
MECHANIKA RUCHU
KRZYWOLINIOWEGO
Andrzej Reński
Politechnika Warszawska
Instytut Pojazdów
Warszawa 2007
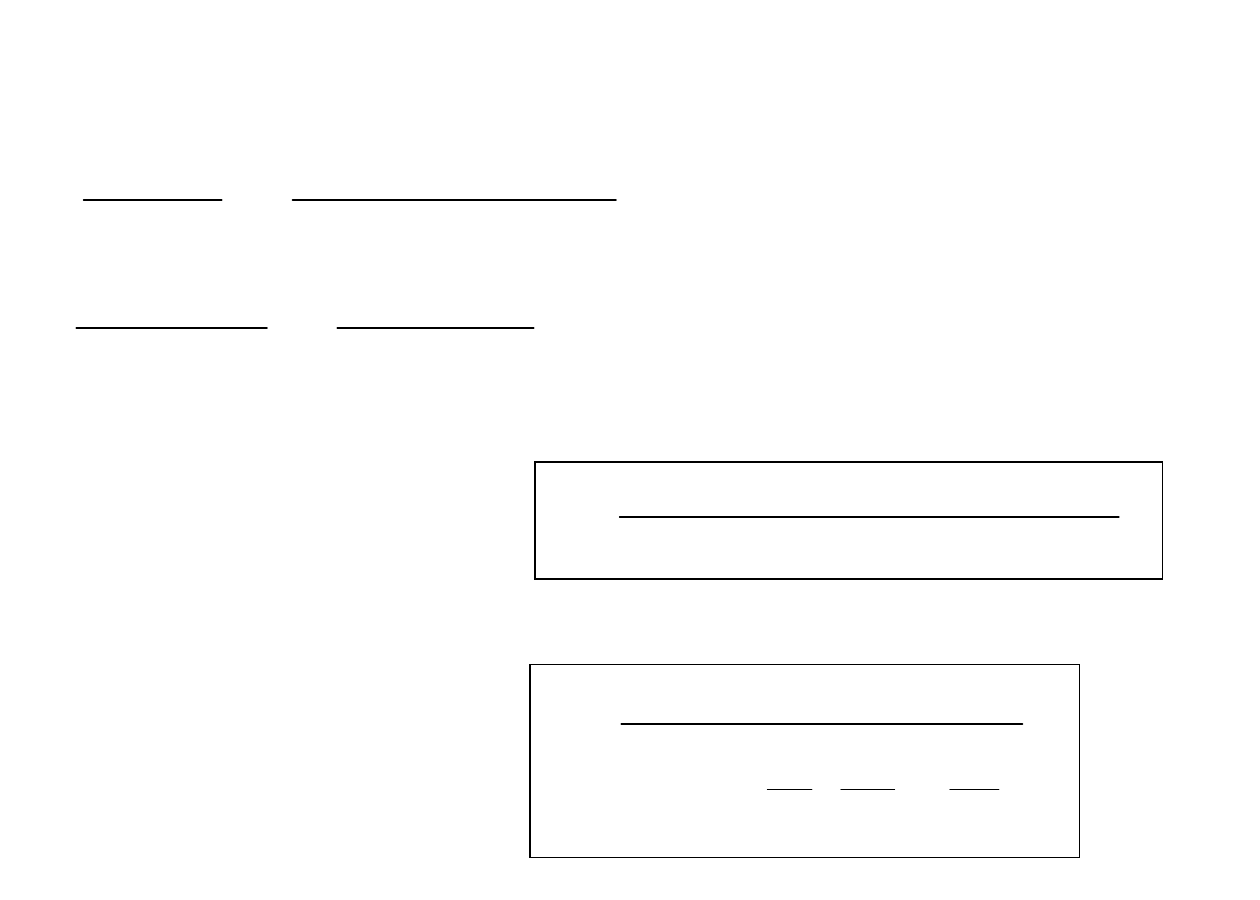
Współpraca
Współpraca
opony z
opony z
nawierzchnią
nawierzchnią
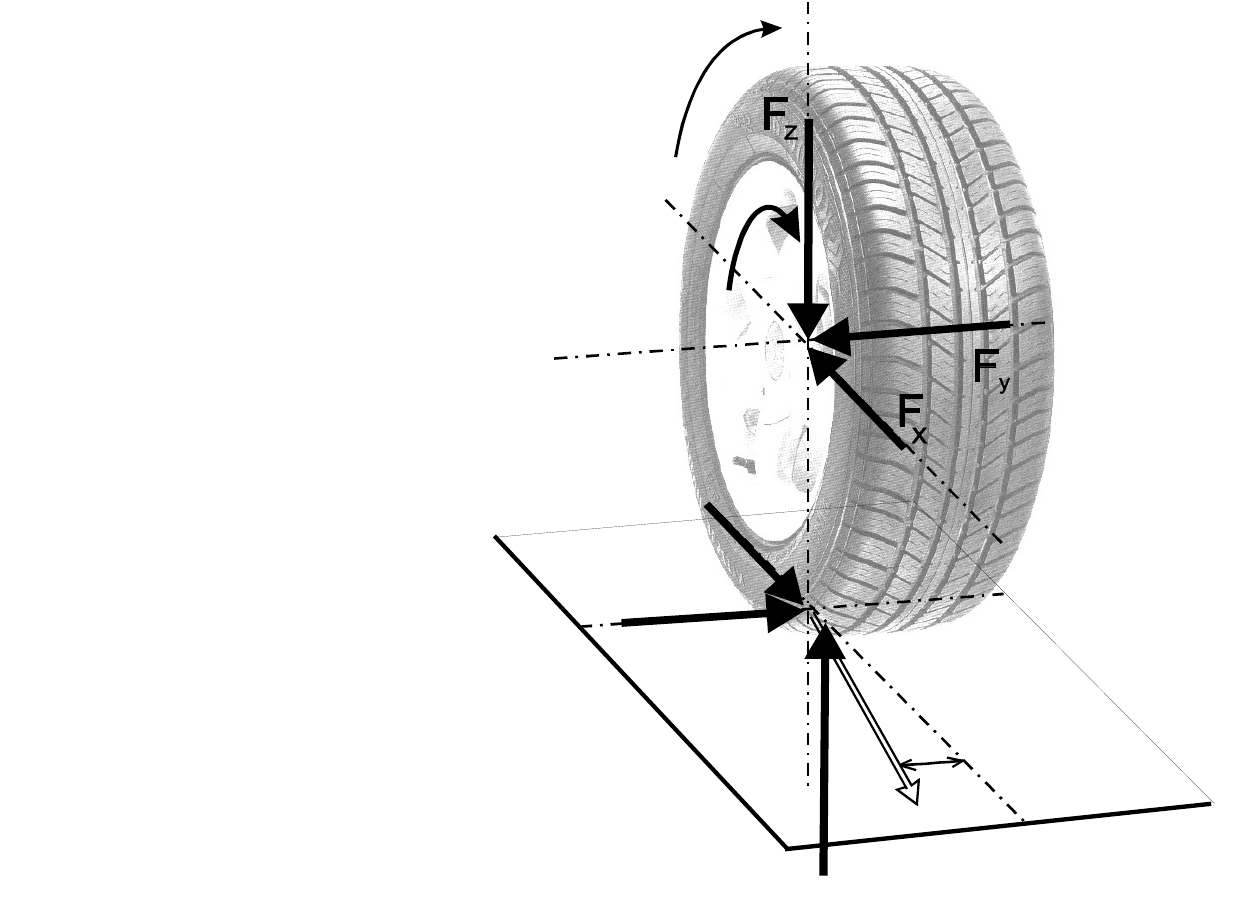
Z
Y
v
M
X
Siły działające na
koło
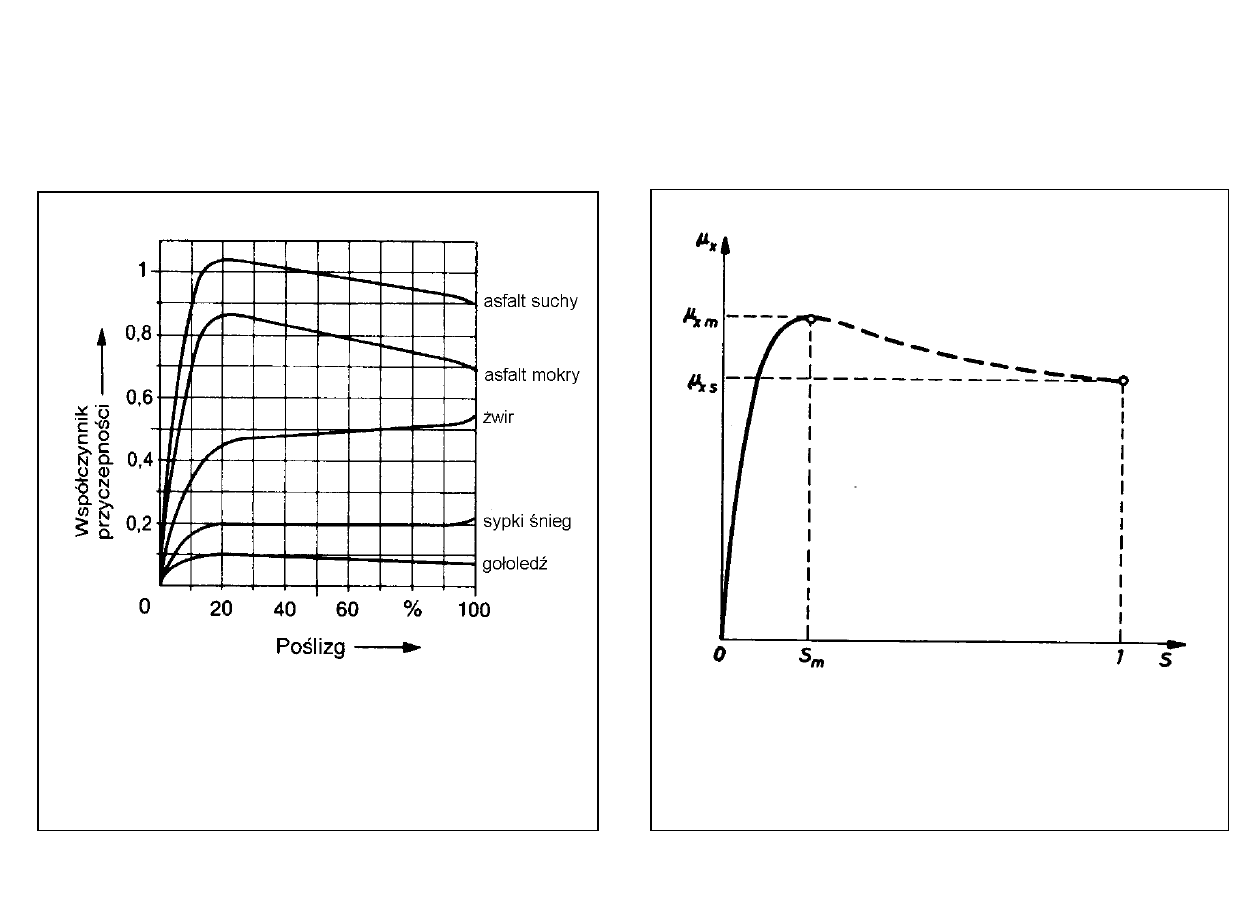
Współpraca opony z nawierzchnią
Współczynnik
przyczepności w
funkcji poślizgu
Współczynnik przyczepności
przylgowej i poślizgowej
Przyczepność wzdłużna
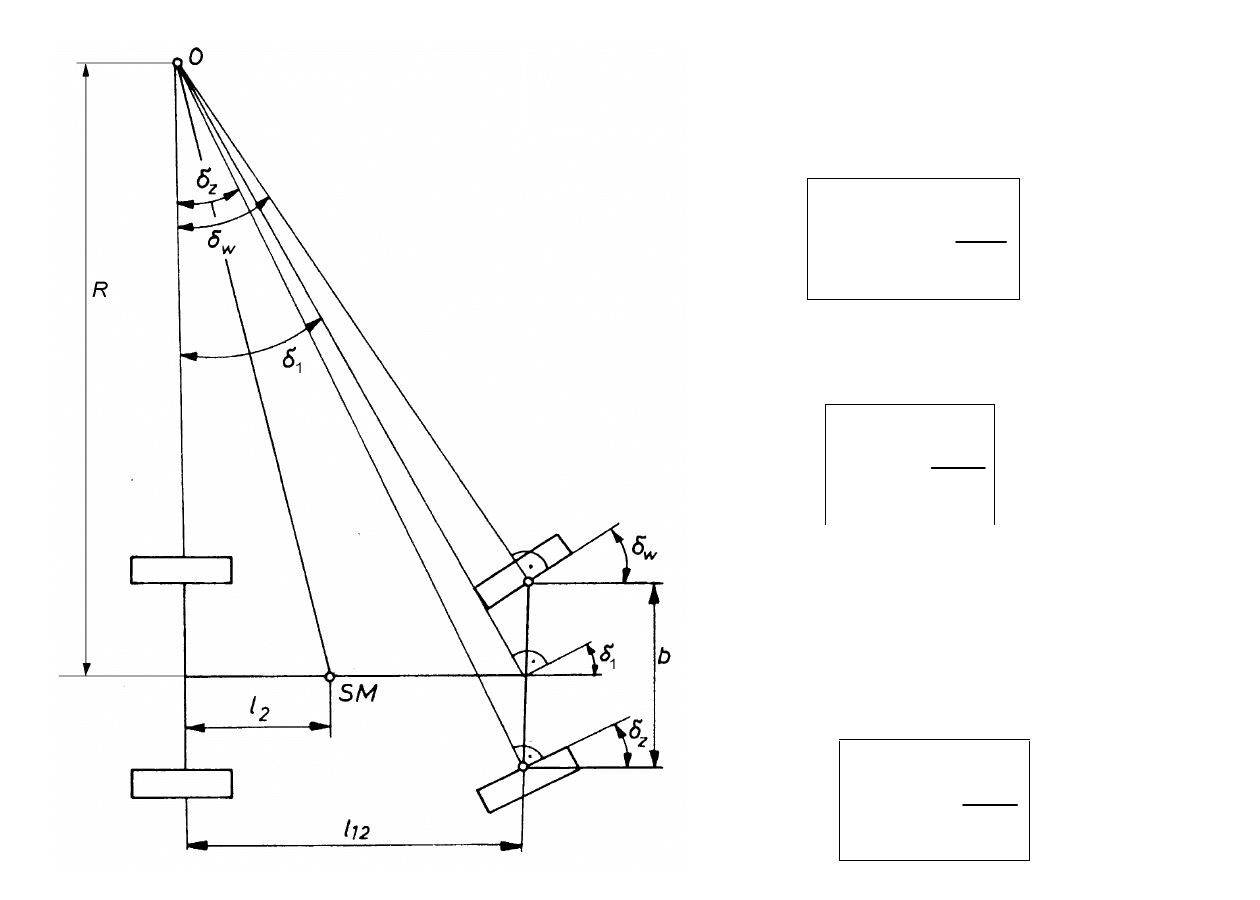
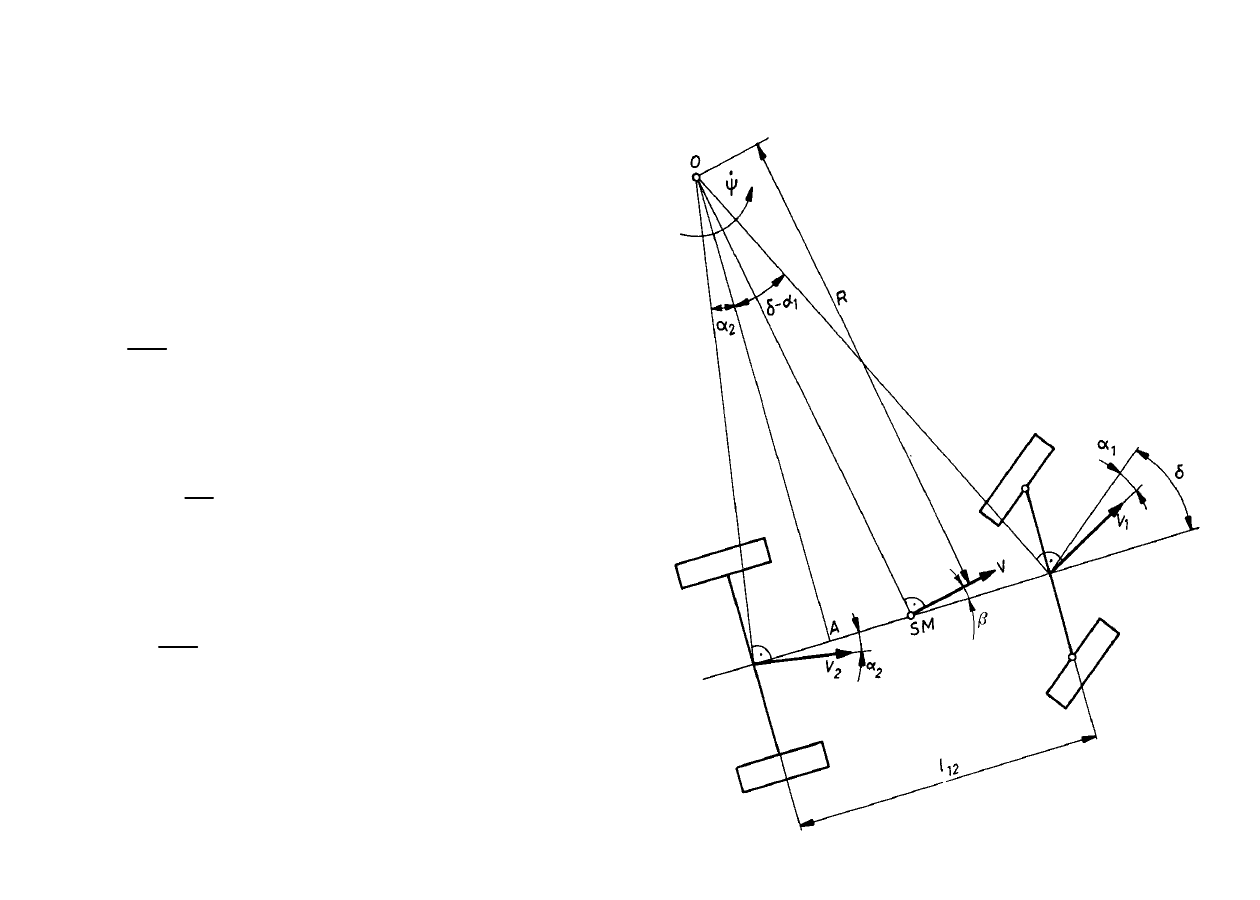
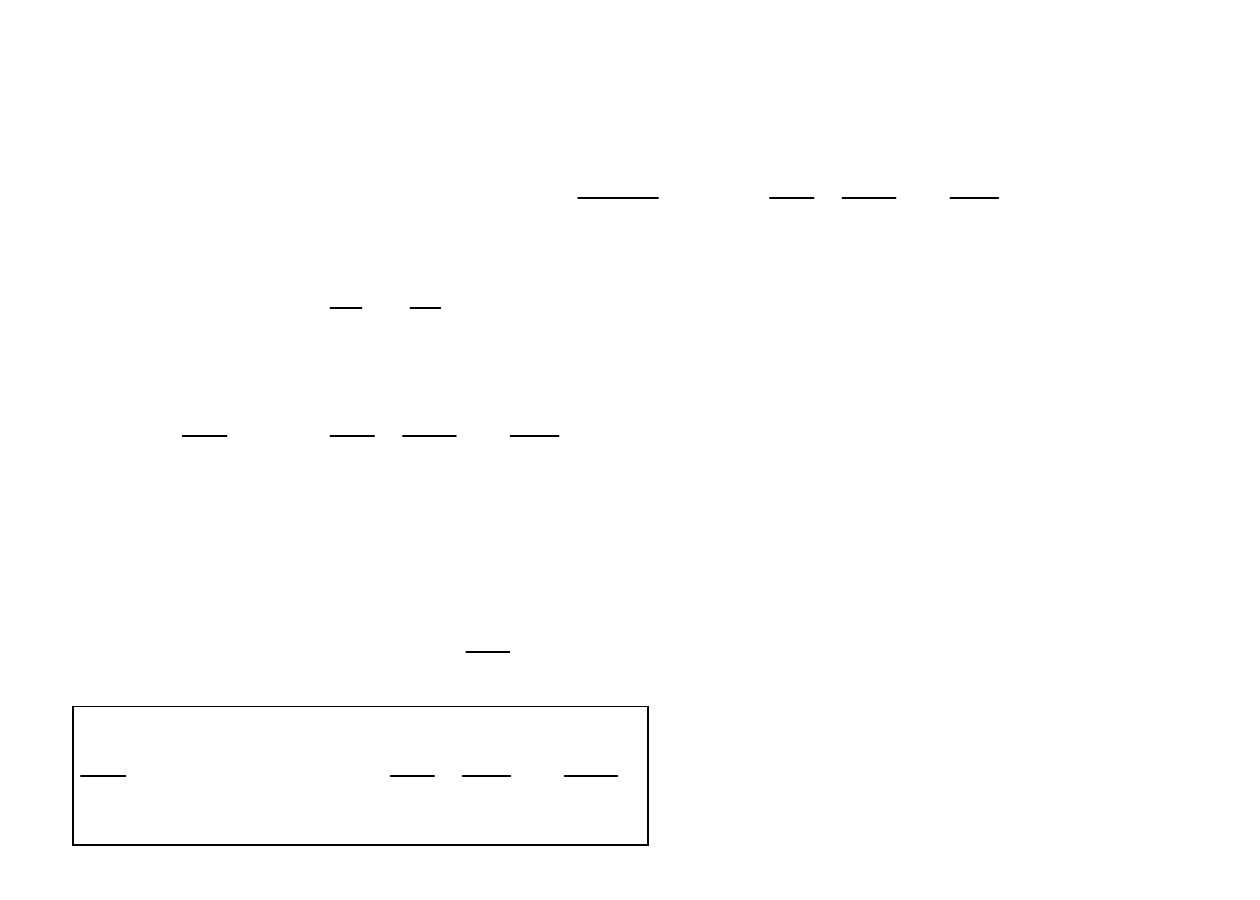
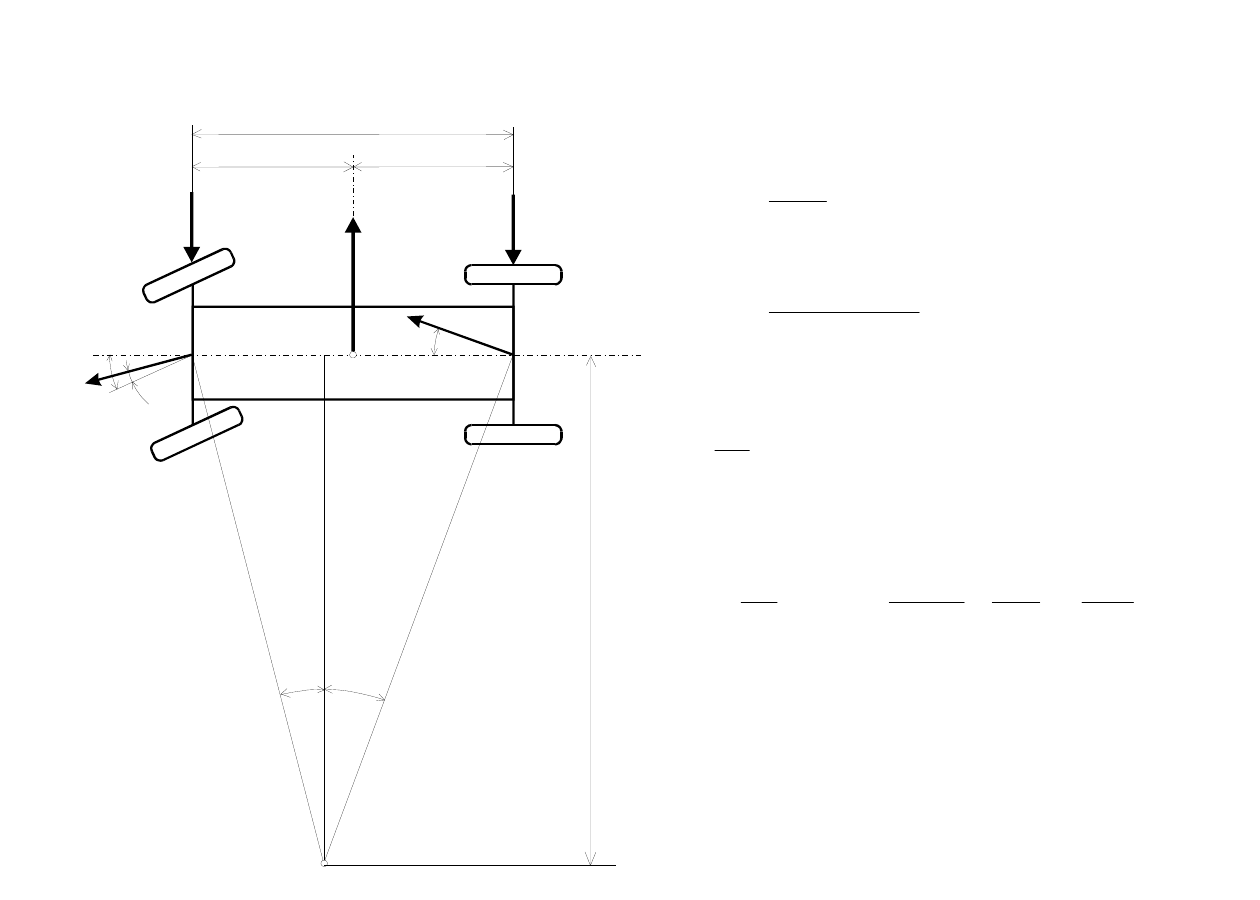
ZALEŻNOŚCI
GEOMETRYCZNE
R
l
tg
12
1
Dla małych kątów
1
:
R
l
12
1
