Wydział: MT Gliwice, dn. 2.04.2001r
Kierunek: AiR
Sem.: VI
Gr. Dziek.: III
Mateja Mateusz
Podstawy Sterowania Robotów
Zadanie proste kinematyki
Wstęp teoretyczny
Skutecznym aparatem matematycznym wykorzystywanym w robotyce jest tzw. Notacja D-H (Denavita-Hartenberga), oparta na rachunku macierzowym. Służy ona do analiz względnego położenia w innym układzie. Wygodnie jest tu wprowadzić współrzędne jednorodne. Współrzędnymi jednorodnymi nazywać będziemy czwórkę dowolnych liczb spełniających warunek taki, że:
wszystkie nie mogą być jednocześnie równe zeru,
wszystkie są związane poprzez współrzędne kartezjański i zachodzi pomiędzy nimi relacja (dla warunku, że zawsze

),
![]()
![]()
![]()
.
Parametr ![]()
nazywany jest czasami współczynnikiem skali. Wykorzystując współrzędne jednorodne, wektor ![]()
opisujący położenie punktu w układzie kartezjańskim można teraz zapisać w postaci:
![]()
przy warunku, że ![]()
.
Rozważmy teraz przypadek, w którym pozycja P(x,y,z,a,b,c) jest zdefiniowana w układzie UB. Z kolei położenie układu UB w układzie UA jest określone wektorem położenia ![]()
. Zachodzi pytanie, jak można określić pozycję P układzie UA?
Aby to zagadnienie wyjaśnić, musimy zastanowić się najpierw nad sposobem zapisu formalnego orientacji (położenie określa wektor ![]()
). Orientację przestrzenną układu współrzędnych związanego z pozycją P określają trzy kąty a, b, c.
Ponieważ osie układu kartezjańskiego, przyjętego w naszych rozważaniach jako podstawowego, są do siebie wzajemnie prostopadłe, więc wektory jednostkowe tych osi również. Przyjmijmy zatem, ze orientację układu współrzędnych pozycji P, względem nieruchomego układu odniesienia wyraża tzw. Macierz kosinusów kierunkowych, gdzie każdy element tej macierzy jest rzutem wektora jednostkowego, związanego z układem obróconym na kierunek wektora jednostkowego układu odniesienia, co przedstawia iloczyn skalarny tych dwóch wektorów.
Wykorzystując macierz kosinusów kierunkowych można powiedzieć, że jeżeli znane jest położenie początku układu UB w układzie UA, znana jest macierz kosinusów kierunkowych C układu UB względem UA, to położenie dowolnej pozycji P określone w układzie UB można wyrazić UA poprzez zależność macierzową:
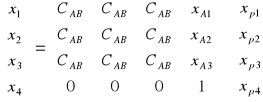
gdzie poszczególne parametry xn oznaczają współrzędne jednorodne, n=1,2,3,4, przy czym:
![]()
- położenie początku układu UB w układzie UA,
![]()
- wsp. Pozycji P wyrażone w układzie UB,
![]()
- wsp. Pozycji P w układzie UA,
![]()
- macierz kosinusów kierunkowych określających orientację układu UB względem UA.
Jak łatwo zauważyć, przedstawiona zależność zawiera w drugiej macierzy (o wymiarze 4x4) dodatkowy wiersz, nie omawiany wcześniej, składający się z trzech zer. Przez dodanie dodatkowego wiersza uzyskano macierz symetryczną 4x4, dzięki czemu umożliwiono wykonanie iloczynu macierzowego odpowiednio do zasad rachunku macierzowego.
Jeżeli przyjmiemy, że:
![]()
,
uzyskamy równość czwartej wsp. w obu układach, wtedy:
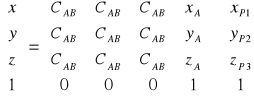
gdzie parametry x, y, z oznaczają w odpowiednio wartości współrzędnych wyrażone w odpowiednim układzie wsp.
