
Politechnika Białostocka
Wydział Elektryczny
Katedra Automatyki i Elektroniki
Instrukcja
do
ć
wicze
ń
laboratoryjnych z przedmiotu
ELEKTRONIKA ENS1C300 022
STABILIZATOR IMPULSOWY OBNI
Ż
AJ
Ą
CY NAPI
Ę
CIE
BIAŁYSTOK 2013
STABILIZATOR IMPULSOWY
1. Wstęp
Wobec
pogłębiającego
się
deficytu
energii
powstaje
konieczność
oszczędnego
gospodarowania nią, zwłaszcza najszlachetniejszym jej rodzajem – energią elektryczną.
Urządzenia elektroniczne muszą być zasilane stabilizowanymi napięciami stałymi. Dobrym
rozwiązaniem, szczególnie przy dużych mocach wyjściowych, są stabilizatory impulsowe.
Wysoka sprawność, stabilne napięcie wyjściowe, niezależne od napięcia zasilającego i
temperatury otoczenia sprawiają, że są niemal idealnym źródłem prądu stałego. Może on być
częścią większego urządzenia elektronicznego, ale zazwyczaj jest oddzielnym modułem,
wykonanym zwykle jako układ scalony. Najczęstsze zastosowania to zasilacze sprzętu
komputerowego, elektroniki użytkowej, sprzętu telekomunikacyjnego i medycznego,
aparatury pokładowej samolotów oraz sprzętu kosmicznego.
2. Wprowadzenie
Jednym z najistotniejszych podzespołów stabilizatorów impulsowych są układy
przekazywania energii (stopnie wyjściowe mocy). W ich skład wchodzą elementy
