INSTYTUT KONSTRUKCJI MASZYN
Katedra Maszyn Roboczych i Transportu Bliskiego
Zespół Napędu i Sterowania Hydraulicznego
LABORATORIUM
MIERNICTWO CIEPLNE I MASZYNOWE
Temat: Badania właściwości przetworników prędkości
liniowej
Grupa: 12M1
Zespół: A
Data wykonania laboratorium: 11.01.2012
Data oddania sprawozdania: 16.01.2012
Lp
Nazwisko i Imię
Ocena
Data
1.
Bartosik Michał
2.
Chramiec Marek
3.
Czubiak Grzegorz
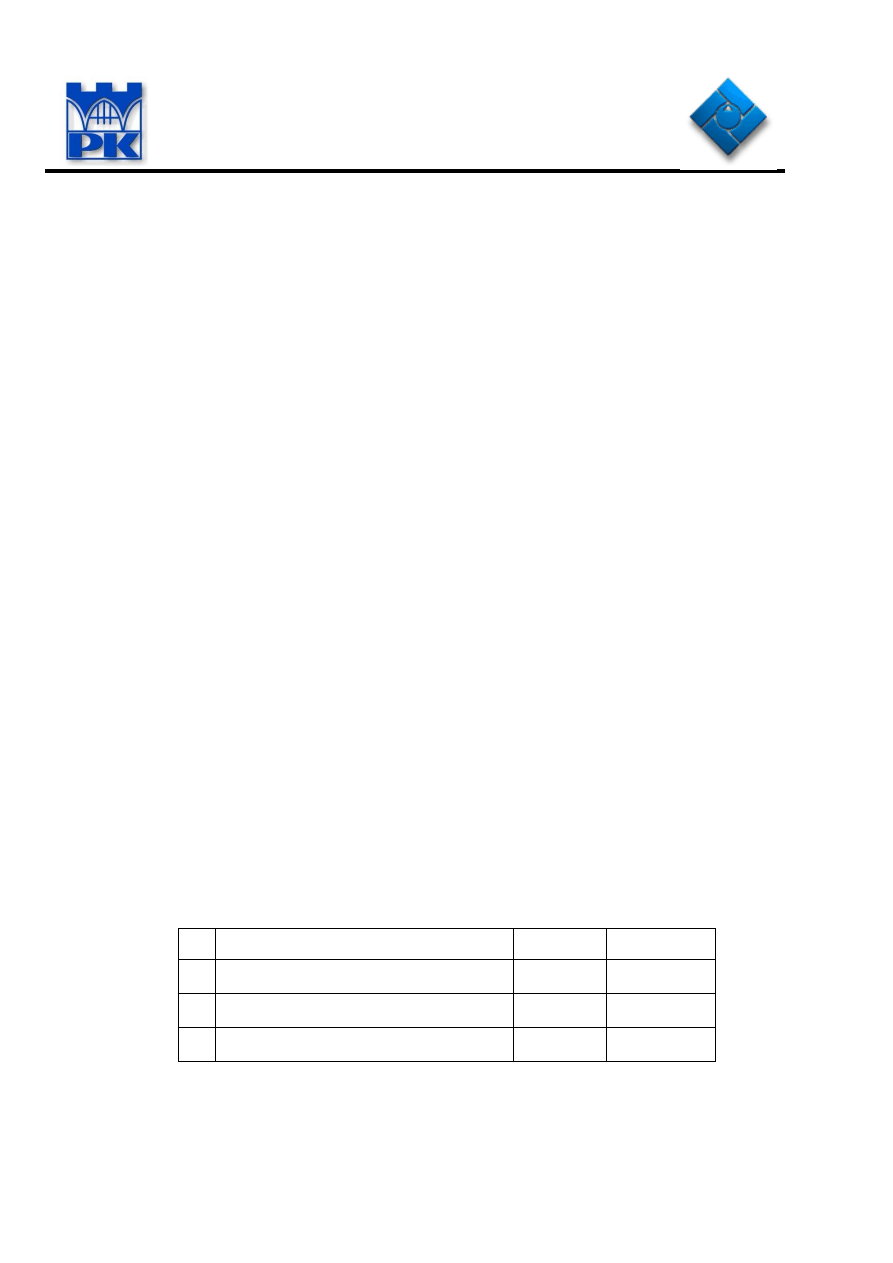
1. Schemat układu pomiarowego:
1
– siłownik
2
– prądnica tachometryczna [V]
3
– czujnik linkowy optoelektryczny [mm]
4
– czujnik linkowy z en koderem [m/s]
2. Wykaz aparatury
- czujnik linkowy optoelektryczny WOBIT HPS-M1-075-10V WOBIT:
zakres pomiarowy 750mm, maksymalna prędkość przesuwu linki 1000mm/s,
liniowość ±0,3% i powtarzalność ±0,05%
- czujnik linkowy z enkoderem STEGMANN MRA-F080-102D2:
zakres 2m, maksymalna
prędkość pracy 4m/s
-
prądnica tachometryczna CELESCO PT5AV-40-N34-BK-10K-M6:
zakres pomiarowy 40” (101cm), maksymalna prędkość pracy 300”/s (7,6m/s),
dokładność ±0,5% i powtarzalności ±0,05%
3. Opis eksperymentu
Na stanowisku złożonym z siłownika oraz trzech wyżej wymienionych czujników
dokonaliśmy pomiaru prędkości tłoka. Wykonując jeden cykl (wysunięcie i wsunięcie tłoka), w
programie LabView. zarejestrowaliśmy sygnały z czujników w postaci prędkości [m/s],
prze
mieszczenia [mm] oraz napięcia [V].
4. Obliczenia i wykresy
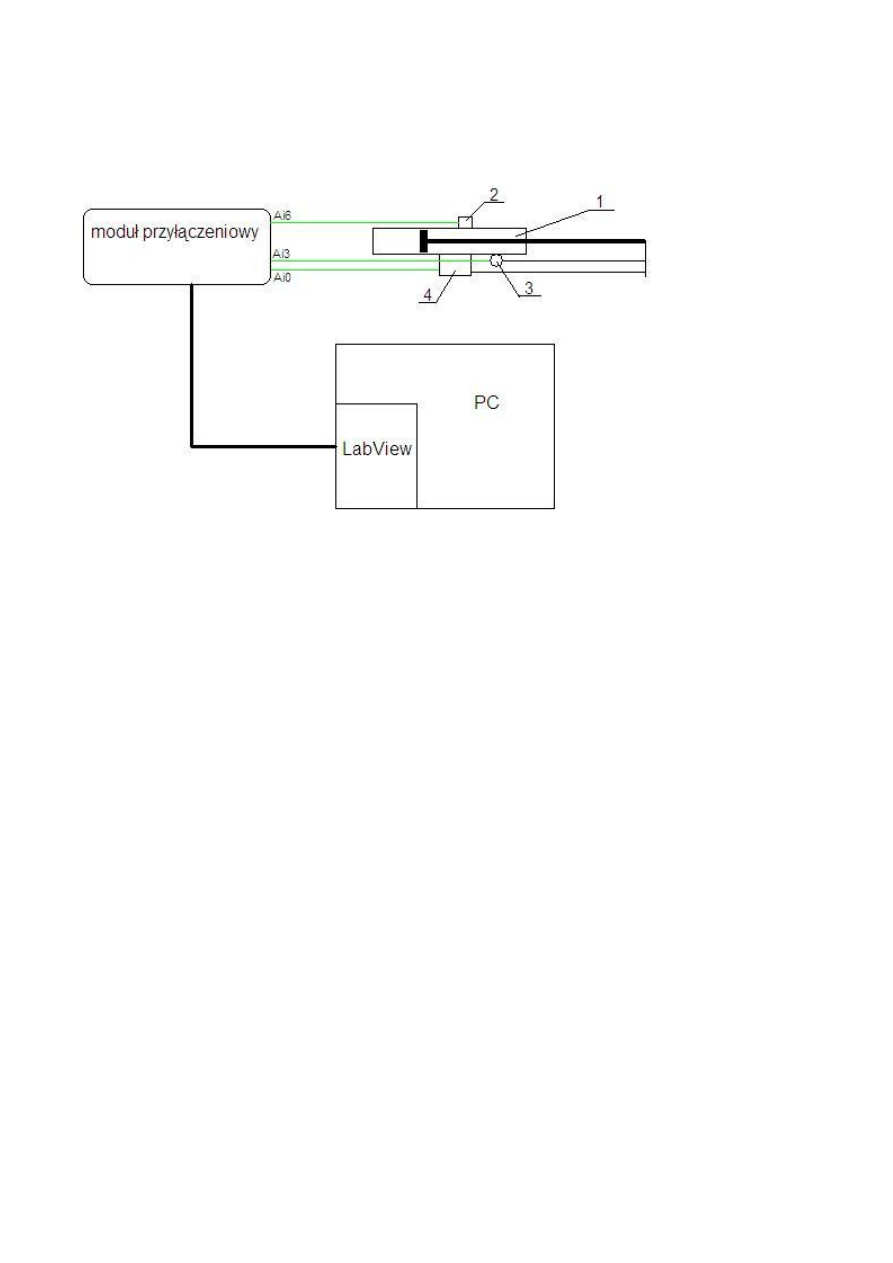
Przebiegi czasowe mierzonych parametrów:
Czujnik linkowy optoelektryczny:
Czujnik linkowy z enkoderem:
Prądnica tachometryczna:
0
50
100
150
200
250
300
350
400
450
0
30
,2
5201
9
31
,4
8201
9
32
,7
1201
9
33
,9
4201
9
35
,1
72
01
9
36
,4
0201
9
37
,6
3201
9
38
,8
6201
9
40
,0
9201
9
41
,3
2201
9
42
,5
5201
9
43
,7
8201
9
45
,0
1201
9
46
,2
4201
9
47
,4
7201
9
48
,7
0201
9
49
,9
3201
9
51
,1
6201
9
52
,3
9201
9
53
,6
2201
9
54
,8
5201
9
56
,0
8201
9
