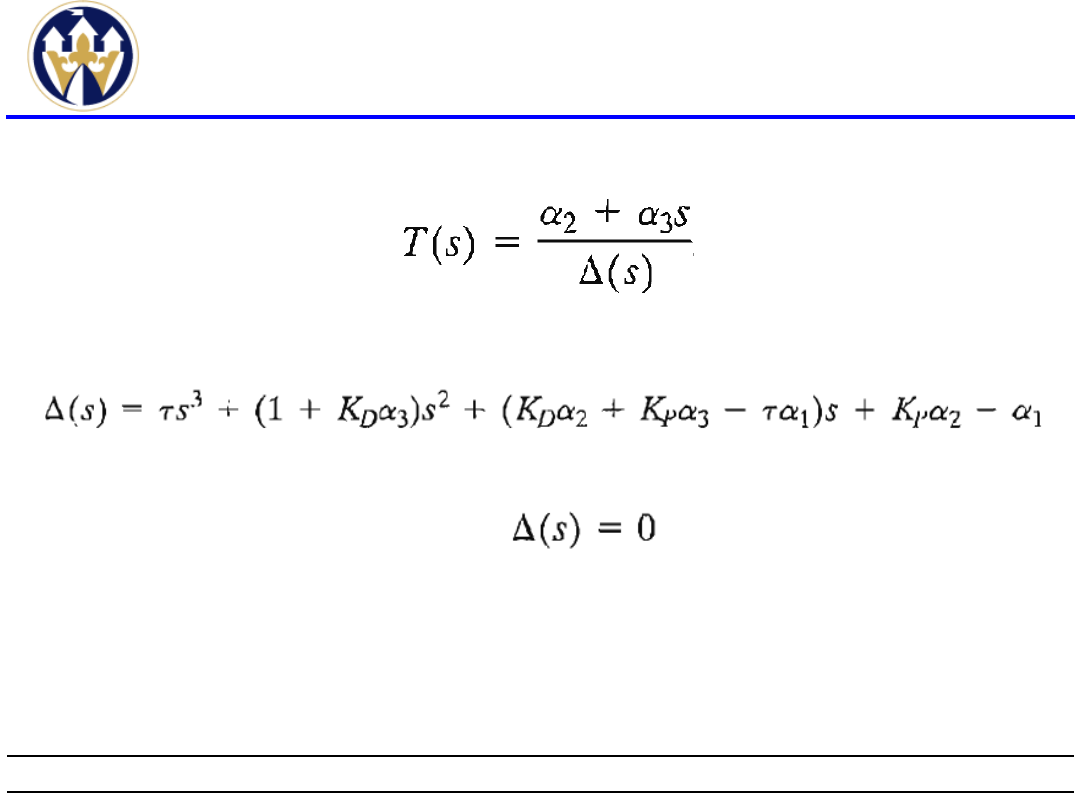
Przykład badania
stabilności(6)
Funkcja przejścia układu zamkniętego wynosi:
gdzie:
Równanie charakterystyczne to:
Należy wyznaczyć dla jakich wartości K
P
i K
D
pierwiastki
równania
charakterystycznego
znajdują się w lewej półpłaszczyźnie.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
42
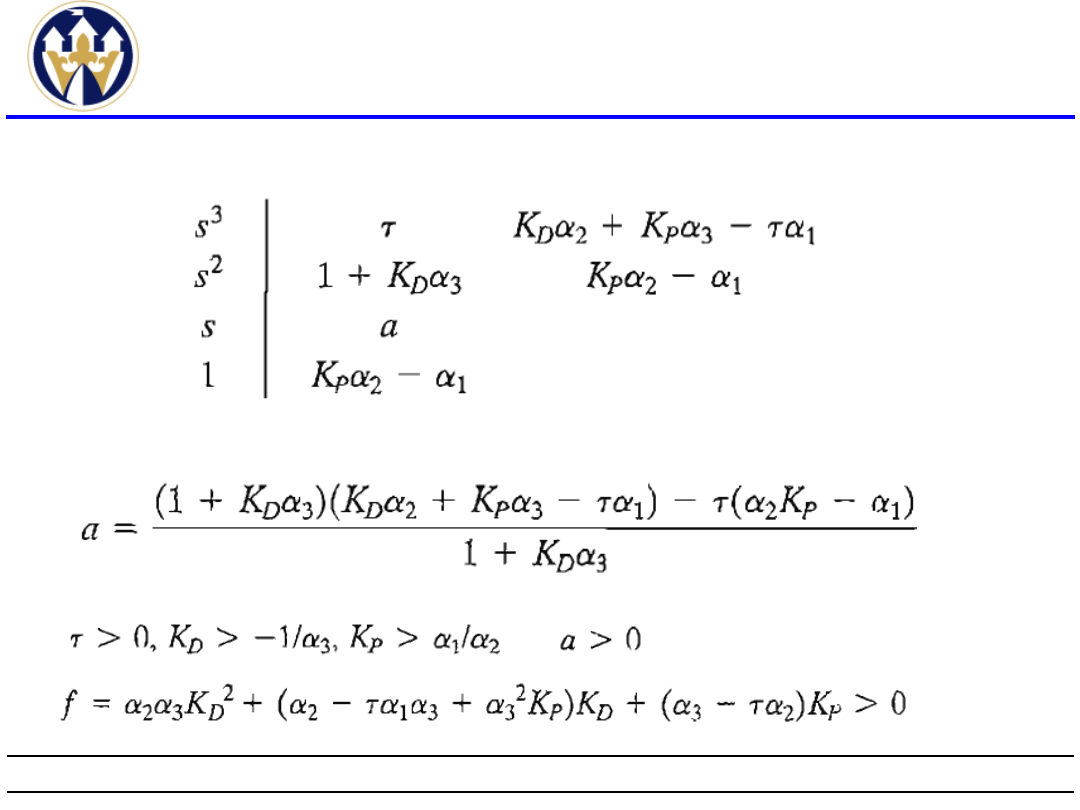
Przykład badania
stabilności(7)
Na podstawie Kryterium Routha:
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
43
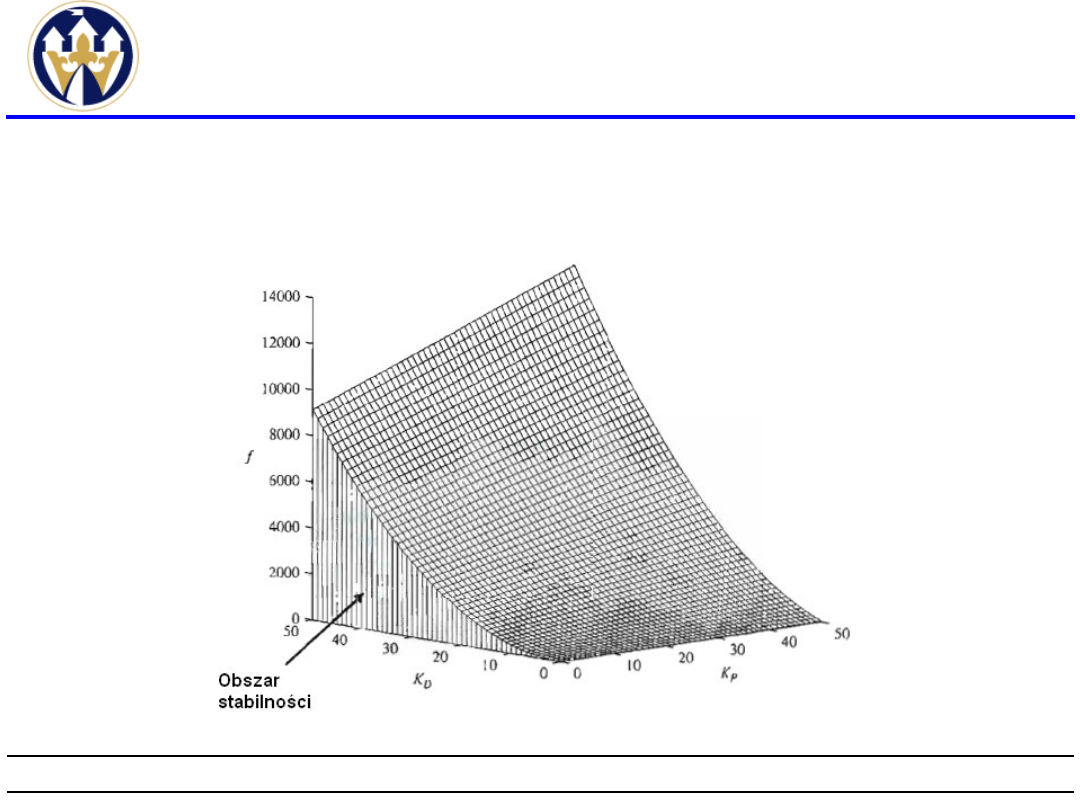
Przykład badania
stabilności(8)
