
OPIS DYNAMIKI UKŁADÓW
• Modelowanie fizyczne procesu
• Modelowanie matematyczne procesu
• Uproszczenia modelu
• Linearyzacja
• Redukcja modelu
• Przekształcanie modelu
Równanie dynamiki układu
•
Własności dynamiczne wielu układów, niezależnie od tego czy są one
mechaniczne, elektryczne, cieplne, a nawet biologiczne lub ekonomiczne,
zazwyczaj mogą zostać opisane za pomocą równań różniczkowych. Ogólna
postać liniowego równania różniczkowego elementu czy układu o jednym
wejściu i jednym wyjściu jest następująca:
•
•
Skrócona postać tego równania używana przy analizie numerycznej jest
następująca:
•
•
gdzie wyrażenia w nawiasach , określają rząd pochodnej.
•
u
r
b
dt
du
r
b
r
dt
u
r
d
b
r
dt
u
r
d
b
y
m
a
dt
dy
m
a
m
dt
y
m
d
a
m
dt
y
m
d
1
1
1
1
0
1
1
1
1
1
0
czym
przy
,
0
0
a
j
r
j
j
r
u
j
b
i
m
y
m
i
i
a
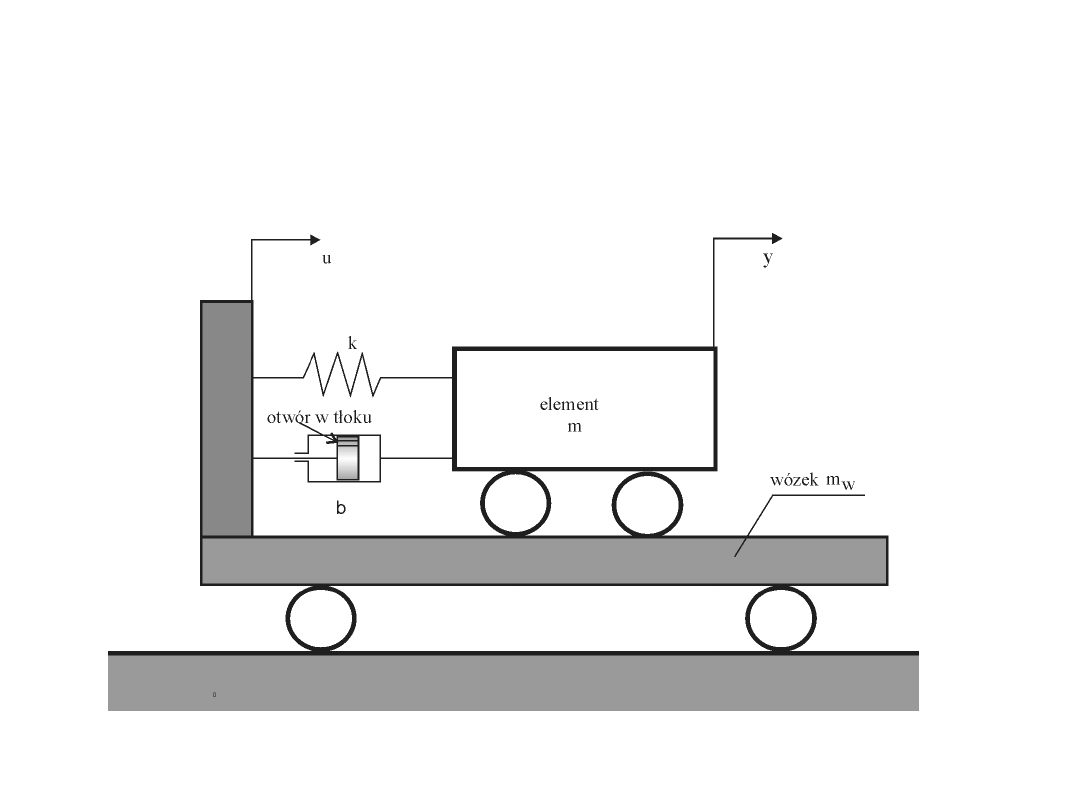
Przykład 1. Wózek z układem
drgająco‑tłumiącym
Przykład 1
•
Rozwiązanie
•
Dla rozpatrywanego układu II prawo Newtona ma postać:
•
,
•
naszym przypadku na masę działa siła sprężystości i siła tłumienia. Stosując II
prawo Newtona dla przedstawionego układu przy założeniu, że masa wózka jest
równa zeru, otrzymujemy:
•
•
.
•
Po przekształceniach:
•
•
Standardową postacią tego równania jest:
•
,
•
gdzie poszczególne współczynniki: a1, a2, b0, b1, b2 mają następujące wartości:
Opis za pomocą równania różniczkowego, zwanego w tym przypadku równaniem ruchu
układu, jest w zasadzie jedyną jednoznaczną formą opisu dynamiki układu. Jak
wiemy z kursu matematyki, aby rozwiązać równanie różniczkowe zwyczajne należy
jeszcze znać warunki początkowe.
