
Pędnik-
urządzenie wytwarzające siłę poruszającą
jednostki pływające w wyniku wytwarzania energii
dostarczanej przez silnik lub przez energię z zewnątrz.
Pod względem zasady działania
wyróżnia się:
pędnik o napędzie mięśniowym - wiosło
pędnik o napędzie wiatrowym - żagiel
pędnik o napędzie mechanicznym - koło łopatkowe, śruba
napędowa,
pędnik azymutalny, pędnik cykloidalny, pędnik wodno-
odrzutowy, pędnik
gazo-odrzutowy, śmigło.
Pędnik cykloidalny
Pędnik cykloidalny Voitha Schneidera
Propeller
Pomysł tego niezwykłego układu napędowego powstał w roku
1926, kiedy to austriacki inżynier Ernst Schneider projektując
turbinę wodną o nastawnych łopatkach doszedł do wniosku,
że może ona służyć jako pędnik jednostki pływającej. W dwa
lata później zbudowano holownik z prototypowym napędem,
nie posiadający steru, mogący poruszać się do przodu, do
tyłu, na boki, a nawet obracać się wokół własnej osi dzięki
odpowiedniemu sterowaniu kątem wychylenia łopatek jego
pędnika. Po wielu latach pracy nad tą konstrukcją, została
ona zaakceptowana przez cały świat.
Obszar zastosowań pędników Voith
Schneider Propeller:
holowniki typu Voith Water Tractor
holowniki eskortujące
statki ratownicze
statki pożarnicze
jednostki służące do usuwania zanieczyszczeń w postaci rozlewisk
ropy naftowej
dźwigi pływające
stawiacze boi i jednostki przystosowane do wykonywania szeregu
innych prac
przybrzeżnych
promy
jednostki do zadań specjalnych (trałowce i wykrywacze min w
służbie marynarki
wojennej).

Taniec holowników napędzanych
pędnikami cykloidalnymi

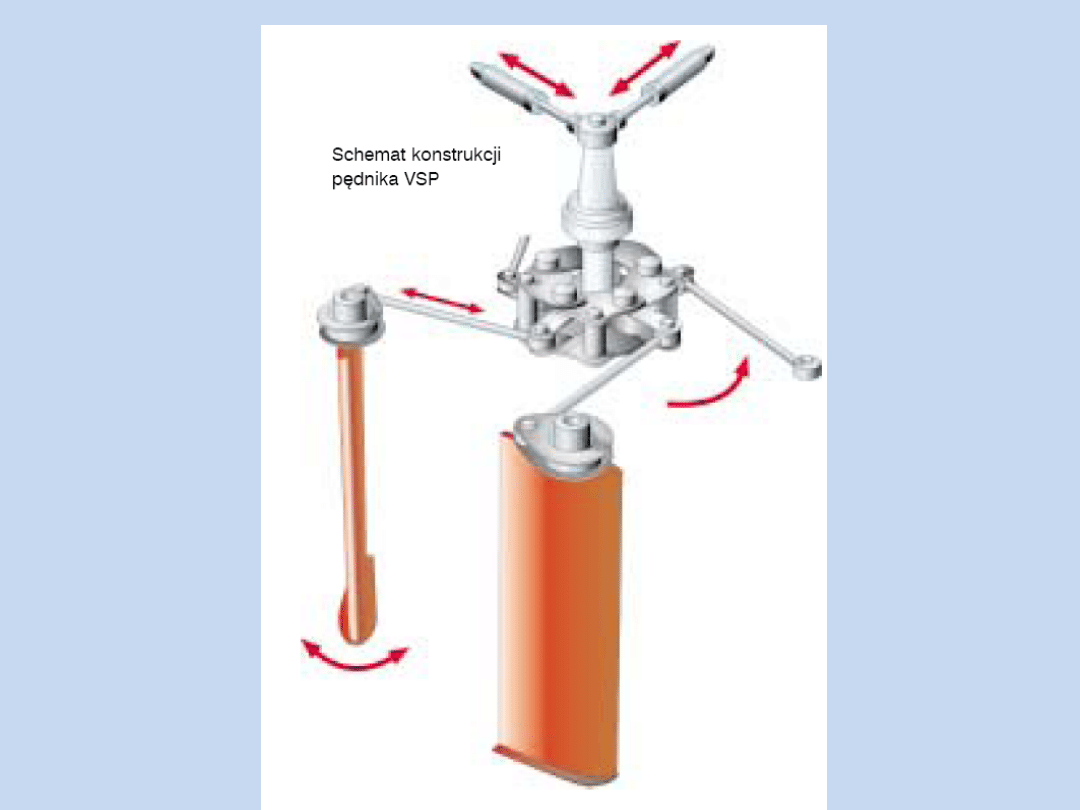
Zasada działania pędnika Voitha
Schneidera
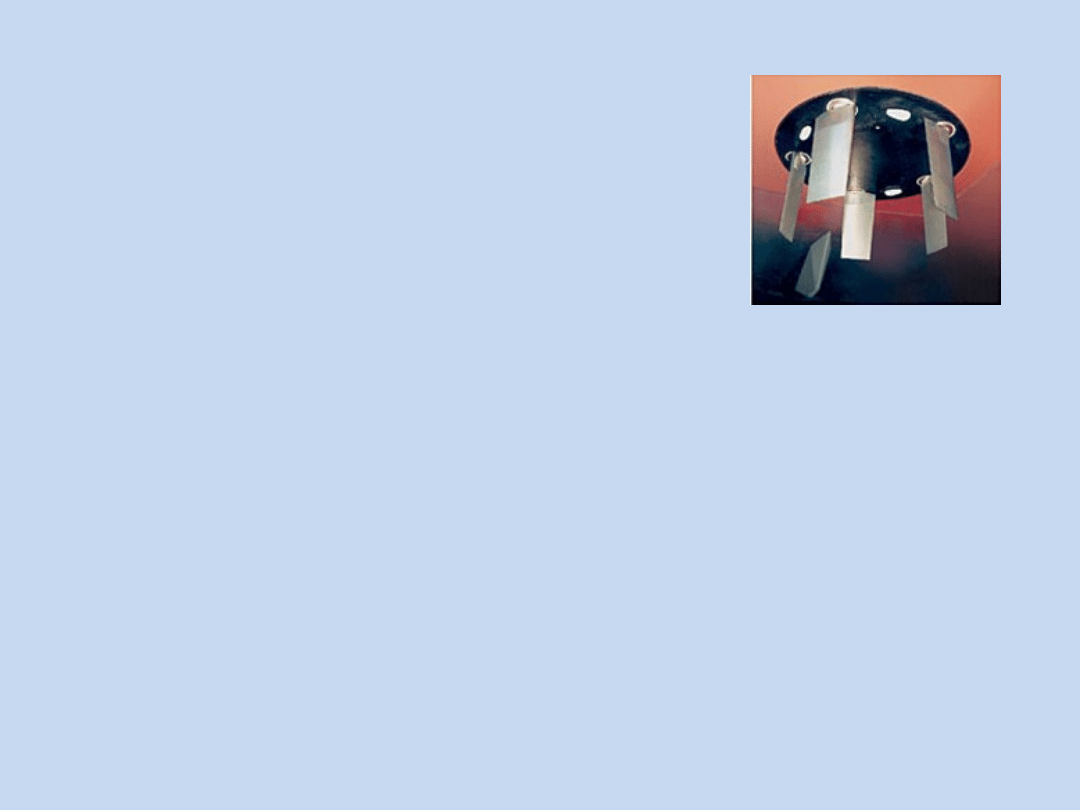
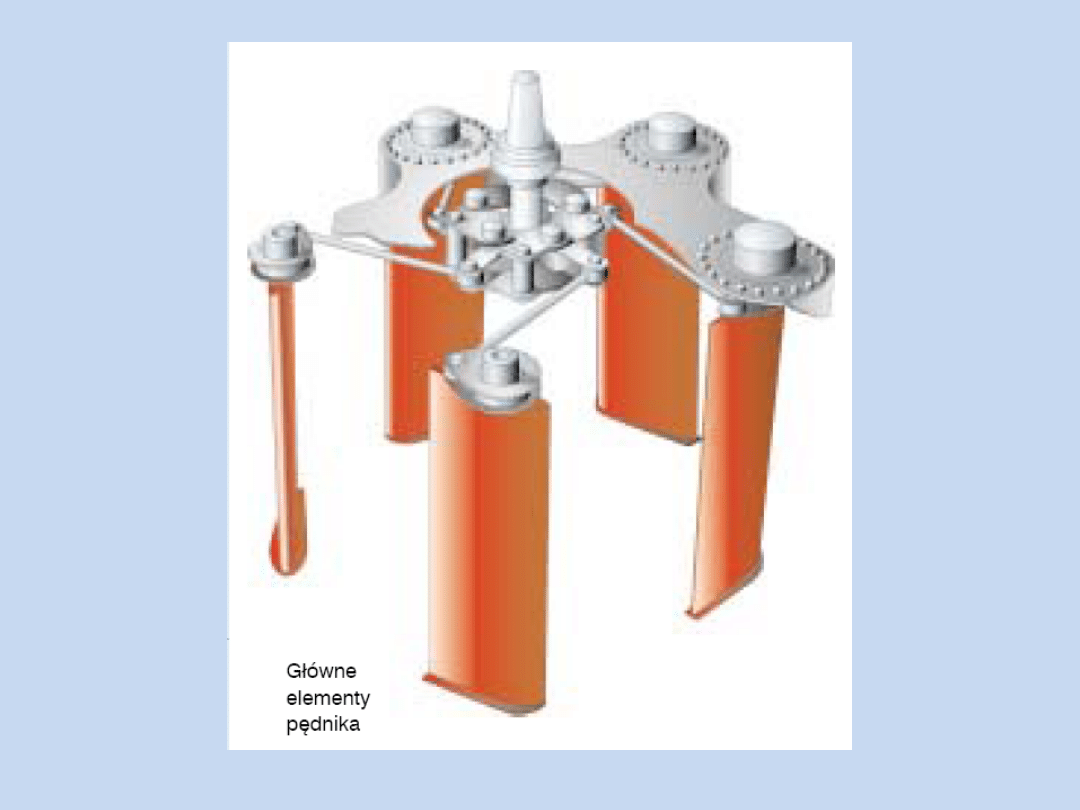
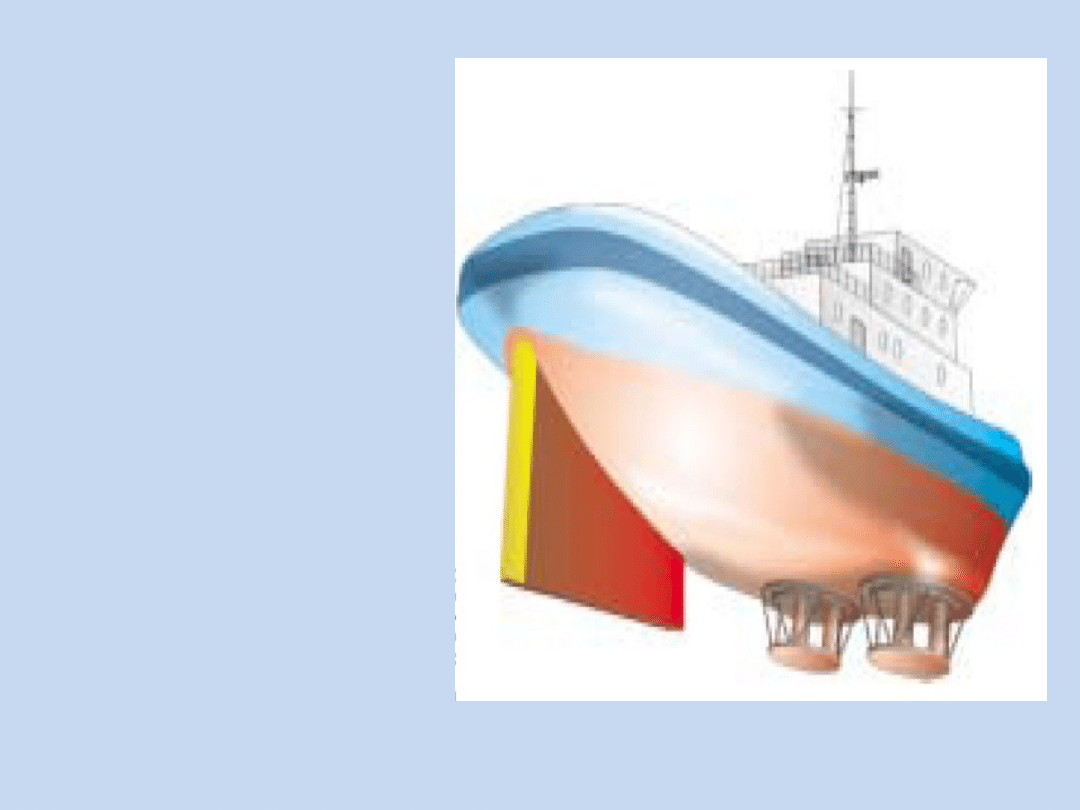
Łopatki napędowe (od 4 do 6) są zainstalowane na tarczy