Teoretyczny kąt
skrętu kół
kierowanych - kąt
Ackermana δ
A
:
R
l
12
A
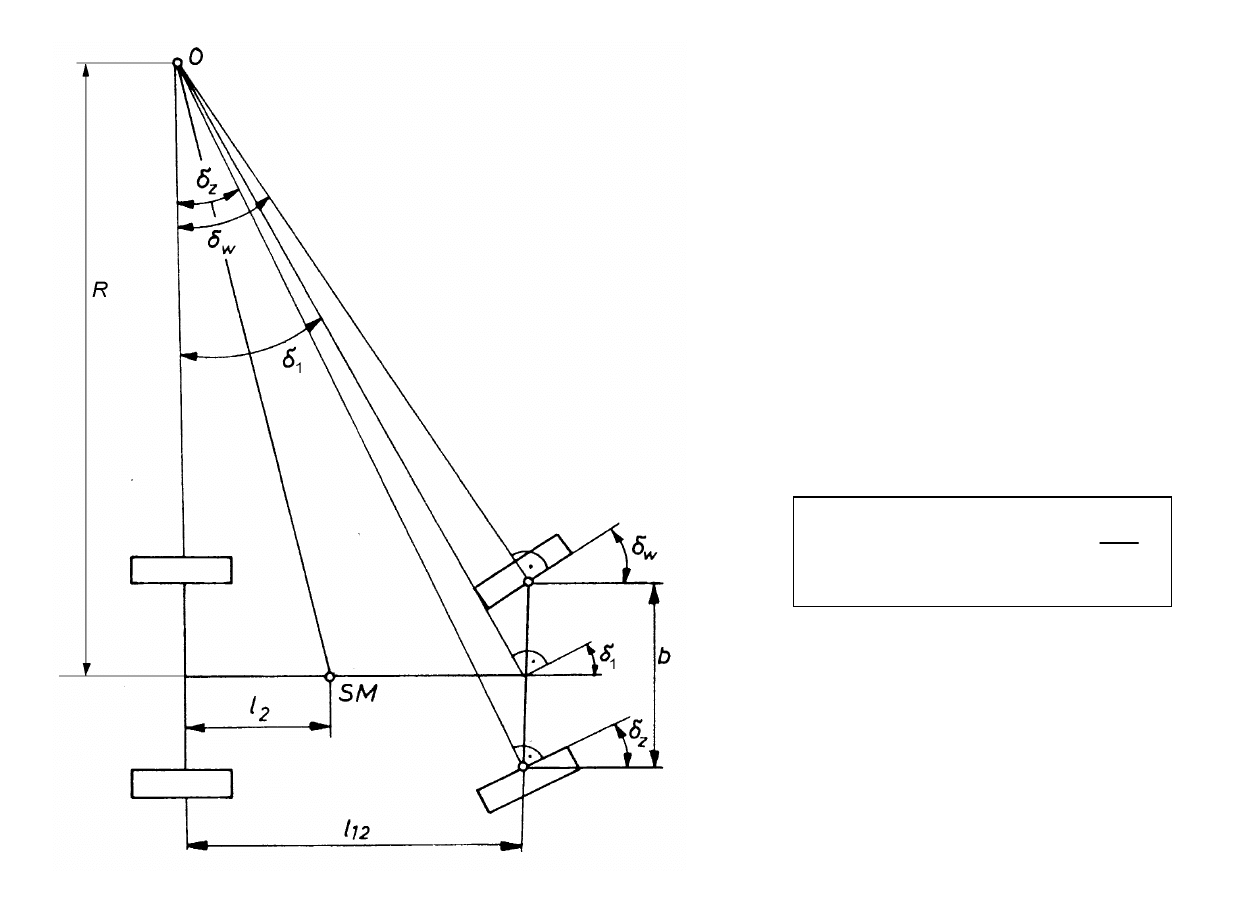
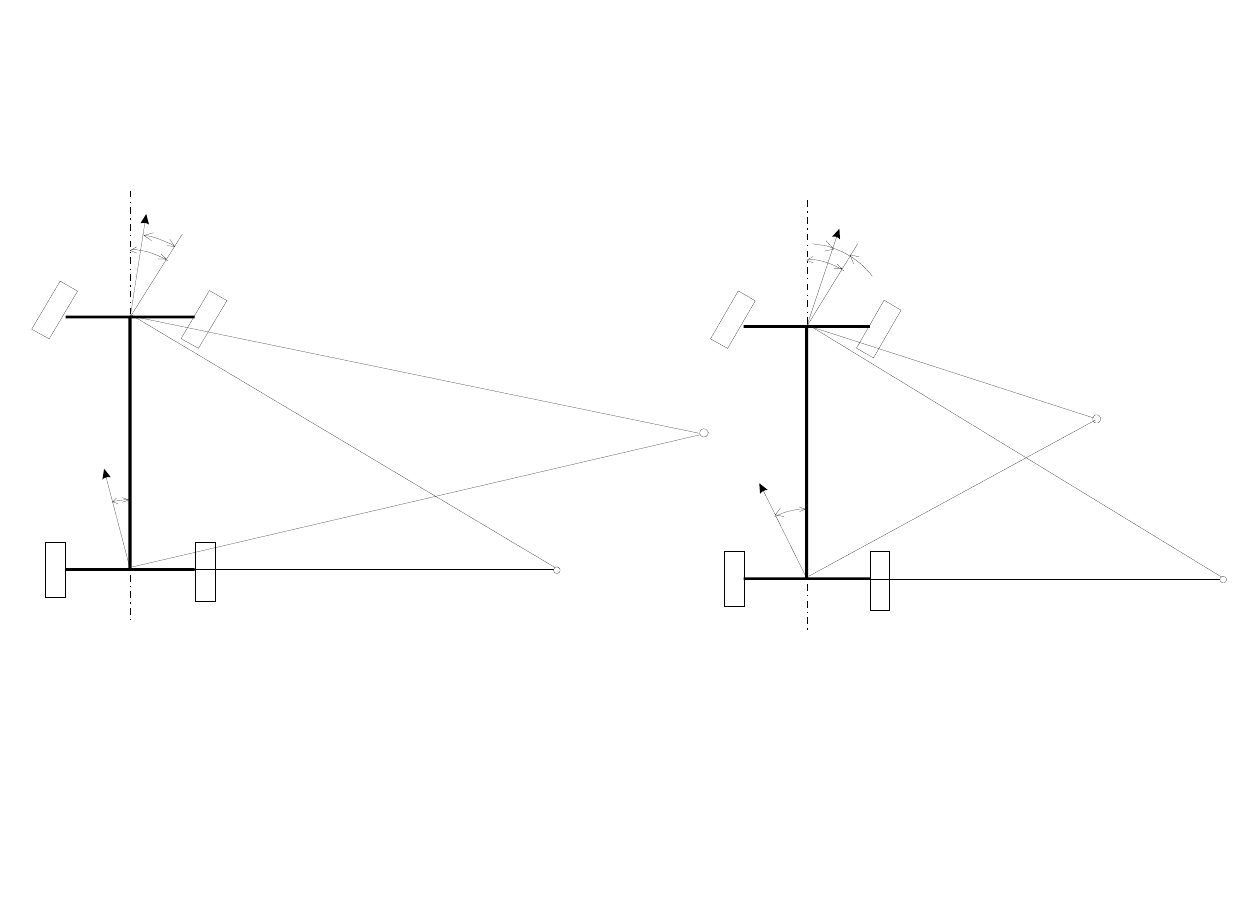
ZALEŻNOŚCI
GEOMETRYCZNE
Zależnośc pomiędzy
kątem skrętu koła
wewnętrznego
w
i
zewnętrznego
z
:
12
w
z
l
b
ctg
ctg
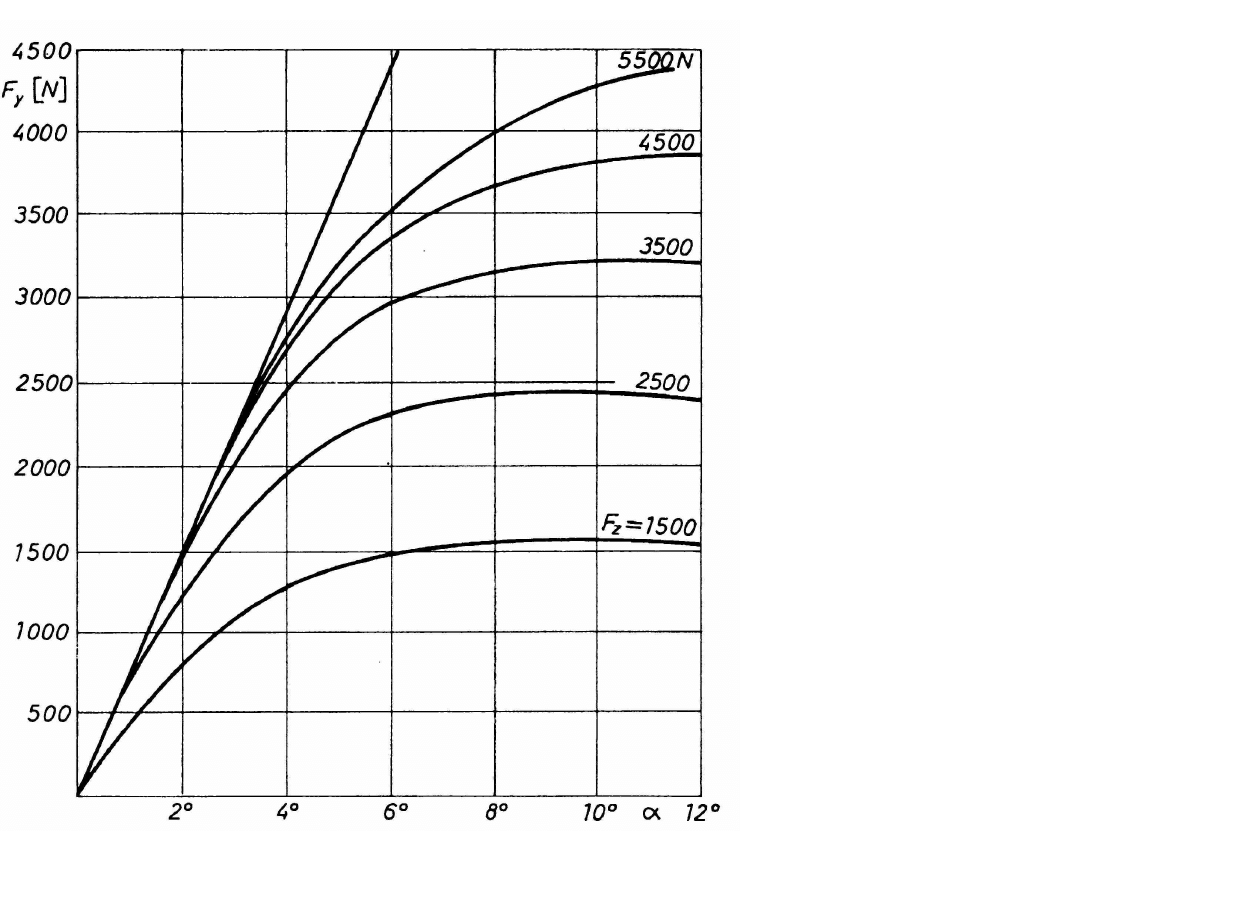
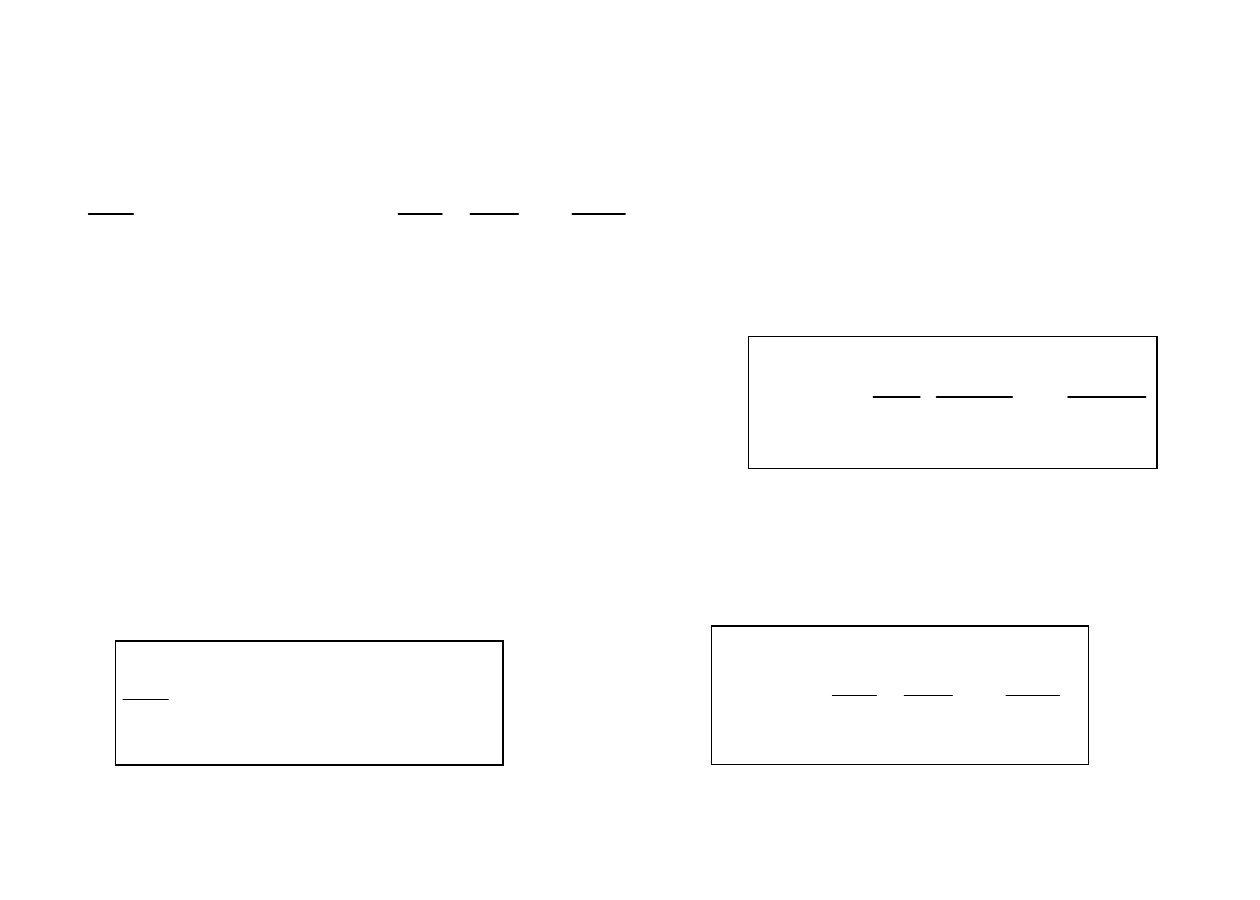
CHARAKTERYSTYKI
OPON
(
opona
175HR14
)
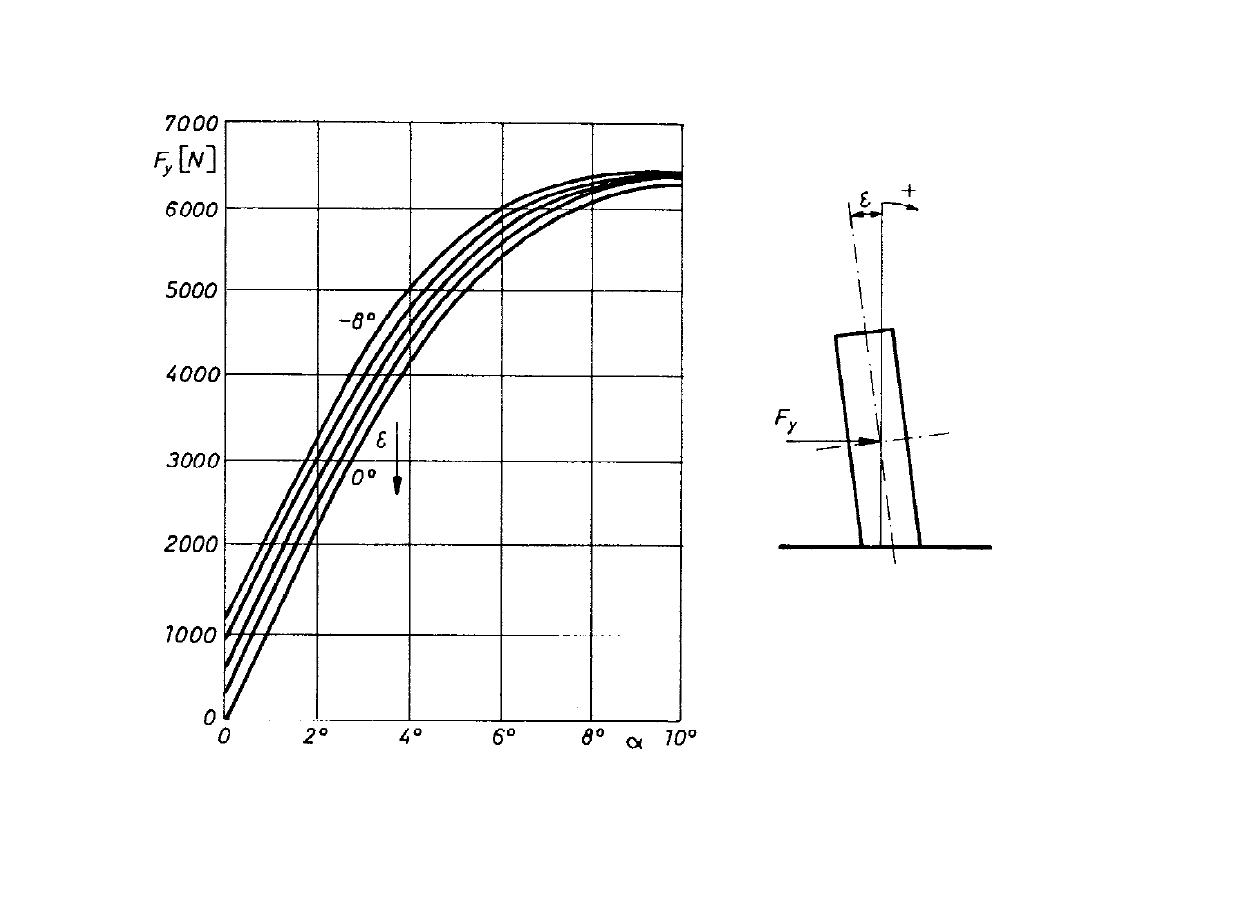
CHARAKTERYSTYKI OPON
Wpływ kąta pochylenia koła
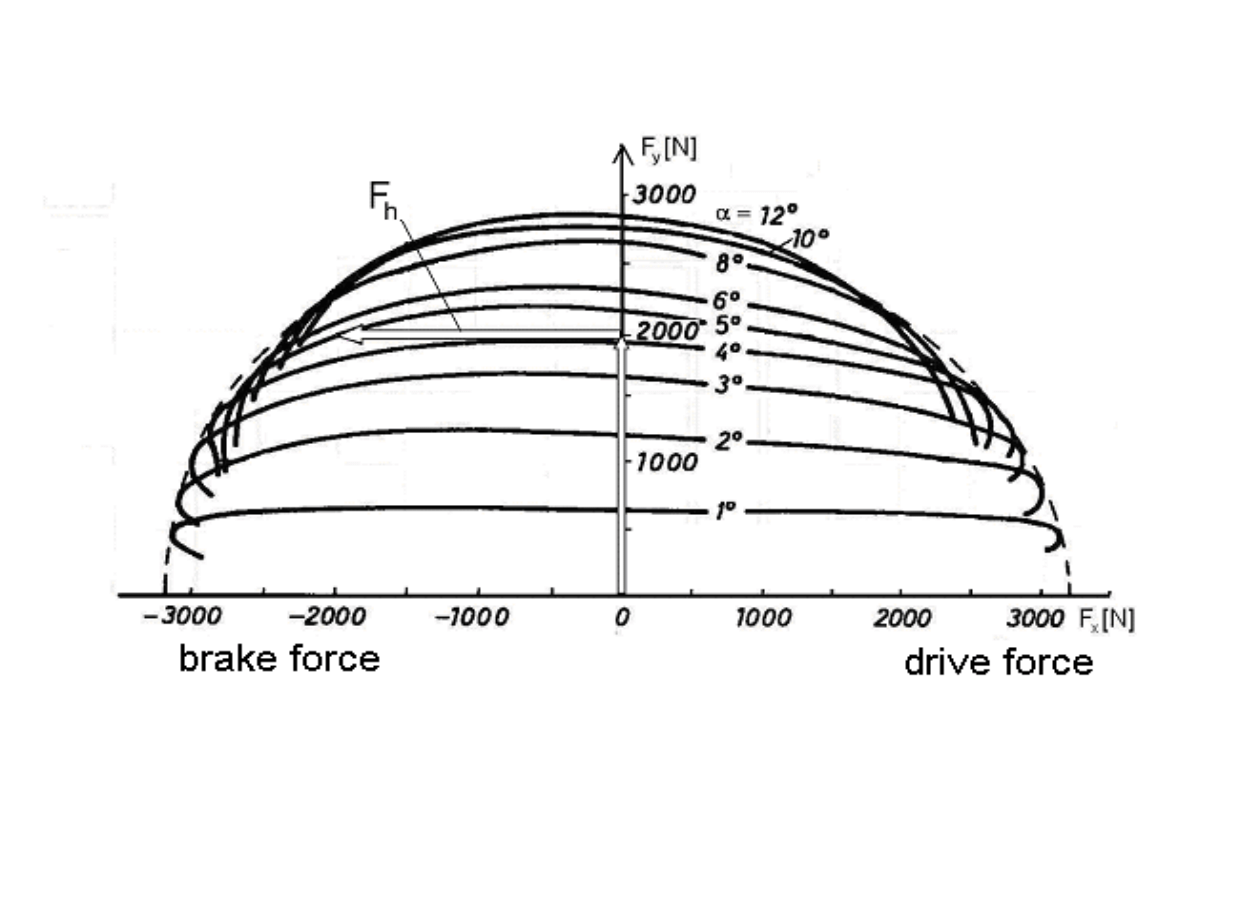
CHARAKTERYSTYKI OPON
Wpływ siły wzdłużnej F
x
na zależność kąta znoszenia α od
siły poprzecznej F
y
Współpraca opony z
nawierzchnią
Boczne znoszenie opony, przyczepność poprzeczna
