©
Scania CV AB 1999, Sweden
12:03-07
Wydanie 3
pl
Jednostka sterująca
ELC drugiej generacji
Opis i działanie
1 587 988
106 335
Aktualizacja dotycząca jednostki sterującej ELC 2.1A nowej
generacji, wprowadzonej w sierpniu 1998 roku.

2
©
Scania CV AB 1999, Sweden
Spis treści
Uwagi dotyczące zachowania
bezpieczeństwa
Praca pod pojazdami z zawieszeniem
pneumatycznym ..............................................
Prowadzenie pojazdów z zawieszeniem
pneumatycznym ..............................................
5
5
Informacje ogólne
Wprowadzenie ................................................
Zmiany .............................................................
Identyfikacja wersji jednostki .......................
6
6
7
Opis układu
...........................................................................
Rozkład ciężaru na osi ...................................
Hamulec ręczny ..............................................
8
8
8
Poziom jezdny
Normalny .........................................................
Podniesiony .....................................................
Tymczasowy .....................................................
Dla umocowanego pojazdu ...........................
9
9
9
9
Kontrola
Szybka kontrola ..............................................
Standardowa kontrola ....................................
Hamowanie .....................................................
10
10
10
Sterowanie i działanie
........................................................................... 11
Pojazdy z osią wleczoną
Przełącznik podnośnika osi wleczonej i
prznoszenia obciążenia ..................................
Podnoszenie osi wleczonej.............................
Procedura podnoszenia osi wleczonej..........
Przenoszenie obciążenia ................................
Pojazdy z dwiema osiami wleczonymi..........
11
11
12
12
13
Pojazdy z wózkiem zwrotnym
posobnym
Przełącznik.......................................................
Blokada mechanizmu różnicowego podczas
przenoszenia obciążenia ................................
13
13
Spis treści

©
Scania CV AB 1999, Sweden
3
Spis treści cd.
Przenoszenie obciążenia
...........................................................................
Z ograniczeniem czasowym ...........................
Bez ograniczenia czasowego ..........................
Procedura przenoszenia obciążenia ..............
Ograniczenie prędkości ..................................
14
14
15
15
15
Konfiguracja
Grupy konfiguracji .......................................... 16
Inne konfiguracje
Podstawowa......................................................
Z szybką kontrolą............................................
Z obsługą obciążenia ......................................
16
16
16
Skrzynka sterująca
...........................................................................
Pojazdy z zawieszeniem typu A.....................
Czuwanie ..........................................................
Ustawianie stanu czuwania ............................
Programowanie jednostek M1 i M2 ..............
Regulacja poziomu..........................................
17
18
18
18
18
18
Układ elektryczny
Jednostka sterująca .........................................
Sygnał wejściowy i wyjściowy ........................
Połączenia jednostki sterującej ......................
Wymiana jednostki sterującej ........................
Kalibracja .........................................................
20
20
20
22
22
Lampki kontrolne
Usterka układu ................................................
Usterka poziomu .............................................
Przenoszenie obciążenia.................................
22
23
23
Spis treści

4
©
Scania CV AB 1999, Sweden
Spis treści cd.
Zawory i czujniki
........................................................................... 25
Blok zaworów
elektromagnetycznych
Blok zaworów elektromagnetycznych V54 .
Blok zaworów elektromagnetycznych
V54+V55 ..........................................................
25
27
Zawór elektromagnetyczny
Zawór elektromagnetyczny V32................... 29
Czujnik poziomu
Czujniki poziomu T72 i T73 .......................... 29
Czujnik ciśnienia
Czujniki ciśnienia T70 i T71 .......................... 31
Spis treści
1200f13o.mkr
©
Scania CV AB 1999, Sweden
5
Jednostka sterująca ELC drugiej
generacji
Uwagi dotyczące
zachowania
bezpieczeństwa
Praca pod pojazdami z
zawieszeniem pneumatycznym
Prace prowadzone pod pojazdami z
zawieszeniem pneumatycznym należy
przeprowadzać z zachowaniem
szczególnych środków ostrożności.
W przypadku upadku ramy na oś istnieje
ryzyko powstania urazów spowodowanych
uderzeniem lub przyciśnięciem.
OSTRZEŻENIE!
!
Podczas pracy pod pojazdem z
zawieszeniem pneumatycznym zawsze
należy używać odpowiednich
wsporników do podparcia pojazdu.
Rama może spaść na oś w przypadku gdy:
•
Miech powietrzny jest przebity.
•
Przewód powietrzny został odłączony.
•
W celu opróżnienia miecha do zaworu
podłączone zostało napięcie.
•
Zawór poziomujący jest obsługiwany
przy włączonym napięciu rozrusznika.
Prowadzenie pojazdów z
zawieszeniem pneumatycznym
Podczas jazdy wysokość pojazdu powinna
zostać ustawiona na normalny poziom
jezdny. Aby ustawić ten poziom wysokości
pojazdu, należy nacisnąć zielony przycisk
znajdujący się na skrzynce sterującej. Przed
jego naciśnięciem nacisnąć co najmniej
jeden z przycisków służących do
podnoszenia lub opuszczania pojazdu
(przedniej lub tylnej części). Po naciśnięciu
przycisków podnoszenia i opuszczania
zapalą się lampki znajdujące się na
jednostce sterującej.
Po osiągnięciu normalnego poziomu
jezdnego zgaśnie lampka kontrolna
informująca o usterce poziomu. Znajduje
się ona na tablicy przyrządów. Pojazd może
być prowadzony przy poziomie ustawionym
na inny niż normalny jedynie w
wyjątkowych przypadkach.
Uwagi dotyczące zachowania bezpieczeństwa

6
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Informacje ogólne
Wprowadzenie
Jednostka sterująca ELC drugiej generacji
(Electronic Level Control) jest
elektronicznym układem regulującym
zawieszenie pneumatyczne pojazdu.
Jednostka sterująca ELC drugiej generacji
oferuje wiele korzyści w porównaniu z
mechaniczną regulacją zawieszenia
pneumatycznego:
• Regulacja poziomu niezależnie od
wysokości pojazdu. Podczas załadunku i
rozładunku pojazd znajduje się na tej
samej wysokości.
•
Zmniejszone zużycie powietrza podczas
jazdy.
•
Udoskonalona funkcja przenoszenia
obciążenia dla pojazdów
trójosiowych.
•
Mniej złożony przewód powietrzny i
układ zaworów.
•
Hamowanie oraz skręcanie nie ma
wpływu na poziom jezdny.
•
Funkcja czuwania.
•
Możliwość wykorzystania funkcji
tymczasowego poziomu jezdnego.
Nowa jednostka sterująca ELC 2.1A
Od sierpnia 1998 roku do produkcji
wprowadzona została nowa jednostka
sterująca. Znana jest pod nazwą ELC
generacji 2.1A. Aby zachować zgodność dla
części zamiennych, nowa jednostka
sterująca zastępuje starszą jednostkę
sterującą drugiej generacji.
Zmiany
Różnice pomiędzy jednostkami ELC
drugiej generacji a jednostkami ELC
pierwszej generacji:
• Ta sama jednostka sterującej
wykorzystywana jest we wszystkich
typach pojazdów.
•
Funkcja czuwania dostępna jest dla
wszystkich typów pojazdów.
•
Rozmieszczenie ciężaru na osi tylnej
jest kontrolowane przy pomocy
czujników ciśnienia, znajdujących się w
miechu zawieszenia osi tylnej.
•
Automatyczne zwolnienie hamulca
ręcznego osi przedniej podczas obsługi
ładunku (dotyczy wszystkich pojazdów
z przednimi hamulcami sprężynowymi).
•
Podczas przenoszenia obciążenia
można podnieść poziom.
•
Podnośnik osi wleczonej zawsze
powraca ze stanu podniesionego do
normalnego.
•
Nowe złącza typu bagnetowego dla
wszystkich połączeń elektrycznych,
zgodne z normą DIN.
•
Nowy typ bloku zaworów
elektromagnetycznych. Cztery różne
rodzaje nowego bloku zaworów z 2 - 5
funkcjami w zależności od typu
pojazdu. Jako części zamienne dostępne
są jedynie bloki z 3 lub 5 funkcjami.
Niewykorzystywane otwory wylotowe
muszą zostać zaślepione.
•
Nowego typu zawory
elektromagnetyczne w bloku zaworów;
dwie lub trzy cewki są nierozdzielnie
połączone z kasetą przy pomocy
wspólnego złącza. Jako część zamienna
dostępny jest jedynie zawór z trzema
cewkami. Jeżeli jest on używany z
blokiem zaworów, posiadającym
jedynie dwie funkcje, trzecia cewka nie
jest wykorzystywana.
Informacje ogólne
1200f13o.mkr
©
Scania CV AB 1999, Sweden
7
Generacja 2.1A
Najistotniejsze zmiany wprowadzone w
jednostce sterującej nie mają wpływu na
działanie układu lub jego napraw. Jest kilka
różnic w działaniu układu, które zostały
przedstawione poniżej:
•
Możliwość odczytu danych
konfiguracyjnych jednostki sterującej
przy pomocy programów Scania
Programmer 2 i Scania Diagnos 2.
•
Możliwość wyłączenia funkcji
automatycznego obniżania osi
wleczonej po osiągnięciu
maksymalnego, dopuszczalnego
obciążenia osi tylnej podczas
podnoszenia osi wleczonej.
•
Możliwość używania skrzynki sterującej
również po uruchomieniu przenoszenia
obciążenia.
•
Jednostka kontrolna posiada funkcję
pamięci, dzięki której zapisane zostaje
czy po odłączeniu napięcia
rozruchowego uruchomione jest
przenoszenie obciążenia a oś wleczona
została podniesiona.
