
1
GEODEZYJNA OBSŁUGA
GEODEZYJNA OBSŁUGA
REALIZACJI I KONTROLI
REALIZACJI I KONTROLI
BUDOWY DŻWIGNIC
BUDOWY DŻWIGNIC
Kazimierz Ćmielewski
Instytut Geodezji i Geoinformatyki
Uniwersytet Przyrodniczy we Wrocławiu

2
Na terenie każdego portu, stoczni, hali
produkcyjnej
czy
zakładu
przemysłowego, znajdują się urządzenia
dźwigowe, wśród których przeważającą
grupę stanowią suwnice. Są one
wykorzystywane jako środki transportu
bliskiego i służą do załadunku i
rozładunku materiałów, towarów, itp.,
oraz ich przenoszenia z miejsca na
miejsce.
Wprowadzenie
3
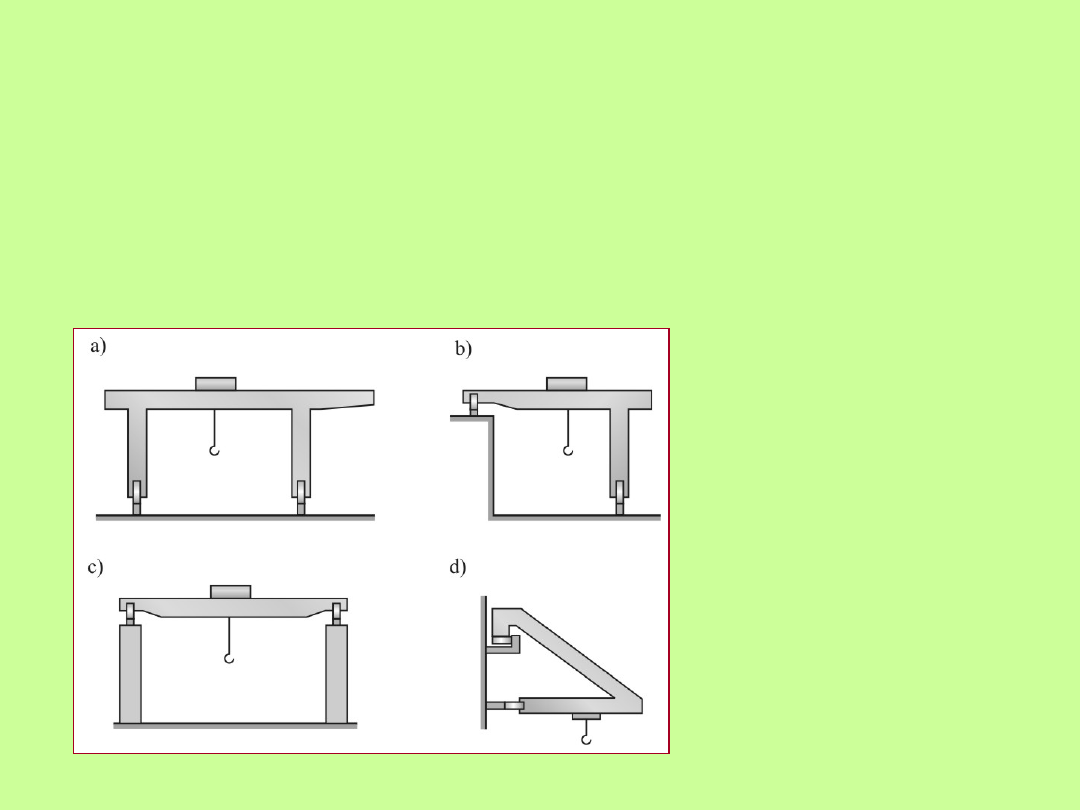
a - suwnica bramowa
(portalowa)
b - suwnica półbramowa
(półportalowa)
pracująca przy ścianie
c - suwnica pomostowa
d - suwnica wspornikowa
Rodzaje suwnic
Suwnica jest to urządzenie transportowe złożone z toru
podsuwnicowego, po którym porusza się ustrój nośny mostu
(pomostu) oraz poruszającego się po nim na bieżni wózka z
wciągarką. Torem podsuwnicowym najczęściej jest zespół dwóch
szyn zajmujących położenie w przestrzeni określone kierunkiem,
pochyleniem i rozstawem.
4
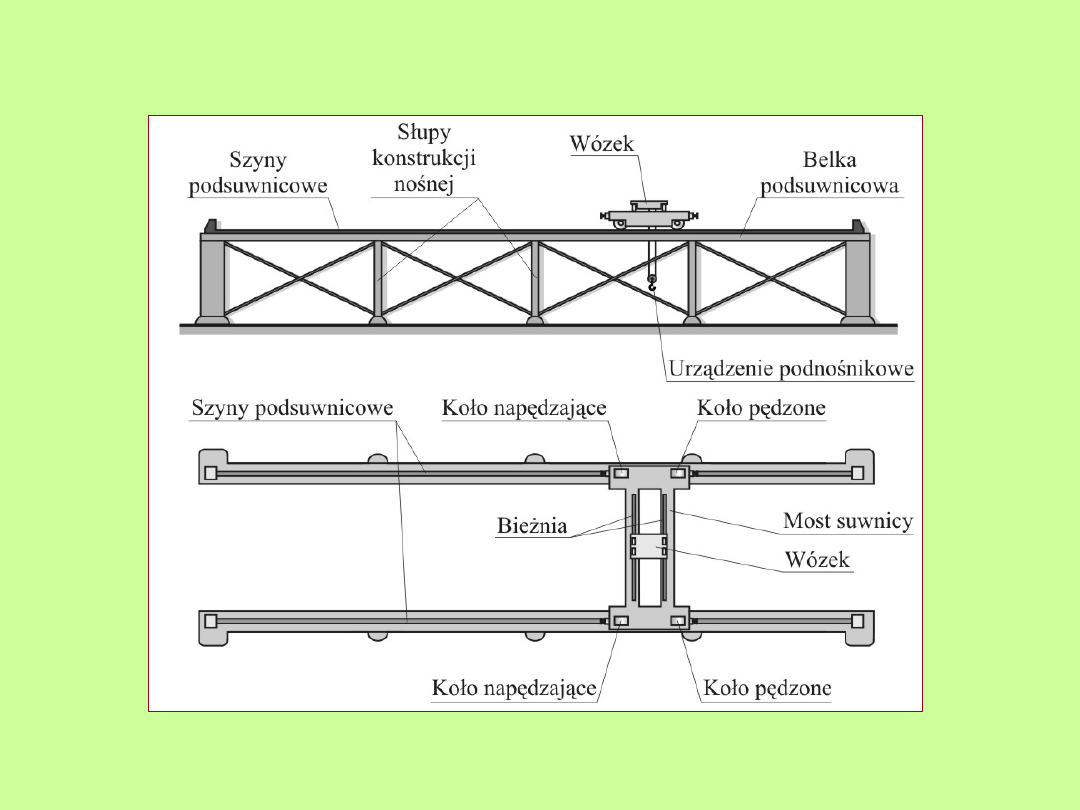
Budowa suwnicy
Suwnica pomostowa

5
Wskutek osiadania podłoża gruntowego a tym samym
konstrukcji
nośnej
toru
podsuwnicowego
oraz
oddziaływania różnych czynników geologicznych, w
trakcie
wieloletniej
współpracy
zespołu:
tory
podsuwnicowe-suwnica, występują:
Powyższe zjawiska powodują możliwość wystąpienia
awarii i naruszenie obowiązujących zasad bhp oraz
zmianę projektowego ułożenia geometrycznego osi szyn
toru w okresie jego wieloletniej eksploatacji.