Po uwzględnieniu wszystkich warunków obszar
stabilności występuje przy K
D
>0 i K
P
>3,33.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
44
Stabilność obiektów
nieliniowych(1)
Cechy obiektów nieliniowych mogą zależeć
od poziomu sygnałów zewnętrznych. Jednemu
poziomowi sterowania może odpowiadać jeden,
dwa, lub więcej stanów równowagi.
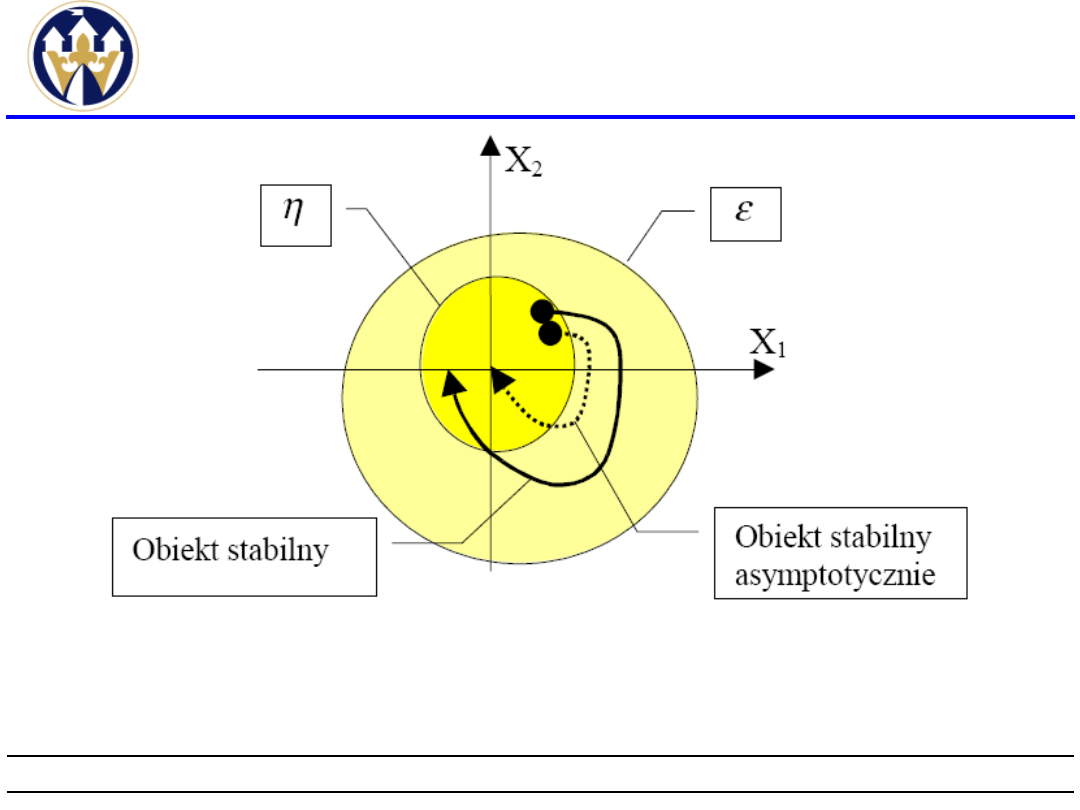
Do oceny stabilność punktu równowagi
posługuje się definicją stabilności lokalnej
Lapunowa: punkt równowagi nazywamy
stabilnym, jeżeli dla każdego, dowolnie małego
obszaru ε odchyleń od stanu równowagi można
dobrać taki obszar η warunków początkowych,
że cała trajektoria startująca z obszaru η
będzie zawarta w obszarze ε. Jeżeli dodatkowo
trajektoria zmierza do wymienionego punktu
równowagi to stan równowagi w tym punkcie
nazywamy stabilnym asymptotycznie.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
45
Stabilność obiektów
nieliniowych(2)
Definicja Lapunowa dla obiektu nieliniowego
drugiego rzędu.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
46
Projektowanie liniowych
układów regulacji(1)
Projektowanie
układu
wymaga
przeanalizowania wymogów przejściowych.