przełączające, które umożliwiają przepływ energii pomiędzy wejściem, a wyjściem
stabilizatora. Impulsowy układ przekazywania energii może być z wyjściem odizolowanym
lub nieodizolowanym od sieci.
W przekształtniku o działaniu impulsowym (rys. 1) tranzystor regulacyjny pracuje
jako łącznik doprowadzający napięcie do obciążenia za pośrednictwem filtru indukcyjno-
pojemnościowego, którego zadaniem jest wygładzenie napięcia wyjściowego, związanego z
pracą impulsową. Dławik magazynuje energię w jednej fazie cyklu, aby w drugiej oddać
energię, zastępując źródło zasilające, a tym samym stabilizować napięcie. Dioda zwrotna
umożliwia przepływ energii tylko w jednym kierunku, a jej umiejscowienie i polaryzacja
zależy od rodzaju konwertera.
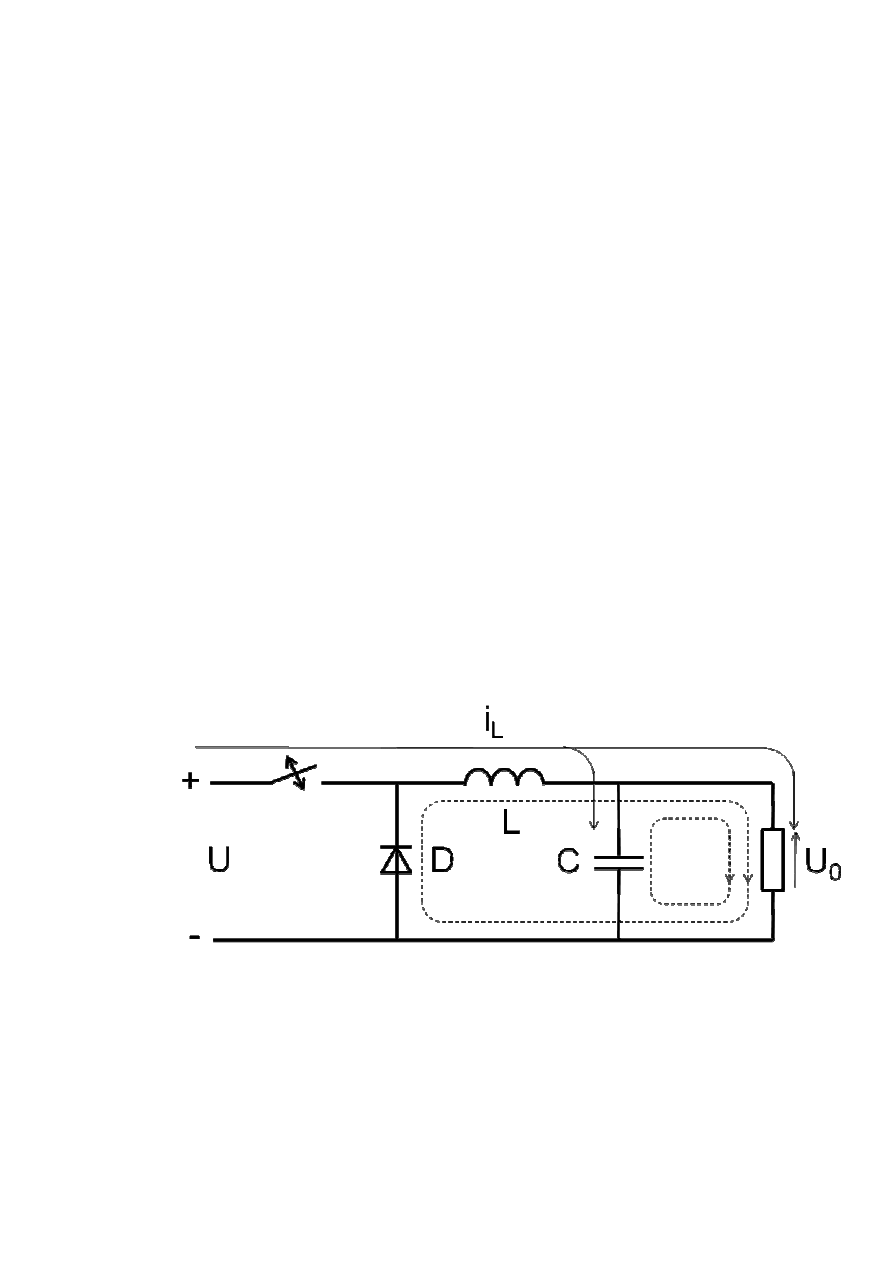
Rys. 1. Schemat ideowy impulsowego stabilizatora obniżającego napięcie wejściowe
W czasie przewodzenia łącznika prąd przepływa przez dławik i obciążenie, ładując
jednocześnie kondensator (linia ciągła na rys. 1). Po wyłączeniu łącznika prąd przepływający
przez dławik nie może zmienić się skokowo, kontynuując przepływ przez obciążenie i diodę
zwrotną. W tym czasie prąd rozładowania kondensatora zasila obciążenie (linia przerywana
na rys. 1).
