STEROWANIE ROBOTÓW
PRZEMYSŁOWYCH
5.1. Zadania układów sterowania
1.
Reagowanie na działalno
ść
operatora
2.
Sterowanie w osiach dyskretnych
3.
Sterowanie w osiach pozycjonowanych płynnie
4.
Sterowanie wej
ść
i wyj
ść
technologicznych
5.
Ustalanie kolejno
ś
ci dalszego działania
Metody programowania robotów przemysłowych
Off-line
(poza stanowiskiem pracy robota)
Programowanie za pomocą tekstowych
języków programowania
Programowanie
ciągłe
Programowanie
dyskretne
Programowanie
przez nauczanie
Programowanie
ręczne
On-line
(na stanowisku pracy robota)
Rys. 5.1. Klasyfikacja metod programowania robotów przemysłowych
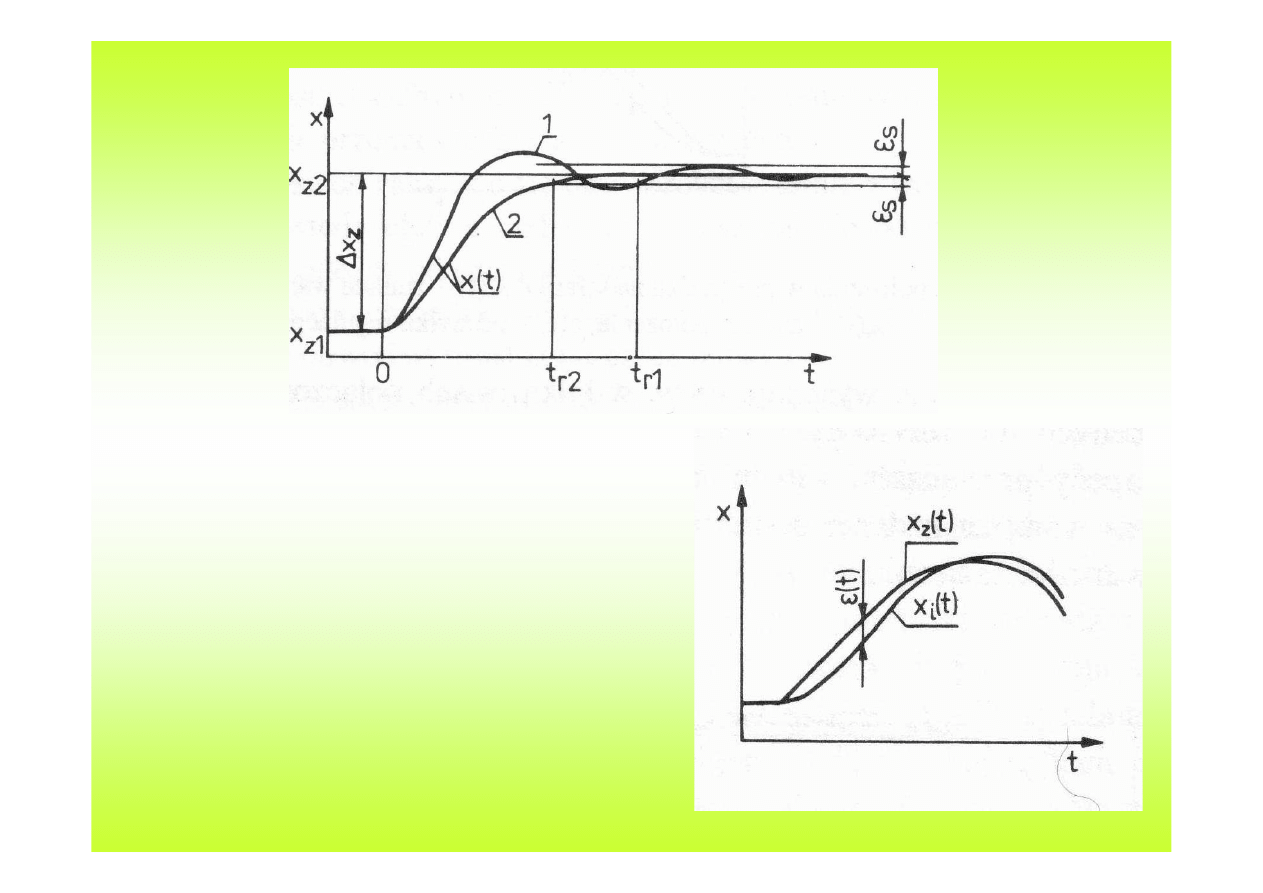
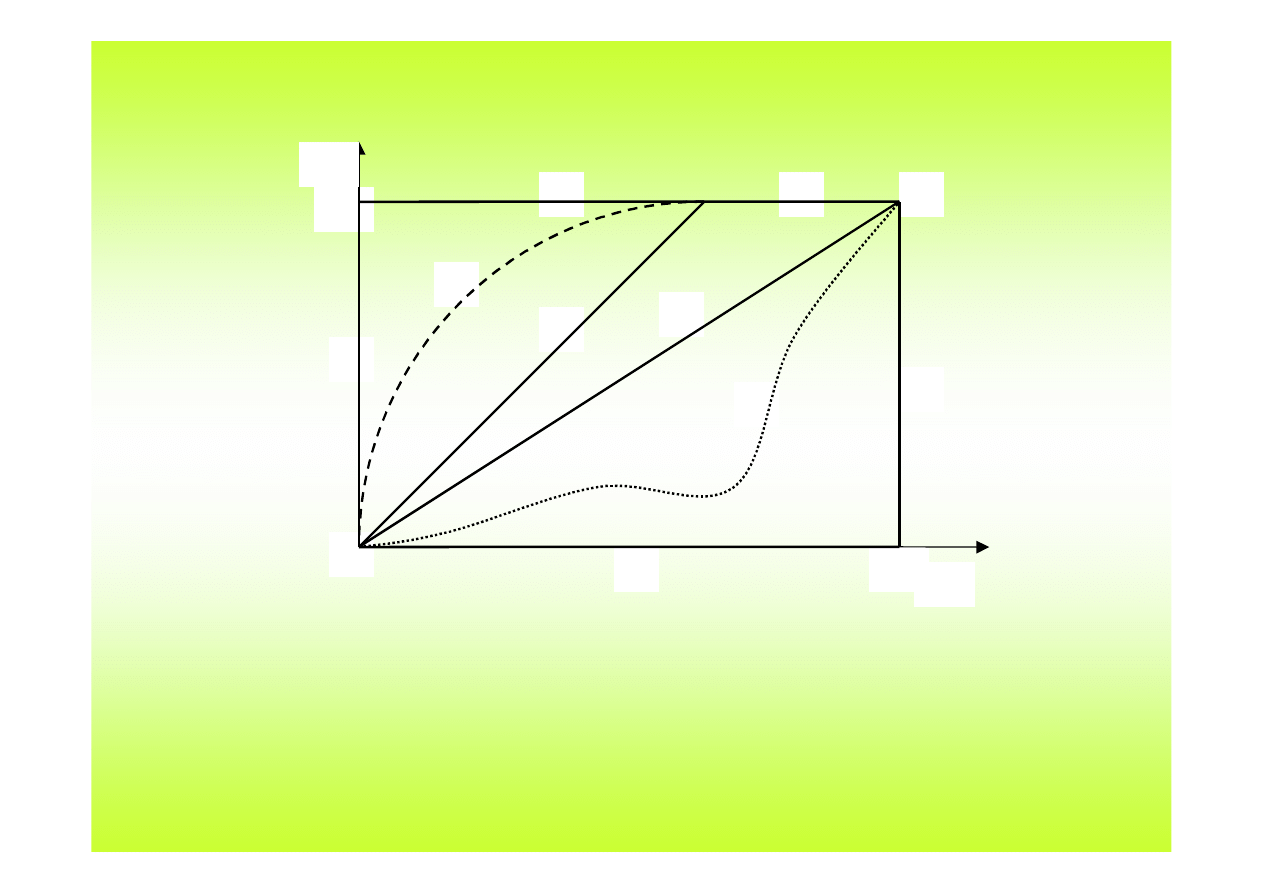
Rys. 5.2. Regulacja poło
ż
enia w zadaniu
przestawiania: 1 - z przeregulowaniem, 2 - bez
przeregulowania, ,
∆∆∆∆
x
z
- skok zadanej warto
ś
ci
poło
ż
enia, x(t) - zmiany poło
ż
enia, t
r1
, t
r2
- czasy
regulacji,
εεεε
s
- odchyłka statyczna regulacji
poło
ż
enia
Rys. 5.3. Regulacja poło
ż
enia w przypadku
nad
ąż
ania:
x
z
(t) – poło
ż
enie zadane, x
i
(t) –
poło
ż
enie istniej
ą
ce,
εεεε
(t) - odchyłka regulacji
1
2
a
′
b
′
a
′′
c
b
′′
d
e
g
1,2
2,1
Oś 1
Oś 2
f
Rys 5.4. Przestrze
ń
robocza robota kartezja
ń
skiego o dwóch osiach
i dwóch zaprogramowanych punktach na ka
ż
dej z osi
5.2. Klasyfikacja
układów sterowania
Sterowanie w osiach
dyskretnych
Pozycjonowanie w osiach
serwonapędowych
Koordynacja pracy
serwonapędów
Sprawdzanie stanu wejść
technologicznych
Sterowanie wyjściami
technologicznymi
Możliwości rozgałęzień
programu pracy
Obsługa ręczna