Charakter
przebiegów
przejściowych
w
liniowych układach sterowania w dziedzinie
czasu jest badany po podaniu funkcji skokowej
(jednostkowej) 1(t) na wejście układu.
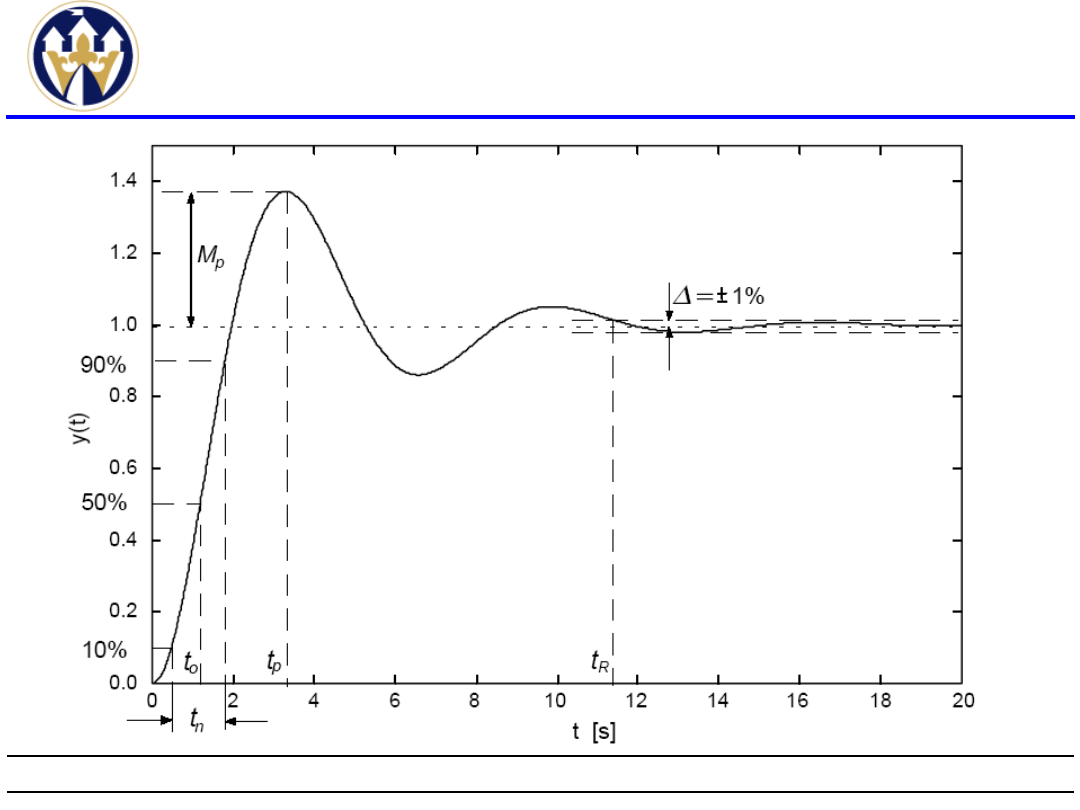
Na podstawie tej odpowiedzi definiowane są
następujące wskaźniki jakości w stanie
przejściowym:
Maksymalne przeregulowanie M
p
M
p
= y
max
− y
u
gdzie:
y(t) − odpowiedź skokowa układu,
y
max
− maksymalna wartość y(t),
y
u
− wartość y(t) w stanie ustalonym (y
u
≤
y
max
).