57
,3
1201
9
x [m
m
]
t [s]
x(t)
-5
0
5
10
15
20
25
0
30
,2
5201
9
31
,4
8201
9
32
,7
1201
9
33
,9
4201
9
35
,1
7201
9
36
,4
0201
9
37
,6
3201
9
38
,8
6201
9
40
,0
9201
9
41
,3
2201
9
42
,5
5201
9
43
,7
82
01
9
45
,0
1201
9
46
,2
4201
9
47
,4
7201
9
48
,7
0201
9
49
,9
3201
9
51
,1
6201
9
52
,3
9201
9
53
,6
2201
9
54
,8
5201
9
56
,0
8201
9
57
,3
1201
9
V [m
/s]
t [s]
V(t)
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
0
30
,2
5201
9
31
,4
8201
9
32
,7
1201
9
33
,9
4201
9
35
,1
7201
9
36
,4
0201
9
37
,6
3201
9
38
,8
6201
9
40
,0
9201
9
41
,3
2201
9
42
,5
5201
9
43
,7
8201
9
45
,0
1201
9
46
,2
4201
9
47
,4
7201
9
48
,7
0201
9
49
,9
3201
9
51
,1
6201
9
52
,3
9201
9
53
,6
2201
9
54
,8
5201
9
56
,0
82
01
9
57
,3
1201
9
U[V]
t [s]
V(t)
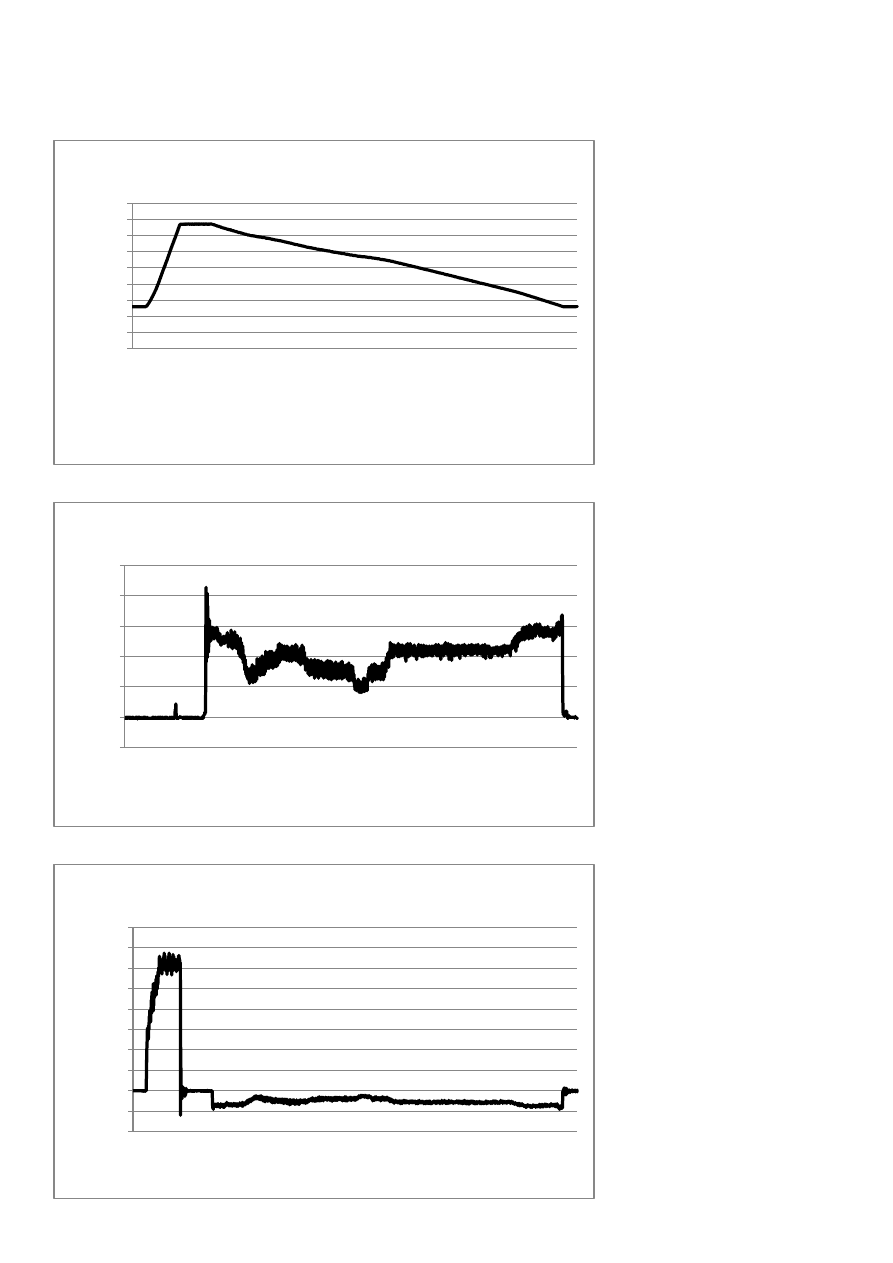
Obliczyliśmy współczynnik skali dla prądnicy tachometrycznej, który wyniósł 0,100352 oraz
wyskalowaliśmy czujnik linkowy z en koderem (współcz: 0,007346), który pokazywał nieprawdziwe
