
NAPĘDY ROBOTÓW
PRZEMYSŁOWYCH
6.1. Przeznaczenie
napędów i zakres ich
działania
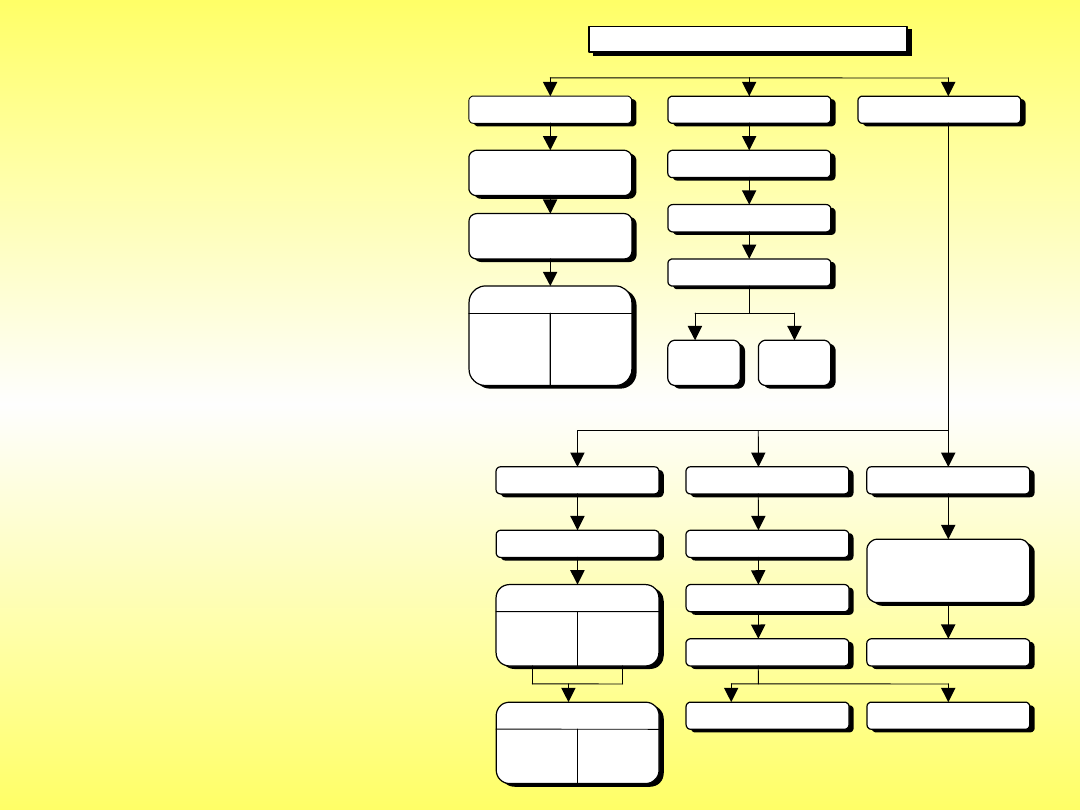
NAPĘDY ROBOTÓW PRZEMYSŁOWYCH
silnik prądu stałego
komutato- bezkomuta-
rowy rowy
silnik skokowy
silnik synchroniczny
silnik asynchroniczny
zasilacz prądu stałego
tyrystorowy tranzystoro-
wy
falownik
regulator
układ prostowniczy
regulator
skokowy
prądu przemiennego
prądu stałego
siłowniki
liniowe
obrotowe
mięśniowe
wahadłowe
zasilacz hydrauliczny
serwozawór
elementy sterujące
(zawory)
układ przygotowania
powietrza
regulator
elektryczny
elektrohydrauliczny
pneumatyczny
siłownik
liniowy
silnik
obrotowy
impulsowy
zasilacz
elektroniczny
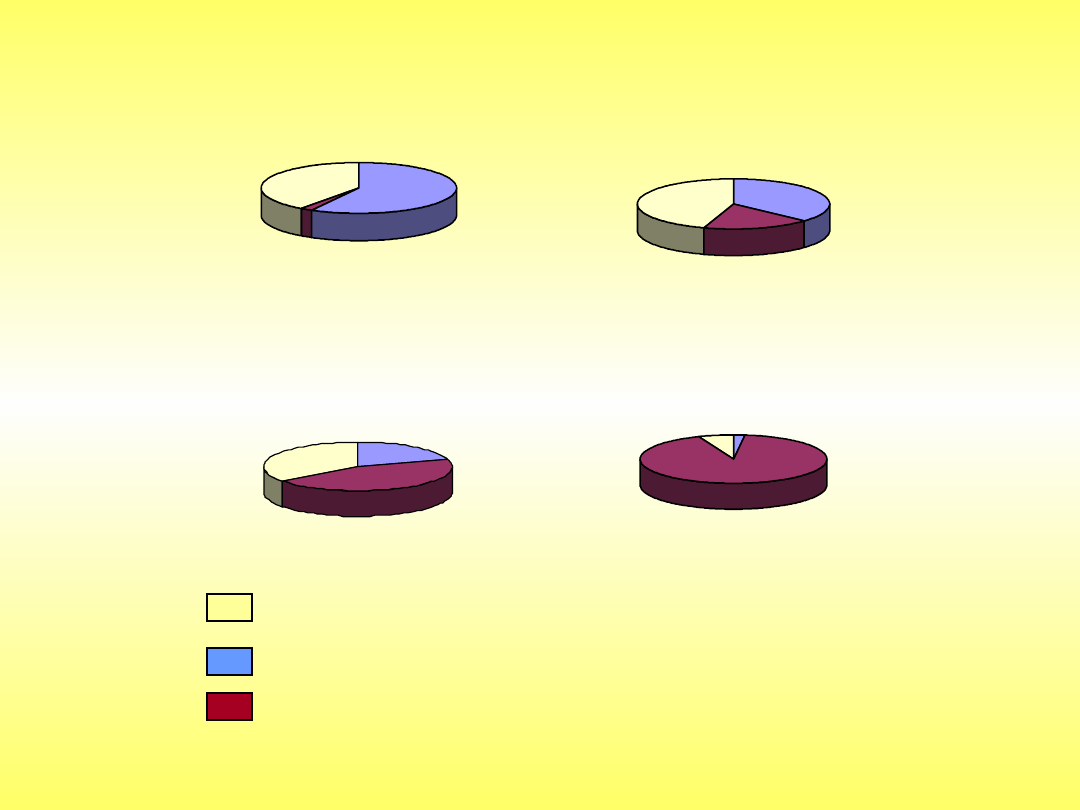
Rok 1970
58%
2%
40%
Rok 1980
37%
18%
45%
Rok 1990
20%
45%
35%
Rok 2000
2%
92%
6%
Rys. 6.2. Zastosowanie w robotach różnych napędów w ostatnich trzydziestu
latach XX wieku
napęd pneumatyczny
napęd hydrauliczny
napęd elektryczny
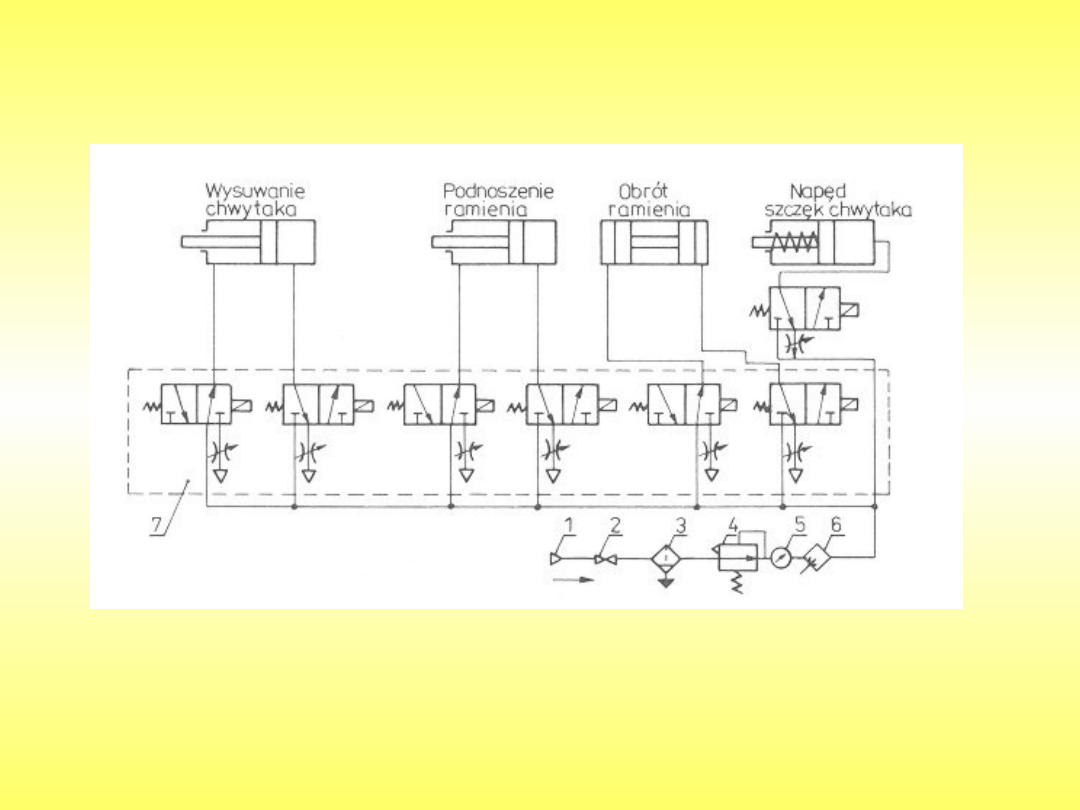
6.2. Napędy pneumatyczne
Rys. 6.3. Schemat pneumatycznego napędu robota; 1–króciec
wlotu powietrza, 2–zawór odcinający, 3–oddzielacz wilgoci, 4–
zawór redukcyjny, 5–manometr, 6–smarownica, 7–zespół zaworów
rozdzielających
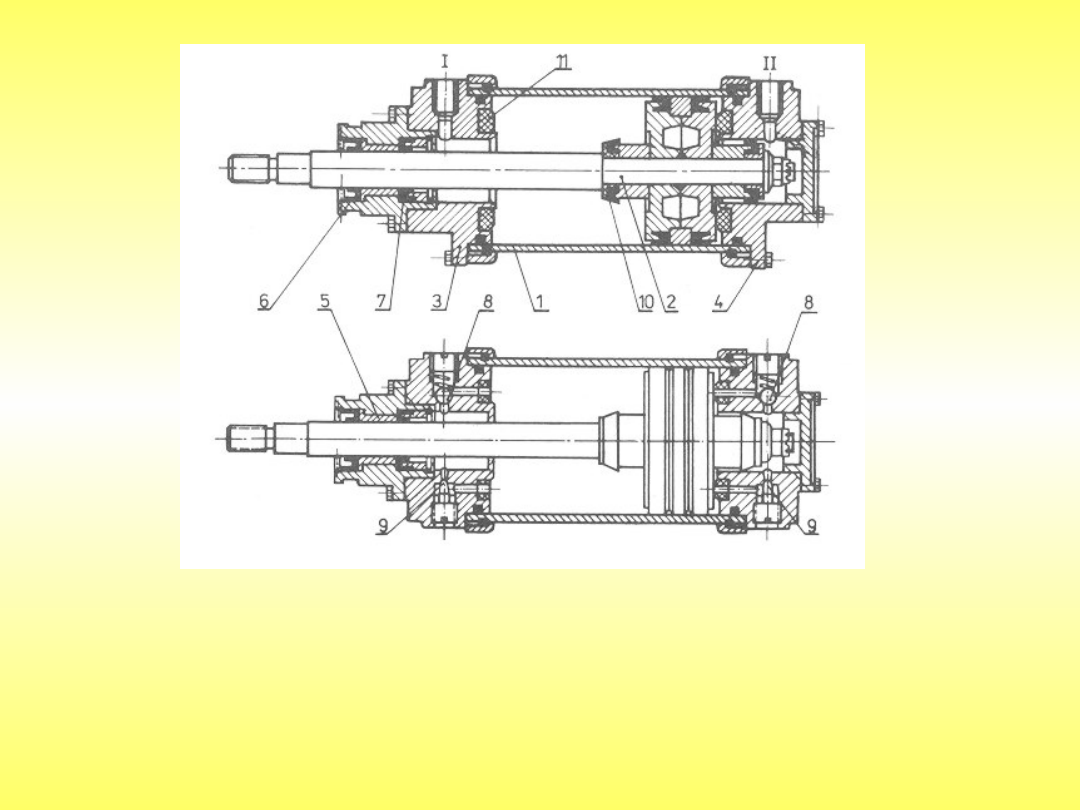
Rys. 6.4. Siłownik pneumatyczny jednotłoczyskowy dwustronnego
działania; 1–tuleja, 2–zespół tłoka z tłoczyskiem, 3, 4–pokrywy, 5–tuleja
prowadząca, 6–pierścień zgarniający, 7–pierścień uszczelniający, 8–
zawory zwrotne, 9–zawory dławiące, 10, 11–amortyzatory
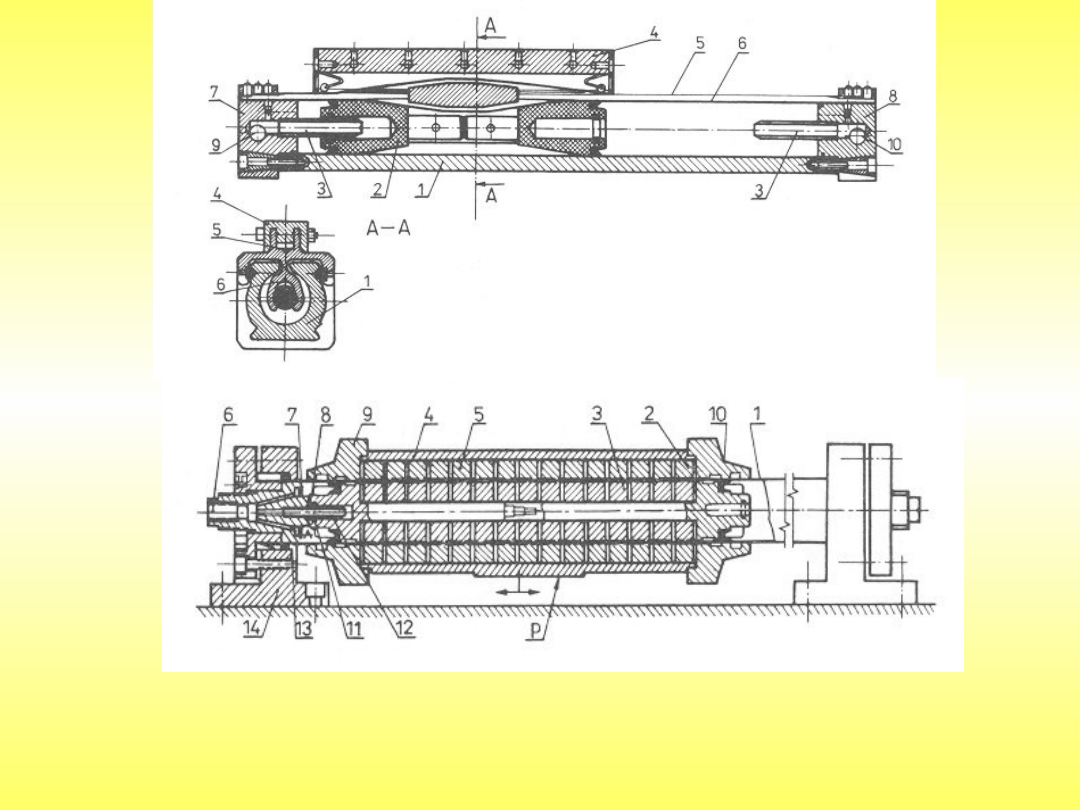
Rys. 6.5. Pneumatyczny siłownik
beztłoczyskowy z przeciętą tuleją
cylindrową; 1–tuleja cylindrowa, 2–tłok,
3–zderzaki, 4–suwak, 5,6–uszczelki,
