
Automatyka i regulacja
automatyczna
Wykład 10
Regulatory dyskretne
i regulacja dyskretna
2
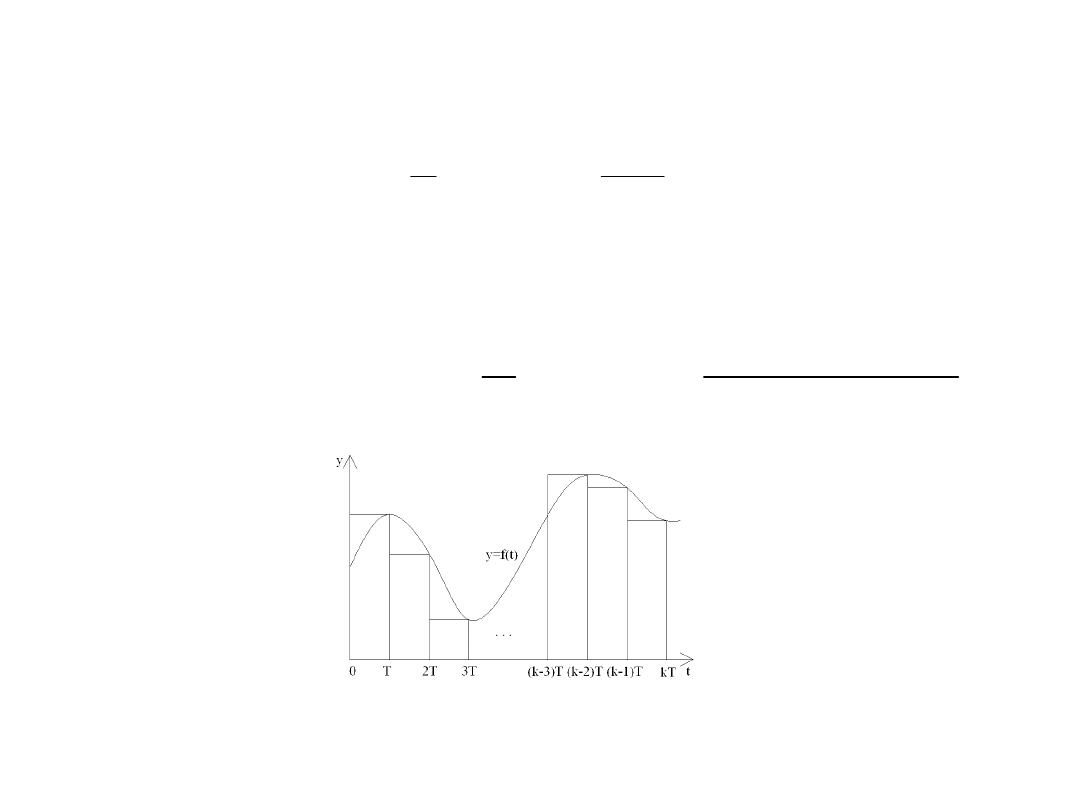
Regulator dyskretny PID
dt
t
de
T
d
e
T
t
e
k
t
u
d
t
i
p
)
(
)
(
1
)
(
)
(
0
p
p
p
d
n
k
p
i
p
p
p
p
T
T
n
e
nT
e
T
kT
e
T
T
nT
e
k
nT
u
]
)
1
[(
)
(
)
(
)
(
)
(
0
Algorytm pozycyjny PID
regulator
analogowy
3
n
k
p
p
p
t
kT
e
T
k
e
T
d
e
1
0
)}
(
]
)
1
[(
{
2
)
(
p
p
p
d
p
n
k
p
i
p
p
p
p
T
T
n
e
nT
e
T
kT
e
T
k
e
T
T
nT
e
k
nT
u
]
)
1
[(
)
(
)}
(
]
)
1
[(
{
2
)
(
)
(
1
4
].
