
1
Systemy operacyjne
Zarządzanie procesami
Wykład 3
2
Planowanie procesów
Celem wieloprogramowania jest jak najlepsze
wykorzystanie procesora - powinien on zawsze
wykonywać jakiś proces. W systemie
jednoprocesorowym może być tylko jeden proces
aktywny. Wszystkie pozostałe procesy muszą czekać do
czasu, aż procesor będzie wolny i będzie można
przydzielić go jednemu z nich. Zapewnienie
najwyższej przepustowości procesora (liczba procesów
kończonych w jednostce czasu) wymaga planowania
przydziału procesora dla kolejnych procesów.
W podziale czasu przełączanie procesora do
procesów powinno następować tak często, aby każdy z
wykonywanych programów mógł współpracować z
użytkownikami w sposób interaktywny.

3
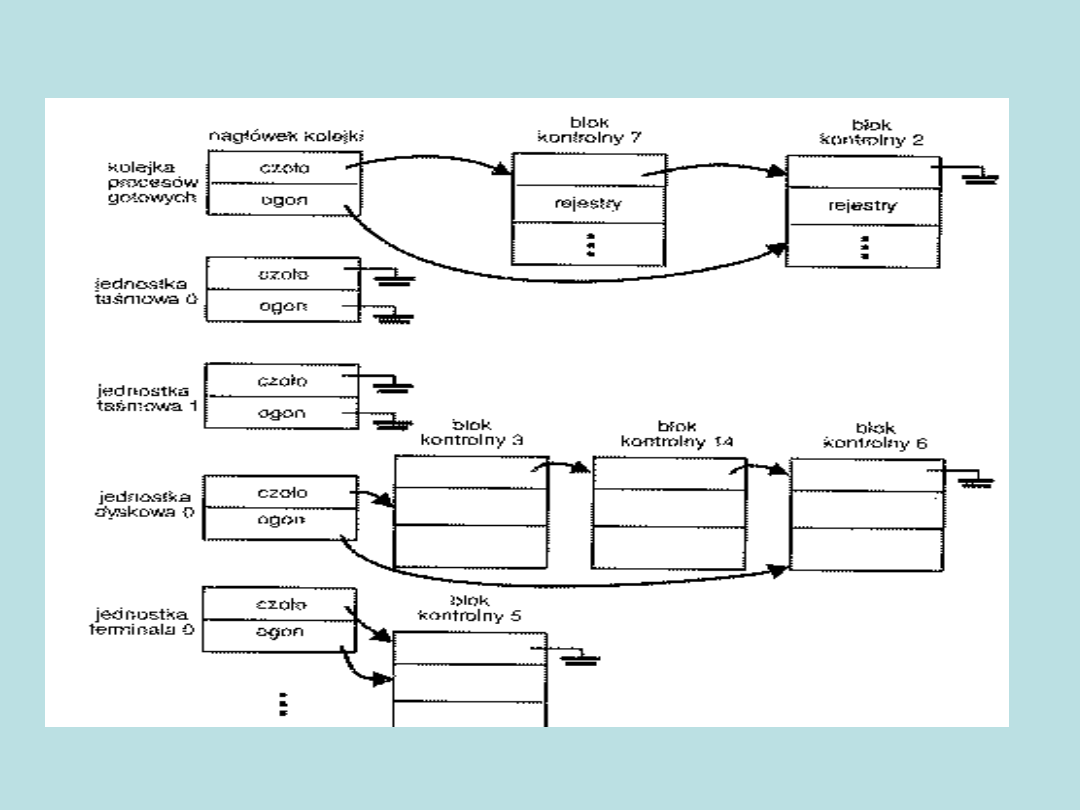
Kolejki planowania (1)
Wchodzące do systemu procesy trafiają do
kolejki zadań - zbioru wszystkich procesów
systemu – i oczekują na przydział PAO.
Kolejka procesów gotowych - zbiór wszystkich
procesów, które oczekują w już w PAO i są gotowe.
Kolejki do urządzeń - zbiór procesów
oczekujących na konkretne urządzenie WE/WY.
4
Kolejki planowania (2)