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
47
Projektowanie liniowych
układów regulacji(2)
Czas opóźnienia t
o
definiowany jako czas po
którym odpowiedź skokowa osiąga 50% swojej
wartości końcowej.
Czas narastania t
n
definiowany jest jako czas
potrzebny do wzrostu odpowiedzi skokowej
układu od 10% do 90% wartości ustalonej.
Czas ustalania (regulacji) t
R
definiowany
jako czas potrzebny do tego aby przejściowa
odpowiedź skokowa znalazła się i pozostała w
pewnej określonej strefie dokładności (% 1 ± ,
% 2 ± , itd.) od wartości ustalonej. Najczęściej
jest to 5% wartości ustalonej.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
48
Projektowanie liniowych
układów regulacji(3)
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
49
Projektowanie liniowych
układów regulacji(4)
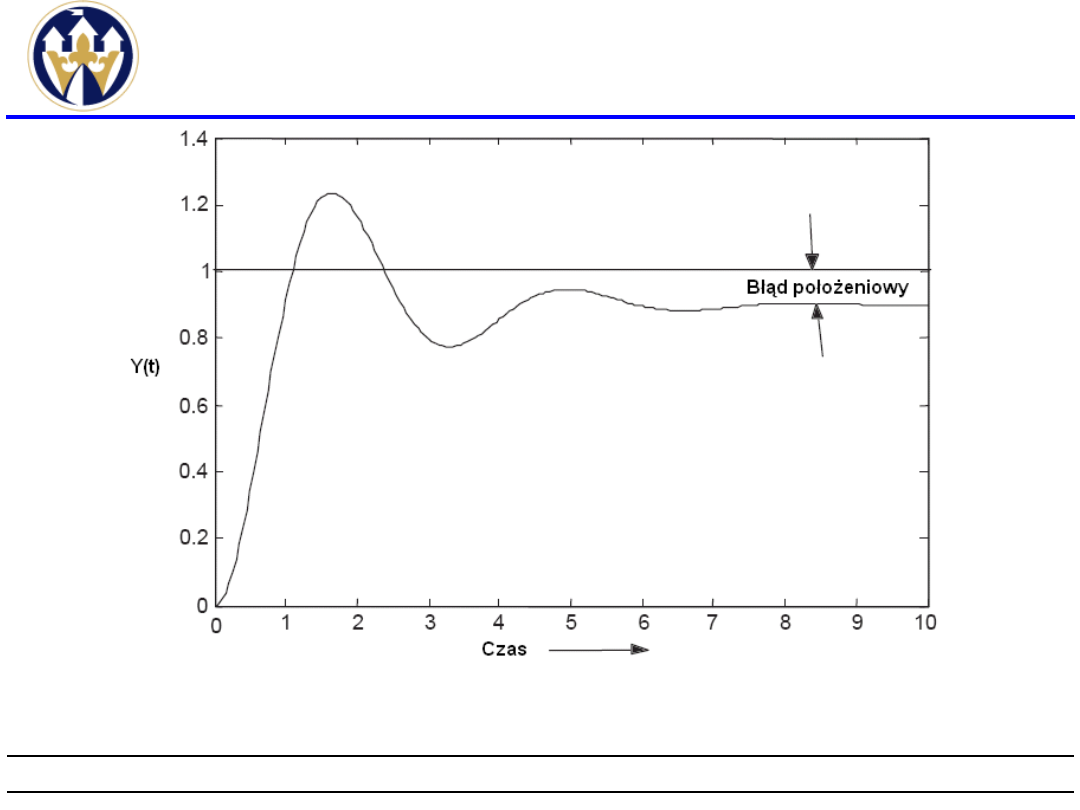
Wskaźniki jakości w stanie ustalonym:
Błąd statyczny e
u
Przez błąd statyczny (zwany również błędem
położeniowym) rozumiemy wielkość błędu,
który
pozostaje
po
zaniku
stanów
dynamicznych. W układzie liniowym poziom
danego sygnału jaki odpowiada nowemu
stanowi równowagi, po zmianach wielkości
wejściowych, możemy wyliczyć na podstawie
znajomości transformat sygnałów wejściowych
i transmitancji łączących te sygnały z
interesującym nas wyjściem.

UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
50
Projektowanie liniowych
układów regulacji(5)
Przy analizowaniu układu automatyki, ze
sprzężeniem
zwrotnym
wpływ
sygnału
zadanego w(t) i zakłócenia z(t) można
rozpatrywać oddzielnie, co oznacza, że błąd
położeniowy jest sumą dwóch składowych i
wynosi:
gdzie:
e
wu
- błąd położeniowy wywołany zmianą
sygnału wymuszającego przy z(t)=0
e
zu
- błąd położeniowy wywołany zmianą
zakłócenia przy w(t)=0
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
51
Projektowanie liniowych
układów regulacji(6)
Odpowiedź na skok jednostkowy z
zaznaczonym błędem położeniowym.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
52
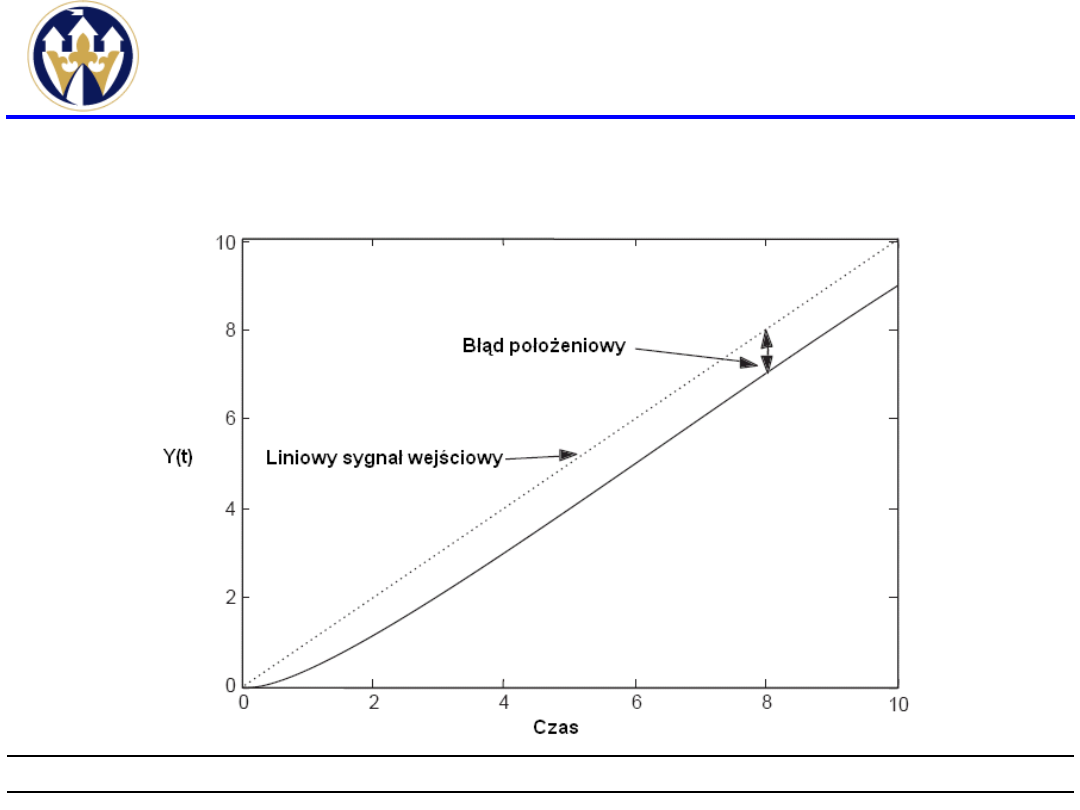
Projektowanie liniowych
układów regulacji(7)
Błąd prędkościowy e
v
czyli błąd w stanie
ustalonym przy wymuszeniu sygnałem liniowo
narastającym.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
53
Projektowanie liniowych
układów regulacji(8)
W projektowaniu liniowych układów sterowania
z użyciem metod w dziedzinie częstotliwości,
konieczne jest zdefiniowanie zbioru nowych
wskaźników jakości układu.