)
1
[(
)
(
p
p
T
n
u
nT
u
u
p
p
p
d
n
k
p
i
p
p
p
p
T
T
n
e
T
n
e
T
kT
e
T
T
T
n
e
k
T
n
u
]
)
2
[(
]
)
1
[(
)
(
]
)
1
[(
]
)
1
[
1
0
p
p
p
p
d
p
p
i
p
p
T
T
n
e
T
n
e
nT
e
T
T
n
e
nT
e
T
T
k
u
]
)
2
[(
]
)
1
[(
2
)
(
]
)
1
[(
)
(
1
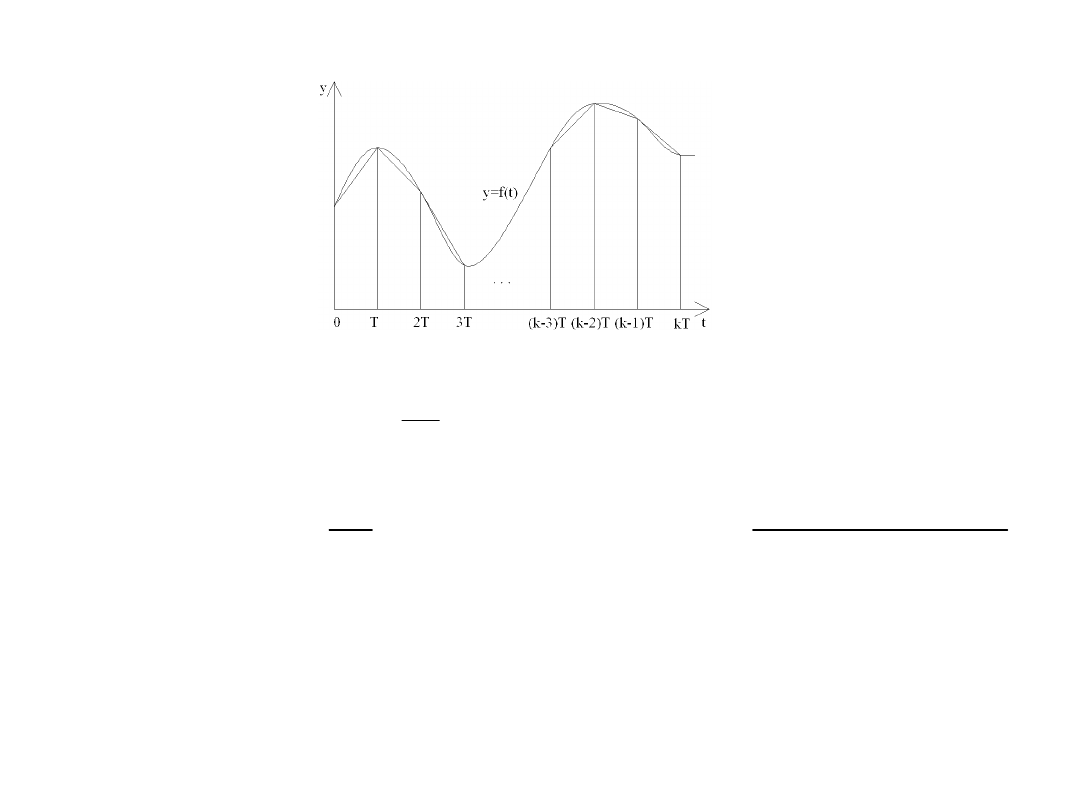
Algorytm przyrostowy PID
5
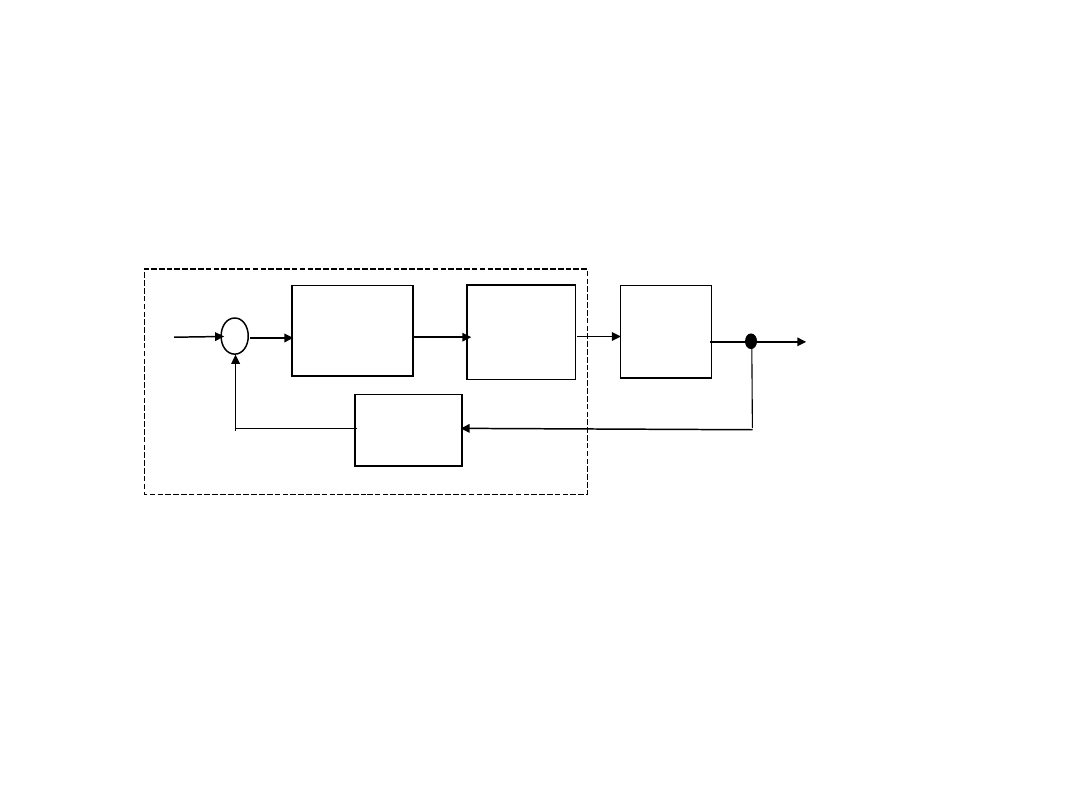