Powyższe wyrażenie opisuje ogólna zasadę, która mówi, że przemieszczenie dokonane w jednym układzie, a wyrażone w drugim jest równe iloczynowi macierzy orientacji i położenia drugiego układu względem pierwszego oraz wektora położenia w drugim układzie. Proces określania współrzędnych jakiegoś elementu w jednym układzie współrzędnych na podstawie znajomości położenia (relacji) tego układu w innym nazywamy przekształceniem lub transformacją współrzędnych. Proces wyrażania układu UB względem układu UA będziemy oznaczać jako TAB (transformacja).
Zadanie
Znaleźć współrzędne punktu leżącego na końcu ostatniego ogniwa.
Dane:
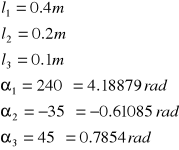
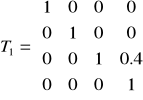
Macierz rotacji pierwszego układu dana jest wzorem
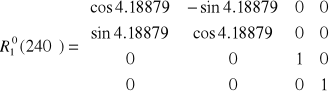
,
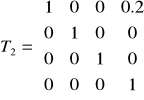
natomiast macierz przesunięcia układu:
.
Dla drugiego układu (prostopadłego do poprzedniego - γ=90°) macierz obrotu wygląda następująco:
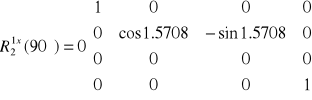
,
macierz transformacji
.
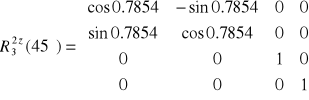
Macierz rotacji następnego układu (bez przesunięcia):
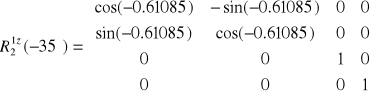
.
Macierze (rotacji i transformacji) czwartego pokazano poniżej
,
.
Mając wszystkie macierze rotacji i transformacji, możemy przystąpić do obliczenia wektora punktu (współrzędnych szukanego punktu).
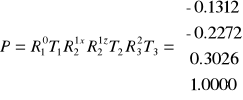
Wartości współrzędnych wyliczonych metodą wykreślną podano poniżej:
x=-0.1200m
y=-0.2025m
z=0.3650m
Jak widać, największy błąd sięga około 6cm. Mógł on zostać spowodowany pewną niedokładnością przyrządów (zwłaszcza kątomierza), co w połączeniu z podziałką 1:2,5 zaowocowało tak dużym błędem. Należy jeszcze przypomnieć, że w wartości współrzędnej „z”, zawarte są błędy pochodzące od wsp. „x” i „y”. Współrzędna zetowa została wyznaczona jako ostatnia, ponieważ wcześniej należało ustalić długości dwóch ostatnich ramion robota (ich rzutów na oś y).
Wyszukiwarka
Podobne podstrony:
projekt 2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
projekt 1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt2-Proste zadanie kinematyki
Interpolacja, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Podstawy stero
robocik, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn, Projekt2
mój projekt, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
mój projekt KB, Automatyka i Robotyka, Semestr I, Podstawy Sterowania Robotów i Maszyn
interpolacja projekt, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacje projekt2, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
interpolacja projekt1, Automatyka i Robotyka, Semestr 1, Podstawy Sterowania, projekt1-Interpolacja
tsis kolos troche pytan, Automatyka i Robotyka, Semestr 4, Technologia sterowania
PKM - opracowania roznych pytan na egzamin 6, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji
projekt dla rudego, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Projekt
pnom wyklad11, Automatyka i Robotyka, Semestr 1, Podstawy Nauki o materialach, Wyklady
pnom - sciaga, Automatyka i Robotyka, Semestr 1, Podstawy Nauki o materialach, stopy
Pytania 2, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Pytania i pomoce
opracowanie TSS, Automatyka i Robotyka, Semestr 4, Technologia sterowania
tss, Automatyka i Robotyka, Semestr 4, Technologia sterowania
PKM pytania-krzych, Automatyka i Robotyka, Semestr 4, Podstawy konstrukcji maszyn, Teoria
więcej podobnych podstron