Programowanie ręczne
Programowanie PTP
Programowanie CP
Układy sterowania robotów
Układy sterowania robotów
Sterowanie
sekwencyjne
Sterowanie
teleoperatorów
Sterowanie
numeryczne
Zadania
Sterowanie
Zadania
Sterowanie
Obsługa
Programowani
e
Obsługa
Programowanie
Hard`-
warowe
Przekaźni
kowe
PLC
Mikropro-
cesorowe

5.3. Układy sterowania teleoperatorów
Układy sterowania teleoperatorów, w których człowiek stanowi jeden z
elementów procesu sterowania, ze wzgl
ę
du na sposób realizacji
zamierze
ń
operatora mo
ż
na sklasyfikowa
ć
na:
−
przyciskowe,
−
kopiuj
ą
ce zadawan
ą
pozycj
ę
,
−
kopiuj
ą
ce zadawan
ą
pozycj
ę
z siłowym sprz
ęż
eniem zwrotnym,
−
bioelektryczne
.
5.4. Programowalne sterowniki logiczne PLC
Moduł sterowania
silnikami
skokowymi
Moduł wejść
cyfrowych
Moduł wyjść
cyfrowych
Moduł wejść
analogowych
stało-
prądowych
Moduł wyjść
analogowych stało-
prądowych
Moduł wejść
analogowych
zmienno-
prądowych
Moduł wyjść
analogowych
zmienno-
prądowych
Komputer
centralny
Układ sterowania
numerycznego
Inne PLC
Silniki
skokowe
Interfejs
komunikacyjny
Pamięć
programu
Programator
PLC
Interfejs
programatora
Procesor
logiczny
Magistrala systemowa
Instrukcje Krok
CD
=
~
CD
=
~
Rys. 5.6. Struktura sterownika PLC
Norma dopuszcza i formalizuje pi
ęć
sposobów opisu programu:
−
lista instrukcji (ang. IL - Instruction List),
−
tekst strukturalny (ang. ST - Structured Text),
−
schemat zestykowy (ang. LD - Ladder Diagram),
−
funkcjonalny schemat blokowy (ang. FBD - Fuction Block Diagram),
−
schemat sekwencji funkcji (ang. SFC - Sequntial Function Chart).