wielkości prędkości.
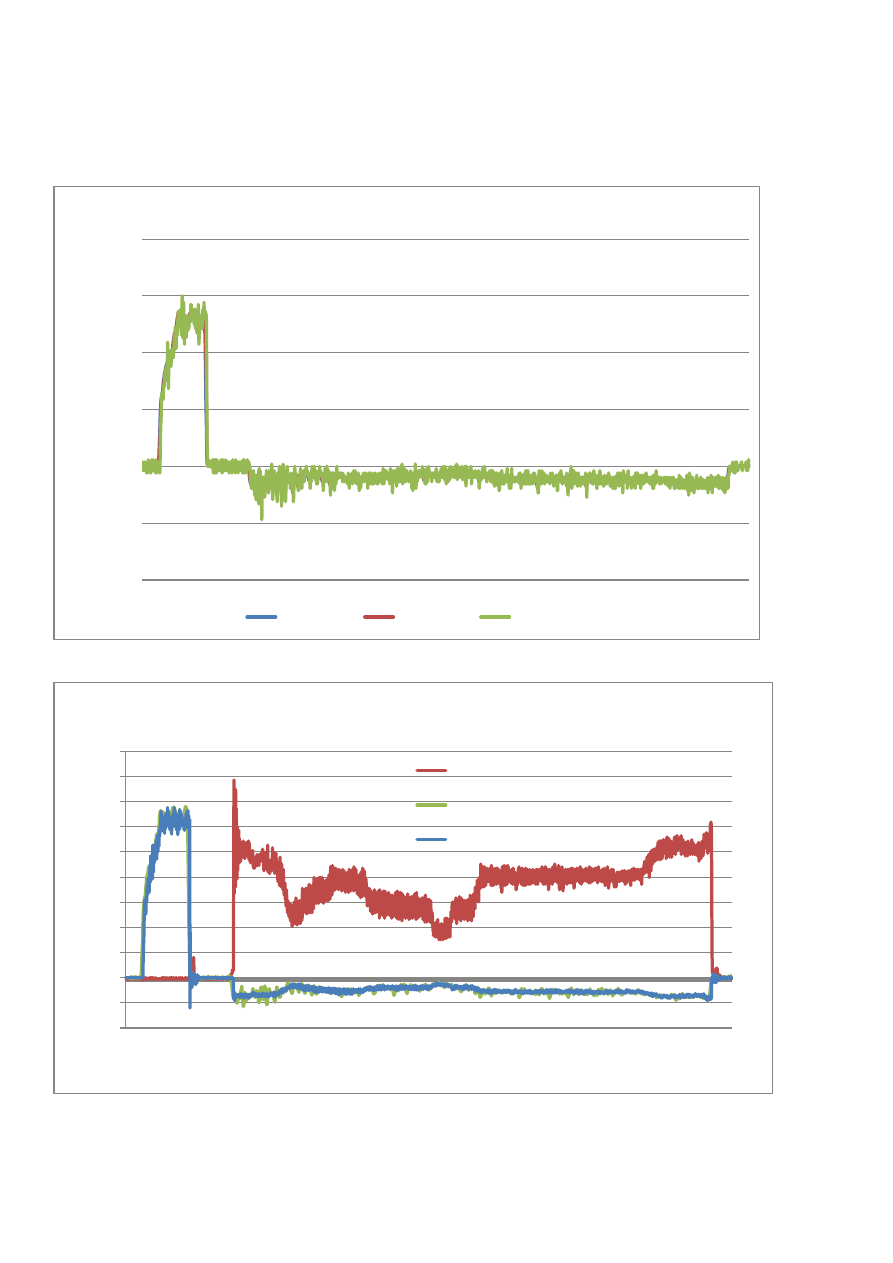
Na przemieszczeniu (z czujnika linkowego optoelektrycznego) wykonaliśmy operację różniczkowania w
trzech zakresach po 5, 10 i 15
punktów pomiarowych:
Zestawienie wyników w postaci funkcji prędkości od czasu:
-0,100000
-0,050000
0,000000
0,050000
0,100000
0,150000
0,200000
0
29
,9
1201
9
30
,8
0201
9
31
,6
92
01
9
32
,5
8201
9
33
,4
7201
9
34
,3
6201
9
35
,2
5201
9
36
,1
4201
9
37
,0
3201
9
37
,9
2201
9
38
,8
1201
9
39
,7
0201
9
40
,5
9201
9
41
,4
8201
9
42
,3
7201
9
43
,2
6201
9
44
,1
5201
9
45
,0
42
01
9
45
,9
3201
9
46
,8
2201
9
47
,7
1201
9
48
,6
0201
9
49
,4
9201
9
50
,3
8201
9
51
,2
7201
9
52
,1
6201
9
53
,0
5201
9
53
,9
4201
9
54
,8
3201
9
55
,7
2201
9
56
,6
1201
9
57
,5
0201
9
V(t) - co 15
v(t) - co 10
V(t) - co 5
-0,04
-0,02
0,00
0,02
0,04
0,06
0,08
0,10
0,12
0,14
0,16
0,18
0
29
,9
1201
9
30
,8
0201
9
31
,6
9201
9
32
,5
8201
9
33
,4
7201
9
34
,3
