Przedmiot: |
„Podstawy Robotyki” |
Data: 21.05.2013 |
Temat ćwiczenia: |
|
|
Imię i nazwisko: |
1.Hubert Szatara 2.Damian Wilimberg 3.Sebastian Szalonek |
Kier./ sem. AiR / IV |
|
|
Gr/Z 12A4/II |


Temat
Teoria
Opis manipulatora portalowego
Badanie dokładności pozycjonowania(dołączone na osobnej kartce)
Schemat kinematyczny chwytaka(na osobnej kartce rysowany ręcznie)
Wnioski
1. Badanie manipulatora portalowego
2. Teoria
Pierwsze manipulatory nie posiadały własnego układu sterowania, sterowanie odbywało się ręcznie, różne maszyny budowlane, urządzenia transportowe, np. wozki widłowe, telemanipulatory, wszystkie urzadzenia które przenoszą naturalny ruch ręki człowieka na urządzenie wykonawcze, przeważnie ze zwielokrotnioną siłą nazywamy manipulatorem.
Postepujący rozwój manipulatorów umożliwił zastosowanie w nich, poprzez wbudowanie pamięci, możliwości sterowania programowego. Pozwoliło to na zastosowanie manipulatorów przy wykonywaniu powtarzalnych czynności które muszą być wykonywane z określoną dokładnością ( np. przy taśmach montażowych), jednak dopiero wprowadzenie robotów ze zmiennym programem, których sterowanie opiera się na sprzężeniu zwrotnym między rzeczywistym położenie w przestrzeni roboczej narzędzia i obrabianego detalu a programem kolejnych czynności zapisanych w pamięci manipulatory mogą wykonywać swoje zadanie z dużą szybkością i zadaną dokładnością, czego przykładem by ł manipulator badany na ćwiczeniu laboratoryjnym, który współpracując z obrabiarką cnc pełnił funkcję automatycznego podajnika obrabianych elementów.
Manipulator przemysłowy - urządzenie przeznaczone do wspomagania albo częściowego lub całkowitego zastępowania człowieka przy wykonywaniu czynności manipulacyjnych w przemysłowym procesie produkcyjnym, sterowane ręcznie lub automatycznie za pomocą własnego układu sterującego stałoprogamowanego lub zewnętrznego układu sterującego.
Robot przemysłowy - urządzenie automatyczne przeznaczone do wykonywania czynności manipulacyjnych w przemysłowym procesie produkcyjnym., mające układ ruchu składający się z co najmniej trzech zespołow ruchu i własny układ sterujący programowalny ( posiadający możliwość programowanej zmiany cyklu pracy)
Główne składowe części robota:
1) Część mechaniczna
Podstawa - płyta lub inna konstrukcja, która stanowi pierwszy człon układu kinematycznego lub z ktorą jest połaczony w sposób nieruchomy pierwszy człon układu kinematycznego robota ( manipulatora)
Układ kinematyczny - układd przenoszący ruchy od zespołow napędowych do elementu roboczego będącego zbiorem członów mechanicznych połaczonych ruchowo
Układ ruchu - układ wykonujący pożądane zmiany położenia elementu roboczego składający się z układu kinematycznego oraz napędów wprawiających w ruch odpowiednie człony ukadu kinematycznego. W przypadku manipulatorow mobilnych mogących się przemieszczać względem otoczenia do układu ruchu zalicza się także pojazd mechaniczny
Ramię - część układu ruchu której podstawowym zadaniem jest pozycjonowanie przyłącza
Kiść - część układu ruchu między ramieniem a elementem roboczym której zadaniem jest orientowanie elementu roboczego lub wprowadzanie niewielkich zmian jego pozycji. Są to dodatkowe osie robota, dostępne w konfiguracji 1,2 lub 3 osie, rozszerzające możliwości ruchowe głownych osi manipulatora
Zespół ruchu - część układu ruchu złożona z jednego napędu i członów układu kinematycznego których położenie względem siebie zmienia ten napęd
Przyłącze manipulatora - miejsce na ostatnim członie układu kinematycznego robota ( manipulatora) przemysłowego przeznaczone do mocowania elementu roboczego
Element roboczy - efektor - urządzenie mocowane do przyłacza robota (manipulatora) przemysłowego. Istnieją dwa typy efektorów: chwytaki służace do uchwycenia obiektu manipulacji, utrzymania go podczas manipulacji i uwolnienia po jej zakończeniu oraz końcówka robocza, która wykonuje określoną pracę, np. wkrętak, pistolet malarski, palnik spawalniczy itp.
