
MECHANIKA RUCHU
MECHANIKA RUCHU
KRZYWOLINIOWEGO
KRZYWOLINIOWEGO
Andrzej Reński
Andrzej Reński
Politechnika Warszawska
Politechnika Warszawska
Instytut Pojazdów
Instytut Pojazdów
Warszawa 2007
Warszawa 2007
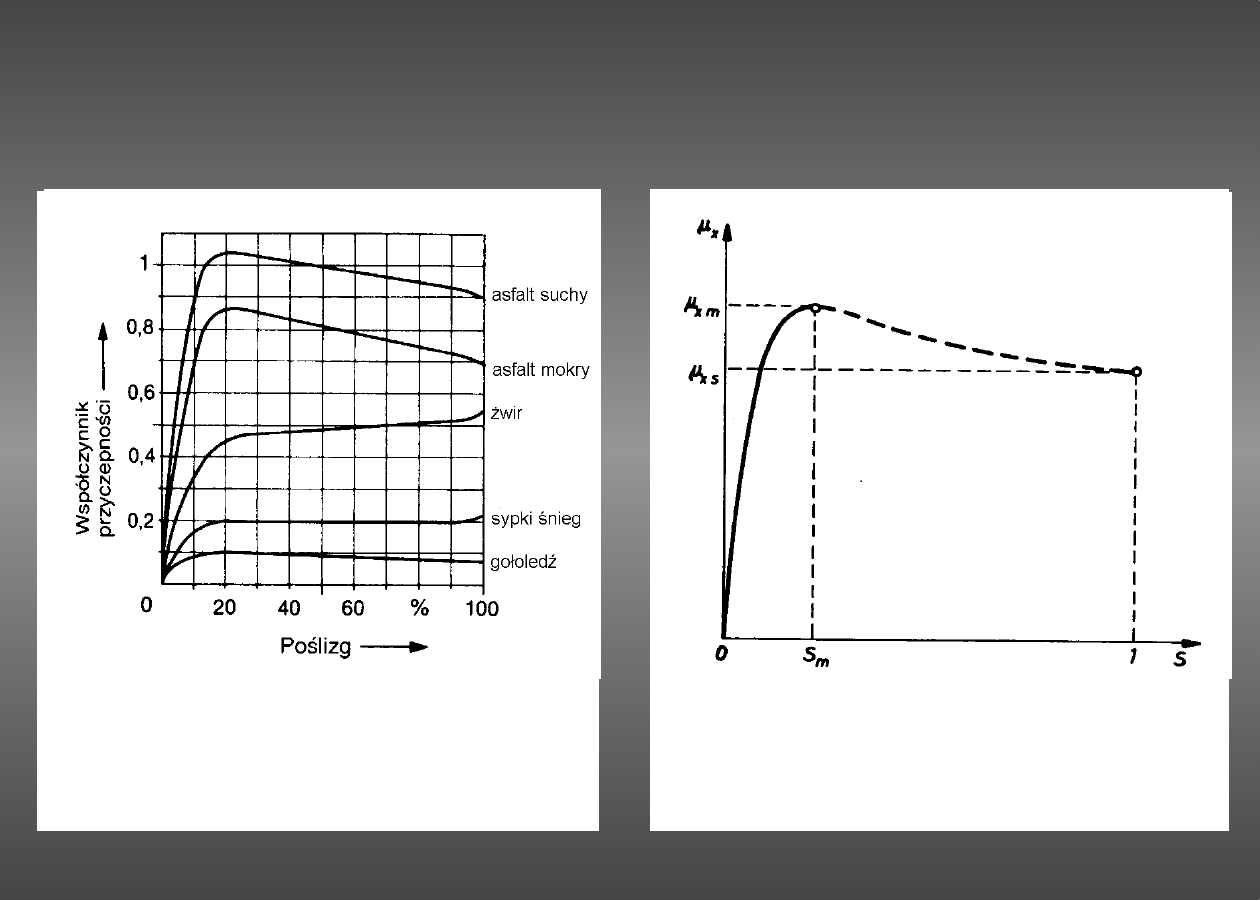
Współpraca opony z nawierzchnią
Współpraca opony z nawierzchnią
Współczynnik
przyczepności w
funkcji poślizgu
Współczynnik przyczepności
przylgowej i poślizgowej
Przyczepność wzdłużna
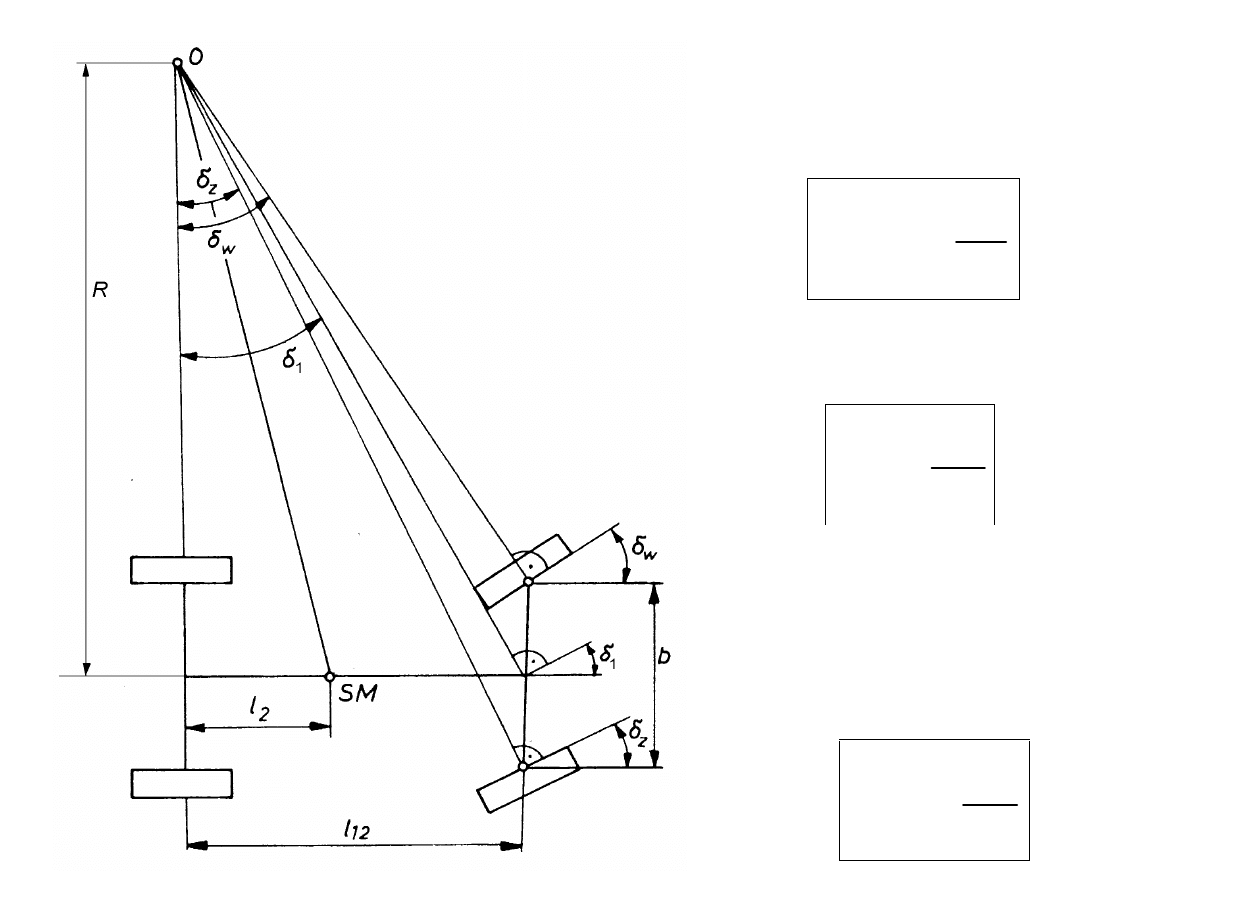
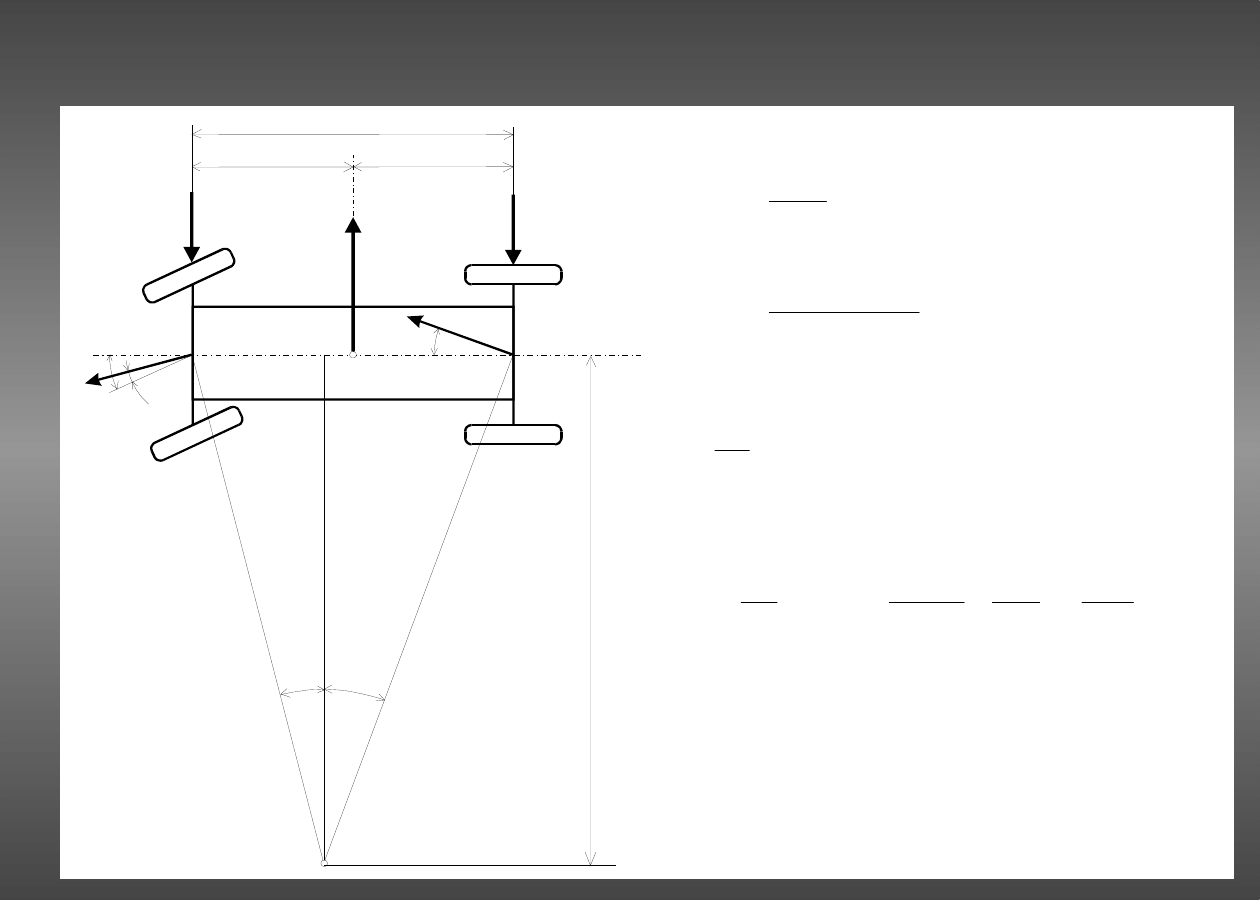
ZALEŻNOŚCI
GEOMETRYCZNE
R
l
tg
12
1
Dla małych kątów
1
:
R
l
12
1
Teoretyczny kąt
skrętu kół
kierowanych - kąt
Ackermana δ
A
:
R
l
12
A
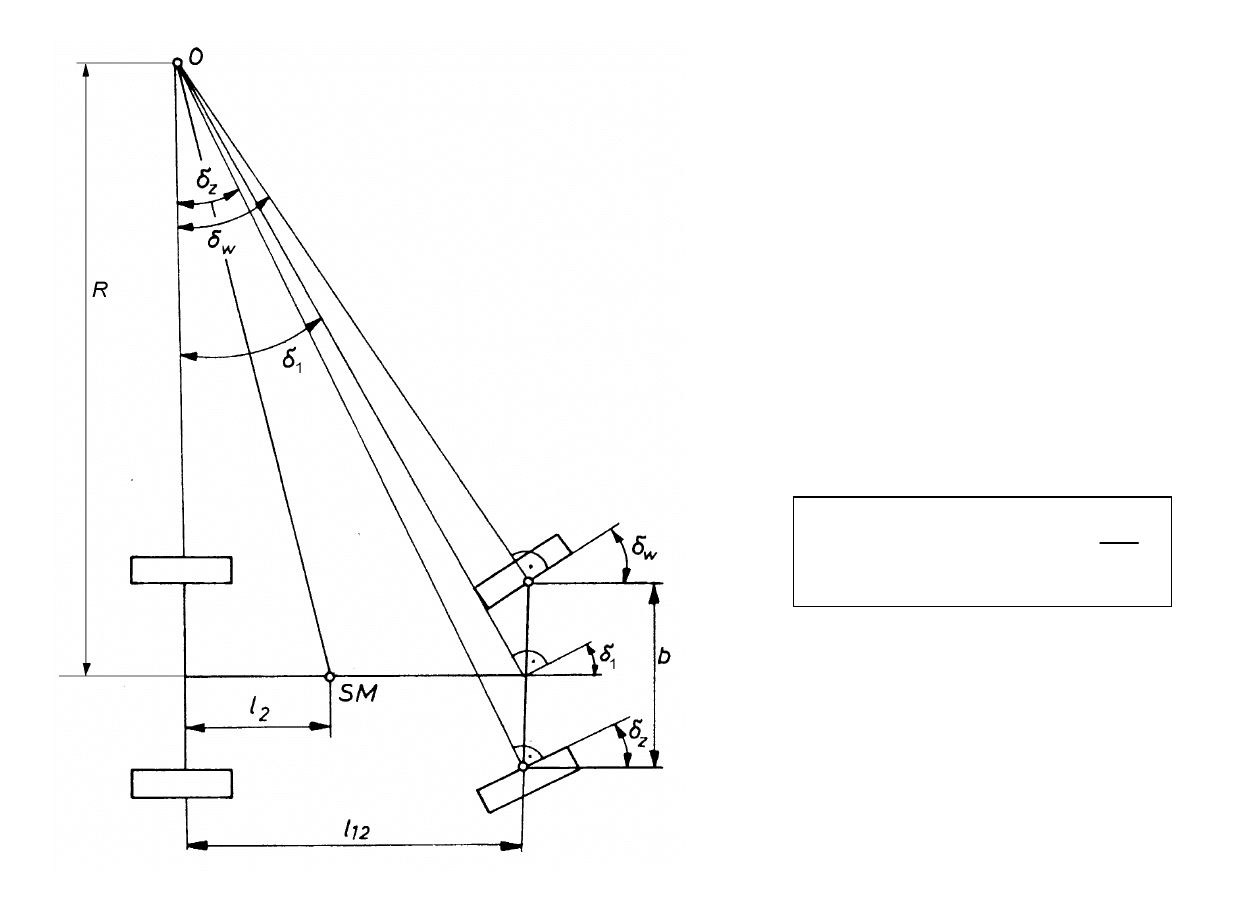