W większości układów stabilizator impulsowy jest sterowany z generatora impulsów
prostokątnych o modulowanej szerokości impulsów (PWM). Wartość napięcia wyjściowego
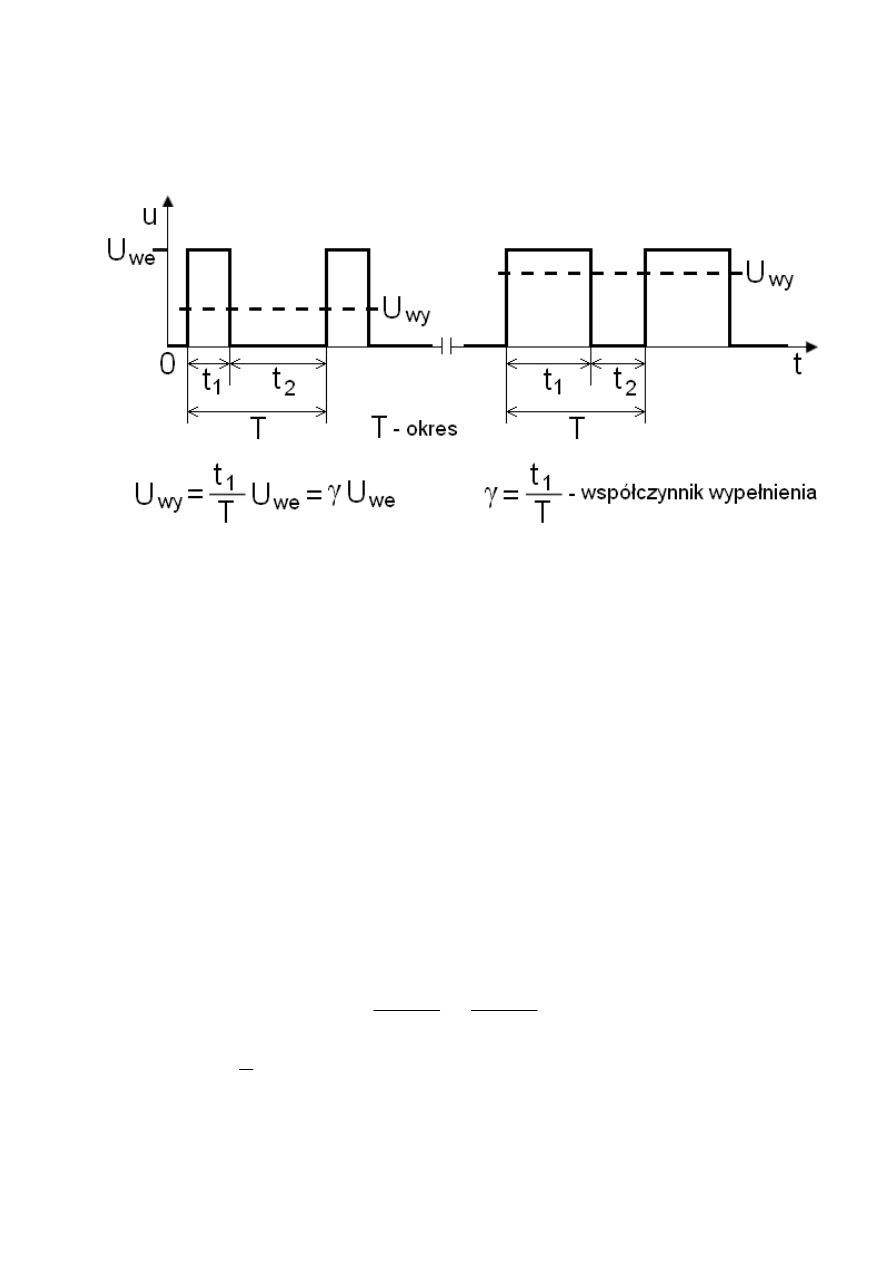
stabilizatora może być regulowana poprzez zmianę współczynnika wypełnienia impulsów,
przy stałej częstotliwości przełączania (rys. 2).
Rys. 2. Kształtowanie napięcia wyjściowego poprzez modulację szerokości impulsu
Układy przekazywania energii o wyjściu nieizolowanym od wejścia dzielą się na:
obniżające napięcie (ang. step - down, bucking), podwyższające napięcie (ang. step – up,
boost) oraz zmieniające biegunowość napięcia stałego (ang. polarity-converting).
Tematyką ćwiczenia jest badanie regulowanego stabilizatora obniżającego napięcie
wejściowe sterowanego monolitycznym układem scalonym LM 2576. W odróżnieniu od
układów dyskretnych, zasadniczy ciężar pracy projektowej spoczywa na konstruktorach
układu scalonego. Zadanie użytkownika sprowadza się na ogół do umiejętnego i
całościowego wykorzystania danych zawartych w katalogu.
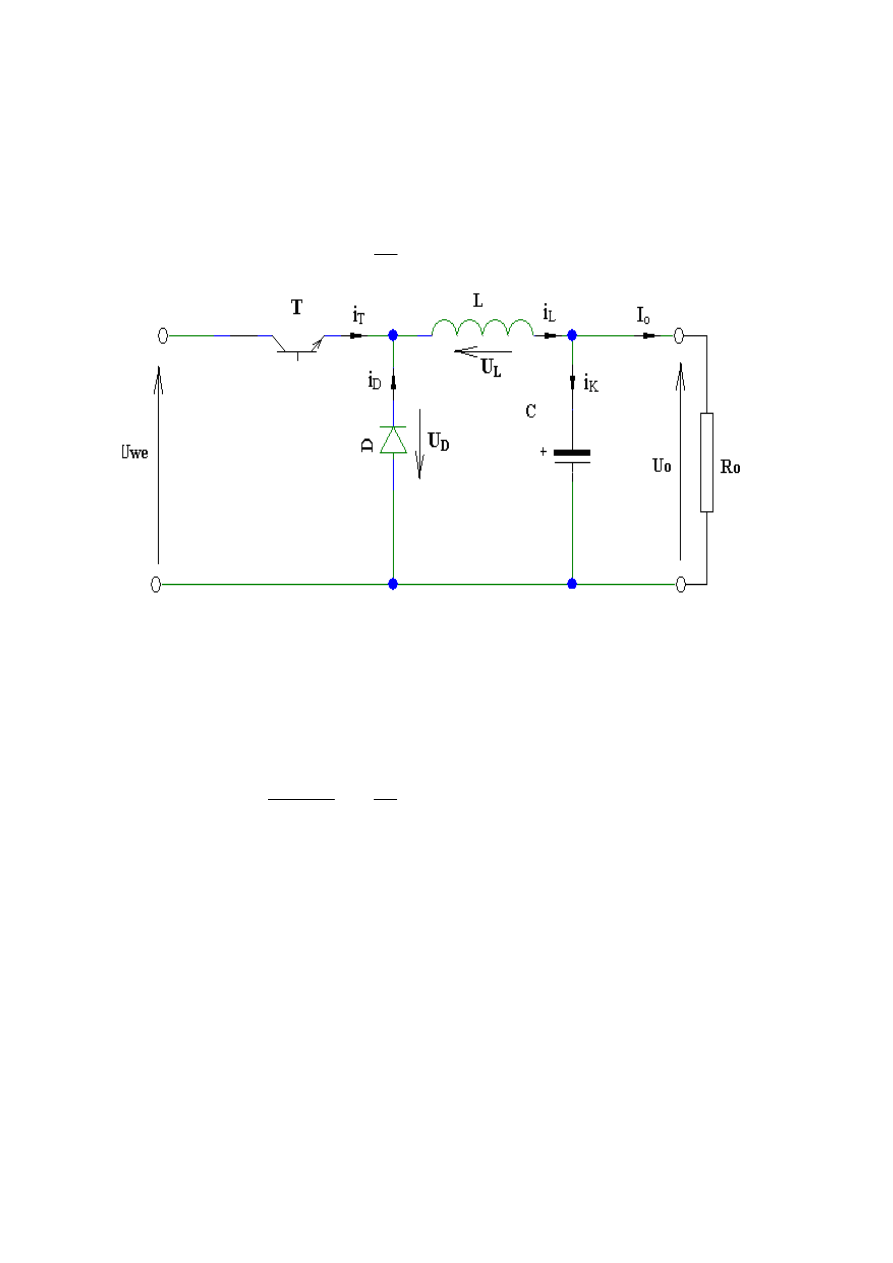
3. Stabilizator obniżający napięcie
W układzie stabilizatora impulsowego obniżającego napięcie (rys. 3) tranzystor T pracuje
jako łącznik. Kondensator C włączony równolegle do obciążenia R