6201
9
35
,2
5201
9
36
,1
4201
9
37
,0
3201
9
37
,9
2201
9
38
,8
1201
9
39
,7
0201
9
40
,5
9201
9
41
,4
8201
9
42
,3
7201
9
43
,2
6201
9
44
,1
5201
9
45
,0
4201
9
45
,9
3201
9
46
,8
2201
9
47
,7
1201
9
48
,6
0201
9
49
,4
9201
9
50
,3
8201
9
51
,2
72
01
9
52
,1
62
01
9
53
,0
5201
9
53
,9
4201
9
54
,8
3201
9
55
,7
2201
9
56
,6
1201
9
57
,5
0201
9
link + enkoder
link+ opto
pradnica
Za zadanie mieliśmy również wyznaczyć średnie prędkości z pomiarów poszczególnymi metodami
oraz
rozrzut wyników pomiarów:
Linkowy z
enkoderem
Linkowy
optoelektryczny
Pradnica
tachometryczna
V srednia
0,0608
0,01751
0,01699
rozrzut
0,034865373
0,028656
0,027843
5. Wnioski
Ćwiczenie miało na celu zaprezentowanie trzech różnych metod pomiaru prędkości liniowej. Dwie z
nich (powszechnie stosowane): czujnikiem linkowym z enkoderem
oraz prądnicą tachometryczną dają
wyniki proporcjonalne do mierzonej prędkości, więc ich użycie jest proste oraz wygodne w zastosowaniu.
