Wykonał: Tomasz Gawłowicz
Mechanika i Budowa Maszyn
VI semestr
Systemy
transportowo - -
podające

Systemy transportowo podające
składają się z dwóch
podstawowych elementów:
Podsystemu transportowego –
służącego do zmiany położenia,
czyli do przemieszczenia
przedmiotów, narzędzi lub
pomocy warsztatowych.
Przemieszczanie może odbywać
się między centralnym
magazynem a stanowiskami
obróbczymi, między magazynami
lub między poszczególnymi
stanowiskami wytwórczymi.
Manipulacji – służącej do
przemieszczania przedmiotów
obrabianych lub narzędzi z
dodatkowym zmienianiem ich
orientacji. Manipulacja ma na celu
przemieszczanie przedmiotów lub
narzędzi z magazynów na środki
transportu oraz ze środków
transportu na obrabiarki.
Systemy
transportowo
podające

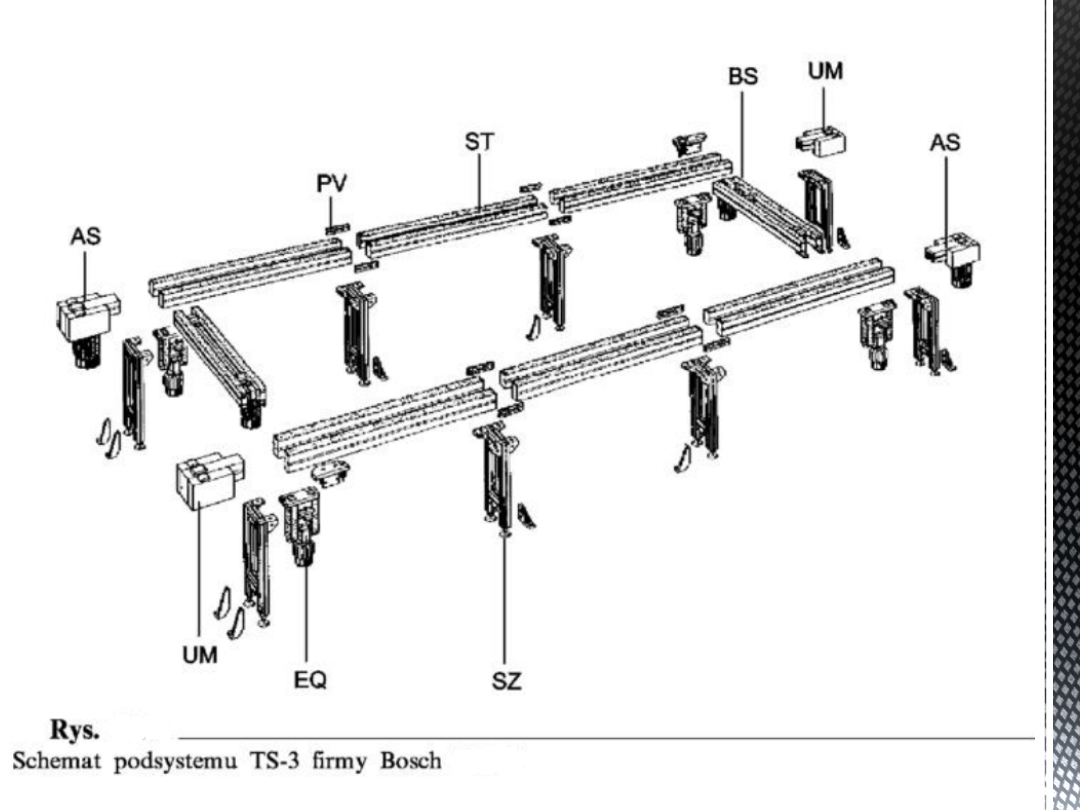
Interesujący przenośnikowy
podsystem przemieszczania
przedmiotów został
opracowany przez firmę
Bosch. Przenośniki te
charakteryzują się lekką
konstrukcją, a typowe moduły
umożliwiają budowę systemu
w dowolnej konfiguracji.