7,8–pokrywy, 9, 10–otwory
doprowadzające powietrze
Rys. 6.6. Pneumatyczny siłownik beztłoczyskowy ze sprzęgiem
magnetycznym; 1–cienko ścienna tuleja o specjalnych własnościach
magnetycznych, 2–tłok, 3–magnesy trwałe umieszczone w tłoku, 4–suwak,
5–magnesy trwałe umieszczone w suwaku, 6–otwór doprowadzający
powietrze, 7–uszczelka, 8–otwór odpływowy powietrza, 9,10–pokrywy, 11–
uszczelka, 12–rurka, 13–otwory odpływowe, 14–korpus
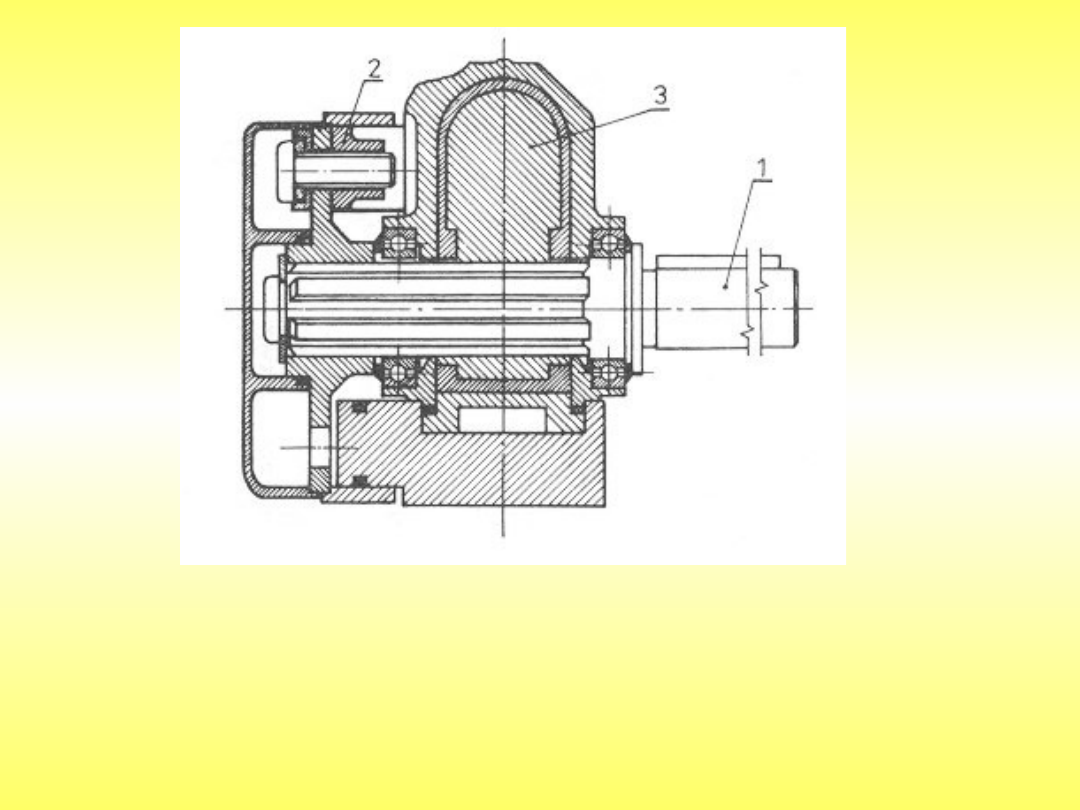
Rys. 6.7. Siłownik pneumatyczny wahadłowy: 1–wał
wyjściowy, 2–zderzaki do nastawiania kąta obrotu,
3–łopatki

Sztuczne mięśnie płynowe wypełniane cieczą – sztuczne mięśnie hydrauliczne HAM
(Hydraulic Artificial Muscle) lub gazem – sztuczne mieśnie pneumatyczne PAM
(Pneumatic Artificial Muscle) wykonuje są z elastycznej przepony w kształcie rurki
(balonu, mieszka lub worka), wykonanej z gumy, lateksu lub silikonu, oplecionej
elastyczną siatką z rozciągliwego i elastycznego włókna silikonowego. Siatka
mocowana na końcach mięśnia tworzy rodzaj sztucznych ścięgien. Właściwości
mięśni płynowych uzasadniają ich porównanie do biologicznych mięśni
szkieletowych. W mięśniach pneumatycznych jako czynnik roboczy wykorzystuje o
własnościach elektroreologicznych i magnetoreologicznych. Skurcz tych mięśni
zależy od ciśnienia płynu sterowanego zaworami
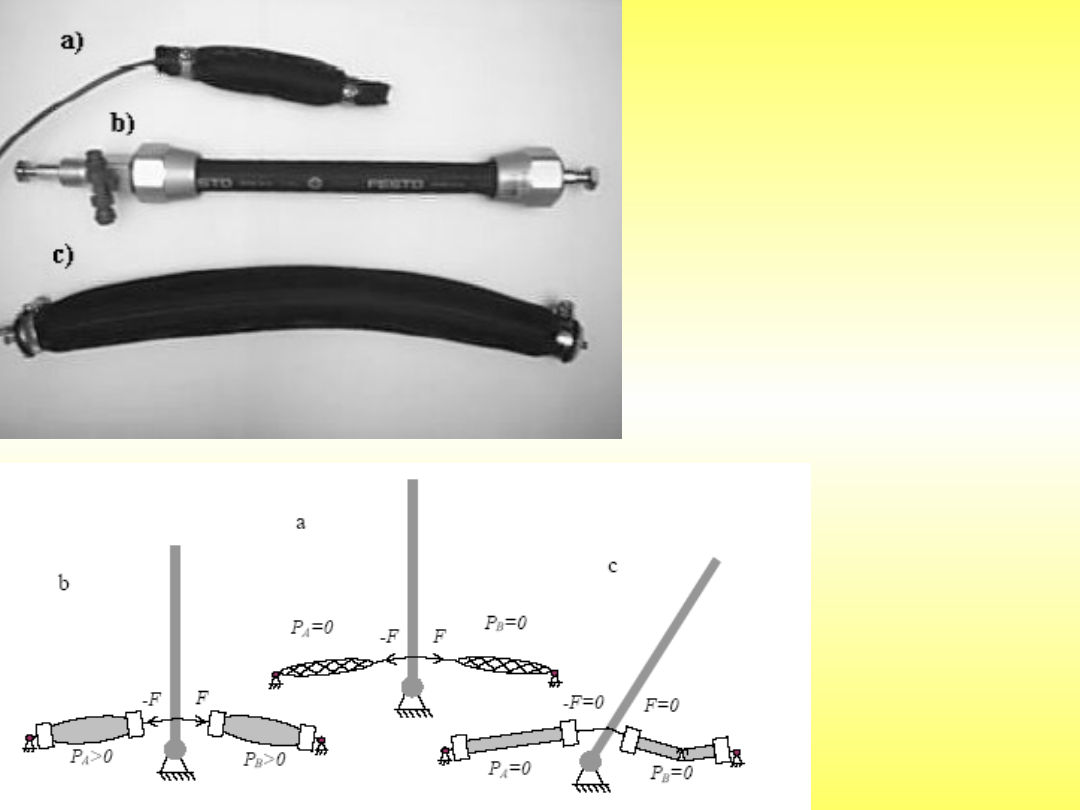
Fot. 1. Sztuczne mięśnie
pneumatyczne: a – Shadow, b –
Festo, c –
wyprodukowany w PŁ
Rys. 2. Przegub napędzany
parą mięśni

Sztuczne mięśnie zbudowane z nanorurek NAM (Nanotube
Artificial Muscle), wynalezione w Instytucie Maxa Plancka
(Stuttgart), produkowane są przez firmę AlliedSignal Inc.
