1
Poziomy strukturalne urządzenia elektronicznego
Urządzenie elektroniczne
Układ cyfrowy
Układ scalony
2
Poziomy złożoności systemów cyfrowych
System cyfrowy
Definiowany jest jako złożony układ cyfrowy, przy czym złożoność układu
zależna jest od poziomu abstrakcji wymaganej do opisania w sposób
kompletny jego operacji.
Poziomy złożoności przetwarzania informacji w systemie cyfrowym
Sterowanie
Dane
Poziom
Wartości logiczne ( “0”, “1” )
lub ich sekwencje
Logiczny
Wartości logiczne
Słowa ( bajty )
Rejestrów
Rozkazy
Słowa
Rozkazów
Programy
Struktury danych
Programów
Wiadomości ( komunikaty )
Systemowy
3
• Uszkodzenie to zdarzenie destrukcyjne powodujące przejście obiektu
(dwustanowego w sensie niezawodnościowym) ze stanu zdatności do stanu
niezdatności, kwalifikujące obiekt do naprawy lub wymiany na inny.
• Uszkodzenia w układach cyfrowych mogą pojawić się na dowolnym etapie
wytwarzania (projektowanie, produkcja) lub w dowolnym momencie
użytkowania.
• Na etapie wytwarzania przyczyną uszkodzeń jest niedoskonałość
technologii produkcji elementów elektronicznych (układów scalonych), jak
i wady wytwarzania płytek drukowanych oraz wady montażu elementów
elektronicznych.
• Najbardziej wrażliwą na uszkodzenia jest technika MOS. Już na etapie
produkcji układów scalonych uszkodzeniu ulega około 6%. Dla techniki
TTL jest to około 1%, a dla ECL poniżej 0,5%.
Uszkodzenia
4
• Błędy na etapie wytwarzania wynikają z poziomu zaawansowania
technologii.
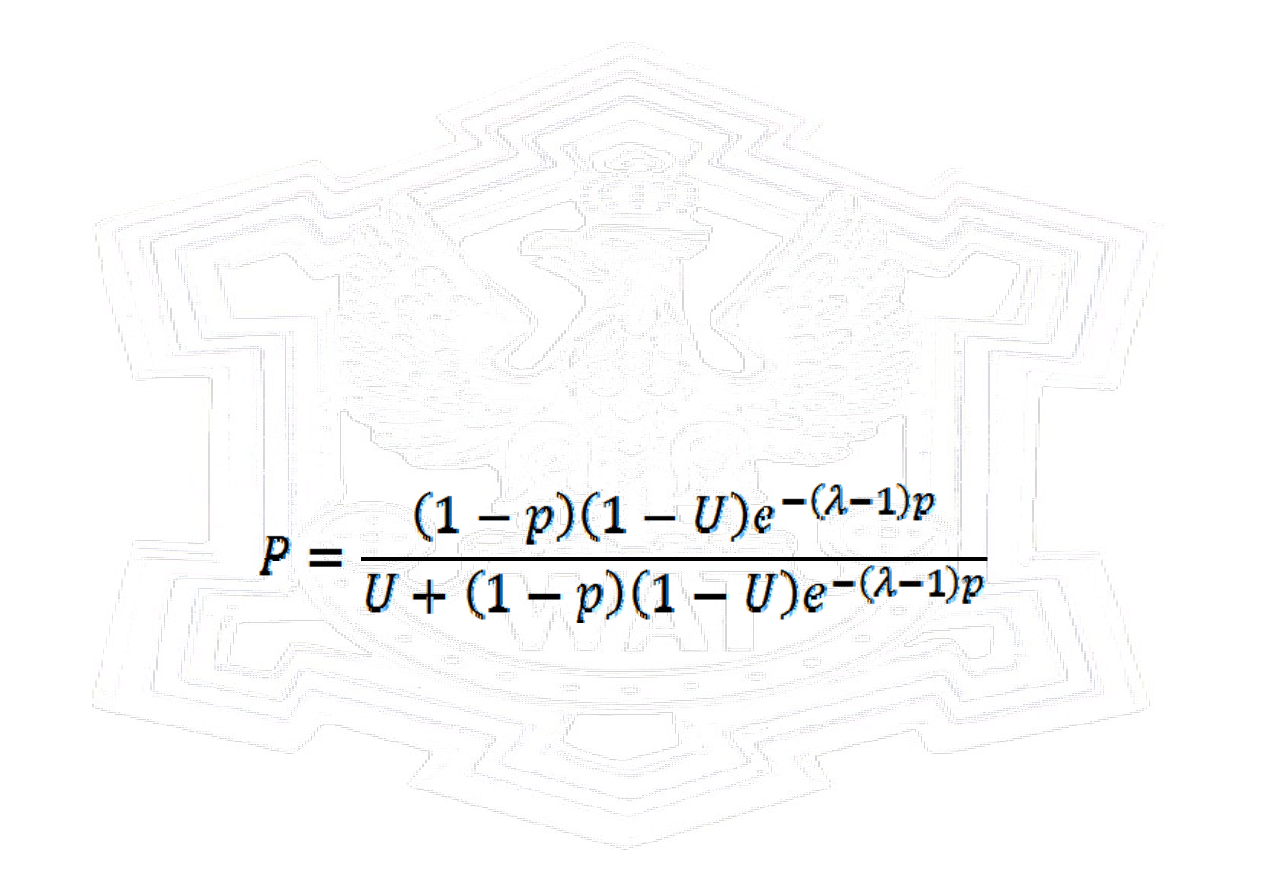
• Jakość procesu produkcyjnego charakteryzuje uzysk U definiowany jako %
zdatnych układów.