o
jest ładowany impulsowo
poprzez dławik L. W czasie, gdy tranzystor T jest załączony, kondensator C ładowany jest
prądem przepływającym przez dławik o indukcyjności L.
W czasie załączenia tranzystora t
1
przyrost prądu w dławiku wynosi:
T
L
U
U
t
L
U
U
I
o
we
o
we
Lt
γ
−
=
−
=
∆
1
1
,
(1)
gdzie:
T
t
1
=
γ
jest współczynnikiem wypełnienia.
Gdy tranzystor zostanie wyłączony (zatkany), zgromadzona w indukcyjności energia nie
pozwala na skokową zmianę prądu, który w przedziale t
2
zamyka się poprzez pojemność C i
diodę zwrotną. W tym czasie prąd w dławiku maleje liniowo zgodnie z zależnością (2):
).
1
(
2
γ
−
=
∆
T
L
U
I
o
Lt
(2)
Rys. 3. Schemat stabilizatora impulsowego obniżającego napięcie
Stabilizacja napięcia wyjściowego zachodzi wtedy, gdy przyrost i spadek prądu dławika
podczas czasu załączenia i wyłączenia klucza są sobie równe, czyli:
)
1
(
γ
γ
−
=
−
T
L
U
T
L
U
U
o
o
we
(3)
Wyznaczając z zależności (80)
U
o
otrzymujemy
:
we
o
U
U
γ
=
.
(4)
Z powyższej zależności widać, iż napięcie wyjściowe może być stabilizowane poprzez
zmianę współczynnika wypełnienia. Ponieważ jest on zawsze mniejszy od jedności (
1
<
γ
),
zatem napięcie wyjściowe będzie zawsze niższe od napięcia wejściowego.