Wzdłuż węglowych nanorurek ułożone są krążki zbudowane
z 14 atomowego węgla. Submikroskopowy węgiel ukształtowany
w postaci nanorurki wypełniony jest elektrolitem. Po
doprowadzeniu prądu sztuczny muskuł NAM kurczy się lub
wydłuża. Z miliona nanorurek buduje się włókna mięśni
o dowolnej długości, które przypominają strukturę mięśnia
naturalnego.
Sztuczne biomięśnie (BioArificial Muscle) zbudowane są
z kurczliwego polimeru wykonanego z włókna poliakrylonitrylu
(PAN), poliakrylonitrylu – polipyrolu (PAN-PPY) oraz polialkoholu
winylowego lub polikwasu akrylowego (PVA-PAA)
o średnicy 2,5 μm. Charakterystyka mięśnia siła-wydłużenie
jest liniowa, w ciągu 20 ms mięśnie polimerowe kurczą się
o 20%. Sztuczne mięśnie polimerowe w szybkości działania
są najbardziej podobne do działania ludzkich mięśni, ale ich
siła jednostkowa (na 1cm2) jest dwa razy większa od siły
mięśnia naturalnego.

Sztuczne biomięśnie zbudowane z kompozytów polimerowych
IPMC (Ionic Polymer-Metal Composite) i IPCC (Ionic
Polymer Conductor Composites) wykazują zdolność odkształcenia
pod wpływem prądu o małym napięciu, są lekkie, łatwo
sterowalne, mają naturalne właściwości tłumienia drgań oraz
są bardzo elastyczne.
Sztuczne biomięśnie polimerowe żelowe wypełnione są
płynem żelowym wrażliwym na zmianę liczby pH – IPG (Ionic
Polymeric Gels) lub na zmianę prąd elektrycznego – EAPG
(Electro-Active Polymer Gel) i CPG (Contractile Polymer Gel)
Sztuczne mięśnie zbudowane z polimerów elektroaktywnych
EAPAM (Electroactive Polimers Artificial Muscles), elektrostrykcyjnych
EPAM (Electrostrictive Polymer Artificial Muscles)
i dielektrycznych DEAMA (Dielectric Elastomer Artificial
Muscle Actuators). Działanie tych mięśni polega na pobudzeniu
prądowym dwóch elektrod, w wyniku tego powstaje