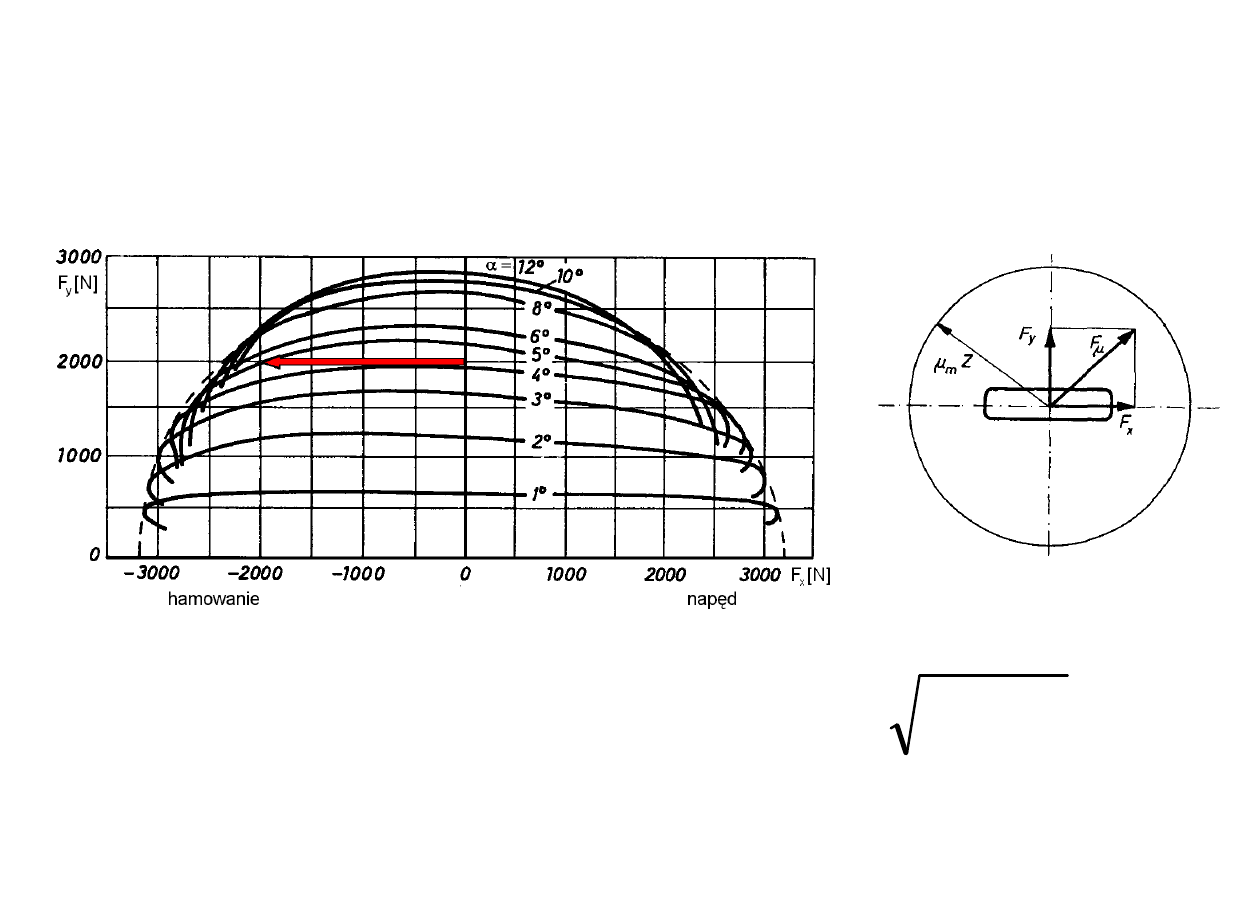
Zależność pomiędzy siłą wzdłużną F
x
i poprzeczną F
y
dla różnych wartości kąta znoszenia i poślizgu wzdłużnego S
Granica przyczepności
F
F
Z
x
y
m
2
2
Mechanika ruchu krzywoliniowego
Zależności kinematyczne w ruchu po okręgu
2
1
12
1
2
12
v
l
R
v
R
l
Mechanika ruchu po krzywoliniowego
Pod- i nadsterowność
δ
δ
α
1
α
1
α
2
α
2
Samochód podsterowny
α
1
> α
2
Samochód nadsterowny
α
1
< α
2
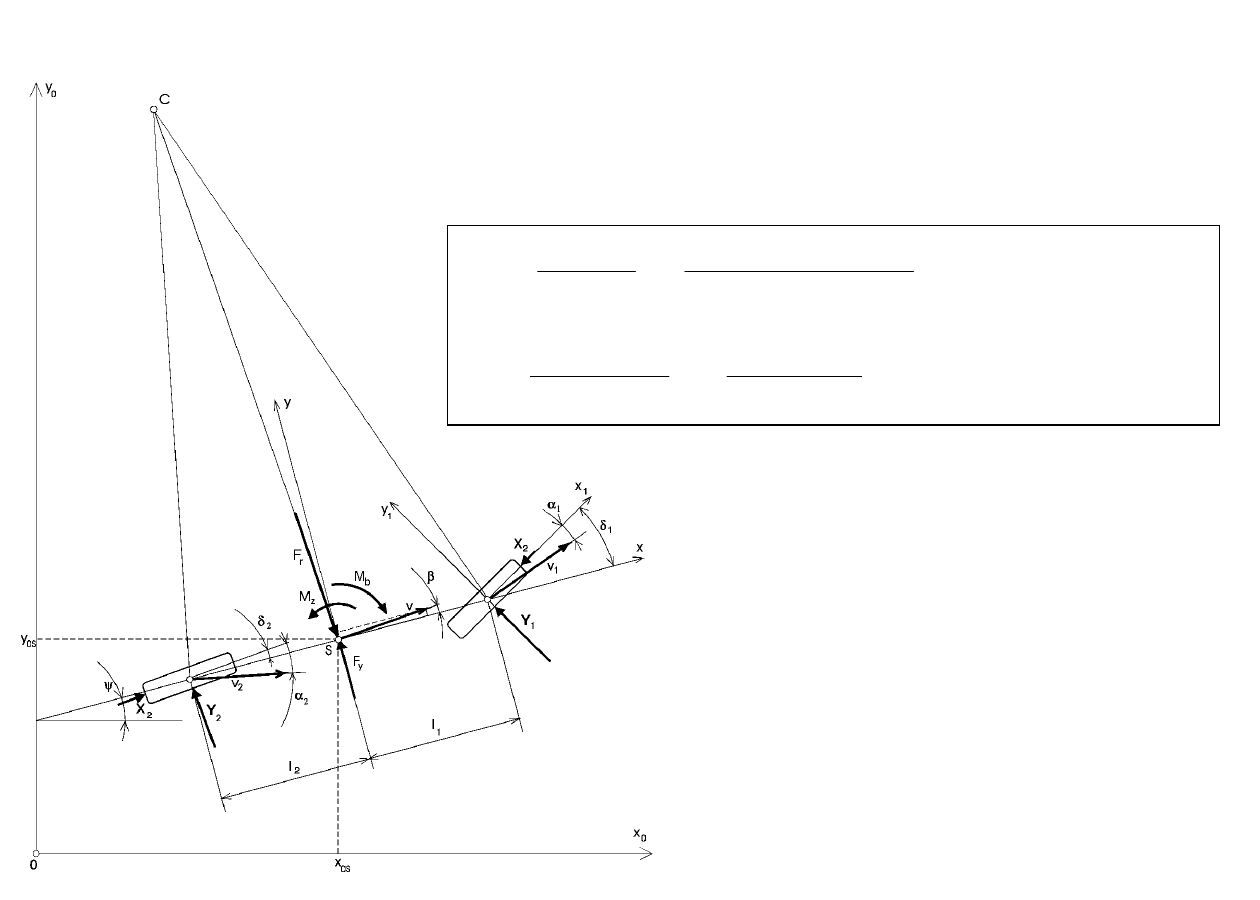
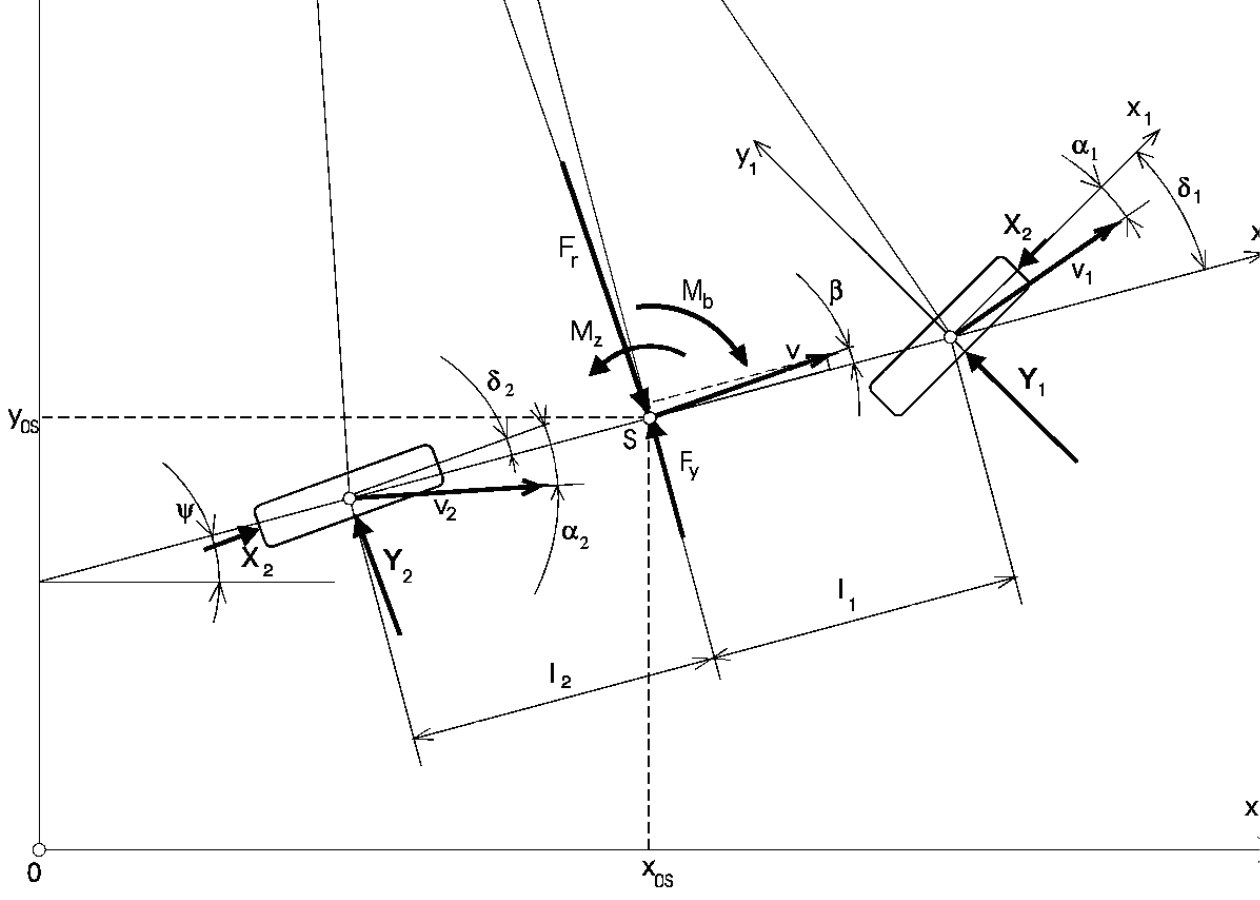
Mechanika ruchu krzywoliniowego
Zależności
dynamiczne
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
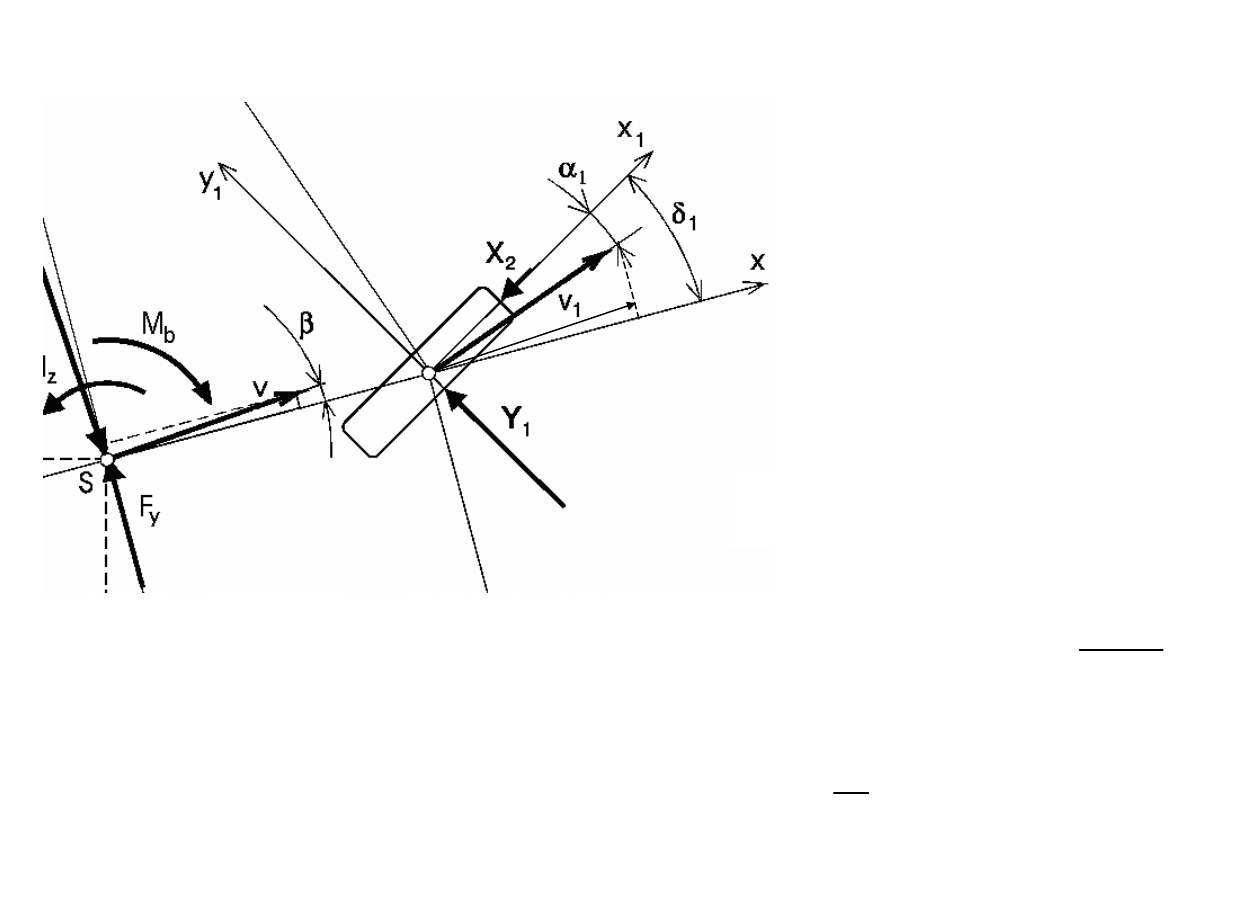
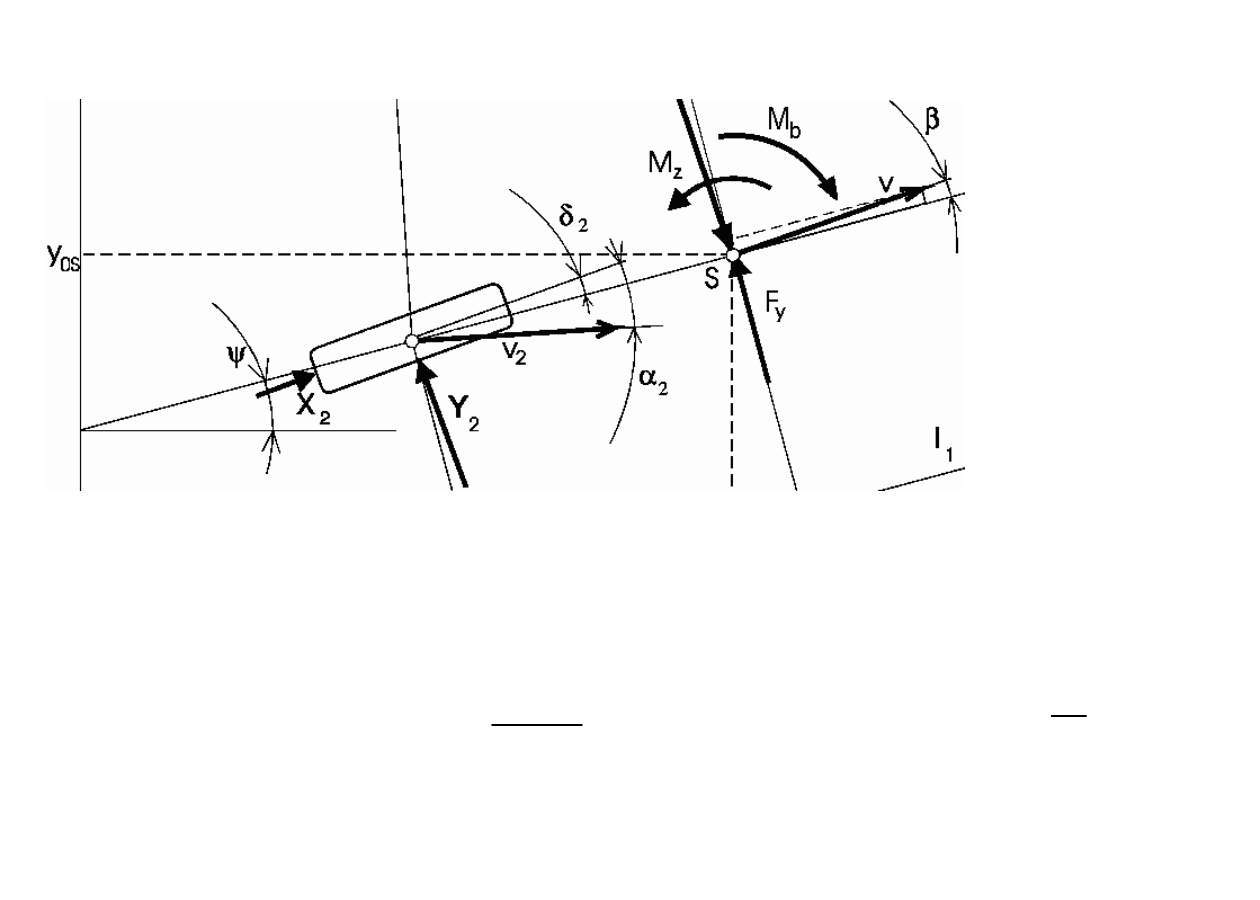
Mechanika ruchu krzywoliniowego