• stopniowe rozregulowania się
torów i
suwnic
• pogorszenie się pracy suwnicy
• nieuzasadniony pobór energii
elektrycznej
• nadmierne zużywanie się
mechanizmów suwnic
6
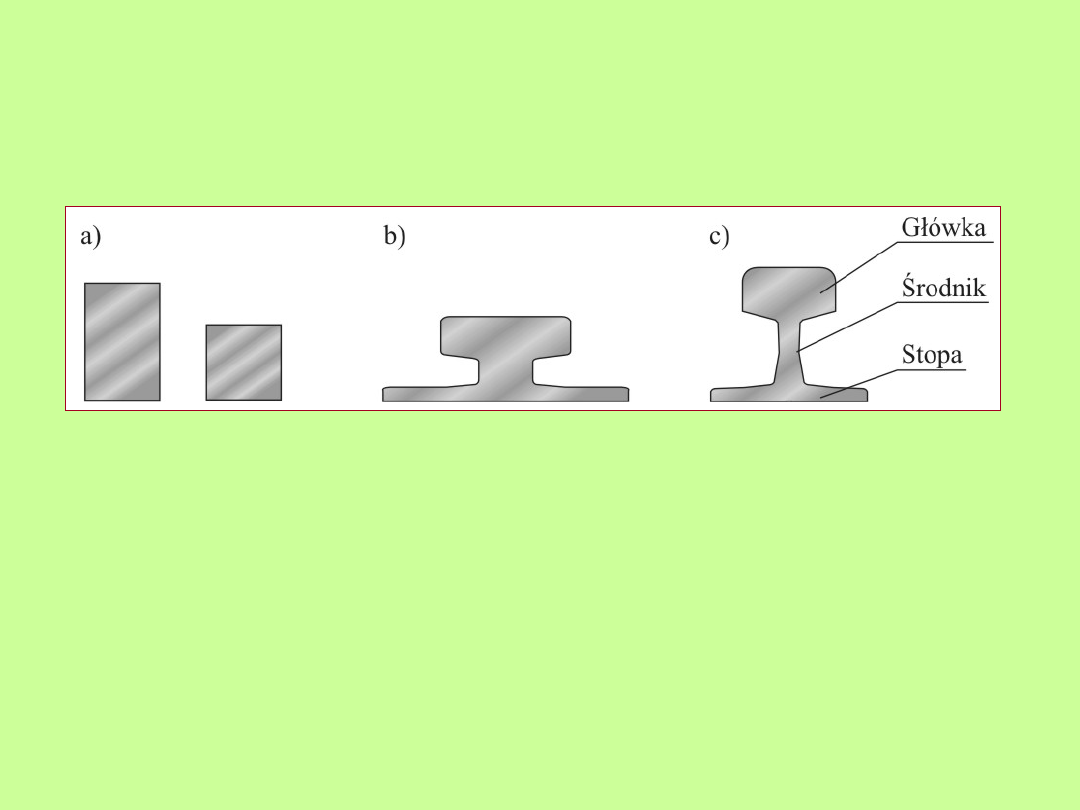
Przekrój poprzeczny odmian szyn stosowanych w torach
suwnicowych
a) szyny kwadratowe lub prostokątne stosowane przy dużych nośnościach
suwnic (powyżej 100 t)
b) typowe szyny dźwigowe o szerokości główki od 65 do 100 mm (PN-62/H-
93410) stosowane przy średnich nośnościach suwnic (do 100 t)
c) szyny normalnotorowe (kolejowe) o szerokości główki 62 lub 72 mm
stosowane dla suwnic o nośnościach małych (od kilku do kilkudziesięciu
ton)
W zależności od długości torowiska występuje następujący podział: tory
krótkie (do 100 m), średnie (od 100 do 300 m) i długie (powyżej 300 m).
W zależności od nośności suwnicy stosuje się następujące odmiany
przedstawione na rysunku:
Szyny suwnic

7
Pomiary inwentaryzacyjne suwnic obejmują:
• pomiar elementów geometrycznych toru jezdnego
mostu i wózka suwnicy
• pomiar kształtu mostu suwnicowego
(podstawowych wymiarów)
• pomiar położenia mostu w lokalnym układzie całej
suwnicy
• pomiar średnic i położenia kół suwnicy
• pomiary dynamiczne zmian położenia konstrukcji
suwnicy podczas ruchu
• pomiary ugięć konstrukcji związanych z
obciążeniem suwnicy.
8
Główne wymagania geometryczne dla torów
podsuwnicowych
Prawidłowa praca suwnicy związana jest ze
spełnieniem następujących warunków
geometrycznych:
• szyny toru stanowią elementy prostoliniowe,
• toki szyn są oddalone od siebie w płaszczyźnie
poziomej i pionowej o wielkości projektowe,
• szyny i belki ułożone są w odpowiednich
odległościach od elementów konstrukcji nośnej
hali lub estakady oraz innych urządzeń w
szczególności elektrycznych,
• część toczna szyny ma określony wymiar i ułożenie
przestrzenne (nachylenie)
Dla suwnic pomostowych obowiązującą jest norma PN-
91/M-45457, a dla suwnic półbramowych i bramowych
PN-M-45495.
9
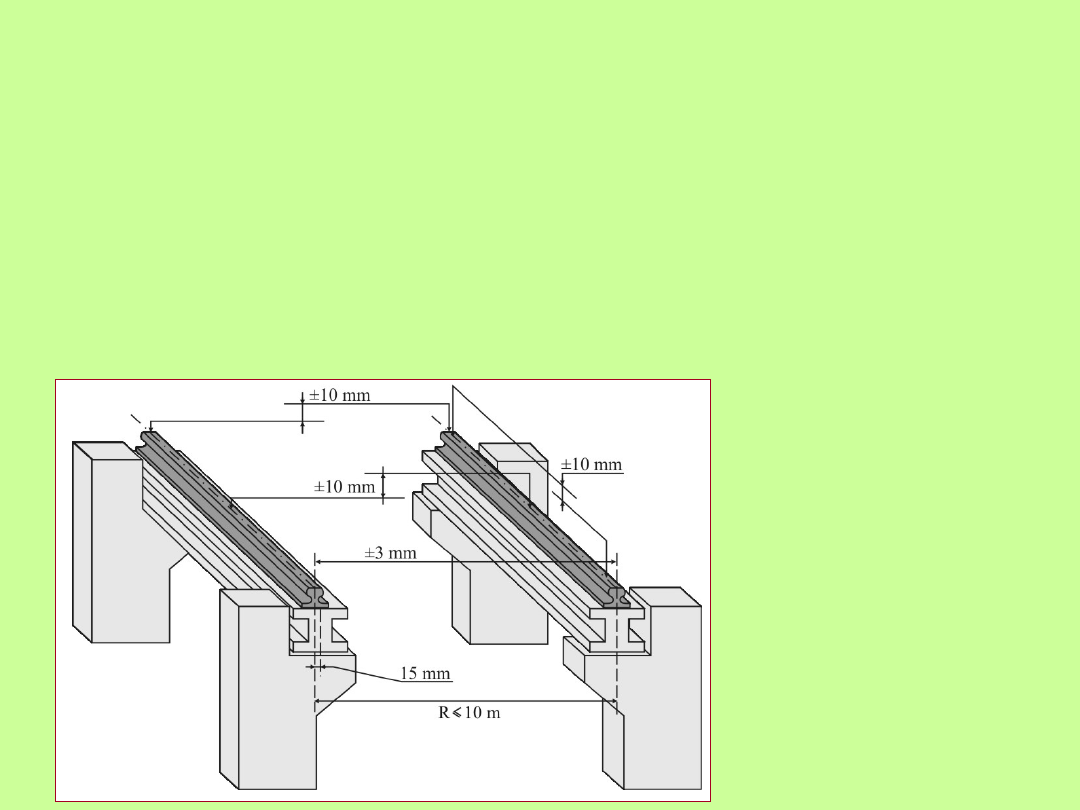
Podstawowe parametry torów suwnicowych
• rozstaw szyn R (rozpiętość): dla torów o rozstawie R≤10 m
dopuszczalna różnica (odchyłka) między rzeczywistym a
teoretycznym rozstawem nie może przekraczać wartości =±3 mm,
a dla torów o rozstawie R≥10 m, wartości =±(3+1/4(R-10)) a
zarazem być mniejsza od wartości ≤15 mm
• różnica poziomów główek szyn (przechyłka boczna) nie powinna
przekraczać wartości odchyłki =±10 mm
• różnica wysokości przekrojów główek szyn w przekroju podłużnym
(pochylenie wzdłużne) nie powinna przekraczać wartości odchyłki
=±10 mm
Dopuszczalne
wartości odchyłek
wzajemnego ułożenia
osi szyn toru
podsuwnicowego
10
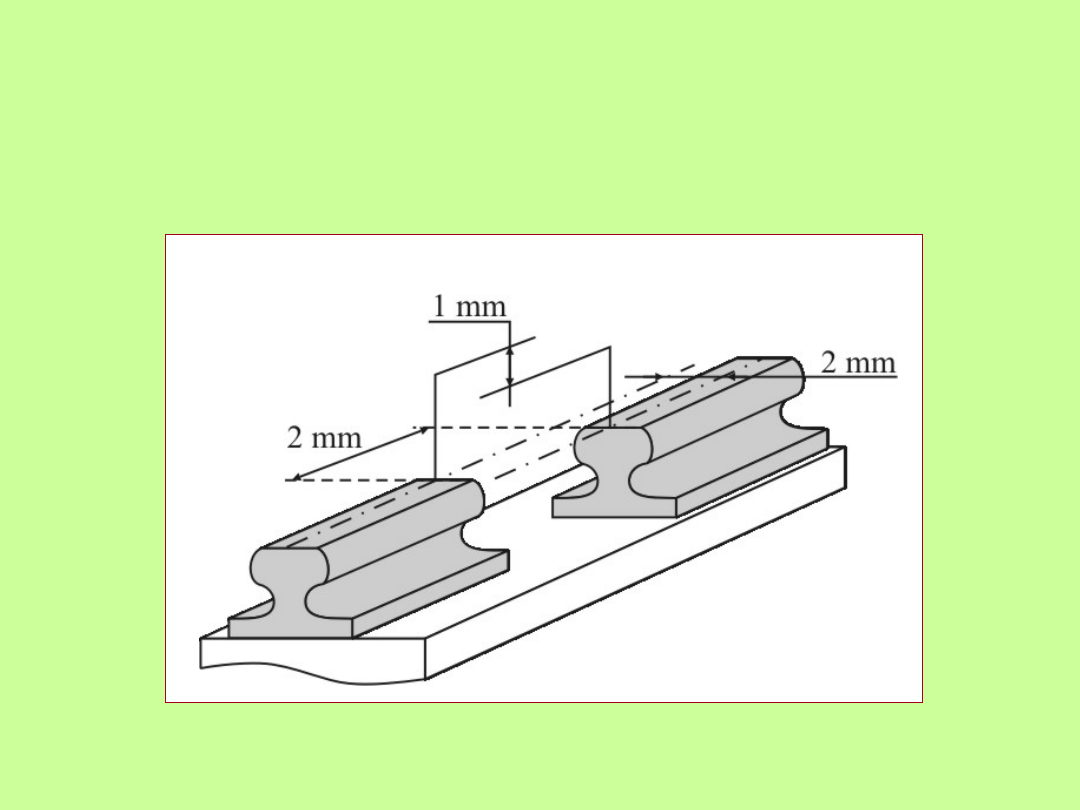
Dopuszczalne odchyłki przesunięcia główek szyn
w styku
• wzajemne przesunięcie w styku sąsiednich szyn nie powinno
przekraczać wartości odchyłki w poziomie D≤2 mm, w pionie D≤1
mm, natomiast końce łączonych odcinków szyn nie powinny
wykazywać szczeliny większej od 2 mm.