F
a
m
2
2
(
)
d y
du dy
m
b
k u y
dt
dt dt
�
�
=
-
+
-
�
�
�
�
ku
dt
du
b
ky
dt
dy
b
dt
y
d
m
2
2
u
b
u
b
u
b
y
a
y
a
y
2
1
0
1
1
m
k
b
m
b
b
b
m
k
a
m
b
a
2
,
1
,
0
0
,
2
,
1
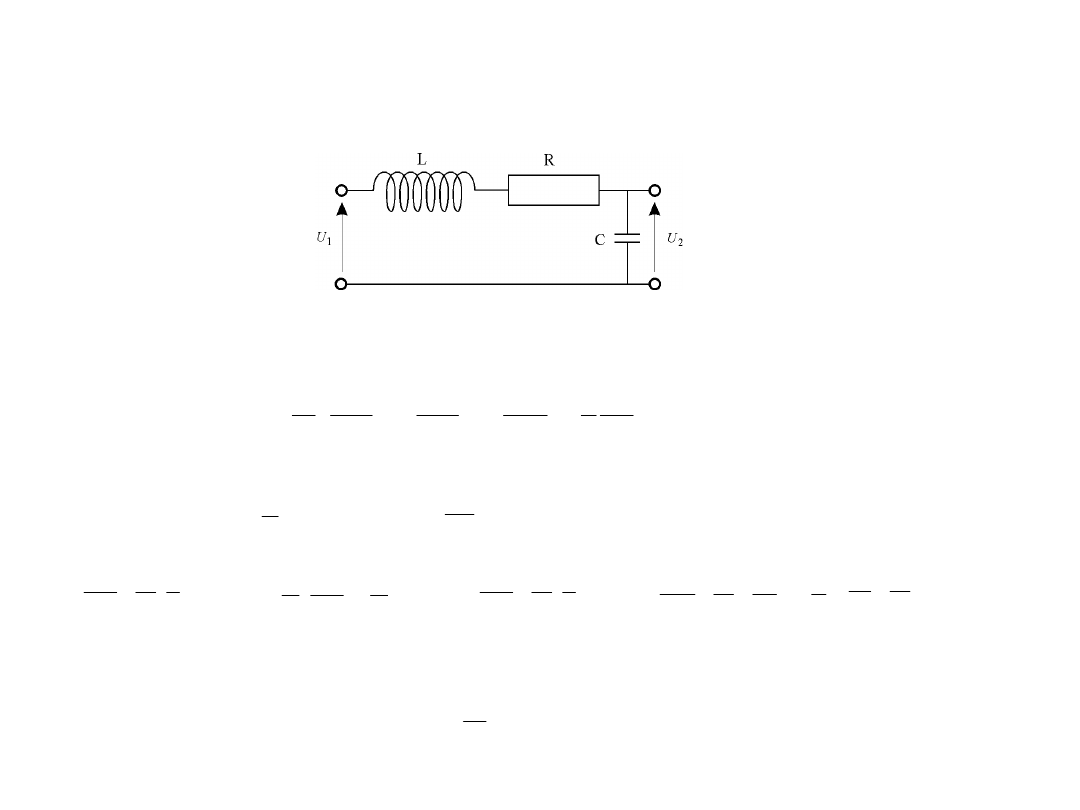
Przykład 2. Czwórnik elektryczny
•
Wyprowadzić równanie dynamiczne czwórnika elektrycznego, przedstawionego na rysunku , utworzonego z połączonych
szeregowo indukcyjności , oporności i pojemności C. Sygnałem wejściowym jest , zaś wyjściowym .
•
Rozwiązanie
•
Przy wyznaczaniu równań można stosować równania Lagrange’a:
•
•
Za współrzędną uogólnioną w tym przypadku przyjmuje się ładunek kondensatora . Wymuszeniem zewnętrznym
układu jest tu sygnał wejściowy . Energia kinetyczna, potencjalna i moc rozproszona wyrażają się wzorami:
•
Stąd składniki równania Lagrange’a mają postać:
•
,
•
,
•
,
.
•
Jeśli wstawimy otrzymane wyrażenia do równania Lagrange’a, to równanie opisujące dynamikę czwórnika
elektrycznego LRC będzie miało postać:
•
.
2
2
q
L
k
E
t
X
y
P
y
E
y
E
y
E
dt
d
i
i
i
p
i
k
i
k
2
1
2
2
1
q
C
p
E
2
q
R
P
q
L
q
L
q
y
k
E
2
2
q
L
q
L
dt
d
y
k
E
dt
d
0
2
2
q
L
q
y
k
E
C
q
C
q
q
y
p
E
2
2
q
R
q
R
q
y
P
2
2
1
1
Lq Rq
q U
C
+
+
=
&&
&

MODELOWANIE OBIEKTÓW
STEROWANIA
Automatyka wytworzyła własny aparat pojęciowy i własną metodykę
rozwiązywania problemów analizy i syntezy układów sterowania.