obrotowej, pionowo w dół. Tarcza umieszczona jest na poziomie
kadłuba, a łopatki wystają poniżej, i w takiej właśnie pozycji
mogą obracać się wokół pionowej osi tarczy oraz wykonywać
ruchy wahadłowe wokół własnych osi. W trakcie obrotu każda z
łopatek ustawia się pod kątem odpowiednim do zadanego
kierunku ruchu. Tak powstaje siła napędowa. Zmiana ustawienia
kąta łopatek może odbywać się w czasie jednostajnego ruchu
obrotowego tarczy, bez potrzeby jej zatrzymania. Kąt
zaklinowania łopatek określa siłę ciągu, a położenie w zakresie
0 - 360° ustawia kierunek. Dzięki temu ciąg o takiej samej
wartości może być wytwarzany we wszystkich kierunkach, co
czyni z pędnika VSP idealny napęd.
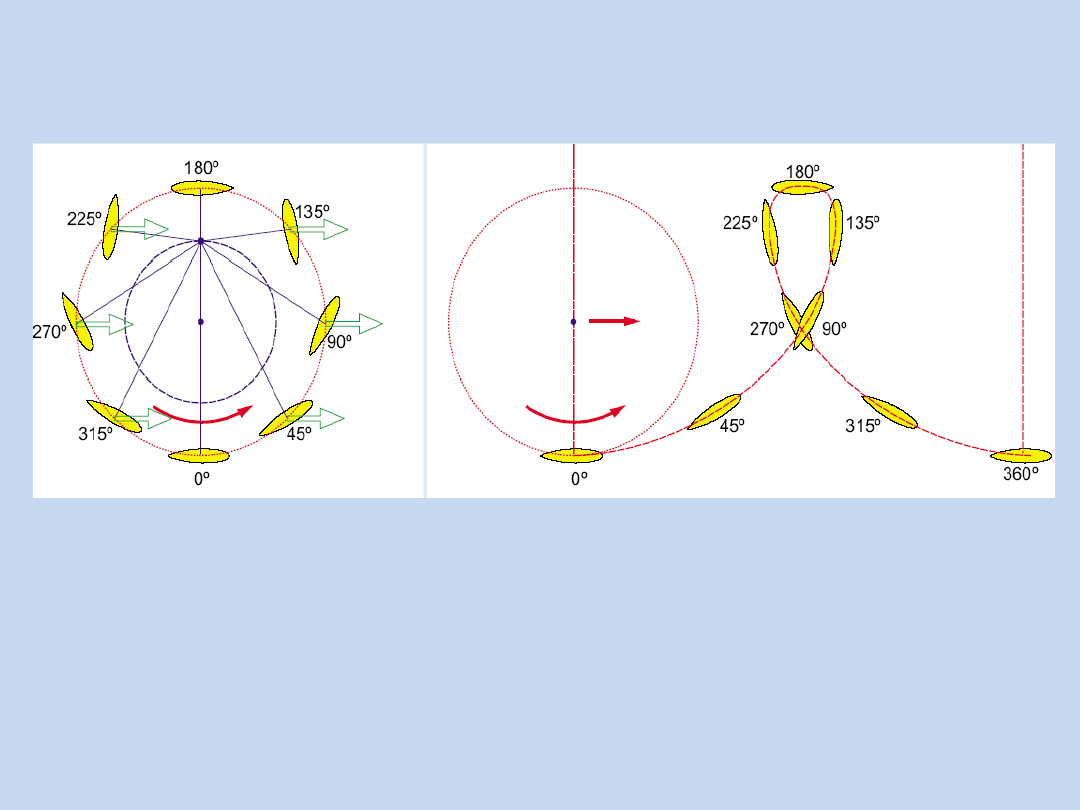
W czasie jednego obrotu
pędnika łopatka cały czas
zmienia kąt ustawienia.
Tor ruchu jednej łopatki w
czasie poruszania się
holownika (cykloida).