Podstawowe parametry torów suwnicowych
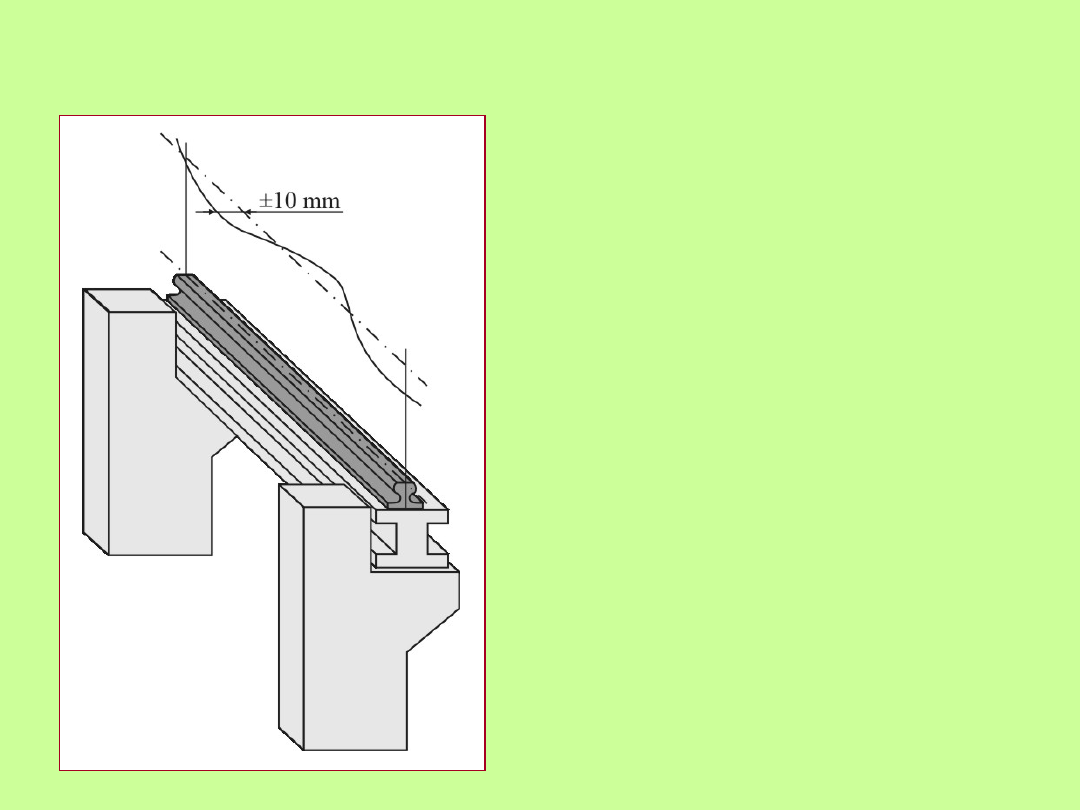
11
Dopuszczalna odchyłka osi
szyny od prostoliniowości
• odchylenie osi szyn od prostej w
płaszczyźnie poziomej nie powinno
przekraczać wartości odchyłki
D=±10 mm
Podstawowe parametry torów suwnicowych
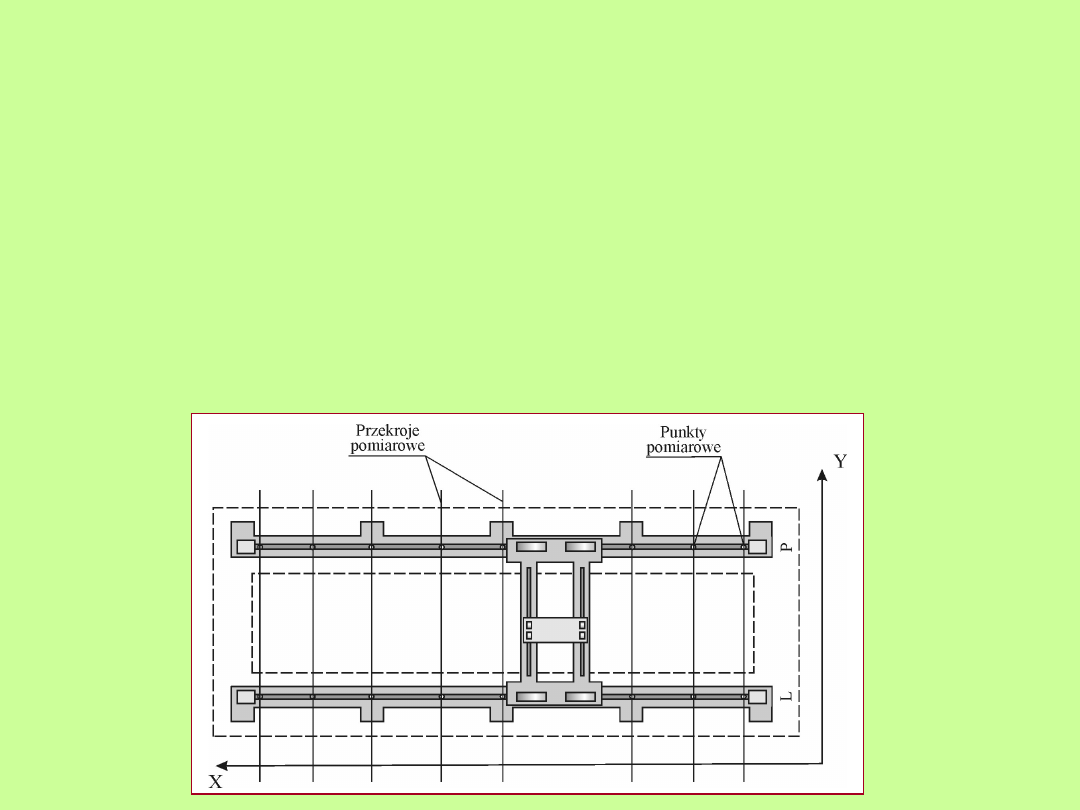
12
Rozmieszczenie punktów pomiarowych na
torach podsuwnicowych
Podczas oznaczania punktów pomiarowych na torze suwnicy
należy wykonać następujące czynności:
• most suwnicy ustawiony w skrajne położenie toku szyn,
• ustawienie teodolitu nad jedną z szyn w drugim końcu
toku,
• centrowanie instrumentu na wyznaczony środek główki
szyny,
• nacelowanie na środek główki szyny w pobliżu mostu
suwnicy,
• odłożenie kąta prostego i zaznaczenie punktu na drugiej
szynie toru.
W ten sposób wyznaczony zostaje pierwszy przekrój
pomiarowy od którego wyznacza się kolejne w rozmierzonych
miejscach jak na rysunku.
