Analiza matematyczna 2, cze
,
´s´
c dwunasta
Tekst poprawiony 4 wrze´snia 2011, godz. 00:02
Zwyk la pro´sba: prosze
,
o informacje
,
o zauwa˙zonych b le
,
dach, poprawie
,
.
Zajmiemy sie
,
teraz okre´sleniem miary na rozmaito´sci M ⊆ IR
k
. Rozpoczniemy od przyk ladu
wskazuja
,
cego na pewna
,
trudno´s´c.
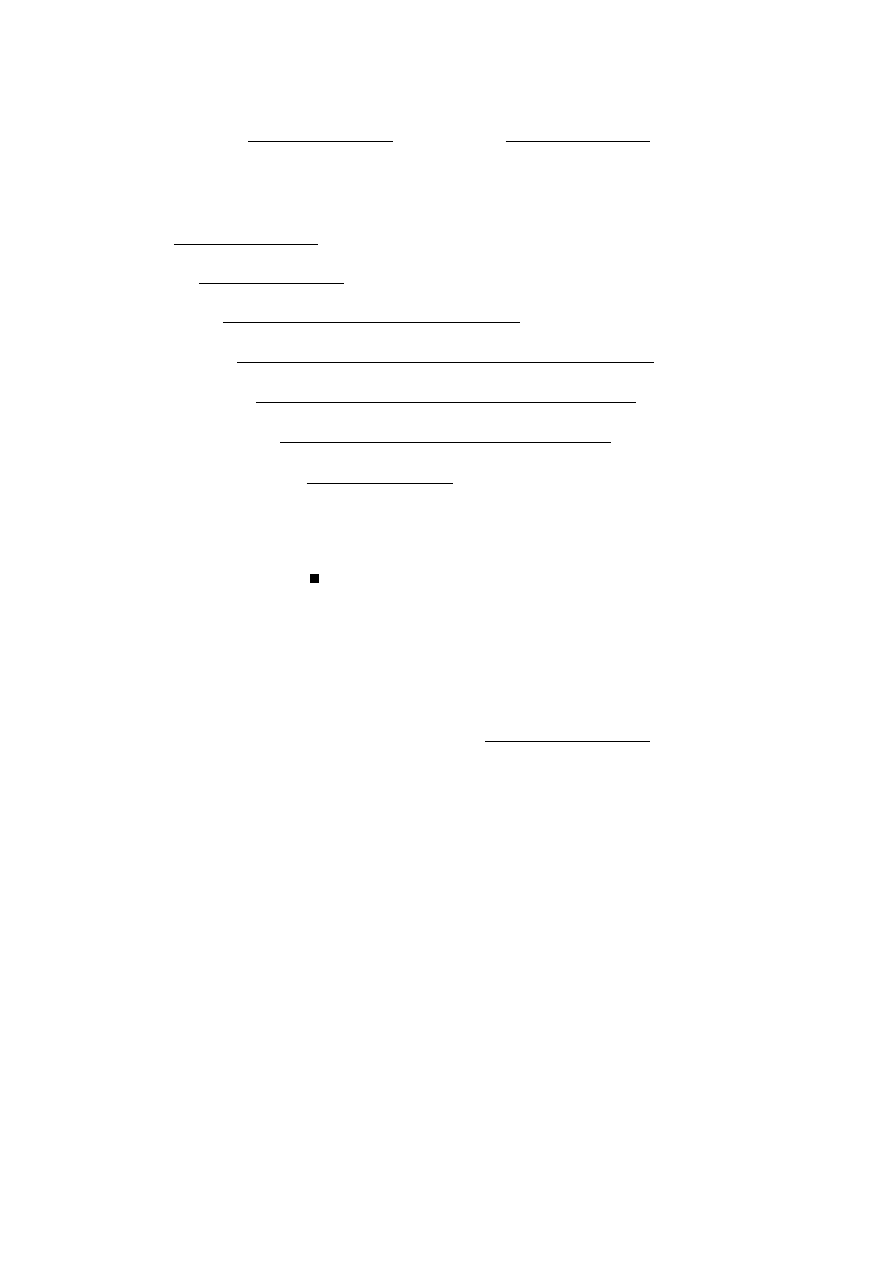
Przyk lad Schwarza
Niech W oznacza walec o wysoko´sci 1 i kt´orego podstawa ma promie´
n 1. Wyka˙zemy, ˙ze w po-
wierzchnie
,
boczna
,
tego walec mo˙zna wpisa´c wielo´scian, kt´ory ma dowolnie du˙za
,
powierzchnie
,
i
kt´orego wszystkie krawe
,
dzie sa
,
kr´otkie. ´
Scianami tego wielo´scianu be
,
da
,
tr´ojka
,
ty r´ownoramienne,
wie
,
c pole be
,
dziemy w stanie znale´z´c bez k lopotu. Podzielimy walec p laszczyznami r´ownoleg lymi
do podstaw na n przystaja
,
cych walc´ow (czyli prowadzimy n − 1 p laszczyzn). Mamy wie
,
c n + 1
okre
,
g´ow. W ka˙zdy z nich wpisujemy m –ka
,
t foremny w ten spos´ob, ˙ze wierzcho lki wieloka
,
ta wpi-
sanego w j + 1 –wszy (licza
,
c od do lu) okra
,
g znajduja
,
sie
,
nad ´srodkami luk´ow j –tego okre
,
gu wy-
znaczonych przez sa
,
siednie wierzcho lki wieloka
,
ta wpisanego w j –ty okra
,
g. Mamy wie
,