Najczęściej używane wskaźniki w dziedzinie
częstotliwości:
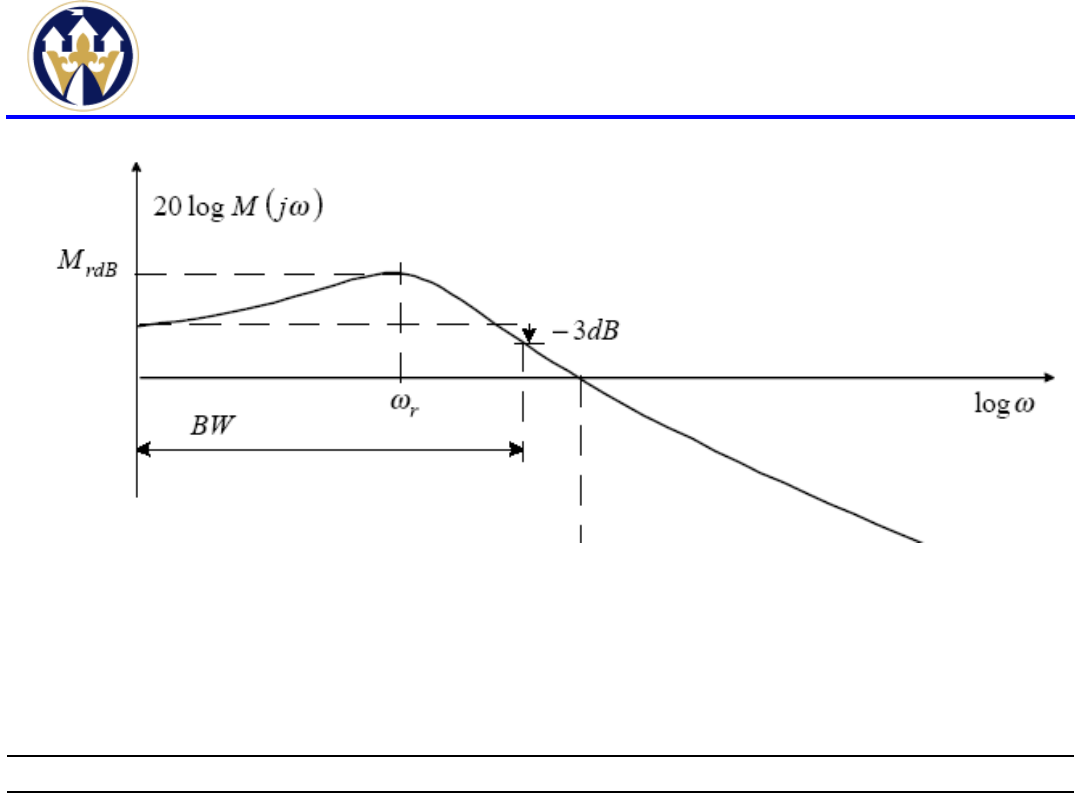
Moduł rezonansowy M
rdB
wyrażony w
decybelach (dB) jest maksymalną wartością
charakterystyki
amplitudowej
20logM(jω).
Amplituda
M
rdB
pozwala
na
określenie
stabilności
względnej
stabilnego
układu
zamkniętego. Zazwyczaj duże wartości M
rdB
odpowiadają
dużym
wartościom
maksymalnego przeregulowania odpowiedzi
skokowej.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
54
Projektowanie liniowych
układów regulacji(9)
Częstotliwość
rezonansowa
ω
r
jest
częstotliwością przy której występuje moduł
rezonansowy.