różnica potencjałów elektrycznych wywołująca pole magnetyczne,
które wpływa na zmianę wymiarów geometrycznych –
zmniejszenie grubości i wydłużenie – filmu polimerowego lub
elastomerowego. W filmie polimerowym i elastomerowym
powstaje efekt ciśnieniowy Maxwella, zależny od podatności
materiału.
Sztuczne mięśnie wykorzystujące efekt piezoelektryczny
stosowane są w mikrosystemach elektromechanicznych
MEMS (Micro Eletro Mechnical System). Energia dostarczana
do elementu piezoelektrycznego powoduje jego odkształcenie,
wówczas piezoelement połączony z ruchomym elementem
tworzy mikroukład mięśniowy.
– Sztuczne mięśnie w kształcie sprężyny lub spirali z drutu
wykonanego z materiałów o właściwościach z tzw. „pamięcią
kształtu”. W materiałach z „pamięcią kształtu” wykorzystuje się
stopy Ti-Ni (SMA – Shape Memory Alloy) oraz stopy Ti-Ni
i silikonu (SMAS – Shape Memory Alloy–Silicone).
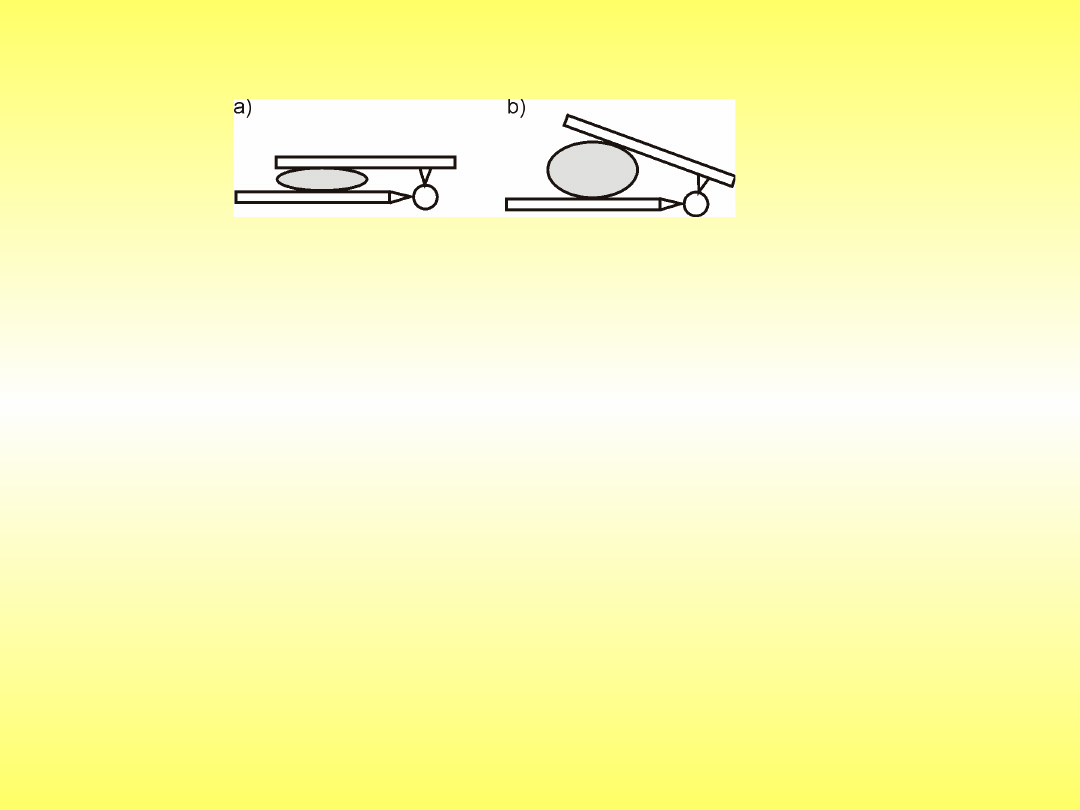
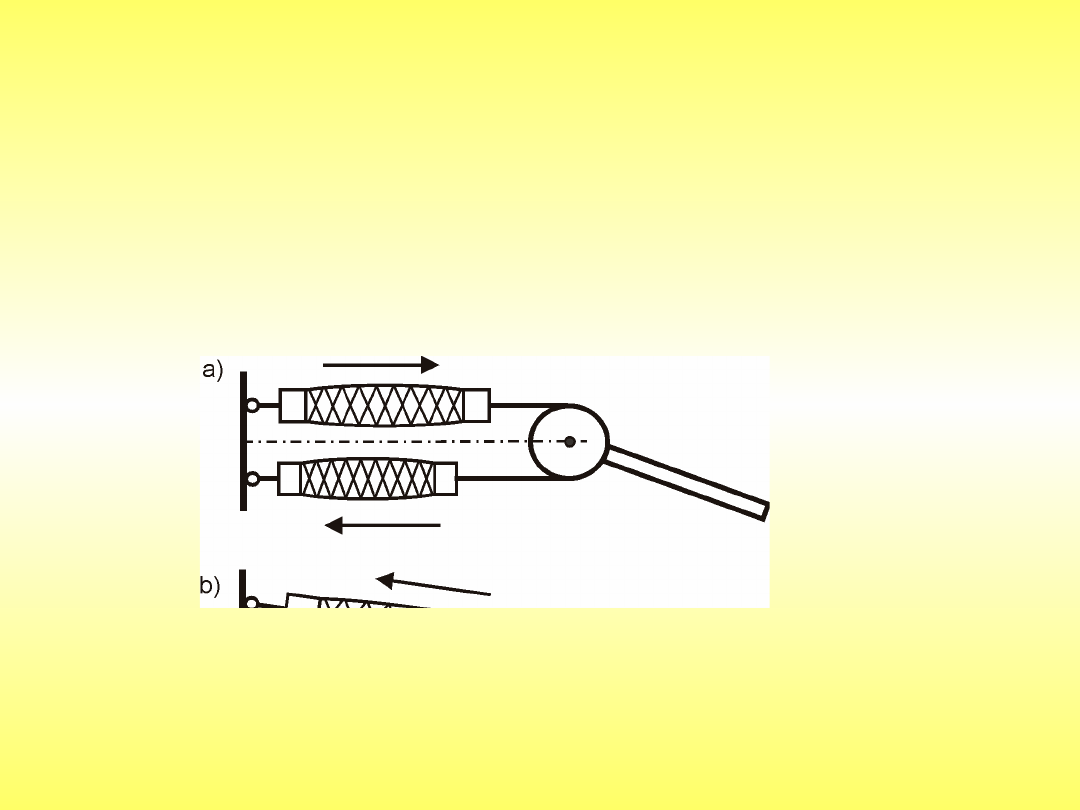
Rys. 4. Schemat kinematyczny dźwigni rozpieranej mięśniem
pneumatycznym:
a) w stanie początkowym, b) w stanie napełnienia
6.3. Napędy elektrohydrauliczne
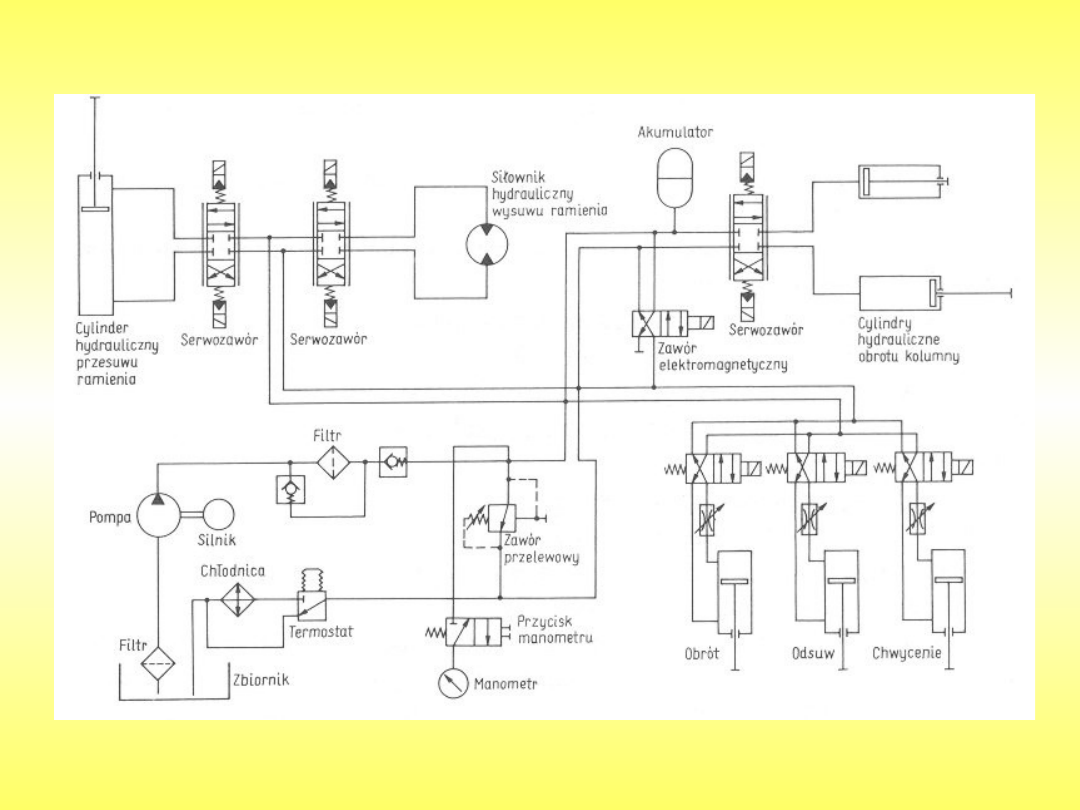
Rys. 6.8. Schemat hydraulicznego napędu robota
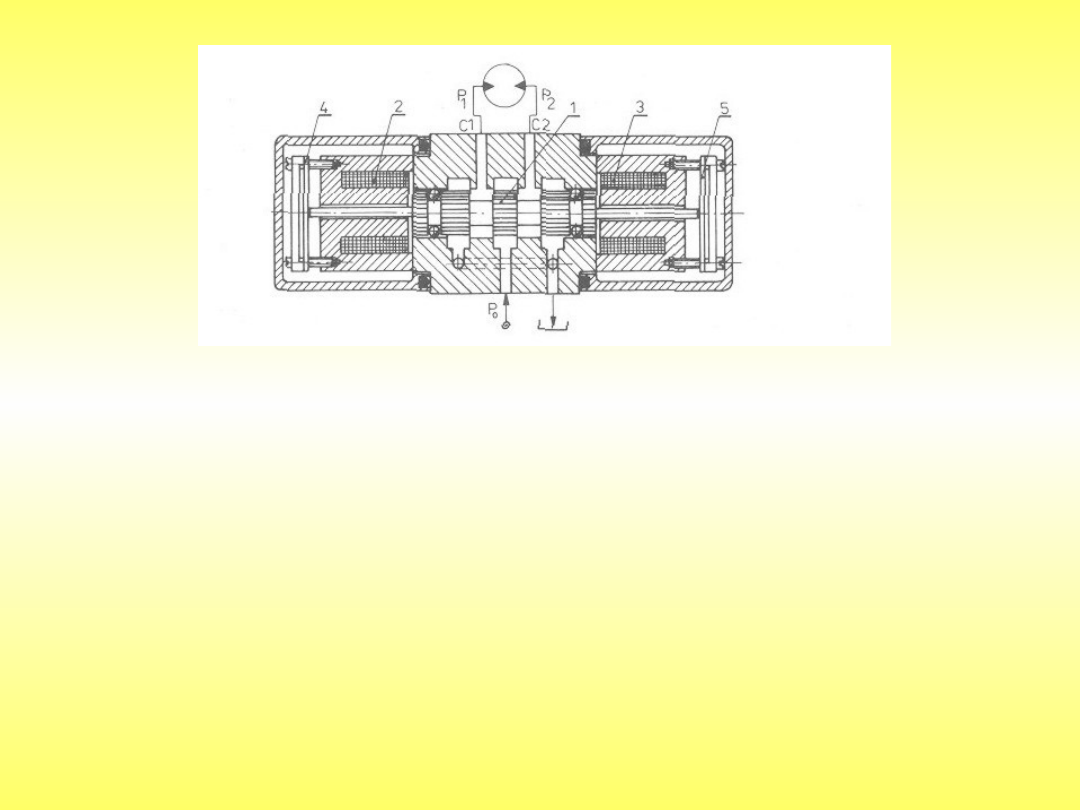
Rys. 6.9. Wzmacniacz elektrohydrauliczny suwakowy
jednostopniowy; 1–suwak czterokrawędziowy, 2,3–
elektromagnesy, 4,5–płaskie sprężyny
p
1
= p
2
= 0,5p
0
6.4.5. Napędy z silnikami skokowymi
V I I
3
2
V I
2
2
V
1
2
V I I I
I
4
2
1
1
1
3
I I I
1
4
I V
2
1
I I
3
4
30
360
m
Z
360
R
r
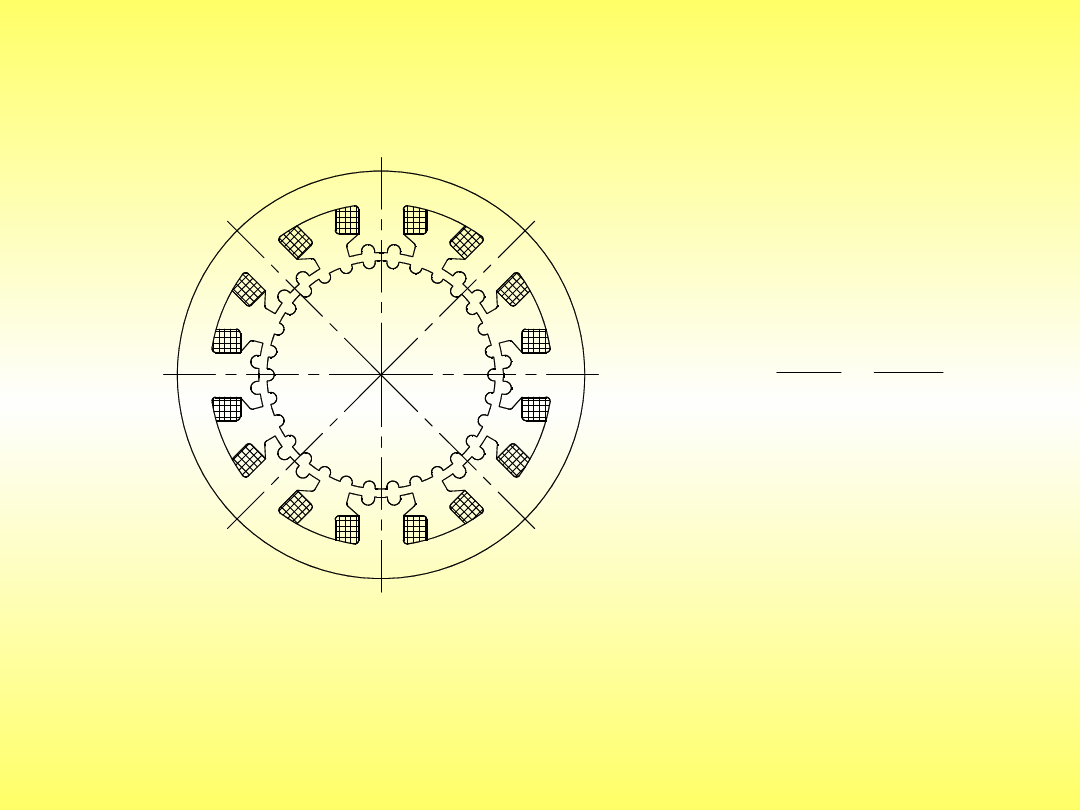
Rys. 6.26. Struktura czterofazowego silnika skokowego
reluktancyjnego
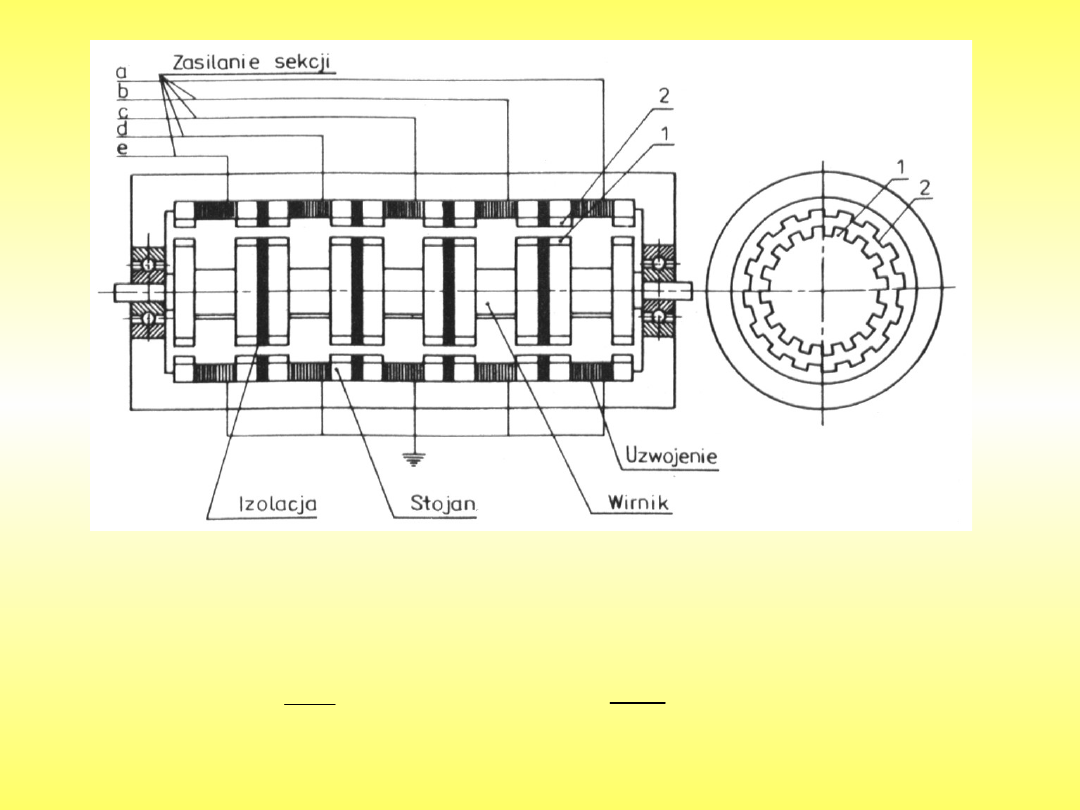
Rys. 6.27. Silnik skokowy pięciosekcyjny: 1 - wirnik, 2 - stojan
0
3
5
z
360
=
0
5
,
1
10
z
360