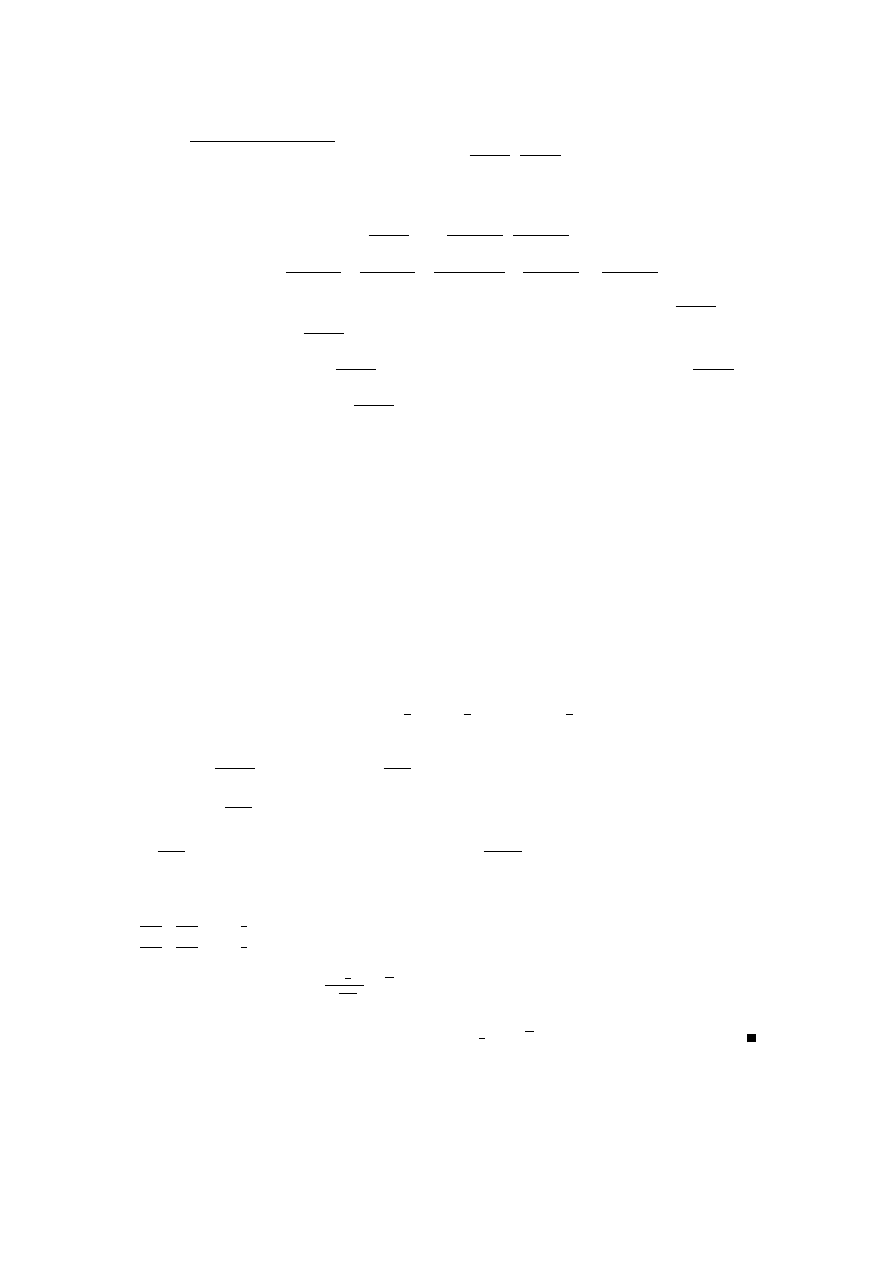
c m(n + 1)
punkt´ow na powierzchni bocznej walca. Rozwa˙zamy powierzchnie
,
be
,
da
,
ca
,
suma
,
tr´ojka
,
t´ow, kt´orych
dwoma wierzcho lkami sa
,
sa
,
siednie punkty jednego okre
,
gu, a trzecim wierzcho lek znajduja
,
cy sie
,
na sa
,
siednim okre
,
gu nad lub pod ´srodkiem luku wyznaczonego przez dwa pierwsze. Otrzymujemy
wie
,
c 2m tr´ojka
,
t´ow „mie
,
dzy” sa
,
siednimi okre
,
gami, w sumie 2mn tr´ojka
,
t´ow. Pole jednego takiego
tr´ojka
,
ta r´owne jest sin
π
m
q
1
n
2
+ (1 − cos
π
m
)
2
, zatem pole P
m,n
powierzchni ca lkowitej wielo´scianu
r´owne jest 2msin
π
m
q
1 + 4n
2
sin
4 π
m
. Przyja
,
wszy n = m otrzymujemy
P
m,n
= 2msin
π
m
q
1 + 4m
2
sin
4 π
m
−−−−−→
m→∞
2π ,
jest to rezultat zgodny z oczekiwaniami: pole wielo´scianu kt´orego wszystkie krawe
,
dzie sa
,
bardzo
kr´otkie i kt´orego wierzcho lki le˙za
,
na powierzchni bocznej walca w miare
,
ge
,
sto przybli˙za pole po-
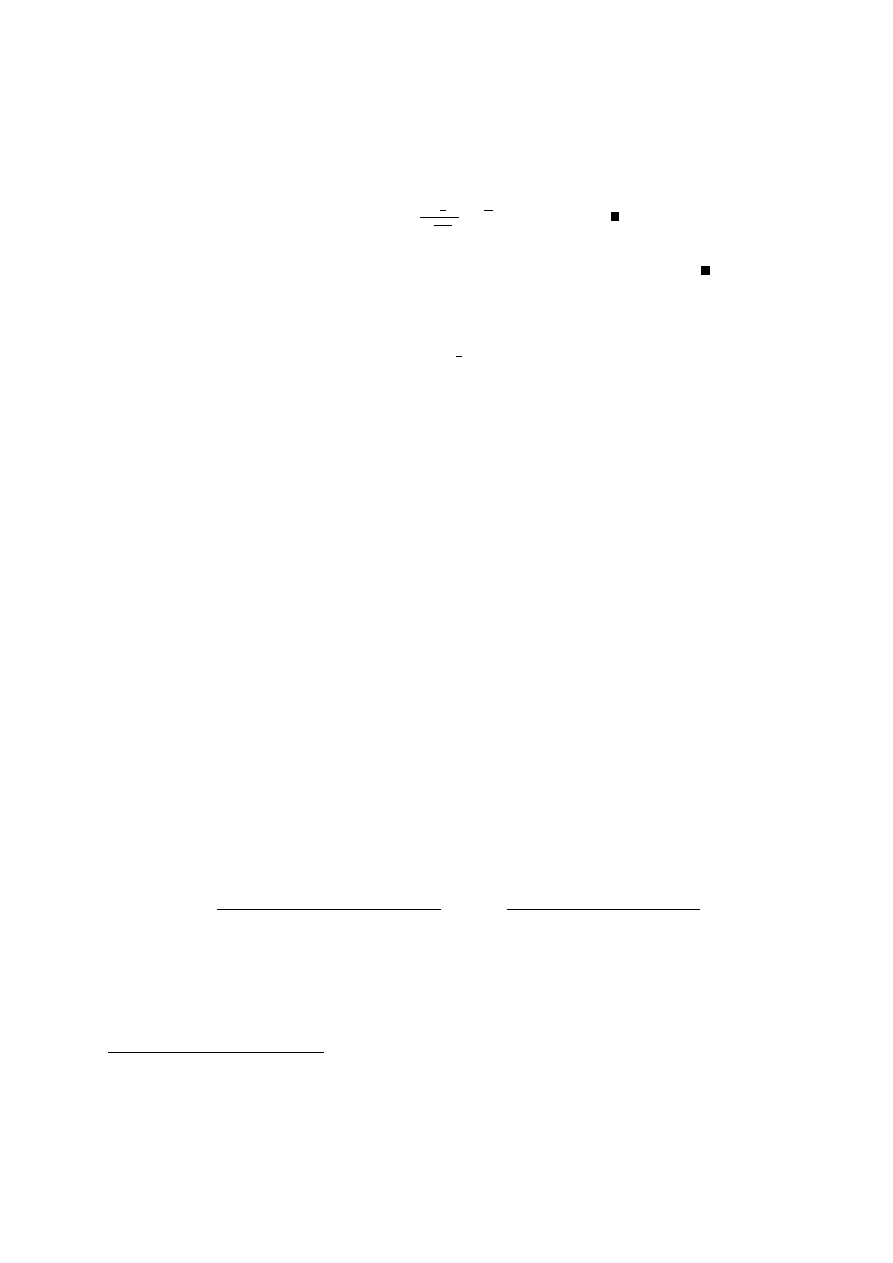
wierzchni bocznej walca. Przyjmijmy teraz n = m
2
. Otrzymujemy w tym przypadku
P
m,n
= 2msin
π
m
q
1 + 4m
4
sin
4 π
m
−−−−−→
m→∞
2π
p
1 + 4π
4
,
a wie
,
c „za du˙zo”. Niech n = m
3
. Teraz
P
m,n
= 2msin
π
m
q
1 + 4m
6
sin
4 π
m
−−−−−→
m→∞
+∞ .
