
Kinezjologia
Kinezjologia
Mgr Dorota Amanowicz
Mgr Dorota Amanowicz
ćwiczenia 2
ćwiczenia 2
- Ochrona stawu
Kostna, chrzęstna, więzadłowa,
mięśniowa
- Amortyzacja
- Chrząstka szklista
- Wspólnota „pracy i cierpienia”
Podstawowe zagadnienia
dotyczące funkcjonowania
narządu ruchu
Kinematyka połączeń stawowych
Ruchomość stawów
Inaczej zakres ruchu
Utworzona przez kąt między krańcowymi
położeniami członów połączonych stawem,
mierzy się w płaszczyźnie wokół osi
Zależy od podatności na odkształcenia
elementów stawu i siły działających mięśni
Poszczególne stawy różnią się zadaniami
biologicznymi, a więc mają odmienną budowę
i ruchomość.
Na wykonywanie ruchów we wszystkich płaszczyznach
pozwalają
stawy wieloosiowe
, np. kuliście uformowane
stawy barkowy oraz biodrowy.
Mniejszą ruchomość cechuje
stawy dwuosiowe
, np.
siodełkowo ukształtowana powierzchnia stawu nadgarstkowo-
śródręcznego kciuka pozwala na jego ruchy w dwóch
płaszczyznach.
Stawy jednoosiowe
umożliwiają ruch tylko w jednej
płaszczyźnie.
Przykładem może być zawiasowy staw ramienno-łokciowy czy
też obrotowy staw między najwyższymi kręgami kręgosłupa.
Kształt stawu zależy od jego czynności
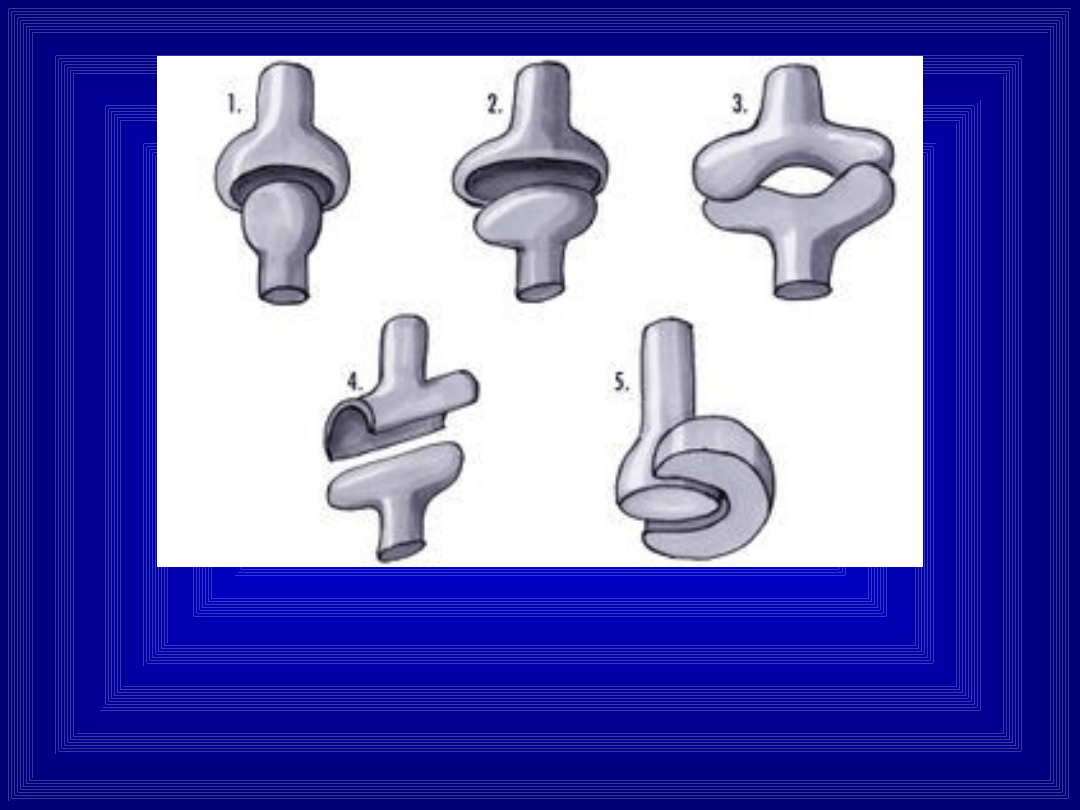
Rodzaje stawów: 1 - kulisty, 2 - eliptyczny,
3 - siodełkowaty, 4 - zawiasowy, 5 - obrotowy.