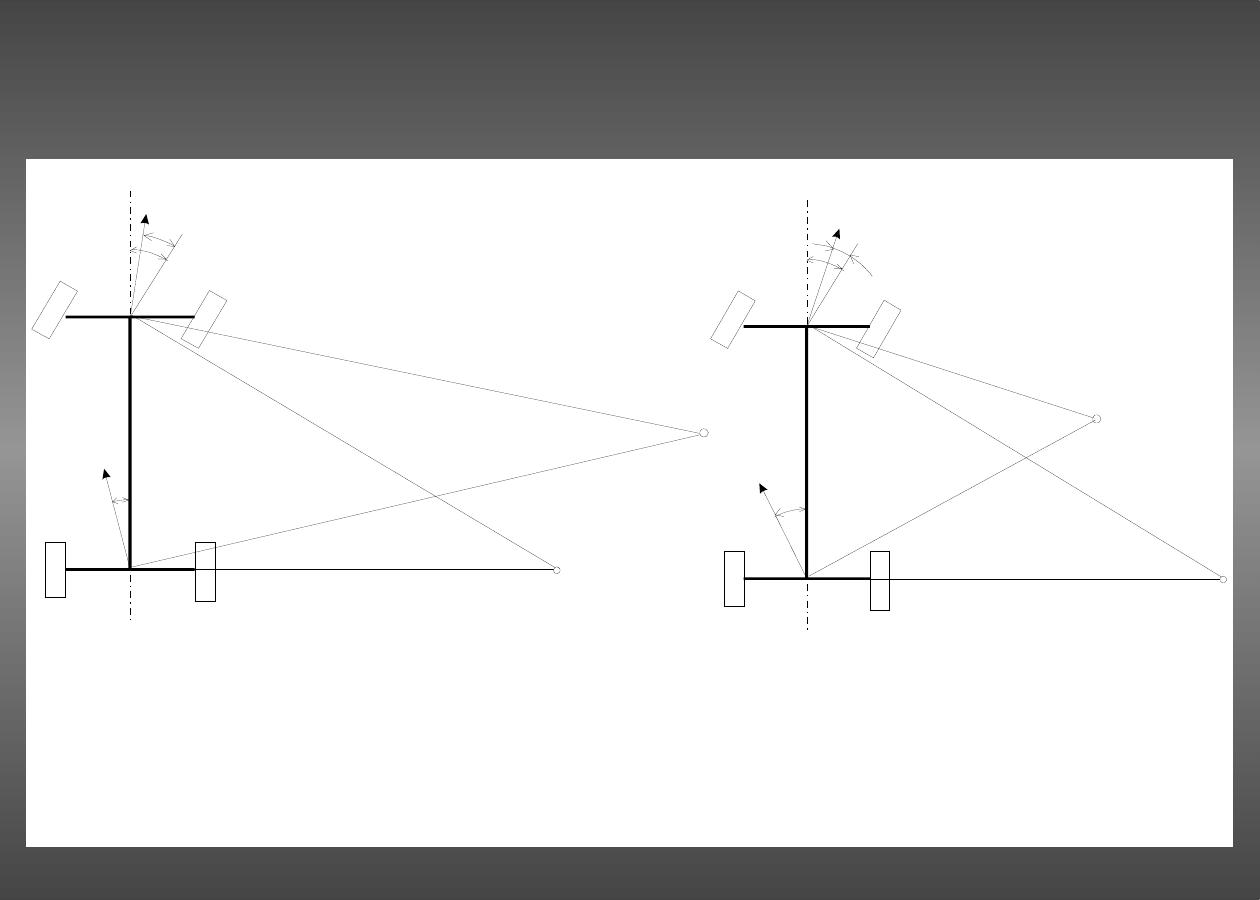
ZALEŻNOŚCI
GEOMETRYCZNE
Zależnośc pomiędzy
kątem skrętu koła
wewnętrznego
w
i
zewnętrznego
z
:
12
w
z
l
b
ctg
ctg
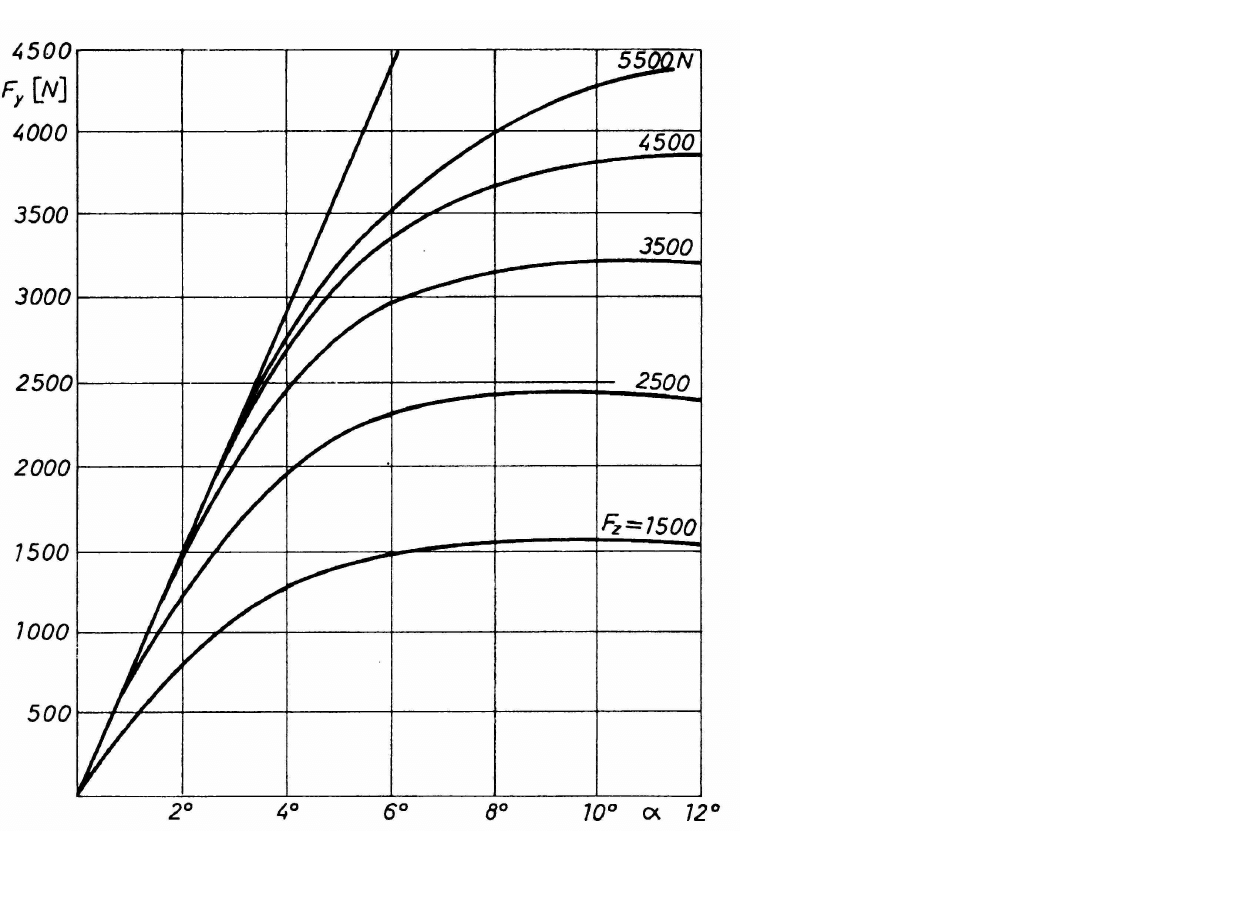
CHARAKTERYSTYKI
OPON
(
opona
175HR14
)
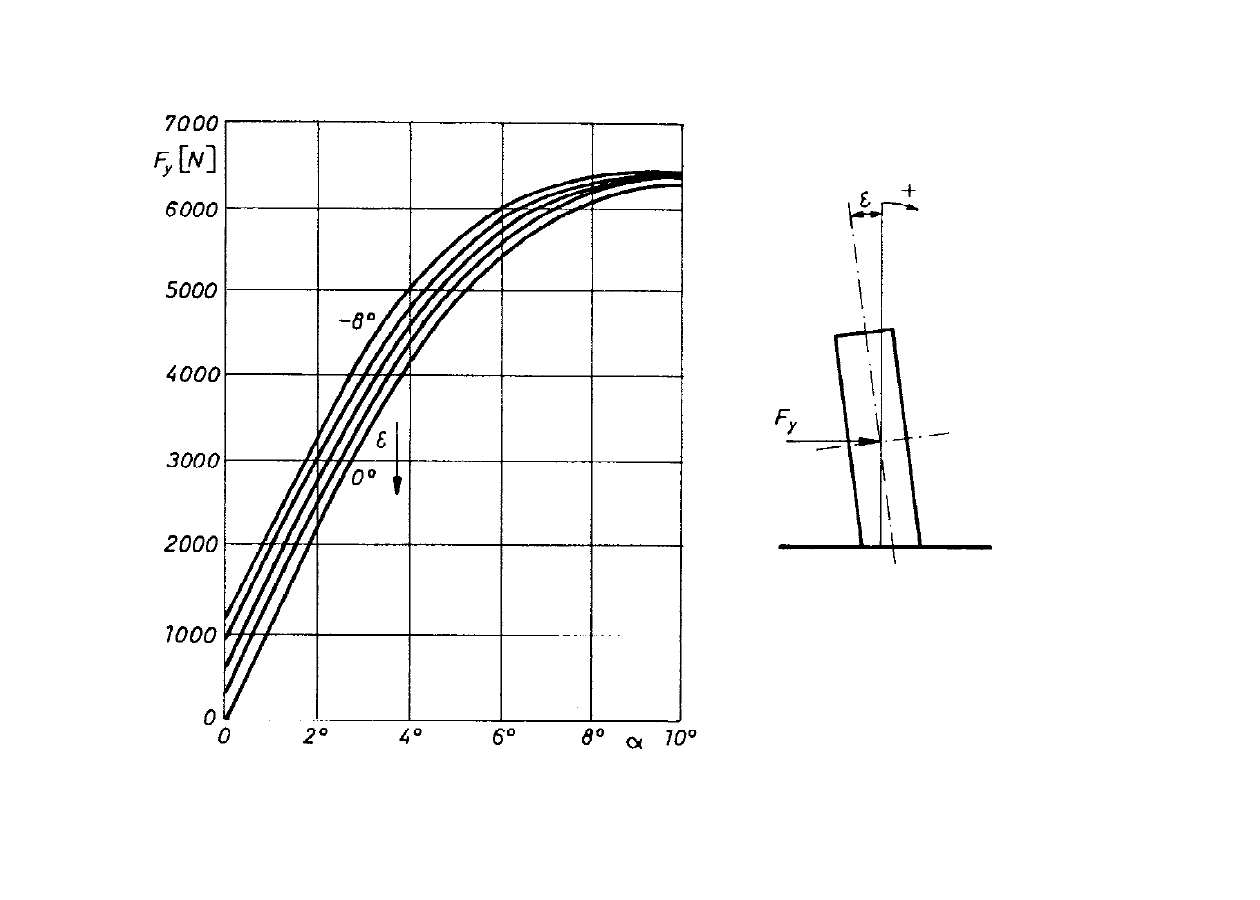
CHARAKTERYSTYKI OPON
Wpływ kąta pochylenia koła
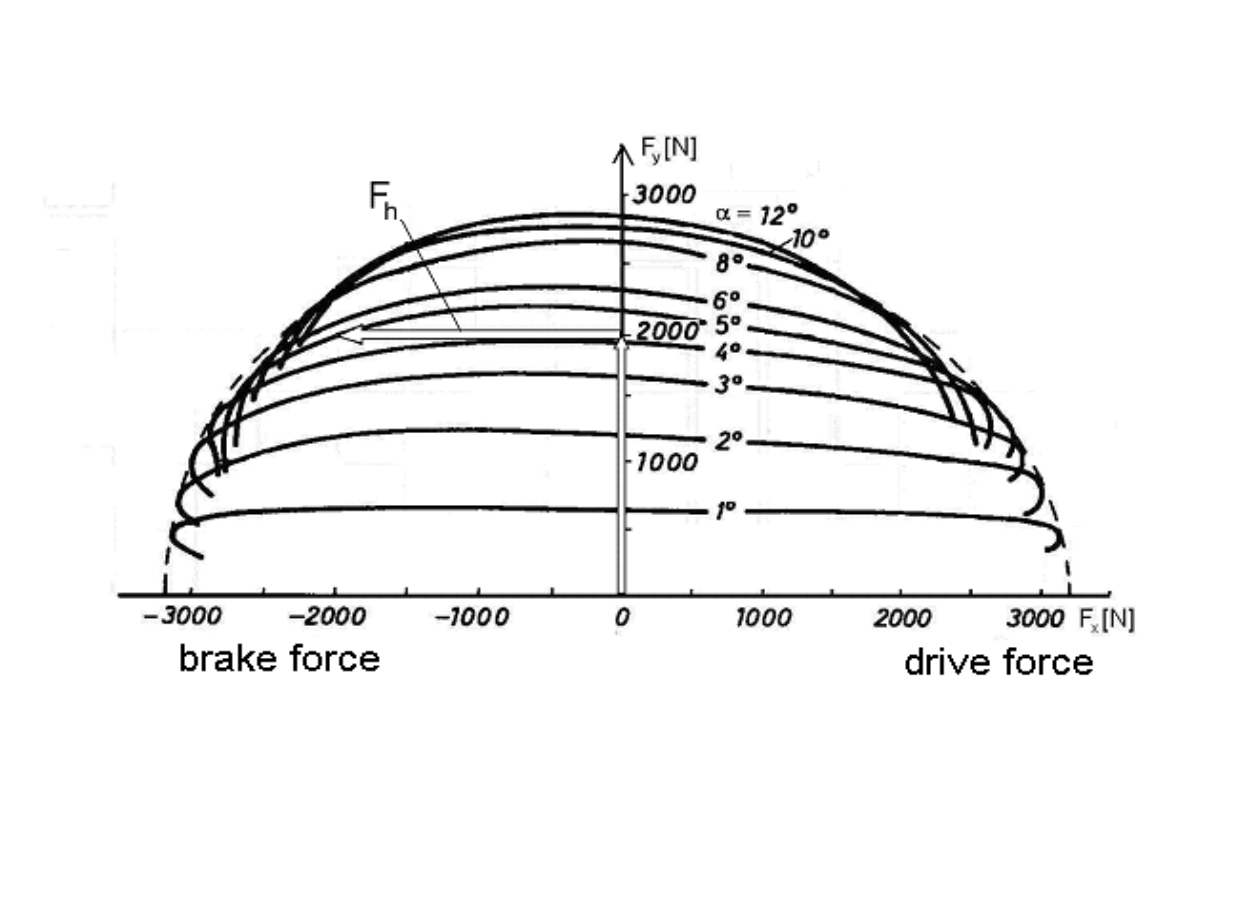
CHARAKTERYSTYKI OPON
Wpływ siły wzdłużnej F
x
na zależność kąta znoszenia α od
siły poprzecznej F
y
Współpraca opony z
Współpraca opony z
nawierzchnią
nawierzchnią
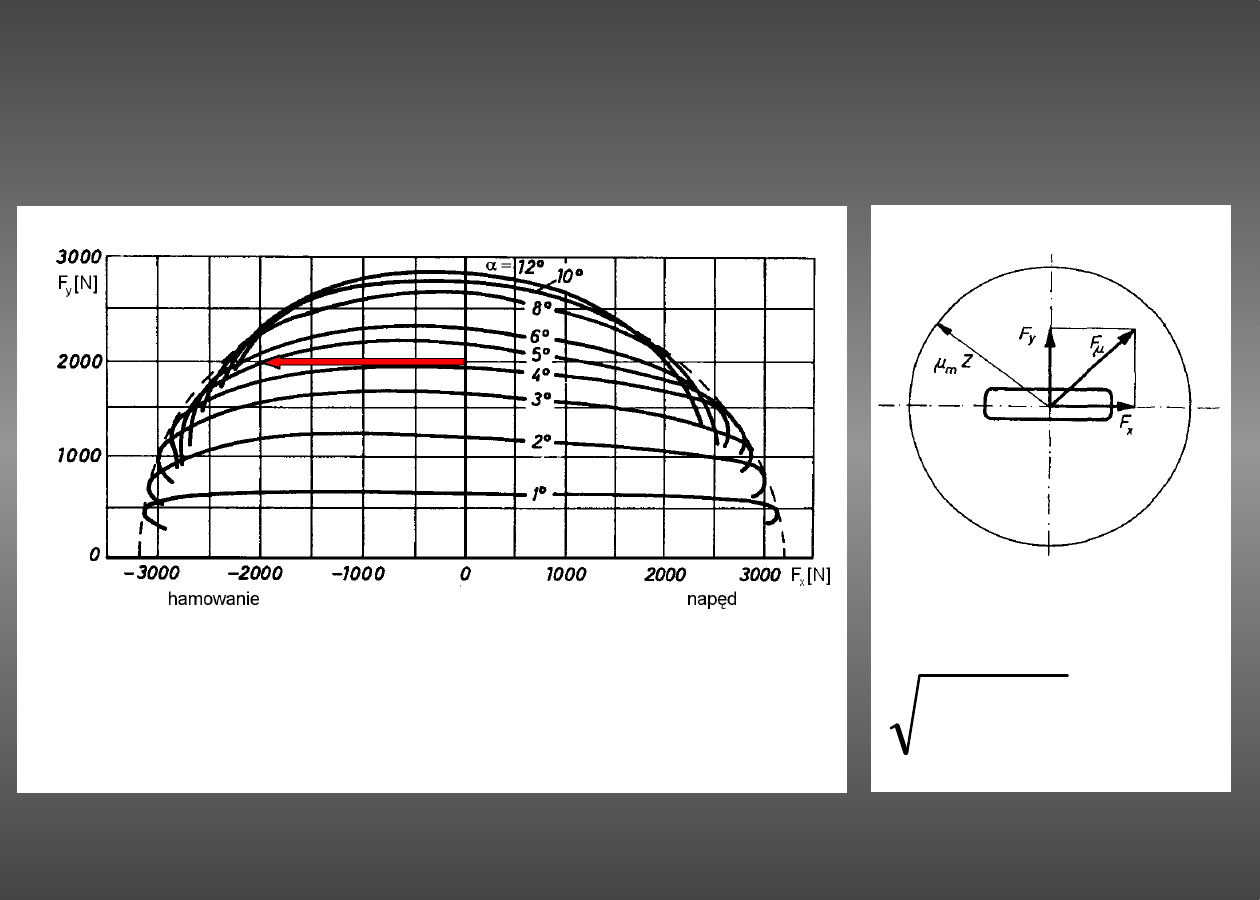
Boczne znoszenie opony, przyczepność poprzeczna
Zależność pomiędzy siłą wzdłużną F
x
i poprzeczną F
y
dla różnych wartości kąta znoszenia i poślizgu wzdłużnego S