Statek może stać w miejscu, a pędniki będą wirować, zachowując
zerowy kąt natarcia i nie wytwarzając ciągu, silnik zaś będzie w
pozycji „cała naprzód”. W odpowiedniej chwili kąt natarcia łopatek
można zmienić i uzyskać natychmiastową reakcję, czyli poruszyć
statek w dowolnym kierunku, bez pozycji pośrednich. Ponieważ
pędniki VSP są napędzane przy stałej prędkości silnika (dzięki temu
nie traci się czasu na pokonanie bezwładności układu napędowego
oraz pełna moc jest dostępna natychmiast), nadmiar mocy można
poświęcić na napęd urządzeń dodatkowych, jak np. pomp armatek
wodnych, bez spadku mocy napędowej, przy jednoczesnym
wykorzystaniu ponad 70% mocy znamionowej silnika.
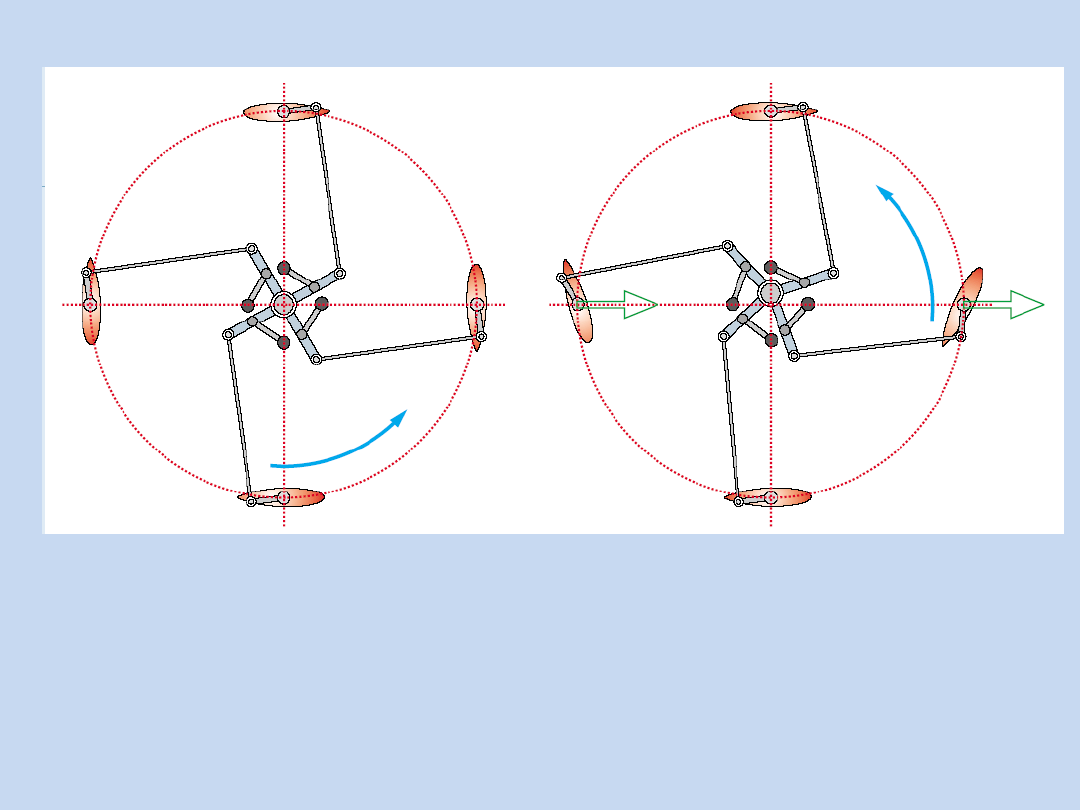
Przy takim ułożeniu łopatek
pędnik nie wytwarza ciągu
pomimo pracującego silnika.
W takiej konfiguracji
pędnik wytwarza ciąg w
prawo.
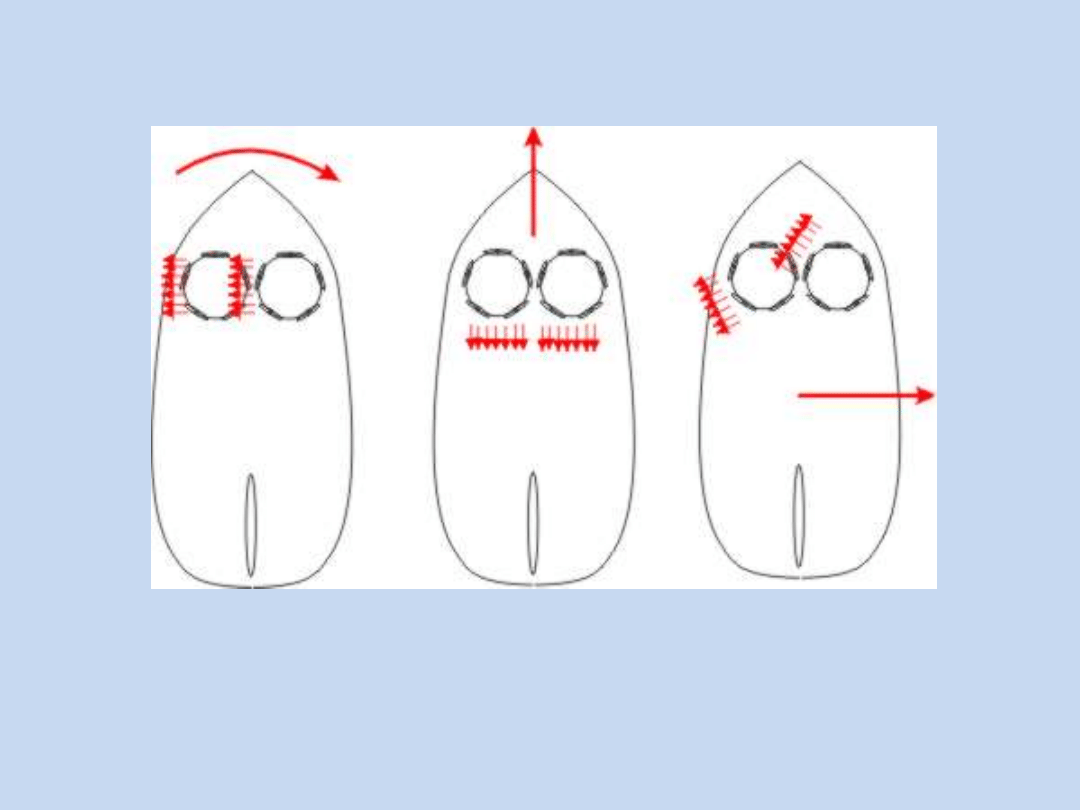
Obrót statku w
prawo, rufa stoi w
miejscu a obraca się
tylko dziób.