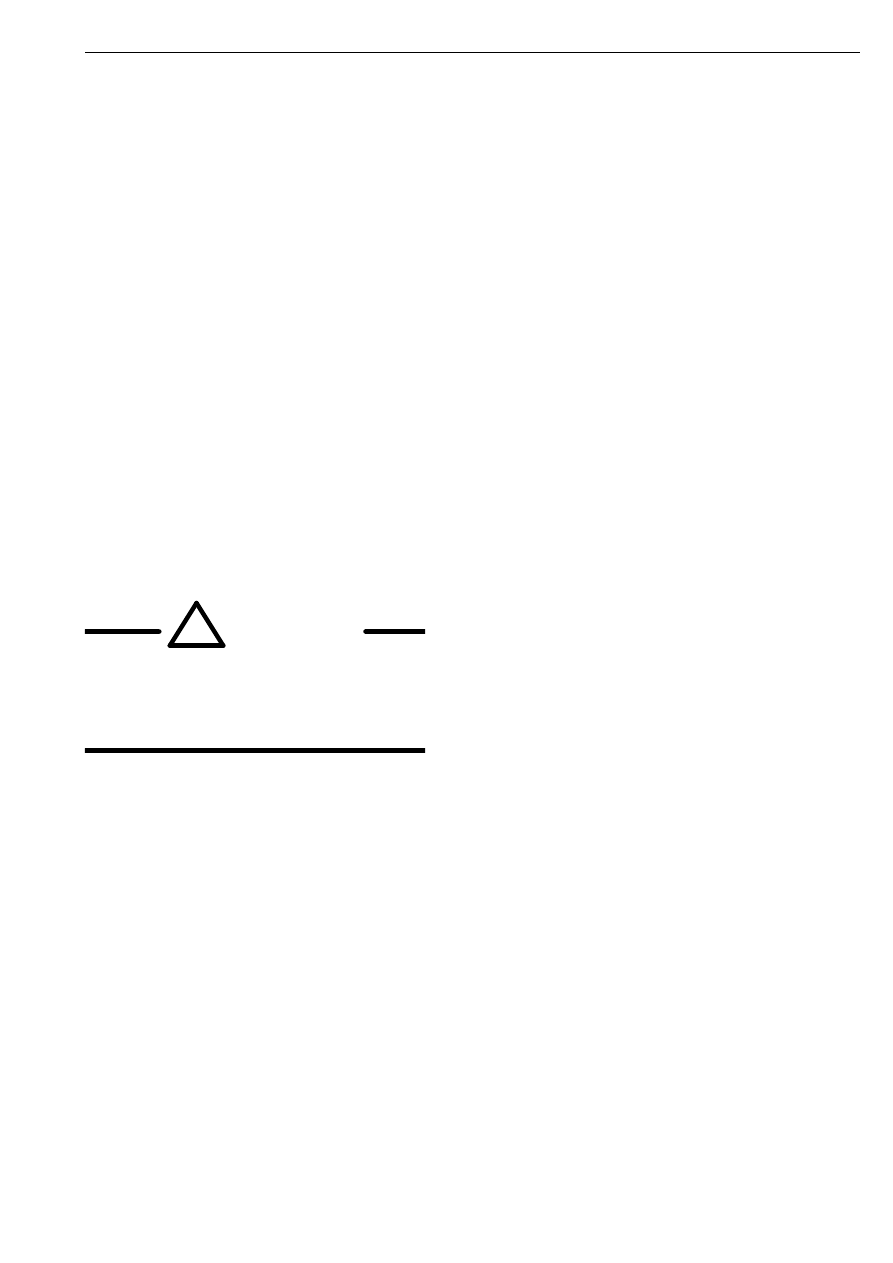
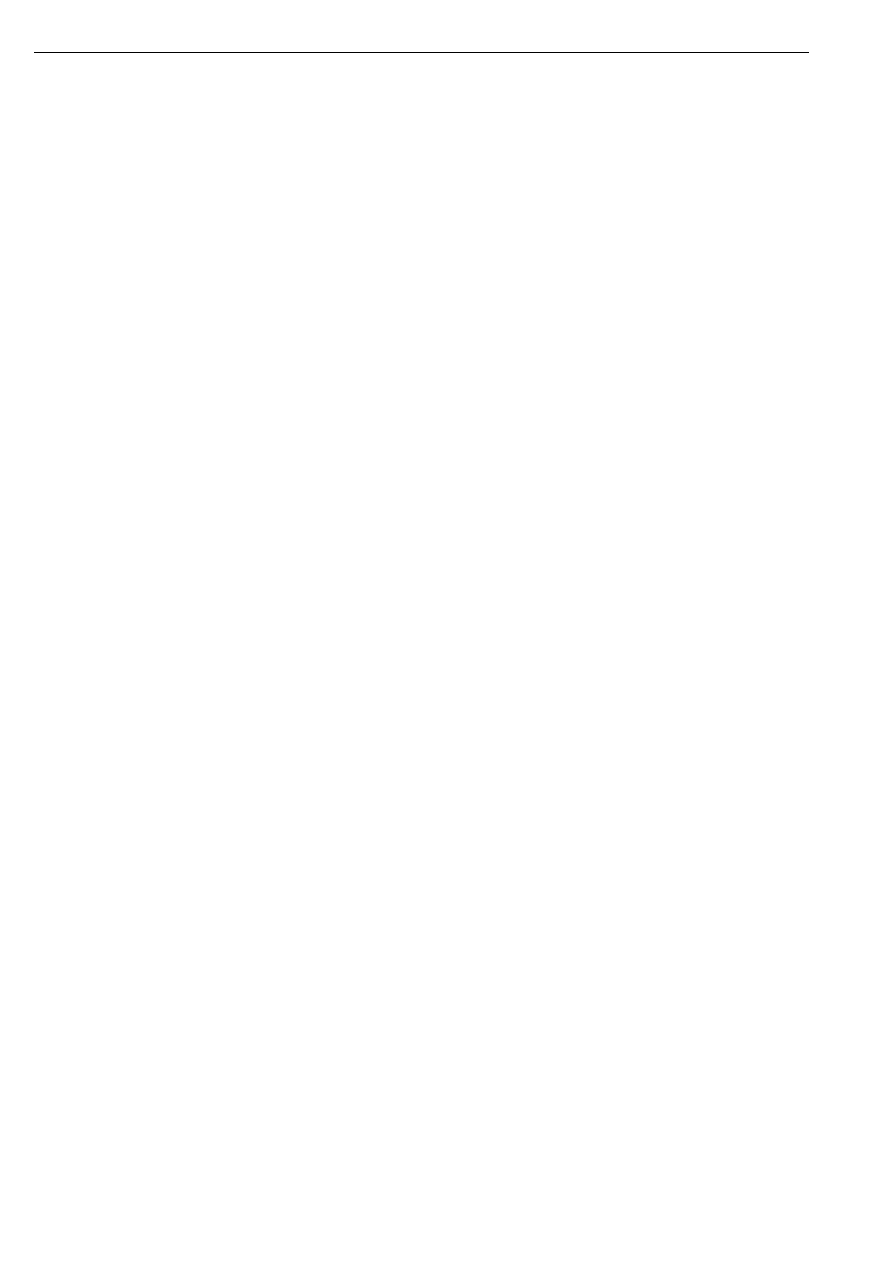
Identyfikacja wersji jednostki
Najlepszy sposób określenia wersji
jednostki sterującej ELC, w którą
wyposażony został pojazd polega na
sprawdzeniu, w którym miejscu znajdują się
amortyzatory. W przypadku jednostek
sterujących ELC generacji 2 tylne
amortyzatory znajdują się po zewnętrznej
stronie ramy.
Identyfikacja wersji jednostki.
Amortyzatory znajdują się po zewnętrznej
stronie ramy.
102640
Generacja 2.1A
Najprostszym sposobem określenia, czy
pojazd wyposażony jest w jednostkę
sterującą generacji 2 lub 2.1A jest
sprawdzenie tego przy pomocy programu
Scania Diagnos lub Programmer.
Informacje ogólne

8
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Opis układu
Jednostka sterująca przez cały czas
rejestruje wysokość pojazdu przy pomocy
czujników poziomu. Jeden czujnik znajduje
się z tyłu a drugi z przodu (w przypadku
pojazdów z zawieszeniem typu B).
Jeżeli wymagana jest regulacja poziomu,
jednostka sterująca przy pomocy zaworu
elektromagnetycznego dostosowuje ilość
powietrza znajdującego się w miechach.
Podczas hamowania, z przekaźnika światła
stopu do jednostki sterującej przesłany
zostaje sygnał. Jest on wysyłany w celu
uniknięcia niepotrzebnych regulacji
poziomu.
Sygnał prędkości z tachografu
wykorzystywany jest jako informacja dla
jednostki sterującej, że pojazd znajduje się
w ruchu. Podczas jazdy jednostka sterująca
ELC wykorzystuje standardowe sterowanie
i zużywa znacznie mniej powietrza niż kiedy
pojazd jest nieruchomy.
Wysokość nadwozia może zostać zmieniona
przy pomocy skrzynki sterującej. Jednostka
sterująca dostosowuje poziom (w górę lub
w dół) tak długo, jak naciśnięty jest jeden z
klawiszy regulacji poziomu.
Podnoszenie osi wleczonej i przenoszenie
ciężaru jest kontrolowane przy pomocy
czujników ciśnienia, znajdujących się w
miechu zawieszenia osi tylnej. Dzięki stałej
kontroli ciśnienia powietrza w miechach
osiągnięte zostaje optymalne rozłożenie
ciężaru i kontrola.
Rozkład ciężaru na osi
W przypadku pojazdów z wózkiem
zwrotnym i funkcją przenoszenia
obciążenia rozkład ciężaru na osi jest przez
cały czas kontrolowany przez jednostkę
sterującą przy pomocy dwóch czujników
ciśnienia. Są one rozmieszczone na każdej
osi tylnej . Czujniki mierzą ciśnienie
powietrza w miechach zawieszenia, co
umożliwia jednostce sterującej rozłożenie
ciężaru pomiędzy osiami zgodnie z
zaprogramowanymi wartościami.
Hamulec ręczny
W przypadku pojazdów posiadających
przednie hamulce sprężynowe przedni
hamulec ręczny zostaje automatycznie
zwolniony podczas przesuwania ciężaru na
tył pojazdu lub podczas podnoszenia osi
wleczonej i przenoszenia obciążenia.
Zwolnienie hamulca odbywa się przez
otwarcie przez jednostkę sterującą zaworu
napełniającego cylindry hamulca ręcznego
powietrzem. Zapobiega to powstaniu
niepożądanego obciążenia mogącego
doprowadzić do wygięcia ramy podczas
podnoszenia i opuszczania pojazdu.
Działanie funkcji zwalniania hamulca
ręcznego zostanie przerwane w
poniższych przypadkach:
• Błąd tachografu rozpoznany przez
jednostkę sterującą.
•
Jednostka sterująca otrzymała sygnał
prędkości.
•
Naciśnięty jest klawisz Stop w skrzynce
sterującej.
•
Osiągnięty został normalny poziom
jezdny.
•
Osiągnięty został poziom dla jednostek
M1 lub M2.
•
Podnoszenie lub opuszczanie osi
wleczonej zostało zakończone.
•
Podnoszenie / opuszczanie osi
wleczonej zostało przerwane przy
użyciu skrzynki sterującej.
Podczas trybu czuwania użyty został
hamulec ręczny.
Przed zakończeniem kalibracji jednostki
sterującej funkcja automatycznego
zwalniania hamulca nie działa.
Opis układu

1200f13o.mkr
©
Scania CV AB 1999, Sweden
9
Poziom jezdny
Normalny
Jest to poziom na jakim odbywa się
standardowa jazda pojazdem. Jeżeli pojazd
nie znajduje się na normalnym poziomie
jezdnym, zapalona zostanie lampka usterki
poziomu.
Wysokość pojazdu zostanie automatycznie
ustawiona na normalny poziom jezdny po
naciśnięciu zielonego przycisku skrzynki
sterującej, które poprzedzone zostało
naciśnięciem przycisku podnoszenia lub
opuszczania (patrz część poświęcona
skrzynce sterującej).
Normalny poziom jezdny zostaje
zaprogramowany w jednostce sterującej
podczas kalibracji poziomu. Kalibracja
musi zostać przeprowadzona za każdym
razem, gzy wymieniana jest jednostka
sterująca, czujnik ciśnienia lub czujnik
poziomu.
Jeżeli poziom pojazdu zmienia się podczas,
gdy wyłączone jest napięcie rozruchowe,
np. z powodu nieszczelności, po włączeniu
napięcia pojazd nie przyjmie normalnego
poziomu jezdnego. W tym przypadku
normalny poziom jezdny musi zostać
ustawiony przy pomocy skrzynki sterującej.
Podniesiony
Jeżeli zażądane zostało podniesienie osi
wleczonej lub przeniesienie obciążenia,
normalny poziom jezdny zostanie
zmieniony na podniesiony dla osi tylnej. W
momencie dostawy pojazdu jednostka
sterująca jest zaprogramowana na 65 mm
dla funkcji podnoszenia osi wleczonej i na
20 mm dla przenoszenia obciążenia
(wartości mierzone przez czujnik poziomu
na osi tylnej. Wartości te mogą zostać
zmienione na życzenie klienta przy pomocy
programu Scania Programmer 2, wersji 2.02
lub późniejszej.
Tymczasowy
Tymczasowy poziom jezdny może zostać
ustawiony przy pomocy dodatkowego
przełącznika znajdującego się w kabinie.
Funkcja ta jest przydatna w przypadku, gdy
na krótki okres czasu wymagane jest
ustawienie wyższego lub niższego poziomu
jezdnego.
Na przykład podczas sterowania dźwigiem
przy pomocy tej funkcji można całkowicie
opróżnić miechy.
Przełącznik sygnału należy podłączyć do
styku 19 jednostki sterującej.
Następnie poziom tymczasowy ustawiany
jest przy pomocy programu Scania
Programmer 2, wersji 2.02 lub późniejszej.
Patrz Opis czynności serwisowych.
Funkcja ta jest standardowa dla niektórych
typów pojazdów.
Dla umocowanego pojazdu
Podczas zabezpieczania pojazdu na
pokładzie promu przy pomocy skrzynki
sterującej pojazd należy obniżyć aż do
poziomu zderzaków. Pojazd pozostaje na
tym poziomie po odłączeniu napięcia
rozruchowego.
Opis układu

10
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Kontrola
Szybka kontrola
Jeżeli pojazd nie jest w ruchu, a napięcie
rozruchowe jest włączone, jednostka
sterująca ELC sprawdza poziom co
1,5 sekundy. Jest to tak zwana szybka
kontrola. Zapewnia to utrzymanie przez
pojazd ustalonego poziomu podczas
załadunku i rozładunku.
Szybka kontrola aktywna jest również w
trybie czuwania.
Jazda przy szybkiej kontroli
Szybka kontrola zostaje zazwyczaj
przerwana po wykryciu przez jednostkę
sterującą sygnału prędkości z tachografu.
W momencie dostawy pojazdu jednostka
sterująca jest zaprogramowana na
przerwanie szybkiej kontroli przy prędkości
15 km/h w przypadku pojazdów 4x2 oraz
przy prędkości 0 km/h w przypadku innych
pojazdów.
Przy pomocy programu Scania Programmer
2 możliwy jest wybór ograniczenia
prędkości (0, 15 km/h), poniżej której
jednostka sterująca uruchomi szybką
kontrolę.
W przypadku pojazdów 4x2 ustawienia te
nie mogą być zmieniane.
Generacja 2.1A
W jednostkach sterujących generacji 2.1A
limit prędkości dla szybkiej kontroli może
zostać ustawiony na 0, 15 lub
100 km/h.
W przypadku pojazdów 4x2 wybrana może
zostać prędkość 15 lub 100 km/h.
