Podstawy sterowania robotów i maszyn
Temat : INTERPOLACJA
Jakub Pędzik
Gr III
AiR III sem VI
WSTĘP TEORETYCZNY
Strategia działań interpolacyjnych polega na podziale całego odcinka realizowanej drogi l pomiędzy pozycjami początku Pp i końca Pk na etapy, zwane sekcjami wyznaczanymi w stałych odcinkach czasu. Sekcje wyznaczają kolejne pozycje pośrednie - podporowe trajektorii , czyli położenia w przestrzeni , przez które musi przejść planowana trajektoria , aby pożądany jej kształt został osiągnięty. Etap ten nazywany jest planowaniem trajektorii. Uzyskiwane na podstawie wyliczeń interpolacyjnych współrzędne pozycji pośrednich są wartościami dyskretnymi , a nie ciągłymi. Wszystkie parametry potrzebne do wyliczeń ustalane są dla konkretnych warunków czasu i miejsca. Otrzymujemy w ten sposób współrzędne początku i końca poszczególnych sekcji. Położenie współrzędnych początku i końca sekcji nie decydują wyłącznie o jakości trajektorii. W obrębie każdej sekcji , tj. pomiędzy dwoma kolejnymi położeniami wyznaczającymi jej początek i koniec ,realizowane zadania ruchu robota jest zadaniem typowym czyli zgodne z podstawowym algorytmem sterowania PTP .Dokładność odtworzenia wzorca pożądanej trajektorii zależy głównie od szybkości programowej ruchu manipulatora. Istotnym parametrem podziału planowanej drogi robota na sekcje jest stały interwał czasowy wzglądem którego dokonywane jest wyznaczanie kolejnych sekcji niezależnie od szybkości robota.
Zadanie
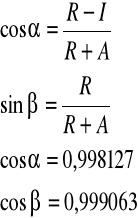
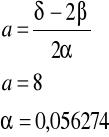
Dane
R=320
δ=63
I=0.3
A=0.3
![]()
![]()
![]()
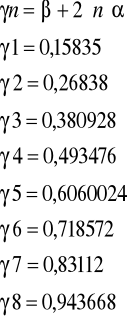
X1=316,4188
X2=308,8338
X3=297,3409
X4=282,0855
X5=263,2607
X6=241,1048
X7=215,8979
X8=187,9591
Y1=49,71131
Y2=84,93394
Y3=119,0818
Y4=151,7229
Y5=182,4442
Y6=210,8568
Y7=236,6013
Y8=259,352
Wyszukiwarka
Podobne podstrony:
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
Zadanie proste 2, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy s
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
Pytania 2, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
PKM pytania-krzych, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
Ściąga PKM(1), Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria, PKM
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
PODSTAWY KONSTRUKCJI MASZYN sruby, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Te
KOMPLET chwytak, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, projekt chwytaka
Pytania, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
więcej podobnych podstron