„Cała naprzód.”
Przesunięcie
całego kadłuba w
prawo.
Sterowanie holownikiem z pędnikami VSP odbywa się bezpośrednio,
co umożliwia zwrot po najmniejszym możliwym promieniu, czyli w
miejscu. Ruchy holownika są ściśle zsynchronizowane z poleceniami
ze stanowiska sterowania, a zmiany pozycji są bardzo szybkie i
precyzyjne. Zamocowane w pobliżu dziobu pędniki VSP likwidują
możliwość wywrotki, zawsze istniejącą przy holownikach z napędem
na rufie, gdyż tu
napęd ciągnie, zamiast pchać.
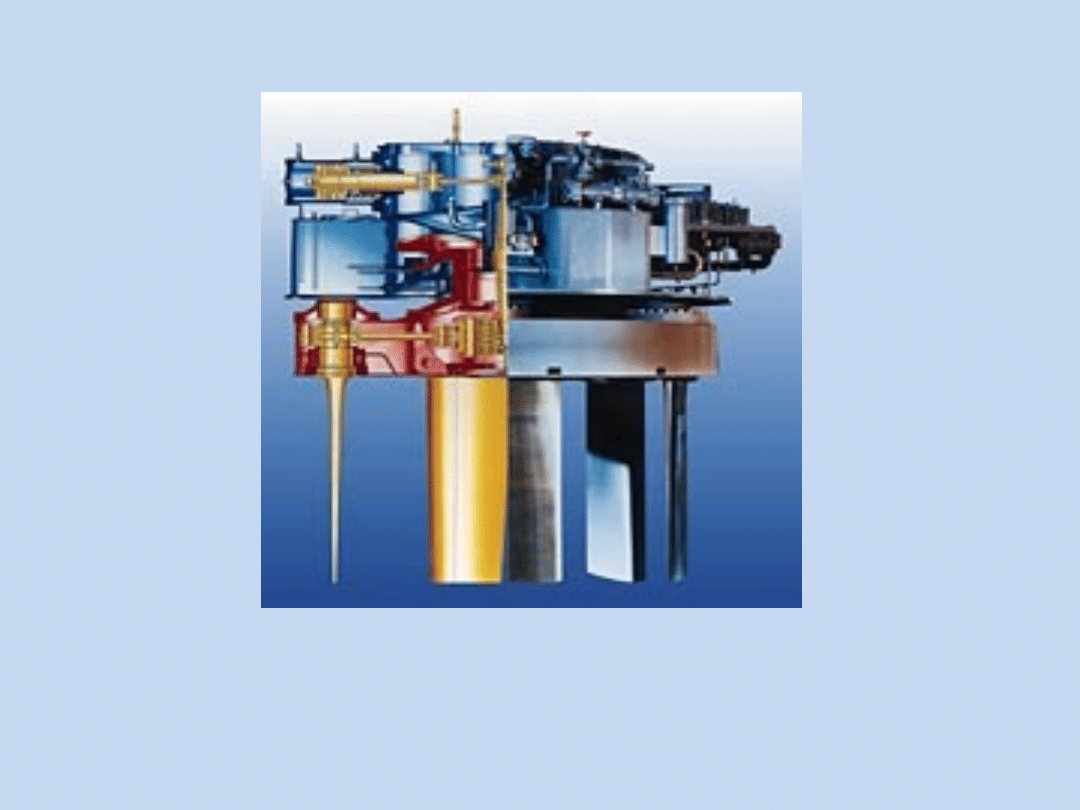
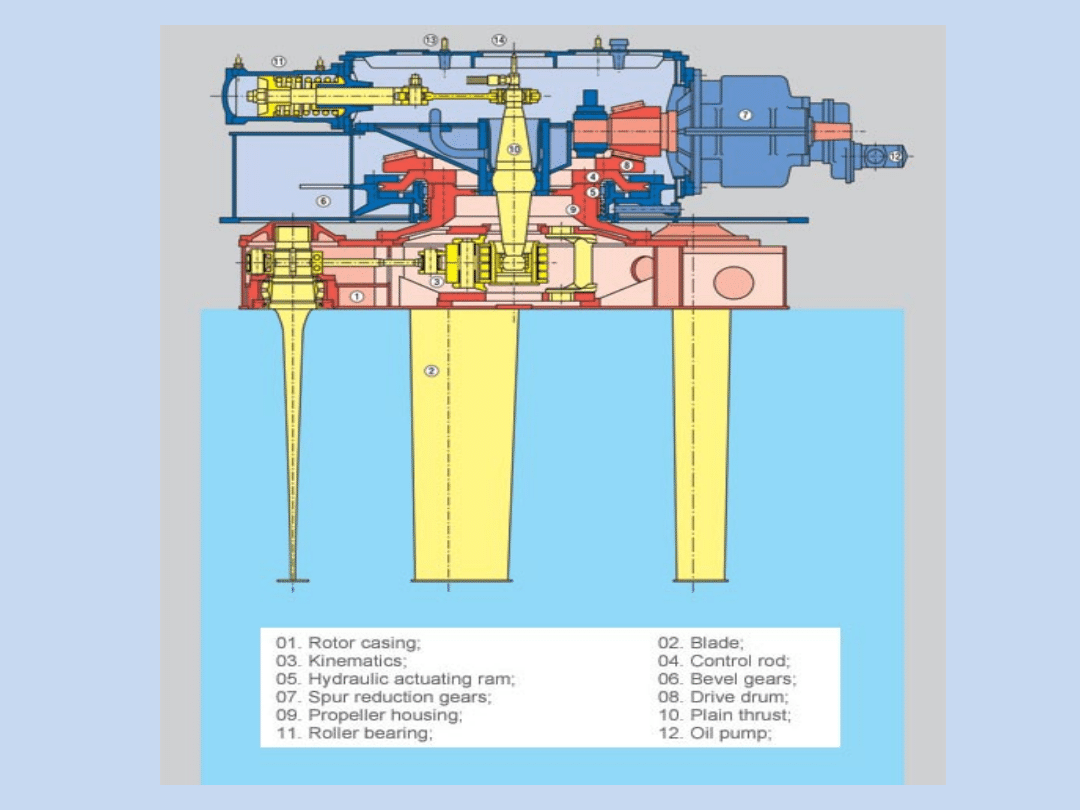
Wielkość i kierunek ciągu są sterowane za pomocą mechanicznego
systemu kinematycznego. W ustawianiu odpowiedniego kąta
natarcia bierze udział system
popychaczy przypominający tarczę sterującą wirnikiem śmigłowca.