Rodzaje stawów
Rodzaje stawów
Kryterium podziału:
Kryterium podziału:
-
staw prosty - w budowie biorą udział tylko dwie kości.
staw prosty - w budowie biorą udział tylko dwie kości.
- staw złożony - w budowie bierze udział więcej niż dwie kości np.
- staw złożony - w budowie bierze udział więcej niż dwie kości np.
staw
staw
łokciowy
łokciowy
Stawy nieregularne
Stawy nieregularne
- staw płaski - staw krzyżowo-biodrowy
- staw płaski - staw krzyżowo-biodrowy
- staw mostkowo-obojczykowy chociaż ma on
- staw mostkowo-obojczykowy chociaż ma on
raczej charakter stawu kulistego
raczej charakter stawu kulistego
Stabilność stawu
Jakie elementy o tym
decydują?
Rodzaj i zakres ruchu
Dlaczego ruch w stawie jest
ważny ?
Ustawienie czynnościowe
Ustawienie czynnościowe
Ręka – ustawienie pisarskie
Ręka – ustawienie pisarskie
Przedramię – pośrednie
Przedramię – pośrednie
Łokieć – w półzgięciu
Łokieć – w półzgięciu
Staw ramienny – zgięcie ok. 45 st,
Staw ramienny – zgięcie ok. 45 st,
rotacja zew ok. 20 st.
rotacja zew ok. 20 st.
Stopa – końskie ok. 5 st (kobiety na
Stopa – końskie ok. 5 st (kobiety na
obcasach więcej)
obcasach więcej)
Kolano – zgięcie ok. 10-15 st.
Kolano – zgięcie ok. 10-15 st.
Biodro – zgięcie ok. 30 st.,
Biodro – zgięcie ok. 30 st.,
fizjologiczne przywiedzenie i rotacji
fizjologiczne przywiedzenie i rotacji
pośredniej
pośredniej
Zakres czynny to taki, jaki uzyskamy
Zakres czynny to taki, jaki uzyskamy
aktywizując momenty sił mięsni
aktywizując momenty sił mięsni
działających na np. staw łokciowy.
działających na np. staw łokciowy.
Zakres bierny uzyskuje się przy
Zakres bierny uzyskuje się przy
wykorzystaniu momentów sił zewnętrznych,
wykorzystaniu momentów sił zewnętrznych,
przy czym mięśnie zachowują się biernie i
przy czym mięśnie zachowują się biernie i
nie ograniczają ruchomości.
nie ograniczają ruchomości.
Zakres czynny - miernik skuteczności
Zakres czynny - miernik skuteczności
terapii i ocena stanu czynnościowego
terapii i ocena stanu czynnościowego
stawu
stawu
Czynnikami ograniczającymi w zakres
Czynnikami ograniczającymi w zakres
ruchów w stawach są: chrząstki, torebki
ruchów w stawach są: chrząstki, torebki
stawowe, więzadła i mięśnie. Poza tym
stawowe, więzadła i mięśnie. Poza tym
możemy jeszcze wyróżnić stany
możemy jeszcze wyróżnić stany
chorobowe stawów i mięśni (RZS, ZZSK)
chorobowe stawów i mięśni (RZS, ZZSK)
oraz wiek.
oraz wiek.