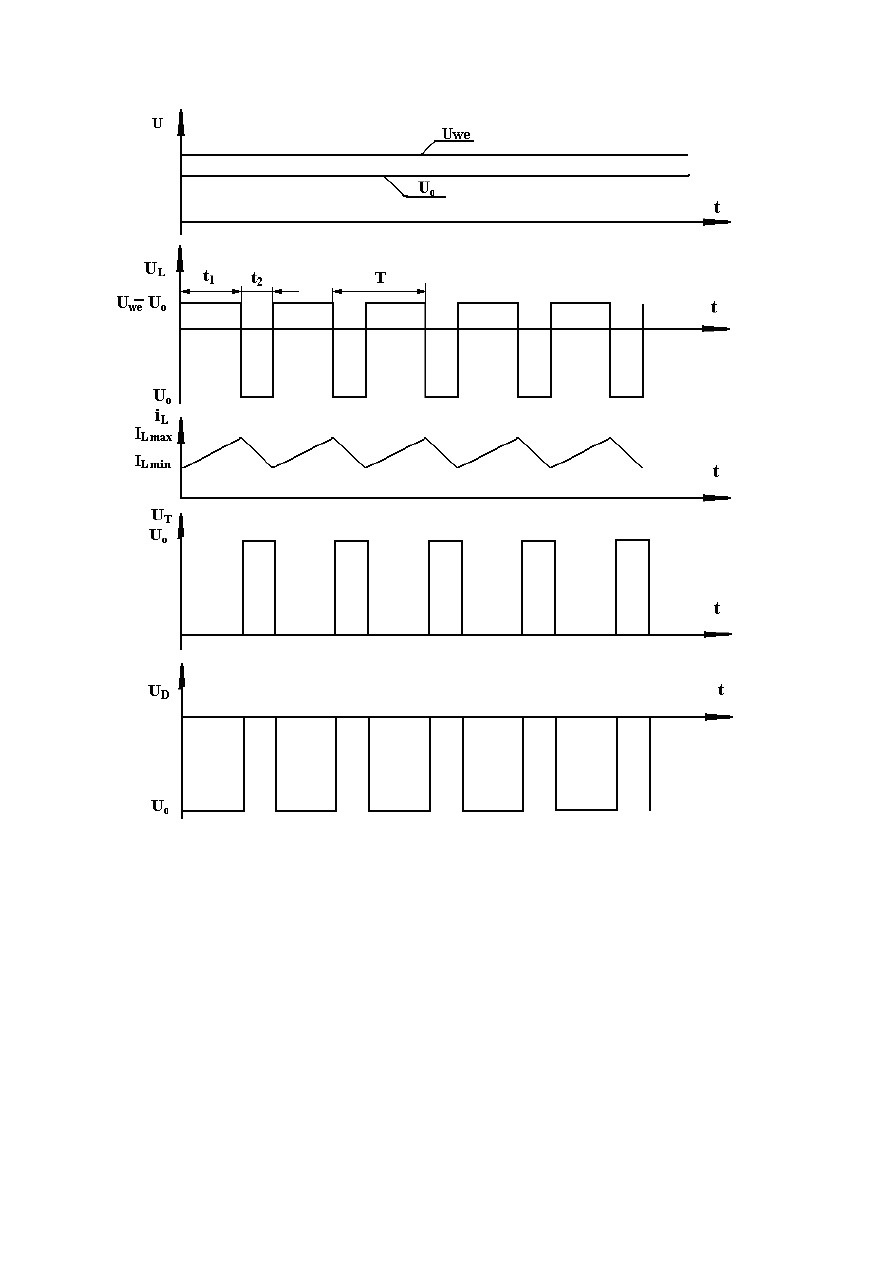
Rys. 4. Przebiegi napięć i prądów stabilizatora obniżającego napięcie
Dla wyjścia indukcyjność L wraz z pojemnością stanowią filtr dolnoprzepustowy,
jednocześnie dławik jest elementem, który ogranicza prąd. Ponieważ w indukcyjności jest
możliwe jednoczesne gromadzenie jak i odzysk energii wówczas w chwili, gdy klucz jest
wyłączony (tranzystor zatkany), wtedy zaczyna przewodzić dioda zwrotna przekazując
energię nagromadzoną w dławiku do kondensatora i obciążenia. W rezultacie poprawia się
sprawność układu.
Krytyczna wartość indukcyjności dławika jest określana dla podwójnej wartości średniej
minimalnego prądu obciążenia, co można zapisać zależnością:
o
o
I
L
T
U
2
)
1
(
=
−
γ
(5)
Podstawiając w miejsce γ wyrażenie
U
o
/U
we ,
oraz do
I
o
zależność
P
o
/U
o
otrzymujemy wzór na
minimalną wartość indukcyjności:
)
1
(
2
max
min
2
min
we
o
o
o
U
U
P
T
U
L
−
⋅
⋅
⋅
=
,
(6)
gdzie:
P
o min
– minimalna moc wyjściowa.
Dla zadanej indukcyjności można obliczyć wartość graniczną prądu obciążenia, czyli taką,
przy której chwilowa wartość prądu dławika chwilowo spada do zera. Można to wyrazić
zależnością:
L
TU
I
we
Lim
2
)
1
(
γ
−
=
.
(7)
Gdy prąd obciążenia jest większy od tej wartości, wtedy prąd dławika nie spada do zera. Przy
pominięciu strat, do określenia parametrów układu ważne są poniższe zależności:
we
o
U
U
γ
=
, gdy
I
o
>
I
Lim
.
(8)
oraz
T
U
LI
U
U
we
o
we
o
2
2
1
+
=
,
gdy
Lim
o
I
I
≤
≤
0
.
(9)
4. Cel ćwiczenia
Celem ćwiczenia laboratoryjnego jest zrozumienie działania, poznanie roli elementów
składowych układu oraz właściwości regulowanych stabilizatorów impulsowych.