Przemieszczanie się
przedmiotów w tym systemie
odbywa się na paletach za
pośrednictwem nośników
płytowych
Podsystem
firmy BOSCH
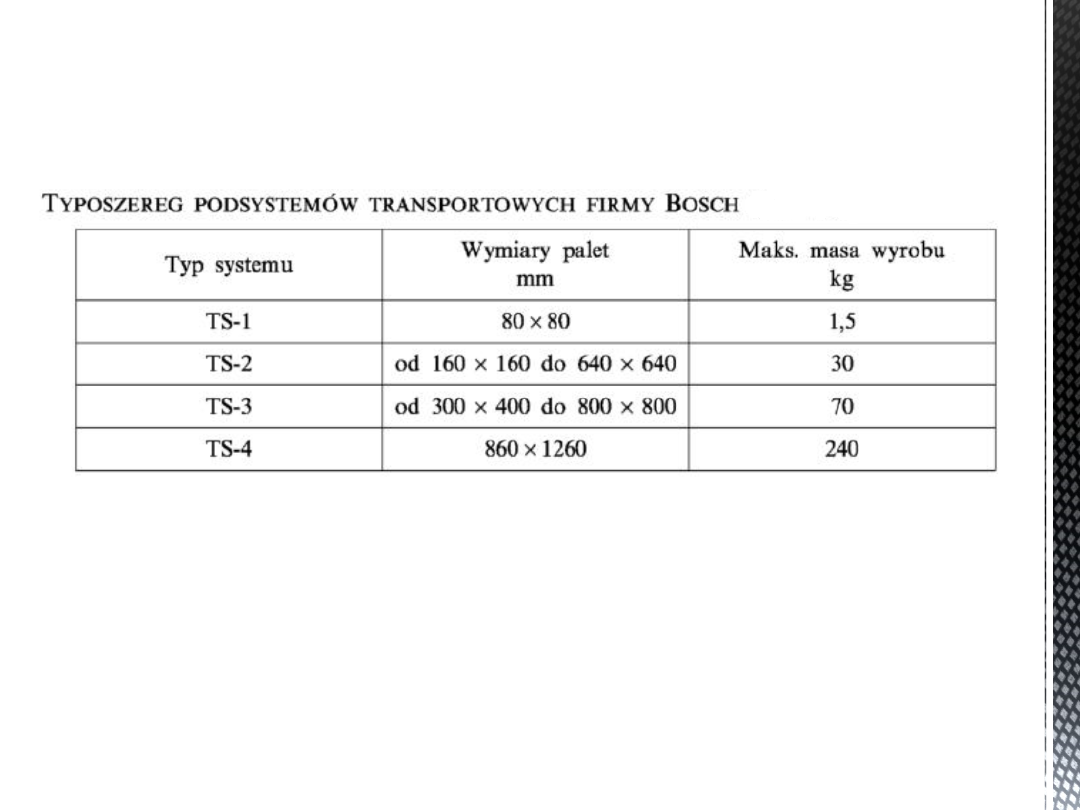
W zależności od gabarytów i masy przedmiotów firma Bosch proponuje
4 warianty systemów transportowych.
Palety transportowe składają się z dwóch podstawowych części: ramy
(wykonanej z metalu np. aluminium) , oraz płyty nośnej ( wykonanej z
tworzywa sztucznego lub metalu)

Manipulacja przedmiotami
jest potrzebna w celu ich
przemieszczenia z
magazynu przedmiotów na
środek transportu oraz ze
środka transportu na
obrabiarkę. Główny problem
techniczny w manipulowaniu
przedmiotami polega na ich
identyfikacji, identyfikacji ich
położenia oraz
automatyzacji chwytania.