Granica przyczepności
F
F
Z
x
y
m
2
2
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
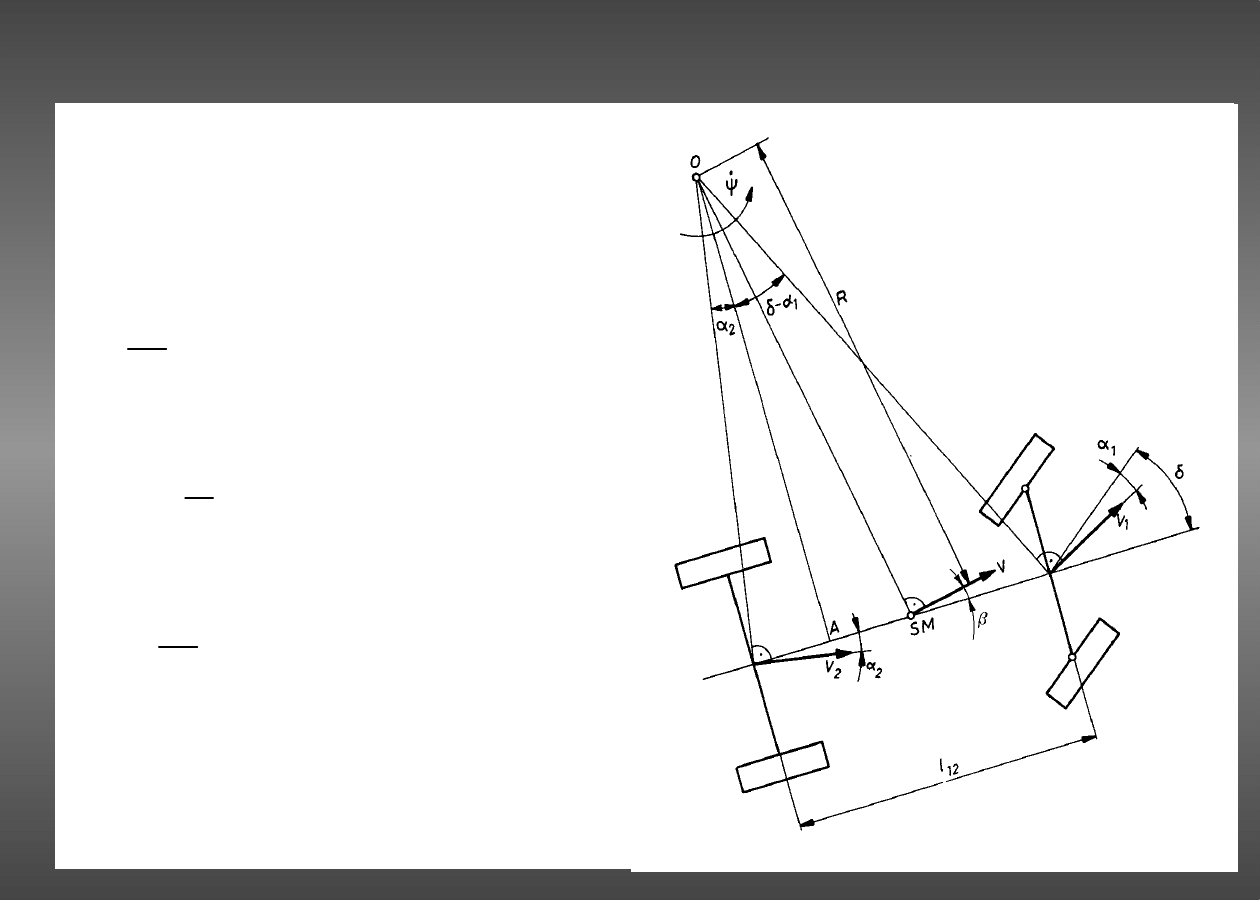
Zależności kinematyczne w ruchu po okręgu
2
1
12
1
2
12
v
l
R
v
R
l
Mechanika ruchu po krzywoliniowego
Mechanika ruchu po krzywoliniowego
Pod- i nadsterowność
δ
δ
α
1
α
1
α
2
α
2
Samochód podsterowny
α
1
> α
2
Samochód nadsterowny
α
1
< α
2
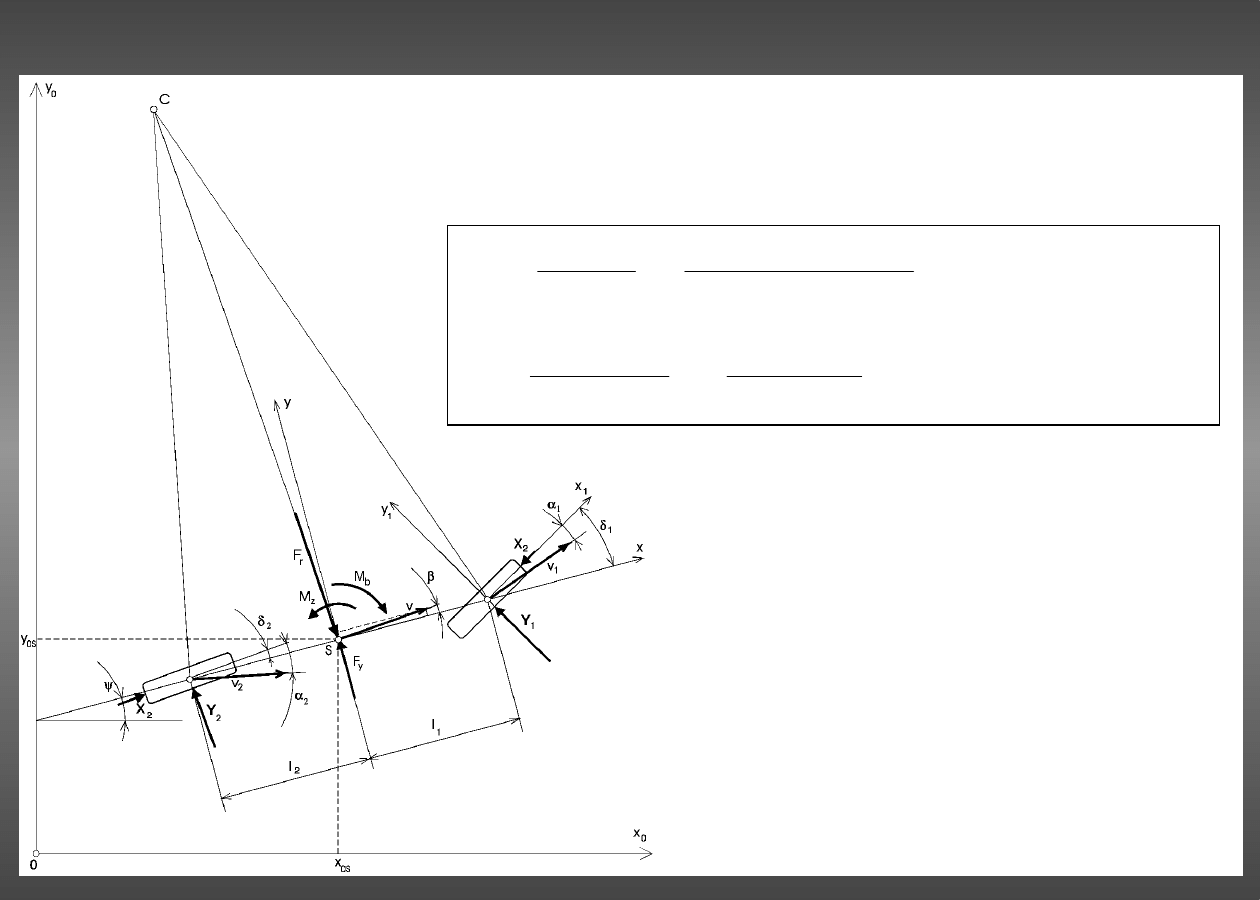
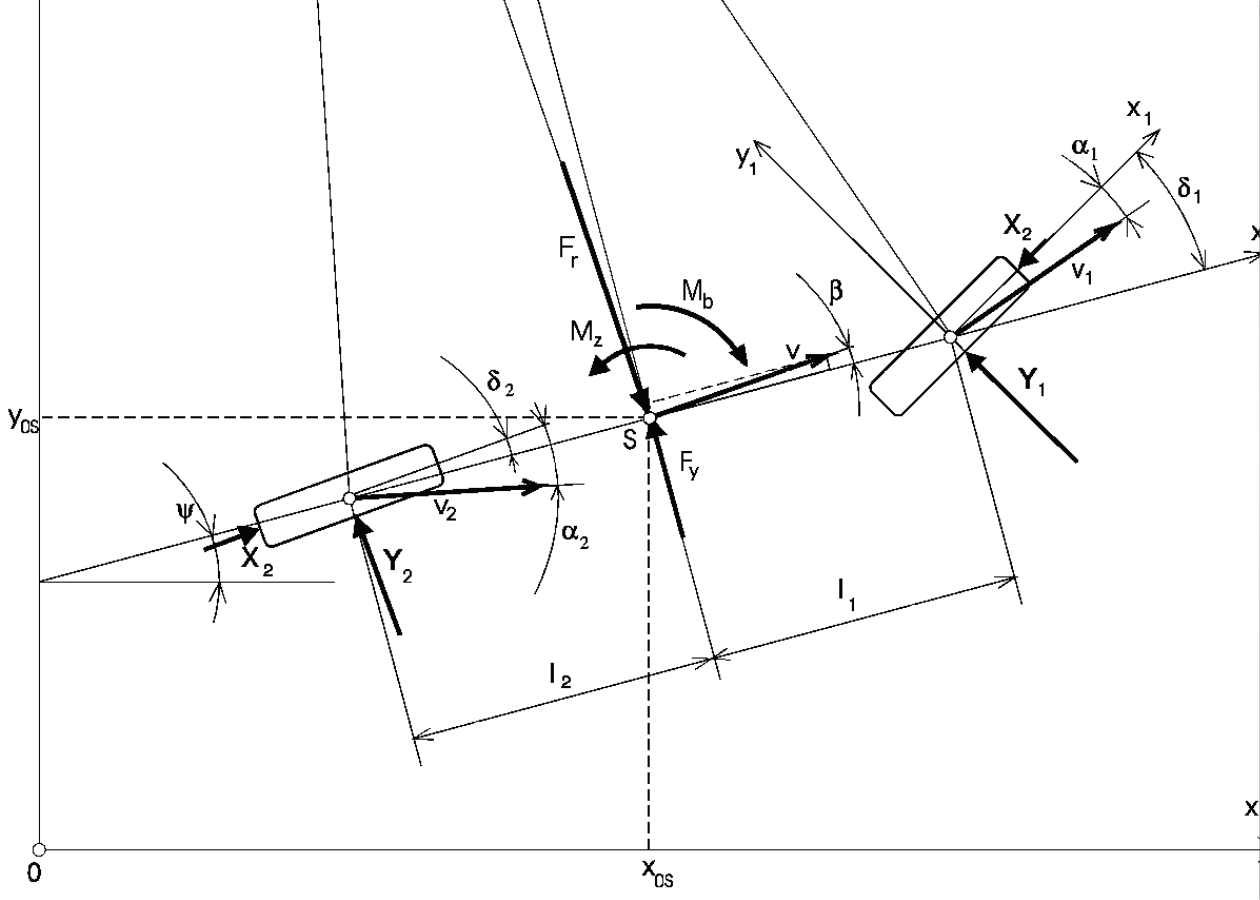
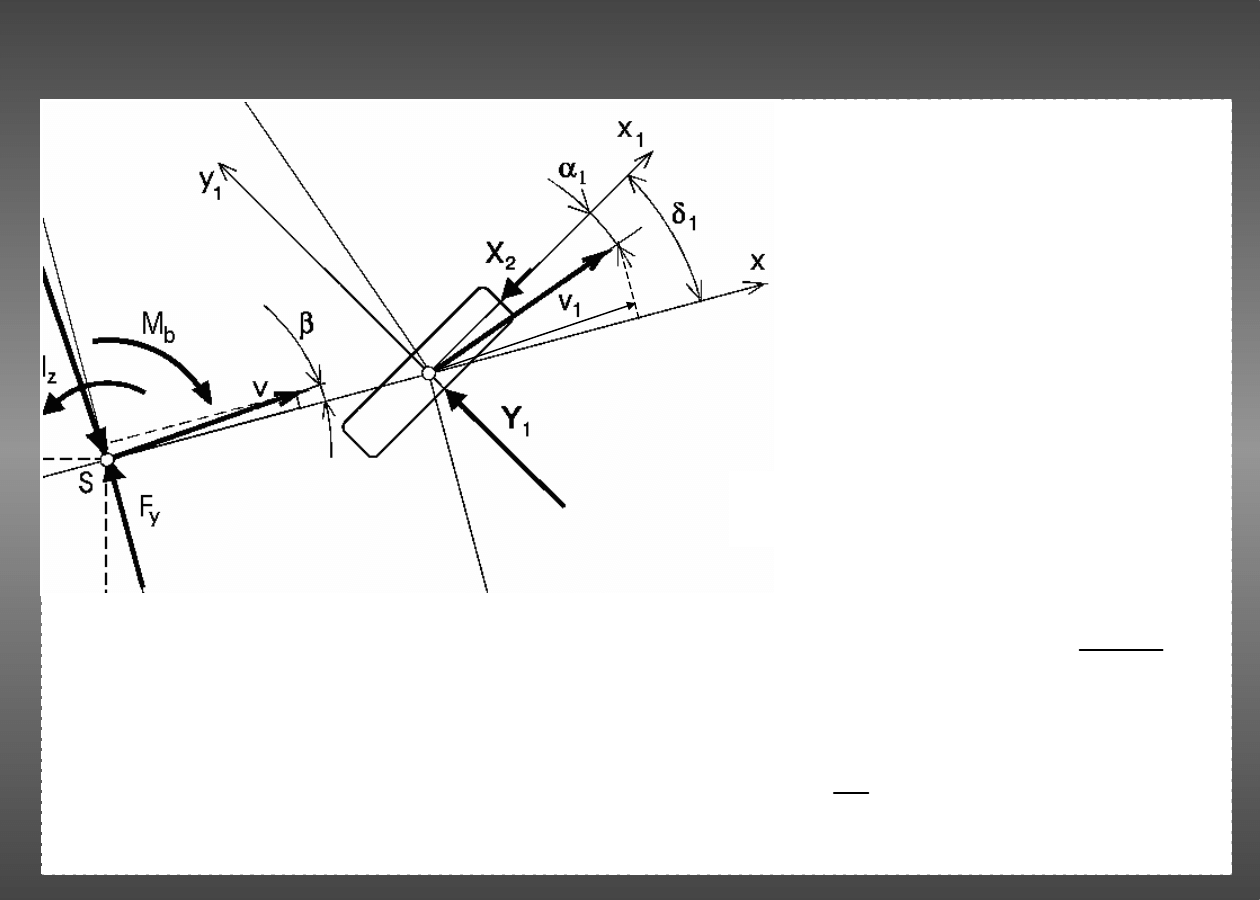
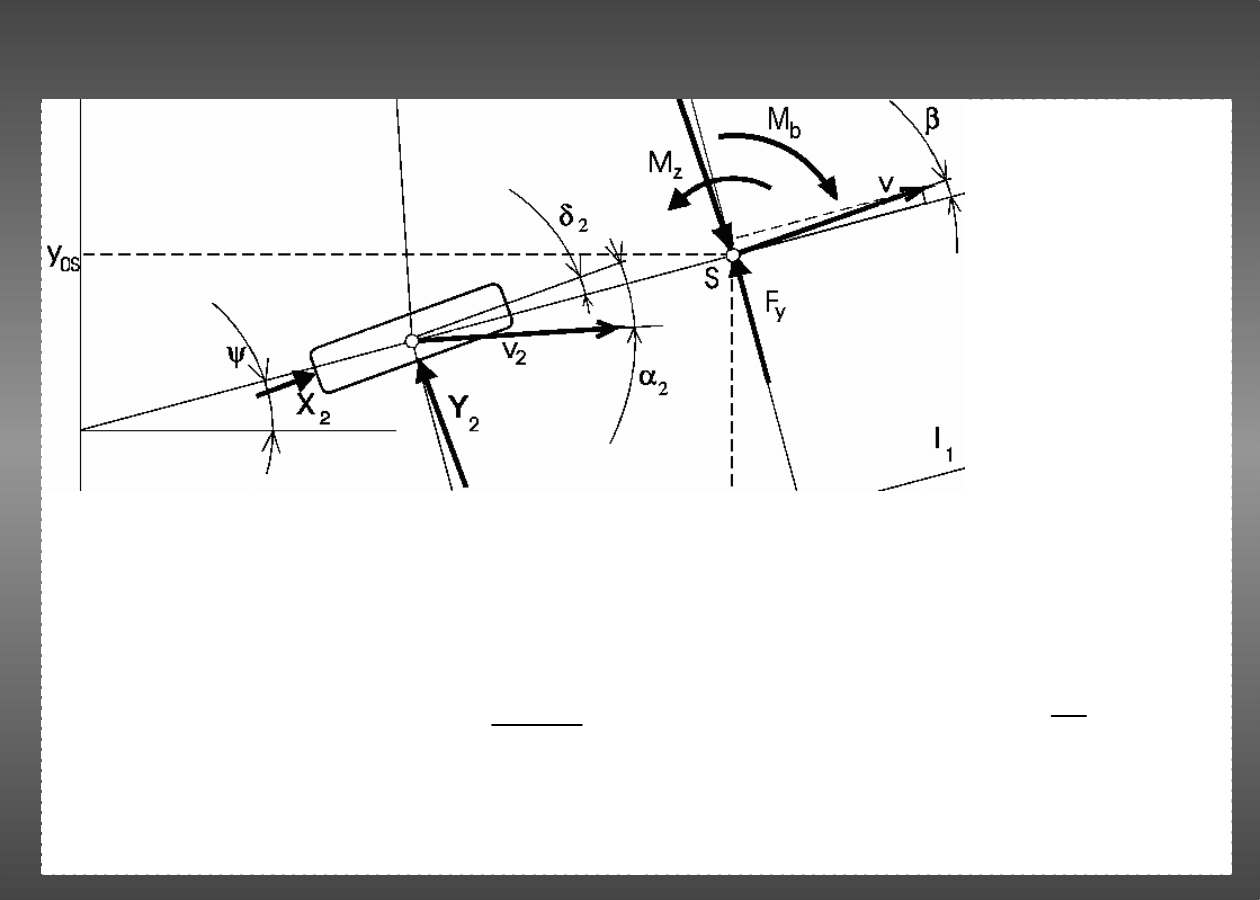
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Zależności
dynamiczne
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Równanie sił w kierunku osi y
-F
by
+ Y
1