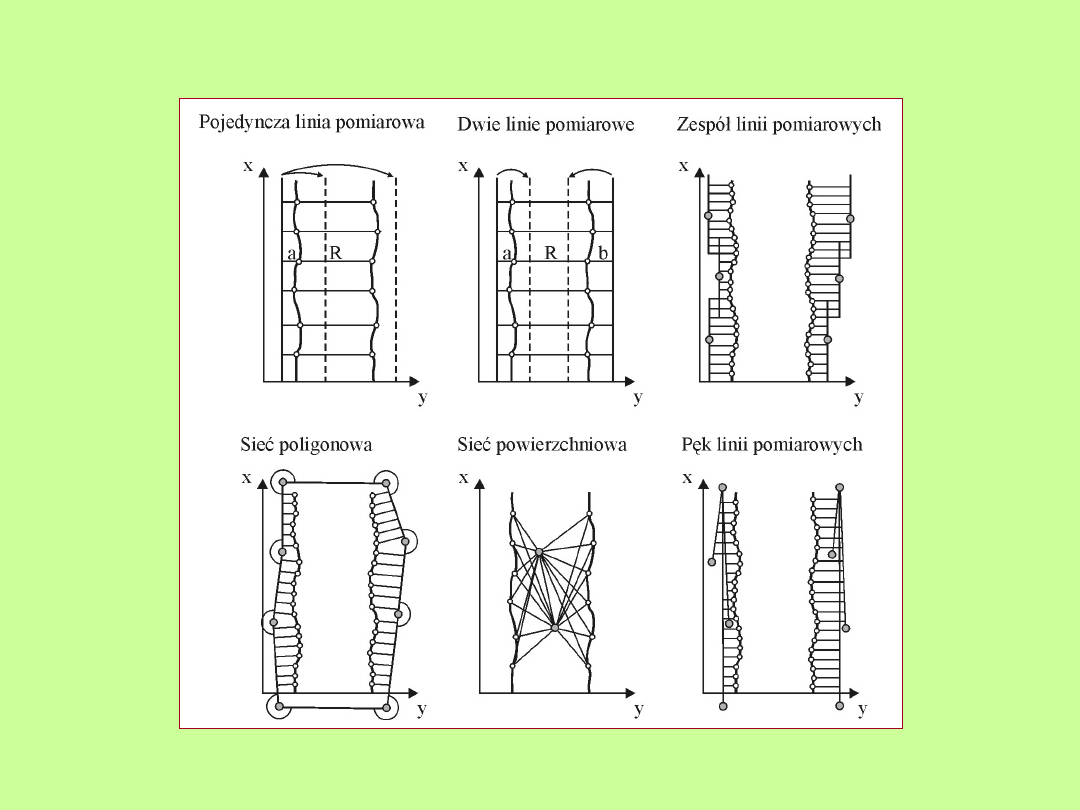
13
Poziome osnowy pomiarowe
Warianty poziomych osnów pomiarowych
14
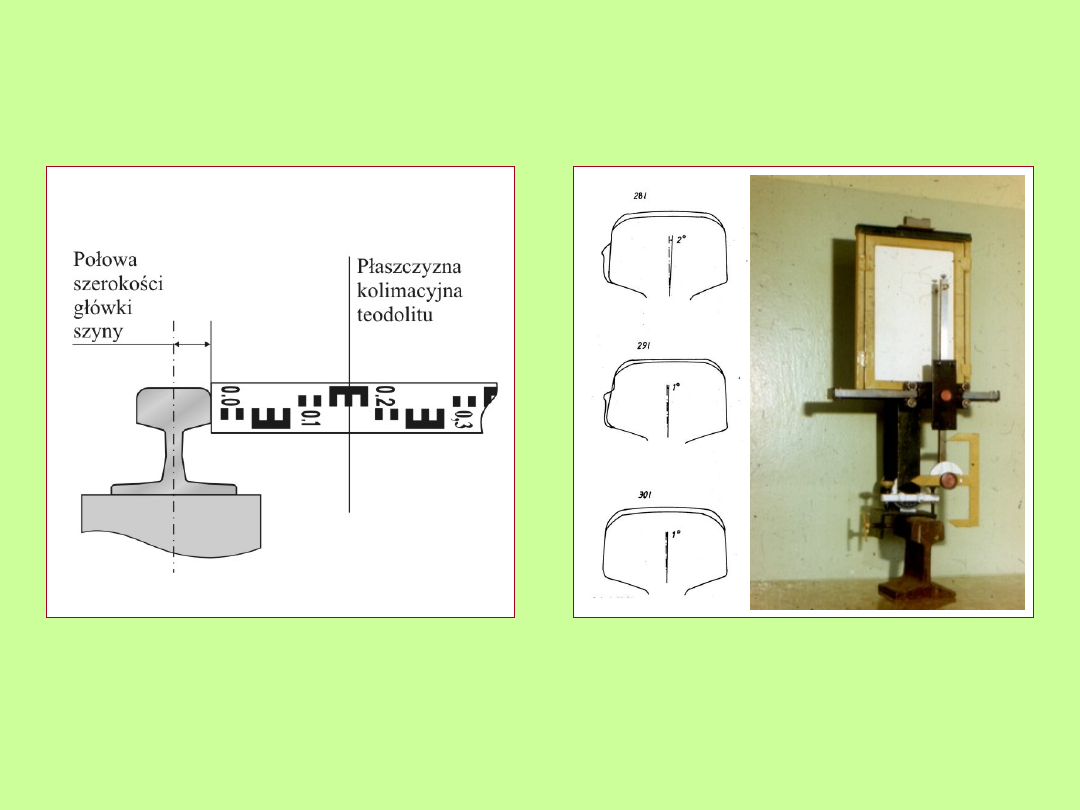
Pomiary prostoliniowości szyn
Sposób przyłożenia
łaty do szyny
Deformacje główek
szyn (profilograf)
15
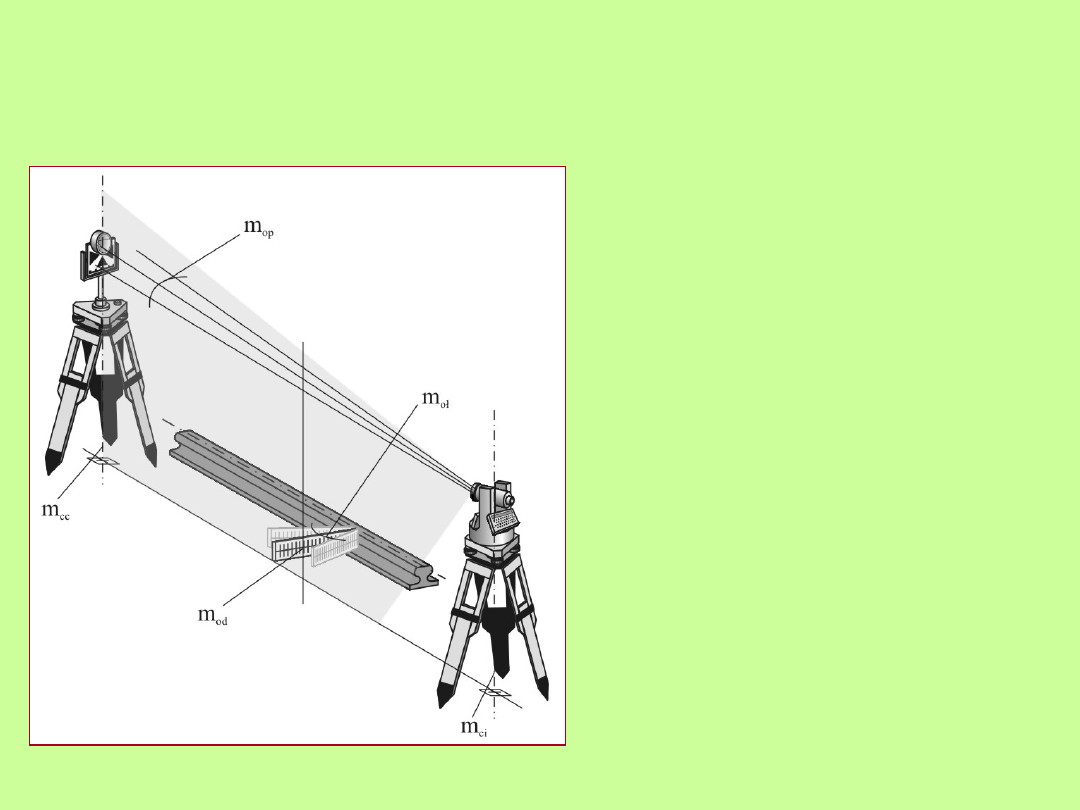
Błędy występujące przy pomiarach
inwentaryzacyjnych metodą aliniometryczną (tj.
metodą stałej prostej)
Rodzaje błędów
m
ci
- błąd centrowania
instrumentu oraz tarczy (celu)
na punktach osnowy,
m
op
- błąd zorientowania
pionowej płaszczyzny
odniesienia na tarczę (cel),
m
od
- błąd odczytu na podziałce
łaty,
m
oł
- błąd pomiaru odchylenia
od prostej na wskutek
nieprostopadłego ustawienia
podziału łaty do prostej
odniesienia,
m
xp
- błąd położenia punktu
kontrolowanego na szynie
(wyznaczenie punktu, miara
bieżąca na torze).