Mechanika ruchu krzywoliniowego

Mechanika ruchu krzywoliniowego
Równanie sił w kierunku osi y
-F
by
+ Y
1
cos
1
+ Y
2
cos
2
+ F
y
= 0
Równanie momentów
-M
b
+ Y
1
cos
1
l
1
- Y
2
cos
2
l
2
+ M
z
= 0
Siła bezwładności F
by
jest sumą rzutów na oś y siły
odśrodkowej F
r
= m v i siły bezwładności wynikającej ze
zmiany prędkości v
F
by
= m v cos + m sin = m + m
v
x
y
Równania ruchu
-m ( ) + Y
1
+ Y
2
+ F
y
= 0
-J + Y
1
l
1
- Y
2
l
2
+ M
z
= 0
y
x
Mechanika ruchu krzywoliniowego
Y
1
= K
1
α
1
x
l
1
1
1
x
y
Mechanika ruchu krzywoliniowego
Y
2
= K
2
α
2
x
l
2
2
2
x
y
Mechanika ruchu krzywoliniowego
-m ( ) + Y
1
+ Y
2
+ F
y
= 0
-J + Y
1
l
1
- Y
2
l
2
+ M
z
= 0
y
x
0
F
x
l
x
y
K
x
l
x
y
K
y
x
m
y
2
2
2
1
1
1