Struktura szkieletu -
Struktura szkieletu -
w biomechanice
w biomechanice
Kości – sztywne człony
Kości – sztywne człony
Stawy – łączą człony – w sposób
Stawy – łączą człony – w sposób
ruchomy tworzą pary
ruchomy tworzą pary
biokinematyczne
biokinematyczne
Ruchy zachodzące w stawach mogą
Ruchy zachodzące w stawach mogą
odbywać się w trzech płaszczyznach:
odbywać się w trzech płaszczyznach:
-
strzałkowej
strzałkowej
-
czołowej
czołowej
-
poprzecznej
poprzecznej
Niezależny ruch w stawie - stopień
Niezależny ruch w stawie - stopień
swobody ruchu
swobody ruchu
Stopień swobody ruchu określa w ilu
Stopień swobody ruchu określa w ilu
płaszczyznach zachodzą ruchy w stawie.
płaszczyznach zachodzą ruchy w stawie.
Stopień swobody ruchu – to ruchliwość
Stopień swobody ruchu – to ruchliwość
członu pary biokinematycznej.
członu pary biokinematycznej.
Aby ciało było swobodne, wolne od więzów
Aby ciało było swobodne, wolne od więzów
musi poruszać się w trzech ruchach
musi poruszać się w trzech ruchach
postępowych i trzech obrotowych.
postępowych i trzech obrotowych.
Para biokinematyczna może posiadać nie
więcej niż 5 stopni swobody
Wzór:
Wzór:
H=6 – s
H=6 – s
H
H
– stopień swobody
– stopień swobody
S
S
– liczba więzów (miejsc w
– liczba więzów (miejsc w
których ruch nie występuje)
których ruch nie występuje)
Gdy
Gdy
H=6
H=6
staw swobodny
staw swobodny
H=0
H=0
staw nieruchomy
staw nieruchomy
Np.
Np.
st. Ramienny - 3
st. Ramienny - 3
° swobody ruchu
° swobody ruchu
st
st
. Promieniowo-łokciowy - 1° swobody
. Promieniowo-łokciowy - 1° swobody
ruchu
ruchu
st
st
. Biodrowy - 3° swobody ruchu
. Biodrowy - 3° swobody ruchu
st
st
. Kolanowy - 2° swobody ruchu
. Kolanowy - 2° swobody ruchu
Klasy par biokinematycznych w narządzie
Klasy par biokinematycznych w narządzie
ruchu człowieka i ich związek ze stopniami
ruchu człowieka i ich związek ze stopniami
swobody ruchu
swobody ruchu
U człowieka występują III, IV i V klasa par
U człowieka występują III, IV i V klasa par
biokinematycznych stawu (dlaczego?)
biokinematycznych stawu (dlaczego?)
Im wyższa klasa ruchu tym mniejszy stopień
Im wyższa klasa ruchu tym mniejszy stopień
swobody.
swobody.
Łańcuch biokinematyczny
Łańcuch biokinematyczny
Łańcuch kostno stawowy wraz z
Łańcuch kostno stawowy wraz z
obudowującym go zespołem
obudowującym go zespołem
wielomięśniowym.
wielomięśniowym.
Spójny zespół członów połączonych w
Spójny zespół członów połączonych w
pary biokinematyczne
pary biokinematyczne
Rozróżnia się łańcuchy:
Rozróżnia się łańcuchy:
-
otwarte
otwarte
-
zamknięte
zamknięte
Łańcuch kinematyczny jest
Łańcuch kinematyczny jest
otwarty
otwarty
wówczas gdy jego koniec dystalny jest
wówczas gdy jego koniec dystalny jest
wolny.
wolny.
Np.
Np.
-
Machanie ręką na pożegnanie
Machanie ręką na pożegnanie
-
Rzut oszczepem, szermierka (praca ręki)
Rzut oszczepem, szermierka (praca ręki)
Łańcuch kinematyczny zamknięty
Łańcuch kinematyczny zamknięty
wówczas gdy dystalne odcinki łańcuchów
wówczas gdy dystalne odcinki łańcuchów
(najczęściej) kończynowych połączą się
(najczęściej) kończynowych połączą się
ze sobą bezpośrednio, albo za
ze sobą bezpośrednio, albo za
pośrednictwem podłoża lub trzymanego
pośrednictwem podłoża lub trzymanego
przedmiotu.
przedmiotu.