16
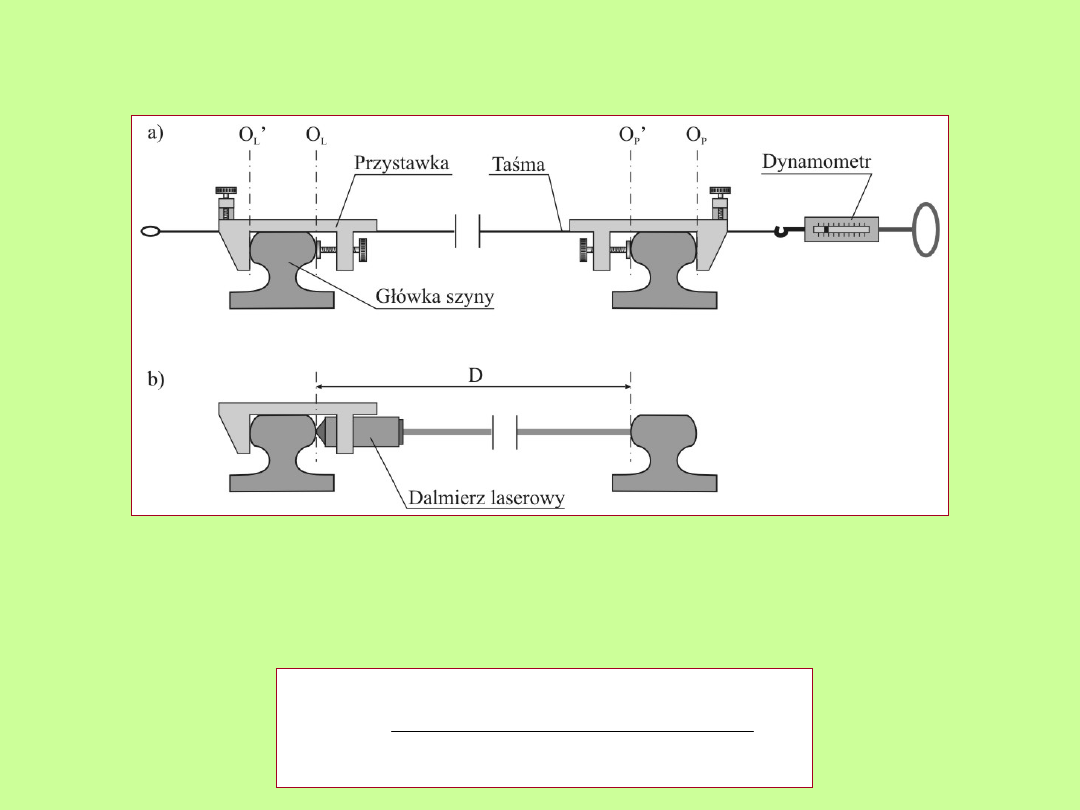
Pomiary rozstawu torów jednopoziomowych
Pomiar rozstawu szyn: a) bezpośredni - przy pomocy
przystawek oraz taśmy i dynamometru, b) pośredni -
dalmierzem laserowym Disto (Leica)
Bezpośredni rozstaw pomierzony na obiekcie taśmą oblicza się
z następującego wzoru:
2
)
'
'
(
)
(
'
L
P
L
P
O
O
O
O
R
17
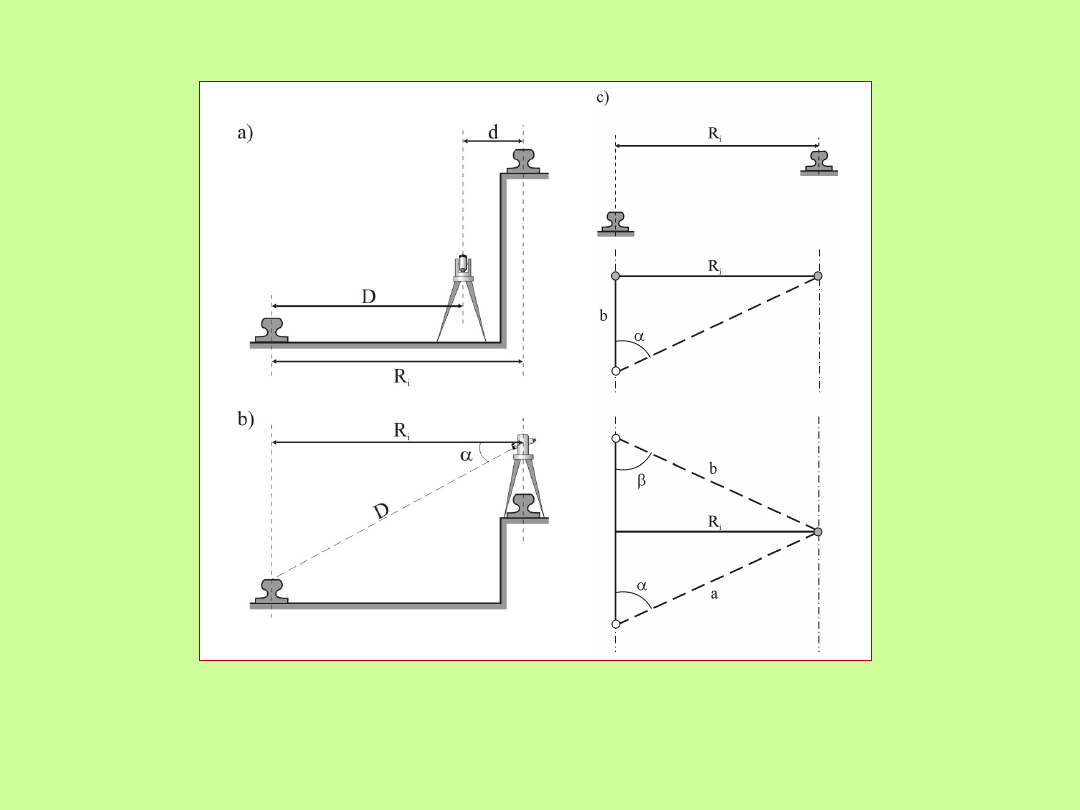
Pomiary rozstawu torów dwupoziomowych
Sposób pośredniego pomiaru rozstawu torów dwupoziomowych z
wykorzystaniem:
a) metody rzutowania teodolitem, b) metody trygonometrycznej,
c) metoda wcięcia w przód
18
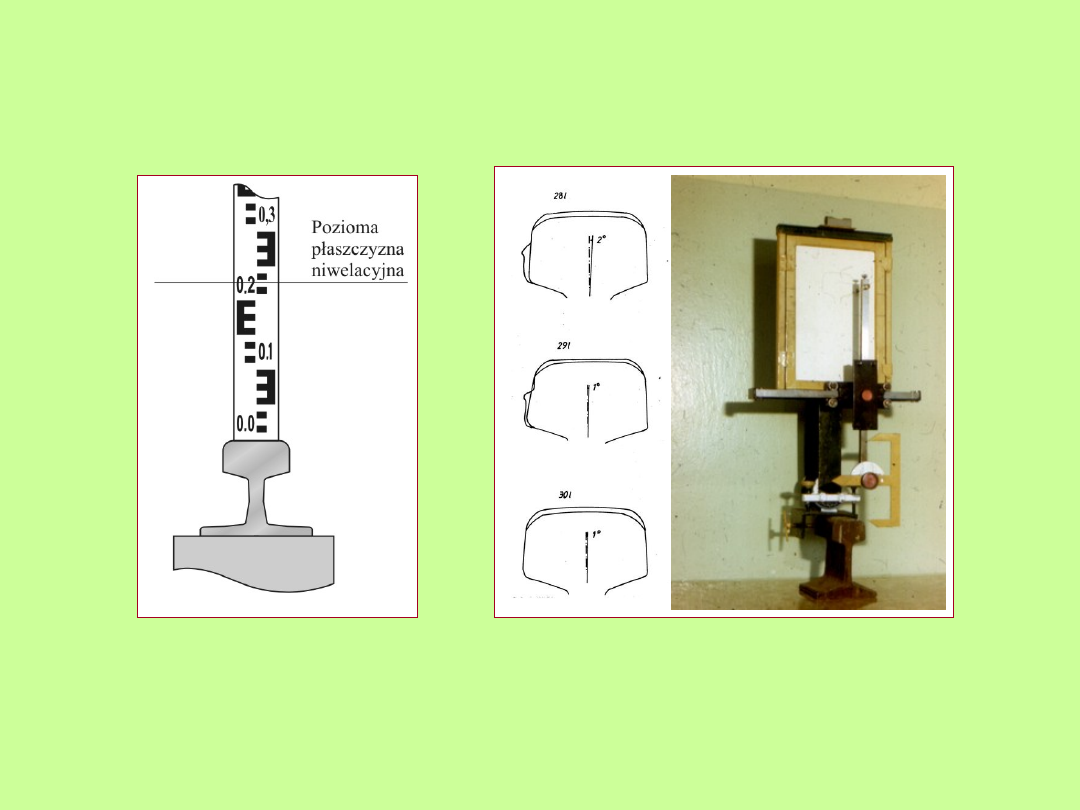
Pomiary niwelacyjne położenia wysokościowego główki szyn
Pomiary bezpośrednie metodą niwelacji geometrycznej punktów rozproszonych
Ustawienie łaty
niwelacyjnej na główce
szyny
Deformacje główek
szyn (profilograf)







26
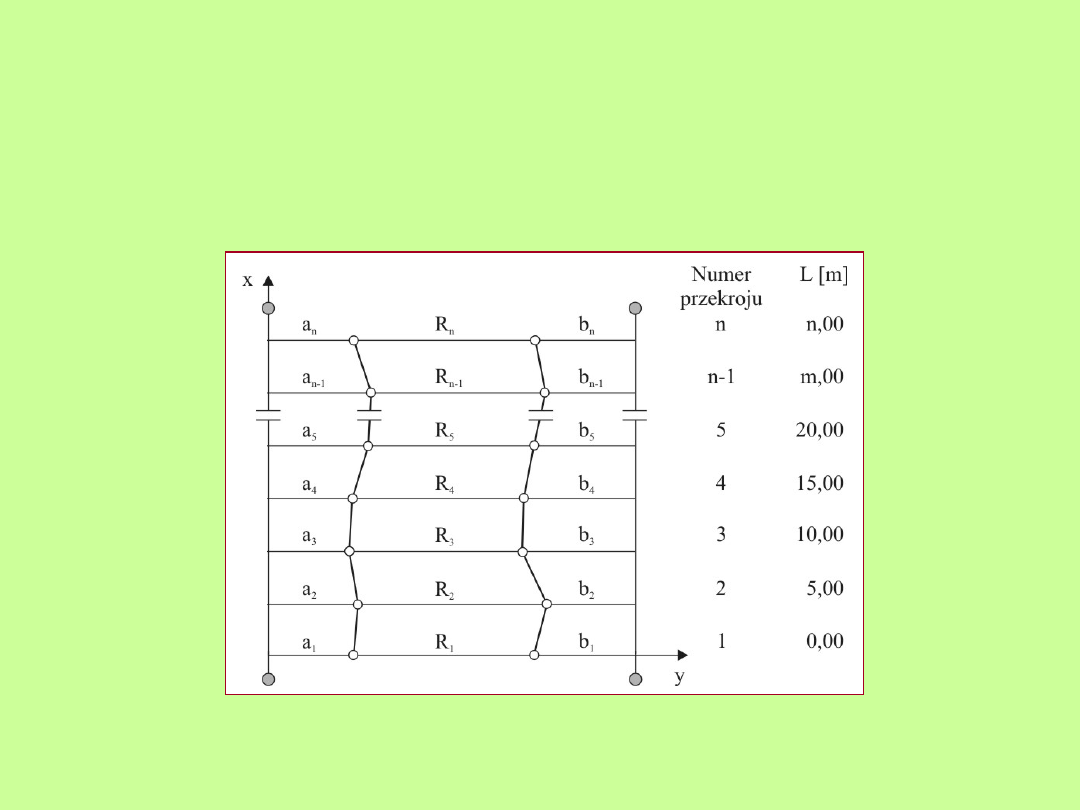
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
Przyjęcie lokalnego układu współrzędnych przy założeniu, że oś X
pokrywa się z pierwszą prostą odniesienia, a oś Y z pierwszym
przekrojem pomiarowym
Schemat konstrukcji osnowy pomiarowej dla prostych
odniesienia z lokalizowanych na zewnątrz szyn