=
6.5. Przekładnie mechaniczne
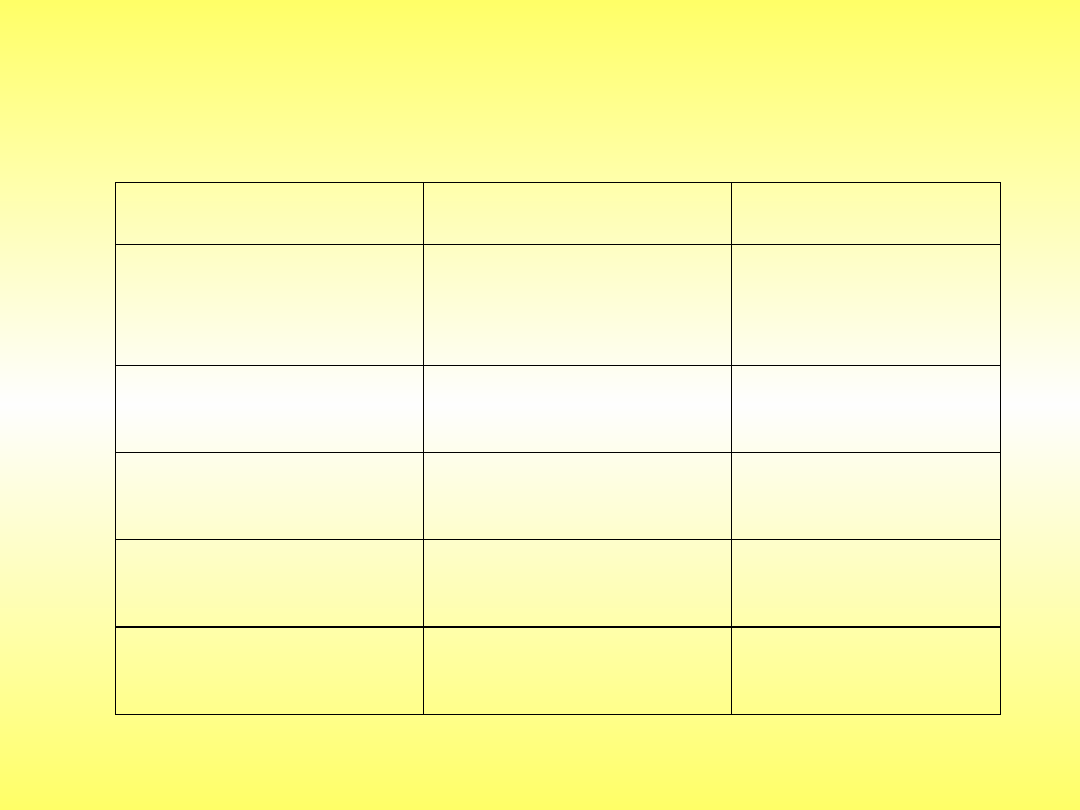
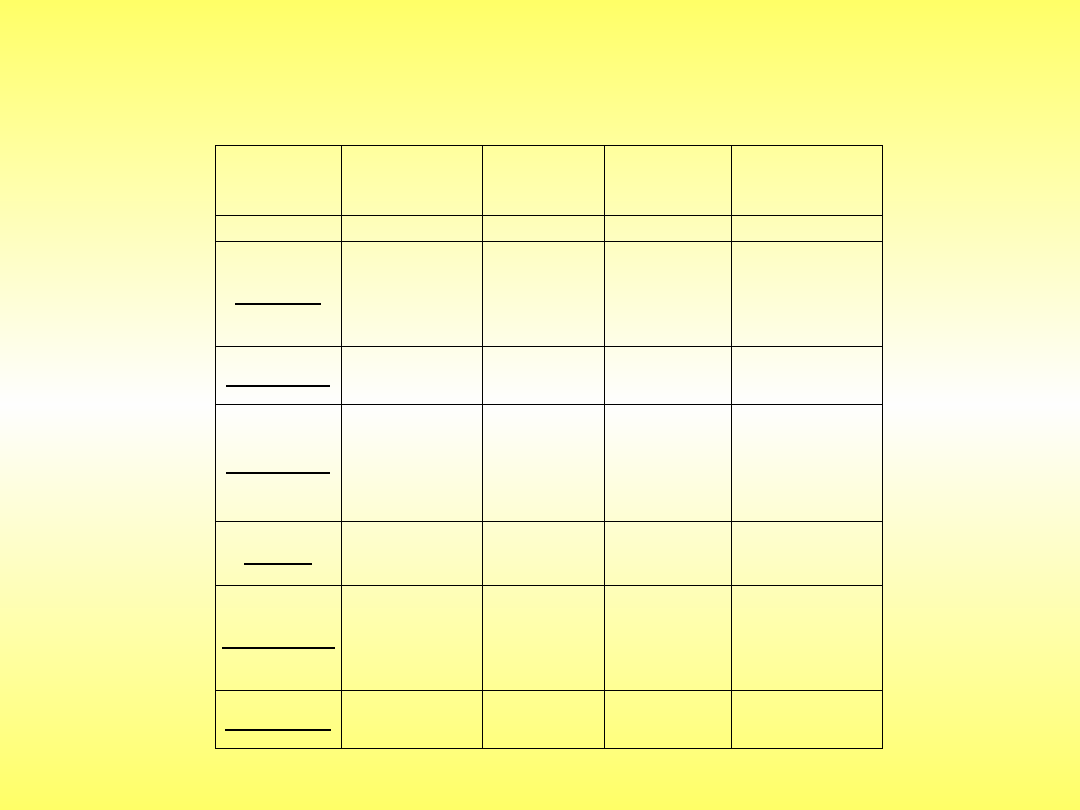
Tabela 6.1. Kryteria dla przekładni mechanicznych w napędach robotów
KRYTERIUM
WŁAŚCIWOŚCI
WARTOŚĆ
Dokładność pozycjonowania luz kątowy
sztywność
równomierność biegu
< 3`
> 10
5
N - m/rad
3` /obr
Prędkość
sprawność
moment bezwładności
> 70 %
< 6-10
4
kg -m
2
Stabilność
odporność na przeciążenia
żywotność
> 50 %
> 5000 godzin
Wytrzymałość
eksploatacyjna
koszt utrzymania
zwartość budowy
niski
duża
Możliwości integracyjne
dowolność położenia
odwrotność kinematyki
tak
tak
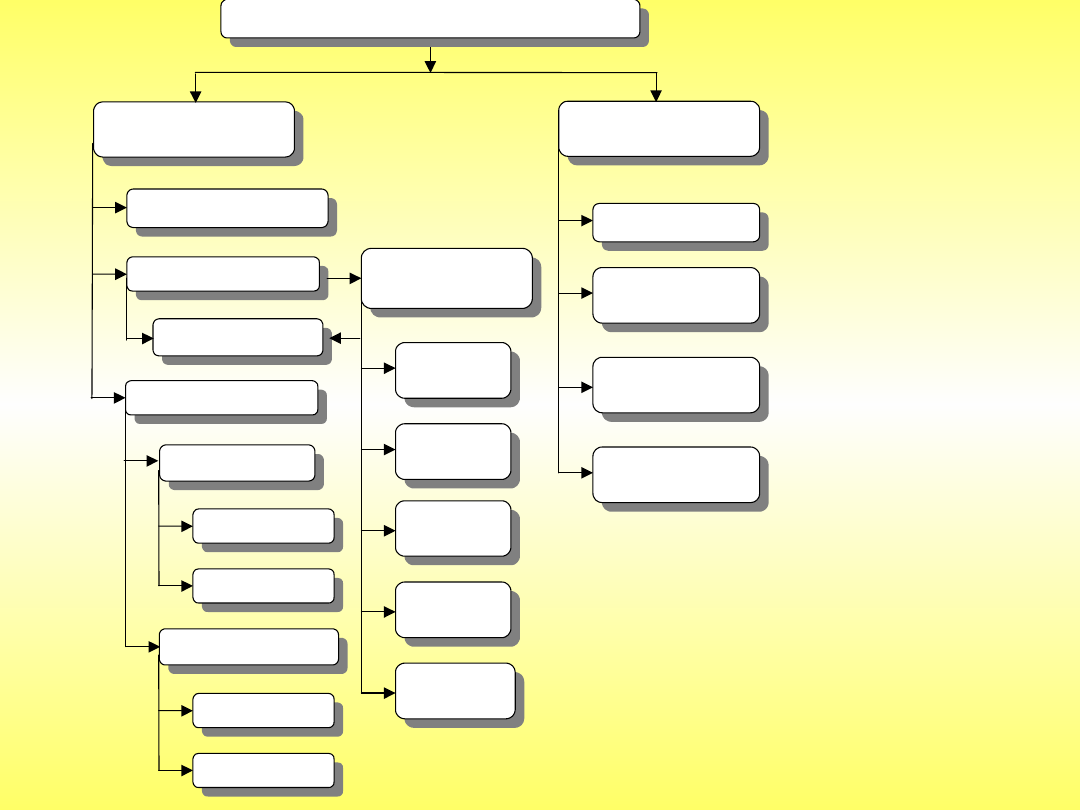
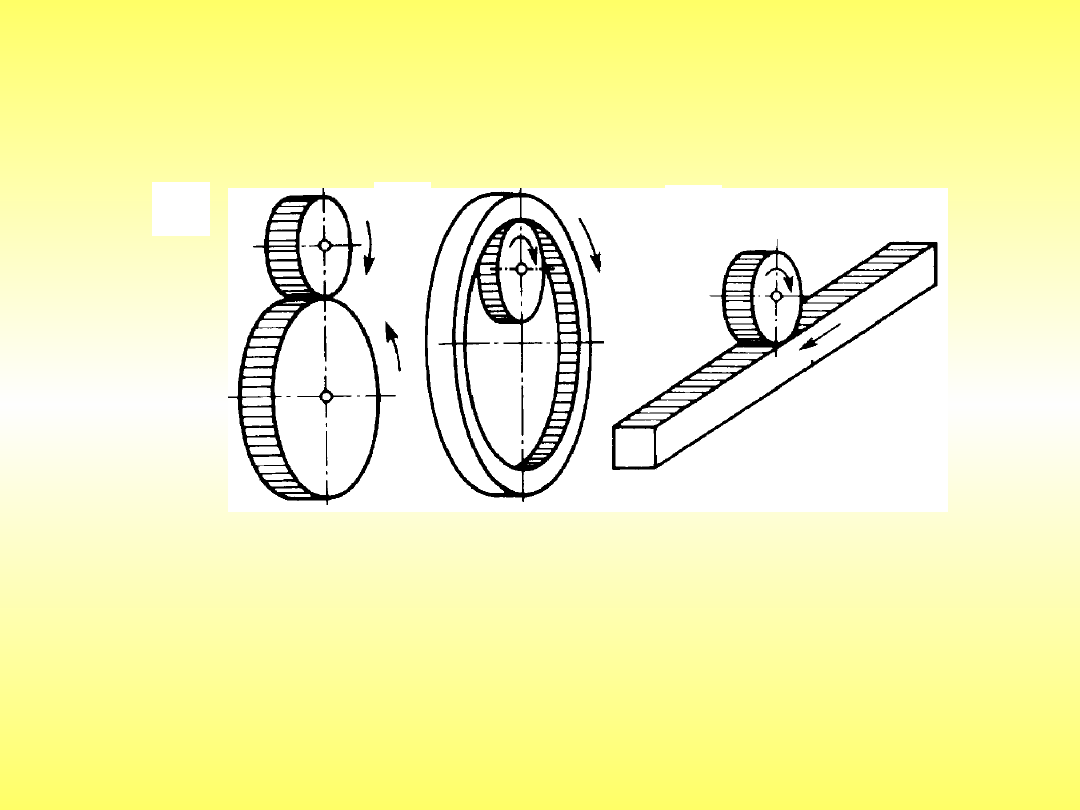
Przekazujące ruch
obrotowy
Zamieniające ruch
obrotowy na postępowy
Przekładnia walcowa
Przekładnia śrubowa
Przekładnie zębate
Przekładnia
zębatkowa
Mechanizmy dźwigniowe
Przekładnia pasowa
zębata
Przekładnia
łańcuchowa
Przekładnie
redukujące
Przekładnia
planetarna
Przekładnia
falowa
Przekładnia
cykloidalna
Przekładnia
precesyjna
Przekładnia
ślimakowa
Przekładnie cięgnowe
Sprzężenie cierne
Łańcuchowa
Pasowa zębata
Sprzężenie kształtowe
Linowa
Pasowa klinowa
Przekładnie mechaniczne w robotach przemysłowych
Rys. 6.28. Podział przekładni
mechanicznych w robotach
przemysłowych
6.5.1. Przekładnie mechaniczne przekazujące ruch
obrotowy
6.5.1.1. Mechanizmy dźwigniowe
1
4
2
3
R
1
12
5
11
13
15
16
7
8
14
6
10
9
R
2
S1
S2
6.5.1.2. Przekładnie zębate
a)
b)
c)
Rys. 6.31. Rodzaje przekładni zębatych: a) walcowa zewnętrzna, b)
walcowa wewnętrzna, c) zębatkowa (koło zębate+ listwa zębata)
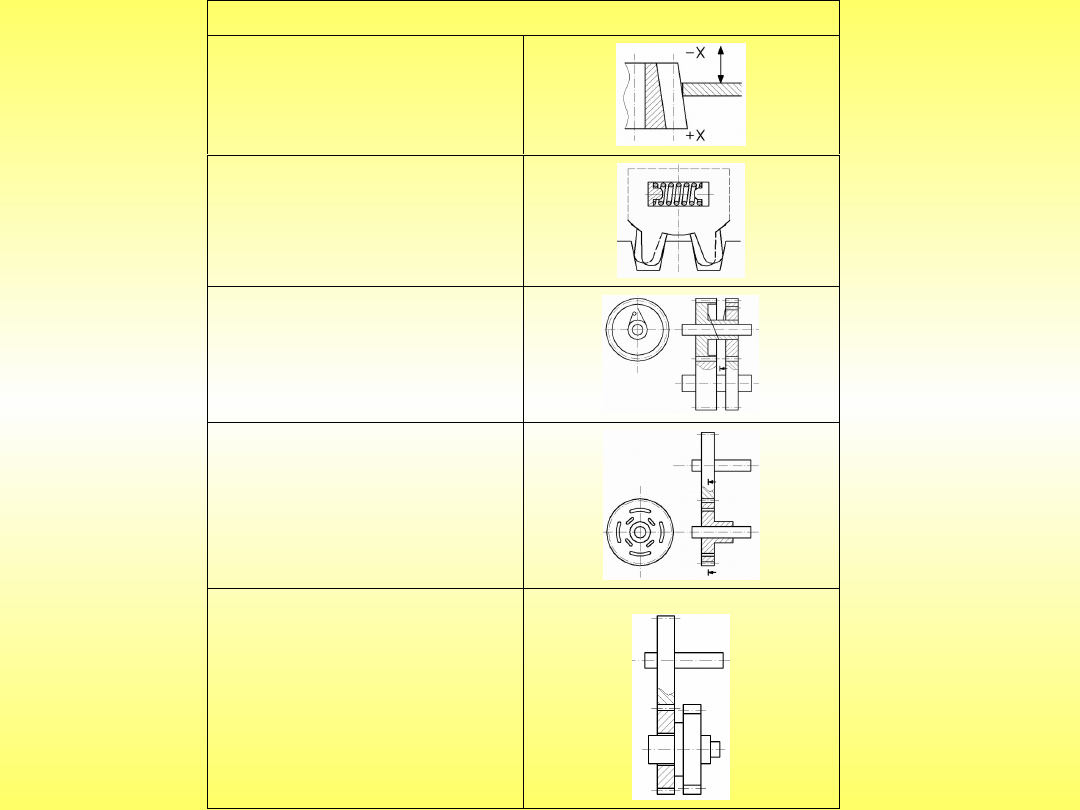
Sposoby kasowania luzu międzyzębnego
Przekładnia o zmiennej korekcji uzębienia w
jednego kole. Kasowanie luzu obwodowego
odbywa się prze osiowe przesuwanie koła
współpracującego.