Rodzaje:
Rodzaje:
-
Względny – opór do pokonania
Względny – opór do pokonania
-
Bezwzględny – opór nie do pokonania
Bezwzględny – opór nie do pokonania
Typy ruchu stawowego
• Ślizgowy (powierzchniowy, liniowy) –
punkt powierzchni stawowej styka się
z coraz innymi punktami drugiej pow.
• Toczenia się – nowe punkty
sukcesywnie się stykają
• Rotacji osiowej
• Człowiek żyje w środowisku gdzie jest
poddawany działaniom sił
• Wywołują ruch lub ruchowi
zapobiegają –popychanie lub
pociąganie
• Zewnętrzne i wewnętrzne
• Czynne i bierne
• Zewnętrzne – grawitacja, partner,
wiatr, woda,tarcie, reakcje podłoża
• Wewnętrzne – siły wytwarzane przez
mięśnie, opór tkanek biernych,
bezwładność
• Czynne – pobudzony mm, grawitacja,
partner, woda, wiatr
• Bierne – reakcje podłoża, tarcie, opór
wody, wiatru, tkanek biernych,
bezwładność, siły bierne mięśni
• Budowa narządu ruchu (kości, stawów i
mięśni) zmierza do zachowania optymalnej
sytuacji pomiędzy układem sił zewnętrznych i
wewnętrznych
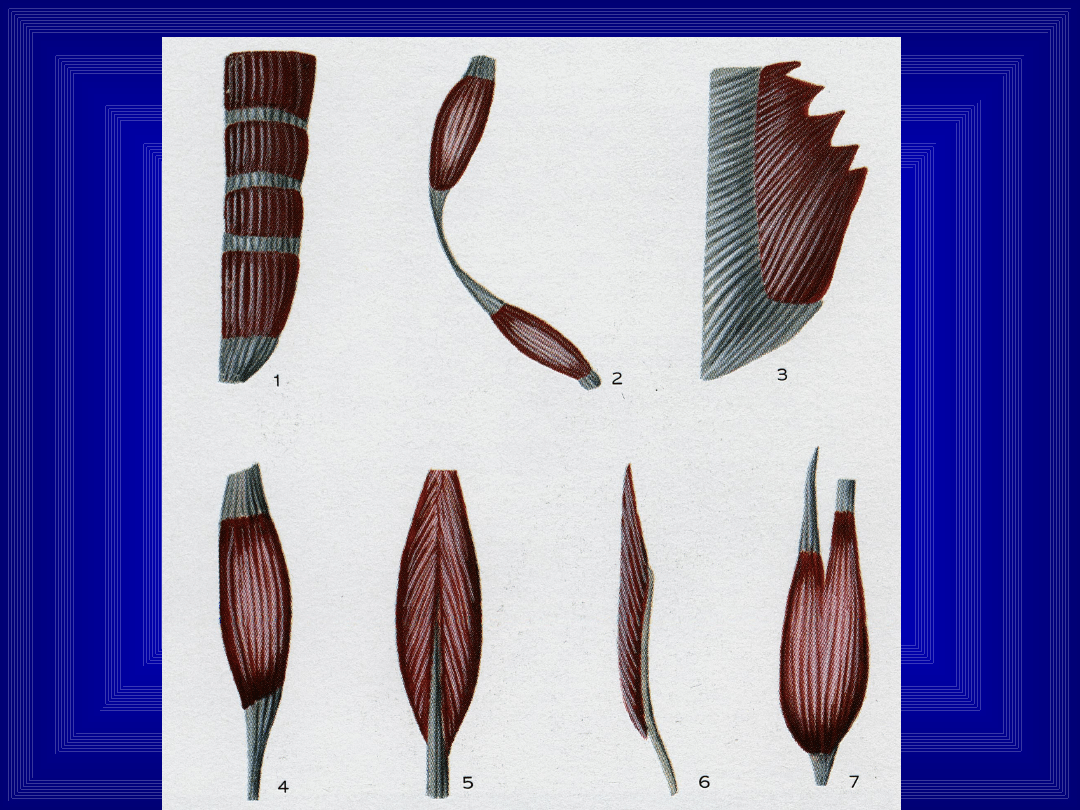
• Mięśnie – źródłem siły
• Siła mięśnia proporcjonalna do przekroju
fizjologicznego - powierzchnia przecięcia
brzuśca w jego najgrubszym miejscu
(płaszczyzna cięcia prostopadła do przebiegu
włókien)
• W układzie par biokinematycznych
pomiar siły sprowadza się do pomiaru
momentów sił mięśni i oporu na
zasadzie ich równoważenia
• Siła mięśnia z kością (człon podparty
w punkcie obrotu) i siła zewnętrzna
tworzy dźwignę
• Praca mięśni na zasadzie dźwigni
powoduje dwojakie zużytkowanie
ich siły - część na zmianę położenia
belek kostnych, druga na ochronę
stawu
• W narządzie ruchu punkt podparcia dźwigni
leży na osi obrotu w stawie
• R – wielkość wektorowa siły oporu (ciężkości,
bezwładności) kończyny lub ciała
• F – wielkość wektorowa siły mięśniowej
• rR – ramię siły oporu to odległość od osi