Istotną rolę odgrywa odpowiednie przygotowanie modelu
matematycznego zarówno obiektu, układu otwartego, jak i układu
zamkniętego na potrzeby tej metodyki. W tym celu przekształca się
równania dynamiczne do jednej z wybranych postaci modelu układu. W
niniejszym podręczniku będziemy posługiwali się następującymi
modelami matematycznymi:
---schematy blokowe,
---modele w przestrzeni stanu,
---modele operatorowe.
W tym rozdziale omówimy kolejno te modele i pokażemy
podstawowe związki pomiędzy nimi. Oprócz wymienionych modeli
istotną rolę w automatyce ogrywają inne modele, np. model ARMAX,
model wykorzystujący parametry i łańcuchy Markowa, grafy i sieci,
automat skończony, itd.

Wiadomości podstawowe o
schematach blokowych
• Inżynierowie projektujący układy dynamiczne często stosują do
wizualizacji tych układów różnego rodzaju schematy. Schemat
jest zazwyczaj bardziej komunikatywny niż równania
matematyczne opisujące badany lub projektowany układ
sterowania. Budowanie schematów zazwyczaj zaczynamy od
podzielenia układu na mniejsze podukłady. Następnie rysujemy
schemat ukazując połączenia pomiędzy podukładami.
• Podział na podukłady może odbywać się na różnych poziomach.
Jeśli badany układ jest bardzo rozbudowany, to często buduje
się schematy w sposób zagnieżdżony. To znaczy, dzielimy układ
na duże podukłady i rysujemy połączenia pomiędzy nimi. Tak
wydzielone podukłady rysujemy na osobnych schematach
dzieląc je dalej na podpodukłady. Postępując tak kolejno
dochodzimy do takiego poziomu schematów, że te detalicznie
opisują pewne fragmenty układu. Takim podejściem do
modelowania układów dynamicznych charakteryzuje się na
przykład program SIMULINK.
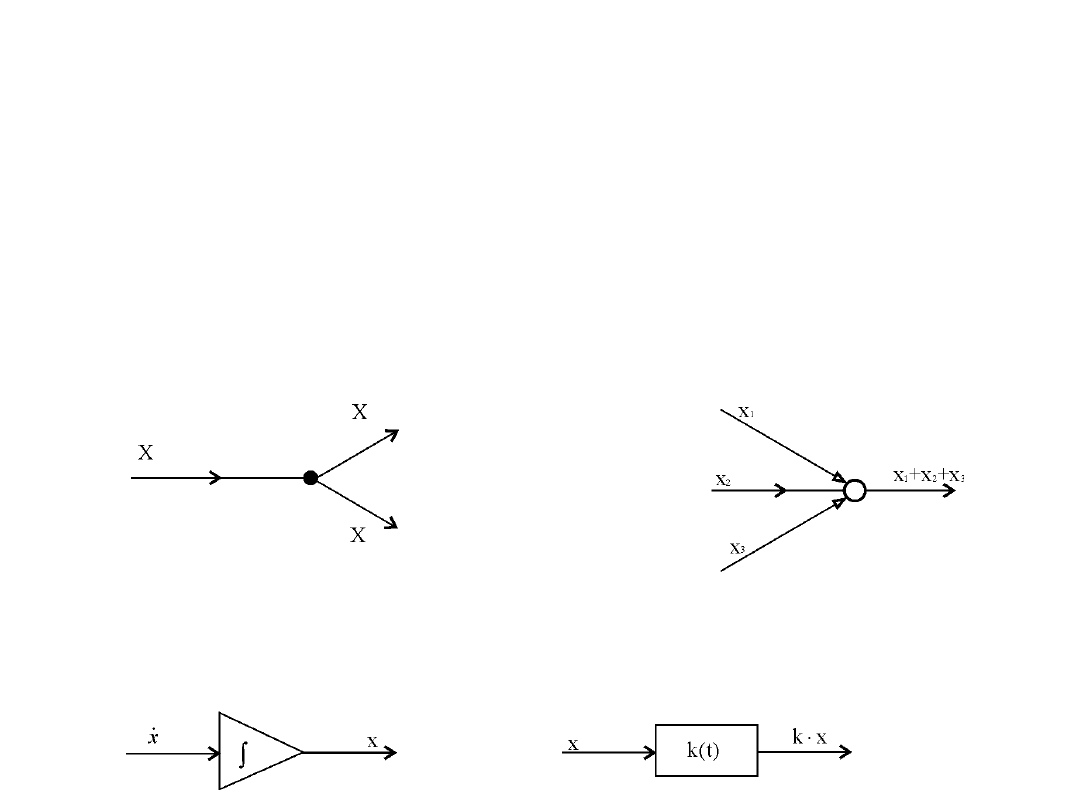
Elementy schematów blokowych
• Jednym z możliwych schematów jest schemat blokowy. W schemacie
blokowym związki pomiędzy zmiennymi w układzie liniowym można wyrazić
jedynie przez cztery elementarne podukłady (zwane popularnie
elementami):
– Element informacyjny – reprezentowany przez kropkę.
