POLITECHNIKA ŚLĄSKA
WYDZIAŁ ELEKTRYCZNY
KATEDRA MECHATRONIKI
Instrukcja do ćwiczenia laboratoryjnego
Przedmiot:
Mechanika i Mechatronika
Symbol ćwiczenia:
MiM?
Tytuł ćwiczenia:
Budowa i podstawy programowania robota
przemysłowego
SPIS TREŚCI
Spis rysunków
2
1.
Cele ćwiczenia
3
2.
Podstawowe wiadomości
3
3.
Laboratoryjne stanowisko badawcze
5
3.1.
Obiekt badany
5
3.2.
Urządzenia dodatkowe
6
3.3.
Oprogramowanie
6
4.
Program ćwiczenia - wykaz zadań do realizacji
6
5.
Przykład realizacji zadania – programowanie określonej trajektorii ruchu
7
6.
Raport
7
7.
Pytania
7
Literatura
8
MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
2
SPIS RYSUNKÓW
1.
Schemat strukturalny robota przemysłowego.
3
2.
Oznaczenia literowe oraz symbole par kinematycznych obrotowej i pryzmatycznej.
4
3.
Konfiguracja stawowa manipulatora: robot typu PUMA 500 i jego schemat
kinematyczny.
4
4.
Konfiguracja sferyczna manipulatora: robot typu Stanford i jego schemat
kinematyczny.
4
5.
Konfiguracja SCARA: robot typu AdeptOne i jego schemat kinematyczny.
5
6.
Konfiguracja cylindryczna: robot typu GMF M-100 i jego schemat kinematyczny.
5
7.
Konfiguracja kartezjańska: robot portalowy typu Cincinnati Milacron T3 886 i
jego schemat kinematyczny.
5
8.
Elementy składowe systemu robota przemysłowego Kuka KR3.
6
9.
Widok okna oprogramowania KSS sterującego pracą robota KR3.
6
MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
3
1. CELE ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z następującymi zagadnieniami:
Poznanie elementów składowych nowoczesnego robota przemysłowego.
Podstawowa obsługa robota przemysłowego z poziomu panelu programowania.
Ręczne sterowanie ruchem robota w różnych układach współrzędnych.