obrotu do kierunku działania siły mierzona
wzdłuż prostej prostopadłej do kierunku siły R
• rF – ramię siły mięśniowej to odległość między
osią obrotu w stawie a kierunkiem działania
siły mięśnia
Moment siły mięśniowej – iloczyn siły
oznaczającej wartość składowej obrotowej i jej
odległości od osi obrotu w stawie.
M = F x rF
Dla utrzymania dźwigni w równowadze
momenty sił muszą być sobie równe
MF = MR czyli
F x rF = R x rR
Rodzaje dźwigni:
Rodzaje dźwigni:
Dźwignia dwustronna – punkt podparcia znajduje
się pomiędzy punktem przyłożenia siły
mięśniowej a punktem przyłożenia siły oporu
* dźw. równoramienna (moment siły mięśni
= moment siły oporu)
* dźw. szybkościowa (siłowa) (ramię siły
mięśni < ramię siły oporu)
* dźw. oszczędnościowa (ramię siły mięśni >
ramię siły oporu)
Dźwignia jednostronna - oba ramiona sił
leżą po tej samej stronie punktu podparcia
* dźw. równoramienne
* dźw. szybkościowe (siłowe)
* dźw. oszczędnościowe
• Mięśnie, których przyczepy znajdują
się w bezpośrednim otoczeniu stawu,
na który działają, biorą udział w
tworzeniu dźwigni siłowych.
• W skład dźwigni oszczędnościowych
wchodzą te mięśnie, których
przyczepy są w znacznej odległości
od poruszanego stawu a kąty
natarcia mogą być dodatkowo
powiększone przez hypomochliony
W przykładach dźwigni ramię siły jest
prostopadłe do kierunku jej działania
W narządzie ruchu mięśnie przyczepiają
się do kości pod kątem – kąt natarcia
mięśniowego (kąty ścięgnowo-kostne) o
wartościach od 0º do 90º
Wielkość kąta ma znaczenie – przy
wartościach 0º cała siła mięśnia
skierowana na zwieranie stawu bez
zmiany położenia belek kostnych
0º-45º – składowa stawowa większa od
obrotowej
Równe 45º – obie składowe sobie równe
45º składowa obrotowa odpowiednio
większa od stawowej
Równe 90º – składowa stawowa = 0 a cała siła
