UKŁADY DYNAMICZNE
Uzasadnić wpływ wartości wymuszenia skokowego na odpowiedź układu różniczkującego rzeczywistego, podać jego tansmintancję.
Odpowiedź na wymuszenie skokowe wyznaczamy z transmintancji.
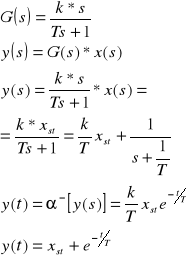
Zależność wartości wymuszenia skokowego i odpowiedzi jest liniowa , gdyż wymuszenia jest wprost proporcjonalne do odpowiedzi . Im większe wymuszenie tym większy spadek wartości odpowiedzi w jednostce czasu.
Y X
xst
y(s)
T
T
Licznik - jest to urządzenie do zliczania impulsów elektrycznych (mogą zarówno dodawać jak i odejmować w zależności od wartości sygnałów). Układem dynamicznym nazywamy dowolny układ fizyczny rozpatrywany z punktu widzenia zachodzących w nim procesów dynamicznych.(przedstawianych za pomocą liniowych równań różniczkowych zwyczajnych o stałych parametrach) Ściśle wchodzą zależności pomiędzy przebiegami czasowymi zmiennych, a nie ich wartości chwilowych.
Stan układu -jest to zbiór wielkości dostarczających taką ilość informacji, które wystarczają do oceny zachowania się obiektu w przyszłości, czyli do jednoznacznego określenia zachowania się układu.
Dynamiczny układ liniowy i stacjonarny może być opisany przez n równań różniczkowych I-go rzędu.
x(t)=Ax(t)+Bu(t)
y(t)=Cx(t)+Du(t)
Sterowalność oznacza możliwość osiągnięcia dowolnego stanu układu w skończonym czasie za pomocą dopuszczalnego sterowania.
Dopuszczalne sterowanie-jest to sterowanie ograniczone przedziałami i ciągłe.
Warunkiem koniecznym i dostatecznym sterowalności jest, aby macierz S=[B,AB,A2B,...,An-1B] o n wierszach i m kolumnach była rzędu n ,czyli aby miała n liniowo niezależnych kolumn.
Obserwowalność oznacza , że na podstawie przebiegu sygnału wyjściowego w skończonym przedziale czasu można określić stan układu w tym przedziale. Warunkiem koniecznym i dostatecznym obserwowalności jest, aby macierz
C
AC
O= A2C
C...)
AN-1C o wymiarach n*n była rzędu n , czyli zawierała n-liniowo niezależnych wierszy.
Ocena sterowalności i obserwowalności może być przeprowadzona na podstawie analizy:
postaci kanonicznej równania stanu i równania wyjścia;
bezpośredniej analizy schematu blokowego,
Układ jest stabilny ,gdyż dla stałej skończonej wartości zakłócenia i dla dowolnego stanu początkowego.
Sygnał wyjściowy będzie dążył do skończonej wartości ustalonej.
Układ jest sterowalny - jeżeli dla każdego t0 istnieje takie sterowanie x(t), które spowoduje w skończonym przedziale czasu (tk-t0) przejście układu z dowolnego stanu początkowego u(t0)=U0 do stanu końcowego u(tk)=Uk=0
Układ jest obserwowalny - w przedziale czasu t0<t<tk jeżeli na podstawie znajomości wejść (sterowań) x(t) i wektora wyjść y(t) w tym przedziale można wyznaczyć wektor stanu U0 układu w chwili t0. Warunkiem koniecznym i dostatecznym obserwowalności jest aby podany rząd macierzy był równy (n) wymiarowy wektora stanu.
Układ jest stabilny - gdy części rzeczywiste pierwiastków równania charakterystycznego są ujemne N(s)=s^2+s+1 S(1,2)= -0,5+/-j~3/2 Re(S12)=-0,5 Zamknięty układ liniowy jest stabilny, gdy dla stałej skończonej wartości zakłócenia i dla dowolnego stanu początkowego sygnał wyjściowy będzie dążył do skończonej wartości ustalonej. Lokalne - po przekroczeniu granicy x1 x2 układ się wróci do stanu poprzedniego i jest niestabilny. Będzie lokalnie jeżeli dla każdego dowolnie małego obszaru e można dobrać taki obszar r0 stanów początkowych, że cała trajektoria stanu układu x(t) dla warunków początkowych zwartych w obszarze r0 będzie zawarta także w obszarze e.
Globalnie - (o równaniu X'=Ax) wtedy i tylko wtedy gdy wszystkie wartości własne macierzy A mają niedodatnie części rzeczywiste i każda wartość własna o zerowej części rzeczywistej jest pierwiastkiem jednorodnym wielomianu. Stabilność punktu równowagi przy dowolnie dużych warunkach początkowych nazywa się globalną.
Asymptotyczna - jeżeli wektor stanu powróci do stanu równowagi.
Kryteria stabilności - analityczne (Hurwitza, Roughta) graficzne (Nequista) anal-graf (Michajłowa)
Stabilność lokalną rozumiemy stabilność tylko w punkcie równowagi bez określenia zakresu sygnałów zaburzających, po ustąpieniu których układ wraca do równowagi. Mówiąc o stabilności globalnej określamy jednocześnie obszar sygnałów zaburzających, po przejściu których układ zachowuje swój pierwotny stan równowagi. Jeżeli obszar stabilności globalnej obejmuje wszystkie możliwe sygnały wejściowe - totalna
Wartość A22 elementu macierzy A ma wpływ na tłumienie amplitudy odpowiedzi A12 na częstość oscylacji A11 zwiększa amplitudę odpowiedzi. Macierz A obrazuje wszystkie połączenia „skrośne” pomiędzy poszczególnymi zmiennymi stanami na wejściach integratorów. B,C i D wyraża połączenia typu „każdy z każdym” odpowiednich zmiennych. A-n*n - macierz procesu , stanu, stanu (układu)B-n*r - wymuszenia (wejścia, sterowania) C-m*n - odpowiedzi (wyjścia) D-m*r - transmisyjna u(t) - wektor wymuszenia , x(t) - wektora stanu x(t) y(t) - wektor odpowiedzi.
Wyszukiwarka
Podobne podstrony:
Wpływ wartości wypiekowej mąki piekarskiej na właściwości pieczywa 16
Badanie stabilizatorów napięcia, SCIAGAII, Układy stabilizacyjne
wpływ dodatku przetworow zbozowych na technologiczno zwyeiniową wartość potraw 15
Ściąga układy elektroniczne I
sciaga z układy cyfrowe
Dynamika ściąga, MECHANIKA (DYNAMIKA)
L5 Badanie stabilności liniowego układu 3 rzędu z opóźnieniem Wpływ wartości opóźnienia na stabilno
rysunki ściaga uklady 1
Ściąga układy elektroniczne I
układy dynamiki, Badanie podstawowych członów dynamicznych
ŚCIĄGA~1, Stan nieustalony w ga˙˙zi szeregowej R, L, C przy wymuszeniu sta˙ym
Wpływ wartości wypiekowej mąki piekarskiej na właściwości pieczywa 16
Chaotyczne Liniowe Uklady Dynamiczne 05 Banasiak p29
Wpływ impedancji źródła zasilania na przebieg czasowy i wartość napięcia wyprostowanego w prostownik
04 ALEKSY AWDIEJEW, Wartościowanie wymuszone a szacunek dla odbiorcy w dyskursie politycznym
uklady dynamiczne egzamin2
Małgorzata Jóźwik, Katarzyna Kiraga Wpływ wartości kreowanych przez reklamy na zachowania dzieci
więcej podobnych podstron