– Element sumacyjny – reprezentowany przez okrąg.
– Element całkujący – reprezentowany przez trójkąt.
– Element przetwarzający (wzmacniający) - reprezentowany przez kwadrat lub
prostokąt.
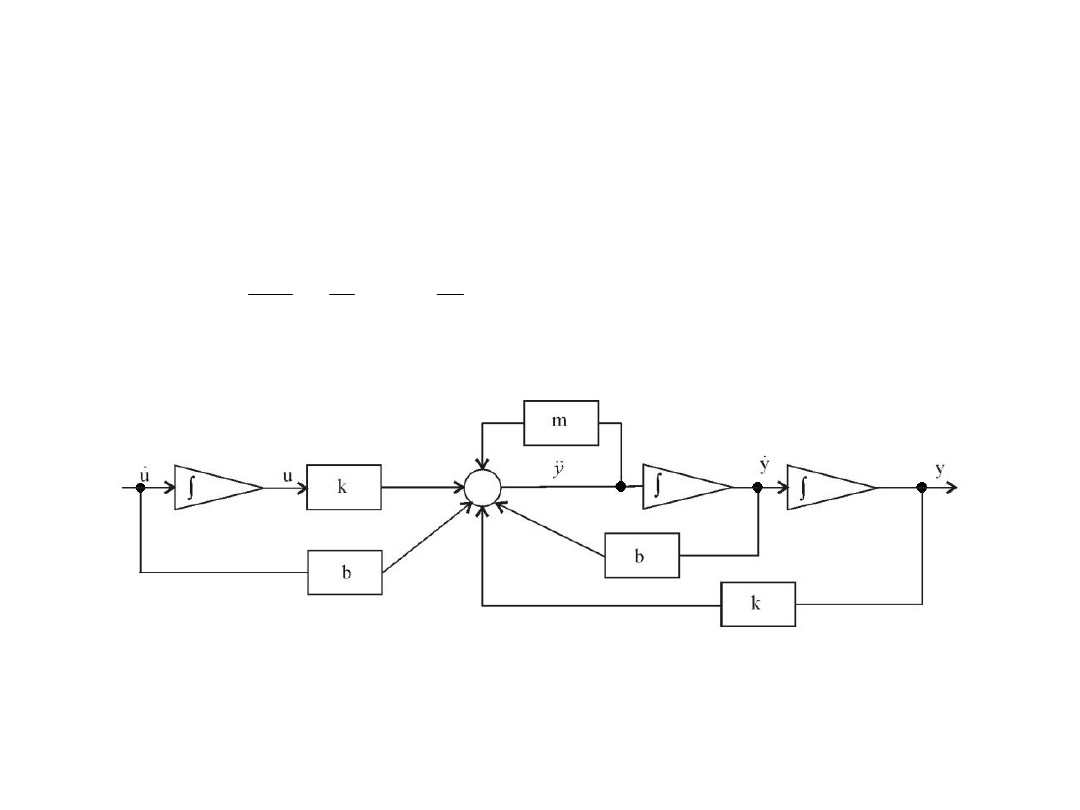
Przykład 3. Wózek z układem
drgająco‑tłumiącym
•
Narysować schemat blokowy układu opisanego w przykładzie 1.
•
Rozwiązanie
•
Równanie dynamiczne opisujące ruch masy przymocowanej poprzez sprężynę i tłumik z
ruchomym wózkiem w następującej postaci:
•
.
•
Na bazie tego równania narysujemy schemat blokowy. Jako regułę przyjmuje się, że dla
każdego równania rysujemy jeden element sumacyjny. Jeśli wyjściem z integratora jest
pochodna, to oznacza, że wejściem jest pochodna drugiego rzędu, itd.
•
Jak podkreślono w przykładzie 1, sygnałem wejściowym jest sygnał (opisujący ruch wózka),
natomiast sygnałem wyjściowym jest sygnał y (opisujący ruch masy). Niestety, tu jako
sygnał wejściowy mamy pochodną sygnału u, gdyż nie jesteśmy w stanie narysować innego
schematu bezpośrednio na podstawie równania ruchu. Poprawne narysowanie schematu jest
możliwe w przypadku zastosowania modelu operatorowego lub modelu przestrzeni stanu.
ku
dt
du
b
ky
dt
dy
b
dt
y
d
m
2
2

Pojęcie stanu układu
•
Stan układu czy jego elementów składowych jest jednym z najważniejszych pojęć w teorii
układów dynamicznych i teorii sterowania. Stan charakteryzuje układ odznaczający się
pewnego rodzaju pamięcią, tzn. stan zawiera informację zakumulowaną z całej przeszłości
układu aż do danej chwili oraz nie może ulegać nagłym skokowym zmianom.