Prędkość 100 km/h oznacza w praktyce
brak limitu.
Standardowa kontrola
Podczas jazdy jednostka sterująca ELC
wykorzystuje standardowe sposoby
kontroli, sprawdzając i regulując poziom co
minutę. Dzięki temu nie jest
przeprowadzana niepotrzebna kontrola
poziomu podczas skręcania lub
przyspieszania. Jeżeli wykorzystywana jest
standardowa kontrola, jednostka ELC
zużywa odpowiednio mniej powietrza niż
jednostka mechaniczna zawieszenia
pneumatycznego.
Hamowanie
Podczas hamowania przekaźnik światła
stopu przesyła sygnał do jednostki
sterującej, który powoduje całkowite
przerwanie kontroli poziomu. Zabezpiecza
to przed regulacją poziomu na skutek
zmian spowodowanych hamowaniem.
Opis układu
1200f13o.mkr
©
Scania CV AB 1999, Sweden
11
Sterowanie i działanie
Pojazdy z osią wleczoną
Przełącznik podnośnika osi wleczonej i
przenoszenia obciążenia
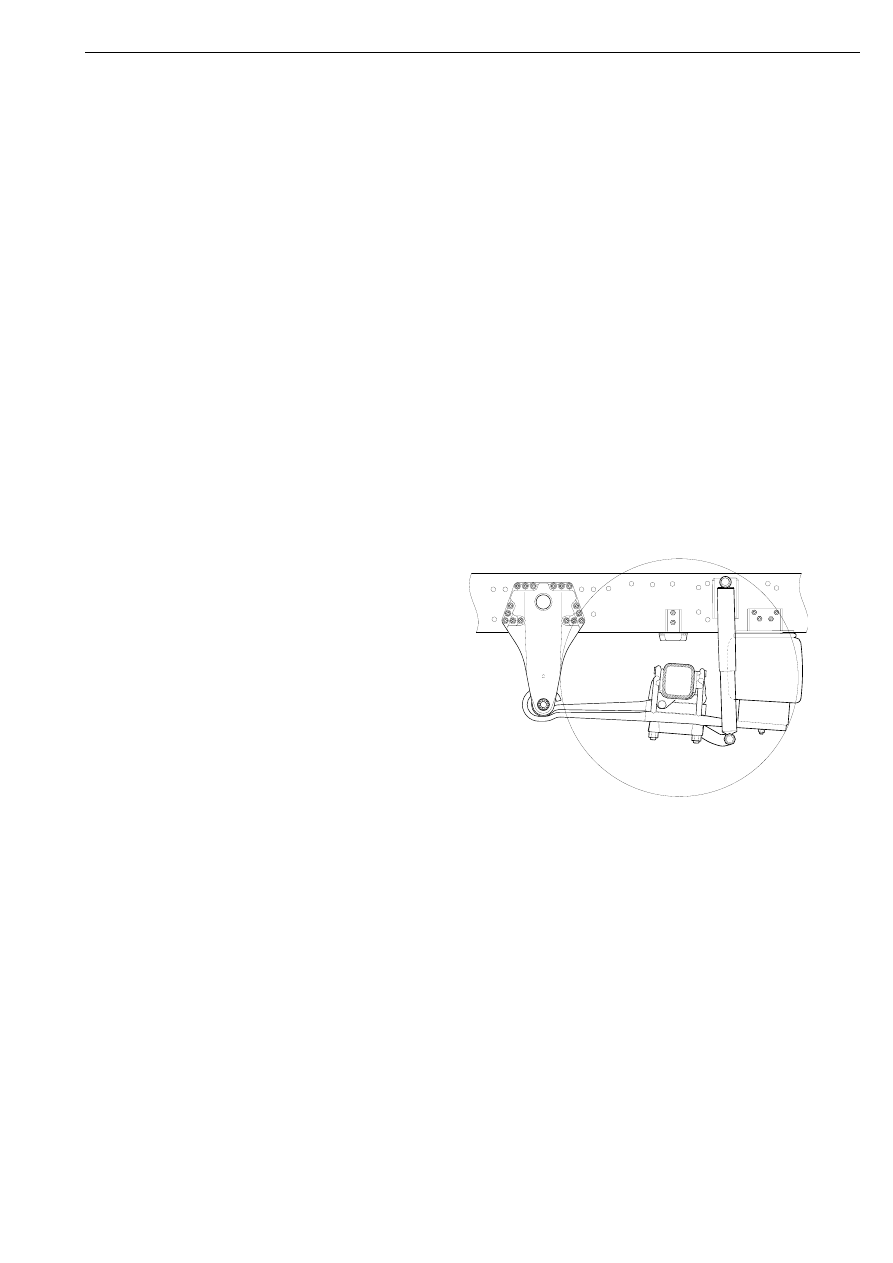
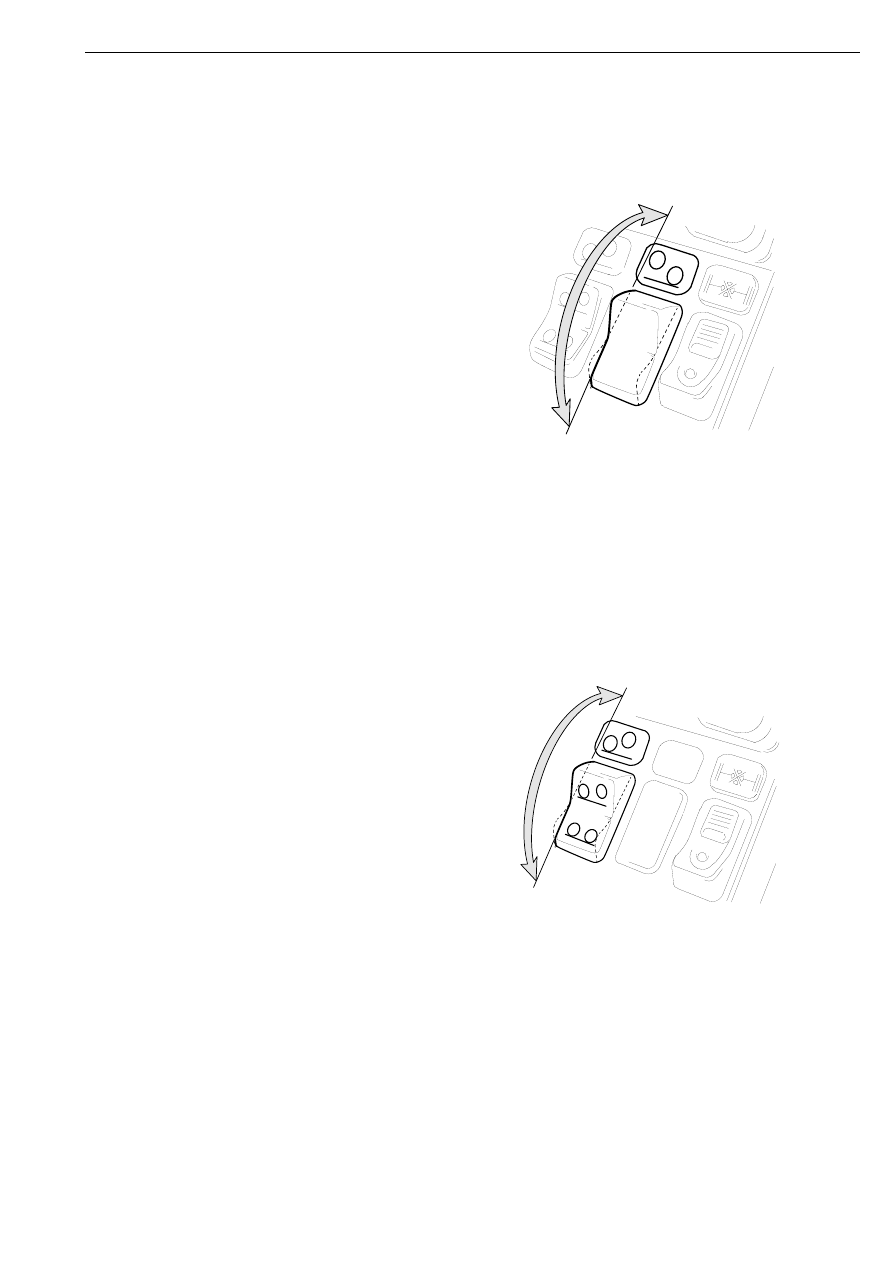
Na tablicy przyrządów znajduje się
trójpozycyjny przełącznik (S 105) służący
do obsługi osi wleczonej.
Przełącznik
Przełącznik trójpozycyjny (S 105)
1
2
3
104579
Jeżeli przycisk znajduje się w położeniu
środkowym, oś wleczona jest podniesiona.
Aby obniżyć oś, przycisk musi znaleźć się w
najniższym ustalonym położeniu.
Jeżeli przycisk znajduje się w górnym,
sprężynującym położeniu, uruchamiane jest
przenoszenie obciążenia.
Starsza konfiguracja:
Jeżeli zażądane zostało podniesienie osi
wleczonej lub przeniesienie obciążenia,
lampka połączona z przyciskiem zostanie
zapalona. Lampka zgaśnie po wciśnięciu
przycisku do końca.
Nowa konfiguracja:
Lampka przycisku świeci się, jeżeli
uruchomione zostanie podnoszenie osi
wleczonej, a gaśnie, gdy uruchomione
zostanie obniżanie. Lampka sygnalizuje
zezwolenie jednostki sterującej na
podniesienie osi wleczonej.
Podnoszenie osi wleczonej
Po zażądaniu podniesienia osi wleczonej z
miechów zawieszenia osi wleczonej
spuszczone zostaje powietrze. Oś wleczona
zostaje podniesiona pod warunkiem, że nie
zostanie przekroczone maksymalne,
dopuszczalne obciążenie osi tylnej, a w
układzie dostępne jest wystarczające
ciśnienie. Lampka przełącznika zapali się.
Przed ponowną próbą podniesienia osi
wleczonej, przycisk musi zostać wciśnięty do
swojego najniższego położenia.
Jeżeli podczas załadunku przekroczone
zostanie maksymalne, dopuszczalne
obciążenie osi tylnej, a oś wleczona będzie
podniesiona, zostanie ona automatycznie
obniżona. Automatyczne opuszczanie może
zostać wyłączone przy pomocy Scania
Programmer 2 przez wybór funkcji ręcznego
obniżania podniesionej osi.
Maksymalne, dopuszczalne obciążenie osi
tylnej jest inne w zależności od kraju z
powodu różnic w przepisach i jest
programowane przy pomocy programu
Scania Programmer 2.
Sterowanie i działanie

12
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Procedura podnoszenia osi wleczonej
Po zażądaniu podniesienia osi:
1
Na podstawie ustalonego obciążenia
maksymalnego jednostka centralna decyduje,
czy podniesienie osi jest możliwe. Jeżeli
podniesienie osi jest niemożliwe, proces zostaje
zakończony. Jeżeli jest możliwe, proces
kontynuowany (patrz punkt 2).
2
Do miechów zawieszenia osi tylnej zostaje
wpompowane pod ciśnieniem powietrze w celu
podniesienia poziomu. Procedura wykonywana
jest etapami.
3
Miechy podnoszące oś wleczoną są częściowo
wypełnione.
4
Miechy zawieszenia osi wleczonej są opróżniane.
5
Kontynuowane jest napełnianie miechów
podnoszących oś wleczoną.
6
Kontynuowane jest opróżnianie miechów
zawieszenia osi wleczonej.
7
Miechy podnoszące oś wleczoną są ponownie
napełniane.
8
Jednostka sterująca sprawdza, czy ciśnienie w
miechach zawieszenia osi wleczonej wzrasta.
Wzrost ciśnienia oznacza trwanie procesu
podnoszenia. Oś wleczona nie znajduje się
jeszcze w górnym położeniu.
9
Jeżeli ciśnienie wzrasta, proces podnoszenia jest
kontynuowany (patrz punkt 7). Jeżeli nie,
podnoszenie jest zakończone.
Wskazówka: Podczas gdy oś wleczona znajduje się w
górnym położeniu, co pięć minut miechy
podnoszące napełniane są ponownie w celu
wyrównania strat spowodowanych
nieszczelnościami.
Przenoszenie obciążenia
Wszystkie typy pojazdów posiadających oś wleczoną
standardowo wyposażone są w funkcję przenoszenia
obciążenia. Z powodu różnic w przepisach funkcja
przenoszenia obciążenia dostępne jest w dwóch
różnych konfiguracjach, z limitem czasowym lub
bez. Zaprogramowany może również zostać limit
dopuszczalnej prędkości podczas przenoszenia
obciążenia. Funkcje te są programowane przy
pomocy programu Scania Programmer 2.
Szczegółowe informacje można znaleźć w części
Przenoszenie obciążenia.