Inżynierowie z firmy Voith- Schneider zdecydowali się nie korzystać
z elektroniki, gdyż pomimo
jej wszechobecnego zastosowania, bywa ona zawodna, szczególnie
w warunkach trudnego, a nawet brutalnego użytkowania na morzu,
w wilgoci i przy narażeniu na siły wykraczające poza przewidywania.
Pierwszy traktor wodny
Voitha powstał w 1954 r. Był
wyposażony w silnik o mocy
550 kW.
Obecne najmocniejsze
traktory wodne stosowane
do eskortowania tankowców
na Alasce - Nanuq i Tan’erliq
mają silniki o mocy 6 920
kW, czyli 13 razy większej.
Traktory wodne Voitha
prowadzą statki w Kanale
Panamskim, zastosowano je
po wypadku tankowca
Amoco Cadiz na wodach
francuskich, w Zatoce
Meksykańskiej, na wybrzeżu
Pacyfiku w okolicach Seattle
oraz przy kanadyjskiej,
odpornej na lód platformie
wiertniczej Hibernia. Obecnie
ponad 800 traktorów
wodnych Voitha pracuje w
ponad 120 portach świata.
Cechy charakterystyczne pędników Voith
Schneider Propeller:
bezstopniowe sterowanie naporem zarówno pod względem wielkości
jak i kierunku w
pełnym zakresie 360
o
siła ciągu jest zawsze generowana od wartości zerowej oraz zmiany
w jej kierunku
odbywają się zawsze poprzez zero
dzięki prawie idealnej obrotowej symetrii hydraulicznej, sprawność
pędnika jest taka
sama w całym zakresie 360
o
i dlatego moc silnika głównego może
być wykorzystana
maksymalnie natychmiast w dowolnym kierunku
kierunek siły ciągu zmienia się zgodnie z prostokątnym układem
współrzędnych X i Y
– osie te pokrywają się z głównymi osiami statku
silnik napędowy może pracować ze stałą lub zmienną prędkością
obrotową
optymalnie przystosowaną do warunków pracy i stałym kierunkiem
obrotów w czasie
wszystkich manewrów
prędkość obrotowa pędnika jest bardzo mała, co sprawia, że
konstrukcja jest
niezwykle solidna i wytrzymała, a to z kolei sprawia, że układ
napędowy działa
niezawodnie i pewnie nawet w ekstremalnie trudnych warunkach
układ napędowy i sterowanie stanowią jeden wspólny, inteligentny,
a zarazem prosty
w obsłudze system
dzięki możliwości usytuowania pędników VSP w części dziobowej
holownika
zmieniono rozkład sił działających na niego w czasie operacji
holowania, a tym
samym wyeliminowano niebezpieczeństwo wywrócenia do góry
dnem.
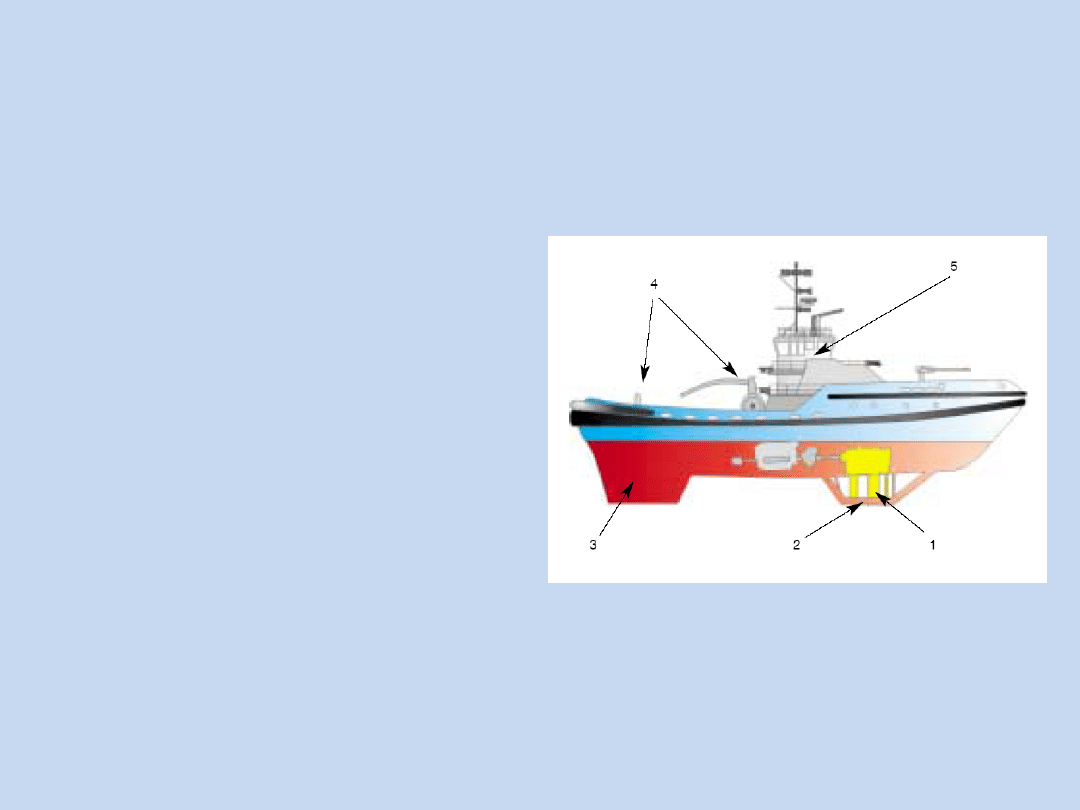
Rysunek prezentuje logiczne rozmieszczenie
podstawowych elementów holownika z
pędnikami VSP:
1. Pędnik VSP jest umieszczony w przedniej części kadłuba, co
zapewnia swobodny
przepływ we wszystkich kierunkach. Siły ciągu są wytwarzane przed
osią obrotu statku.