•
Pojęcie stanu wyjaśnimy na prostym przykładzie zbiornika z cieczą. Zawartość zbiornika
(objętość cieczy) mówi nam wszystko o jego stanie, a więc jest to zmienna stanu tego
zbiornika. Wiedząc bowiem, ile jest cieczy w zbiorniku, nie musimy już pamiętać o tym, w jaki
sposób i kiedy ta ciecz wpłynęła do zbiornika – zmienna stanu „pamięta” całą historię
dopływów i odpływów ze zbiornika i bilansuje tę historię. Dopływ lub odpływ można uznać za
zmienną sterującą zbiornika; łatwo dostrzec, że ustalając np. określony dopływ, mierzony w
jednostkach objętości na jednostkę czasu, regulujemy stan, ale nie możemy go zmienić nagle
– co najwyżej wpływamy na prędkość zmian stanu. Zauważmy również, że znajomość
aktualnego stanu jest niezbędna, jeśli interesujemy się przyszłym zachowaniem układu – np.,
jeśli chcemy określić, w jaki sposób zbiornik opróżni się z cieczy przy swobodnym jej
wypływie. Stan zbiornika jest jego zmienną wewnętrzną, bowiem zawartość zbiornika można
określić tylko pośrednio, np. mierząc poziom cieczy w zbiorniku lub ciśnienie na jego dnie. Przy
bezpośrednim pomiarze objętości konieczne byłoby całkowite opróżnienie zbiornika. Poziom
lub ciśnienie można oczywiście uznać za zmienne wyjściowe; nie zawsze są one
proporcjonalne do stanu. W tym przypadku mogą zależeć od kształtu zbiornika.
•
Przykład zbiornika uwidacznia kilka istotnych spraw. Najważniejszą jest spostrzeżenie, że
wybór zmiennej stanu jest w gruncie rzeczy arbitralny.. Drugie spostrzeżenie dotyczy
potencjalnych ograniczeń fizycznych stanu, np. zbiornik może zostać przepełniony lub
całkowicie opróżniony. Oznacza to, że stan może (choć nie musi) podlegać pewnym
ograniczeniom fizycznym. Zauważmy wreszcie, że znajomość stanu daje nam bardzo wiele,
ale jeszcze więcej wiedzielibyśmy o układzie, gdybyśmy znali związki zmiennej stanu z innymi
ważnymi zmiennymi. Można więc przypuszczać, że w opisie układu (w jego modelu
matematycznym) kluczową rolę będzie odgrywał związek (np. równanie) rządzący
zachowaniem się zmiennej stanu.

Zbiornik
•
W przykładzie zbiornika można taki związek podać bardzo łatwo w postaci równania różniczkowego:
•
•
w którym x(t) oznacza wartość zmiennej stanu w danej chwili (objętość cieczy w [m3]), zaś u(t) –
wypadkowy dopływ w danej chwili (w [m3 s-1]). Rozwiązanie powyższego równania ma postać:
•
•
lub może przyjąć postać alternatywną:
•
•
gdzie zmienna jest zmienną całkowania.
•
Pierwsze z tych wyrażeń pokazuje, że zawartość zbiornika jest całką wypadkowego dopływu, liczoną przez
cały czas jego istnienia (w czasie zbiornik był pusty). Drugie wyrażenie jest bardziej dogodne, ponieważ
podkreśla postulowaną przez nas właściwość zmiennej stanu. Jeśli rozpatrywany jest przebieg zmian
zawartości zbiornika od chwili: , to wówczas konieczna jest znajomość stanu , która zawiera pełną informację
o jego przeszłości. Dalsze zachowanie zmiennej stanu określa całka wielkości , liczona od chwili początkowej
0 do bieżącej t, przy czym dla , i stan pozostałby stały („zapamiętany”) również w następnych chwilach
czasu t.
•
Analogiczne właściwości do omówionego zbiornika miałyby takie układy, jak: kondensator ładowany prądem
elektrycznym (zmienną stanu jest spadek napięcia lub ładunek zgromadzony na kondensatorze), kalorymetr
bilansujący ciepło doprowadzone i odprowadzone, zbiornik ciśnieniowy powietrza. Podobnie można
rozpatrywać magazyn towaru lub zasób finansowy. Wspólną cechą wymienionych układów jest fakt
magazynowania (zachowania, pamiętania, akumulowania) pewnej wielkości fizycznej – masy, ładunku,
energii, ciepła, kapitału przez elementy, które dalej będziemy nazywali elementami całkującymi. Wyjścia
elementów całkujących nazywane są zmiennymi stanu, ponieważ mogą być rozważane jako zmienne, które
definiują stan wewnętrzny systemu.