Przekładnia z kołem nożycowym. Kasowanie luzu
obwodowego dzięki wytworzeniu napięcia
wstępnego między dwoma połówkami koła
nożycowego.
Przekładnia z dwoma parami kół pomiędzy
którymi wytworzone jest napięcie wstępne.
Przekładnia z jednym kołem podatnym
sprężyście. Kasowanie luzu obwodowego dzięki
eliminacji luzu wierzchołkowego.
Przekładnia z jednym kołem zamocowanym do
podatnej sprężyście piasty. Kasowanie luzu
obwodowego dzięki eliminacji luzu
wierzchołkowego
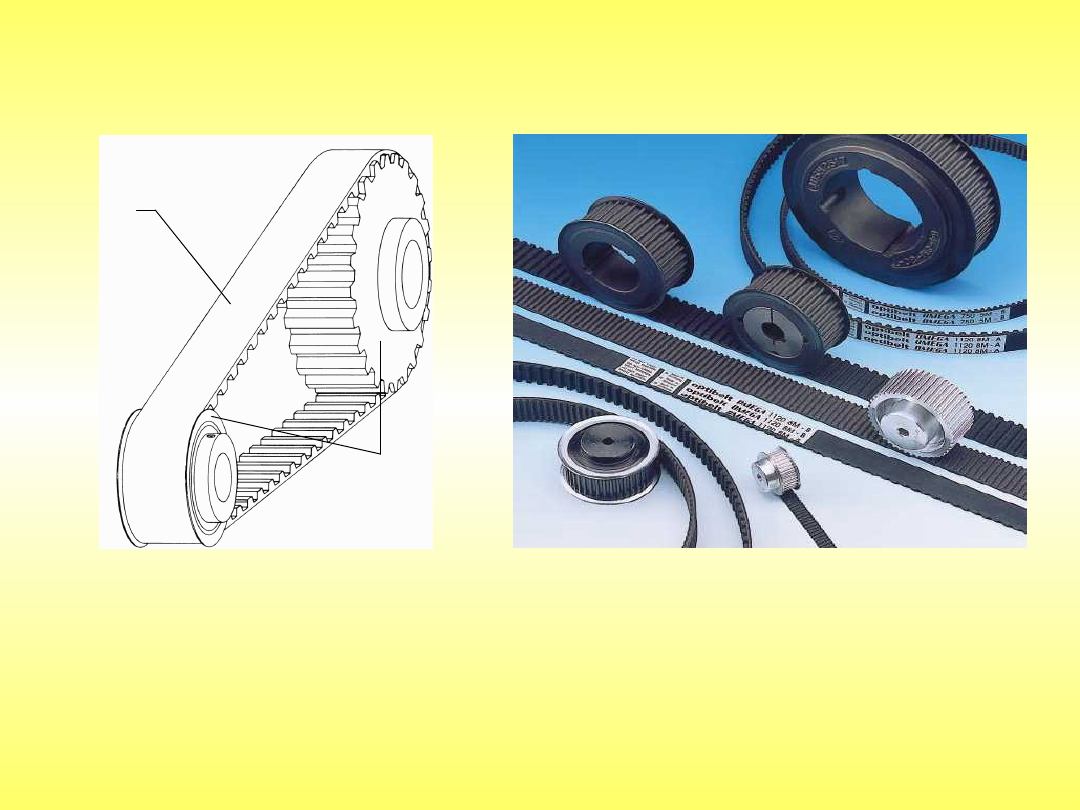
6.5.1.3. Przekładnie cięgnowe
1
2
Rys. 6.32. Budowa przekładni pasowej z pasem
zębatym: 1-pas zębaty, 2-koła zębate
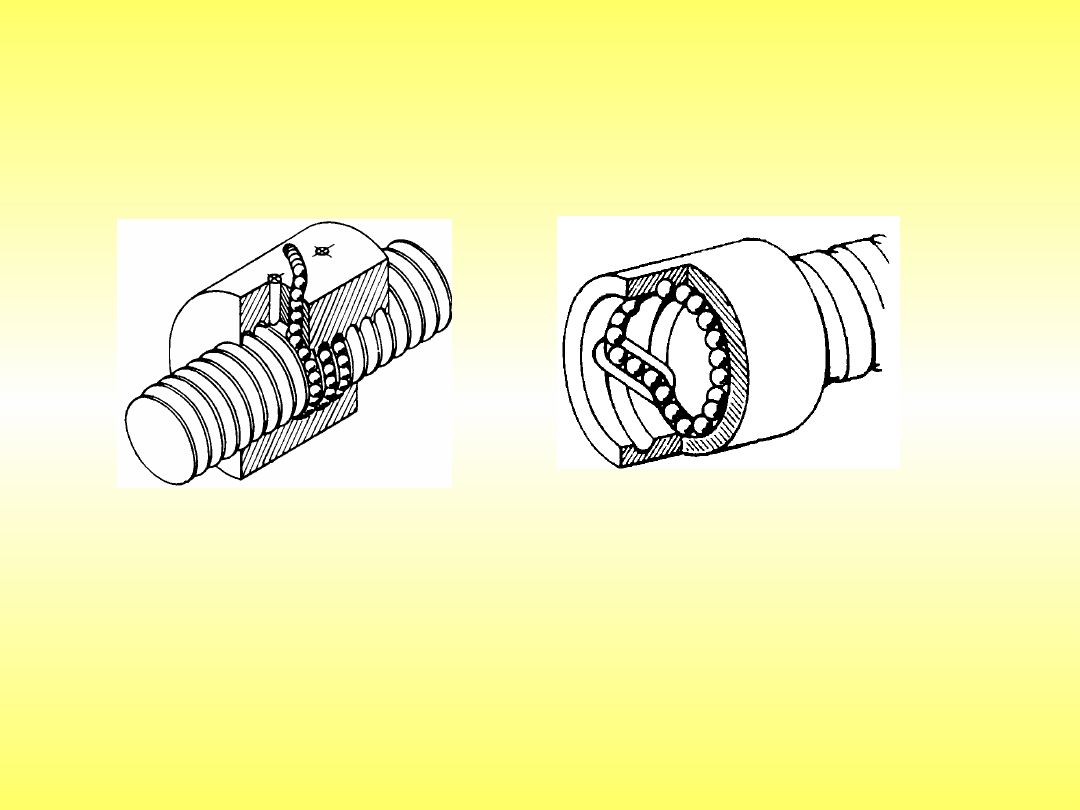
6.5.2. Przekładnie mechaniczne do zmiany ruchu
obrotowego na postępowy
Rys. 6.33. Przykładowe rozwiązania przekładni śrubowej tocznej: a) z
zewnętrznym obiegiem elementów tocznych, b) z wewnętrznym
obiegiem elementów tocznych
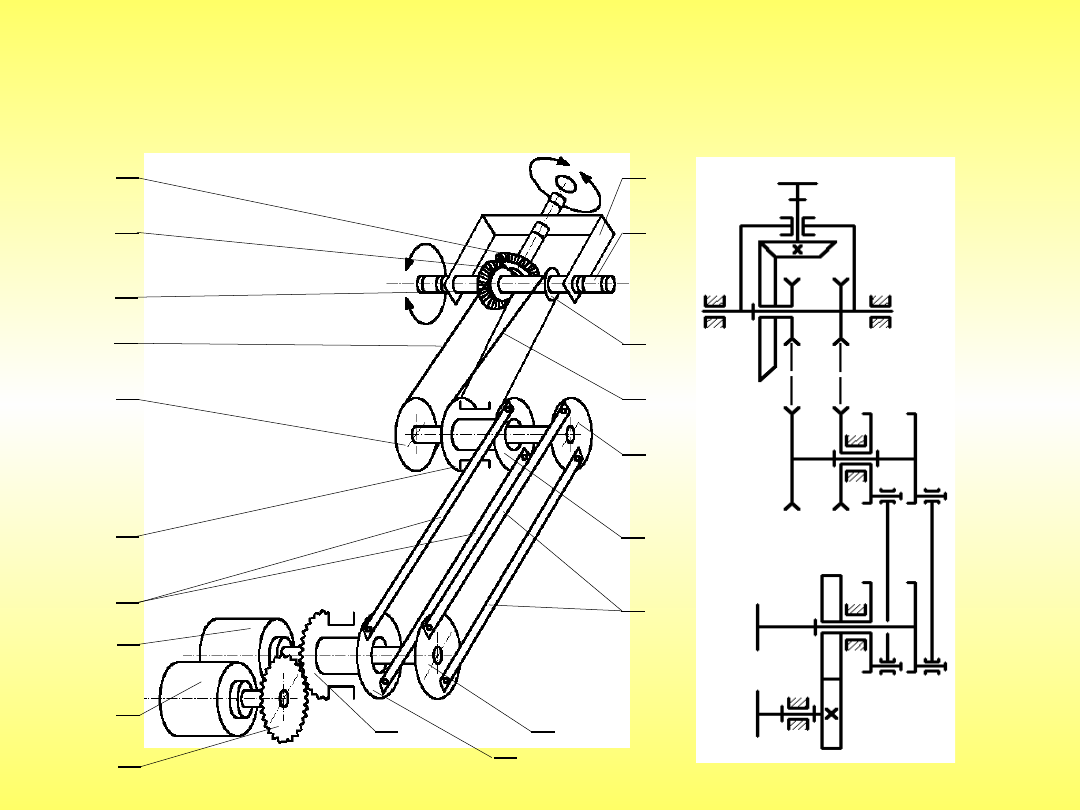
1
2
4
5
3
6
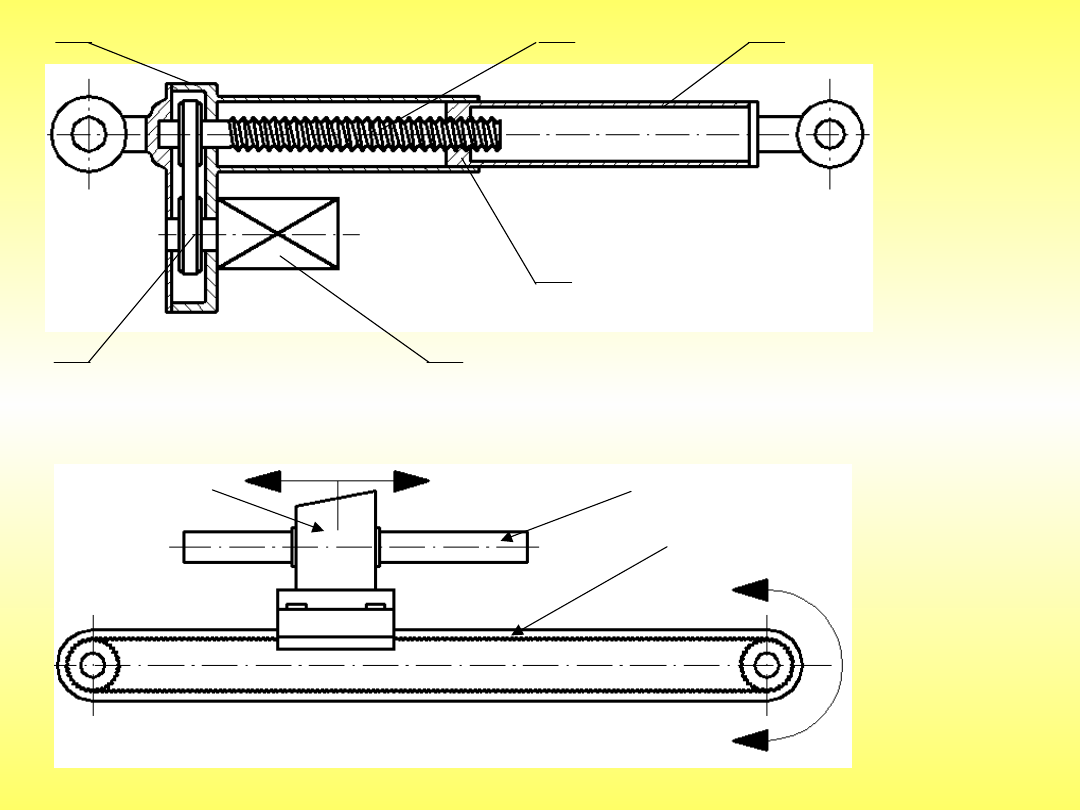
Rys. 6.34. Konstrukcja wysuwnego
ramienia robota o kinematyce
równoległej
3
2
1
Rys. 6.35. Przekładnia
zębatkowa jako mechanizmu
zamiany ruchu obrotowego
na postępowy: 1–
przekładnia pasowa, 2–
prowadnica, 3–prowadnik
6.5.3. Redukujące przekładnie mechaniczne
Tabela 6.4. Zestawienie parametrów przekładni silnie redukujących [7]
Typ
przekładni
Minimalne
przełożenie Sprawność
Max.