Schemat blokowy układu regulacji
dyskretnej
Regulator
wyznaczający
sterowanie u
Przetwornik
C/A
Obiekt
regulacji
Przetworni
k
A/C
w
e
–y
u
u(t
)
y(t)
6
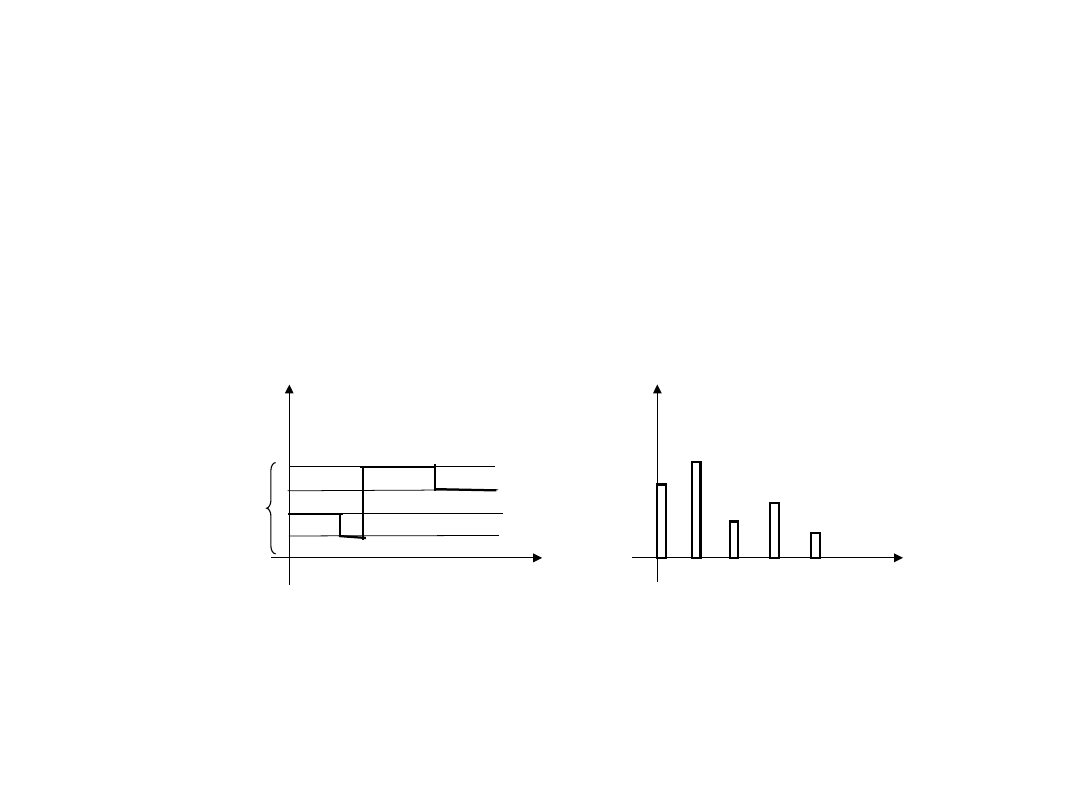
Sygnały dyskretne: a) sygnał dyskretny w
poziomie (skwantowany), b) sygnał dyskretny w
czasie (spróbkowany), T
p
– okres próbkowania.