Oznacza to, ˙ze pr´oba zdefiniowania pola powierzchni bocznej walca przez przybli˙zanie polami wielo-
´scian´ow wpisanych w te
,
powierzchnie
,
sko´
nczy sie
,
niepowodzeniem, chyba ˙ze zwie
,
kszymy wymagania
wobec nich. Przyczyna
,
tych nieco dziwacznych rezultat´ow jest to, ˙ze rozpatrywane tr´ojka
,
ty maja
,
c
wierzcho lki na powierzchni bocznej walca i kr´otkie krawe
,
dzie nie przybli˙za ly jednak powierzchni
bocznej, bo ka
,
t mie
,
dzy p laszczyzna
,
tr´ojka
,
ta i powierzchnia
,
boczna
,
nie da
,
˙zy l w drugim ani w trze-
cim przypadku do 0 (w pierwszym tak by lo). Oznacza to, ˙ze przy wprowadzaniu definicji nale˙zy
zadba´c r´ownie˙z o ten czynnik.
146
Za l´o˙zmy, ˙ze ψ : V −→ M ⊆ IR
k
jest parametryzacja
,
pewnego otwartego podzbioru U = ψ(V )
rozmaito´sci m –wymiarowej M . Zdefiniujemy najpierw miare
,
borelowska
,
na zbiorze U . Przy-
pomnijmy, ˙ze wyznacznikiem Grama wektor´ow v
1
, v
2
, . . . , v
m
nazywamy wyznacznik macierzy
(v
i
v
j
)
1≤i,j≤m
. Pe lni on role
,
kwadratu obje
,
to´sci m –wymiarowego r´ownoleg lo´scianu rozpie
,
tego przez
wektory v
1
, v
2
, . . . , v
m
. Je´sli jest on r´owny 0 , to wektory sa
,
liniowo zale˙zne, co jest zgodne z intui-
cyjnym pojmowaniem obje
,
to´sci.
Zdefiniujmy g(v
1
, v
2
, . . . , v
m
, w
1
, w
2
, . . . , w
m
) = det(v
i
· w
j
)
1≤i,j≤m
dla dowolnych wektor´ow
v
1
, . . . , v
m
, w
1
, . . . , w
m
∈ IR
k
. Mamy wie
,
c g(v
1
, v
2
, . . . , v
m
, v
1
, v
2
, . . . , v
m
) = G(v
1
, v
2
, . . . , v
m
) .
Jasne jest, ˙ze funkcja g jest 2m –liniowa na (IR
k
)
2m
przy czym jest ona antysymetryczna jako
funkcja wektor´ow v
1
, v
2
, . . . , v
m
przy ustalonych wektorach w
1
, w
2
, . . . , w
m
. Jest te˙z antysyme-
tryczna przy ustalonych wektorach v
1
, v
2
, . . . , v
m
jako funkcja wektor´ow w
1
, w
2
, . . . , w
m
. Mamy
g(v
1
, v
2
, . . . , v
m
+ tv
1
, v
1
, v
2
, . . . , v
m
+ tv
1
) = g(v
1
, v
2
, . . . , v
m
, v
1
, v
2
, . . . , v
m
) +
+ g(v
1
, v
2
, . . . , tv
1
, v
1
, v
2
, . . . , v
m
) + g(v
1
, v
2
, . . . , v
m
, v
1
, v
2
, . . . , tv
1
) +
+ g(v
1
, v
2
, . . . , tv
1
, v
1
, v
2
, . . . , tv
1
) =
= g(v
1
, v
2
, . . . , v
m
, v
1
, v
2
, . . . , v
m
) + 0 + 0 + 0 = G(v
1
, v
2
, . . . , v
m
) ,
bo wyznacznik macierzy zawieraja
,
cej proporcjonalne wiersze jest r´owny 0 . Oczywi´scie wektor v
1
mo˙zna zasta
,
pi´c dowolnym z wektor´ow v
2
, . . . , v
m−1
. W rezultacie: warto´s´c wyznacznika Grama
uk ladu wektor´ow v
1
, v
2
, . . . , v
m
nie zmienia sie
,
w wyniku dodania do wektora v
m
dowolnej kombi-
nacji liniowej wektor´ow v
1
, v
2
, . . . , v
m−1
. Mo˙zna wie
,
c odja
,
´c od v
m
rzut tego wektora na podprze-
strze´
n rozpie
,
ta
,
przez wektory v
1
, v
2
, . . . , v
m−1
zachowuja
,
c warto´s´c wyznacznika Grama. Z definicji
wynika natychmiast, ˙ze je´sli v
i
⊥ v
m
dla i = 1, 2, . . . , m − 1 , to zachodzi G(v
1
, v
2
, . . . , v
m
) =
G(v
1
, v
2
, . . . , v
m−1
)kv
m
k
2
. To ˙zywo przypomina dosy´c znany wz´or na obje
,
to´s´c r´ownoleg lo´scianu:
obje
,
to´s´c r´ownoleg lo´scianu to iloczyn pola podstawy i wysoko´sci. Druga mi la okoliczno´s´c to nie-
zmienniczo´s´c wyznacznika Grama przy izometriach: je´sli L: IR
k
−→ IR
k
jest izometria
,
liniowa
,
, to
G(v
1
, v
2
, . . . , v
m
) = G(Lv
1
, Lv
2
, . . . , Lv
m
) . Dla dowolnych wektor´ow v
1
, v
2
, . . . , v
m
∈ IR
k
istnieje
izometria liniowa L: IR
k
−→ IR
k
taka, ˙ze Lv
1
, Lv
2
, . . . , Lv
m
∈ IR
m
× {0, . . . , 0
| {z }
k−m
} . Dla wektor´ow
v
1
, v
2
, . . . , v
m
∈ IR
m
wyznacznik Grama G(v
1
, v
2
, . . . , v
m
) jest r´owny kwadratowi wyznacznika
macierzy, kt´orej kolumnami sa
,
wektory v
1
, v
2
, . . . , v
m
, czyli kwadratowi miary Lebesgue’a `
m
r´ownoleg lo´scianu rozpie
,
tego przez te wektory. Rozsa
,
dnie jest wie
,
c przyja
,
´c, ˙ze G(v
1
, v
2
, . . . , v
m
)
jest kwadratem miary r´ownoleg lo´scianu rozpie
,
tego przez wektory v
1
, v
2
, . . . , v
m
nie tylko w tym
przypadku, ale r´ownie˙z, gdy sa
,
one po lo˙zone w przestrzeni wy˙zszego wymiaru (np. r´ownoleg lobok
w IR
3
ma jakie´s pole).