• Układy scalone poddawane są testom produkcyjnym, które powinny
zapewnić jak najwyższe prawdopodobieństwo wykrycia błędów p.
• Przy znanym U oraz p prawdopodobieństwo wprowadzenia wadliwego
układu do sprzedaży P określone jest wzorem:
Błędy i diagnozowanie na etapie wytwarzania
Gdzie:
λ – parametr rozkładu Poissona
5
Uszkodzenia - Błędy systemu cyfrowego (ang. error)
Przypadek niepoprawnej operacji systemu objawiający się
zniekształceniem obserwowalnego (wyniku).
Pojęcie błędu ma różne znaczenie na różnych poziomach
przetwarzania informacji systemu komputerowego
• na poziomie programu testowego błąd może objawiać się jako
niepoprawny wynik operacji arytmetycznej;
• na poziomie kontroli logicznej układów (sekwencji bitów) - błąd oznacza
niepoprawną wartość binarną
6
Uszkodzenia - Kryterium szkodliwości
Katastroficzne
Uniemożliwiają całkowicie eksploatację systemu. W wyniku ich wystąpienia
nie mogą być poprawnie realizowane przez system cyfrowy żadne zadania.
Drugorzędne
Umożliwiają wykonywanie przez system zadań, niektórych błędnie,
podstawowe mechanizmy systemu cyfrowego znajdują się w stanie
zdatności (np. mechanizm pobierania i dekodowania rozkazów, przesyłania
danych do/z podzespołów wej/wyj, itp.).
7
Uszkodzenia powstające w procesie
użytkowania układów cyfrowych są
dwojakiego rodzaju:
• uszkodzenia trwałe,
• uszkodzenia przemijające.
Rodzaje uszkodzeń
8
Uszkodzenia trwałe
• Produkowane obecnie układy scalone posiadają
taką właściwość, że przeważająca większość
uszkodzeń struktury fizycznej objawia się w
postaci błędów funkcji logicznej realizowanej
przez pojedynczy układ lub grupę układów.
• Uszkodzenia trwałe są zwykle spowodowane tzw.
„zmęczeniem elektrycznym”.
• Zjawisko to jest znane z klasycznej teorii
niezawodności, w której opisuje się
prawdopodobieństwo uszkodzenia układu w
funkcji czasu.