2. Pod pędnikami jest umieszczona
osłona, która wytwarza
efekt dyszy i zwiększa ciąg pędnika.
Chroni również łopatki pędnika
przed uderzeniami i chroni statek w doku.
3. Pod tylną częścią kadłuba znajduje
się miecz, wspomagający sterowanie,
hamowanie i zwiększający
opór poprzeczny, co umożliwia uzyskanie
dźwigni pomiędzy ciągiem pędników a punktem obrotu, a także
zapewnia
utrzymanie na kursie.
4. Elementy holujące znajdują się z tylu, poza środkiem obrotu statku.
5. Sterowanie odbywa się ze stanowiska kontrolnego w sterówce. W
zależności od
wielkości statku, można zainstalować kilka stanowisk kontrolnych.
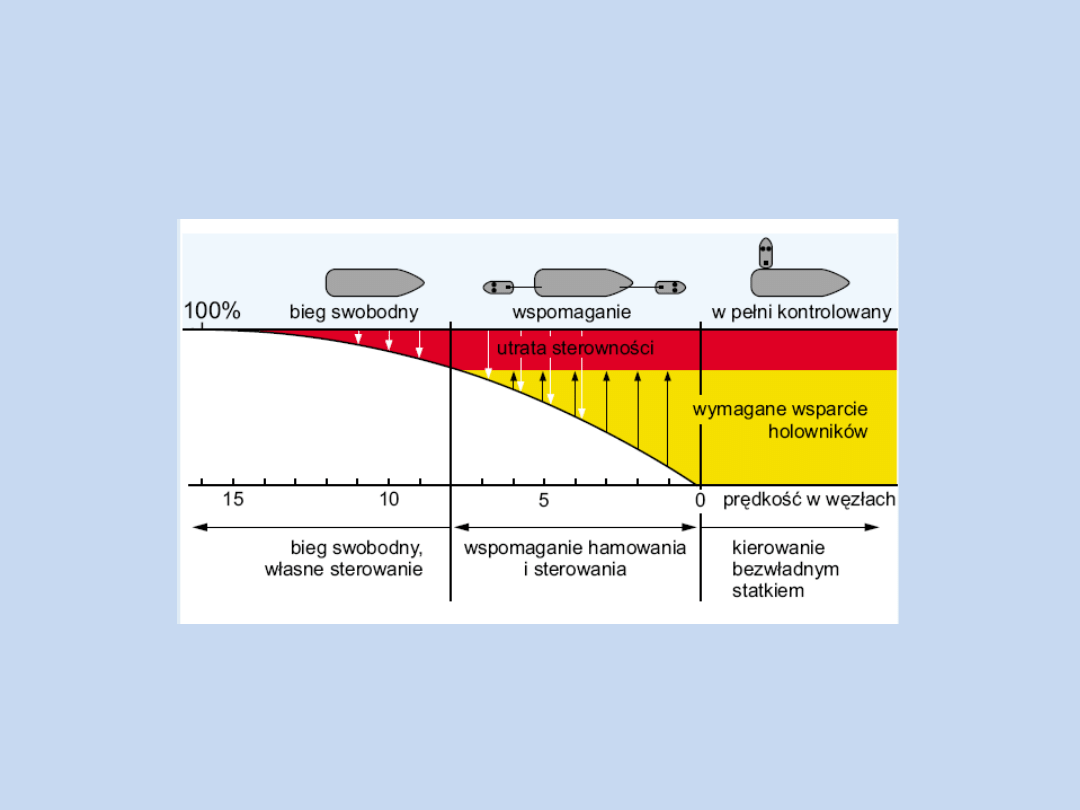
Im wolniej porusza się statek, tym bardziej wymaga
wsparcia holowników.