Je´sli ψ: V −→ IR
k
jest parametryzacja
,
otwartego podzbioru U rozmaito´sci M ⊆ IR
k
, q ∈ V ,
to r´o˙zniczka Dψ(q): IR
m
−→ IR
k
odwzorowuje przestrze´
n IR
m
na T
ψ(q)
M . Je´sli Q jest kostka
,
o ´srodku q , to Dψ(q)(Q) ⊆ T
ψ(q)
jest m –wymiarowym r´ownoleg lo´scianem, kt´orego obje
,
to´s´c r´ow-
147
na jest
q
det Dψ(q)
T
· Dψ(q)
· `
m
(Q) . To sugeruje naste
,
puja
,
ca
,
definicje
,
: je´sli A ⊆ V , to
`
M
(ψ(A)) =
R
A
q
det Dψ(q)
T
· Dψ(q)
d`
m
.
Tutaj `
M
oznacza miare
,
na rozmaito´sci, kt´ora
,
w la´snie definiujemy. Nazywa´c ja
,
be
,
dziemy miara
,
Lebesgue’a–Riemanna na M . Taka definicja wymaga po pierwsze stwierdzenia, ˙ze wynik jest zale˙zny
jedynie od zbioru ψ(A) , a nie od A , ψ itp. Po drugie trzeba wyja´sni´c, dla jakich zbior´ow okre´slamy
miare
,
, po trzecie trzeba rozszerzy´c te
,
definicje
,
na zbiory, kt´ore nie sa
,
zawarte w dziedzinie jednej
mapy, czyli na taki, kt´orych nie mo˙zna sparametryzowa´c za pomoca
,
jednego przekszta lcenia ψ .
Zaczniemy od pierwszej kwestii. Dow´od odpowiedniego lematu poprzedzimy dosy´c wa˙znym
twierdzeniem opisuja
,
cym strukture
,
przekszta lcenia klasy C
r
, kt´orego r´o˙zniczka ma rza
,
d niezale˙zny
od punktu.
Twierdzenie o rze
,
dzie
Je´sli ψ: V −→ IR
l
jest przekszta lceniem klasy C
r
, r ≥ 1 i dla ka˙zdego x ∈ V ⊆ IR
k
zachodzi
r´owno´s´c r(Dψ)(x) = m , to dla ka˙zdego punktu q ∈ V istnieja
,
otwarte otoczenia V
1
3 q oraz
V
2
3 ψ(q) oraz dyfeomorfizmy (na obraz) f : V
1
−→ IR
k
, g: V
2
−→ IR
l
takie, ˙ze
g ◦ ψ ◦ f
−1
(x
1
, x
2
, . . . , x
k
) = (x
1
, x
2
, . . . , x
m
, 0, . . . , 0
| {z }
l−m
)
Dow´
od. Niech ψ = (ψ
1
, ψ
2
, . . . , ψ
l
) . Niech q ∈ V . Poniewa˙z rza
,
d przekszta lcenia Dψ(q)
r´owny jest m , wie
,
c pewien minor wymiaru m macierzy Dψ(q) =
∂ψ
i
∂x
j
(q)
jest r´o˙zny od 0 .
Po ewentualnej zmianie numeracji wsp´o lrze
,
dnych w dziedzinie lub w obrazie mo˙zna przyja
,
´c, ˙ze
∂ψ
i
∂x
j
(q)
1≤i,j≤m
6= 0 . Niech f (x) = f (x
1
, . . . x
k
) = ψ
1
(x), ψ
2
(x), . . . , ψ
m
(x), x
m+1
, x
m+2
, . . . , x
k
,
oczywi´scie je´sli m = k , to wsp´o lrze
,
dnych o numerach wie
,
kszych ni˙z m = k nie ma. Przekszta lcenie
f jest oczywi´scie tej samej klasy co ψ (a przynajmniej nie mniejszej). Mamy
Df (q) =
∂ψ
1
∂x
1
(q)
. . .
∂ψ
1
∂x
m
(q)
∂ψ
1
∂x
m+1
(q) . . .
∂ψ
1
∂x
k
(q)
∂ψ
2
∂x
1
(q)
. . .
∂ψ
2
∂x
m
(q)
∂ψ
2
∂x
m+1
(q) . . .
∂ψ
2
∂x
k
(q)
..
.
. ..
..
.
..
.
. ..
..
.
∂ψ
m
∂x
1
(q) . . .
∂ψ
m
∂x
m
(q)
∂ψ
m
∂x
m+1
(q) . . .
∂ψ
m
∂x
k
(q)
0
. . .
0
1
. . .
0
..
.
. ..
..
.
..
.
. ..
..
.
0
. . .
0
0
. . .
1
Wyznacznik tej macierzy r´owny jest
∂ψ
i
∂x
j
(q)
1≤i,j≤m
·
1 . . . 0
..
.
. .. ...
0 . . . 1
6= 0 . Wynika sta
,
d (twierdzenie
o odwracaniu funkcji), ˙ze istnieje otoczenie V
1
punktu q , po obcie
,
ciu do kt´orego f jest dyfe-
omorfizmem. Pierwszych m wsp´o lrze
,
dnych przekszta lcenia ψ ◦ f
−1
pokrywa sie
,
z pierwszymi m
wsp´o lrze
,
dnymi przekszta lcenia f ◦ f
−1
= id . Niech ψ(f
−1
(x)) = (x
1
, . . . , x
m
, ˜
ψ
m+1
(x), . . . , ˜
ψ
l
(x)) .
148
Bez trudu stwierdzamy, ˙ze
D(ψ ◦ f
−1
)(x) =
1
0
. . .
0
0
. . .
0
0
1
. . .
0
0
. . .
0
..
.
..
.
. ..
..
.
..
.
. ..
..
.
0
0
. . .
1
0
. . .
0
∂ ˜
ψ
m+1
∂x
1
(x)
∂ ˜
ψ
m+1
∂x
2
(x) . . .
∂ ˜
ψ
m+1
∂x
m
(x)
∂ ˜
ψ
m+1
∂x
m+1
. . .
∂ ˜
ψ
m+1
∂x
k
(x)
..
.
..
.
. ..
..
.
..
.
. ..
..
.