Programowanie robota przez uczenie.
Bezpieczne testowanie i uruchamianie programu sterującego ruchem robota.
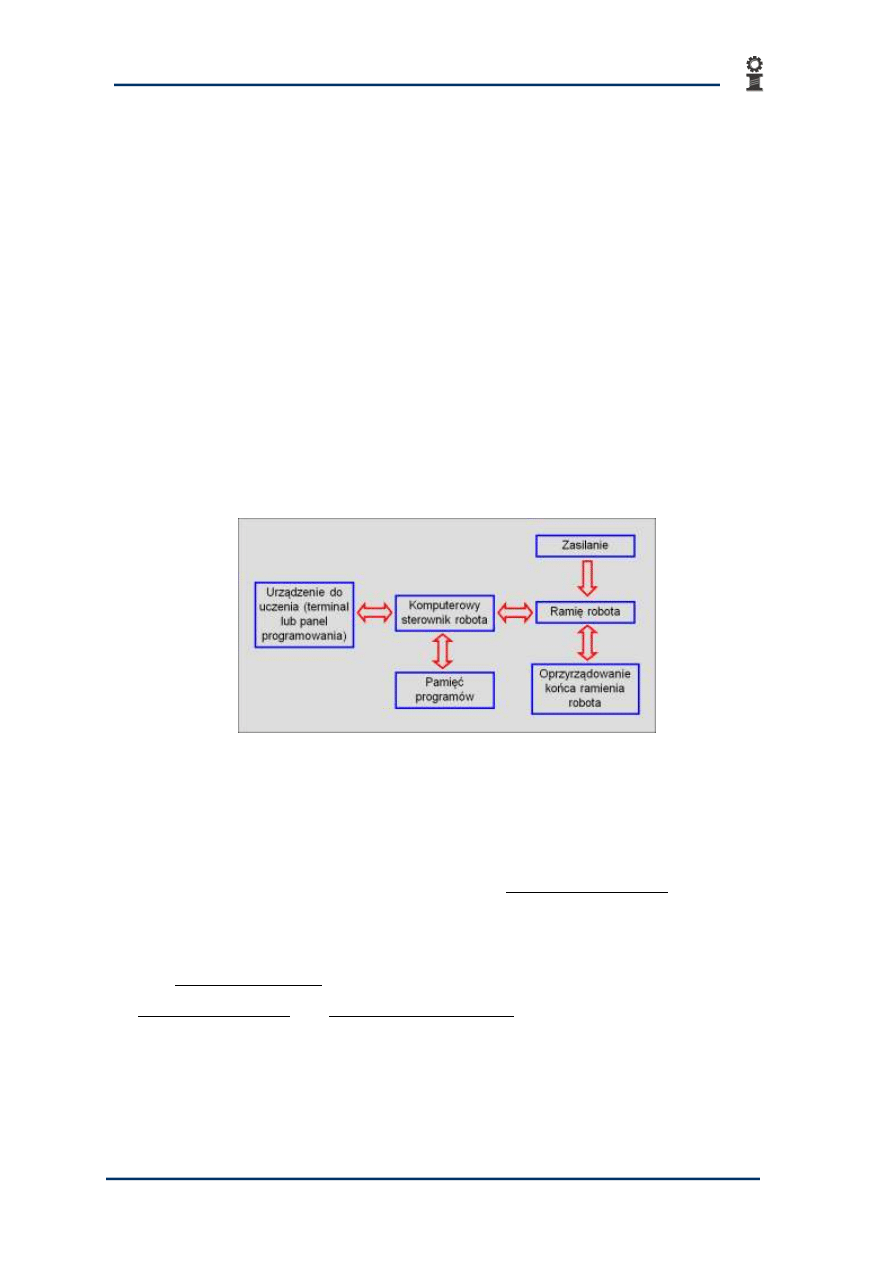
2. PODSTAWOWE WIADOMOŚCI
Robot przemysłowy jest to manipulator wielofunkcyjny, skonstruowany do przenoszenia
materiałów, części, narzędzi lub specjalnych przyrządów mający programowane ruchy w celu
wykonania różnorodnych zadań [1]. Schemat strukturalny typowego robota przemysłowego
jest przedstawiony na rys. 1.
Rys. 1. Schemat strukturalny robota przemysłowego.
Ramię robota inaczej nazywane manipulatorem stanowi część mechaniczną systemu robota.
Na końcu ramienia mogą znajdują się różne narzędzia, którymi posługuje się robot i w
zależności od konkretnej aplikacji mogą to być chwytaki, końcówki spawalnicze i inne.
Manipulator robota przemysłowego tworzy tak zwany łańcuch kinematyczny, czyli zbiór ciał
sztywnych (członów robota) połączonych ze sobą w sposób umożliwiający względny ruch
sąsiednich członów. Ruch ten jest możliwy dzięki łączeniu sąsiednich członów za pomocą tak
zwanych par kinematycznych (przegubów). Najczęściej stosowanymi w praktyce przegubami
są przeguby obrotowe i przeguby pryzmatyczne. Przeguby obrotowe są parami
kinematycznymi pozwalającymi na względny ruch obrotowy pomiędzy sąsiednimi członami.
Natomiast przeguby pryzmatyczne, zwane też przegubami liniowymi, umożliwiają względny
ruch liniowy pomiędzy sąsiednimi członami. Na rys. 2 przedstawiono oznaczenia literowe
oraz stosowane symbole graficzne obu wymienionych rodzajów par kinematycznych.
MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
4
Rys. 2. Oznaczenia literowe oraz symbole par kinematycznych obrotowej i pryzmatycznej.