2) Część elektryczna:
Układ sterujacy - urządzenie działające automatycznie przeprogramowywane, wytwarzające sygnały sterujące napędami robota, a także urządzenie współpracujące z robotem. Praktycznie są to: komputer i układy we/wy, które pozwalają komunikować się z robotem lub innymi urzadzeniami obecnymi w przestrzeni roboczej. Komputer posiada określony język programowania i wyspecjalizowany zbiór procedur. Układ sterowania może być wyposażony w przyciski które umożliwiają reczne sterowanie pojedynczą osią robota
Panel programowania - przenośna część układu sterującego robota przemysłowego za pomocą którego może on być programowany lub sterowany ręcznie
Serwomotor - urządzenie dostarczające energie mechaniczną, np. siłownik hydrauliczny, silnik elektryczny wraz z koderem umocowanym na wale, który podaje bieżącą pozycję wału do układu sterującego
Klasyfikacja robotów przemysłowych ze względu na sposób sterowania:
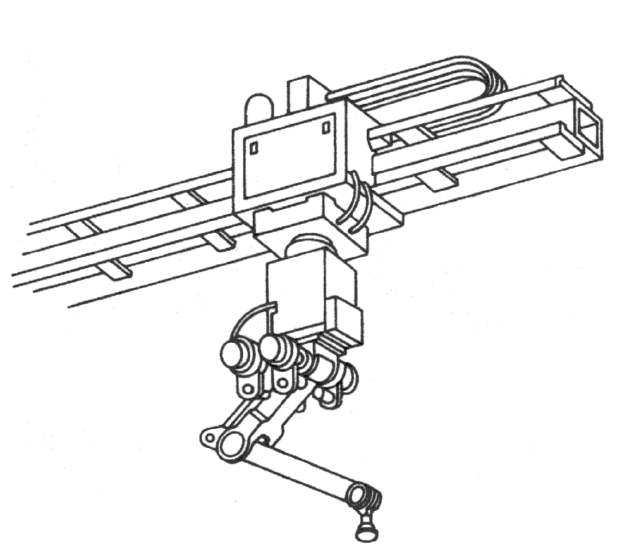
3. Opis manipulatora portalowego
Manipulator portalowy składa się z napędu liniowego oraz wysięgnikowego. Doskonale sprawdzają się w systemach o dużym skoku, często w operacjach podawania elementów o wadze do 15kg (obciążenie robocze do 25kg) oraz tam gdzie są zwiększone wymagania względem wytrzymałości na skręcenie.
7. Wnioski
Manipulator portalowy jest doskonałym narzędziem do współpracy z wieloma typami obrabiarek i zwiększa ich wydajność poprzez właściwą obsługę (np. w tokarce transport przedmiotów obrabianych do komory obróbki). Pomiary dokładności pozycjonowania pokazały że manipulator portalowy jest bardzo dokładnym narzędziem. Eliminuje to zatrudnianie człowieka.
MANIPULATORY
STEROWANIE
RĘCZNE
STEROWANIE
AUTOMATYCZNE
Z WŁASNYM STAŁO-
PROGRAMOWANYM
UKŁADEM STERUJĄCYM
BEZ WŁASNEGO
UKŁADU
STERUJĄCEGO
SERWOMANI-
PULATORY
ROBOTY ZŁOŻONE Z WŁASNYM UKŁADEM STERUJĄCYM I ZE ZMIENNYM PROGRAMEM
TELEMANI-
PULATORY
ZE STROWANIEM ADAPTA- CYJNYM Z AUTOMATYCZNĄ ZMIANĄ PROGRAMU
ZE STEROWANIEM CIĄGŁYM WZDŁUŻ ZADANEJ TRAJEKTORII
ZE STEROWANIEM OD PUNKTU DO PUNKTU
Wyszukiwarka
Podobne podstrony:
Projekt 2 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt 1 - 3dof, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Projekt3, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt góra, R
projekt1hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt g
projekt 1 hubert, Automatyka i Robotyka studia, 3 rok, ELEMENTY I UKŁADY STEROWANIA ROBOTÓW, projekt
Sprawozdanie L1 (1), Automatyka i Robotyka studia, 3 rok, STEROWANIE PROCESAMI CIĄGŁYMI
analogowe sprawko cw B, Automatyka i robotyka air pwr, VI SEMESTR, Analogowe i cyfr. syst. pom
Metody sprawko calka, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
sprawko cw3, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, teoria automatow
Automatyka SPRAWKO nandy, Automatyka i robotyka air pwr, IV SEMESTR, Podstawy automatyki 2, laborki
sprawko moo1, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce, labki
sprawko nowe, Automatyka i Robotyka, Semestr III, Metody Obliczeniowe Optymalizacji, Gotowce, labki
sprawko 2 izy, Automatyka i robotyka air pwr, VI SEMESTR, Notatki.. z ASE, metody numeryczne, lab 2
sprawko 7 calkowanie, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
Falownik-sprawko, Politechnika Poznańska (PP), Elementy i układy automatyzacji maszyn, Laboratorium,
Sprawko liniow, Automatyka i Robotyka, Semestr 5, EiN, sprawka
SPRAWKO Aitken, Automatyka i robotyka air pwr, VI SEMESTR, Metody numeryczne
więcej podobnych podstron