27
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
Wielkości a i b oraz R obarczone są niedokładnościami wskutek błędów
pomiarowych występujących w procesie pomiarowym (praca na
wysokości, ograniczona pomiarowa przestrzeń operacyjna, drgania belek
podsuwnicowych, itp.), użytych instrumentów (teodolit, tachymetr) i
przyrządów (taśmy, łaty, itp.) oraz obserwatora (niedoświetlenie, hałas,
itp.).
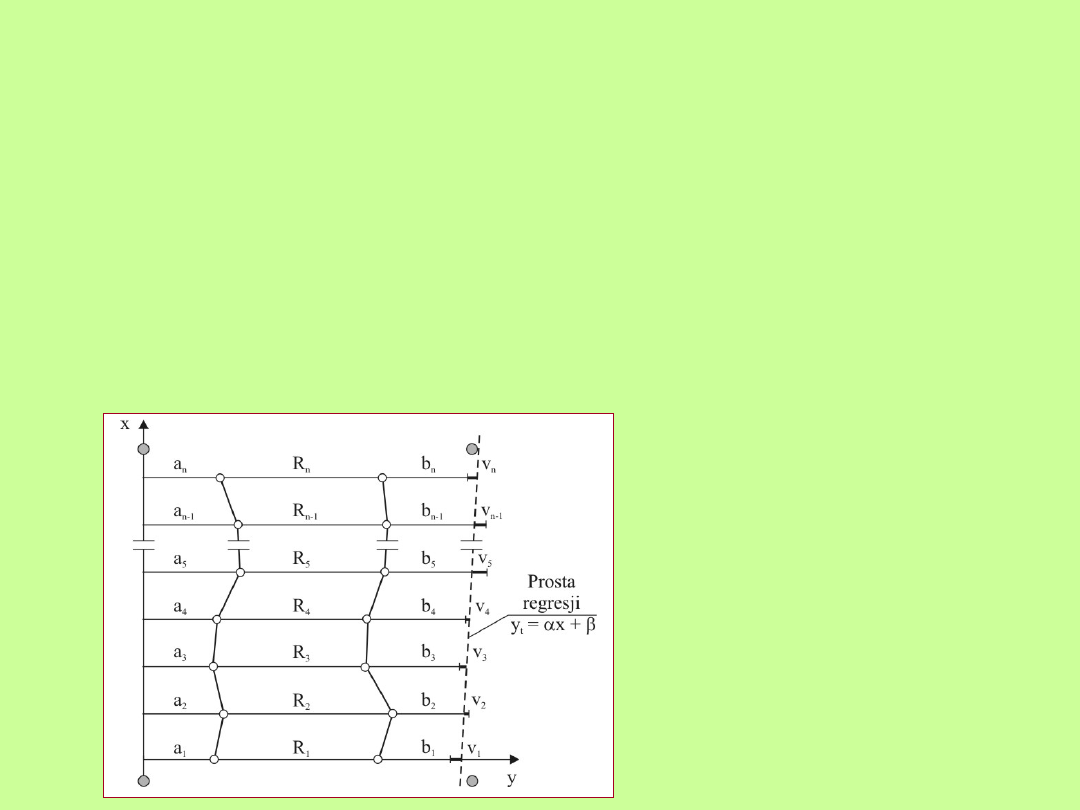
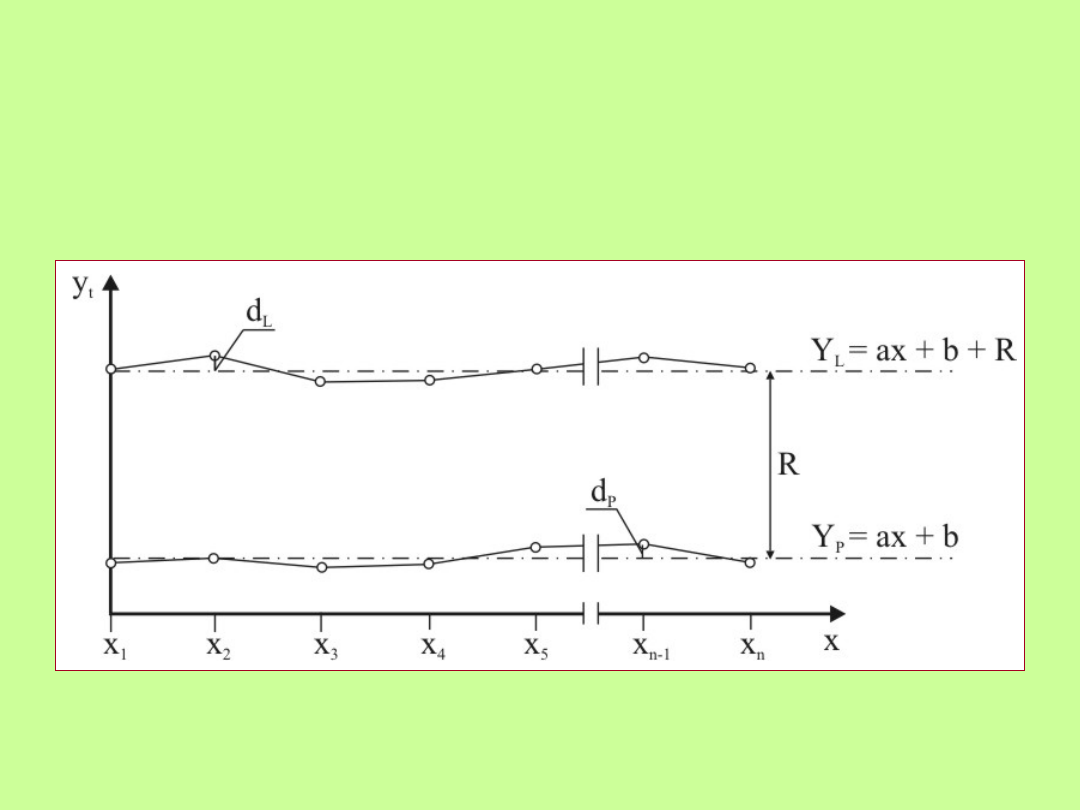
Wyrównanie spostrzeżeń poziomych deformacji toru przeprowadza się
poprzez wpasowanie prostej wyrównującej y
t
w wyniki pomiarów w
oparciu o zasadę metody najmniejszych kwadratów –
min
2
v
Szkic do wyrównania
spostrzeżeń poziomych
deformacji toru
28
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
x
y
t
p
t
y
y
v
n
n
n
p
b
R
a
y
n
n
n
b
R
a
x
v
Etapy wyrównania obserwacji
- zapisanie równania prostej wyrównującej według wzoru 1:
gdzie:
– kierunek prostej wyrównującej,
– punkt przecięcia prostej z osią Y,
- zestawienie równań poprawek według wzoru 2:
gdzie
:
Stąd równanie poprawek można zapisać według wzoru 4:
Liczba równań poprawek jest równa liczbie pomierzonych
przekrojów.