Szerokość pasma BW (pasmo przenoszenia)
jest zakresem częstotliwości od zera do
częstotliwości (zwanej częstotliwością odcięcia)
przy której charakterystyka amplitudowa
20logM(jω) różni się o conajmniej 3 dB od jego
amplitudy przy zerowej częstotliwości. Pasmo
BW określa szybkość odpowiedzi układu i
wzrost
częstotliwości
odcięcia
powoduje
zwiększenie szybkości odpowiedzi układu.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
55
Projektowanie liniowych
układów regulacji(10)
Przykładowa logarytmiczna charakterystyka
amplitudy.
UKW, dr ing. Sebastian Kula 2010
Podstawy Automatyki
56
•Thank you !
•Vielen Dank !
•Cпасибо !
•Dziękuje !
Document Outline
- Slide 2
- Plan wykładu
- Badanie stabilności(1)
- Badanie stabilności(2)
- Badanie stabilności(3)
- Badanie stabilności(4)
- Badanie stabilności(5)
- Badanie stabilności(6)
- Badanie stabilności(7)
- Badanie stabilności(8)
- Badanie stabilności(9)
- Badanie stabilności(10)
- Badanie stabilności(11)
- Badanie stabilności(12)
- Kryterium Hurwizta(1)
- Kryterium Hurwizta(2)
- Kryterium Hurwizta(3)
- Kryterium Hurwizta(4)
- Kryterium Hurwizta(5)
- Kryterium Hurwizta(6)
- Kryterium Hurwizta(7)
- Kryterium Routha(1)
- Kryterium Routha(2)
- Kryterium Routha(3)
- Kryterium Nyquista(1)
- Kryterium Nyquista(2)
- Kryterium Nyquista(3)
- Kryterium Nyquista(4)
- Kryterium Nyquista(5)
- Kryterium Nyquista(6)
- Kryterium Michajłowa(1)
- Kryterium Michajłowa(2)
- Kryterium Michajłowa(3)
- Kryterium Michajłowa(4)
- Przykład badania stabilności(1)
- Przykład badania stabilności(2)
- Przykład badania stabilności(3)
- Przykład badania stabilności(4)
- Przykład badania stabilności(5)
- Przykład badania stabilności(6)
- Przykład badania stabilności(7)
- Przykład badania stabilności(8)
- Stabilność obiektów nieliniowych(1)
- Stabilność obiektów nieliniowych(2)
- Projektowanie liniowych układów regulacji(1)
- Projektowanie liniowych układów regulacji(2)
- Projektowanie liniowych układów regulacji(3)
- Projektowanie liniowych układów regulacji(4)
- Projektowanie liniowych układów regulacji(5)
- Projektowanie liniowych układów regulacji(6)
- Projektowanie liniowych układów regulacji(7)
- Projektowanie liniowych układów regulacji(8)
- Projektowanie liniowych układów regulacji(9)
- Projektowanie liniowych układów regulacji(10)
- Slide 56
Wyszukiwarka
Podobne podstrony:
Mech pod aut 2
Mech pod aut 5
Mech pod aut 1
Prop aut W9 Ses cyfr Przetworniki fotoelektryczne
Bitwa Pod Grunwaldem
p 43 ZASADY PROJEKTOWANIA I KSZTAŁTOWANIA FUNDAMENTÓW POD MASZYNY
Teor pod ped wczesnoszkolnej jak chwalić dziecko
aut prawa maja1041/9178
POMIAR NATĘŻENIA PRZEPŁYWU W PRZEWODZIE POD CIŚNIENIEM I KORYCIE OTWARTYM
KOTŁY OKRĘTOWE ZALICZENIE II MECH
a a q odpowiedzialność za działania syna pod wladzą lub niewolnika
(1967) GDY WSZYSTKIE NARODY ZJEDNOCZĄ SIĘ POD POD KTRÓLESTWEM BOŻYMid 888
więcej podobnych podstron