cos
1
+ Y
2
cos
2
+ F
y
= 0
Równanie momentów
-M
b
+ Y
1
cos
1
l
1
- Y
2
cos
2
l
2
+ M
z
= 0
Siła bezwładności F
by
jest sumą rzutów na oś y siły
odśrodkowej F
r
= m v i siły bezwładności wynikającej ze
zmiany prędkości v
F
by
= m v cos + m sin = m + m
v
x
y
Równania ruchu
-m ( ) + Y
1
+ Y
2
+ F
y
= 0
-J + Y
1
l
1
- Y
2
l
2
+ M
z
= 0
y
x
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Y
1
= K
1
α
1
x
l
1
1
1
x
y
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Y
2
= K
2
α
2
x
l
2
2
2
x
y
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
-m ( ) + Y
1
+ Y
2
+ F
y
= 0
-J + Y
1
l
1
- Y
2
l
2
+ M
z
= 0
y
x
0
F
x
l
x
y
K
x
l
x
y
K
y
x
m
y
2
2
2
1
1
1
0
M
x
l
x
y
l
K
x
l
x
y
l
K
J
z
2
2
2
2
1
1
1
1
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
0
F
x
l
x
y
K
x
l
x
y
K
y
x
m
y
2
2
2
1
1
1
0
M
x
l
x
y
l
K
x
l
x
y
l
K
J
z
2
2
2
2
1
1
1
1
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
const
v
x
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
Dla ustalonego stanu ruchu: δ
2
= 0, δ
1
= const, = const,
= const,
y
0
,
0
y
1
1
y
2
2
2
1
1
2
1
K
F
v
v
m
l
K
l
K
y
v
K
K
1
1
1
z
2
2
2
2
1
1
2
2
1
1
l
K
M
v
l
K
l
K
y
v
l
K
l
K
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
1
1
y
2
2
2
1
1
2
1
K
F
v
v
m
l
K
l
K
y
v
K
K
1
1
1
z
2
2
2
2
1
1
2
2
1
1
l
K
M
v
l
K
l
K
y
v
l
K
l
K
Dla F
y
= 0, M
z
= 0
1
2
2
1
1
2
2
12
2
1
12
2
1
l
K
l
K
v
m
l
K
K
v
l
K
K
1
1
2
2
1
12
2
12
K
l
K
l
l
m
v
l
