
Elementy
wykonawcze
robotów
Sprawozdanie 4

Spis treści:
• określenie siły chwytu
• określenie siły na siłowniku
• określenie parametrów napędu
• przedstawienie trzech możliwych rozwiązań
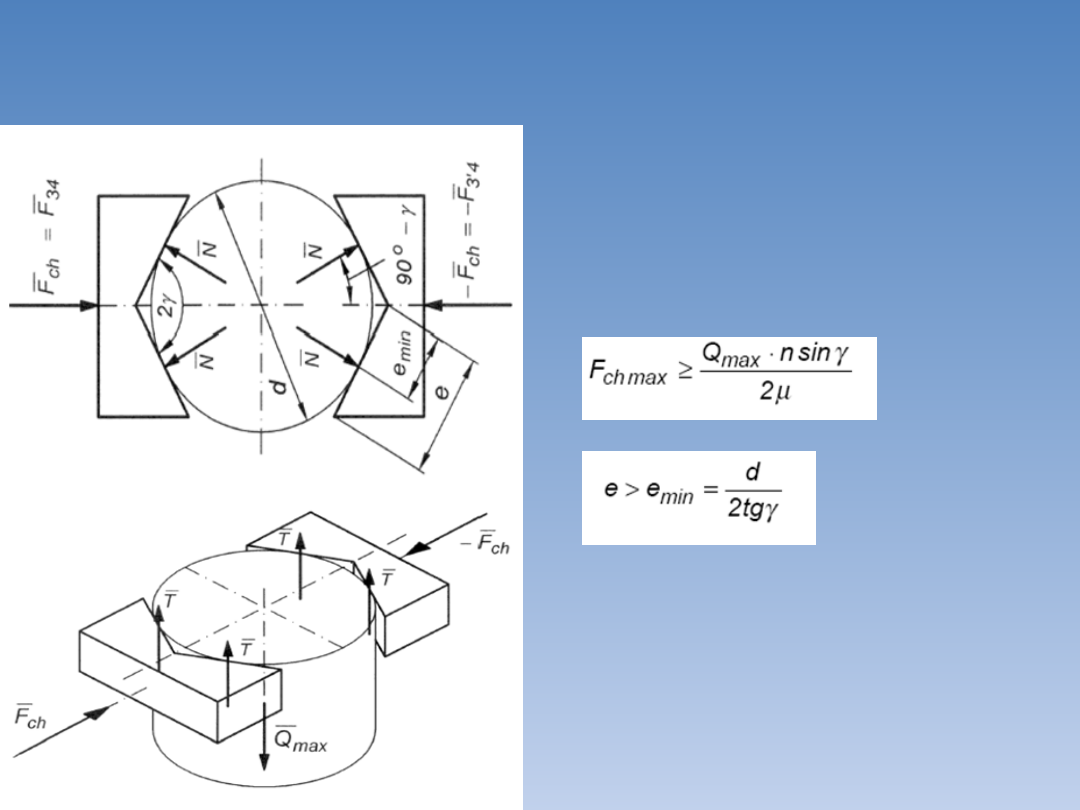
określenie siły chwytu

określenie siły chwytu
• d = od 149.4 do 182.6 mm
• Q = 36.93 N
• µ = 0.20 (przy zastosowaniu wkładki poliestrowej)
• n = 2
• 2ϒ = 136°
• F > 342,5 N
• e > 36,9 mm
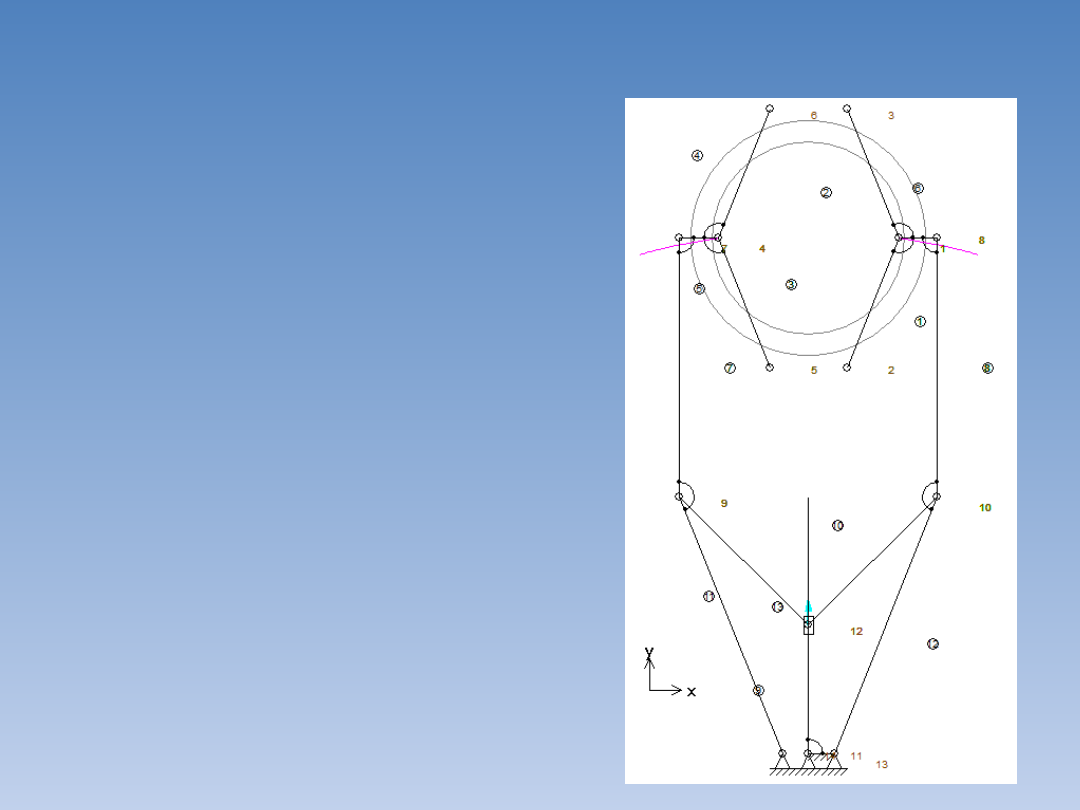
określenie siły na siłowniku
• F > 342,5 N
• e > 36,9 mm
• Rx = 2*R1 cos
45°
• F = Rx = 1112 N
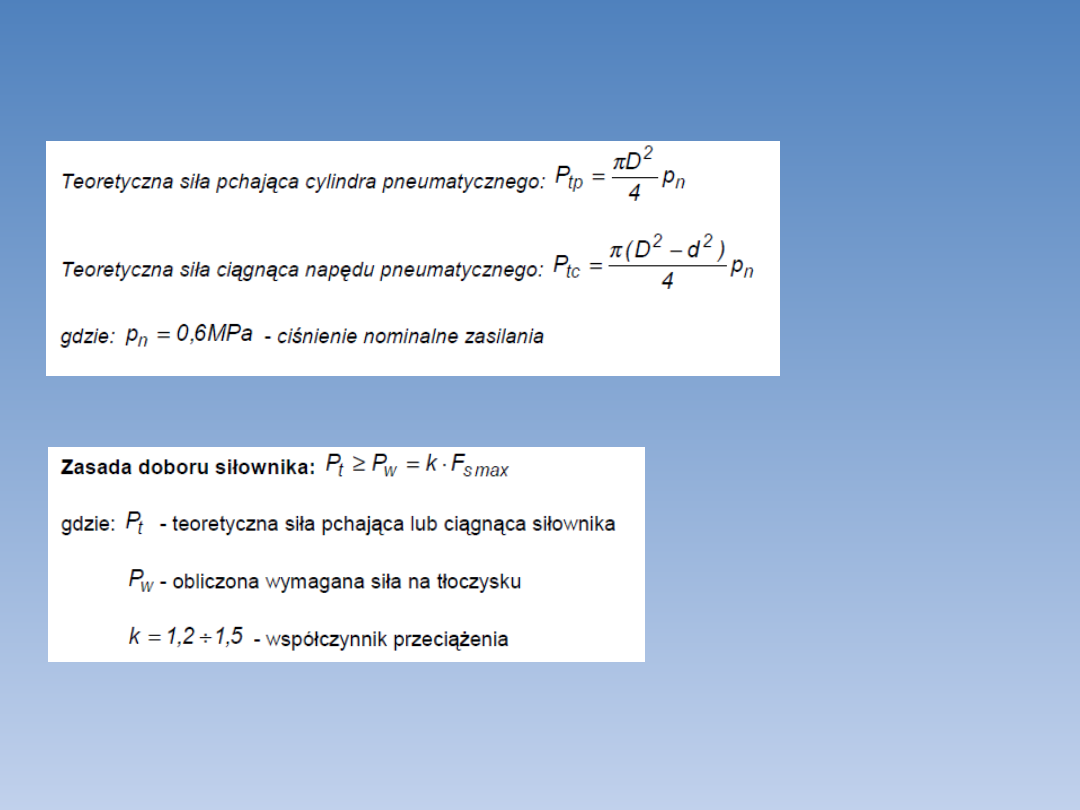