Środki techniczne manipulacji
dzieli się na :
Środki do manipulacji
nośnikami przedmiotów
Środki do manipulacji
przedmiotami
Manipulacja
przedmiotami
obrabianymi
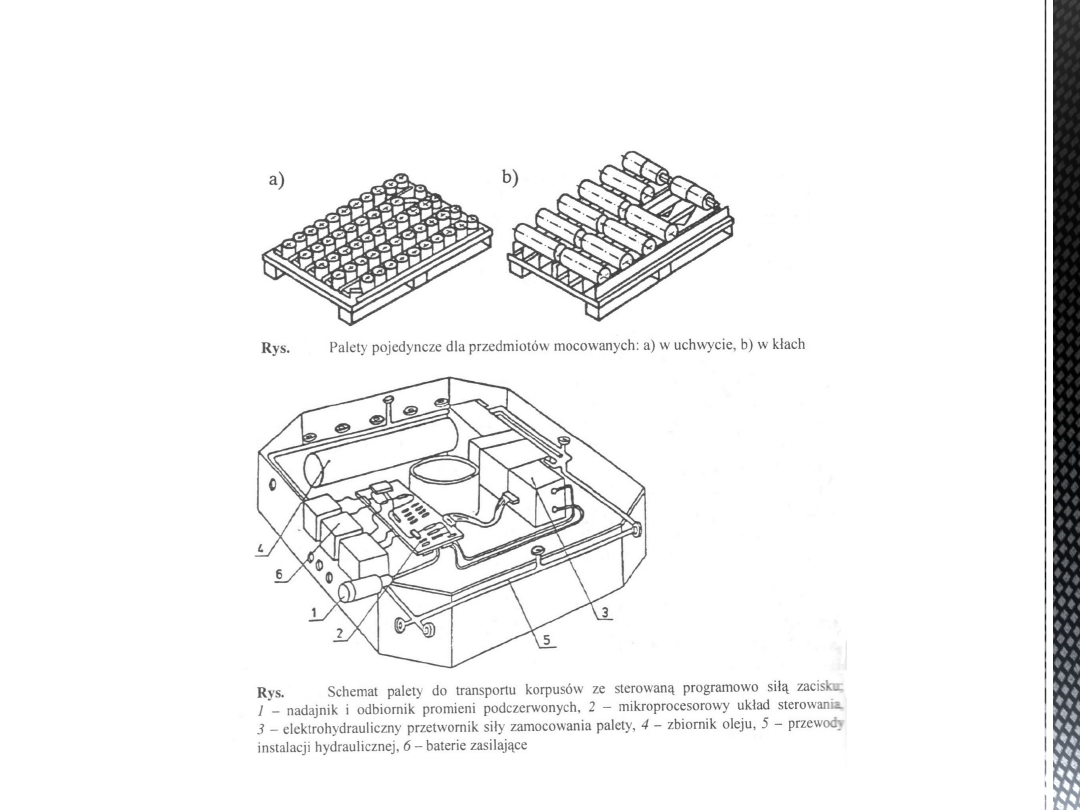
Do pierwszej grupy zalicza się przede wszystkim mechanizmy do
manipulacji paletami z przedmiotami mocowanymi na paletach, a więc
głównie dla przedmiotów typu korpus.

Manipulacja przedmiotami bez mocowania na paletach
jest o wiele bardziej skomplikowana i znacznie mniej
elastyczna. Jest tutaj niezbędny manipulator lub robot,
który musi nie tylko zidentyfikować ale także uchwycić
przedmiot obrabiany.