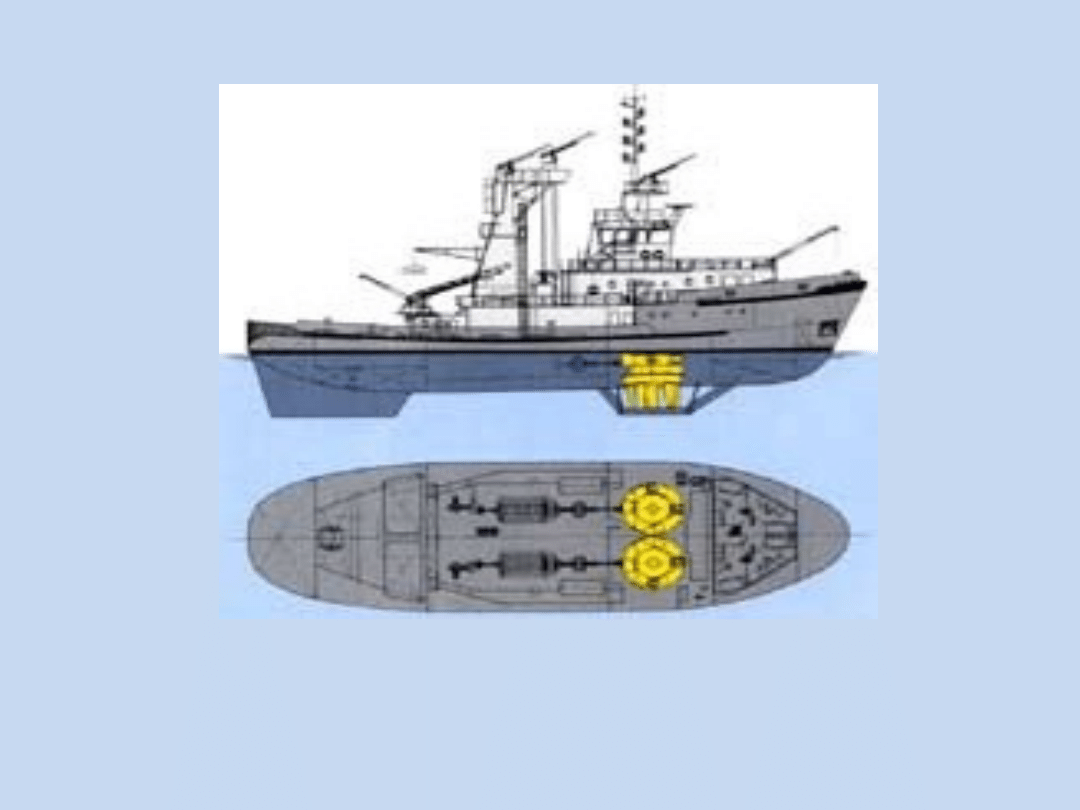
Rozmieszczenie pędników cykloidalnych w
holowniku typu Voith Water Tractor.
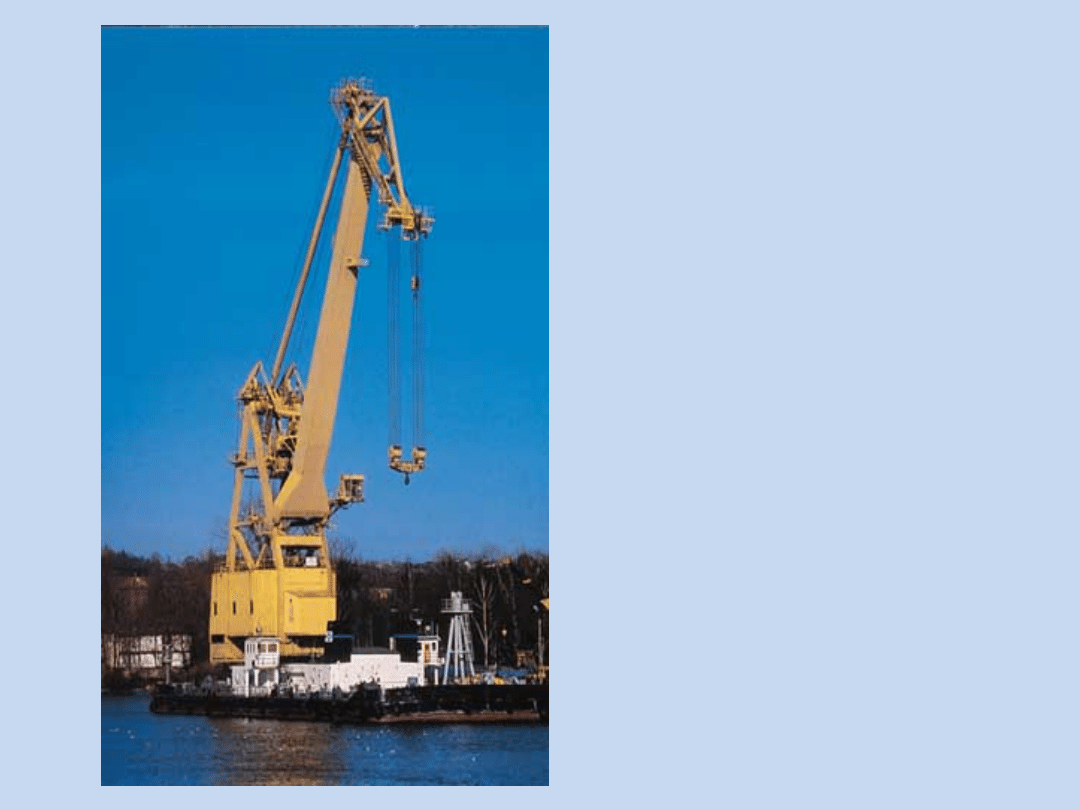
Żuraw pływający
zbudowany przez
Stocznię Szczecińską w
1991 r. Wyposażony w 2
pędniki Voith Schneider
napędzane silnikami
elektrycznymi o mocy
500 KW każdy.
Obecnie eksploatowany
przez Zakład Usług
Żeglugowych - Szczecin.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
Wyszukiwarka
Podobne podstrony:
3 Pędniki okrętowe ppt
krawiec,podstawy konstrucji maszyn II,zarys ewolwentowy i cykloidalny
Pednik Voitha Schneidera Nieznany
PędnikiRys, URZĄDZENIA KOTWICZNE
Cykloida, asteroida
pędnik idealnyi
pedniki
3 Pędniki okrętowe ppt
krawiec,podstawy konstrucji maszyn II,zarys ewolwentowy i cykloidalny
Pednik Voitha Schneidera Nieznany
Tribologia Trwałośc zazebienia obiegowej przekładni cykloidalnej
Brunvoll developes RDT PM thruster pędnik PMSG
PĘDNIKI OKRĘTOWE
Działanie śrub i siły działające na pędnik (
NOA Odyssey podwodne pędniki
więcej podobnych podstron