Studenci przed przestąpieniem do wykonywania ćwiczenia powinni zapoznać się z zakresem
napięć wejściowych i wyjściowych, prądów i możliwych konfiguracji pracy podanych w
nocie aplikacyjnej producenta układu LM2576-ADJ.
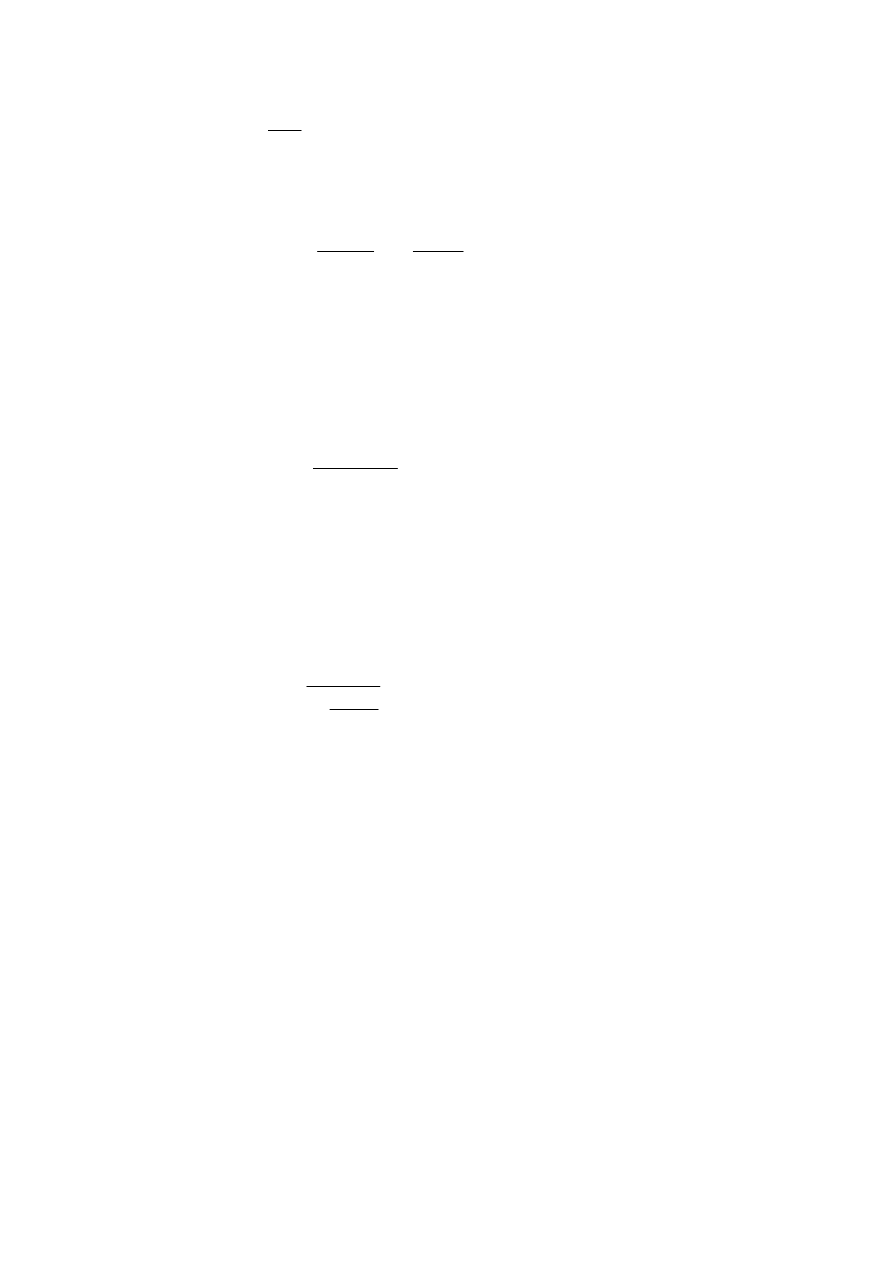
5. Opis stanowiska laboratoryjnego
Rysunek 5 przedstawia schemat ideowy stanowiska laboratoryjnego. Głównym elementem
jest scalony stabilizator impulsowy LM2576-ADJ, którego napięcie wyjściowe może być
regulowane od 5 V do 15 V. Elementami zewnętrznymi wyprowadzonymi na płytę czołową
są : kondensatory wejściowy i wyjściowy, dioda Schottky-go, dławik oraz żarówki pełniące
role obciążenia.