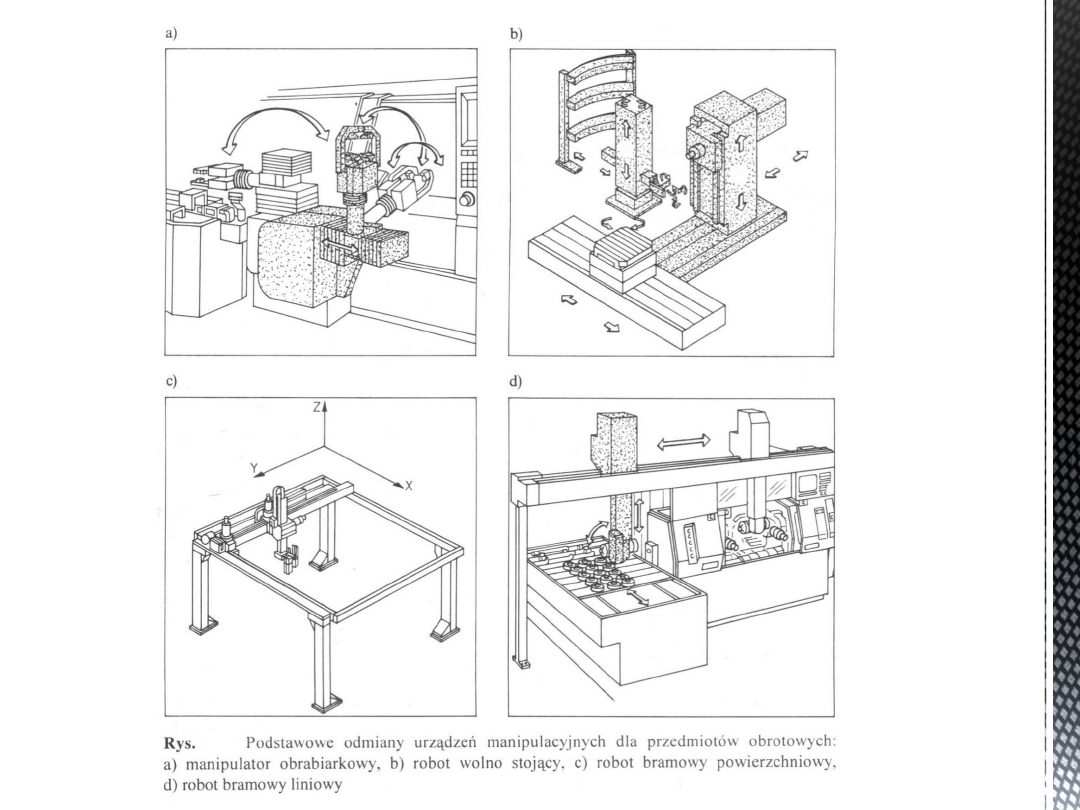
Manipulowanie przedmiotami obrotowosymetrycznymi,
transportowanymi zarówno zbiorowo na paletach jak i
pojedyńczo może być zrealizowana na trzy sposoby:
• Za pomocą manipulatorów zintegrowanych z
obrabiarką. Są to proste manipulatory z jedną osią
sterowaną numerycznie, które zapewniają
uchwycenie przedmiotu i przemieszczenie go do osi
obrabiarki
• Za pomocą robotów wolnostojących, usytułowanych
obok obrabiarki i obsługujących ją zarówno z boku
jak i od czoła
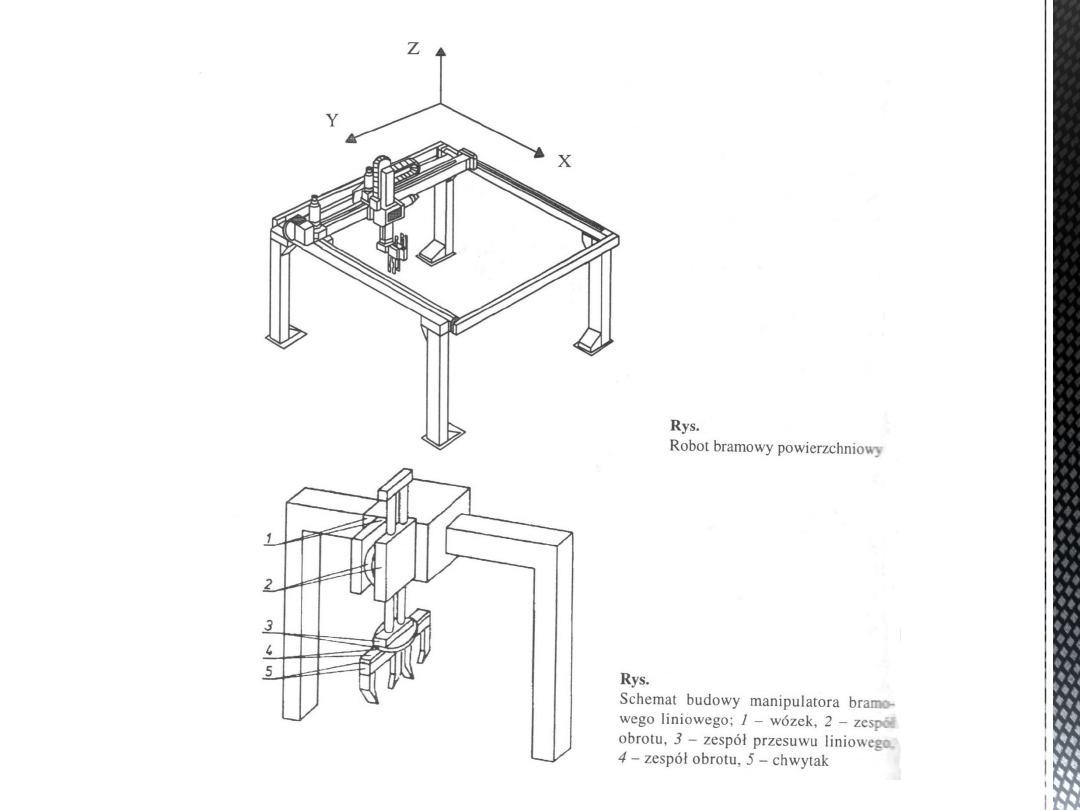