∂ ˜
ψ
l
∂x
1
(x)
∂ ˜
ψ
l
∂x
2
(x)
. . .
∂ ˜
ψ
l
∂x
m
(x)
∂ ˜
ψ
l
∂x
m+1
. . .
∂ ˜
ψ
l
∂x
k
(x)
Z lo˙zenie przekszta lcenia liniowego z izomorfizmem nie zmienia rze
,
du. Wobec tego rza
,
d D(ψ◦f
−1
)(x)
jest r´owny m , czyli taki sam jak macierz jednostkowa znajduja
,
ca sie
,
w lewym g´ornym rogu ma-
cierzy D(ψ ◦ f
−1
)(x) . Wynika sta
,
d, ˙ze
∂ ˜
ψ
i
∂x
j
(x) = 0 dla i = m + 1, . . . , l , j = m + 1, . . . , k .
Oznacza to, ˙ze funkcje ˜
ψ
m+1
, ˜
ψ
m+2
, . . . , ˜
ψ
l
nie zale˙za
,
od zmiennych x
m+1
, x
m+2
, . . . , x
k
, po ewen-
tualnym zmniejszeniu V
1
mo˙zna przyja
,
´c, ˙ze f (V
1
) jest k –wymiarowym przedzia lem, wie
,
c nie mam
k lopotu z wywnioskowaniem sta lo´sci funkcji, kt´orej pochodna jest zerowa. Mamy wie
,
c prawo pisa´c
˜
ψ
j
(x
1
, . . . , x
m
) zamiast ˜
ψ
j
(x
1
, . . . , x
m
, x
m+1
, . . . , x
k
) w przypadku j = m + 1, . . . , l . Definiujemy
teraz g(y
1
, . . . , y
l
) = y
1
, . . . , y
m
, y
m+1
− ˜
ψ
m+1
(y
1
, . . . , y
m
), . . . , y
l
− ˜
ψ
l
(y
1
, . . . , y
m
)
. Mo˙zna z la-
two´scia
,
przekona´c sie
,
o tym, ˙ze g ◦ ψ ◦ f
−1
(x
1
, . . . , x
k
) = (x
1
, . . . , x
m
, 0, . . . , 0) oraz ˙ze g jest
dyfeomorfizmem: g
−1
(y
1
, . . . , y
l
) = y
1
, . . . , y
m
, y
m+1
+ ˜
ψ
m+1
(y
1
, . . . , y
m
), . . . , y
l
+ ˜
ψ
l
(y
1
, . . . , y
m
)
.
Dow´od zosta l zako´
nczony.
Lemat o przechodzeniu od jednej mapy do drugiej mapy
Je´sli ψ: V −→ IR
k
i ˜
ψ: ˜
V −→ IR
k
sa
,
homeomorfizmami klasy C
r
, r ≥ 1 , kt´orych r´o˙zniczki we
wszystkich punktach sa
,
r´o˙znowarto´sciowe, ψ(V ) = ˜
ψ( ˜
V ) , to przekszta lcenie ψ
−1
◦ ˜
ψ jest dyfeomor-
fizmem.
Dow´
od. Niech q ∈ V . Zgodnie z twierdzeniem o rze
,
dzie istnieja
,
(lokalnie) dyfeomorfizmy g
i f takie, ˙ze g ◦ ψ ◦ f
−1
(x
1
, . . . , x
m
) = (x
1
, . . . , x
m
, 0 . . . , 0) w pewnym otoczeniu punktu f (q) .
Przekszta lcenie g ◦ ψ ◦ f
−1
formalnie przekszta lca pewien podzbi´or przestrzeni IR
m
w przestrze´
n
IR
k
, ale faktycznie — w IR
m
. Mo˙zna je wie
,
c odwraca´c, odwrotne jest klasy C
r
. Zachodzi r´owno´s´c
ψ
−1
◦ ˜
ψ = f
−1
◦ g ◦ ψ ◦ f
−1
−1
◦ g ◦ ˜
ψ .
Z niej wynika, ˙ze ψ
−1
◦ ˜
ψ klasy C
r
, bo jest z lo˙zeniem przekszta lce´
n takiej klasy (r´o˙zniczkowalno´s´c w
punkcie jest w lasno´scia
,
lokalna
,
, wie
,
c niczemu w dowodzie nie przeszkadza to, ˙ze rozwa˙zane z lo˙zenie
jest okre´slone jedynie w dostatecznie ma lym otoczeniu punktu f (q) ). Jest to oczywi´scie prawda
,
r´ownie˙z w przypadku przekszta lcenia odwrotnego ˜
ψ
−1
◦ ψ , zatem jest to dyfeomorfizm.Dow´od zos-
ta l zako´
nczony.
Lemat o niezale˙zno´sci miary od mapy
Je´sli ψ: V −→ IR
k
i ˜
ψ: ˜
V −→ IR
k
sa
,
homeomorfizmami klasy C
r
, r ≥ 1 , kt´orych r´o˙zniczki we
149
wszystkich punktach sa
,
r´o˙znowarto´sciowe, A ⊆ ψ(V ) = ˜
ψ( ˜
V ) jest zbiorem borelowskim, to
R
ψ
−1
(A)
q
det Dψ(q)
T
· Dψ(q)
d`
m
=
R
˜
ψ
−1
(A)
q
det D ˜
ψ(q)
T
· D ˜
ψ(q)
d`
m
.
Dow´
od. Skorzystamy z tego, ˙ze przekszta lcenie ˜
ψ
−1
◦ ψ jest dyfeomorfizmem (poprzedni
lemat). Z twierdzenia o zamianie zmiennych wynika, ˙ze
we wzorach poni˙zej q = ˜
ψ
−1
◦ ψ
(x)
R
˜
ψ
−1
(A)
q
det D ˜
ψ(q)
T
· D ˜
ψ(q)
d`
m
(q) =
=
R
ψ
−1
(A)
q
det D ˜
ψ(q)
T
· D ˜
ψ(q)
·
det D( ˜
ψ
−1
◦ψ)(x)
d`
m
(x) =
=
R
ψ
−1
(A)
q
det D ˜
ψ(q)
T
· D ˜
ψ(q)
· det D( ˜
ψ
−1
◦ ψ)(x)
2
d`
m
(x) =
=
R
ψ
−1
(A)
q
det D( ˜
ψ
−1
◦ ψ)(x)
T
· det D ˜
ψ(q)
T
D ˜
ψ(q)
· det D( ˜
ψ
−1
◦ ψ)(x)d`
m
(x) =
=
R
ψ
−1
(A)
q
det
D( ˜
ψ
−1
◦ ψ)(x)
T
· D ˜
ψ(q)
T
· D ˜
ψ(q) · D( ˜
ψ
−1
◦ ψ)(x)
d`
m
(x) =
=
R
ψ
−1
(A)
q
det
D ˜
ψ(q) · D( ˜
ψ
−1
◦ ψ)(x)
T
D ˜
ψ ◦ ˜
ψ
−1
◦ ψ
(x)
d`
m
(x) =
=
R
ψ
−1
(A)
q
det
Dψ(x)
T
Dψ(x)
d`
m
(x) .