Rys. 5. Schemat stanowiska laboratoryjnego
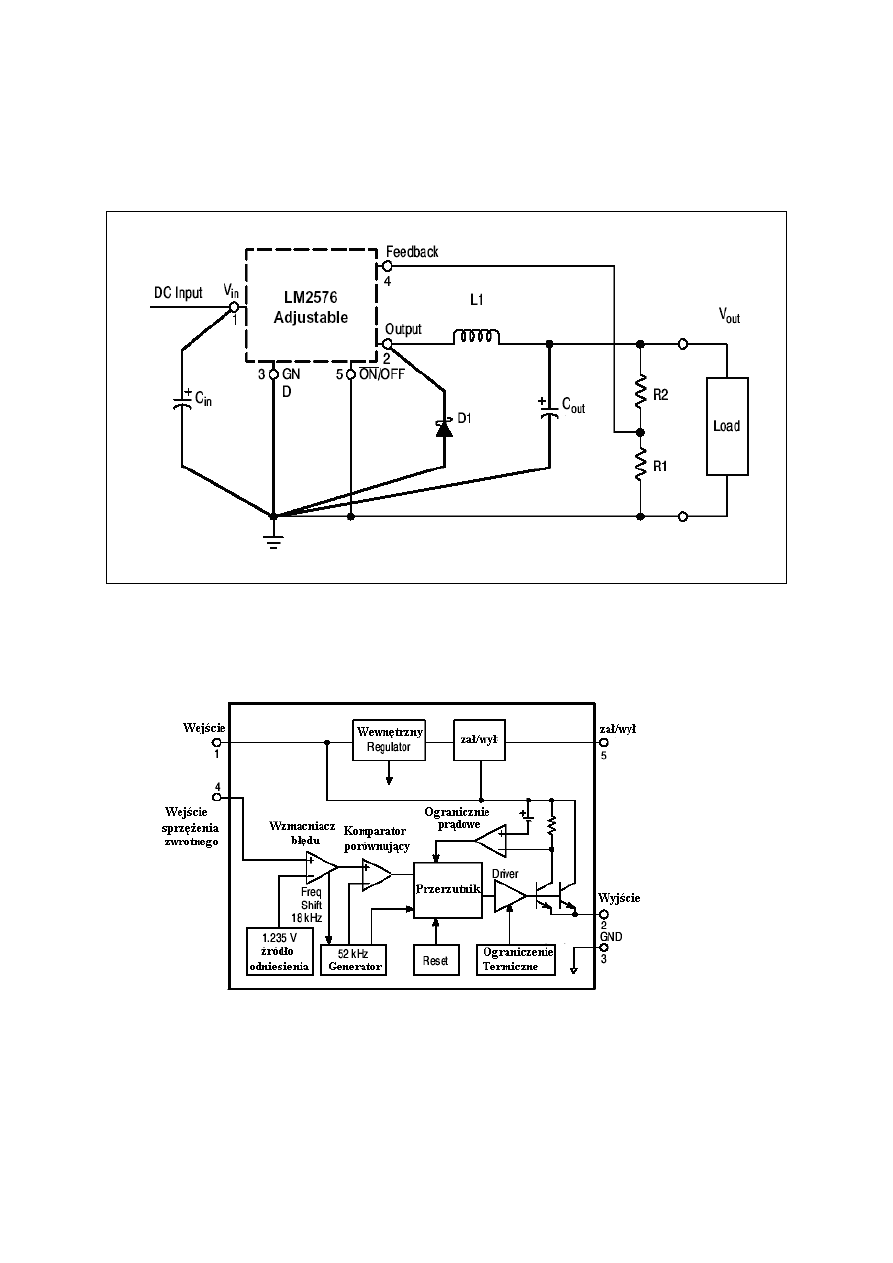
Rys. 6. Struktura wewnętrzna stabilizatora impulsowego LM2576-ADJ
6. Przygotowanie do pracy w laboratorium (część projektowa ćwiczenia)
6.1. Ustal napięcie wyjściowe stabilizatora impulsowego napięcia stałego. Jego wartość ma być
równa U
wy
= 5+0,5x [V], gdzie x jest numerem zespołu, który stanowisz w grupie laboratoryjnej.

Oblicz współczynnik wypełnienia impulsów sterujących, pozwalający uzyskać wybraną wartość
napięcia wyjściowego. Przyjmij, że wartość napięcia wejściowego stabilizatora jest równa 15V.
Wiedząc, że przerwa między impulsami sterującymi wynosi 15
µ
s oblicz czas trwania tych
impulsów.
Znając indukcyjność cewki L1=100 µH, oblicz krytyczny prąd obciążenia stabilizatora. Umieść
wyniki obliczeń w sprawozdaniu.