mięśnia skierowana na wykonanie obrotu w
stawie (niekorzystne dla aparatu stawowego
– działają rozciągające siły zewnętrzne)
• W narządzie ruchu przeważają niewielkie
kąty natarcia
• Jednak w stawach: ramiennym, łokciowym,
biodrowym i kolanowym kąty większe i
mogą ulegać wahaniom podczas ruchów
zwiększając siłę momentów mięśniowych
• Istotnym również czynnikiem zmieniającym
moment siły jest zmiana wielkości
całkowitej mięśnia zależna od stanu i
stopnia napięcia mięśniowego, który zależy
od układu nerwowego
• Z kolei zmienność momentów sił
oporu zależy od położenia
poruszanej części ciała
• Przy zwisającej kończynie moment
siły ciężkości = 0
• Największe wartości w poziomym
położeniu kończyny
Praca mięśni
Statyczna
Dynamiczna
Trzy formy działania mięśni:
Trzy formy działania mięśni:
• Koncentryczne – moment siły
mięśniowej jest większy od momentu siły
oporu, mięsień lub zespół wykonuje swoją
nominalną funkcje (zginacz – zgina,
prostownik – prostuje, odwodziciel-
odwodzi)
• Stabilizujące – moment siły mięśniowej
jest równy momentowi siły oporu, nie
dochodzi do zmian kątowych w stawach
• Ekscentryczne – moment siły mięśniowej
jest mniejszy od momentu siły oporu, ruch
jest zgodny z kierunkiem działania siły
oporu
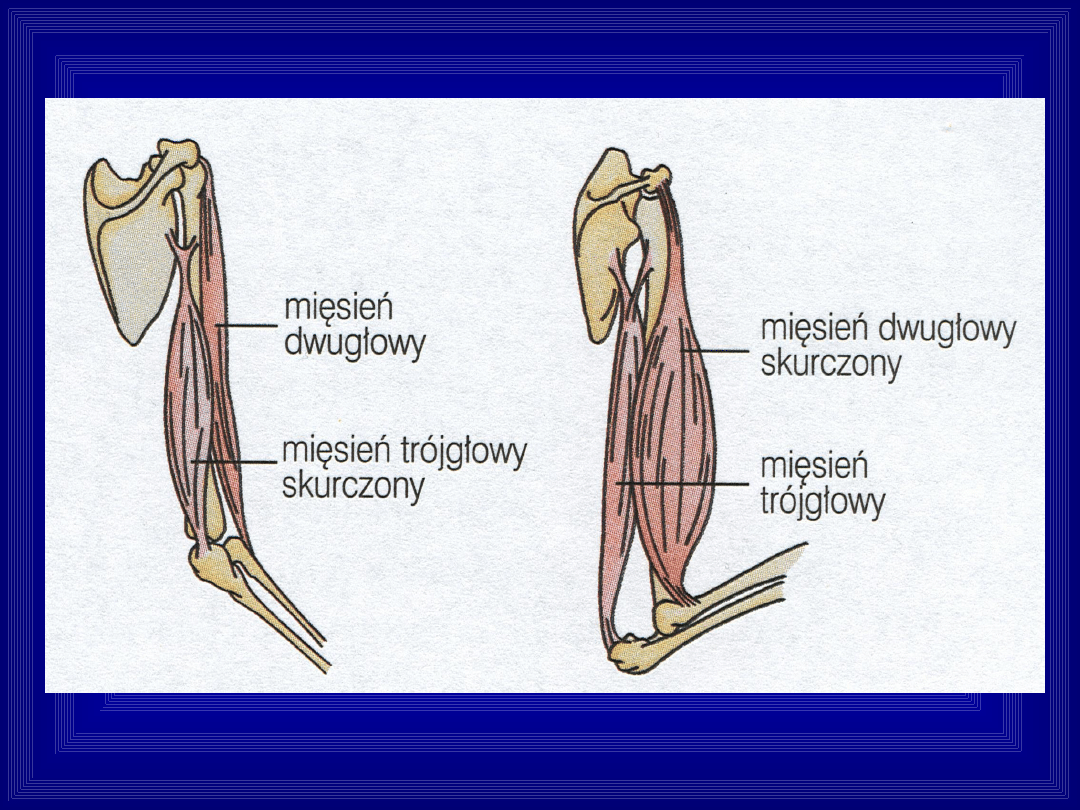
Formy współdziałania mięśni
Formy współdziałania mięśni
Agonistyczne – mięśnie, które
współdziałają ze sobą, wykonują ruch
Antagonistyczne – jest to odwrotne,
przeciwne działanie mięśni,
Synergistyczne – mięśnie, których
działanie jest od siebie zależne,
zapobiegają powstawaniu ruchów
przypadkowych
Stabilizujące- utrzymuje części w położeniu
umożliwiającym ruch w stawie (posturalne
– ze zmianą środka ciężkości)
Taśmy mięśniowe – mięśnie
wielostawowe, biorące udział w
ruchach złożonych. Wpływają na
lepszą koordynację i płynność
wykonywanych ruchów.