0
M
x
l
x
y
l
K
x
l
x
y
l
K
J
z
2
2
2
2
1
1
1
1
Mechanika ruchu krzywoliniowego
0
F
x
l
x
y
K
x
l
x
y
K
y
x
m
y
2
2
2
1
1
1
0
M
x
l
x
y
l
K
x
l
x
y
l
K
J
z
2
2
2
2
1
1
1
1
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
const
v
x
Mechanika ruchu krzywoliniowego
2
2
1
1
y
2
2
2
1
1
2
1
K
K
F
v
v
m
l
K
l
K
y
v
K
K
y
m
2
2
2
1
1
1
z
2
2
1
1
2
2
2
2
1
1
l
K
l
K
M
y
v
l
K
l
K
v
l
K
l
K
J
Dla ustalonego stanu ruchu: δ
2
= 0, δ
1
= const, = const,
= const,
y
0
,
0
y
1
1
y
2
2
2
1
1
2
1
K
F
v
v
m
l
K
l
K
y
v
K
K
1
1
1
z
2
2
2
2
1
1
2
2
1
1
l
K
M
v
l
K
l
K
y
v
l
K
l
K
Mechanika ruchu krzywoliniowego
1
1
y
2
2
2
1
1
2
1
K
F
v
v
m
l
K
l
K
y
v
K
K
1
1
1
z
2
2
2
2
1
1
2
2
1
1
l
K
M
v
l
K
l
K
y
v
l
K
l
K
Dla F