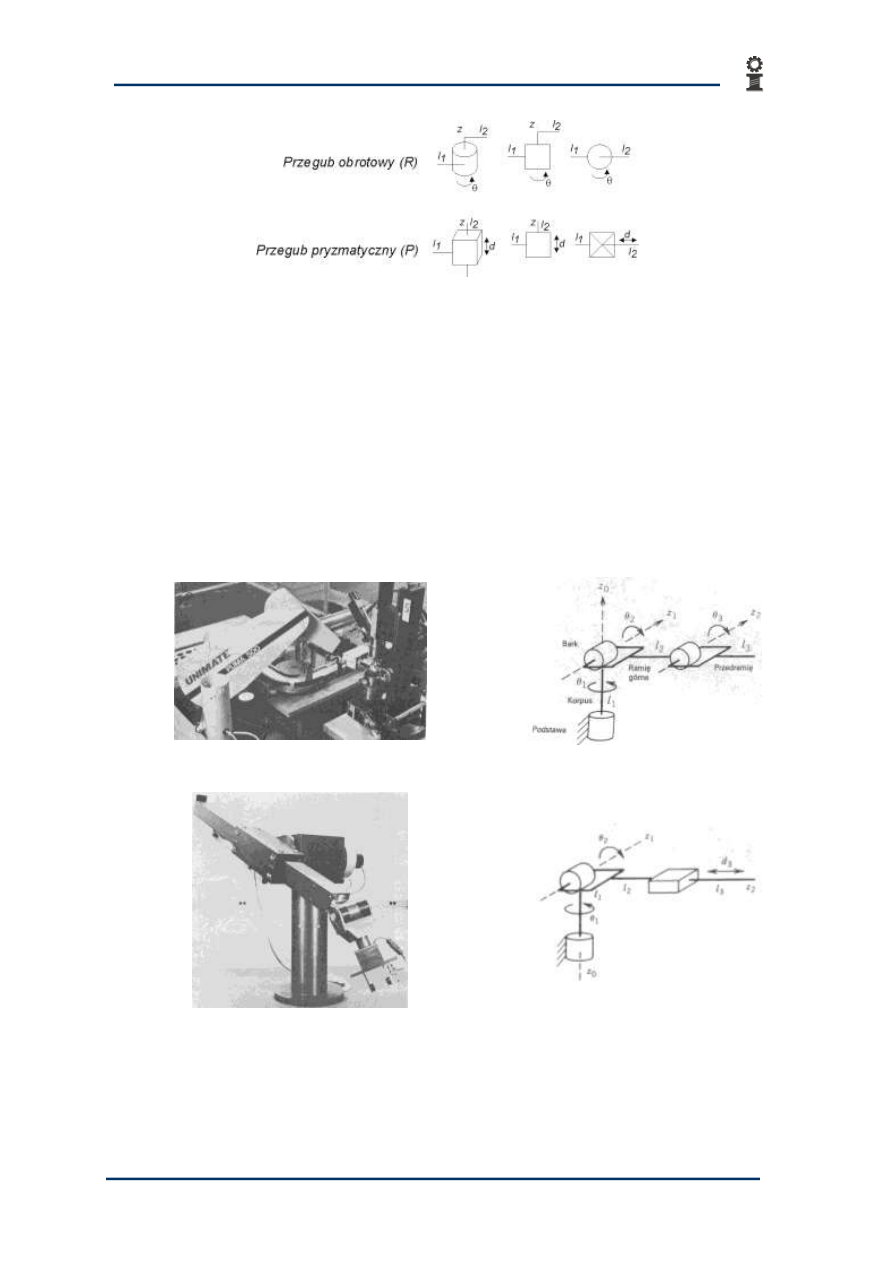
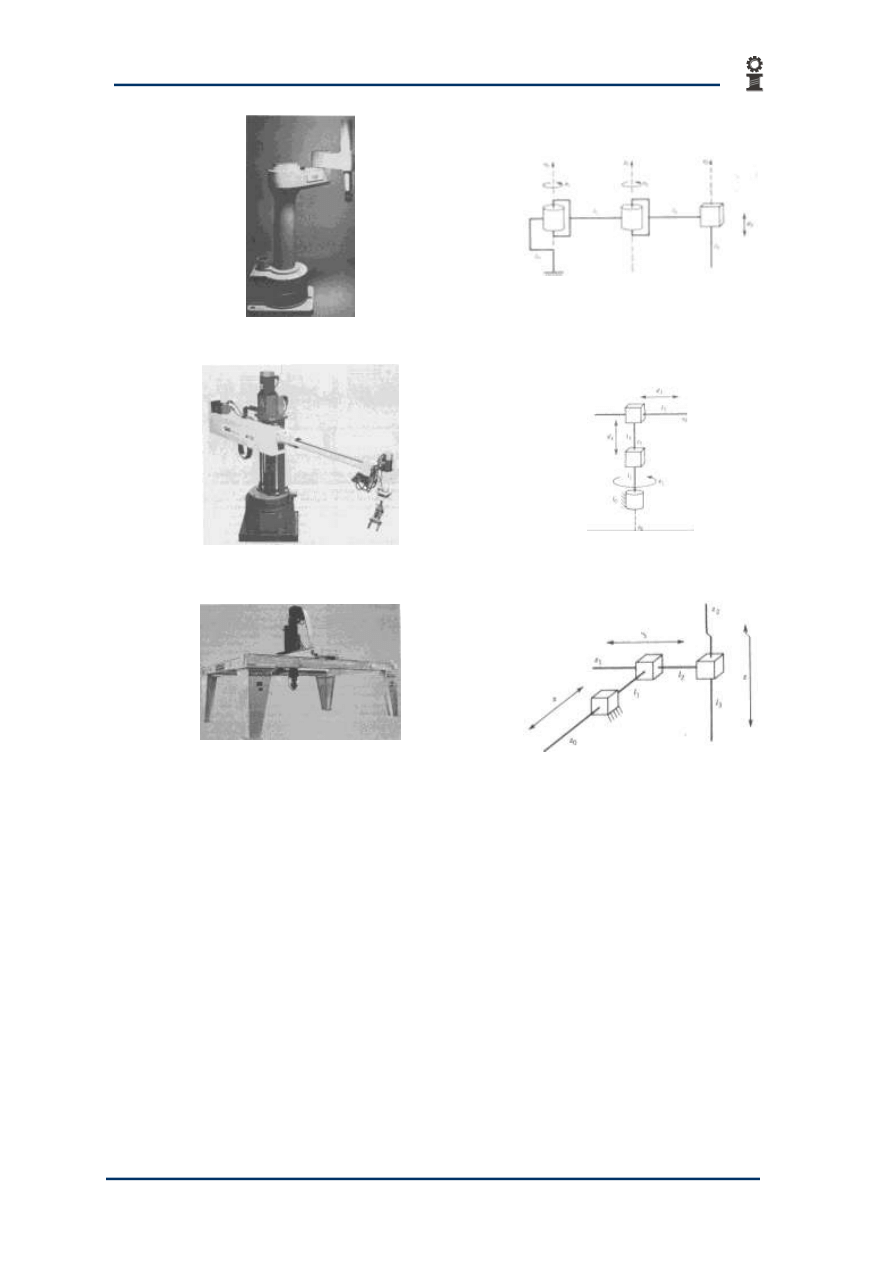
Współcześnie stosowane roboty przemysłowe mają manipulatory o sześciu bądź mniejszej
liczbie stopni swobody. Roboty przemysłowe można sklasyfikować pod względem struktury
kinematycznej, biorąc pod uwagę pierwsze trzy stopnie swobody (przeguby), na pięć grup:
o
Konfiguracja stawowa (RRR) – rys. 3,
o
Konfiguracja sferyczna (RRP) – rys. 4,
o
Konfiguracja SCARA (RRP) – rys. 5,
o
Konfiguracja cylindryczna (RPP) – rys. 6,
o
Konfiguracja kartezjańska (PPP) – rys. 7.
Rys. 3. Konfiguracja stawowa manipulatora: robot typu PUMA 500 i jego schemat kinematyczny [3].
Rys. 4. Konfiguracja sferyczna manipulatora: robot typu Stanford i jego schemat kinematyczny [3].
MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
5
Rys. 5. Konfiguracja SCARA: robot typu AdeptOne i jego schemat kinematyczny [3].
Rys. 6. Konfiguracja cylindryczna: robot typu GMF M-100 i jego schemat kinematyczny [3].
Rys. 7. Konfiguracja kartezjańska: robot portalowy typu Cincinnati Milacron T3 886 i jego schemat
kinematyczny [3].
Zakres zastosowań robotów przemysłowych obejmuje między innymi takie dziedziny jak
spawanie, zgrzewanie, manipulację, paletyzację, montaż, malowanie i wiele innych.