Sterowanie i działanie
1200f13o.mkr
©
Scania CV AB 1999, Sweden
13
Pojazdy z dwiema osiami wleczonymi
W pojazdach 8x2/4 z zawieszeniem typu A
lub B oraz dwiema osiami wleczonymi,
przednia oś wleczona jest sterowana przy
pomocy oddzielnego przełącznika
znajdującego się na tablicy przyrządów.
Funkcja ta jest obsługiwana ręcznie i
niezależnie od jednostki sterującej ELC.
Przełącznik steruje dwoma zaworami
elektromagnetycznymi (V71 i V72). Zawór
V72 opróżnia miechy zawieszenia w tym
samym czasie, gdy zawór V71 napełnia
miechy podnoszące osi wleczonej podczas
podnoszenia osi.
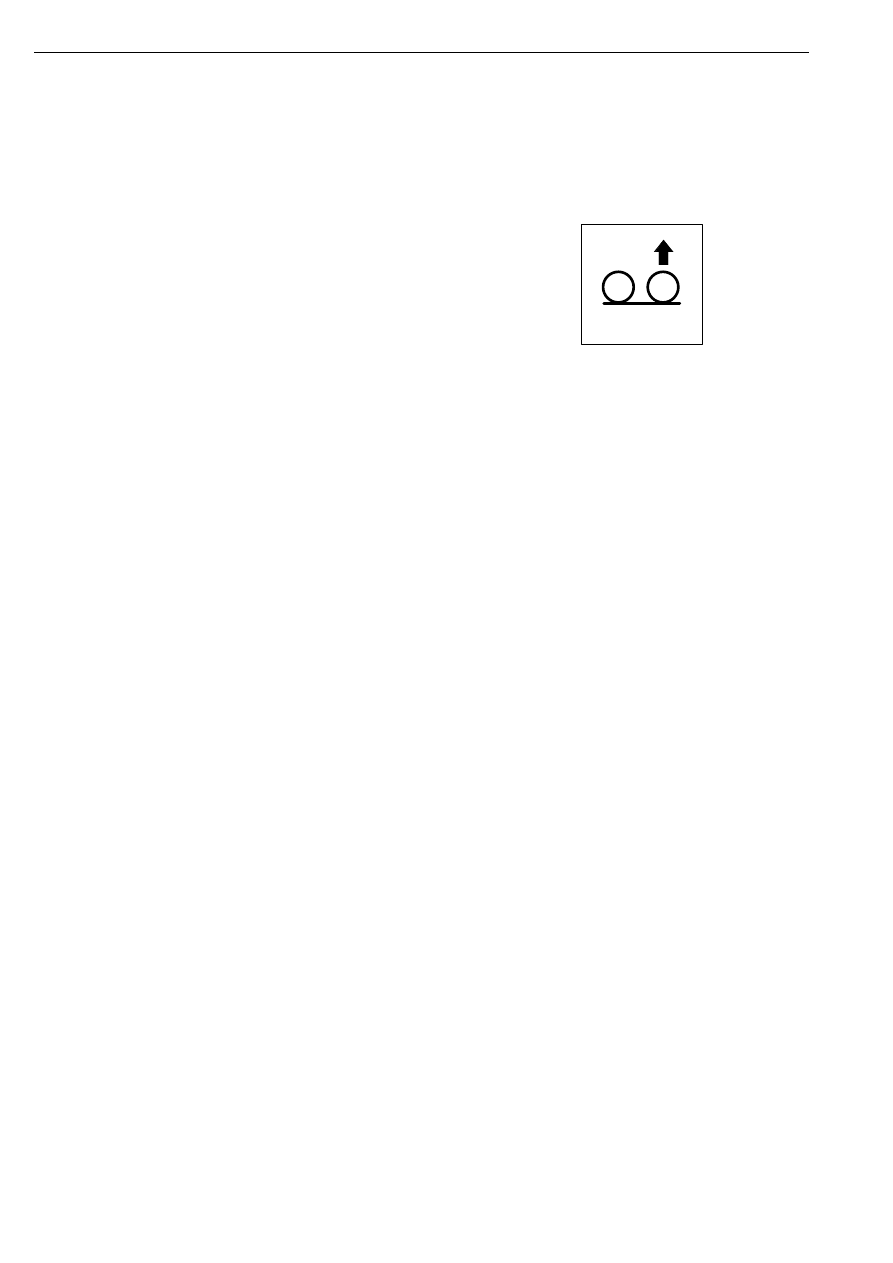
Przełącznik
Dwupozycyjny przełącznik z ustalonymi
położeniami (S 11).
106 232
1
2
Zawory znajdują się po lewej stronie na
poprzecznicy przed miechami
podnoszącymi przedniej osi wleczonej.
Pojazdy z wózkiem zwrotnym
posobnym
Pojazdy z wózkami zwrotnymi posobnymi
posiadają funkcję przenoszenia obciążenia
lub nie. Przenoszenie obciążenia może
odbywać się z limitem czasowym lub bez.
Przełącznik
W przypadku pojazdów z wózkiem
zwrotnym posobnym dostępne są dwie
konfiguracje przełącznika. Stosowany jest
dwupozycyjny przełącznik w przypadku
pojazdów z przenoszeniem obciążenia
ograniczanym czasowo(S 106) i
trójpozycyjny (S 108) w przypadku
pozostałych pojazdów.
Przełącznik
Przełącznik dwupozycyjny (S 106)
1
2
Jeżeli przycisk nie zostanie naciśnięty, nie
zostanie uruchomione przenoszenie
obciążenia i rozkład ciężaru dla wózka
zwrotnego odbywa się zgodnie ze
specyfikacją.
Blokada mechanizmu różnicowego
podczas przenoszenia obciążenia
Do czasu uruchomienia blokady
mechanizmu różnicowego wózka nie jest
możliwe włączenie funkcji przenoszenia
obciążenia. Szczegółowe informacje można
znaleźć się w części Przenoszenie
obciążenia.
Sterowanie i działanie
14
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Przenoszenie obciążenia
Przenoszenie obciążenia jest
wykorzystywane w celu chwilowego
zwiększenia obciążenia przedniej części osi
tylnej np. dla uzyskania lepszej trakcji.
Po zażądaniu przeniesienia obciążenia
miechy osi wleczonej lub tylniej osi
zawieszenia są stopniowo opróżniane. Jeżeli
podczas przenoszenia obciążenia nie
zostanie osiągnięta wartość maksymalnego
obciążenia osi tylnej, miechy zawieszenia
osi wleczonej / osi tylnej zostaną całkowicie
opróżnione.
Każdy kraj posiada własne przepisy
dotyczące maksymalnego, dopuszczalnego
obciążenia osi tylnej oraz przenoszenia
obciążenia. Muszą one zostać uwzględnione
podczas programowania jednostki
sterującej.
Jeżeli uruchomione zostało przenoszenie
obciążenia, skrzynka sterująca nie działa do
momentu naciśnięcia na skrzynce sterującej
przycisku stop i przerwania operacji
przenoszenia obciążenia.
Lampka kontrolna przenoszenia obciążenia
zapali się, gdy zażądane zostało
przeniesienie obciążenia i pozostanie
zapalona przez cały czas trwania operacji.
Lampka kontrolna przenoszenia
obciążenia
12_0751
Generacja 2.1A
Przenoszenie obciążenia w przypadku
jednostek generacji 2.1A nie ma wpływu na
pracę skrzynki sterującej. Dzięki temu
istnieje możliwość korzystania ze skrzynki
sterującej nawet podczas przenoszenia
obciążenia. Dodatkowo, funkcja
przenoszenia obciążenia może zostać
włączona, gdy aktywna jest skrzynka
sterująca.
Jednostka sterująca posiada również
funkcję pamięci. Po wyłączeniu i
ponownym włączeniu napięcia
rozruchowego, w pamięci jednostki
sterującej pozostaje informacja o włączonej
funkcji przenoszenia obciążenia w
momencie przerwania zasilania. W takim
przypadku przenoszenie obciążenia
zostanie rozpoczęte automatycznie .
Nastąpi to jednak tylko w przypadku, gdy
uruchomione zostało pełne przeniesienie
obciążenia z podnoszeniem osi wleczonej.
Z ograniczeniem czasowym
Jeżeli przycisk znajduje się w górnym
położeniu, przenoszenie obciążenia
zostanie uruchomione na90 sekund i na
tablicy przyrządów zapali się lampka
przenoszenia obciążenia. Zapali się również
lampka przycisku (szczegółowe informacje
można znaleźć w części Sterowanie i
działanie, w akapicie poświęconym
przełącznikowi podnoszenia osi wleczonej).
Przenoszenie obciążenia odbywa się zawsze
do zaprogramowanego, dopuszczalnego
poziomu.
Po 90 sekundach i zakończeniu cyklu
przenoszenia obciążenia lampka gaśnie.
Ponowne przenoszenie obciążenia nie może
zostać rozpoczęte wcześniej niż 50 sekund
po zakończeniu poprzedniej operacji tego
typu.
W przypadku pojazdu z wózkiem zwrotnym
posobnym do czasu, gdy nie zostanie
uruchomiona blokada mechanizmu
różnicowego, nie jest możliwe
uruchomienie przenoszenia obciążenia.
Przenoszenie obciążenia

1200f13o.mkr
©
Scania CV AB 1999, Sweden
15
Bez ograniczenia czasowego
W przypadku pojazdów wyposażonych w
funkcję przenoszenia obciążenia bez limitu
czasowego może ono być kontynuowane w
sposób ciągły. Jeżeli przycisk podnoszenia
osi wleczonej znajduje się w górnym
położeniu, przenoszenie obciążenia
zostanie rozpoczęte i zapali się na tablicy
przyrządów lampka przenoszenia
obciążenia.
Przenoszenie obciążenia będzie
kontynuowane tak długo, jak długo
naciśnięty będzie przycisk. Po zwolnieniu
przycisku przenoszenie obciążenia zostaje
zakończone, a uzyskany poziom utrzymany.
Jeżeli przycisk zostanie naciśnięty
ponownie, przenoszenie obciążenia będzie
kontynuowane do momentu osiągnięcia
maksymalnego obciążenia osi tylnej. Jeżeli
obciążenie maksymalne nie zostanie
osiągnięte po całkowitym opróżnieniu
miechów zawieszenia osi wleczonej, oś
wleczona zostanie podniesiona, pod
warunkiem, że jednostka sterująca została
zaprogramowana na przenoszenie
obciążenia z podniesieniem osi wleczonej.
Po wciśnięciu przycisku do jego najniższego
położenia i przytrzymaniu przenoszenie
obciążenia jest zmniejszane do momentu
zgaśnięcia lampki na tablicy przyrządów.
Przenoszenie obciążenia zostaje
zakończone.
Jeżeli przed zgaśnięciem lampki
przenoszenia obciążenia przycisk znajdzie
się w położeniu środkowym, zmniejszanie
przenoszenia ciężaru zostanie zatrzymane i
utrzymany zostanie bieżący rozkład ciężaru
na wózku.
Proces przenoszenia obciążenia
Po zażądaniu przeniesienia obciążenia:
1
Do miechów zawieszenia osi tylnej
zostaje wpompowane pod ciśnieniem
powietrze w celu podniesienia poziomu.
Zapali się lampka przenoszenia
obciążenia.
2
Miechy zawieszenia osi wleczonej
zostają opróżnione. Następnie miechy
zawieszenia osi tylnej zostają ponownie
napełnione sprężonym powietrzem w
celu osiągnięcia prawidłowego poziomu
jezdnego.
3
Powtarzany jest punkt 2 aż do momentu
osiągnięcia określonej wartości
maksymalnego obciążenia osi tylnej
podczas przenoszenia obciążenia.
4
Jeżeli cały ciężar został przeniesiony na
oś tylną przed osiągnięciem
maksymalnej, dopuszczalnej wartości
obciążenia osi tylnej, podczas
przenoszenia obciążenia uruchomione
zostanie podnoszenie osi wleczonej,
pod warunkiem, że jednostka sterująca
została zaprogramowana na
przenoszenie obciążenia z
podnoszeniem osi wleczonej. Dalsze
informacje można znaleźć w części
Procedura podnoszenia osi wleczonej.
Wskazówka: Punkt 4 nie dotyczy
pojazdów posiadających funkcję
przenoszenia obciążenia z
ograniczeniem czasowym.
Wskazówka: Podczas przenoszenia
obciążenia może na chwilę zapalić się
lampka usterki poziomu. Lampka zgaśnie
po osiągnięciu prawidłowego poziomu.
Ograniczenie prędkości
W celu zachowania zgodności z lokalnymi
przepisami, przykładowo dla pojazdów
6x2/4 istnieje możliwość zaprogramowania
maksymalnej, dopuszczalnej prędkości
podczas przenoszenia obciążenia.