W tym rozumowaniu korzystali´smy z tego, ˙ze wyznacznik iloczynu macierzy kwadratowych jest
iloczynem wyznacznik´ow macierzy oraz, ˙ze w mno˙zenie liczb jest przemienne (mno˙zenie macierzy
niestety przemienne nie jest).
Teraz mo˙zna ju˙z zdefiniowa´c miare
,
na rozmaito´sci M ⊆ IR
k
. Istnieje na ka˙zdej z nich atlas
z lo˙zony z nie wie
,
cej ni˙z przeliczalnej liczby map ϕ
1
, ϕ
2
, . . . . Za l´o˙zmy, ˙ze ich dziedzinami sa
,
zbiory U
1
, U
2
, . . . Je´sli A ⊆ M jest zbiorem borelowskim, to ka˙zdy ze zbior´ow V
1
:= A ∩ U
1
,
V
2
:= A ∩ U
2
\ U
1
, V
3
:= A ∩ U
3
\ (U
1
∪ U
2
) , . . . jest borelowski, sa
,
one parami roz la
,
czne, wie
,
c
mo˙zna miare
,
okre´sli´c wzorem
`
M
(A) =
∞
X
n=1
`
M
(V
n
) , gdzie `
M
(V
n
) =
R
ϕ
n
(V
n
)
q
det Dϕ
−1
(x)
T
Dϕ
−1
(x)
d`
m
(x) .
Wykazali´smy, ˙ze wynik nie zale˙zy od wyboru mapy. Jest jasne, ˙ze jest on r´ownie˙z niezale˙zny od spo-
sobu rozbicia zbioru A na roz la
,
czne podzbiory mieszcza
,
ce sie
,
w dziedzinach map z jednego atlasu (na
dziedzinie jednej mapy `
m
jest miara
,
, wie
,
c maja
,
c dwa rozbicia przeliczalne rozbicia {V
n
} i {W
m
}
zbioru A mo˙zemy rozwa˙zy´c rozbicie przeliczalne {V
n
∩ W
m
} zbioru A ). Miare
,
okre´slili´smy na zbio-
rach borelowskich. Mo˙zna ja
,
uzupe lni´c (np. korzystaja
,
c z twierdzenia Carat´eodory’go) do la
,
czaja
,
c
do σ –cia la podzbiory zbior´ow miary 0 . Mo˙zna te˙z od razu przyja
,
´c, ˙ze zbi´or A jest mierzalny wte-
dy i tylko wtedy, gdy zbi´or ϕ(A ∩ U ) jest mierzalny dla dowolnej mapy ϕ okre´slonej na zbiorze
U . Rozumowanie nie ulega zmianie, bo dyfeomorfizmy przekszta lcaja
,
zbiory mierzalne na zbiory
mierzalne.
Przyk lad (sfera)
Znajdziemy miare
,
sfery k –wymiarowej S
k
⊆ IR
k+1
. Miara zbiory sko´
nczonego jest oczywi´scie
150
r´owna 0 . Rzut stereograficzny przekszta lca sfere
,
bez jednego punktu na IR
k
. Wystarczy wie
,
c znale´z´c
ca lke
,
R
IR
k
q
det Dψ(q)
T
· Dψ(q)
d`
k
, gdzie ψ(x) =
2x
1+kxk
2
,
kxk
2
−1
kxk
2
+1
, x = (x
1
, x
2
, . . . , x
k
) ∈ IR
k
.
Zaczniemy od znalezienia Dψ(x) . Korzystaja
,
c ze standardowych praw r´o˙zniczkowania otrzymu-
jemy:
Dψ(x)h =
2h
1+kxk
2
− 2x
2x·h
(1+kxk
2
)
2
,
−4x·h
(1+kxk
2
)
2
.
Mamy wie
,
c
Dψ(x)h
2
=
4khk
2
(1+kxk
2
)
2
−
16(x·h)
2
(1+kxk
2
)
3
+
16kxk
2
(x·h)
2
(1+kxk
2
)
4
+
16(x·h)
2
(1+kxk
2
)
4
=
4khk
2
(1+kxk
2
)
2
. Wykazali´smy
wie
,
c, ˙ze przekszta lcenie liniowe Dψ(x) przekszta lca wektor h na wektor o d lugo´sci
2khk
1+kxk
2
. Jest
wie
,
c podobie´
nstwem w skali
2
1+kxk
2
. Oznacza to, ˙ze kolumny macierzy dψ(x) sa
,
wzajemnie pro-
stopad lymi wektorami o d lugo´sci
2
1+kxk
2
, a sta
,
d wynika, ˙ze det Dψ(q)
T
· Dψ(q)
=
2
1+kxk
2
k
.
Miara sfery S
k
jest wie
,
c r´owna
R
IR
k
2
1+kxk
2
k
d`
k
. Dla obliczenia tej ca lki zastosujemy wsp´o lrze
,
dne
sferyczne (biegunowe). Przyjmujemy wie
,
c jak w cze
,
´sci dziewia
,
tej, gdy obliczali´smy miare
,
kuli k –wy-
miarowej, ˙ze
x
1
=% cos θ
1
cos θ
2
· . . . · cos θ
k−2
cos θ
k−1
x
2
=% cos θ
1
cos θ
2
· . . . · cos θ
k−2
sin θ
k−1
x
3
=% cos θ
1
cos θ
2
· . . . · sin θ
k−2
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
x
k−2
=% cos θ
1
cos θ
2
sin θ
3
x
k−1
=% cos θ
1
sin θ
2
x
k
=% sin θ
1
Niech H = {(θ
1
, θ
2
, . . . , θ
k−2
, θ
k−1
):
|θ
1
| <
π
2
, |θ
2
| <
π
2
, . . . , |θ
k−2
| <
π
2
, |θ
k−1
| < π} . Z twierdzenia
o zamianie zmiennych wynika, ˙ze (nie przejmujemy sie
,
zbiorami miary 0 )
`
S
k
(S
k
) =
R
IR
k
2
1+kxk
2
k
d`
k
=
R
(0,∞)×H
2
1+%
2
k
%
k−1
cos
k−2
θ
1
cos
k−3
θ
2
. . . cos θ
k−2
d`
k
=
F ubini
=======
R
(0,∞)
2
1+%
2
k
%
k−1
d% ·
R
H
cos
k−2
θ
1
cos
k−3
θ
2
. . . cos θ
k−2
d`
k−1
=
=
R
∞
0
2
1+%
2
k
%
k−1
d% · k`
k
(B(0, 1))
%=tg t
==========
d%=(1+tg
2
t)
2
R
π/2
0
2 tg t
1+tg
2
t
k−1
dt · k`
k
(B(0, 1)) =
= 2
R
π/2
0
sin
k−1
2tdt · k`
k
(B(0, 1)) =
R
π
0
sin
k−1
τ dτ · k`
k
(B(0, 1)) =
=
(
k−2
k−1
·
k−4
k−3
· . . . ·
1
2
· π · k`
k
(B(0, 1)), je´sli k > 1 jest nieparzyste ;
k−2
k−1
·
k−4
k−3
· . . . ·
2
3
· 2 · k`
k
(B(0, 1)),
je´sli k > 2 jest parzyste.