5
Kolejki planowania (3)
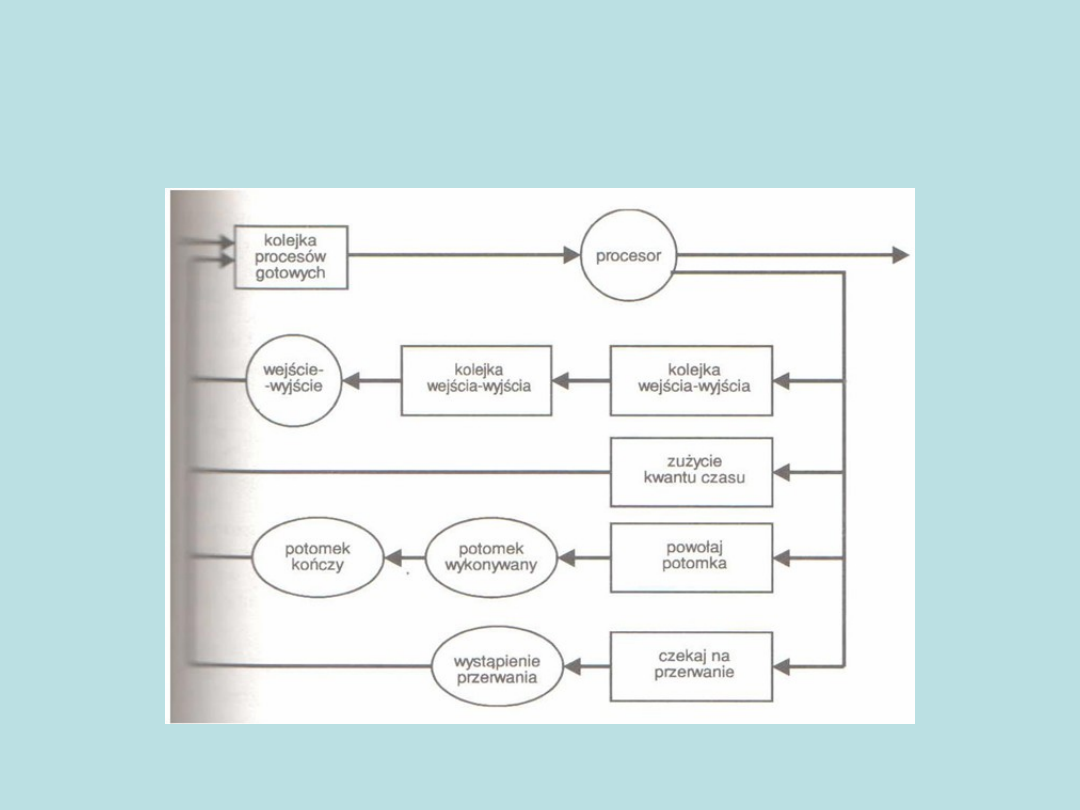
Po przydzieleniu procesowi procesora może
wystąpić jedno z następujących zdarzeń:
proces może zamówić operację WE/WY, wskutek
czego trafia do kolejki procesów oczekujących na
WE/WY,
proces może utworzyć nowy proces i oczekiwać
na jego zakończenie,
w wyniku przerwania proces może zostać
przymusowo usunięty z procesora z powrotem do
kolejki procesów gotowych.