)
(
)
(
t
u
dt
t
dx
t
d
u
t
x
)
(
)
(
t
d
u
x
t
x
0
)
(
)
0
(
)
(
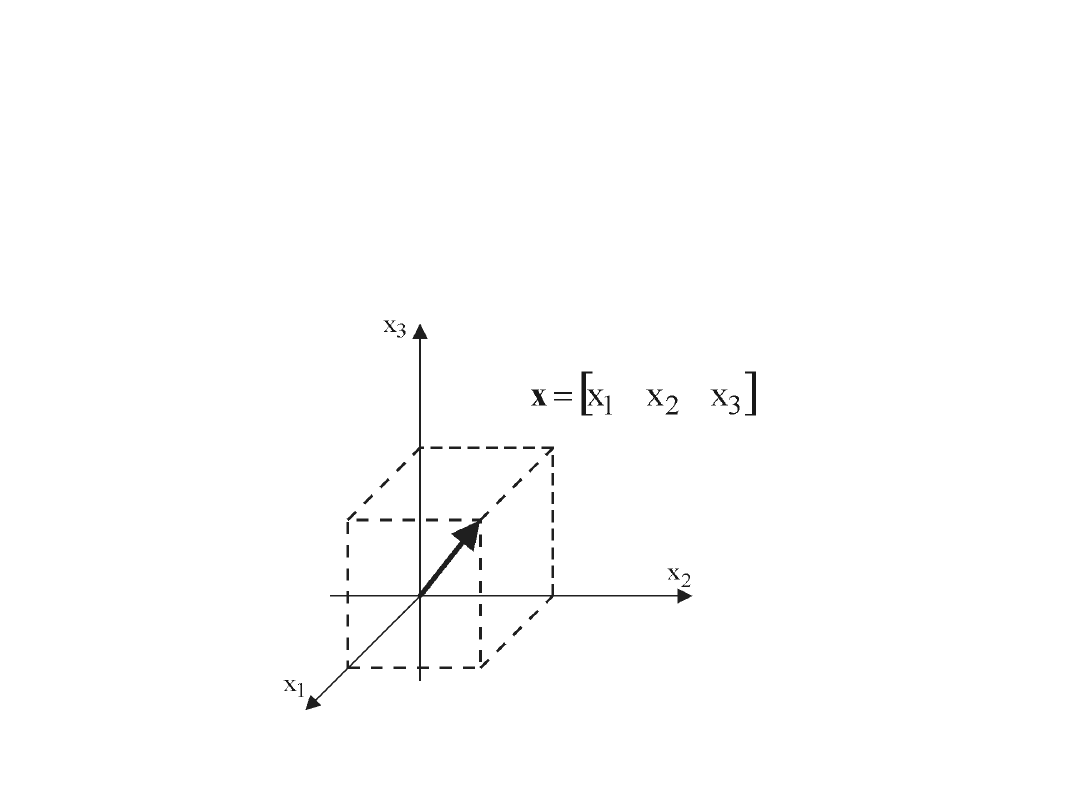
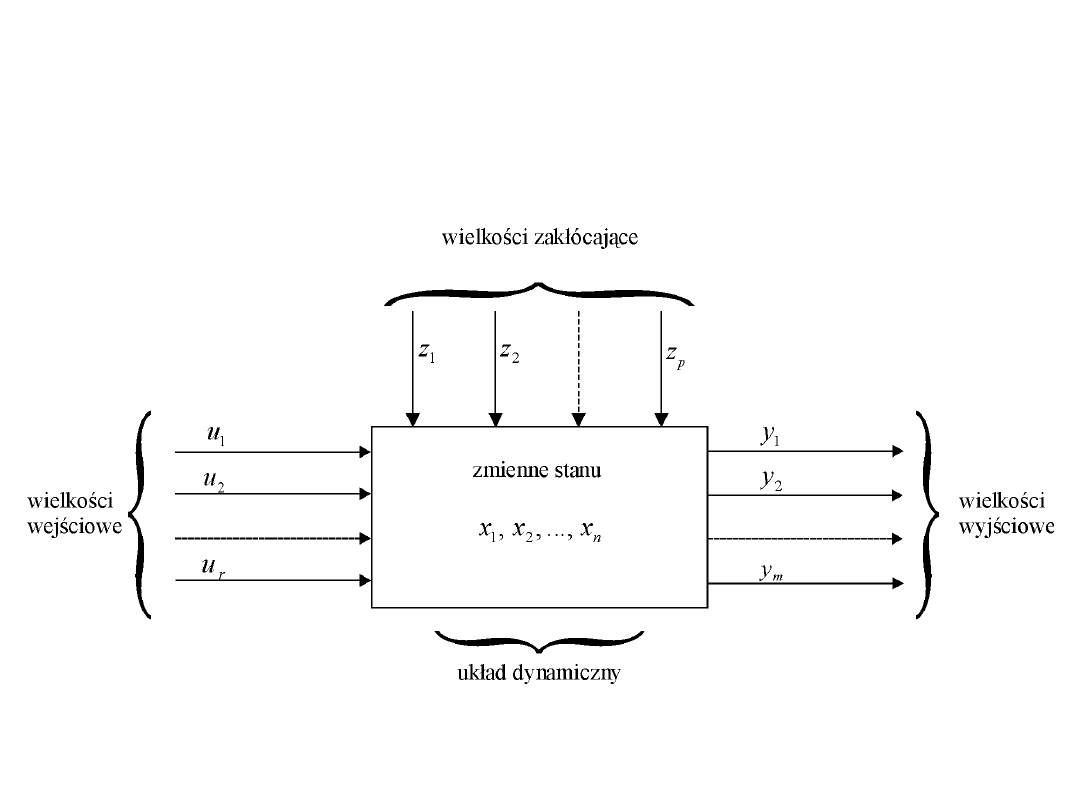
Przestrzeń stanu
Liczba zmiennych stanu jest równa liczbie niezależnych elementów magazynujących (lub niezależnych
wielkości magazynowanych). Można to interpretować w taki sposób, że stan ma postać wektora,
określonego w
–wymiarowej przestrzeni stanów, gdzie n oznacza liczbę zmiennych stanu. Osiami (współrzędnymi)
przestrzeni stanów są więc poszczególne współrzędne (zmienne) stanu. Każdy punkt przestrzeni
stanów reprezentuje określony stan rozumiany jako zbiór wartości wszystkich zmiennych stanu
układu. Można więc zapisać symbolicznie wektor stanu
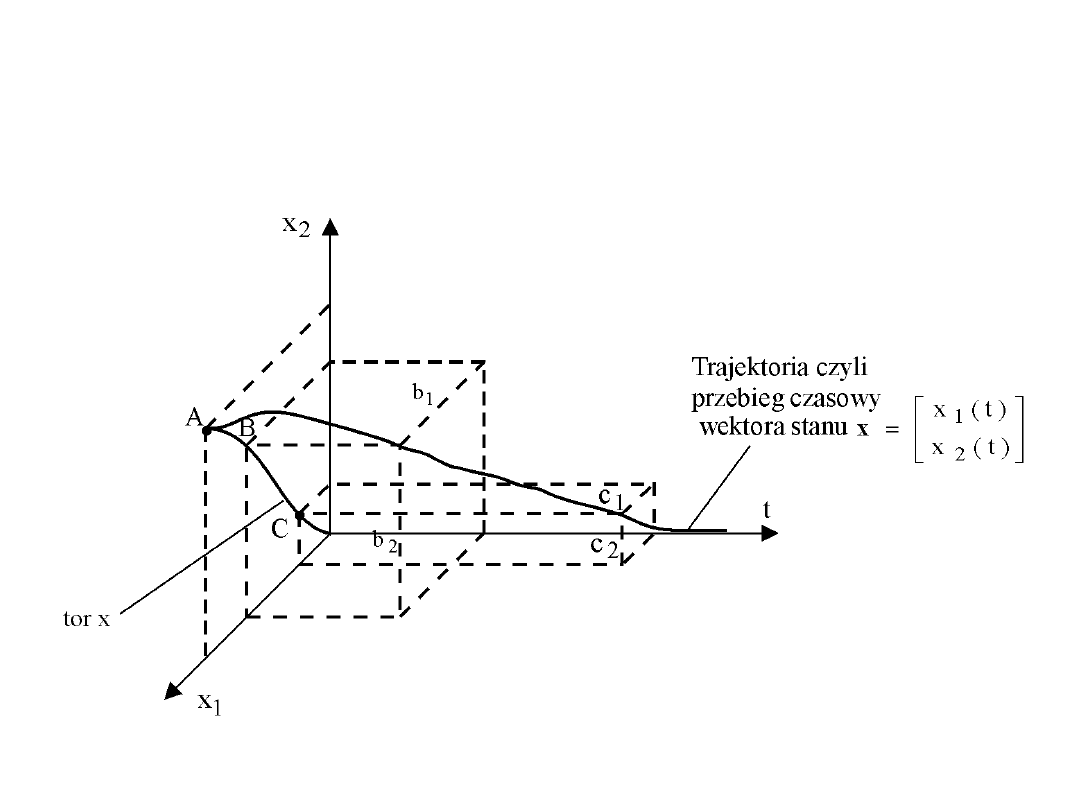
Trajektoria i tor
Sygnały w układzie dynamicznym

Równania stanu
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
)
(
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
2
)
(
2
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
1
)
(
1
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