prędkość
obrotowa
Luz kątowy
i
n [obr/min]
Walcowa
1st. 1:10
2st. 1:30
3st. 1:125
4st. 1:625
0,98-0,99
50 000
1st < 3’
(napięcie
wstępne)
Ślimakowa
1st. 1:75
2st. 1:250
0,85-0,96
3000
<3’
Planetarna
1st. 1:87
0,94-0,97
3000
<0,1’
(napięcie
wstępne)
<1’
<3’
Falowa
1:320
0,80-0,90
3000
<6’
<3’
Cykloidalna
1st. 1:87
2st. 1:6000
3st.
1:100000
0,80-0,90
3000
<6’
<3’
Precesyjna
1st. 1:120
2st. 1:4000
0,60-0,70
2000
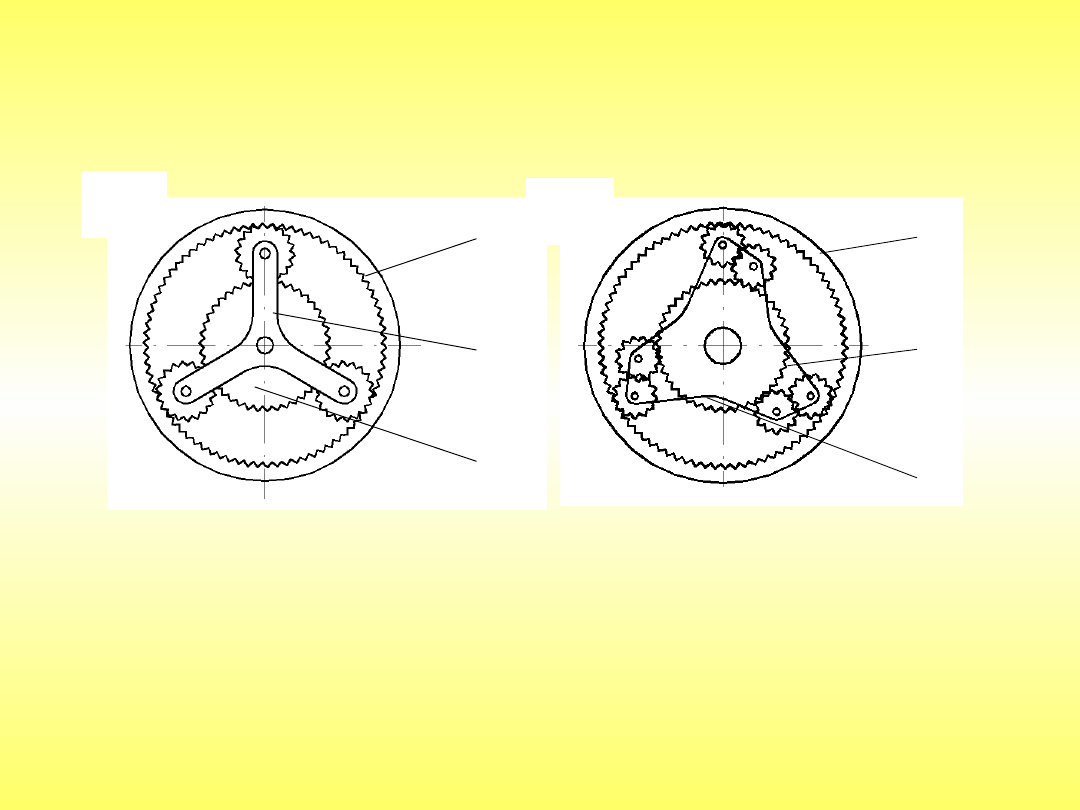
6.5.3.1. Przekładnie planetarne
1
3
2
1
3
2
a
b
Rys. 6.36. Schemat i budowa przekładni planetarnych o tej samej
wartości bezwzględnej przełożenia, lecz o przeciwnych znakach: a)
przekładnia z jednym kołem obiegowym (i<0), b) przekładnia z dwoma
kołami obiegowymi (i>0), 1-koło zewnętrzne, 2-koło wewnętrzne, 3-
jarzmo z satelitami
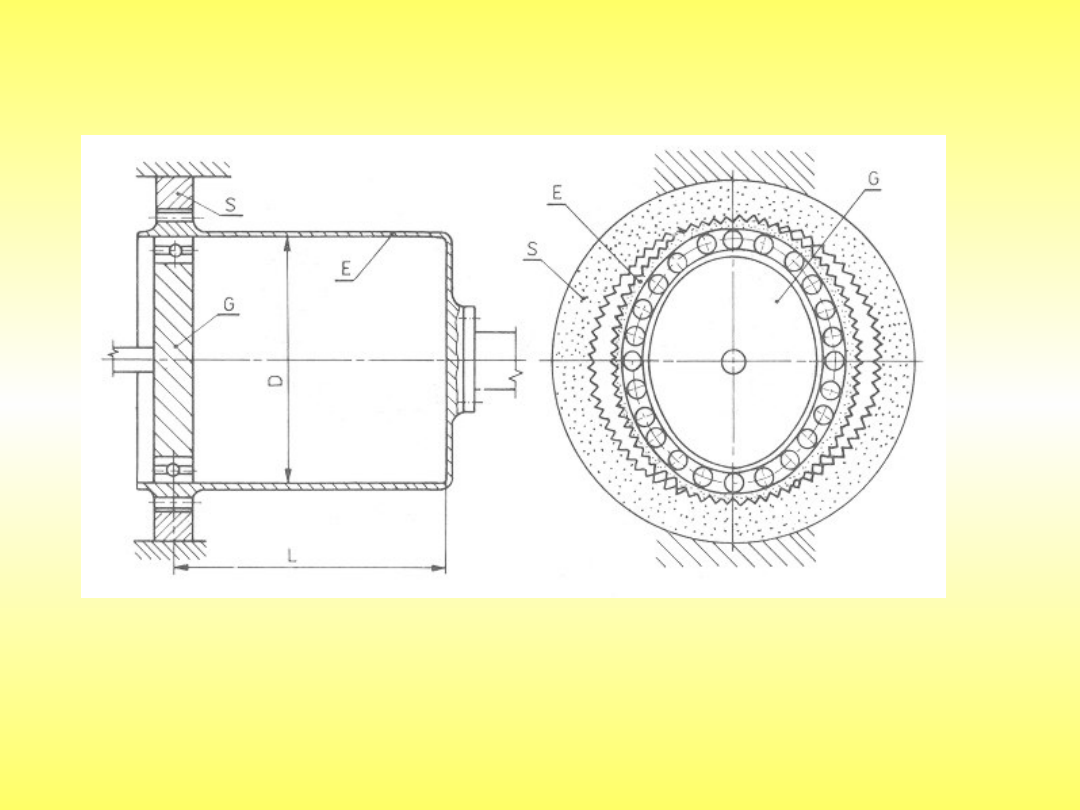
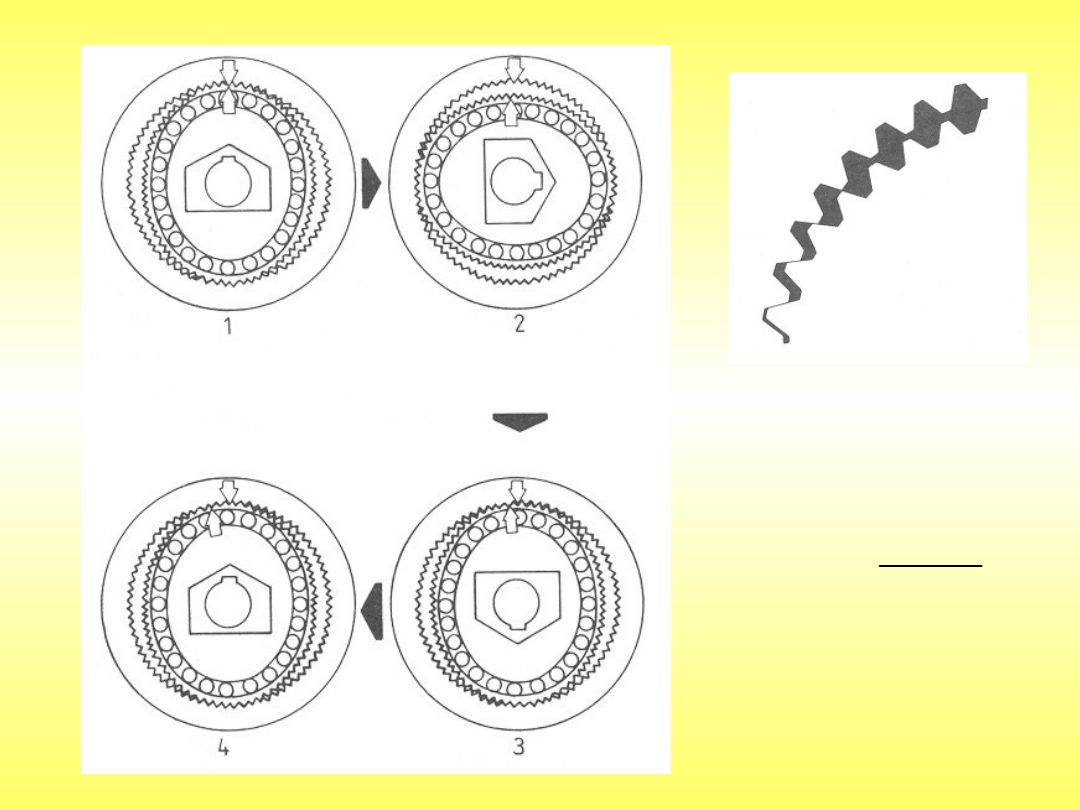
6.5.3.2. Przekładnie falowe
Rys. 6.37. Schemat przekładni falowej: G-generator, E-
elastyczne koło zębate, S-sztywne koło zębate o uzębieniu
wewnętrznym
E
E
S
nom
z
z
z
i
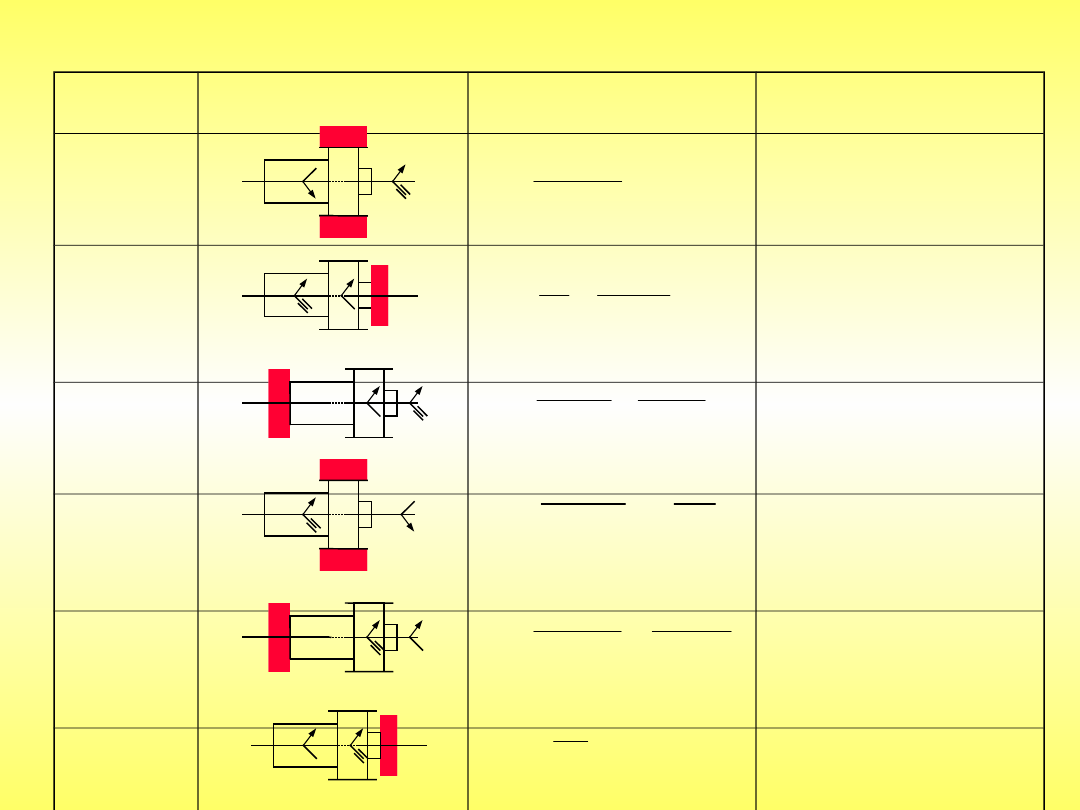
Przypade
k
Schemat
Przełożenie
Uwagi
1
Unieruchomione koło
S. Napędzany
generator G. Odbiór
napędu na kole E
1
Unieruchomiony
generator G.
Napędzane koło E.
Odbiór napędu na
kole S
1
Unieruchomione koło
E. Napędzany
generator G. Odbiór
napędu na kole S
2
Unieruchomione koło
S. Napędzane koło E.
Odbiór napędu z
generatora
2
Unieruchomione koło
E. Napędzane koło S.
Odbiór napędu z
generatora
2
Unieruchomiony
generator.
Napędzane koło S.
Odbiór napędu z koła
E.
Tabela 6.5. Zależności kinematyczne przekładni falowych
S
G
E
S
G
E
S
G
E
S
G
E
S
G
E
S
G
E
nom
E
S
E
i
z
z
z
i
1
i
1
z