6
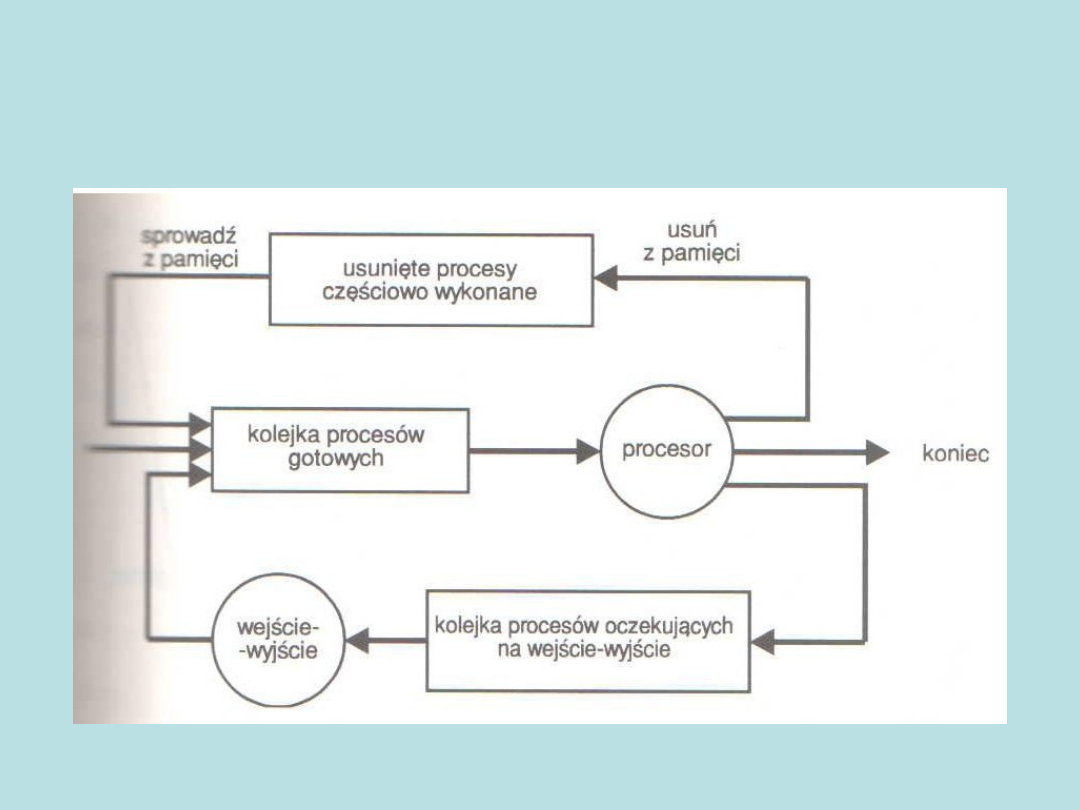
Kolejki planowania (4)
Planowanie procesów ilustruje diagram
kolejek na kolejnym slajdzie.
Każdy prostokąt przedstawia kolejkę,
kółka to zasoby obsługujące kolejki,
strzałki wskazują kierunek przepływu procesów w
systemie.
7
Kolejki planowania (5)
8
Planiści (1)
Wyboru gotowego procesu do
wykonania dokonuje proces
systemowy zwany planistą
(scheduler).
Planowanie jest podstawową funkcją
S.O. Prawie wszystkie zasoby
komputera przydzielane są wg
jakiegoś planu.

9
Planiści (2)
planista krótkoterminowy (planista
przydziału procesora) - wybiera jeden proces,
który ma być wykonywany jako następny i
przydziela mu procesor.
planista długoterminowy (planista zadań) -
wybiera procesy przechowywane w pamięci
masowej (dysk) i ładuje je do pamięci, do kolejki
zadań (kolejki procesów gotowych);
10
Planiści (3)
planista krótkoterminowy musi bardzo często
wybierać nowy proces dla procesora
(milisekundy). Ten planista musi być bardzo
szybki (gdyż może podejmować działanie nawet
raz na 10 milisekund).
planista długoterminowy działa o wiele
rzadziej (sekundy, minuty) i może być wolniejszy;
planista długoterminowy nadzoruje stopień
wieloprogramowości (liczba procesów w pamięci).

11
Planiści (4)
Procesy można podzielić na:
• procesy ograniczone przez WE/WY: większość czasu
spędzają na wykonywaniu operacji WE/WY;
• procesy ograniczone przez dostęp do procesora.
Wniosek:
Planista długoterminowy musi dobrać
mieszankę procesów.
Planista długoterminowy może być w niektórych
systemach nieobecny lub mocno zredukowany. Np. systemy z
podziałem czasu często nie mają żadnego planisty
długoterminowego i umieszczają każdy nowy proces w pamięci
pod opieką planisty krótkoterminowego.