m
g
t
m
y
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
g
t
y
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
g
t
y
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
)
(
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
2
)
(
2
)
;
2
1
;
...,
,
2
,
1
;
...,
,
2
,
1
(
1
)
(
1
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
n
f
t
n
x
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
f
t
x
t
p
...,z
,
z
,
z
r
u
u
u
n
x
x
x
f
t
x
t
f
t
,
,
,
z
u
x
x
t
g
t
,
,
,
z
u
x
y
t
t
t
t
Ez
Bu
Ax
x
t
t
t
t
Fz
Du
Cx
y
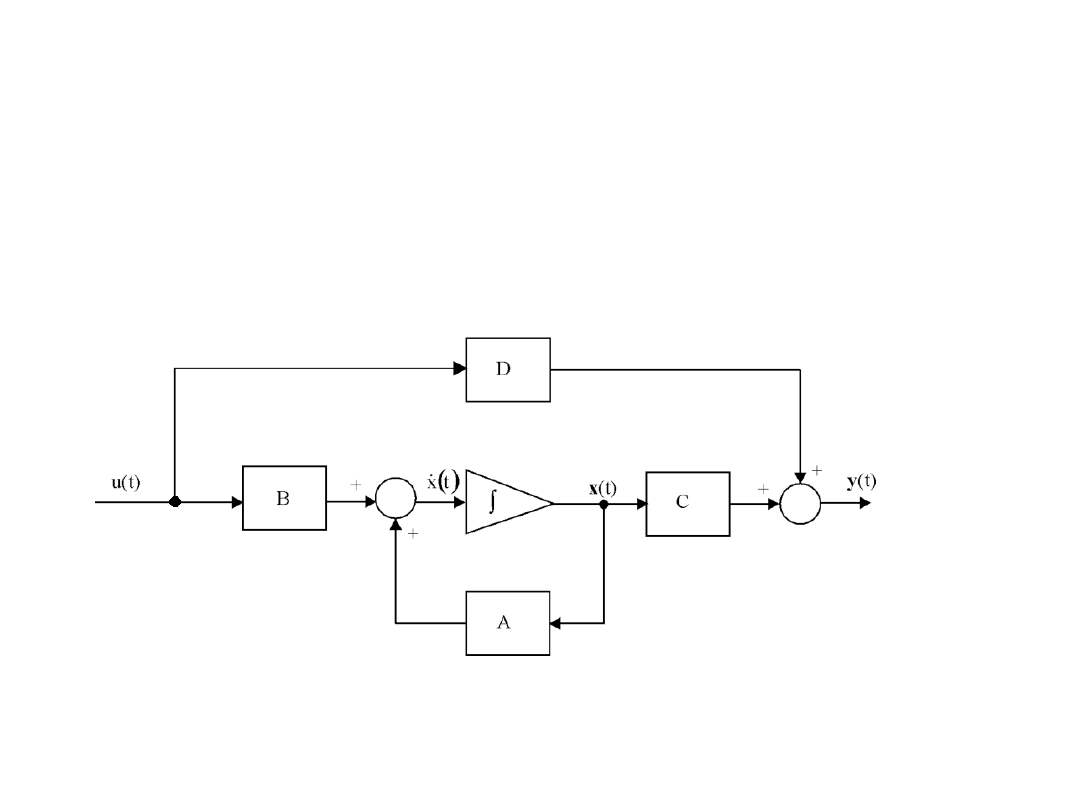
Schemat modelu układu w przestrzeni
stanu
t
t
t
Bu
Ax
x
t
t
t
Du
Cx
y

Przykład 4. Obwód elektryczny
.
,
,
u
C
u
y
i
dt
C
du
C
dt
di
L
Ri
C
u
u
u
L
x
L
R
x
L
x
x
C
x
1
2
1
1
2
2
1
1
u
x
y
1
1
1
2
2
1
0
0
1
1
x
x
d
C
u
x
x
R
dt
L
L
L
�
�
-
� �
�
�
� �
� � � �
=
+
�
�
� �
� � � �
� �
� �
�
�
-
� �
�
�
�
�
u
x
x
y
1
2
1
0
1
1
;
0
1
;
1
0
;
1
1
0
D
C
L
B
L
R
L
C
A

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
Wyszukiwarka
Podobne podstrony:
Automatyka- Identyfikacja liniowych elementow automatyki, II Informatyka
Automatyka II 1
automaty II kolos pdf
Automatyka II 10
podstawy regulacji automatycznej ii
ĆWICZENIA AUTOMATY II KOŁO doc
Automatyka II 1
wstęp i podstawowe informacje, Automatyka i Robotyka, Semestr II, Ekologia i zarządzanie środowiskie
SPRAWOZDANIE PARAMETRY, PWr, Automatyka i Robotyka, II semestr, Miernictwo 2, Laboratorium
L.2 Zasady drgania, PWr, Automatyka i Robotyka, II semestr, Fizyka 1.1A Radosz, Ćwiczenia
sciaga karkt 3, Automatyka i Robotyka, Semestr II, Ekologia i zarządzanie środowiskiem
sprawozdanie na elektre 1, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
T5PEL, Automatyka i robotyka air pwr, II SEMESTR, Podstawy elektroniki
Aktualne poziomy emisji i zużycia rtęci, Automatyka i Robotyka, Semestr II, Ekologia i zarządzanie ś
Automatyzacja zadania cz II id Nieznany
Wykład VIII Przykłady kodowania automatów asynchronicznycvh II
Systemy pomiarowo-regulacyjne, STUDIA PŁ, TECHNOLOGIA ŻYWNOŚCI I ŻYWIENIA CZŁOWIEKA, ROK II, SEM 3,
więcej podobnych podstron