• Za pomocą tzw. Manipulatorów bramowych
usytułowanych ponad obrabiarką i obsługujących ją
z góry. Zapewniają one łatwy dostęp do przestrzeni
roboczej, są także łatwe do rozbudowy.
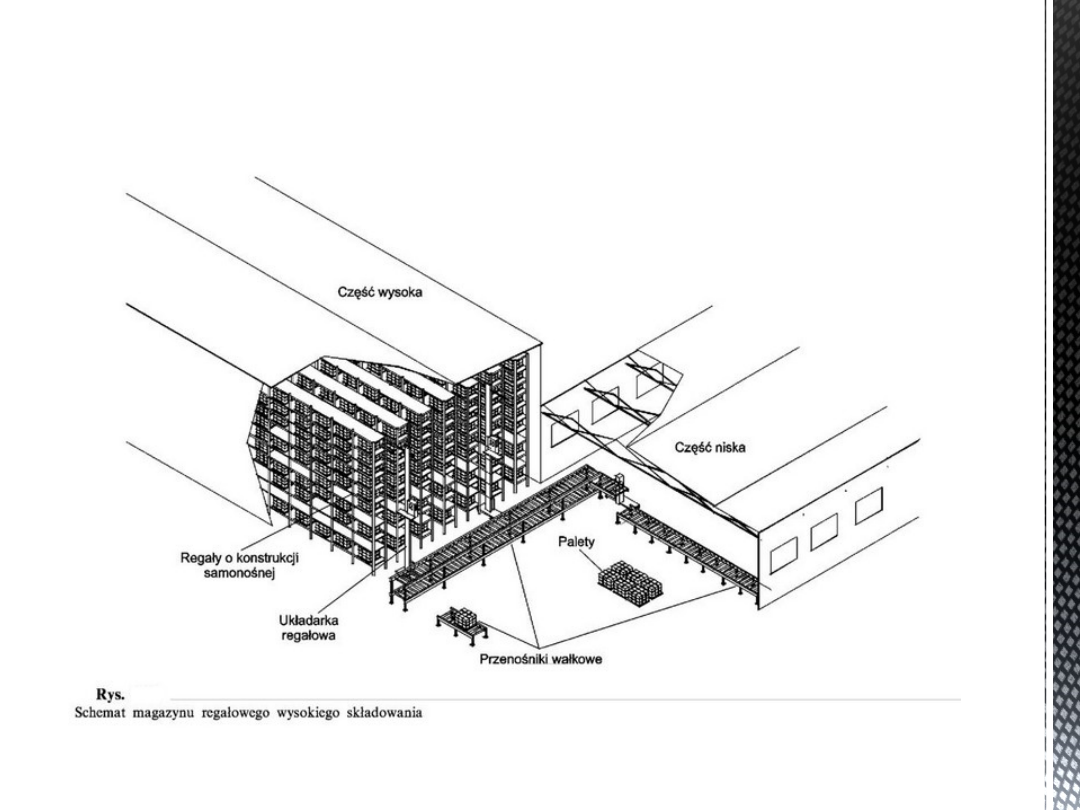
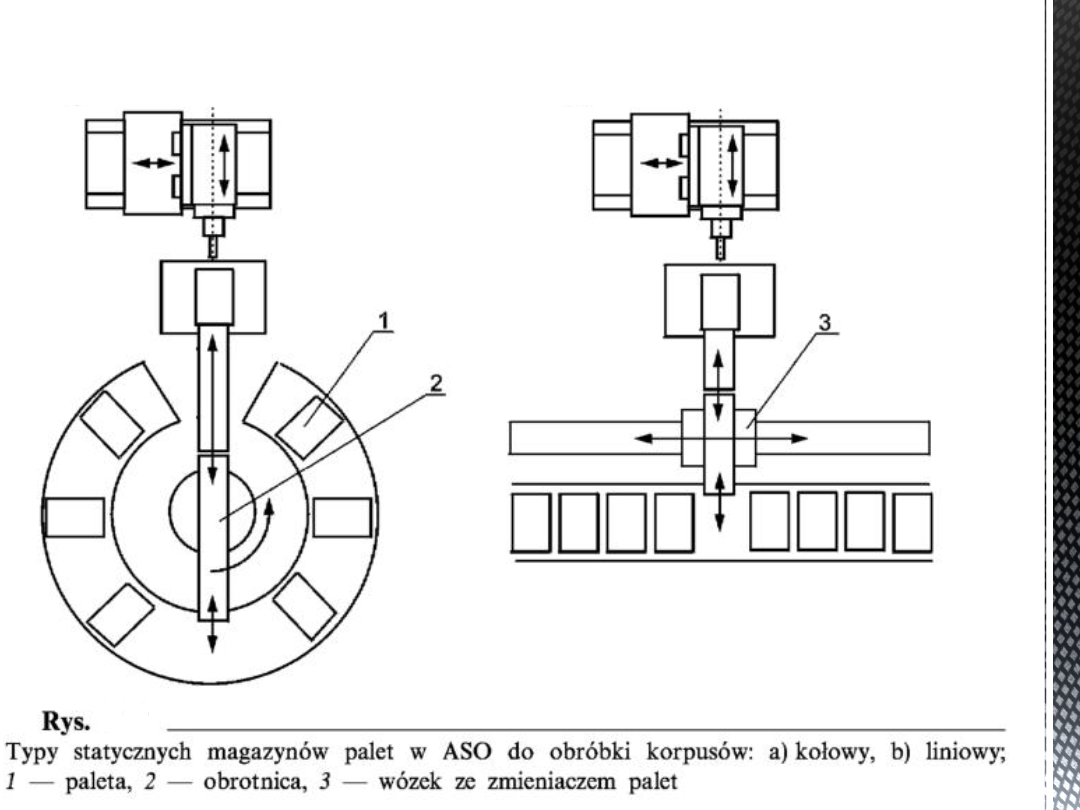
Magazynowanie przedmiotów obrabianych
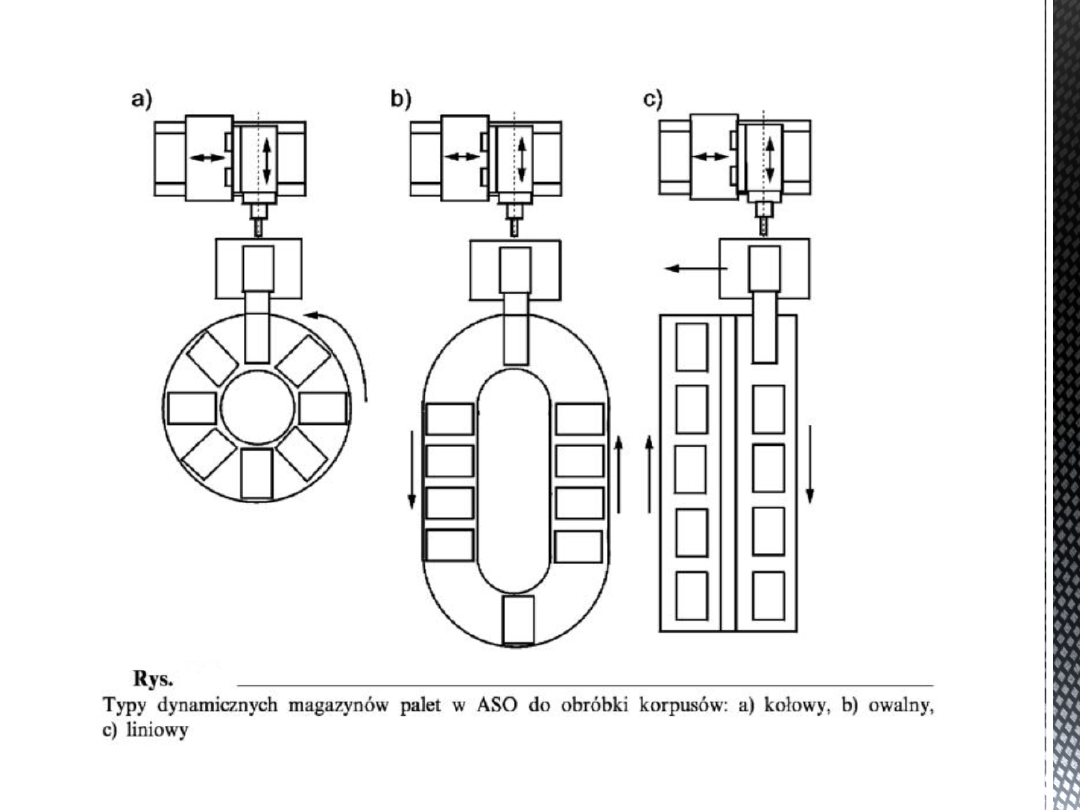
Przystanowiskowe magazyny przedmiotów korpusowych


Dziękuje za uwagę
Literatura:
• J. Honczarenko Elastyczna automatyzacja wytwarzania, WNT
Warszawa 2000
• J. Kosmol Automatyzacja obrabiarek i obróbki skrawaniem, WNT