12
Planista pośredni
W niektórych SO z podziałem czasu może
występować pośredni poziom planowania i planista
pośredni (średnioterminowy).
Dokonuje on wymiany procesu poprzez wysyłanie go
z pamięci operacyjnej na zewnątrz i ponowne
wprowadzenie.
Cel: lepszy dobór procesów w pamięci operacyjnej
lub
zwolnienie miejsca w pamięci, gdy żądania pamięci
przekraczają jej bieżący obszar.
13
Uzupełnienie diagramu kolejek
o planowanie
średnioterminowe

14
Przełączanie kontekstu
gdy CPU przełącza się do innego procesu to
system musi przechować stan starego procesu i
załadować przechowywany stan nowego procesu;
nazywa się to przełączaniem kontekstu ;
czas przełączania kontekstu jest obciążeniem dla
systemu, które nie jest związane z żadną użyteczną
pracą ;
czas ten zależy w dużym stopniu od możliwości
sprzętu.

15
Program koordynujący
Program koordynujący (dispatcher) jest
modułem systemu, który faktycznie
przekazuje sterowanie procesora do procesu
wybranego przez krótkoterminowego
planistę. Do obowiązków programu
koordynacyjnego należy:
• przełączanie kontekstu;
• przełączanie do trybu użytkownika;
• wykonanie skoku do odpowiedniego adresu
w programie użytkowym w celu wznowienia
działania programu.
16
Przydział procesora
Decyzje o przydziale procesora mogą zapadać gdy:
• proces przechodzi ze stanu wykonania do czekania
(np. zamówienie na WE/WY),
• proces zakończył działanie,
• proces przeszedł od stanu wykonania do stanu
gotowości (np. wskutek wystąpienia przerwania),
• proces przeszedł ze stanu czekania do stanu
gotowości (np. po zakończeniu operacji WE/WY).
Jeśli planowanie odbywa się tylko w dwu pierwszych
przypadkach to jest to
niewywłaszczeniowy
schemat planowania. W przeciwnym razie mówimy
o
wywłaszczeniowym
schemacie planowania.
17
Algorytmy planowania -
kryteria
Kryteria wyboru algorytmów planowania:
-
wykorzystanie procesora
(w rzeczywistym systemie 40-90%),
-
przepustowość
(liczba procesów kończonych w jednostce czasu) może wynosić od
jednego procesu na godzinę do 10 procesów na 1 sekundę,
-
czas cyklu przetwarzania
(liczony od nadejścia procesu do systemu do zakończenia
procesu = czekanie na wejście do pamięci+ czekanie w kolejce procesów gotowych
do wykonania+ wykonywanie procesu przez procesor + wykonywanie operacji
WE/WY),
-
czas oczekiwania
(procesu w kolejce procesów gotowych). Algorytm planowania nie
ma wpływu na czas w którym proces działa lub wykonuje operacje wejścia-wyjścia.
Oddziałuje tylko na czas spędzany przez proces w kolejce procesów gotowych do
wykonania. Dlatego rozważa się czas oczekiwania każdego procesu.
-
czas odpowiedzi
(reakcji)- ile czasu upływa od przedłożenia zamówienia do
rozpoczęcia pierwszej odpowiedzi.
?

18
Dąży się do maksymalizacji
wykorzystania procesora i
zwiększenia przepustowości oraz
do minimalizacji czasu cyklu
przetwarzania, oczekiwania i
odpowiedzi