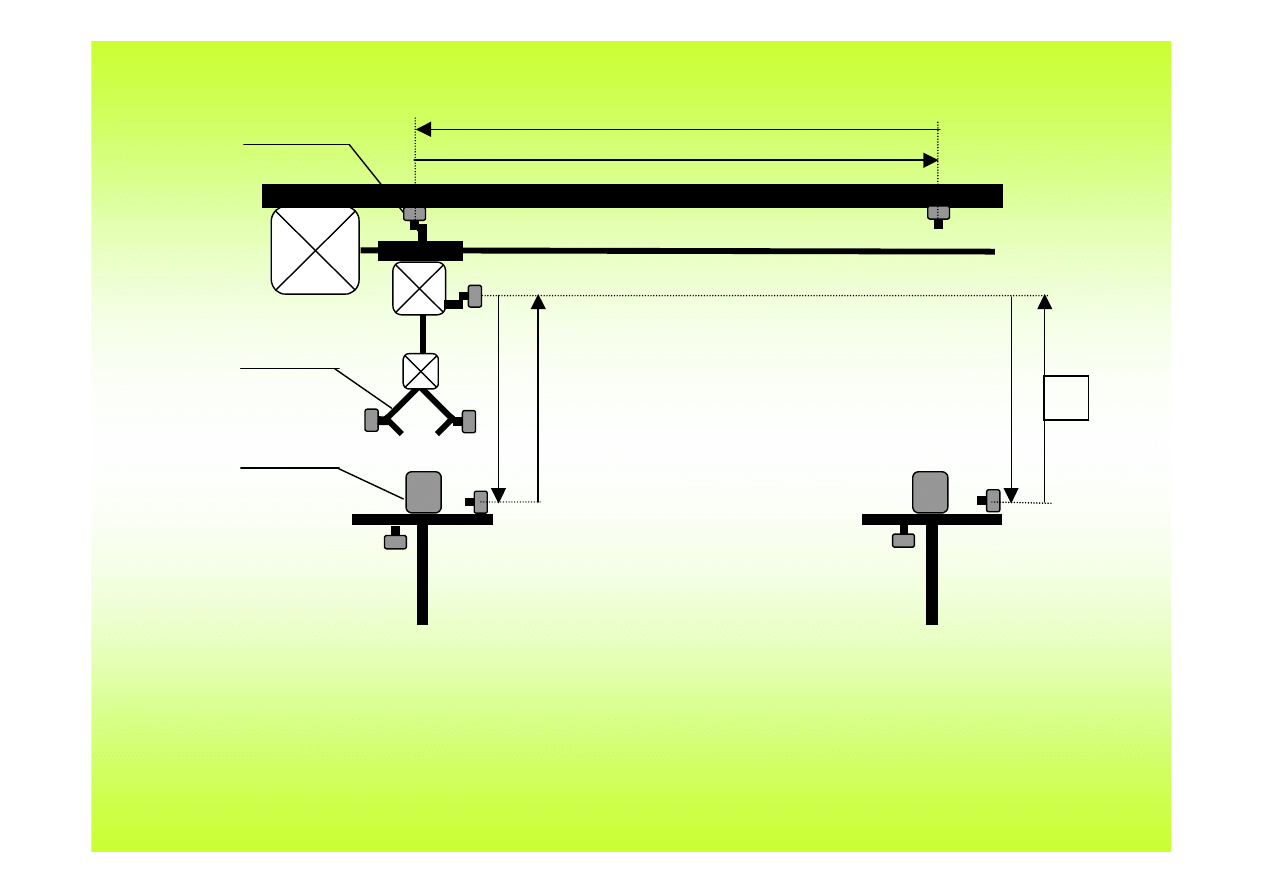
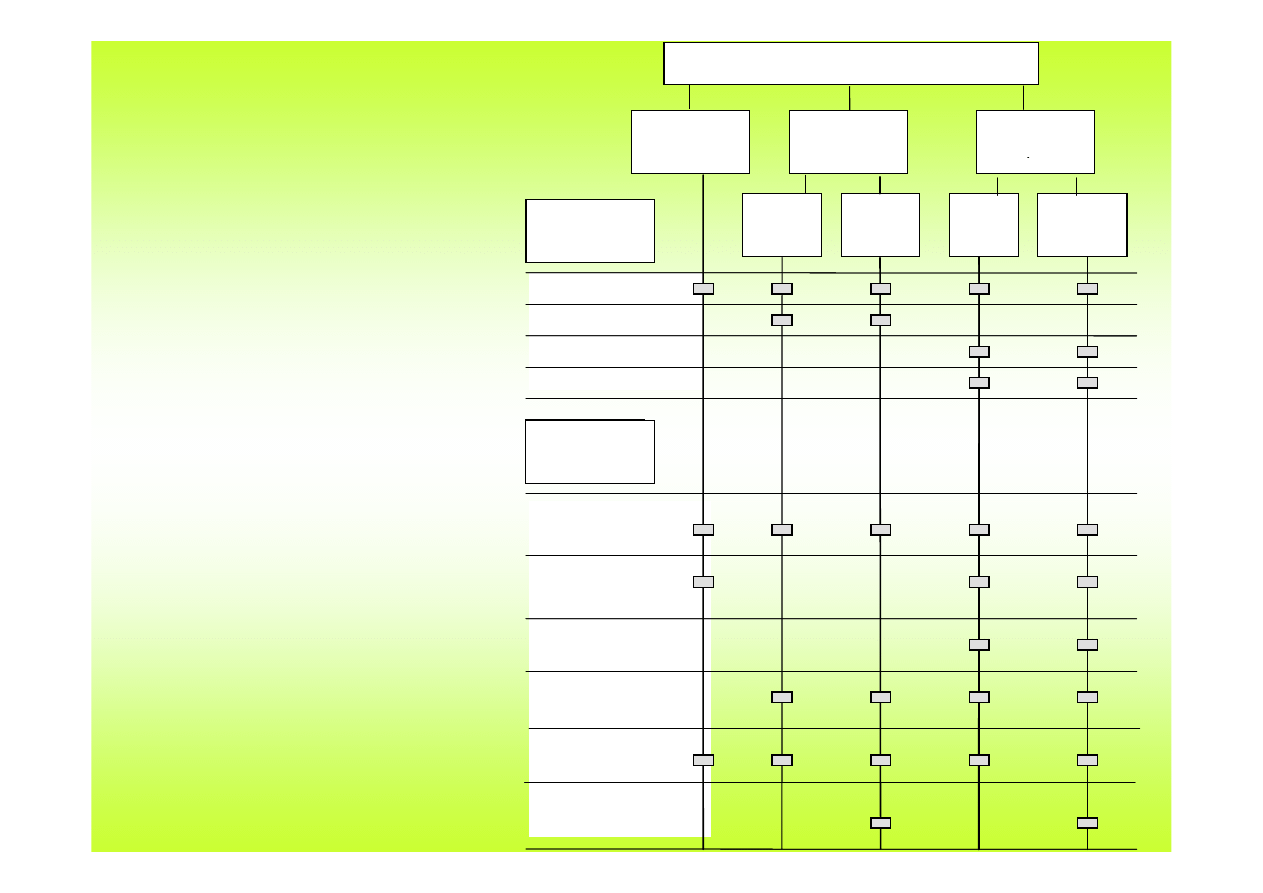
K1
M2
M3
K2
K5
K3
K4
K7
K9
K8
K6
Paleta 1
Paleta 2
Przedmiot
Chwytak
1
1
2
3
4
5
6
Pozycja
bazowa
M1
Rys. 5.7. Schemat działania robota bramowego liniowego
K1
M2
M3
K2
K5
K3
K4
K7
K9
K8
K6
Paleta 1
Paleta 2
Przedmiot
Chwytak
1
1
2
3
4
5
6
Pozycja
bazowa
M1
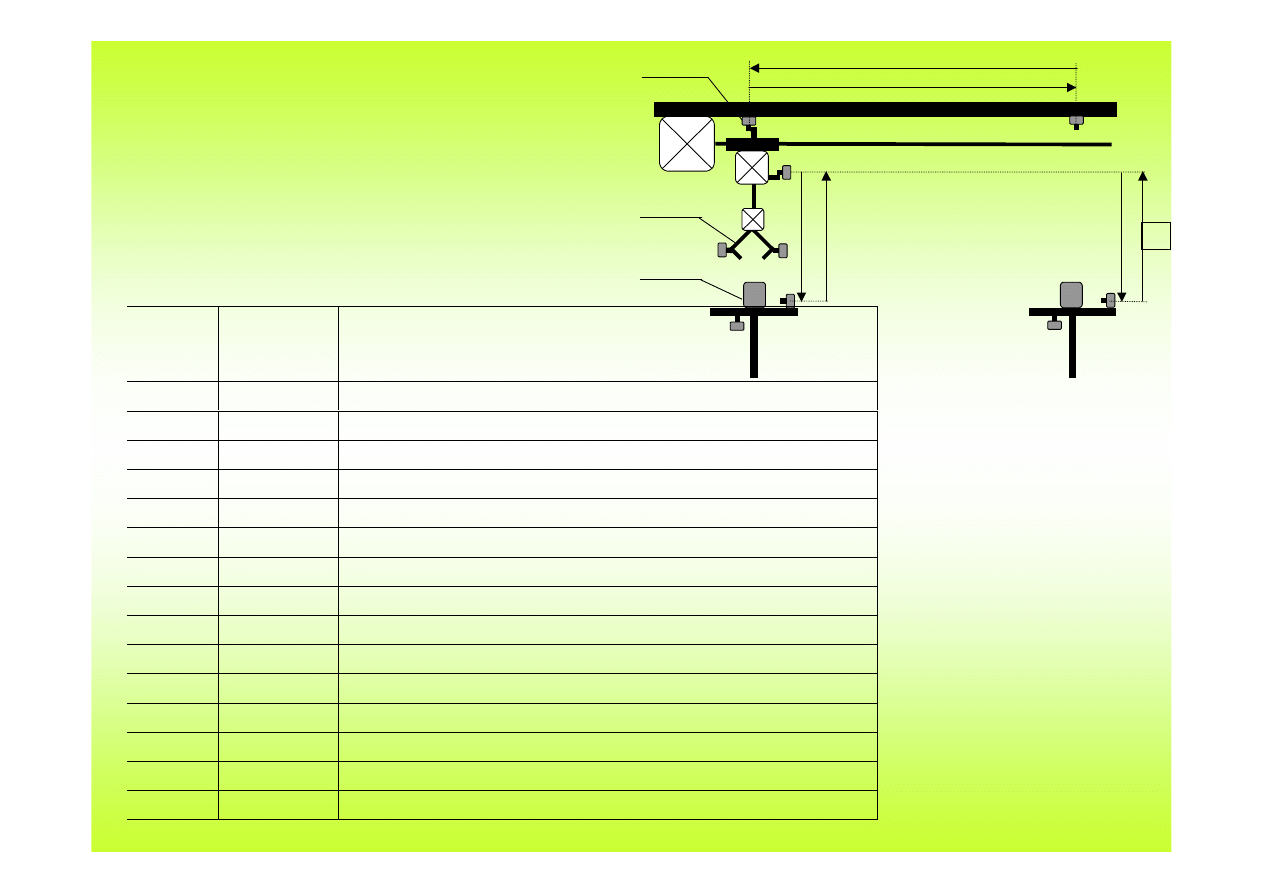
Oznaczenie
urz
ą
dzenia
Oznaczenie
styków
Funkcja
S1
S11, S12
Stycznik wł
ą
czaj
ą
cy silnik M1 do przesuwu w prawo
S2
S21, S22
Stycznik wł
ą
czaj
ą
cy silnik M1 do przesuwu w lewo
S3
S31, S32
Stycznik wł
ą
czaj
ą
cy silnik M2 do opuszczenia chwytaka
S4
S41, S42
Stycznik wł
ą
czaj
ą