3. LABORATORYJNE STANOWISKO BADAWCZE
3.1. Obiekt badany
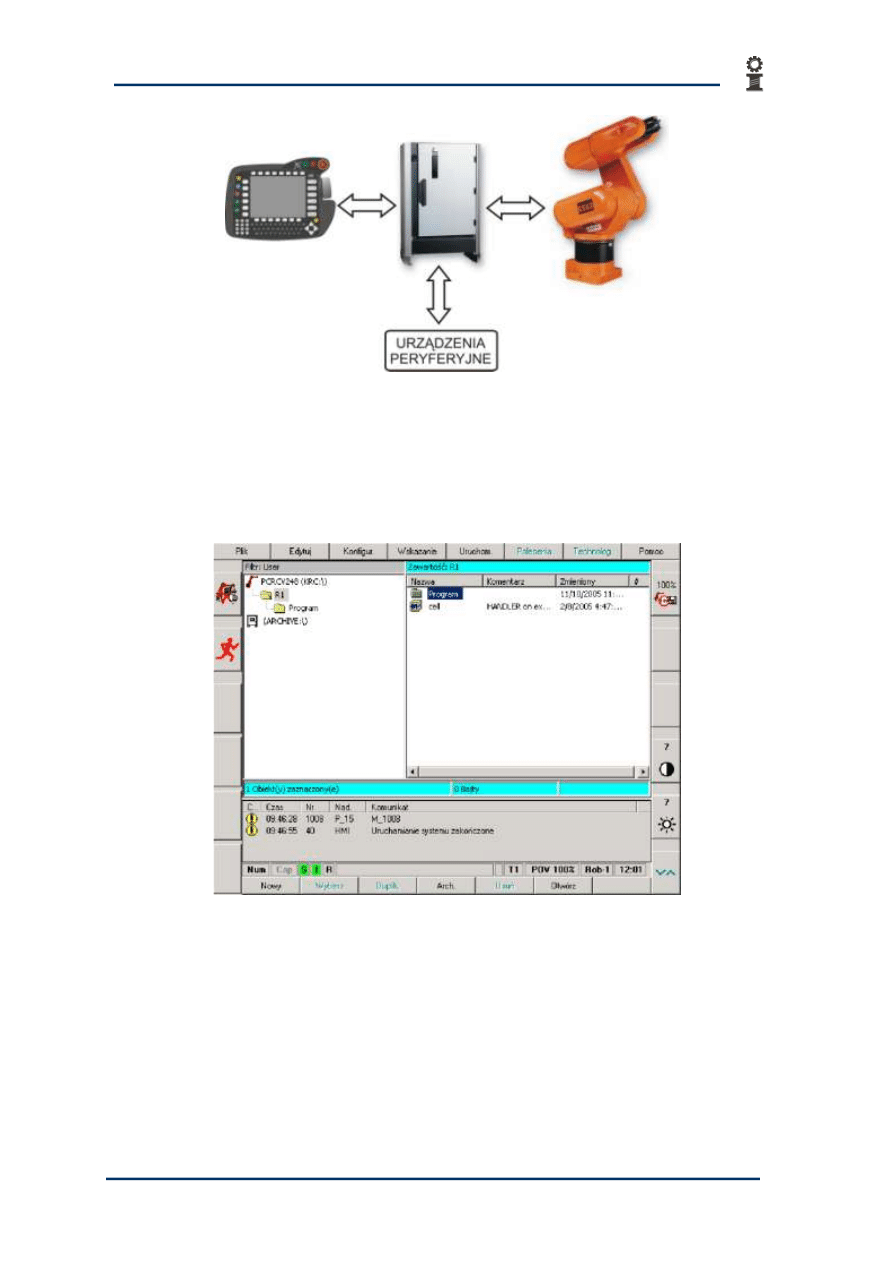
System robota przemysłowego Kuka KR3, na który składają się: panel programowania,
szafa sterująco-zasilająca i manipulator (rys. 8).
MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
6
Rys. 8. Elementy składowe systemu robota przemysłowego Kuka KR3.