określenie parametrów napędu

określenie parametrów napędu
• Pt > Pw
• Pw = 1.2 * 1112 N = 1334.4 N
• Pt > 1334.4 N
• D ≈ 54 mm
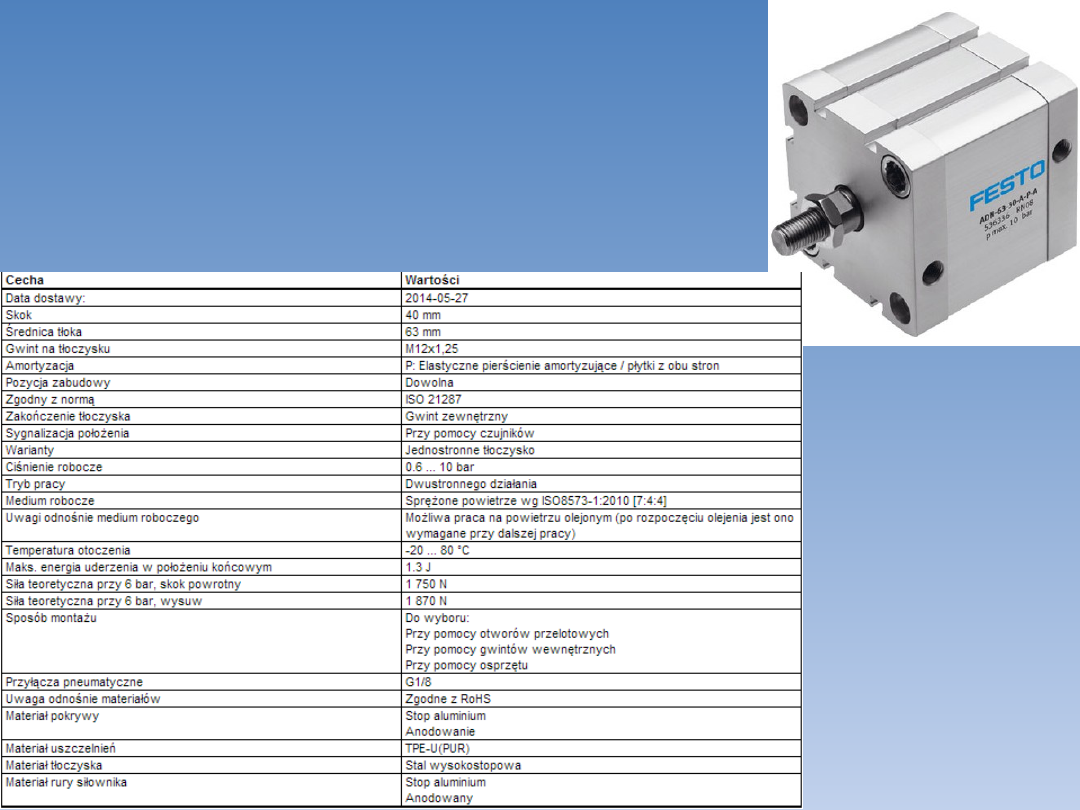
przedstawienie możliwych
rozwiązań
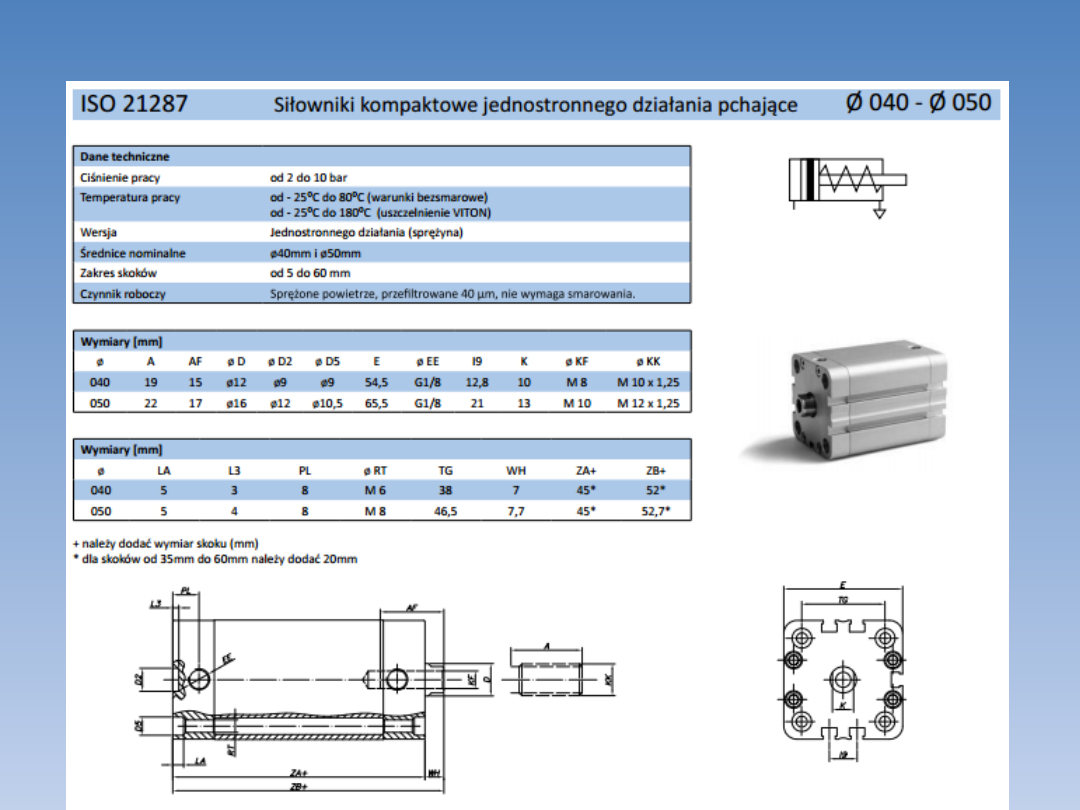
• Siłownik kompaktowy ADN-63-40-A-P-A
przedstawienie możliwych rozwiązań
Document Outline
- Slide 1
- Spis treści:
- określenie siły chwytu
- określenie siły chwytu
- określenie siły na siłowniku
- określenie parametrów napędu
- określenie parametrów napędu
- przedstawienie możliwych rozwiązań
- przedstawienie możliwych rozwiązań
Wyszukiwarka
Podobne podstrony:
Obliczenie siły krytycznej metodą energetyczną
26 Podać zasady obliczania współrzędnych na podstawie odległości i azymutu na elipsoidzie (zadanie
obliczanie?resu sieci na podstawie?resu ip ZFOLETT46QUD6ZVJW3ZRWLWAP2J7OELQKWDJPSA
przykladowy projekt 3, naddatki, Obliczam naddatki na obróbkę
fiz20-ad, Wynikiem działania siły na elektron będzie zakrzywienie jego toru w płaszczyznie prostopad
Odżywianie, Ćwiczenia na Siłownie
Tabela obliczania zapotrzebowania na ciepło - madziara, Budownictwo UTP, II rok, IV semestr, Instala
Czyli mierz siły na zamiary, Fan Fiction, Dir en Gray
Formularz 2 Formularz oblicze zapotrzebowania na ciepo
Przykładowe treningi na mase, na siłownie, ćwiczenia, Już ułożone
Kszta towanie masy mi niowej, Ćwiczenia na Siłownie
Jak wrócić na siłownię po dłuższej przerwie, Kulturystyka i fitnes
Prawda ma prawie zawsze dwa oblicza, Prace na polski
OBLICZANIE ZAPOTRZEBOWANIA NA KCAL (1)
PN B 02864 Ochrona p poż bud P poż zaopatrzenie wodne Zasady obliczania zapotrzebowania na wodę do
Instrukcja29 Obliczanie zapotrzebowania na moce produkcyjne na poziomie MPS
PLAN - RZEŹBA, Ćwiczenia na Siłownie
Obliczenie przepustowości na wlotach skrzyżowania, aDrogi i ulice 2 projekt
więcej podobnych podstron