Czujnik z enkoderem charakteryzuje się nieco spokojniejszym przebiegiem sygnału niż prądnica. Mają one
jednak
pewną wadę w stosunku do mniej wymagających pomiarów - ich cena jest wysoka, co nie jest
zbytnio pożądane, a wręcz stanowi barierę w prostych, mniej zaawansowanych pomiarach. Do tych z kolei
znakomicie nadaje się podejście do problemu z innej strony. Zmierzenie przemieszczenia umożliwia nam
poprzez zróżniczkowanie drogi po czasie uzyskać szukaną wartość prędkości. Czujnik linkowy
optoelektryczny jest dużo tańszym narzędziem od typowych czujników prędkości, a jak pokazuje nasze
doświadczenie, przy prostych pomiarach, nie odstaje od reszty pod względem jakości wykonanego
pomiaru. W zależności od doboru zakresu różniczkowania otrzymujemy: gładszy wykres im większy
zakres; bardziej
’poszarpany’, lecz dokładniejszy im zakres mniejszy.
Trudność w utrzymaniu liniowej prędkości tłoka przy sterowaniu siłownikiem mogła spowodować
niedokładność przy wyznaczaniu współczynników skali. Widać jednak, że każdy z przebiegów jest bardzo
podobny. Brak jest jakichkolwiek opóźnień w reakcji czy też rozbieżności wyników pomiaru.
Do
bierając czujnik do danego pomiaru mamy więc szeroką gamę metod do wyboru. Zwracając
uwagę na zakres pomiarowy, maksymalną prędkość pomiaru, oraz dokładność – łatwo możemy dobrać
odpowiedni przyrząd według naszych wymagań. Dla dokładnych, zaawansowanych pomiarów znakomity
będzie czujnik linkowy z en koderem - ze względu na gabaryty oraz parametry. Natomiast brak
konieczności zamocowania linki skupia uwagę na prądnicy tachometrycznej, której właściwości nie różnią
się od konkurenta. Wspaniałą alternatywą dla kosztownych czujników jest przetwornik linkowy z układem
optoelektrycznym. Mimo bardziej skomplikowanej operacji, niż przeskalowanie, koniecznej do wykonania
na otrzymanych wartościach jest on poważnym konkurentem, nie zostającym w tyle z dokładnością
pomiaru.
Wyszukiwarka
Podobne podstrony:
Badanie właściwości przetworników prędkości liniowej
Pocisk o masie m i predkosci liniowej v0 trafia w cylinder
predkosc liniowa
MC Pomiar prędkości liniowej
Prędkość liniowa
Prędkość liniowa zajebista, Mechanika i Budowa Maszyn PK, Miernictwo cieplne i maszynowe
Obliczanie przełożenia, prędkości liniowej dla piły tarczowej
MC Pomiar prędkości liniowej
Obliczanie przełożenia, prędkości liniowej dla piły tarczowej
1 2 Prędkość fali akustycznej w różnych ośrodkach
Algebra liniowa i geometria kolokwia AGH 2012 13
Charakterystyka sprzęgła hydrokinetycznego przy stałej prędkości
Opracowanie Programowanie liniowe metoda sympleks
BO WYK2 Program liniowe optymalizacja
Niejednorodne liniowe rownania rozniczkowe
więcej podobnych podstron