(2)
(3)
(4)
(1)
29
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
Warianty równań poprawek w zależności od
usytuowania prostych odniesienia
30
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
min
2
v
0
0
2
p
p
y
n
x
xy
x
x
Po nałożeniu na układ równań poprawek (wzór 4) warunku
otrzymuje się układ równań normalnych (5):
Z przedstawionego układu równań (wzór 6) wyznacza się niewiadome a
i b (np. metodą wyznaczników), a następnie wartości poszczególnych
poprawek v. Zakładając że pomiary prostoliniowości i rozstawu osi szyn
toru są jednakowodokładne, można wyrównać wartości pomierzone a,
b, R, według wzoru 6:
v
a
a
3
1
'
v
b
b
3
1
'
v
R
R
3
1
'
(6)
(4)
(5)
31
2
2
0
n
v
m
mm
m
5
,
2
0
2
3
3
2
0
n
v
m
m
m
m
R
b
a
Ocenę dokładności pomiarów polowych dla pojedynczego przekroju
pomiarowego korzystając z wzoru 7:
Przyjmuje się że wartość średniego błędu pomiaru pojedynczego
przekroju pomiarowego m
0
dla prawidłowo wykonanych obserwacji
przyjmuje wartość
Średni błąd pojedynczego pomiaru poszczególnej wielkości a, b lub R
można wyznaczyć z wzoru:
(8)
Określenie dokładności pomiarów polowych
w płaszczyźnie poziomej
(7)
32
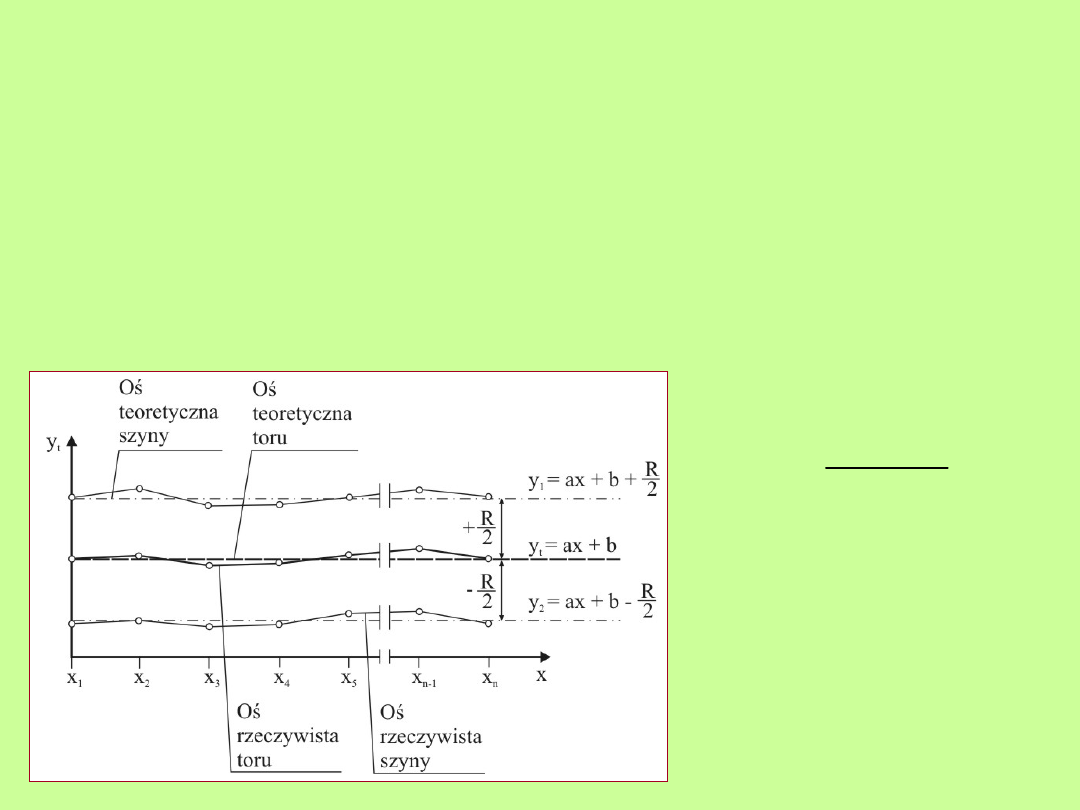
Wyznaczenie położenia osi szyn suwnicowych
Zasadniczą czynnością przy opracowaniu projektu jest
rektyfikacji osi szyn w płaszczyźnie poziomej najkorzystniejsze
wpasowanie w układ osi rzeczywistych, teoretycznego układu
osi. Od tej czynności, w głównej mierze zależeć będzie ilość i
wielkość przesunięcia osi szyn, a zatem zakres i czas
rektyfikacji w terenie. W zależności od stosowanego sposobu,
wpasowanie to opiera się na zasadzie:
• Metodą graficznego opracowania
– doprowadzenia do
wizualnie uchwytnych najmniejszych rozbieżności między
osiami rzeczywistymi, a wpasowanym graficznie układem
teoretycznych osi.
• Metodą analityczną
– doprowadzenie do położenia osi
szyn tak, aby był zachowany warunek minimum sumy
kwadratów odchyleń osi rzeczywistej toru (a nie szyn) od
jego osi teoretycznej.
Często stosowanym sposobem był sposób graficzny. Aktualnie
stosuje się na ogół sposób analityczny.
33
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
Stosowanie tego sposobu jest możliwe gdy:
• punkty pomiaru osi rzeczywistych na obu szynach są rozmieszczone
w jednakowych przekrojach poprzecznych,
• dokładność wyznaczenia położenia punktów jest jednakowa,
• współrzędne punktów obu osi rzeczywistych są obliczone we
wspólnym układzie, tak zorientowanym, że oś Y jest równoległa do
linii przekrojów poprzecznych, a oś X przechodzi przez dwa skrajne
punkty osi jednej z szyn lub jest przesunięta równolegle do niej
Ilustracja wyznaczenia
układu teoretycznego osi
szyn
L
P
t
p
x
x
x
y
y
y
2
2
1
(9)
34
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
b
ax
Y
t
min
2
2
t
t
y
Y
d
p
p
t
y
b
ax
y
Y
d
Proces obliczeń w tej metodzie polega na wyznaczeniu równania jednej
prostej wyrównującej (regresji) postaci:
dla punktów osi rzeczywistej toru ze spełnieniem warunku minimum dla
sumy kwadratów odchyleń – d osi rzeczywistej toru od prostej
wyrównującej, czyli:
Prostą wyrównującą określa się jako oś teoretyczną toru.
W celu wyznaczenia niewiadomych parametrów a i b w równaniu, układa
się tzw. równanie odchyłek o postaci ogólnej:
których liczba będzie równa ilości przekrojów poprzecznych.
(10)
(11)
(12)
35
0
0
2
p
p
y
nb
a
x
xy
b
x
a
x
2
R
b
ax
Y
t
2
R
b
ax
Y
t
Rozwiązanie układu (13) pozwala wyznaczyć wartości liczbowe
niewiadomych równania (10). Na podstawie otrzymanego równania osi
toru (10) i znanej z dokumentacji rozpiętości teoretycznej osi – R, określa
się równania teoretycznych obydwu osi szyn – lewej i prawej:
Szyna 2: (15)
Z równań (12) tworzy się układ równań normalnych o postaci:
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
(13)
Szyna 1: (14)
36
Układ osi średnich wpasowanych w osie rzeczywiste przy zadanej rozpiętości
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
Drugi sposób wyznaczenia średnich osi, stosujemy gdy znany jest
rozstaw szyn R dla suwnicy (rozstaw nominalny - projektowy).
37
Wówczas w osie rzeczywiste szyny lewej (x
L
, y
L
) i prawej (x
P
, y
P
)
wpasowuje się układ dwóch prostych równoległych oddalonych o
wartość rozstawu nominalnego R. Równania prostych mają postać:
(16)
Wyznaczenie osi średnich odbywa się przy zachowaniu warunku
najmniejszych kwadratów o postaci:
(17)
R
b
ax
Y
b
ax
Y
L
L
P
P
min
2
2
2
2
L
p
L
L
P
P
d
d
y
Y
y
Y
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
38
W celu wyznaczenia niewiadomych parametrów a i b w równaniach
wzór 16 układa się równania odchyłek w postaci ogólnej dla szyny
prawej i lewej:
(18)
Równań odchyłek będzie tyle ile pomierzonych przekrojów
poprzecznych.
nL
nL
nL
L
L
L
nP
nP
nP
P
P
P
y
R
b
ax
d
y
R
b
ax
d
y
b
ax
d
y
b
ax
d
1
1
1
1
1
1
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
39
Z równań odchyłek (wzór 18) tworzy się równania normalne o postaci:
(19)
Rozwiązanie równań pozwala wyznaczyć osie teoretyczne szyny lewej i
prawej odległe o zadaną wartość rozstawu, a następnie odchyłki
rzeczywistych osi od teoretycznych.