3.2. Urządzenia dodatkowe
Brak
3.3. Oprogramowanie
Kuka System Software KSS (rys. 9).
Rys. 9. Widok okna oprogramowania KSS sterującego pracą robota KR3.
4. PROGRAM ĆWICZENIA – WYKAZ ZADAŃ DO REALIZACJI
Zapoznanie się z elementami składowymi robota przemysłowego Kuka KR3 oraz ich
funkcjami.
Określenie konfiguracji kinematycznej robota, sporządzenie schematu kinematycznego.
Zapoznanie się z obsługą panelu programowania robota.

MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
7
Napisanie programu wykorzystującego instrukcje pozycjonowania typu PTP według
wskazówek prowadzącego.
Uruchomienie i przetestowanie napisanego programu.
5. PRZYKŁAD REALIZACJI ZADANIA – PROGRAMOWANIE OKREŚLONEJ
TRAJEKTORII RUCHU
Poniżej przedstawiono widok przykładowego programu napisanego w języku KRL (Kuka
Robot Language) realizujący ruch chwytaka pomiędzy trzema wybranymi punktami P1, P2 i
P3. Program taki realizuję się metodą programowania przez uczenie, czyli zapamiętywanie
wybranych położeń narzędzia robota.
1 INI
2 PTP HOME Vel= 100 % DEFAULT
3 ;Zasadnicza część programu
4 PTP P1
5 PTP P2
6 PTP P3
7 PTP HOME Vel= 100 % DEFAULT
W programie wykorzystano najprostsze komendy ruchowe typu PTP (ang. Point To Point).
Realizacja programu rozpoczyna się i kończy przejściem robota do pozycji spoczynkowej
HOME.
6. RAPORT
Raport z przeprowadzonego ćwiczenia laboratoryjnego powinien zawierać:
Krótki opis robota.
Schemat kinematyczny robota z propozycją przyporządkowania układów współrzędnych.
Przebieg ćwiczenia (główne czynności).
Opis zadania programistycznego, które należało wykonać.
Listing napisanego programu wraz z komentarzami.
Podsumowanie i wnioski.
7. PYTANIA
1. Co znaczy zapis RRR w odniesieniu do struktury kinematycznej robota ? Jakie są inne
możliwości w tym względzie ?
2. Na czym polega pozycjonowanie typu PTP robota przemysłowego ? Jak jeszcze można
pozycjonować robota ?

MECHANIKA I MECHATRONIKA – instrukcja do ćwiczenia laboratoryjnego
Budowa i podstawy programowania robota przemysłowego
8
3. Co to jest łańcuch kinematyczny ?
4. Czym różni się para kinematyczna obrotowa od pryzmatycznej ? Jakie są ich wady i
zalety ?
LITERATURA
1. Honczarenko J.: Roboty przemysłowe. Budowa i zastosowanie. Wydawnictwa Naukowo-
Techniczne, Warszawa 2004.
2. Craig J. J.: Wprowadzenie do robotyki. Mechanika i sterowanie. Wydawnictwa Naukowo-
Techniczne, Warszawa 1995.
3. Spoong M., W., Vidyasagar M.: Dynamika i sterowanie robotów. WNT, Warszawa 1997.
4. Oprogramowanie KUKA System Software. Instrukcja obsługi i programowania. Kuka
Roboter GmbH 2005.
5. Oprogramowanie KUKA System Software. Programowanie – użytkownik. Kuka Roboter
GmbH 2005.
Opracowanie: Damian Krawczyk
Gliwice, 2010
Wyszukiwarka
Podobne podstrony:
kuka visiontech
KUKA
KUKA Load 50 fr
Faults list of Kuka
KUKA Load 50 es
KUKA Load 50 de
KUKA CPC Agent 30 KRC4 de
kuka sim V1 1 en
KUKA Load 50 en
Instrukcja lab RiM1 Kuka
Kuka Palletising
Kukuleczka kuka, dla przedszkoli
KUKA Load 50 it
KUKA RSI, serSensor kss51 en
KUKA RSI rsi r20 en id 744255 Nieznany
KUKA LOAD 32 en
kuka visiontech
KST KUKA Encryption 12 en
Instrukcja lab RiM1 Kuka
więcej podobnych podstron