19
Przykładowe algorytmy
planowania przydziału
procesora

20
Algorytm -pierwszy nadszedł - pierwszy
obsłużony FCFS (First-Come, First-Served),
realizacja za pomocą kolejki FIFO.
Algorytm jest niewywłaszczający.
Po objęciu kontroli nad procesorem proces
utrzymuje ją do czasu, aż sam zwolni procesor
wskutek zakończenia swego działania albo
wskutek żądania operacji We-Wy.
Metoda charakteryzuje się długim średnim
czasem oczekiwania.
21
Najpierw najkrótsze zadanie (proces) SJF
(Shortest-Job-First). Algorytm ten wiąże z
każdym procesem długość jego najbliższej
z przyszłych faz procesora.
Ponieważ nie można poznać długości następnej fazy procesora
trzeba ją przybliżyć. Przyjmuje się założenie, że długość
następnej fazy procesora będzie podobna do długości faz
poprzednich.
Algorytm SJF może być wywłaszczający lub
niewywłaszczający.
22
Planowanie priorytetowe - każdy proces otrzymuje
priorytet (np. z przedziału 0-7 czy 0-4095).
Procesor przydziela się temu procesowi, którego
priorytet jest najwyższy.
Problemem jest nieskończone blokowanie
Rozwiązaniem może być „postarzanie” procesów
czyli podwyższanie priorytetów procesów długo
oczekujących w systemie np. co kilkanaście minut.
Planowanie priorytetowe może być wywłaszczające
lub niewywłaszczające.
W 1973 r. W MIT, w wycofanym z eksploatacji IBM 7094 wykryto
nisko priorytetowy proces przedłożony do wykonania w 1967 i nie
wykonany.
23
W planowaniu rotacyjnym (round-robin)- ustala
się kwant czasu (rzędu 10-100 milisekund).
Planista przegląda kolejkę procesów gotowych
do wykonania i każdemu procesowi przydziela
odcinek czasu nie dłuższy od 1 kwantu czasu.
Kolejka procesów gotowych do wykonania traktowana
jest jak kolejka cykliczna.
Algorytm jest wywłaszczający
.
Algorytm zaprojektowano specjalnie dla
systemów z podziałem czasu. Średni czas
oczekiwania często bywa dość długi.

24
Różnorodność algorytmów planowania powoduje,
iż potrzebne są metody pomagające wybierać
właściwe algorytmy.
W metodach analitycznych stosuje się analizę
matematyczną do określania zachowania
algorytmu.
Metody symulacyjne pozwalają określić
zachowanie algorytmu dzięki naśladowaniu jego
działania na reprezentatywnych próbkach
procesów oraz gromadzeniu charakteryzujących
go wyników obliczeń statystycznych.
25
Planowanie w systemach
wieloprocesorowych
Systemy heterogeniczne
• Każdy z procesorów ma własną kolejkę procesów
gotowych i własny algorytm planowania.
Systemy homogeniczne
• Używa się wspólnej kolejki procesów gotowych.
Procesy otrzymują dowolny z dostępnych
procesorów.
• Planowanie może być wtedy zorganizowane na
dwa sposoby:
• - każdy procesor sam planuje swoje działanie,
• - jeden procesor spełnia rolę planisty pozostałych
procesorów (wieloprzetwarzanie asymetryczne).
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
Wyszukiwarka
Podobne podstrony:
SO3 zarządzanie procesami powtórzenie
5 Systemy Operacyjne 23 11 2010 Zarządzanie procesami
Zarządzanie procesowe i systemowe
14 Klepacki Martyniuk Zarzadzanie procesami
ZARZĄDZANIE PROCESAMI
Zarządzanie procesami 2
plan pracy zarządzania procesami (1)
zarzadzanie procesami wyklady
3 zagadnienia do kolokwium zarzadzanie procesami 14 2015
Projekt na Zarządzanie Procesami
Zarzadzanie procesami NN, Zarządzanie Inwestycjami i Nieruchomościami UWM, Zarządzanie procesami
Zarzadzanie procesami Wyklady 2009-2010
Sciaga zarzadanie procesami gospodarczymi, Zarządzanie i marketing
Zarządzanie procesami, zp w5, WYŻSZA SZKOŁA OFICERSKA
Zarządzanie procesami, zarzadzanie procesami -sylabus wyklad, Wydział Ekonomiczno - Menadżerski
ZARZĄDZANIE PROCESOWE I SYSTEMOWE
zarzadzanie procesami sciaga
więcej podobnych podstron