Ograniczenie to jest programowane przy
pomocy programu Scania Programmer w
wersji 2.02 lub następnych, powoduje
przerwanie operacji przenoszenia
obciążenia przy przekroczeniu przez pojazd
prędkości 25 km/h.
Przenoszenie obciążenia
16
©
Scania CV AB 1999, Sweden
1200f13o.mkr
Konfiguracja
Grupy konfiguracji
Pojazdy z jednej grupy konfiguracji
posiadają w większości to samo
wyposażenie. Są trzy różne grupy
konfiguracji pojazdów:
•
Pojazdy bez funkcji przenoszenia
obciążenia: 4x2, 6x4 i 8x4.
•
Pojazdy posiadające funkcję
przenoszenia obciążenia: 6x4 i 8x4.
•
Pojazdy z osią wleczoną i opcją
przenoszenia obciążenia: 6x2, 6x2/4,
6x2*4, 8x2, 8x2*6 i 8x2/4.
Dodatkowo pojazdy dostępne są z
zawieszeniem typu A lub B.
Grupy te wykorzystywane są przez program
Scania Diagnos 2 w celu identyfikacji
pojazdów.
Generacja 2.1A
Nowa wersja jednostki sterującej nie
wykorzystuje grup konfiguracji, ponieważ
dokładna konfiguracja kół przechowywana
jest w pamięci jednostki.
Zamówienie S
Pojazdy wyprodukowane na zamówienie S
mogą posiadać konfigurację kół nie
obsługiwaną przez program Scania
Programmer 2 (SP2). Pojazdy te muszą
zostać zaprogramowane z jedną z
konfiguracji kół obsługiwanych przez
program SP2. Bardzo ważne jest, aby
wybrana została prawidłowa konfiguracja
kół. W karcie podwozia znajduje się
informacja, jaką konfigurację kół należy
zastosować podczas programowania
pojazdów wyprodukowanych na
zamówienie S.
Inne konfiguracje
W połączeniu z jednostką ELC gen. 2
dostępne są trzy alternatywne konfiguracje
układu sprężonego powietrza.
Wystąpić mogą pewne ograniczenia
dotyczące kombinacji konfiguracji układów
sprężonego powietrza.
Podstawowa
•
Zawieszenie typu A lub B.
Specyfikacja dla konfiguracji
podstawowej:
•
Ciśnienie układu 9,3 bara.
•
Brak dodatkowych zbiorników
powietrznych.
Z szybką kontrolą
Opcja szybkiej kontroli dostępna jest dla
pojazdów posiadających:
•
Zawieszenie typu A lub B.
Specyfikacja dla konfiguracji z szybką
kontrolą:
•
Ciśnienie układu 12,2 bara.
•
2 dodatkowe zbiorniki powietrza.
Z obsługą obciążenia
Obsługa obciążenia dostępna jest w
przypadku pojazdów posiadających:
•
Zawieszenie typu B.
•
Konfigurację kół 4x2, 6x2, 6x4 oraz
6x2*4.
Specyfikacja dla konfiguracji z obsługą
obciążenia:
•
Ciśnienie układu 12,2 bara.
•
4 dodatkowe zbiorniki powietrza (4x2).
•
6 dodatkowych zbiorników powietrza
(6x2, 6x4 i 6x2*4).
Wystąpić mogą pewne ograniczenia w
powyższych danych z uwagi na rozstaw osi
i wysokość podwozia.
Konfiguracja
1245f13o.mkr
©
Scania CV AB 1999, Sweden
17
Skrzynka sterująca
Działanie
Skrzynka sterująca pozwala na
podniesienie lub obniżenie pojazdu do
wymaganego poziomu. Posiada ona
oddzielny mikroprocesor. Skrzynka
sterująca komunikujen się z jednostką
sterującą przy pomocy sygnałów cyfrowych.
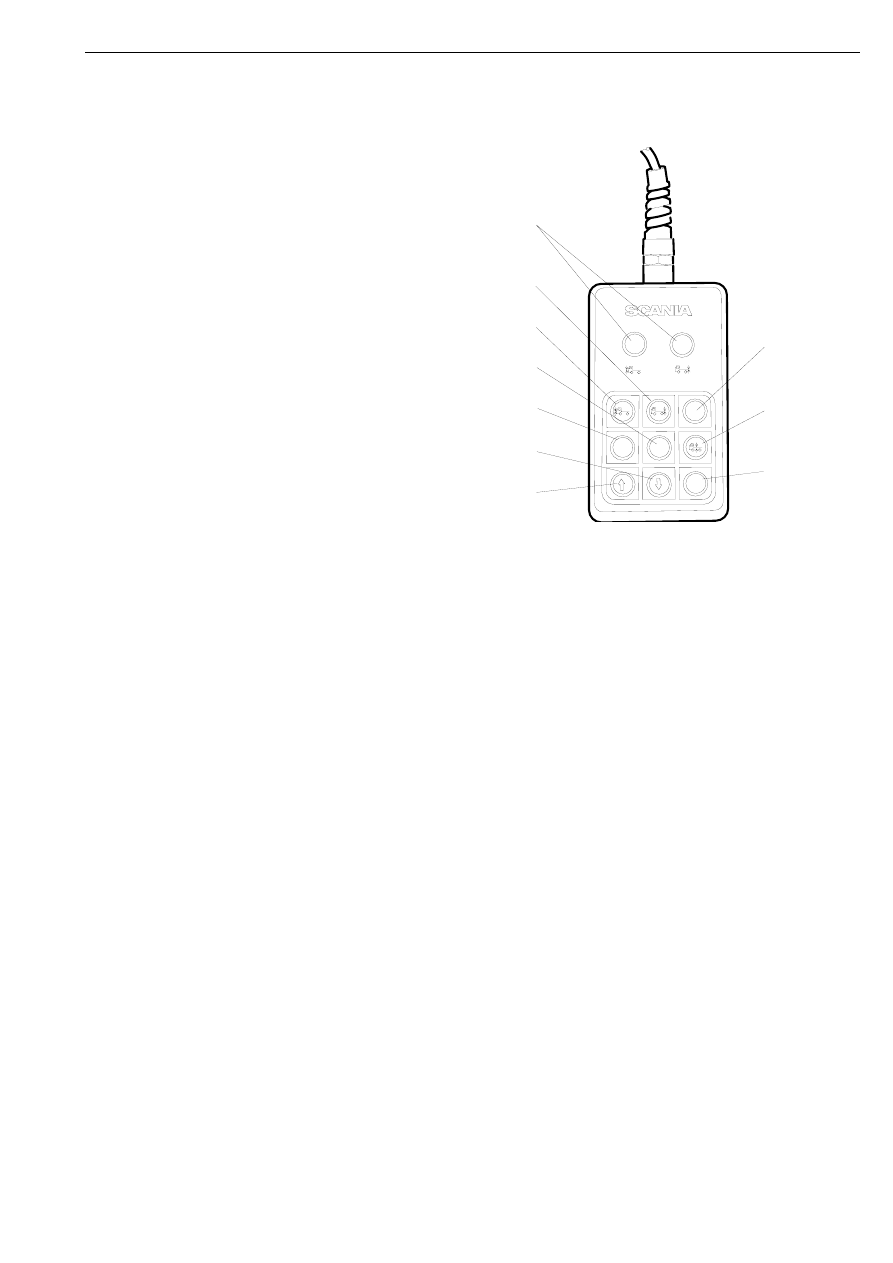
Na skrzynce sterującej znajduje się dziewięć
przycisków oraz dwie lampki. Lampka
znajdująca się po lewej stronie wskazuje,
czy aktywny jest przycisk (2), natomiast
lampka po prawej stronie wskazuje, czy
aktywny jest przycisk (3) (patrz rysunek).
Przycisk (4) nie jest wykorzystywany.
Przyciski i lampki skrzynki sterującej.
M1
M2
STOP
1
3
2
4
5
6
7
8
9
10
04 654
Pojazd można prowadzić, mimo iż lampki
są zapalone.
Pojazd może być prowadzony na poziomie
ustawionym ręcznie. Specjaliści z firmy
Scania zalecają, by pojazd zawsze był
prowadzony na normalnym poziomie
jezdnym.
Przyciski skrzynki sterującej.
1
Lampki wskazujące, czy przyciski (2) i
(3) (podniesiony lub opuszczony, przód
czy tył) są włączone.
2
Uruchamia funkcję: podniesienie /
opuszczenie przód.
3
Uruchamia funkcję: podniesienie /
opuszczenie tył.
4
Nie wykorzystywany.
5
M1 - pamięć zaprogramowanego
poziomu. Używać w połączeniu z
przyciskiem (2) i/lub (3).
6
M2 - pamięć zaprogramowanego
poziomu. Używać w połączeniu z
przyciskiem (2) i/lub (3).
7
Ustawienie normalnego poziomu jezdy.
Używać w połączeniu z przyciskiem (2)
i/lub (3).
8
Podnoszenie - Używać w połączeniu z
przyciskiem (2) i/lub (3).
9
Opuszczanie - Używać w połączeniu z
przyciskiem (2) i/lub (3).
10
Stop - Przerywa rozpoczętą funkcję
(5-7). Przycisk Stop jest również
wykorzystywany w celu uruchomienia
funkcji czuwania oraz podczas
programowania M1 i M2. Przerywa
zwolnienie przedniego hamulca
sprężynowego, jeśli ta funkcja jest
akurat uruchomiona.
Skrzynka sterująca
18
©
Scania CV AB 1999, Sweden
1245f13o.mkr
Pojazdy z zawieszeniem
typu A
Skrzynka sterująca pojazdów bez
pneumatycznego zawieszenia osi przedniej
nie posiada przycisku (2). Przy zamawianiu
części zamiennych wybrać skrzynkę
sterującą dla pojazdów o całkowitym
zawieszeniu pneumatycznym.
Czuwanie
Dla umożliwienia załadunku / rozładunku
przy wyłączonym zasilaniu rozruchowym
dostępna jest wbudowana funkcja
czuwania. Po jej włączeniu pojazd będzie w
dalszym ciągu przeprowadzał szybką
kontrolę i wyrównywał zmiany poziomu
przez 120 minut od momentu odłączenia
napięcia rozruchowego.
Poziom czuwania nie ma związku z żadnym
zaprogramowanym wstępnie poziomem,
ani poziomami kalibracji.
Uruchamianie trybu czuwania
Włączenie trybu czuwania następuje przez
naciśnięcie przycisku (10) skrzynki
sterującej w momencie wyłączania napięcia
rozruchowego.
Programowanie jednostek M1 i
M2
Skrzynka sterująca pozwala na
zaprogramowanie w jednostce sterującej
dwóch poziomów jazdy. Mogą to być na
przykład wysokości dwóch często
odwiedzanych punktów załadowczych.
Programowanie przebiega w następujący
sposób:
1
Nacisnąć przycisk (2) i/lub (3)
(podnoszenie/opuszczanie przód i/lub
tył).
2
Ustawić wymagany poziom przy
pomocy skrzynki sterującej.
3
Nacisnąć klawisz STOP
4
Trzymając wciśnięty klawisz STOP
nacisnąć klawisz M1 lub M2.
5
Zwolnić oba przyciski.
Programowanie poziomu zostało
zakończone, a nowy poziom został zapisany
w pamięci.
Aby wybrać jeden z zaprogramowanych
poziomów:
1
Nacisnąć przycisk (2) lub (3)
(podnoszenie lub opuszczanie, przód
lub tył).
2
Nacisnąć przycisk M1 lub M2.
Regulowanie poziomu
Podczas zmiany poziomu przy użyciu
skrzynki sterującej jednostka sterująca
sprawdza, czy poziom ustawiony z przodu i
z tyłu pojazdu jest jak najbardziej
wyrównany.
Następnie następuje żądanie regulacji
poziomu przy pomocy skrzynki sterującej.
Jednostka sterująca liczy punkty poziomu
dla przedniej i tylniej osi. Podczas regulacji
poziomu punkty te muszą zostać osiągnięte
jednocześnie. W przypadku obniżenia
przodu pojazdu lub podniesienia szybciej
niż tylnej części regulacja poziomu przodu
pojazdu zostanie przerwana, aż tył pojazdu
osiągnie ten sam poziom.
Ten równomierny sposób regulacji poziomu
jest przydatny, na przykład podczas pracy z
rozbieralną platformą.
Generacja 2.1a
Na działanie skrzynki sterującej nie ma
wpływu przenoszenie obciążenia pojazdów
generacji 2.1A. Oznacza to, że skrzynka
sterująca może być obsługiwana również
podczas przenoszenia obciążenia.
Przemieszczenie obciążenia można również
włączyć w momencie aktywacji skrzynki
sterującej.