cy silnik M2 do podniesienia chwytaka
S5
S51
Stycznik wł
ą
czaj
ą
cy silnik M3 do zamkni
ę
cia chwytaka
S6
S61
Stycznik wł
ą
czaj
ą
cy silnik M3 do otwarcia chwytaka
K1
K11, K12
Ł
ą
cznik okre
ś
laj
ą
cy poło
ż
enie wózka w pozycji lewo
K2
K21, K22
Ł
ą
cznik okre
ś
laj
ą
cy poło
ż
enie wózka w pozycji prawo
K3
K31, K32
Ł
ą
cznik okre
ś
laj
ą
cy poło
ż
enie kolumny w pozycji dół nad palet
ą
nr 1
K4
K41, K42
Ł
ą
cznik okre
ś
laj
ą
cy poło
ż
enie kolumny w pozycji dół nad palet
ą
nr 2
K5
K51, K52
Ł
ą
cznik okre
ś
laj
ą
cy poło
ż
enie kolumny w pozycji na górze
K6
K61
Ł
ą
cznik okre
ś
laj
ą
cego obecno
ść
przedmiotu na palecie nr 1
K7
K71
Ł
ą
cznik okre
ś
laj
ą
cy obecno
ść
przedmiotu na palecie nr 2
K8
K81, K82, K83 Ł
ą
cznik okre
ś
laj
ą
cy stan chwytaka (otwarty)
K9
K91, K92, K93 Ł
ą
cznik okre
ś
laj
ą
cy stan chwytaka (zamkni
ę
ty)
S31
K11 K61 K81 K51
K21 K91 K71 K51
K31 K41 S42
K31
S61 K92
K32 K92
12
11
10
K52 S32
K21 K83
S21
K11 K93
S11
S41
S4
K52 S32
S22 K22
S1
K42
S51 K82
S6
S12 K12
S2
1
2
3
4
5
6
7
8
9
S3
S5
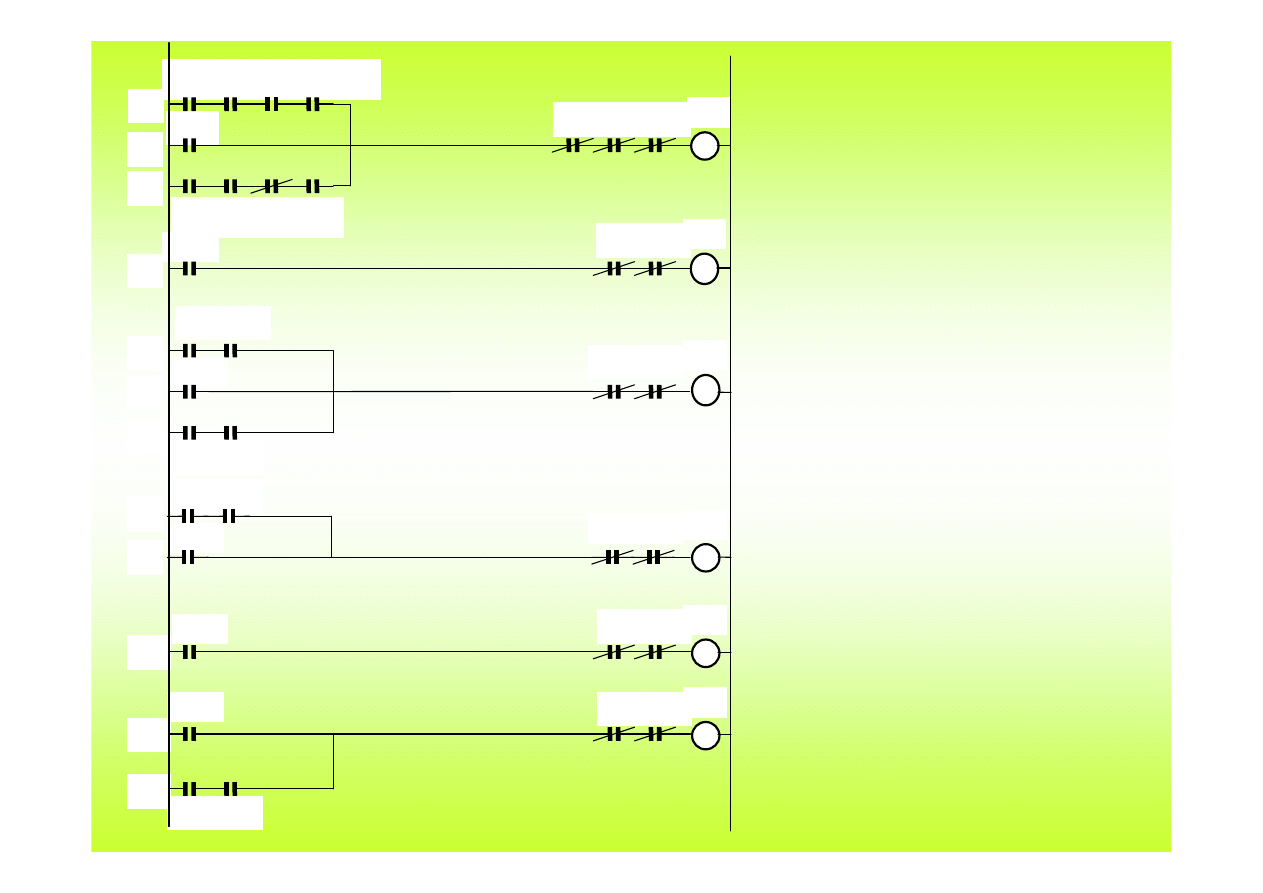
Linie (1, 2, 3)
Je
ż
eli (K11 i K61 i K81 i K51 lub
S31 lub K21 i K91 i nie K71 i nie
K51) i nie K31 i nie K41 i nie S42 to
S3
Linia (4)
Je
ż
eli K31 i nie S61 i nie K92 to S5
Linie (5, 6, 7)
Je
ż
eli (K32 i K92 lub S41 lub K52 i
S32) i nie K52 i nie S32 to S4
Linie (8, 9)