u
u
t
t
0
0
T
p
2T
p
3T
p
4T
p
a)
b)
p
o
zi
o
m
y
k
w
a
n
to
w
a
n
i
a
7
T
p
T
p
0
2T
p
3T
p
u
u(0)
u(T
p
)
u(2T
p
)
u(3T
p
)
u
2T
p
3T
p
0
t
t
e
t
0 T
p
2T
p
3T
p
e(0)
e(T
p
)
e(2T
p
)
e(3T
p
)
a)
b)
c)
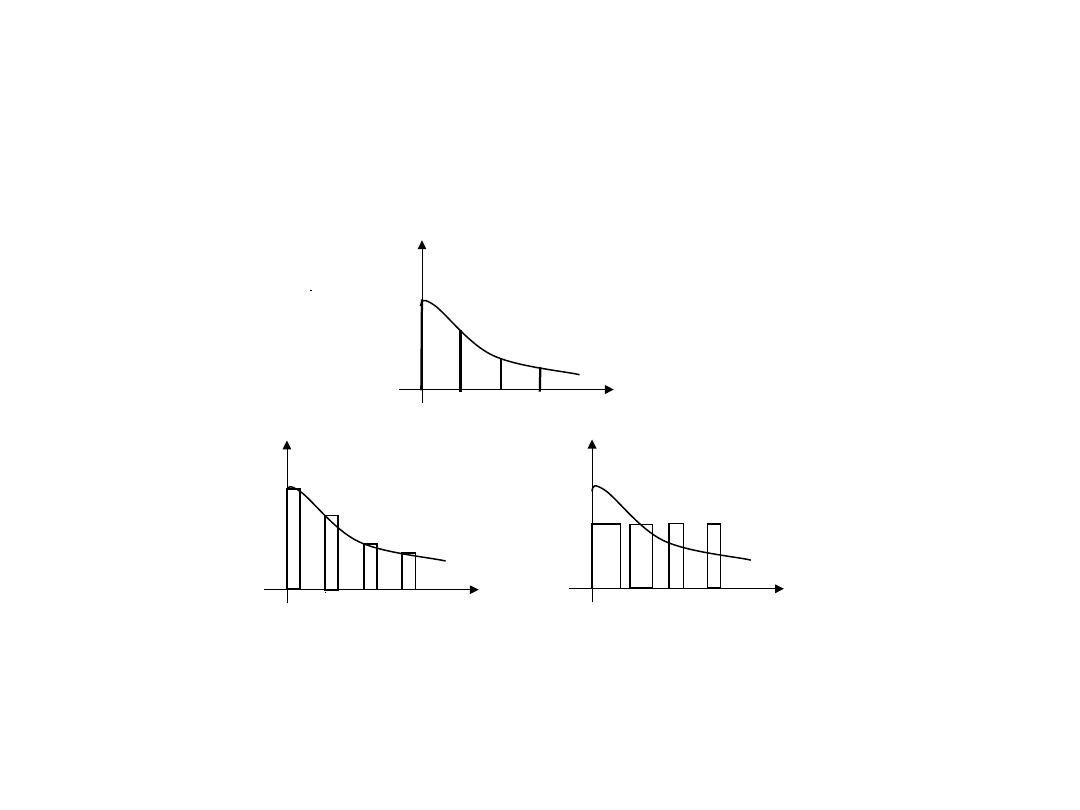
Próbki błędu regulacji (a) i impulsy sterujące (b i c)
8
T
p
2T
p
3T
p
4T
p
5T
p
6T
p
t
0
e(t)
Poziomy
kwantowania
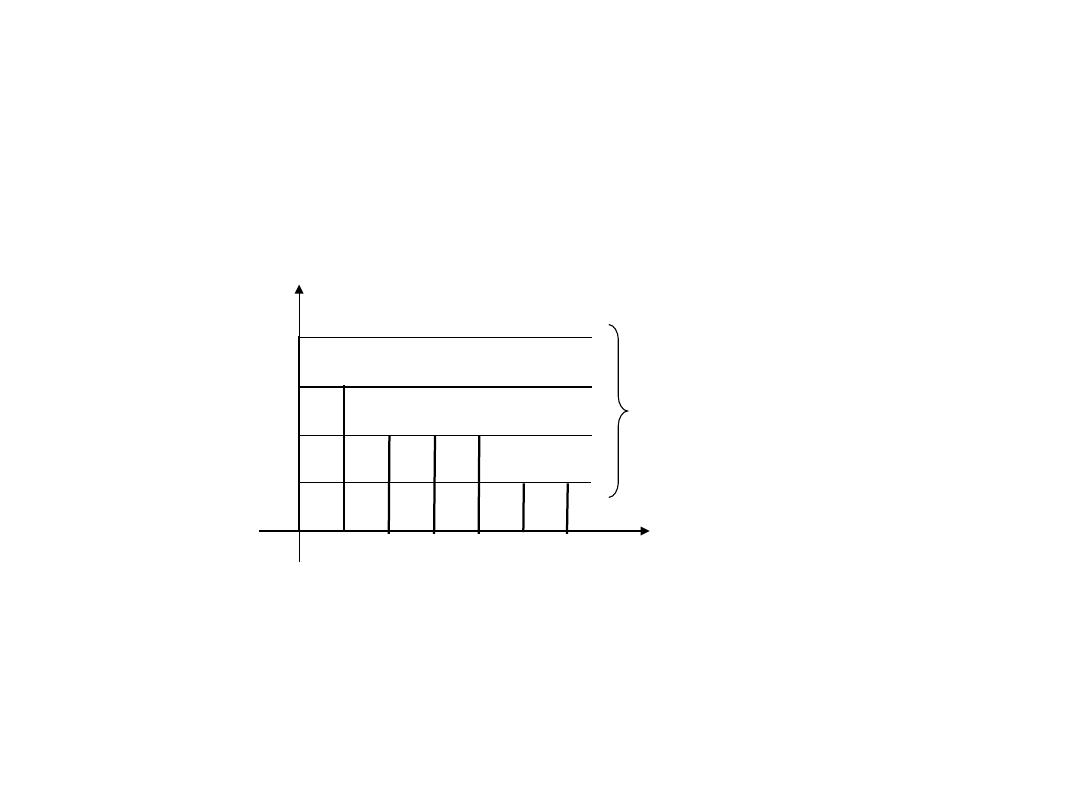
Skwantowany i spróbkowany sygnał błędu regulacji
Document Outline
Wyszukiwarka
Podobne podstrony:
10 Automatyka i regulacja automatyczna test
Podstawy Automatyki Lab 10 CW6 ?danie regulatora PID
Automatyczna regulacja zasięgu reflektorów przegląd podzespołów
Instalowanie urządzeń automatyki i obsługa prostych układów automatycznej regulacji
Podstawy Automatyki Lab 10 CW3 Układy sekwencyjne elektroniczne
Podstawy Automatyki Lab 10 CW1 Układy przełączające oparte na elementach stykowych
DOBÓR NASTAW REGULATORÓW W MODELOWYM UKŁADZIE AUTOMATYCZNEJ REGULACJI, SGGW Technika Rolnicza i Leśn
Laboratorium automatyki Regulacja impulsowa
Komputer w układzie automatycznej regulacji (2)
Podstawy automatyki (w 3) regula id 366722
16 Podstawy automatyki regulatory optymalne
Podstawy automatyki i regulacji cd
1. Zadania i metody automatycznej regulacji, pytania egzamin inżynierski AiR ARS
Automatyka i regulacja automatyczna
Czujnik poziomu zawieszenia w samochodach z automatyczną regulacją zasięgu reflektorów przód
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
więcej podobnych podstron