Mo˙zemy wie
,
c napisa´c `
S
k
(S
k
) =
Γ(
k
2
)
Γ(
k+1
2
)
·
√
π ·k ·`
k
(B(0, 1)) , przy czym ten ostatni wz´or zachodzi dla
k = 1, 2, . . . do sprawdzenia jego prawdziwo´sci zache
,
cam student´ow: przy okazji mo˙zna przypomnie´c
sobie czym jest jest funkcja Γ . Na wszelki wypadek : Γ(
1
2
) =
√
π , Γ(x + 1) = xΓ(x) dla x > 0 .
Otrzymali´smy wie
,
c wz´or ma miare
,
sfery wielowymiarowej o promieniu 1 . Jasne jest, ˙ze z tego
151
wzoru bez trudu mo˙zna otrzyma´c wz´or na miare
,
sfery k –wymiarowej o promieniu r > 0 .
Zadanko
Wykaza´c, ˙ze je´sli S
r
jest k –wymiarowa
,
sfera
,
o promieniu r , to
`
S
r
(S
r
) = r
k
`
S
k
(S
k
) = r
k Γ(
k
2
)
Γ(
k+1
2
)
·
√
π · k · `
k
(B(0, 1)) .
Zadanko
Wykaza´c, ˙ze liczba
R
R
0
`
S
r
(S
r
)dr jest miara
,
k + 1 –wymiarowej kuli o promieniu R > 0 .
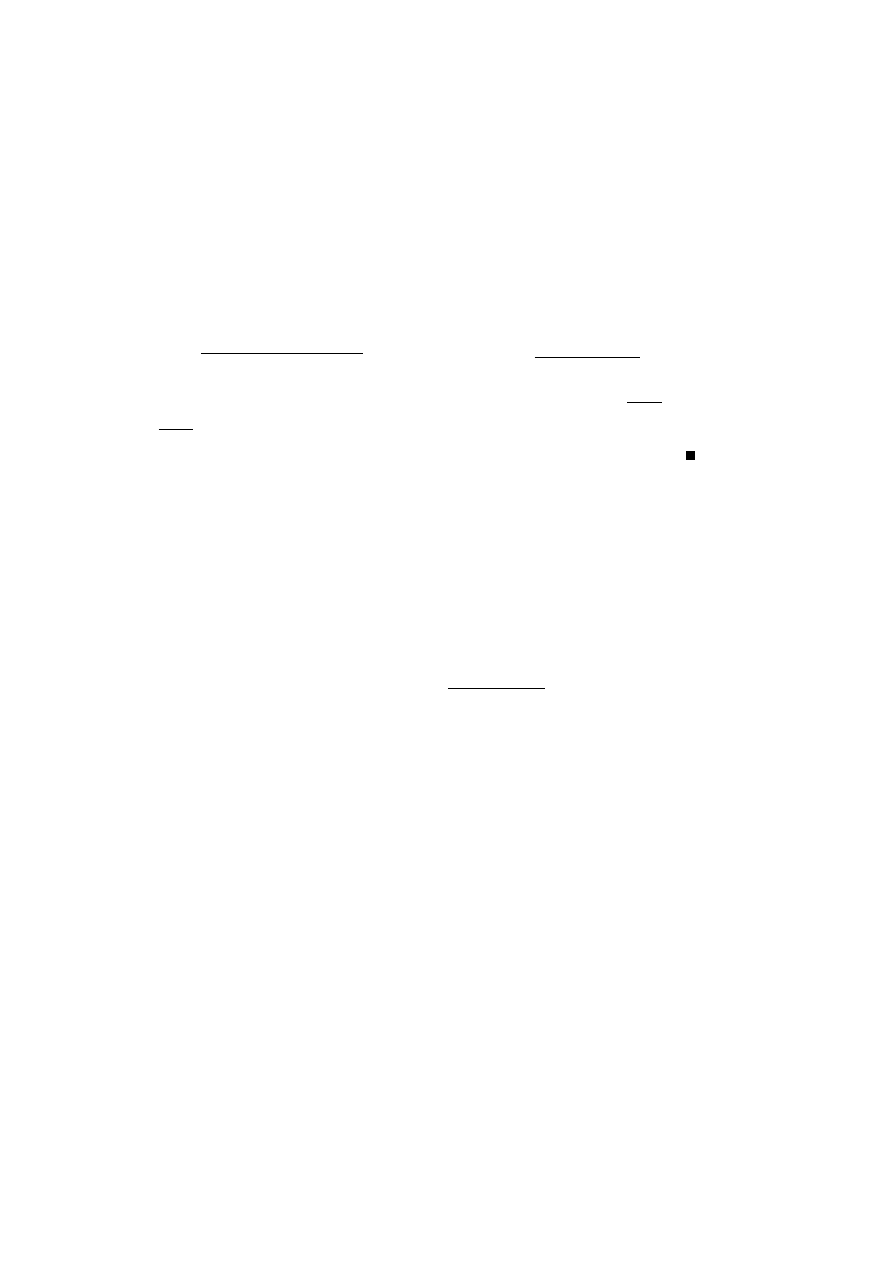
Drugie zadanie jest wa˙zne. Nale˙zy spr´obowa´c zrozumie´c dlaczego to twierdzenie jest prawdziwe.
Ono obejmuje wzory, kt´ore wszyscy ko´
ncza
,
cy licea znaja
,
, ale nieliczni je zauwa˙zaja
,
:
πr
2
0
= 2πr ,
4
3
πr
3
0
= 4πr
2
.
W zasadzie niewiele zosta lo tu do zrobienia, wystarczy sie
,
uwa˙znie przyjrze´c temu, co zrobili´smy.
W cze
,
´sci dziewia
,
tej zdefiniowali´smy ´srodek cie
,
˙zko´sci zbioru borelowskiego A ⊆ IR
k
. Poje
,
cie
to mo˙zemy teraz stosowa´c do rozmaito´sci. Mo˙zna te˙z wykaza´c twierdzenie Pappusa—Guldina dla
powierzchni obrotowych.