y
= 0, M
z
= 0
1
2
2
1
1
2
2
12
2
1
12
2
1
l
K
l
K
v
m
l
K
K
v
l
K
K
1
1
2
2
1
12
2
12
K
l
K
l
l
m
v
l
v
lub
Mechanika ruchu krzywoliniowego
Inaczej
zapisując
1
2
2
1
12
12
1
K
l
K
l
l
m
v
v
l
Podstawiając
R
1
v
oraz
y
a
v
1
2
2
1
12
y
12
1
K
l
K
l
l
m
a
R
l
Kąt obrotu kierownicy: δ
H
= δ
1
i
uk
; i
uk
– przełożenie układu
kierowniczego
Kąt Ackermana:
R
l
12
A
2
1
1
2
12
y
A
H
uk
K
l
K
l
l
m
a
i
1
Mechanika ruchu krzywoliniowego
2
1
1
2
12
y
A
H
uk
K
l
K
l
l
m
a
i
1
Gradient podsterowności wg ISO 4138:
y
A
y
H
uk
da
d
da
d
i
1
GS
Dla ustalonego stanu ruchu: δ
H
= const, δ
A
= const, a
y
=
const
GS
a
i
1
y
A
H
uk
2
1
1
2
12
K
l
K
l
l
m
GS
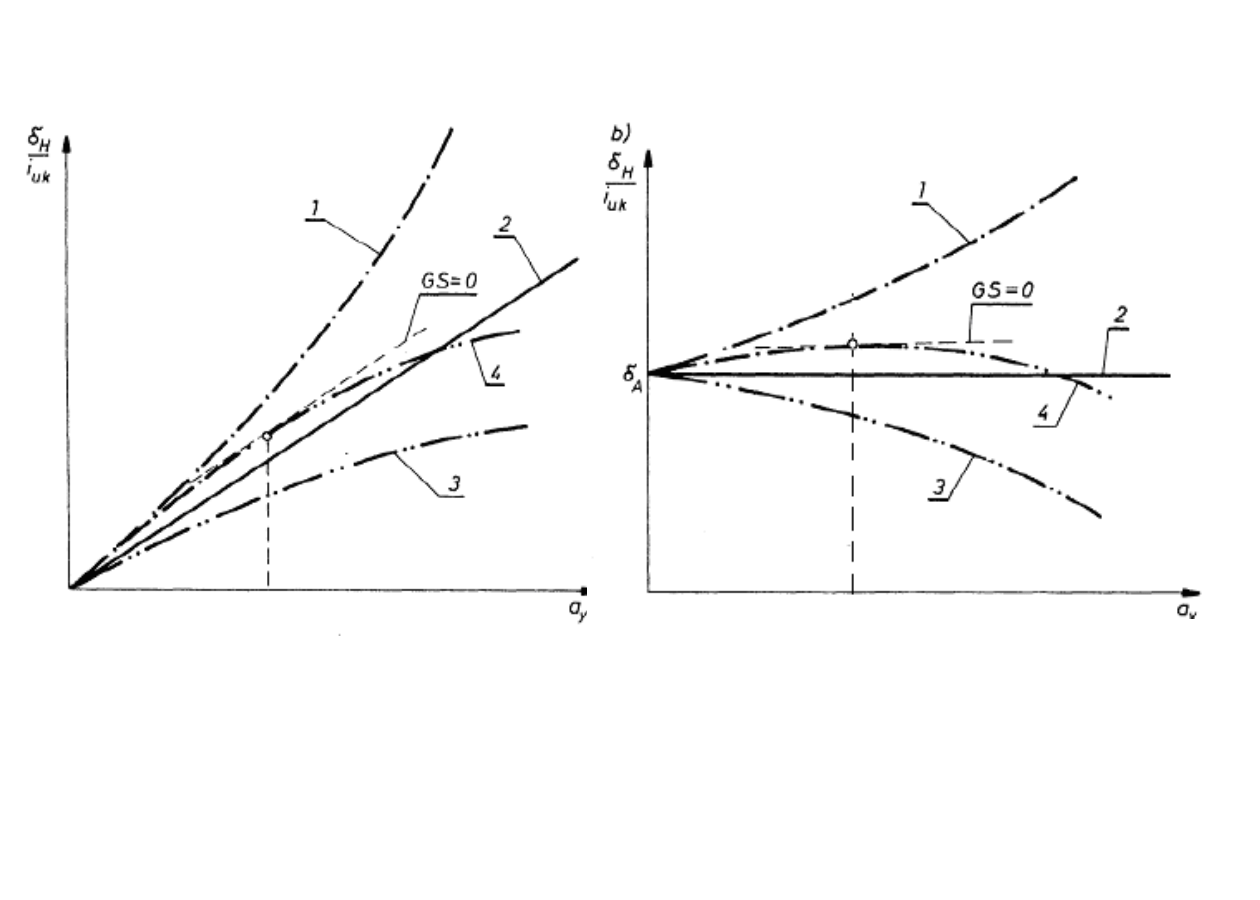
Mechanika ruchu krzywoliniowego