Skrzynka sterująca

1245f02o.mkr
©
Scania CV AB 1999, Sweden
19
Układ elektryczny
Układ elektryczny
20
©
Scania CV AB 1999, Sweden
1245f02o.mkr
Jednostka sterująca
Sygnał wejściowy i wyjściowy
W przypadku jednostki sterującej ELC drugiej
generacji ta sama jednostka sterująca wykorzystywana
jest we wszystkich typach pojazdów.
Jednostka sterująca jest kontrolowana przez wiele
parametrów. W zależności od ustawień parametrów
jednostka sterująca działa w różny sposób. Aby
uzyskać poprawne zachowanie się pojazdu, bardzo
ważne jest prawidłowe zaprogramowanie jednostki
sterującej, odpowiadające bieżącej konfiguracji
pojazdu. Jednostka sterująca jest programowana przy
pomocy programu Scania Programmer 2.
Połączenia jednostki sterującej
Połączenia jednostki sterującej dla sygnałów
wejściowych i wyjściowych mają następujące funkcje.
Położenie styku na jednostce
sterującej.
18
35
9
1
104 656
Styk:
1
Napięcie zasilania (30) jednostki sterującej.
2
Przewód diagnostyczny L.
3
Sygnał wejściowy dla funkcji podnoszenia /
opuszczania osi wleczonej przy pomocy
przełącznika tablicy przyrządów. Przewód jest
oznaczony ELC3. W pojazdach starszego typu
może on być oznaczony ELC24.
4
Przewód diagnostyczny K.
5
Nie wykorzystywany.
6
Przewód sygnału z czujnika ciśnienia,
znajdującego się w miechu zawieszenia na osi
wleczonej / tylnej części osi tylnej.
7
Przewód sygnału z czujnika ciśnienia
znajdującego się w miechu zawieszenia na
przedniej części osi tylnej.
8
Nie wykorzystywany.
9
Napięcie zasilania (15) z rozrusznika.
10
Nie wykorzystywany.
11
Sygnał wyjściowy do zaworu podnoszenia /
opuszczania miechów zawieszenia na osi
przedniej.
Układ elektryczny

1245f02o.mkr
©
Scania CV AB 1999, Sweden
21
12
Sygnał wyjściowy do zaworu
podnoszenia / opuszczania miechów
zawieszenia osi wleczonej / tylnej części
osi tylnej.
13
Sygnał wyjściowy do zaworu
podnoszenia / opuszczania miechów
zawieszenia osi wleczonej.
14
Sygnał wyjściowy do zaworu
podnoszenia / opuszczania osi
wleczonej.
15
Sygnał wyjściowy do zaworu
regulacyjnego podnoszenia /
opuszczania miechów zawieszenia.
16
Sygnał wejściowy z przekaźnika światła
stopu.
17
Sygnał wejściowy przełącznika
przenoszenia obciążenia znajdującego
się na tablicy przyrządów.
18
Sygnał wyjściowy do lampki kontrolnej
przenoszenia obciążenia.
19
Sygnał wejściowy z przełącznika
tymczasowego poziomu jezdnego.
20
Sygnał regulatora czasowego ze
skrzynki sterującej. Sygnał jest wysyłany
w momencie, gdy przycisk znajdujący
się na skrzynce sterującej jest wciśnięty.
Dla jednostki sterującej konieczny jest
sygnał regulatora czasowego z styku 20
w celu dekodowania sygnału danych na
styk 21.
21
Sygnał danych ze skrzynki sterującej.
Dla jednostki sterującej konieczny jest
sygnał regulatora czasowego ze styku 20
w celu dekodowania sygnału danych na
styk 21.
22
Sygnał prędkości z tachografu.
23
Nie wykorzystywany.
24
Sygnał wejściowy ze zwarcia styków
potwierdzających blokadę mechanizmu
różnicowego.
25
Sygnał tylnego czujnika poziomu.
26
Sygnał przedniego czujnika poziomu.
27
Masa (31).
28
Nie wykorzystywany.
29
Sygnał wyjściowy do zaworu w celu
zwolnienia przednich hamulców
sprężynowych.
30
Nie wykorzystywany.
31
Nie wykorzystywany.
32
Nie wykorzystywany.
33
Sygnał wyjściowy do lampki kontrolnej
informującej o usterce układu.
34
Sygnał wyjściowy do lampki kontrolnej
informującej o usterce poziomu.
35
Starsza konfiguracja: Nie
wykorzystywane.
Nowa konfiguracja: Sygnał wyjściowy
do lampki kontrolnej przełącznika
funkcji podnoszenia osi wleczonej.
(S105).
Układ elektryczny
22
©
Scania CV AB 1999, Sweden
1245f02o.mkr
Wymiana jednostki sterującej
Z doświadczenia wiadomo, że usterki
jednostki sterującej zdarzają się rzadko.
Przed wymianą jednostki sterującej należy
sprawdzić kody usterek oraz bezpieczniki.
Podczas wymiany jednostki sterującej nowa
jednostka musi zostać zaprogramowana
zgodnie z konfiguracją pojazdu. Jednostka
sterująca jest programowana przy pomocy
programu Scania Programmer 2.
Po wymianie jednostki sterującej
wygenerowane mogą zostać kody usterek,
ponieważ jednostka sterująca nie została
jeszcze wykalibrowana zgodnie z
czujnikami poziomu i ciśnienia.
Kalibracja
Wykalibrowane fabrycznie nowe czujniki
ciśnienia i poziomu mogą się pomiędzy sobą
różnić. Różnice te są uwzględniane przez
jednostkę sterującą podczas kalibracji.
Odpowiednio, w celu prawidłowego
funkcjonowania, jednostka sterująca musi
zostać poddana kalibracji.
Kalibracja oznacza, że wartość
wygenerowana przez czujnik na konkretnym
poziomie lub przy opróżnionych miechach,
zostanie zapisana w pamięci jednostki
sterującej. Podczas procesu sterowania
wartości te zostają uwzględnione przez
jednostkę sterującą, a następnie
wyrównywane są różnice w granicach
tolerancji.
Więcej szczegółów dotyczących kalibracji
znajduje się w opisie czynności serwisowych.
Generacja 2.1A
Począwszy od jednostek sterujących
generacji 2.1A kalibracja może również
zostać przeprowadzona przy pomocy
programu Scania Programmer 2.
Aktualnie jednostki sterujące drugiej
generacji nie mogą być kalibrowane przy
pomocy komputera PC. Program SP2
zostanie w przyszłości zmodyfikowana pod
kątem obsługi tej funkcji.
Lampki kontrolne
Usterka układu
Jeśli jednostka sterująca wykryje usterkę w
układzie, użytkownik zostanie ostrzeżony
przez zapalenie lampki kontrolnej.
Lampka kontrolna
ostrzegająca o usterce
układu
W tym samym momencie generowany jest
kod usterki, który zostaje zachowany w
pamięci jednostki sterującej. Kod usterki
może zostać odczytany przy pomocy
programu Scania Diagnos 2 lub jako kod
błyskowy. Dalsze informacje na ten temat
znajdują się w części Wykrywanie i
usuwanie usterek.
Po usunięciu usterki lampka kontrolna w
większości przypadków również zgaśnie
automatycznie. Kod usterki pozostanie w
pamięci jednostki.
Układ elektryczny
1245f02o.mkr
©
Scania CV AB 1999, Sweden
23
Usterka poziomu
Jeżeli pojazd znajduje się na poziomie
różnym od kalibrowanego, normalnego
poziomu jezdnego, zapalona zostanie
lampka kontrolna informująca o
niewłaściwym poziomie.
Lampka kontrolna
informująca o usterce
poziomu
Normalny poziom jezdny jest
skalibrowanym poziomem na jaki zwykle
pojazd utrzymuje podczas jazdy.
Poziom jezdny podwyższony przez funkcję
podnoszenia osi wleczonej lub przenoszenia
obciążenia, jak również tymczasowy poziom
jezdny uzyskany przy pomocy przełącznika
może również zostać uznany za normalny
poziom jezdny. Lampka kontrolna
informująca o błędnym poziomie będzie
zapalona przez cały czas trwania operacji
zmiany poziomu, a następnie zgaśnie.
Normalny poziom jezdny jest ustawiany przy
pomocy zielonego przycisku na skrzynce
sterującej. Szczegółowe informacje znajdują
się w części Skrzynka sterująca.
Przenoszenie obciążenia
Lampka kontrolna przenoszenia obciążenia
zostaje zapalona po zażądaniu przenoszenia
obciążenia i pozostanie zapalona przez cały
czas, aż rozłożenie ciężaru na wózku nie
osiągnie ustalonej wartości.
Lampka kontrolna
przenoszenia obciążenia
Lampka gaśnie automatycznie w przypadku,
gdy przenoszenie obciążenia zostanie
przerwane ręcznie (lub zredukowane) lub
gdy wykorzystywane jest przenoszenie
obciążenia ograniczone czasowo.
Starsza konfiguracja: Lampka wbudowana w
przycisk zostanie zapalona również w
przypadku zażądania podniesienia osi
wleczonej lub przeniesienia obciążenia.
Lampka przycisku gaśnie automatycznie w
przypadku ręcznego przerwania operacji
przenoszenia obciążenia.
Nowa konfiguracja: Lampka kontrolna
przycisku jest zapalona przy podniesionej osi
wleczonej, natomiast gaśnie, gdy oś jest w
dolnym położeniu.
Lampka sygnalizuje, że oś wleczona jest
podniesiona.
Generacja 2.1A: Lampka funkcji
przenoszenia obciążenia znajdująca się na
panelu zostaje zapalona, gdy do jednostki
sterującej dotarło żądanie przeniesienia
obciążenia i zostało ono zatwierdzone.
Lampka przycisku pali się po zatwierdzeniu
przez jednostkę sterującą pełnego
przeniesienia obciążenia z podniesieniem
osi wleczonej, gaśnie natomiast po
opuszczeniu osi wleczonej.
Lampka oznacza zatwierdzenie przez
jednostkę sterującą podniesienia osi
wleczonej.
Lampka kontrolna znajdująca się na panelu
jest również zapalona, gdy przenoszenie
obciążenia stopniowo maleje i pozostanie
zapalona przez cały czas trwania operacji
przenoszenia obciążenia.
Układ elektryczny

1245f02o.mkr
©
Scania CV AB 1999, Sweden
24

1215f04o.mkr
©
Scania CV AB 1999, Sweden
25
Zawory i czujniki
Blok zaworów
elektromagnetycznych
Jednostka ELC drugiej generacji wykorzystuje do
sterowania zawieszeniem pojedynczy V54 lub
podwójny V54+V55 blok zaworów
elektromagnetycznych. Działanie bloku zaworów
różni się w zależności od konfiguracji pojazdu.
W procesie produkcyjnym firmy Scania
wykorzystywane są cztery różne bloki zaworów
elektromagnetycznych. Jedynie dwa rodzaje
bloków dostępne są jako części zamienne:
pojedynczy i podwójny.
Funkcje niektórych bloków wykorzystywanych w
procesie produkcyjnym są ograniczone, podczas
gdy bloki dostarczane jako części zamienne
posiadają wszystkie funkcje. Jeżeli zamienny blok
montowany jest w pojeździe z ograniczonymi
funkcjami, np. z zawieszeniem typu A, wyjścia,
które nie są wykorzystywane należy zaślepić.