Je
ż
eli (K11 i K93) lub S11) i nie S22
i nie K22 to S1
Linia (10)
Je
ż
eli K42 i nie S51 i nie K82 to S6
Linie (11 i 12)
Je
ż
eli (S21 lub K21 i K83) i nie S12 i
nie K12 to S2
S11
S12
S21
S22
S31
S32
S41
S42
S51
S61
K11
K12
K21
K22
K31
K32
K41
K42
K51
K52
K61
K71
K81
K82
K83
K91
K92
K93
S1
S2
S3
S4
S5
S6
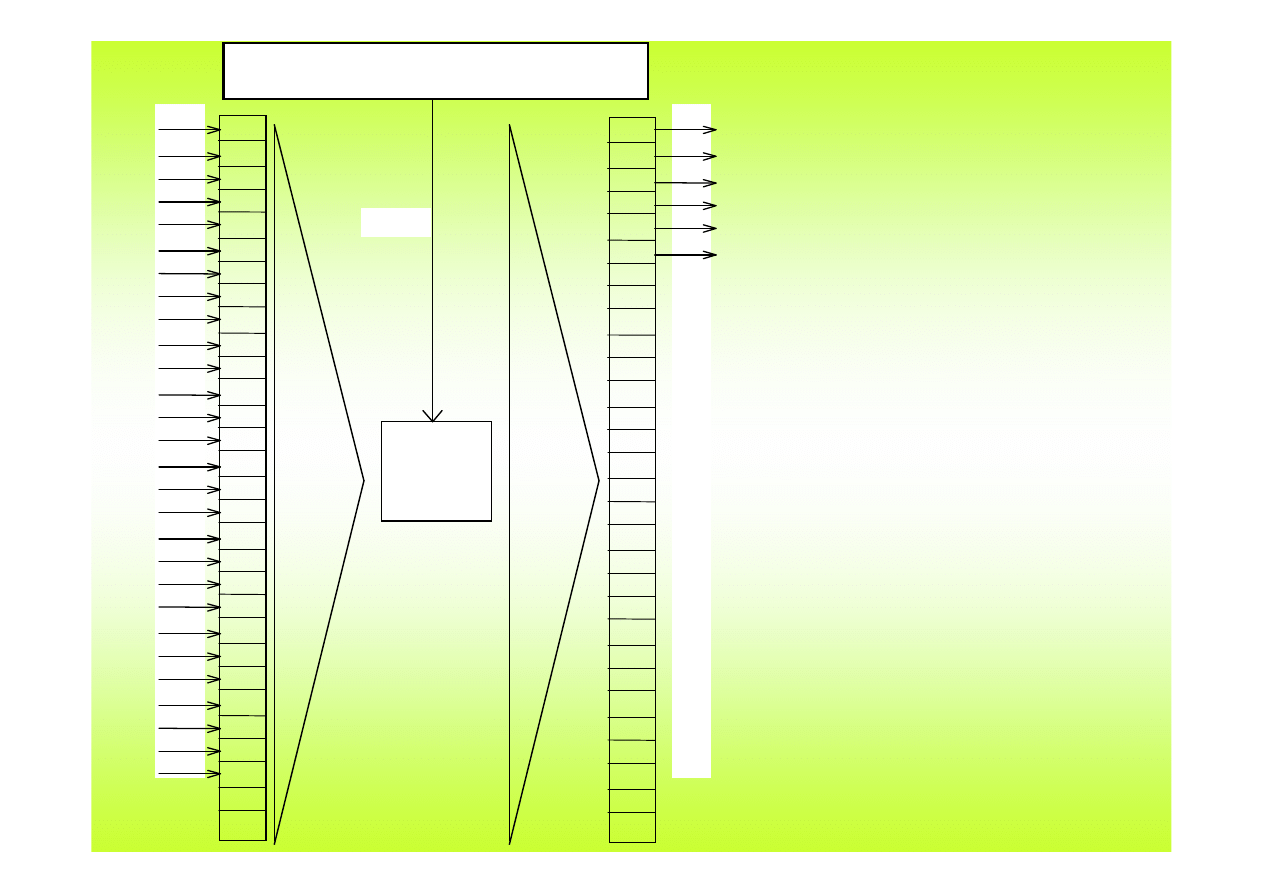
P RO CE S O R
PAM IĘ Ć PRO G RAM U
Instrukcje
I01
I02
I03
I04
I05
I06
I07
I08
I09
I10
I11
I12
I13
I14
I15
I16
I17
I18
I19
I20
I21
I22
I23
I24
I25
I26
I27
I28
In n
O01
O02
O03
O04
O05
O06
O07
O08
O09
O10
O11
O12
O13
O14
O15
O16
O17
O18
O19
O20
O21
O22
O23
O24
O25
O26
O27
O28
On n
I
wej
ś
cie (Input),
O
wyj
ś
cie (Output).