0
2
2
0
2
2
2
L
P
L
P
y
R
y
nb
a
x
x
y
R
xy
b
x
a
x
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
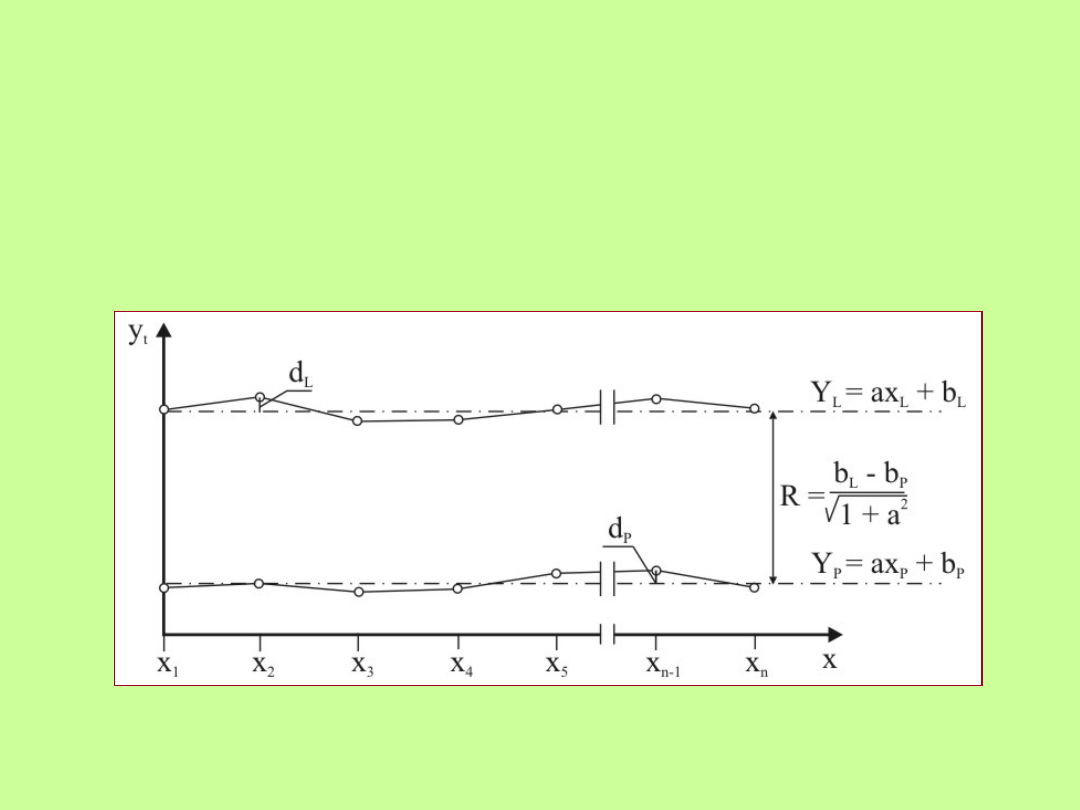
40
Trzecim sposobem jest jednoczesne wyznaczenie dla obu osi rzeczywistych
dwóch odpowiadających im równań optymalnych osi teoretycznych
wzajemnie równoległych, przy zastosowaniu metody najmniejszych
kwadratów o postaci.
dla szyny 1
dla szyny 2
z zachowaniem warunku:
(20)
Rozstaw między wyznaczonymi osiami optymalnymi wyznacza się z
równania:
(21)
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
1
1
b
ax
Y
i
i
2
2
b
ax
Y
i
i
min
2
2
21
2
1
1
i
i
i
y
Y
y
Y
2
1
2
1 a
b
b
R
opt
41
Równania odchyłek dla omawianego sposobu mają następującą postać:
(22)
Na podstawie zestawionych równań odchyłek tworzy się równania
normalne o postaci:
(23)
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
nL
L
nL
nL
L
L
L
L
nP
P
nP
nP
p
P
P
P
y
b
ax
d
y
b
ax
d
y
b
ax
d
y
b
ax
d
1
1
1
1
1
1
0
0
0
2
2
L
L
L
P
P
P
L
L
P
P
L
L
P
P
L
P
y
nb
a
x
y
nb
a
x
y
x
y
x
b
x
b
x
a
x
x
42
Układ osi optymalnych wpasowanych w osie rzeczywiste przy
rozstawie optymalnym
Rozwiązanie
równań
normalnych
pozwala
na
wyznaczenie
niewiadomych, a, b
L
, b
P
, które po podstawieniu do równań odchyłek
(wzór 22) pozwalają na określenie wartości odchyleń osi rzeczywistych
od teoretycznych (optymalnych) i są podstawą do wyznaczenia wartości
koniecznych przesunięć osi toru do położenia teoretycznego
(optymalnego), co przedstawiono na rysunku.
Wyznaczenie położenia osi szyn suwnicowych
sposobem analitycznym
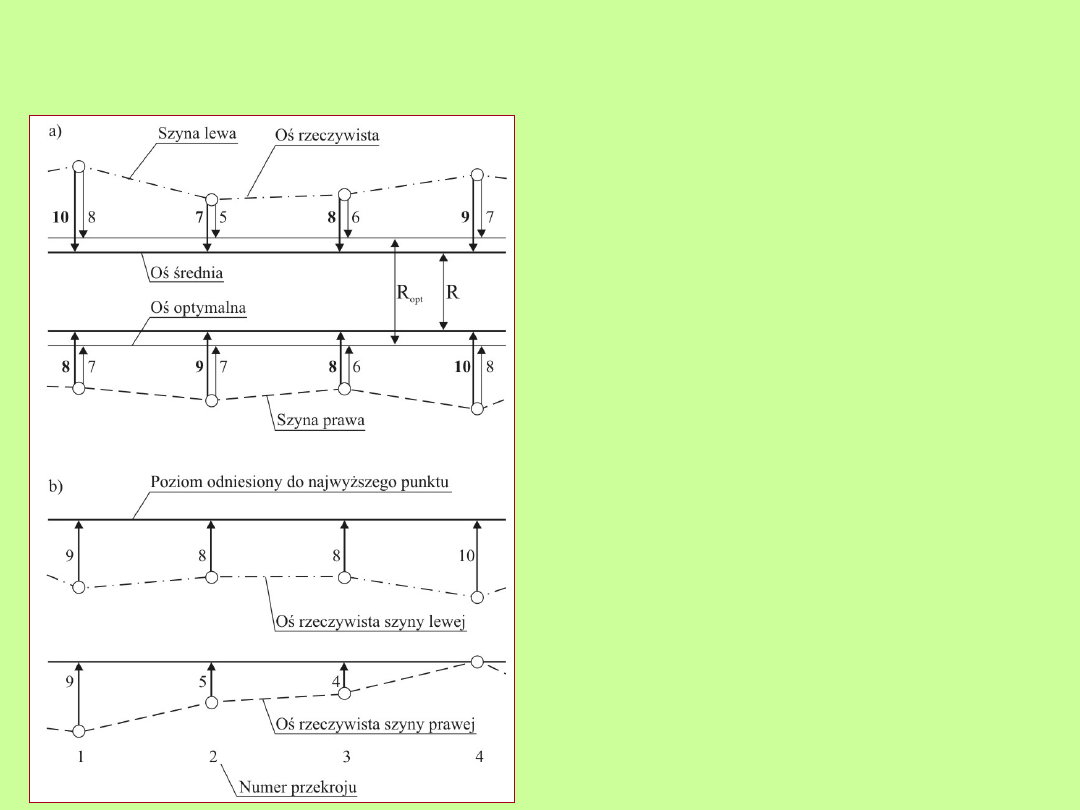
43
Opracowanie projektu rektyfikacji
szyn toru podsuwnicowego
Projekt rektyfikacji przedstawia się
w
formie
szkicu,
na
którym
umieszczone są poprawki (odchyłki
usytuowania)
pozwalające
na
dostosowanie układu szyn toru do
wymagań określonych przepisami
technicznymi.
Szkic projektu rektyfikacji fragmentu
toru podsuwnicowego: a) w
płaszczyźnie poziomej, b) w
płaszczyźnie pionowej
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
Wyszukiwarka
Podobne podstrony:
PN 86 B 02005 Obciazenia budowli Obciazenie suwnicami pomostowymi, wciagarkami i wciagnikami
6. Proces poszerzenia UE, Instytucje UE
szprawozdanie z suwnicy
suwnica moja
urzadenia przeladunkowe, dzwigi suwnice
Suwnica elektryczna z kabiną, Instrukcje-Bezpiecznej Pracy
INSTRUKCJA Czynnościowa Suwnicowego
Sprawozdaniehyla, AGH, Semestr 5, miut, moje, Sprawozdanie suwnica
obwiednia suwnicy
BHP obsługi suwnic elektrycznych w zakładach pracy, 3 przy pracach
Suwnice, lolo, WSB, II płyta, Techniczne bhp
Suwnicowy, Instrukcje-Bezpiecznej Pracy
Suwnica materialy
Komedia poszerza horyzonty
szkol-suwnicowy, BHP, Program szkolenia, instruktaz stanowiskowy
suwnice
więcej podobnych podstron