Blok zaworów elektromagnetycznych
V54
Pojedynczy blok zaworów elektromagnetycznych
V54 wykorzystywany jest w następujących
pojazdach:
Konfiguracja kół
Funkcja przenoszenia
obciążenia
Zawory
elektromagnetyczne
4x2A
-
2
4x2B
-
3
6x4A
Nie posiada
2
6x4B
Nie posiada
3
6x4A
Posiada
3
8x4A
Nie posiada
2
8x4B
Nie posiada
3
8x4A
Posiada
3
Zawory i czujniki
26
©
Scania CV AB 1999, Sweden
1215f04o.mkr
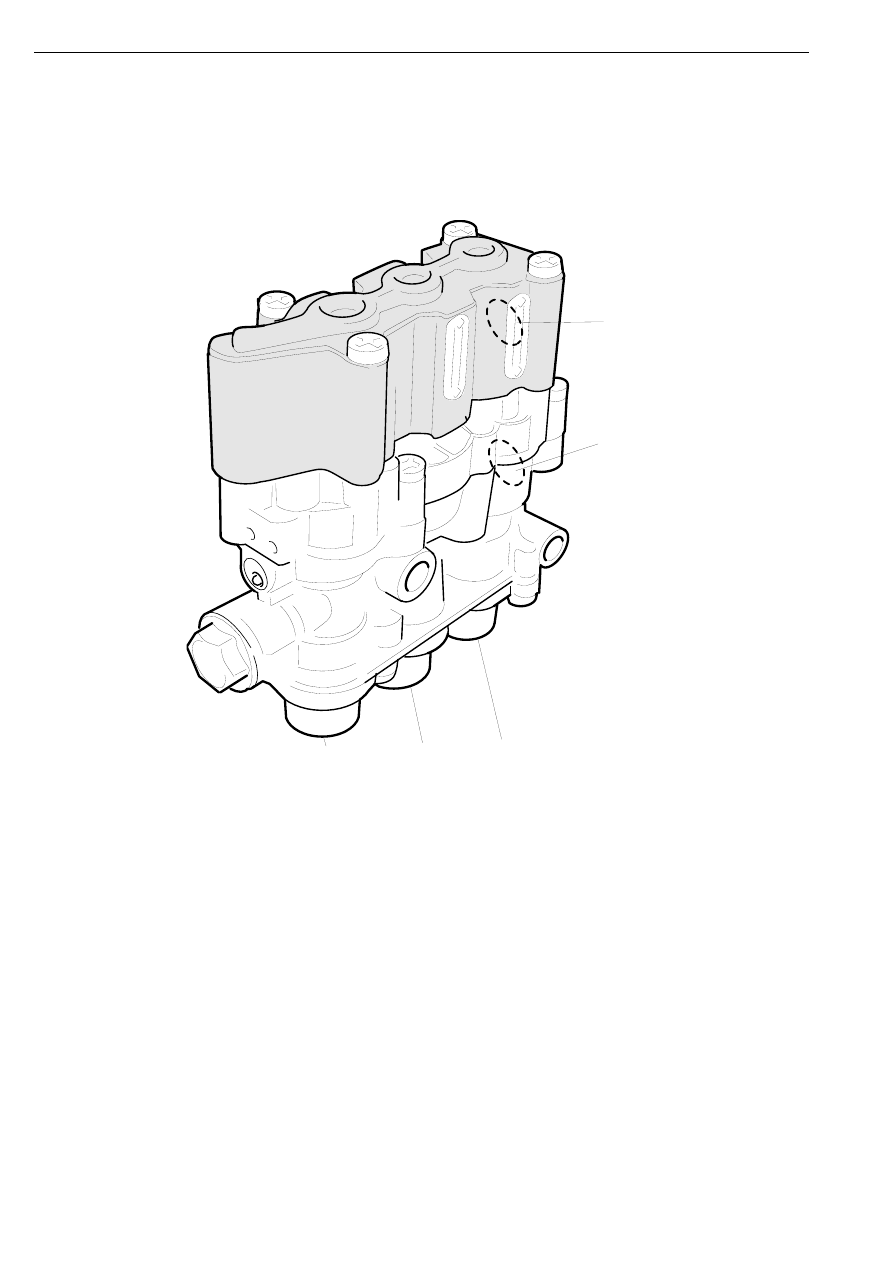
Blok zaworów elektromagnetycznych V54
1
Połączenie elektryczne
2
(3) Wyjście
3
(11/25) Zasilanie
4
(22) Powietrze sterujące miecha zawieszenia na osi
tylnej
5
(23)
Pojazdy z zawieszeniem typu B: Powietrze
sterujące miecha zawieszenia przedniego.
Pojazdy z
zawieszeniem typu A i funkcją przenoszenia
obciążenia: Powietrze sterujące miecha zawieszenia
osi tylnej
105818
1
2
3
4
5
Zawory i czujniki
1215f04o.mkr
©
Scania CV AB 1999, Sweden
27
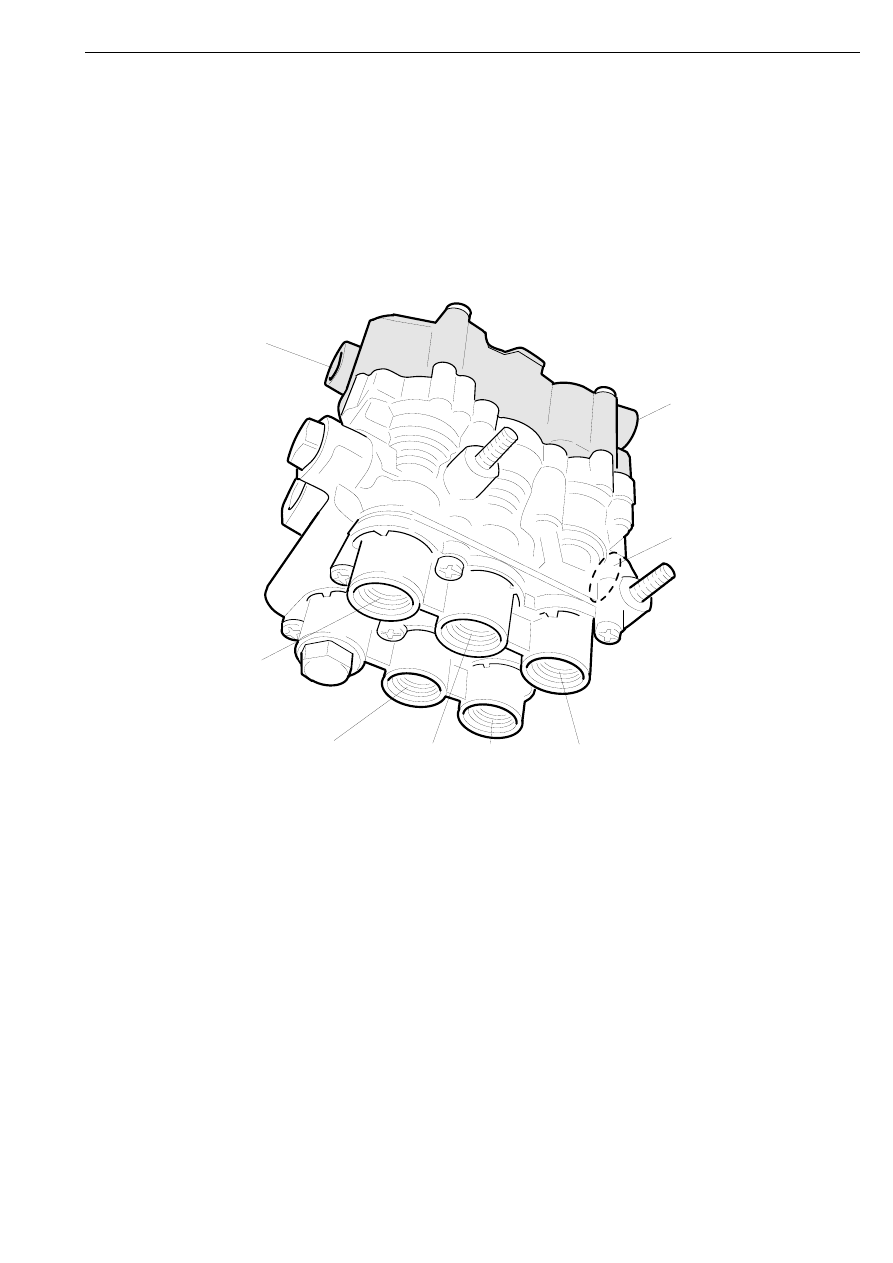
Blok zaworów elektromagnetycznych V54+V55
Podwójny blok zaworów elektromagnetycznych V54+V55 jest
wykorzystywany we wszystkich pojazdach, gdzie niewystarczający jest
pojedynczy blok zaworów elektromagnetycznych.
Blok zaworów elektromagnetycznych
1
Połączenie elektryczne V55
2
Połączenie elektryczne V54
3
(V54-23) Powietrze sterujące, wylot (patrz tabela
V54)
4
(V55-22) Powietrze sterujące, wylot (patrz tabela
V55)
5
(V54-22) Powietrze sterujące, wylot (patrz tabela
V54)
6
(V55-23) Powietrze sterujące, wylot (patrz tabela
V55)
7
(V54-11) Dopływ powietrza, wlot
8
(V54-3) Wylot
Wloty i wyloty dla V54+V55
105 817
1
2
3
4
5
6
7
8
Zawory i czujniki
28
©
Scania CV AB 1999, Sweden
1215f04o.mkr
Tabela V54
V54-3
V54-11
V54-22
V54-23
Dopływ powietrza
Wszystkie
Wylot (odprowadzanie
powietrza)
Wszystkie
Powietrze sterujące miecha
zawieszenia na osi tylnej i
przedniej osi wleczonej
8x2/4A,
8x2/4B
Powietrze sterujące miecha
zawieszenia na osi tylnej
Wszystkie
poza
powyższymi
Powietrze sterujące miecha
zawieszenia przedniego
Wszystkie, poza
6x4B i 8x4B z
funkcja
przenoszenia
obciążenia
Tabela V55
V55-22
V55-23
Powietrze sterujące miecha
zawieszenia przedniego
6x4B i 8x4B z funkcją
przenoszenia obciążenia
Powietrze sterujące miecha
do podnoszenia osi
wleczonej
Wszystkie poza powyższymi
Powietrze sterujące miecha
zawieszenia na osi wleczonej
/ osi tylnej
Wszystkie
Zawory i czujniki
1215f04o.mkr
©
Scania CV AB 1999, Sweden
29
Zawór
elektromagnetyczny
Zawór elektromagnetyczny V32
Zawór elektromagnetyczny V32 powoduje
zwolnienie hamulca ręcznego podczas
obsługi obciążenia. Jest on uruchamiany po
zażądaniu podniesienia lub opuszczenia
pojazdu w celu uniknięcia wygięcia
podwozia.
Więcej informacji znajduje się w części
Układ hamulcowy
Czujniki
Czujniki poziomu T72 i T73
Wraz jednostką sterującą ELC drugiej
generacji we wszystkich połączeniach
elektrycznych zastosowane zostały nowe,
bardziej dopasowane złącza. Są to złącza
typu bagnetowego, zgodne z normą DIN.
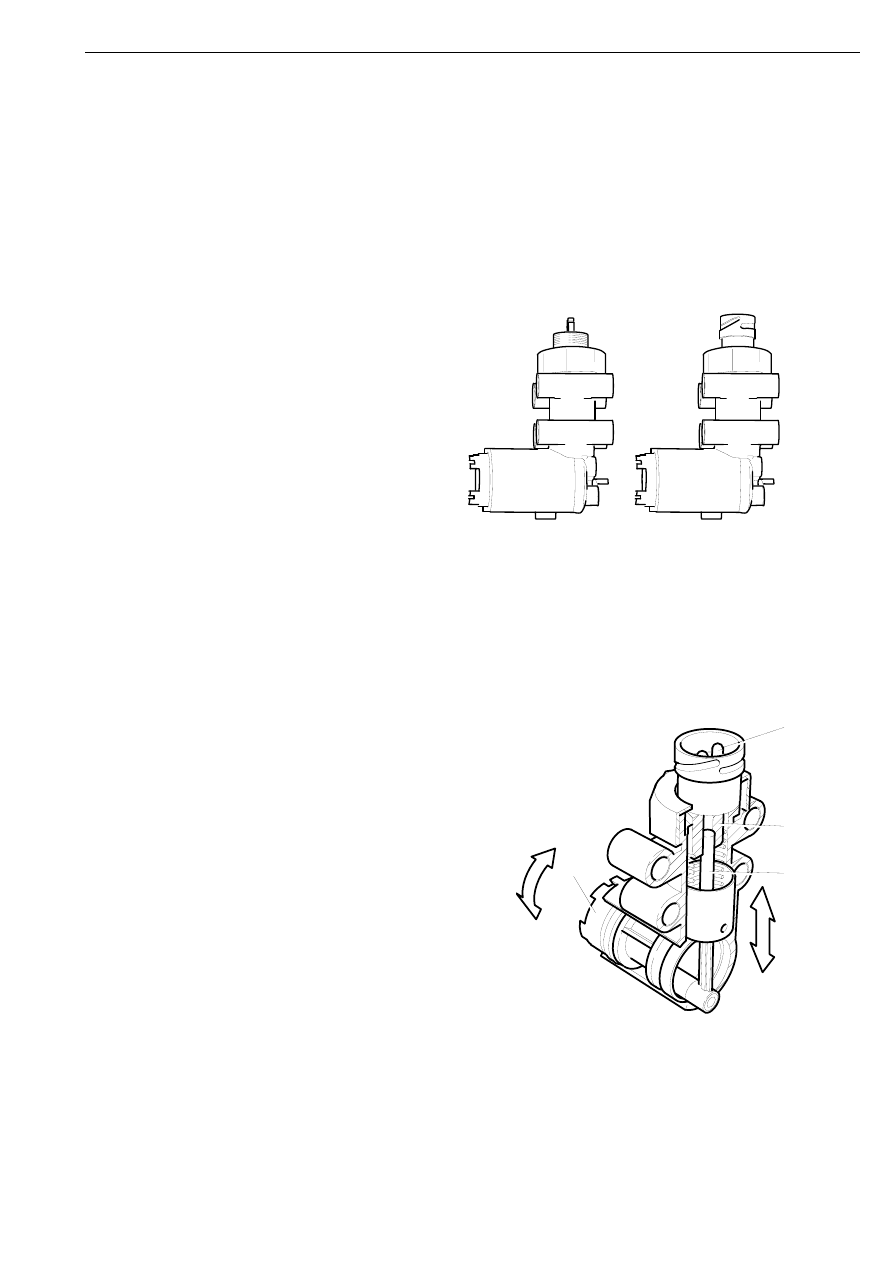
Czujnik poziomu
A Wcześniejsza konstrukcja
B Druga generacja ze złączem zgodnym z
normą DIN
102639
A
B
Czujnik poziomu
1
Złącze
2
Cewka
3
Rdzeń
4
Element ustalający dźwigni
1
2
3
4
105 827
Wysokość podwozia mierzona jest przez
czujniki indukcyjne. Czujniki poziomu
znajdują się na ramie i dokonują pomiaru
odległości pomiędzy ramą a osią.