oraz symbole operacji logicznych:
·
działanie typu i,
+
działanie typu lub,
/
negacja,
( )
nawiasy,
=
wykonanie.
Je
ż
eli (K11 i K61 i K81 i K51 lub S31
lub K21 i K91 i nie K71 i nie K51) i
nie K31 i nie K41 i nie S42 to S3
Je
ż
eli K31 i nie S61 i nie K92 to S5
Je
ż
eli (K32 i K92 lub S41 lub K52 i
S32) i nie K52 i nie S32 to S4
Je
ż
eli (K11 i K93) lub S11) i nie S22 i
nie K22 to S1
Je
ż
eli K42 i nie S51 i nie K82 to S6
Je
ż
eli (S21 lub K21 i K83) i nie S12 i nie
K12 to S2
(I11·I21·I23·I19+I05)+(I13·I26·/I22·/I19)·/I
15·/I17·I08 = O03
I15·/I10·/I27 = O05
(I16·I27+I07+I20·I06)·/I20·/I06 = O04
(I11·I28+I01)·/I04·/I14 = O01
I18·/I09·/I24 = O06
(I03+I13·I25)·/I02·/I12 = O02
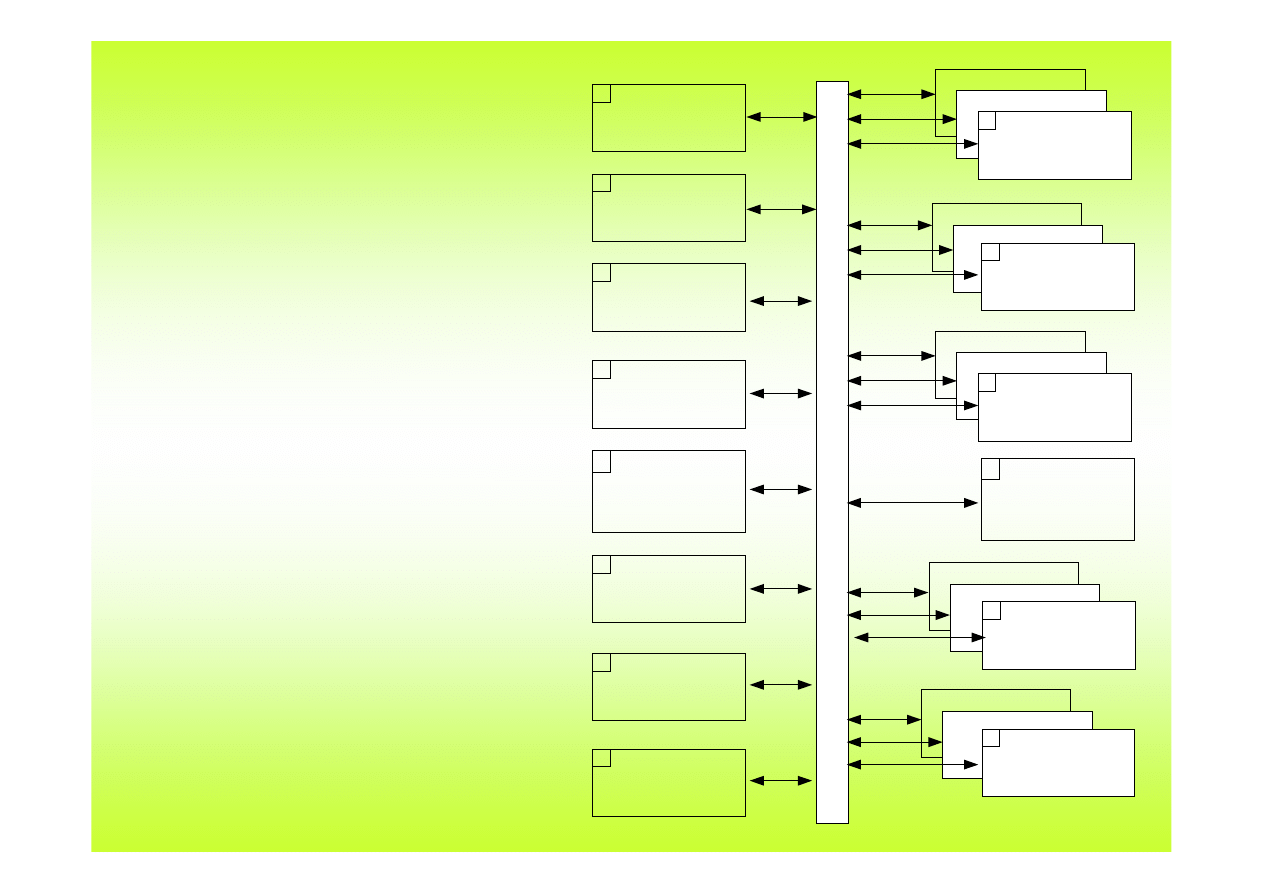
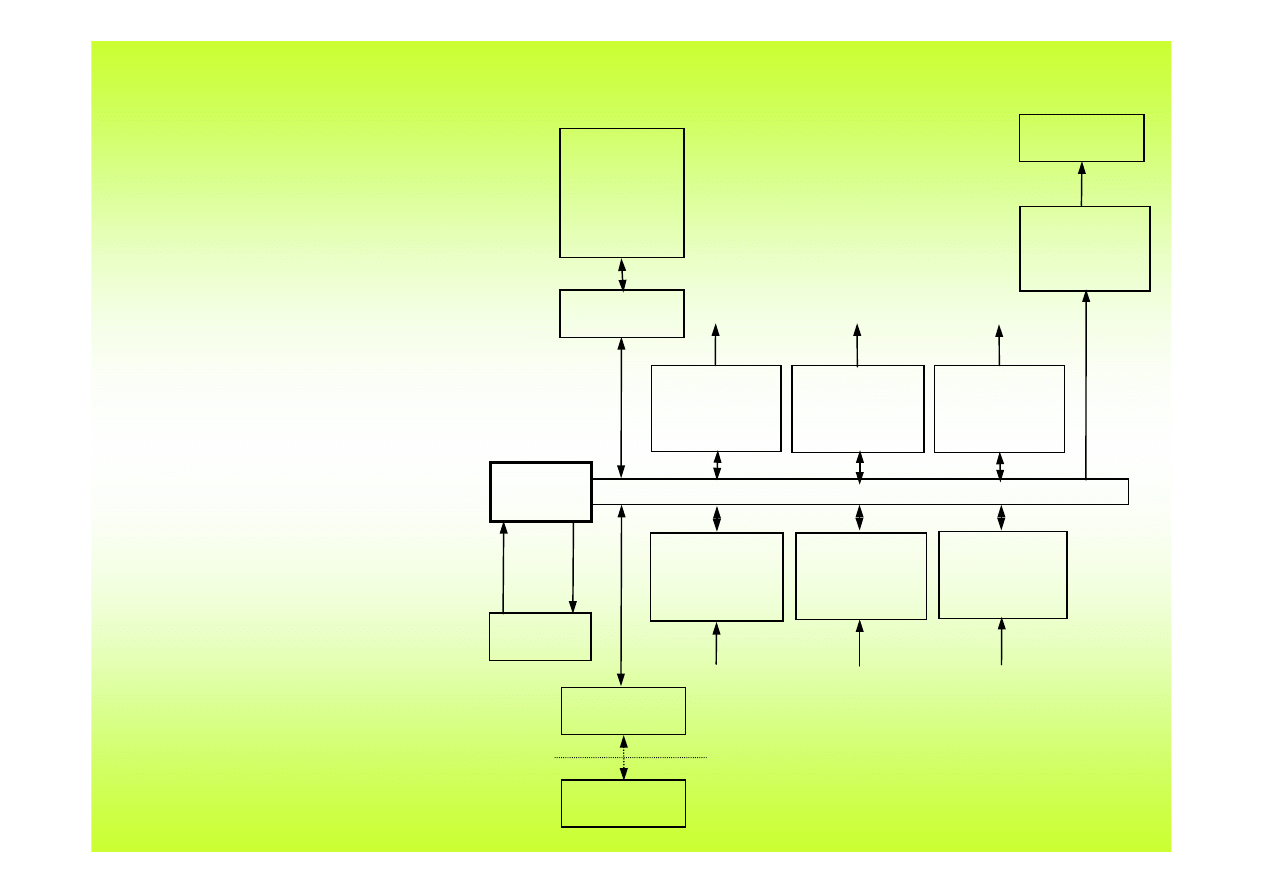
5.5. Układy sterowania
numerycznego komputerowego
Interfejs komunikacji
z innym komputerami
lub układami
sterowania
5
Sterowniki
serwonapędów
13
Sterowniki
napędów z silnikami
skokowymi
14
Procesor PLC
6
Pamięć
RAM + EPROM
2
Pakiet kontroli
3
Procesor centralny
1
Procesor sterowania
ruchami w osiach
pozycjonowanych
płynnie (Interpolator)
12
Sterownik ręczny