v
lub
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Inaczej
zapisując
1
2
2
1
12
12
1
K
l
K
l
l
m
v
v
l
Podstawiając
R
1
v
oraz
y
a
v
1
2
2
1
12
y
12
1
K
l
K
l
l
m
a
R
l
Kąt obrotu kierownicy: δ
H
= δ
1
i
uk
; i
uk
– przełożenie układu
kierowniczego
Kąt Ackermana:
R
l
12
A
2
1
1
2
12
y
A
H
uk
K
l
K
l
l
m
a
i
1
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
2
1
1
2
12
y
A
H
uk
K
l
K
l
l
m
a
i
1
Gradient podsterowności wg ISO 4138:
y
A
y
H
uk
da
d
da
d
i
1
GS
Dla ustalonego stanu ruchu: δ
H
= const, δ
A
= const, a
y
=
const
GS
a
i
1
y
A
H
uk
2
1
1
2
12
K
l
K
l
l
m
GS
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
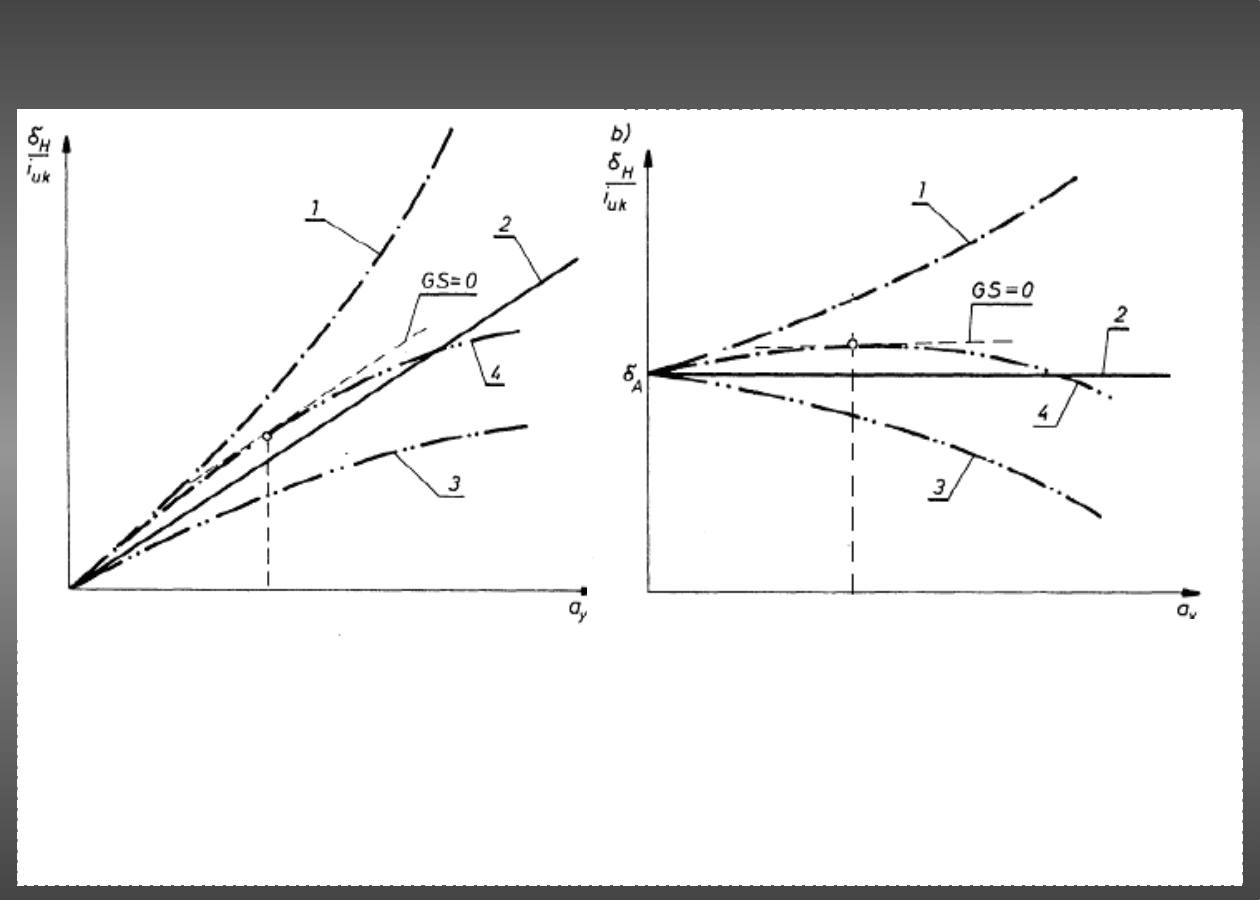
Ruch samochodu ze stałą