6.2. Narysuj przebiegi prądów w cewce L1, tranzystorze regulacyjnym i diodzie D1 dla
obciążenia krytycznego oraz wybranych wartości pod- i nadkrytycznego prądu obciążenia.
6.3. Zaprojektuj schemat blokowy układu pomiarowego, umożliwiający badanie podstawowych
parametrów zasilacza (napięcie wyjściowe, charakterystyka wyjściowa, sprawność itd.).
6.4. Określić teoretyczną sprawność energetyczną impulsowego układu obniżającego napięcie
i porównać ją ze sprawnością stabilizatora ciągłego.
7. Praca w laboratorium (część doświadczalna ćwiczenia)
7.1. Badanie stabilizatora impulsowego
•
Dokonaj obserwacji oscyloskopowych i zarejestruj wybrane przebiegi
stabilizatora impulsowego używając sond napięciowych i prądowych.
Obserwując kształt prądu tranzystora, cewki lub diody, określ prąd
krytyczny
stabilizatora.
Zanotuj
wynik,
zarejestruj
oscylogramy
wspomnianych prądów dla tego oraz kilku różnych prądów obciążenia (w
tym dla obciążenia prądem maksymalnym).
•
Ustaw prąd obciążenia nieznacznie większy od prądu krytycznego. Zmierz
napięcie wejściowe i wyjściowe. Wyjaśnij ewentualne rozbieżności
otrzymanych wyników z wcześniej wykonanymi obliczeniami. Wyjaśnij
kształty narysowanych przebiegów i przyczyny zmian przy różnych
prądach obciążenia.
•
Zmierz charakterystykę wyjściową stabilizatora w całym zakresie
możliwych do uzyskania zmian prądu obciążenia dla U
WE
=15 V. Zanotuj
wyniki, wykreśl tę charakterystykę. Wyjaśnij jej kształt.
•
Wyznacz zależność prądu krytycznego w funkcji współczynnika
wypełnienia i wartości oddawanej mocy.
•
Wyznacz sprawność stabilizatora w funkcji napięcia wejściowego i prądu
obciążenia.
•
Zaobserwuj i wyjaśnij wpływ parametrów układu na tętnienia napięcia
wyjściowego.

8. Pytania kontrolne
Narysuj schemat i omów zasadę działania stabilizatora podwyższającego,
obniżającego i odwracającego napięcie.
Narysuj przebiegi napięć i prądów tranzystora, diody, dławika i kondensatora
wyżej wymienionych przekształtników.
Co to jest prąd graniczny obciążenia?
Kiedy prąd dławika jest ciągły i nieciągły?
W jaki sposób dla układu LM2576-ADJ dobiera się zewnętrzne rezystancje w
zależności od napięcia wyjściowego?
9. Wymagania BHP
Warunkiem przystąpienia do realizacji ćwiczenia jest zapoznanie się z obowiązującą
w laboratorium instrukcją BHP oraz przestrzeganie w niej zawartych zasad.
LITERATURA
1.
J. Baranowski, G. Czajkowski ,Układy elektroniczne cz. II - Układy analogowe
nieliniowe i impulsowe. Wydawnictwa Naukowo-Techniczne, Warszawa 2004r.
2.
Ödön Ferenczi. Zasilanie układów elektronicznych, Wydawnictwa Naukowo-
Techniczne Warszawa 1989r.
3.
U. Tietze, Ch. Schenk. Układy półprzewodnikowe, Wydawnictwa Naukowo-
Techniczne Warszawa 2009r.
4.
Piotr Górecki. Przetwornica impulsowa, „Elektronika dla wszystkich”, nr 3,1999r.
Będę niezmiernie wdzięczny za wszelkie propozycje zmian przesłane na adres
dawid@pb.edu.pl
w celu udoskonalenia niniejszego opracowania.
dr hab. inż. Jakub Dawidziuk, prof. PB
Wyszukiwarka
Podobne podstrony:
stabilizatory impulsowe
elektronika stabilizatory impulsowy druk
Badanie stabilizatorów napięcia, Impulsowy stabilizator napięcia, Cel i przeznaczenie
EN w8 zasilacze impulsowe
11 stabilizowane zasilacze impulso
Elementy układów zasilania II generator, przetwornica impulsowa, szeregowy stabilizator napiecia
EN Trojkoncowkowe stabilizatory napiecia
11 Stabilizowane zasilacze impulsowe
1998 11 Impulsowy stabilizator napięcia
EN Uklady formowania impulsow
zasilacze impulsowe 2
vii w stabilnosc prionow
Biofizyka komórki II Propagacja impulsu
4 stabilnosc
Budzik Versa wielkość karty kredytowej instrukcja EN
więcej podobnych podstron