(Panel programatora)
8
Interfejs programatora
7
Sterownik pamięci
dyskowych
4
C
e
n
t
r
a
l
n
a
m
a
g
i
s
t
r
a
l
a
s
y
s
t
e
m
o
w
a
Pakiety wejść i wyjść
dwustanowych
9
Pakiety wejść i wyjść
analogowych
- 10V
+ 10V
10
Pakiety wejść i wyjść
cyfrowych
11
Rys. 5.10. Architektura
wielomikroprocesorowych układów
sterowania robotów przemysłowych
5.6. Programowanie robotów przez nauczanie
5.7. Programowanie robotów off-line
5.8. Symulatory robotów przemysłowych
5.9. Sterowanie autonomicznych robotów mobilnych
Wyszukiwarka
Podobne podstrony:
CHRAPEK,podstawy robotyki, Sterowanie robotów przemys owych
Programowanie robotów przemysłowych FANUC
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
Sterowanie robotów
(URZYDZENIA CHWYTAJYCE ROBOTÓW PRZEMYSLOWYCH)
9 Efektory robotów przemysłowych
CHRAPEK,podstawy robotyki, Przyk ady konstrukcji robotów przemys owych
NAPĘDY ROBOTÓW PRZEMYSŁOWYCH
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
sterowanie robotow
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
sprawko robotyka, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
więcej podobnych podstron