Czujnik poziomu składa się z zamocowanej
cewki i ruchomego rdzenia. Podczas
podnoszenia lub opuszczania pojazdu rdzeń
jest wpychany do cewki albo z niej
wypychany.
Indukcyjność cewki różni się w zależności
od tego, jaka część rdzenia się w niej
znajduje.
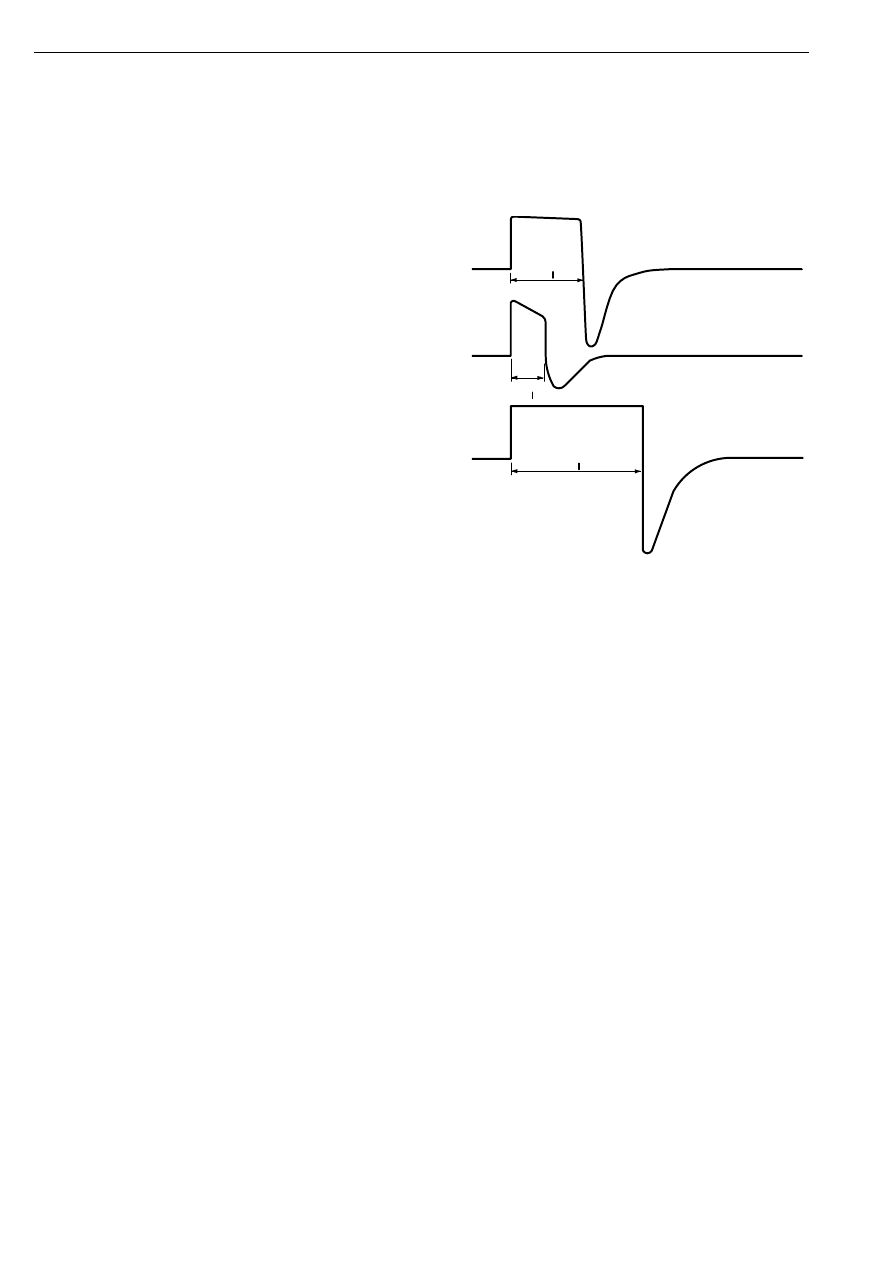
Jednostka sterująca wysyła impuls do
czujnika. Czas trwania impulsu jest różny w
zależności od poziomu indukcyjności cewki.
Poprzez pomiar czasu trwania impulsu
uzyskiwana jest wartość odpowiadająca
wysokości pojazdu.
Zawory i czujniki
30
©
Scania CV AB 1999, Sweden
1215f04o.mkr
Przykład:
•
Pojazd jest podniesiony. Rdzeń wsuwa
się w cewkę. Indukcyjność oraz długość
trwania impulsu wzrastają.
•
Pojazd jest obniżony. Rdzeń wysuwa się
z cewki. Indukcyjność oraz długość
trwania impulsu maleją.
A Impuls na poziomie jezdnym.
B Impuls przy niskiej indukcyjności (niski
poziom pojazdu).
C Impuls przy wysokiej indukcyjności
(wysoki poziom pojazdu).
Wartości podane zostały w przybliżeniu.
300
130
640
us
us
us
A
B
C
Ponieważ rdzeń nie styka się z cewką, nie
występuje zużycie ich powierzchni. Dane
przekazywane przez czujnik są więc bardzo
precyzyjne. Podczas wykrywania i usuwania
usterek nie można dokonywać pomiaru
różnic oporności, gdy czujnik jest aktywny.
Niezależnie od położenia rdzenia oporność
cewki czujnika zawsze wynosi 120 ohm.
Zawory i czujniki
1215f04o.mkr
©
Scania CV AB 1999, Sweden
31
Czujniki ciśnienia T70 i T71
W pojazdach posiadających funkcję
przenoszenia obciążenia ciśnienie w miechu
zawieszenia osi tylnej jest kontrolowane
przez wykorzystanie danych z dwóch
czujników ciśnienia. Czujniki znajdują się
na lewym miechu zawieszenia osi tylnej
oraz części tylnej osi tylnej/osi wleczonej.
Czujnik nacisku podłączony trzema
przewodami. Jeden dla masy, jeden dla
zasilania, a jeden przesyłający sygnał do
jednostki sterującej.
Ciśnienie działa na silikonową membranę,
która w rezultacie działa na mostek
Wheatstone'a i elektroniczny wzmacniacz
pomiaru. Wzmacniacz pomiaru generuje
zróżnicowany sygnał pomiędzy 0,5 a 4,5 V,
proporcjonalnie do ciśnienia w miechu.
Napięcie 0,5 V odpowiada ciśnieniu
atmosferycznemu (ciśnienie powietrza
otoczenia, ciśnienie miecha wynosi 0 bara),
a napięcie 4,5 V odpowiada ciśnieniu
miechów o wartości 10 barów. Napięcie
zasilające jest pochodzi z akumulatora i
wynosi + 24 V.
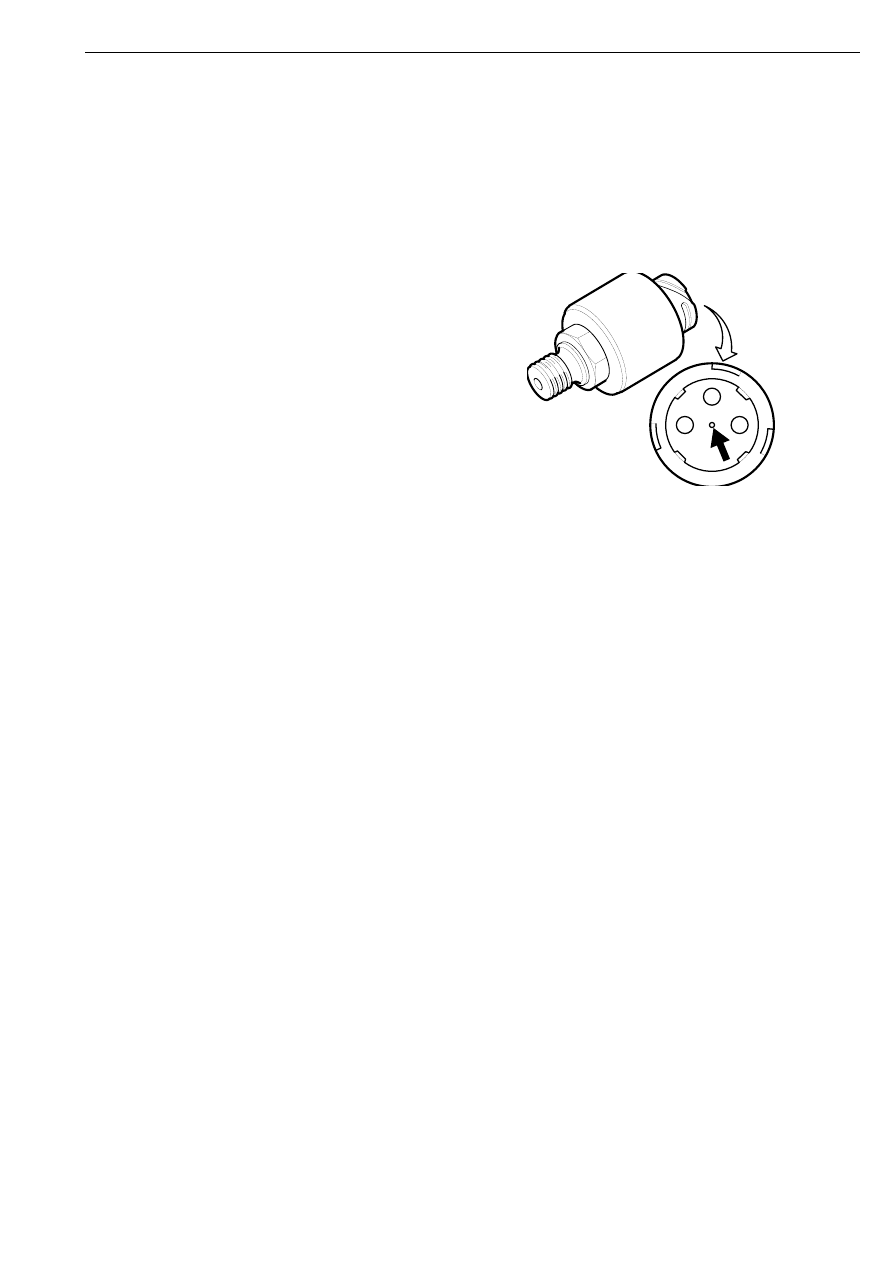
W połączeniu bagnetowym czujnika
ciśnienia znajduje się otwór pozwalający na
dostanie się ciśnienia atmosferycznego do
czujnika. Otwór ten musi być zawsze
drożny, ponieważ ciśnienie atmosferyczne
jest wykorzystywane jako ciśnienie
odniesienia. Powietrze do tego potrzebne
jest przekazywane do czujnika przez rurki.
Czujnik ciśnienia
Otwór w połączeniu elektrycznym
czujnika ciśnienia musi być zawsze
drożny.
05 942
Zawory i czujniki
Document Outline
- 12:03-07
- Jednostka sterująca ELC drugiej generacji
Wyszukiwarka
Podobne podstrony:
Adaptacja Pokładowej jednostki sterującej
CTT Jednostka sterująca
Jednostka sterująca ELC drugiej
Z jednostkami za pan brat
Jedność budowy organizmów żywych1
Socjologia wyklad 03 Jednostka
METODA JEDNOSTEK ARCITEKTONICZNO KRAJOBRAZOWYCH
Gospodarka budzetowa jednostek samorzadu terytorialnego
18 Prowadzenie procesów jednostkowych w technologii
J Jednostka astronomiczna AU (2)
2 5 Granice jednostronne
6 DETALE KALENICA DACHU JEDNOSPADOWEGO 01
mill suwerennosc jednostki
Jednostki wzgledne
jednostkowe procesy chemiczne (2)
ruch jednostajny, Fizyka
relacje jednostka-wspólnota, Współczesne Idee Polityczne
więcej podobnych podstron