Np. m. czworoboczny i m.
równoległoboczny/ m. piersiowy
mniejszy tworzą taką taśmę.
Hypomochliony
Hypomochliony
Hypo-pod, mochlos - dźwignia
Hypomochliony
Hypomochliony
stałe
stałe
– elementy
– elementy
w
w
układzie
układzie
kostno-stawowym, które
kostno-stawowym, które
powodują zwiększenie kąta natarcia,
powodują zwiększenie kąta natarcia,
poprzez oddalenie mięśnia (lub jego
poprzez oddalenie mięśnia (lub jego
ścięgna) od osi ruchu w stawie, na który
ścięgna) od osi ruchu w stawie, na który
mięsień ten
mięsień ten
działa.
działa.
Przykłady:
Przykłady:
-
rzepka stawu kolanowego
rzepka stawu kolanowego
-
trzeszczki w stawie śródręczno-
trzeszczki w stawie śródręczno-
paliczkowym
paliczkowym
-
wyrostki kolczyste i poprzeczne kręgów
wyrostki kolczyste i poprzeczne kręgów
-
rozchylone na boki talerze biodrowe
rozchylone na boki talerze biodrowe
-
bloczki mięśni
bloczki mięśni
Hypomochliony warunkowe –
występują w stawach, w których
wypukła powierzchnia stawowa jest
znacznie obszerniejsza od
kontaktującej się z nią powierzchni
wklęsłej (st. łokciowy, st.
śródręczno-palcowe – czasem
stałe).
W położeniu wyprostnym wypukła
część powierzchni stawowej po
stronie zginania pełni rolę
hypomochlionu.
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
Wyszukiwarka
Podobne podstrony:
cwiczenia 1 kinezjologia
ćwiczenia kinezjologiczne, Ćwiczenia, Ćwiczenia - ukierunkowane
Ćwiczenia kinezjologiczne, Materiały naukowe z różnych dziedzin, Kinezyterapia
JAK WYKORZYSTUJĘ ĆWICZENIA KINEZJOLOGII, JAK WYKORZYSTUJĘ ĆWICZENIA KINEZJOLOGII
biomechanika, STUDIA, I semestr, Kinezjologia ćwiczenia, Kinezjologia, CW, INNE
Ćwiczenia kinezjologiczne, Ćwiczenia kinezjologiczne, ich opis i wpływ na organizm człowieka
JAK WYKORZYSTAĆ ĆWICZENIA KINEZJOLOGII?UKACYJNEJ NA ZAJECIACH
cwiczenia 3 kinezjologia
cwiczenia 1 kinezjologia
Manual, Fizjoterapia, fizjoterapia I rok, KINEZJOLOGIA, ćwiczenia
ĆWICZENIA przekraczające linię środkową KINEZJOLOGIA wg Dennisona, kinezjologia
Kinezjologia cwiczenie 4, AWF Katowice(materiały studenckie), III rok VI semestr, Kinezjologia
RĘKA REUMATOIDALNA (1), Fizjoterapia, fizjoterapia I rok, KINEZJOLOGIA, ćwiczenia
cwiczenia z zakresu Kinezjologii edukacyjnej Dennisona 2, Fizjoterapia, . fizjoterapia
Przeciwwskazania ortopedyczne do uprawiania sportu i cwiczen fizycznych, Fizjoterapia, fizjoterapia
więcej podobnych podstron