Ruch samochodu ze stałą
prędkością po okręgach o
różnych promieniach R
Ruch samochodu po okręgu o
stałym promieniu z różnymi
stałymi prędkościami v
1 – samochód podsterowny, 2 – neutralny, 3 – nadsterowny,
4 – samochód o zmiennej charakterystyce sterowności
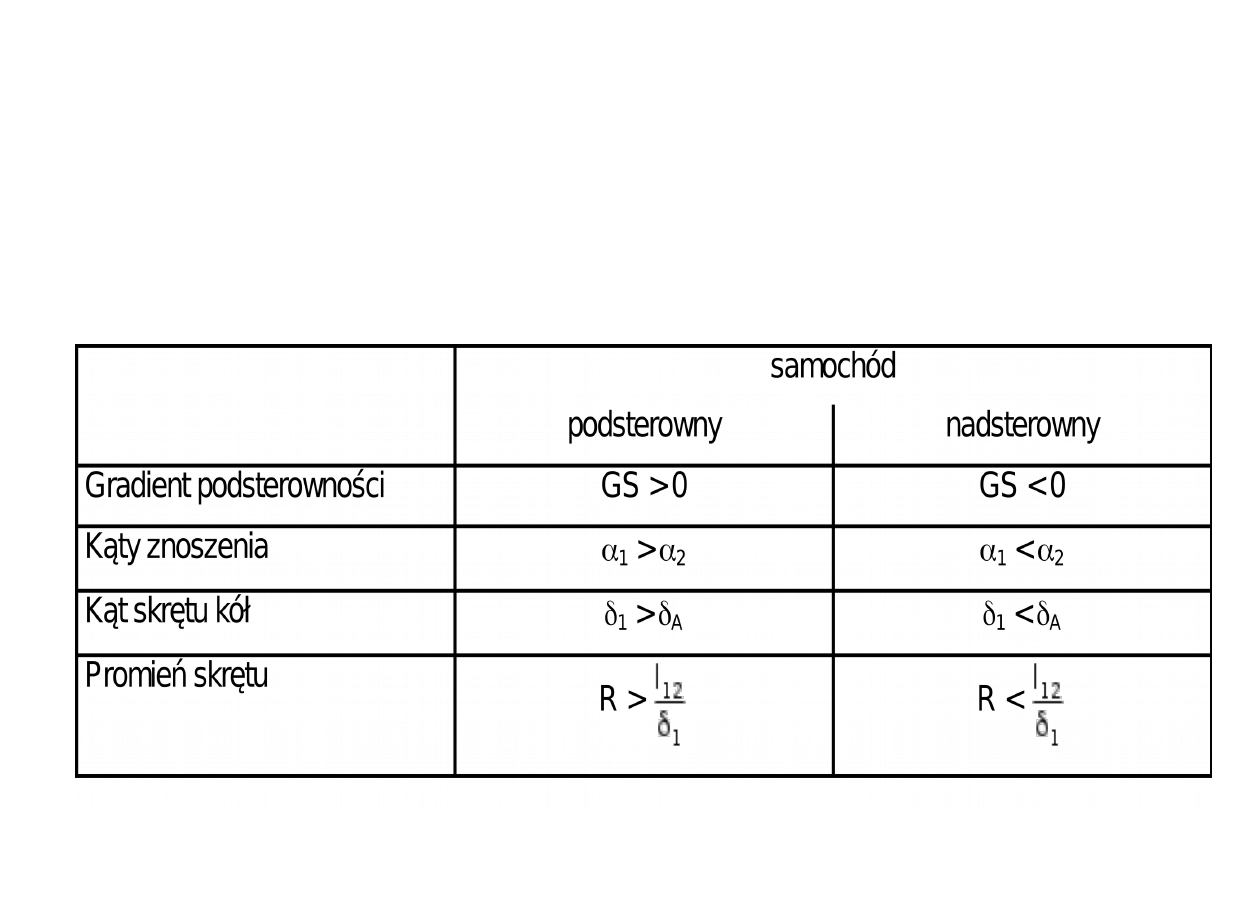
Mechanika ruchu krzywoliniowego
R >
R <
R >
R <
Porównanie zachowania się samochodu pod- i
nadsterownego w ustalonym stanie ruchu
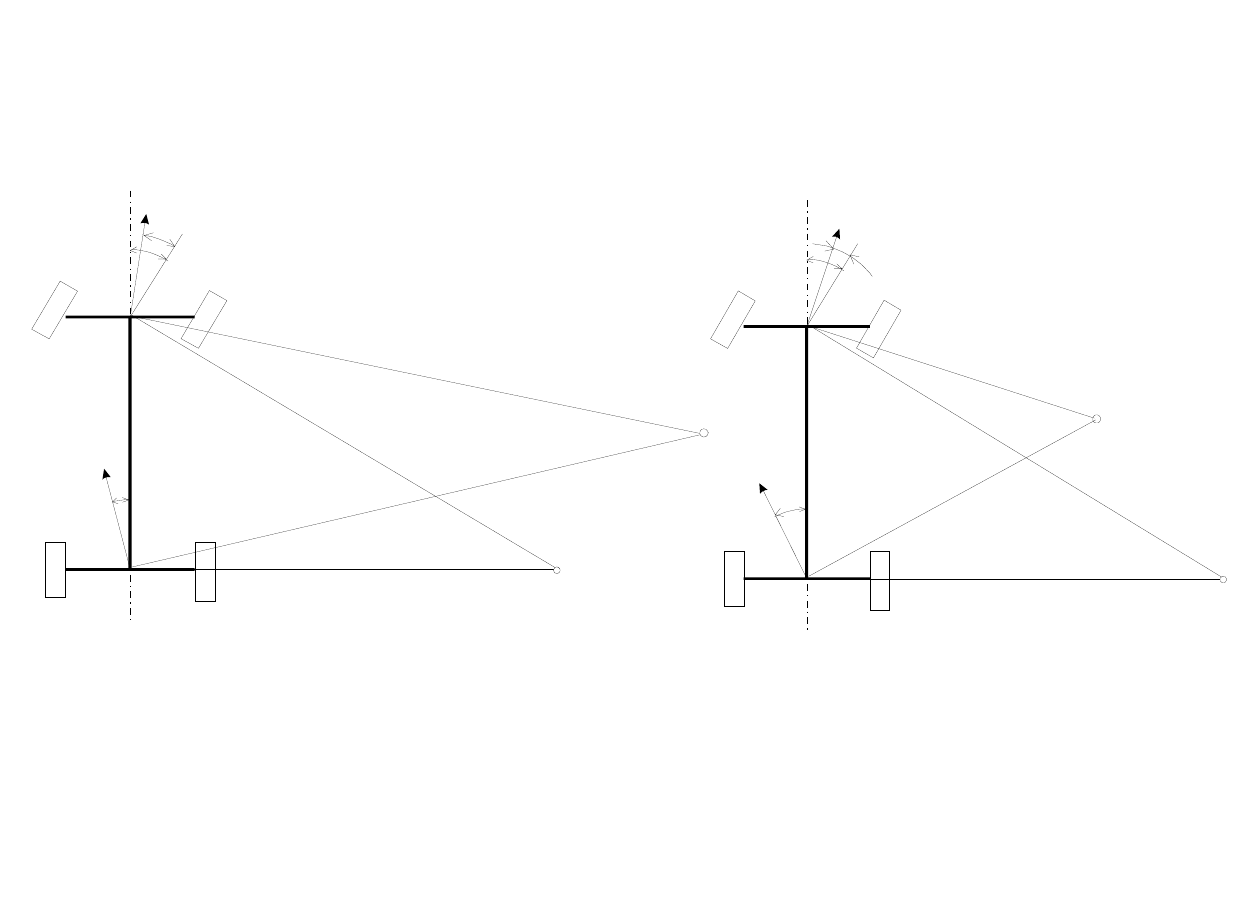
Mechanika ruchu po krzywoliniowego
Pod- i nadsterowność
δ
δ
α
1
α
1
α
2
α
2
Samochód podsterowny
α
1
> α
2
Samochód nadsterowny
α
1
< α
2
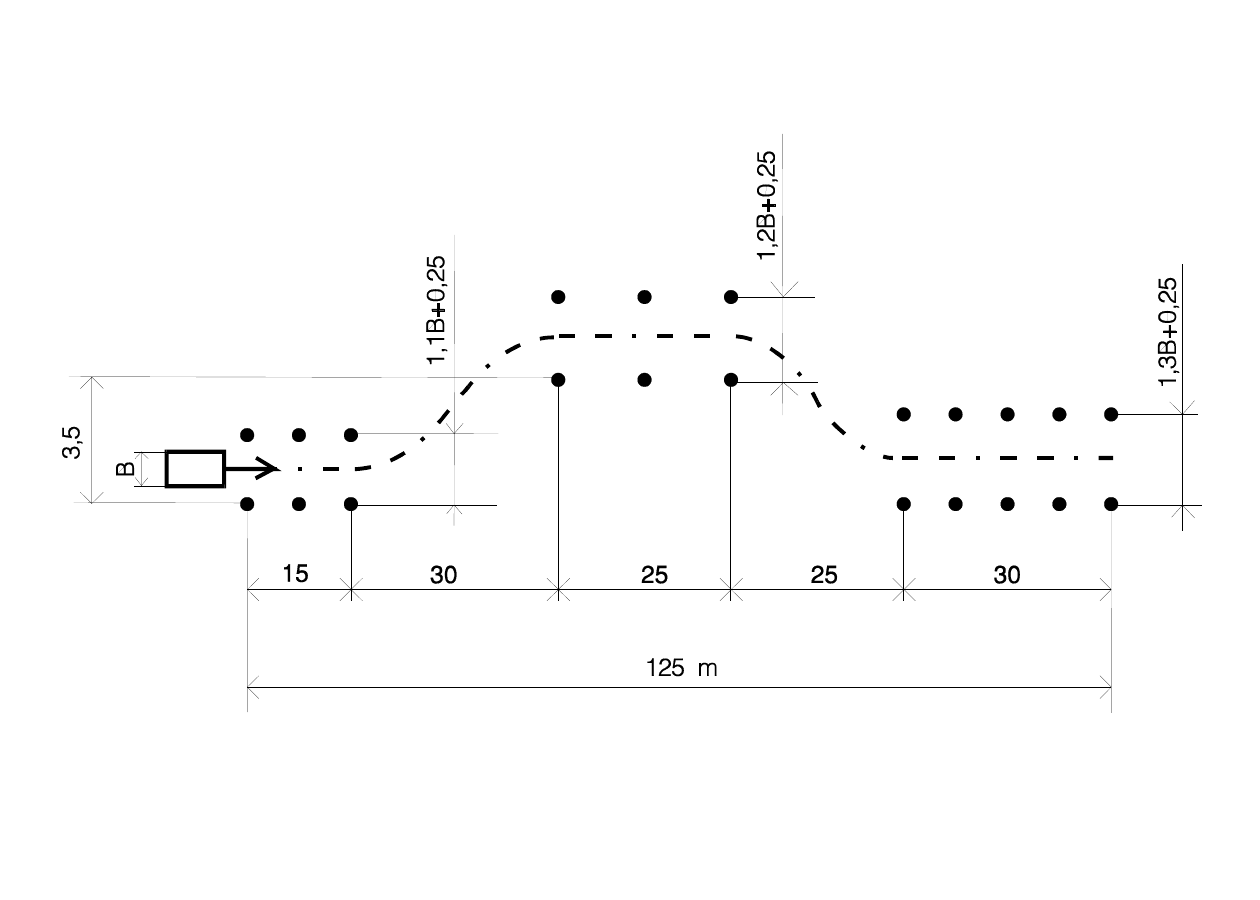
Mechanika ruchu krzywoliniowego
Tor jazdy stosowany w teście „podwójna zmiana pasa
ruchu” wg normy ISO 3888; B – szerokość samochodu
Mechanika ruchu krzywoliniowego
Zależności dynamiczne w
ruchu po okręgu
2
2
v
1
v
2
F
y
Y
1
Y
2
1
-
1
l
l
1
2
l
1 2
R
S M
O
y
2
y
a
m
v
m
R
v
m
F
2
1
12
l
R
2
1
1
2
12
y
12
k
l
k
l
l
a
m
v
l
2
1
12
R
l
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
Wyszukiwarka
Podobne podstrony:
kolos 2, TR ruch krzyw
Pojazdy ruch krzyw OgarnijTemat com
7 ruch krzyw
tr dzik rˇ¬owaty
prezentacja Ruch konsumencki
Wykł 05 Ruch drgający
ruch wektorowy
syst tr 1 (2)TM 01 03)13
Ustalony ruch przez dyfuzje gazow wg Maxwella
Prezentacja klaryfikator ruch
tr obc wykr wekt
R PSYCH RUCH
POJĘCIA CHARAKTERYZUJĄCE RUCH FALOWY
więcej podobnych podstron