z
i
nom
E
S
1
i
1
z
z
z
i
nom
E
E
S
nom
S
E
E
i
1
z
z
z
i
nom
nom
E
S
S
i
1
i
z
z
z
i
nom
E
S
i
1
z
z
i
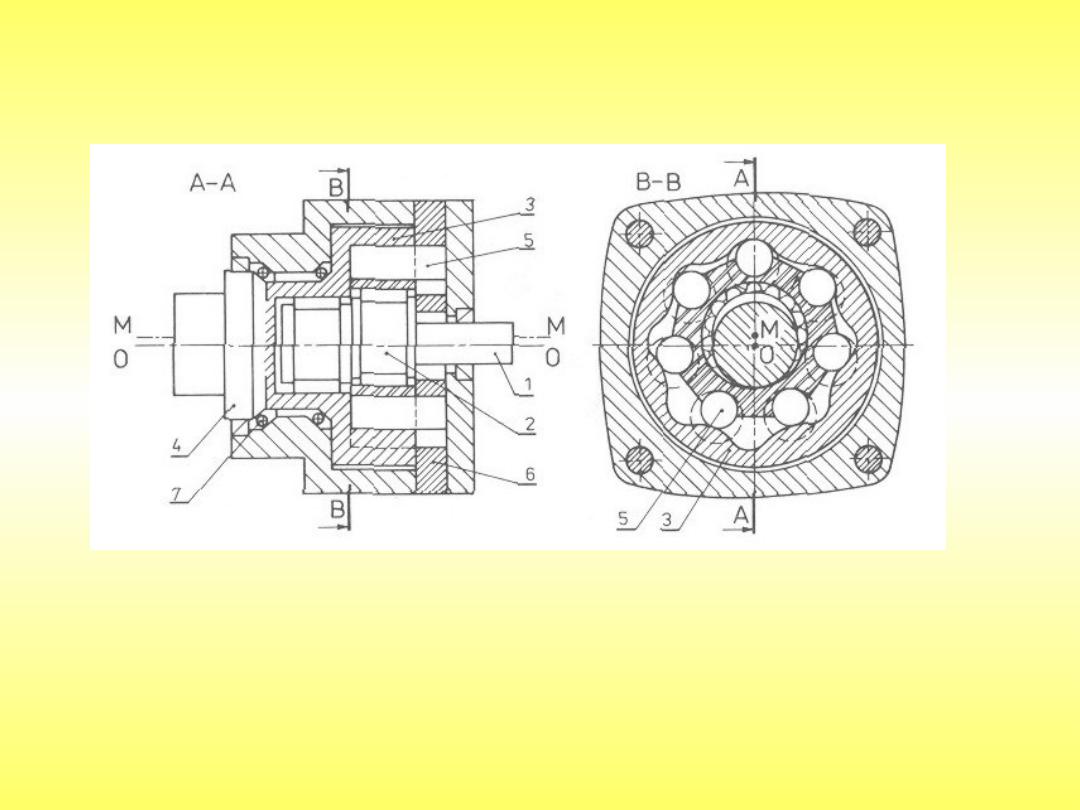
6.5.3.3. Przekładnie cykloidalne
Rys. 6.40. Przekładnia trochoidalna: 1-wał wejściowy (wysokoobrotowy), 2-
mimośród na wale 1, 3-koło centralne z zębami wewnętrznymi,
trochoidalnymi, 4-wał wyjściowy (zdawczy), 5-sworznie koła palcowego, 6-płyta z
otworami na sworznie 5, 7-łożyska koła centralnego 3
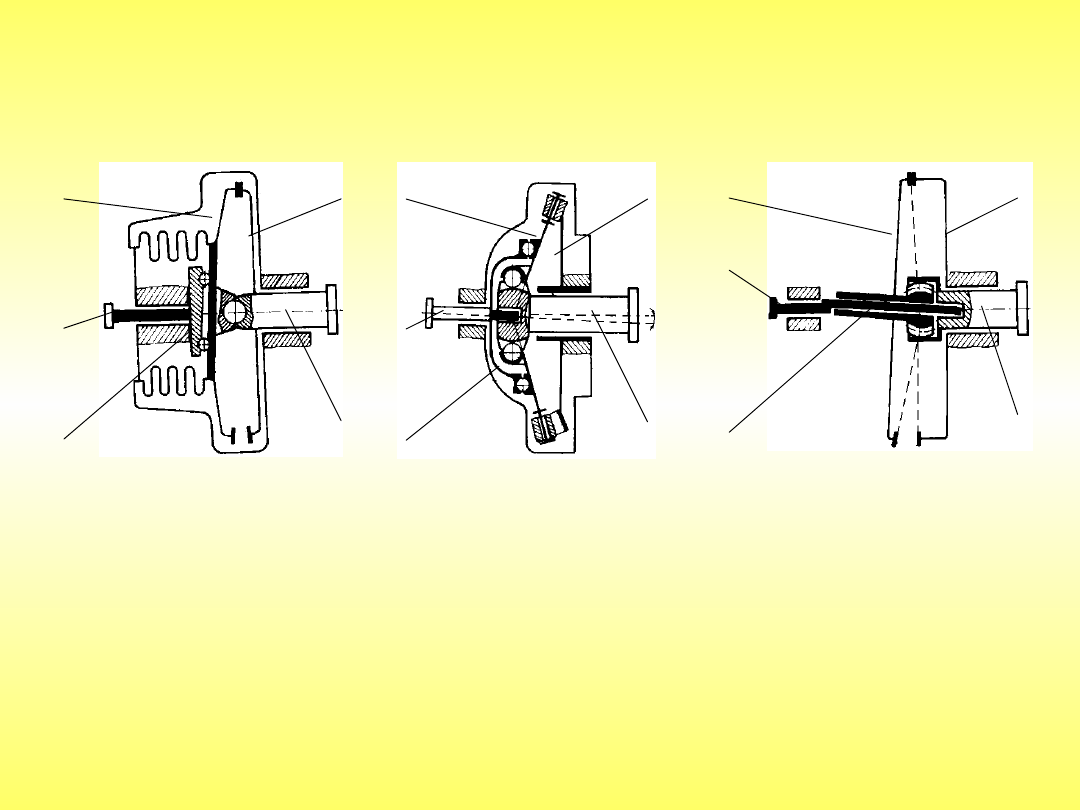
6.3.3.4. Przekładnie precesyjne
2
5
3
4
1
2
5
3
4
1
θ
2
5
3
4
1
Rys.6.41. Różne typy przekładni precesyjnych: a) z satelitą połączoną z
obudową za pomocą mieszka, b) z kołem stożkowym z rolkami, c) o
prostoliniowo- łukowym zazębieniu ; 1- satelita, 2- koło centralne, 3- wał
wyjściowy, 4- jarzmo, 5- wał wejściowy
a)
b)
c)
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
Wyszukiwarka
Podobne podstrony:
Programowanie robotów przemysłowych FANUC
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
(URZYDZENIA CHWYTAJYCE ROBOTÓW PRZEMYSLOWYCH)
9 Efektory robotów przemysłowych
Napędy Robotów Pytania na KOLosa I
Napędy robotów mechanizmy przekazywania ruchu stosowane w robotach
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
Analiza budowy i działania robotów przemysłowych na przykładzie robota PRO 30 ( Politechnika Krakows
90 313901 kontroler robotow przemyslowych
Charakterystyki robotów przemysłowych i ich badanie
(STEROWANIE ROBOTÓW PRZEMYSLOWYCH)
10 Wprowadzenie do programowania robotów przemysłowych
Budowa robotów przemysłowych
Programowanie robotów przemysłowych FANUC
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
więcej podobnych podstron