Twierdzenie Pappusa–Guldina
∗
Je´sli A ⊆ ˜
M ⊆ {x ∈ IR
3
:
x
2
= 0 < x
1
} jest zbiorem, kt´ory ma ´srodek cie
,
˙zko´sci wzgle
,
dem miary
`
˜
M
, ˜
M jest rozmaito´scia
,
, B jest zbiorem, kt´ory powstaje w wyniku obrotu zbioru A o ka
,
t 2π
wok´o l prostej x
1
= x
2
= 0 , to `
M
(B) = 2πr`
˜
M
(A) , gdzie r jest odleg lo´scia
,
´srodka cie
,
˙zko´sci zbioru
A od osi obrotu, M ⊆ IR
3
jest rozmaito´scia
,
powsta la
,
w wyniku obrotu rozmaito´sci ˜
M wok´o l prostej
x
1
= x
2
= 0 .
Dow´
od. Zaczniemy oczywi´scie od wykazania, ˙ze M jest rozmaito´scia
,
zak ladaja
,
c, ˙ze ˜
M jest
rozmaito´scia
,
jednowymiarowa
,
. Przypadek dwuwymiarowej rozmaito´sci ˜
M jest obje
,
ty poprzednia
,
wersja
,
tego twierdzenia, rozmaito´sci wymiaru 0 nie sa
,
przesadnie interesuja
,
ce: sa
,
to przestrze-
nie dyskretne. Niech ˜
U be
,
dzie dziedzina
,
mapy ˜
ϕ i niech ˜
ψ = ˜
ϕ
−1
, ˜
V = ˜
ϕ( ˜
U ) . Niech ˜
ψ(x) =
(ψ
1
(x), 0, ψ
3
(x)) . Definiujemy ψ(x, t) = ψ
1
(x) cos t, ψ
1
(x) sin t, ψ
3
(x)
. Je´sli liczby t wybierane sa
,
z przedzia lu (α, β) o d lugo´sci mniejszej ni˙z 2π , to przekszta lcenie ψ jest cia
,
g le i r´o˙znowarto´sciowe.
R´o˙znowarto´sciowo´s´c wynika natychmiast z r´o˙znowarto´sciowo´sci ˜
ψ i r´o˙znowarto´sciowo´sci przekszta l-
cenia t −→ (cos t, sin t) na przedziale d lugo´sci < 2π . Przekszta lcenie ψ jest homeomorfizmem: je´sli
ψ(x
n
, t
n
) −−−−→
n→∞
ψ(y, s) , to ψ
3
(x
n
) −−−−→
n→∞
ψ(y) i
ψ
1
(x
n
) =
q
ψ
1
(x
n
) cos t
n
2
+ ψ
1
(x
n
) sin t
n
2
−−−−→
n→∞
q
ψ
1
(y) cos s
2
+ ψ
1
(y) sin s
2
= ψ(y) .
Sta
,
d i z cia
,
g lo´sci ϕ wynika, ˙ze x
n
−−−−→
n→∞
y . Co najmniej jedna z liczb | cos s| , | sin s| jest r´o˙zna
od 1 . Dla ustalenia uwagi niech −1 < cos s < 1 . Wtedy w pewnym otoczeniu liczby s funkcja cos
jest homeomorfizmem. Wobec tego z r´owno´sci lim
n→∞
cos t
n
= cos s wynika, ˙ze lim
n→∞
t
n
= s . Mamy
∗ Pappus (290–350), Guldin(1577–1643)
152
Dψ(x, t) =
ψ
0
1
(x) cos t
−ψ
1
(x) sin t
ψ
0
1
(x) sin t
ψ
1
(x) cos t
ψ
0
3
(x)
0
.
Mamy wie
,
c
Dψ(x, t)
T
Dψ(x, t) =
ψ
0
1
(x)
2
+ ψ
0
3
(x)
2
0
0
ψ
2
1
.
Wobec tego det Dψ(x, t)
T
Dψ(x, t)
= ψ
0
1
(x)
2
+ ψ
0
3
(x)
2
ψ
1
(x)
2
> 0 , bo D ˜
ψ(x) jest r´o˙znowarto´s-
ciowe, zatem Dψ(x, t) r´ownie˙z jest r´o˙znowarto´sciowe (rza
,
d tego przekszta lcenia liniowego jest r´ow-
ny 2). Wskazali´smy wie
,
c atlas dla M . Mo˙zemy teraz znale´z´c miare
,
zbioru ψ(ϕ(A) × (0, 2π)) . Jest
ona na mocy definicji r´owna
R
ϕ(A)×(0,2π)
q
ψ
0
1
(x)
2
+ ψ
0
3
(x)
2
ψ
1
(x)
2
F ubini
======= 2π
R
ϕ(A)
ψ
1
(x)
p
ψ
0
1
(x)
2
+ ψ
0
3
(x)
2
d`
1
(x) =
= 2π
R
A
x
1
d`
˜
M
(x) = 2π`
˜
M
(A) ·
1
`
˜
M
(A)
R
A
x
1
d`
˜
M
(x) .
Liczba
1
`
˜
M
(A)
R
A
x
1
d`
˜
M
(x) to pierwsza wsp´o lrze
,
dna ´srodka cie
,
˙zko´sci zbioru A wzgle
,
dem miary `
˜
M
,
zatem jest to odleg lo´s´c od prostej x
1
= 0 = x
2
, czyli od osi obrotu, jest wie
,
c r´owna r .
Wida´c wie
,
c, ˙ze jest to taki sam dow´od, jak poprzedniej wersji tego twierdzenia. Z tego twierdze-
nia latwo mo˙zna wyprowadzi´c wzory na pole powierzchni bocznej sto˙zka, lub og´olniej sto˙zka ´scie
,
tego
— wystarczy stwierdzi´c, ˙ze ´srodkiem cie
,
˙zko´sci odcinka jest jego ´srodek. Mo˙zna znale´z´c wz´or na pole
powierzchni torusa, je´sli tylko zdo lamy wykaza´c, ˙ze ´srodkiem cie
,
˙zko´sci okre
,
gu (nie ko la!) jest jego
´srodek. Wz´or jest u˙zyteczny i latwy w dowodzie. W zasadzie to szczeg´olny przypadek twierdzenia
Fubiniego.
Warto doda´c jeszcze, ˙ze je´sli f : M −→ [0, ∞] jest funkcja
,
mierzalna
,
a zbi´or A ⊆ M jest
zawarty w obrazie parametryzacji ψ: V −→ M ⊆ IR
k
, to
R
A
f d`
M
=
R
ψ
−1
(A)
f ◦ ψ
p
Dψ(x)
T
Dψ(x)d`
m
(x) .
Ten wz´or pozwala w wielu przypadkach na ca lkowanie funkcji okre´slonych na rozmaito´sciach. Oczy-
wi´scie funkcje
,
nieujemna mo˙zna zasta
,
pi´c funkcja
,
ca lkowalna
,
lub taka
,
, kt´ora ma ca lke
,
, niekoniecznie
sko´
nczona
,
.
153
Wyszukiwarka
Podobne podstrony:
am2cz17 frenet
am2cz10
am2cz13
am2cz11
am2cz16
am2cz15 kolnierzyki
więcej podobnych podstron