prędkością po okręgach o
różnych promieniach R
Ruch samochodu po okręgu o
stałym promieniu z różnymi
stałymi prędkościami v
1 – samochód podsterowny, 2 – neutralny, 3 – nadsterowny,
4 – samochód o zmiennej charakterystyce sterowności
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
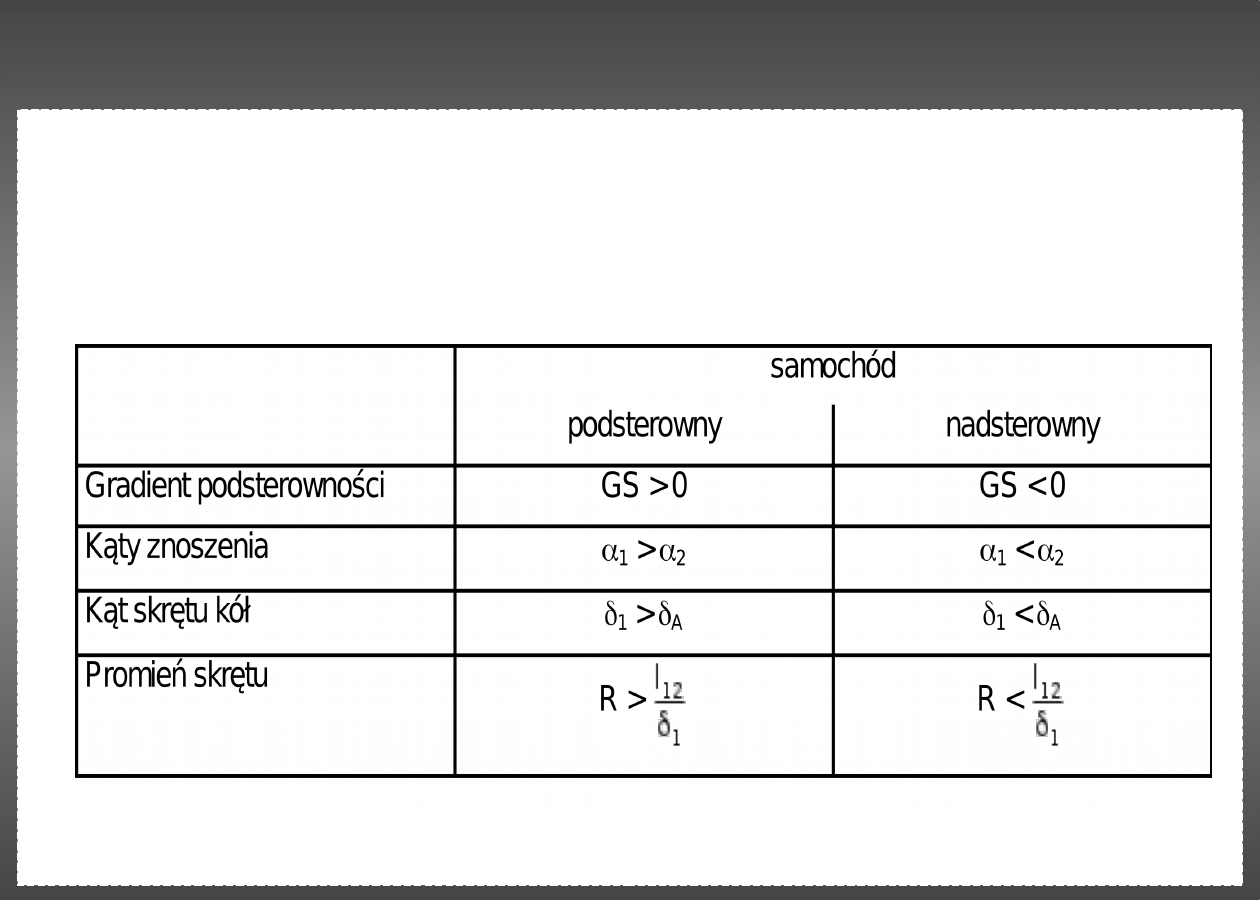
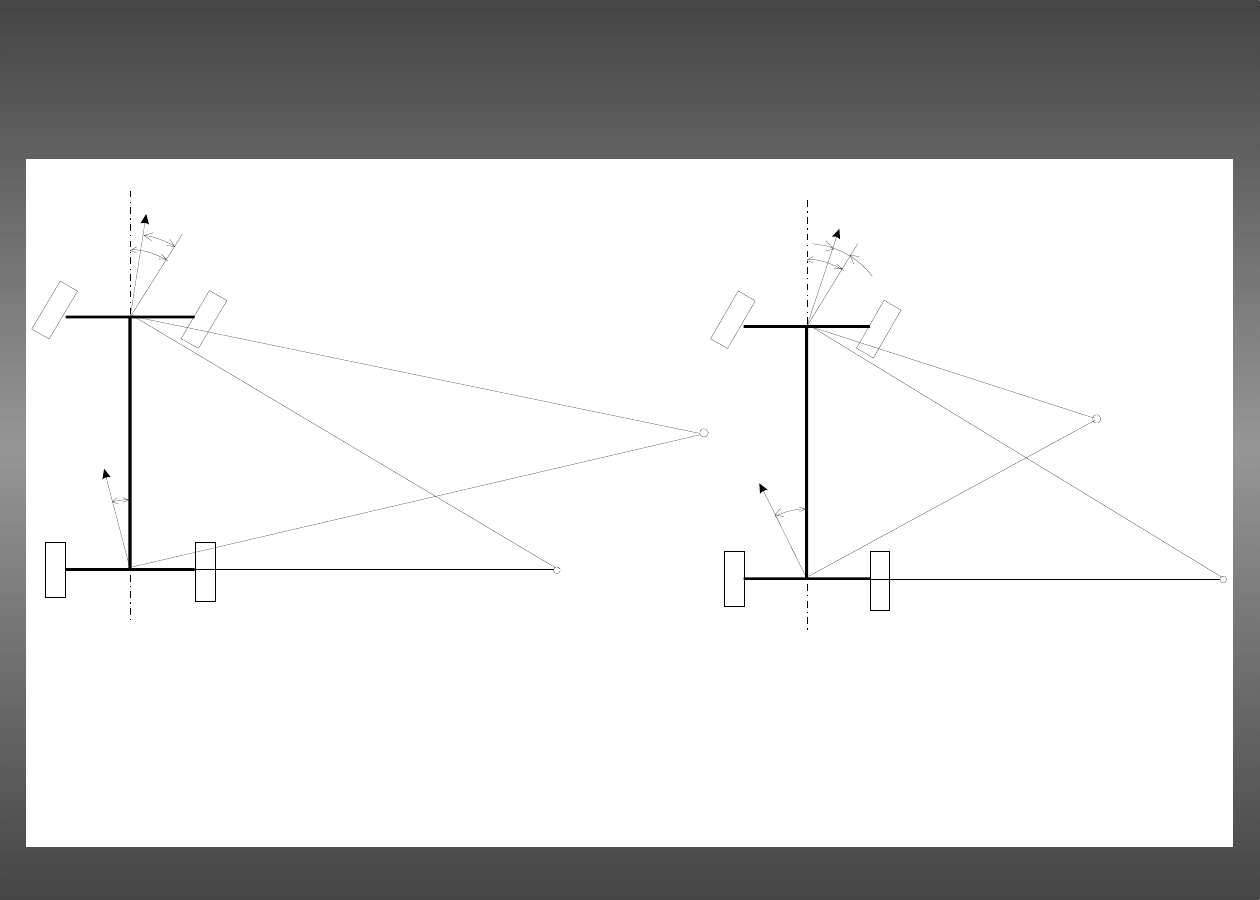
R >
R <
R >
R <
Porównanie zachowania się samochodu pod- i
nadsterownego w ustalonym stanie ruchu
Mechanika ruchu po krzywoliniowego
Mechanika ruchu po krzywoliniowego
Pod- i nadsterowność
δ
δ
α
1
α
1
α
2
α
2
Samochód podsterowny
α
1
> α
2
Samochód nadsterowny
α
1
< α
2
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
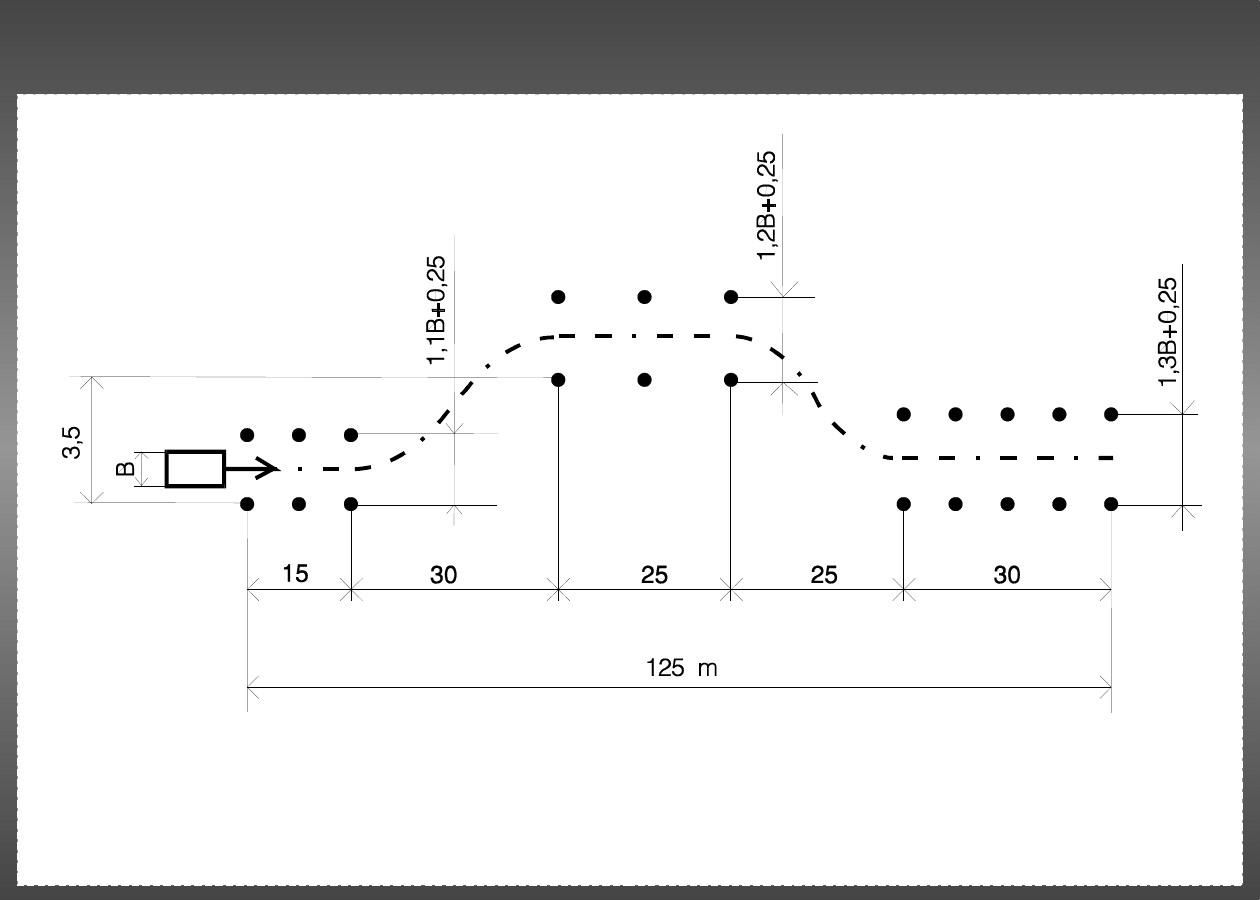
Tor jazdy stosowany w teście „podwójna zmiana pasa
ruchu” wg normy ISO 3888; B – szerokość samochodu
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego
Zależności dynamiczne w
ruchu po okręgu
2
2
v
1
v
2
F
y
Y
1
Y
2
1
-
1
l
l
1
2
l
1 2
R
S M
O
y
2
y
a
m
v
m
R
v
m
F
2
1
12
l
R
2
1
1
2
12
y
12
k
l
k
l
l
a
m
v
l
2
1
12
R
l
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
Wyszukiwarka
Podobne podstrony:
kolos 2, TR ruch krzyw
Pojazdy ruch krzyw OgarnijTemat com
TR ruch krzyw
prezentacja Ruch konsumencki
Wykł 05 Ruch drgający
ruch wektorowy
Ustalony ruch przez dyfuzje gazow wg Maxwella
Prezentacja klaryfikator ruch
POJĘCIA CHARAKTERYZUJĄCE RUCH FALOWY
więcej podobnych podstron