Warszawa 1995,2000
• Źródła internetowe:
http://www.flexlink.com/pl/home/industries/automotive
Document Outline
- Systemy transportowo - - podające
- Systemy transportowo podające
- Podsystem firmy BOSCH
- Slide 4
- Slide 5
- Slide 6
- Manipulacja przedmiotami obrabianymi
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
Wyszukiwarka
Podobne podstrony:
~$Systemy transportowo podające
Montwiłł Węzły transportowe w europejskim systemie transportu
SYSTEMY TRANSPOROWE word
wrocław systemy transportowe
zal systemy transportowe
systemy sciaga, systemy transportowe
Relacje miedzy zagospodarowaniem przestrzennym a systemem transportowym, Studia, Sem 5, SEM 5 (wersj
SYSTEM TRANSPORTOWY kolos 2
63 Systemy transportu substancji przez blone
160 Omow wspoldzialanie systemow transportu podczas wytwarzania kwasu solnego w zoladku
Przewozy - studenci-2011-2012, Systemy transportowe I
SYSTEMY TRANSPORTOWE projekt
systemy transportowe
Podstawowe rodzaje zadań (wobec) systemów transportowych
systemy transportowe II (1)
PPK 1 system transportu S
systemy transportowe II (3)
więcej podobnych podstron