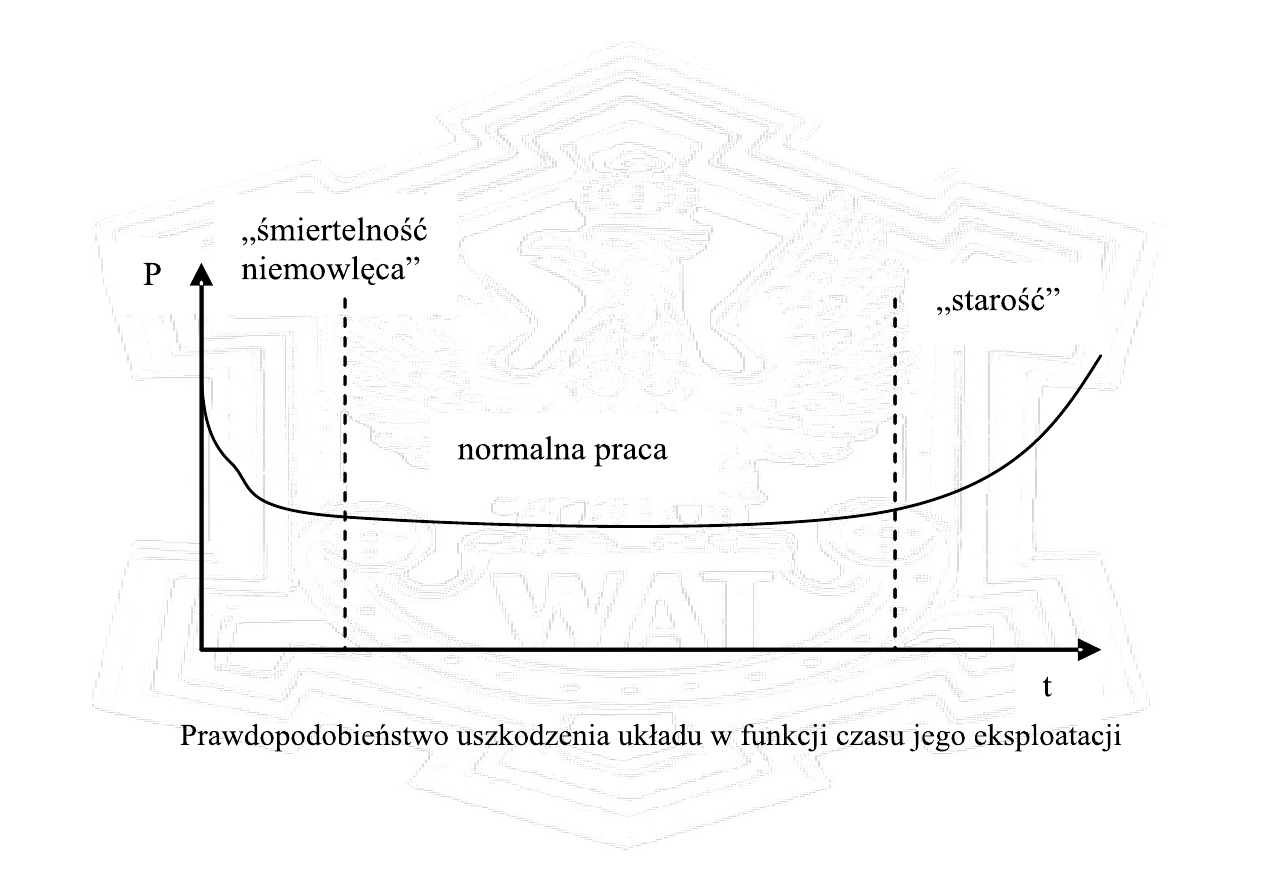
9
Uszkodzenia trwałe
10
Uszkodzenia przemijające
Uszkodzenia przemijające są powodowane chwilową zmianą
warunków pracy układu a w szczególności:
• zmianami parametrów zasilania,
• zmianami temperatury (w tym rozkładu temperatury na
płytce drukowanej – np. płyta główna komputera),
• zmianami wilgotności otoczenia,
• zmianami zewnętrznego pola elektromagnetycznego,
• zmianami promieniowania,
• zmiana częstotliwości pracy układów.
Uszkodzenia przemijające są trudne do identyfikacji i
lokalizacji
11
Błędy dynamiczne
a)
błąd opóźnienia (crosstalk delay)
b)
błąd przyśpieszenia (crosstalk speed-up)
c)
błąd generacji dodatkowego impulsu (crosstalk pulse)
c)
b)
a)
12
Podstawowe typy błędów
Statystyka uszkodzeń w układach cyfrowych
(kombinacyjnych i sekwencyjnych) wskazuje,
że jednym z najczęściej występujących
uszkodzeń objawiających się błędem funkcji
logicznej jest błąd sklejenia z wartością stałą s-
a-c (stuck-at-const lub s-a-f stuck-at-fault).
Błąd ten jest w literaturze symbolicznie
oznaczany w postaci j/c lub Xj/c, gdzie j-
określa numer linii a c – typ defektu.
13
Rozróżniamy dwa rodzaje tego błędu:
• s-a-1 (stuck-at-1) – błąd sklejenia ze stałą wartością
logiczną 1,
• s-a-0 (stuck-at-0) – błąd sklejenia ze stałą wartością
logiczną 0.
Przykładowo:
• 6/0 (X6/0) – oznacza wystąpienie błędu sklejenia z
wartością logiczną 0 (s-a-0) na linii (ścieżce) nr 6,
• 4/1 (X4/1) – oznacza wystąpienie błędu sklejenia z
wartością logiczną 1 (s-a-1) na linii (ścieżce) nr 4.
14
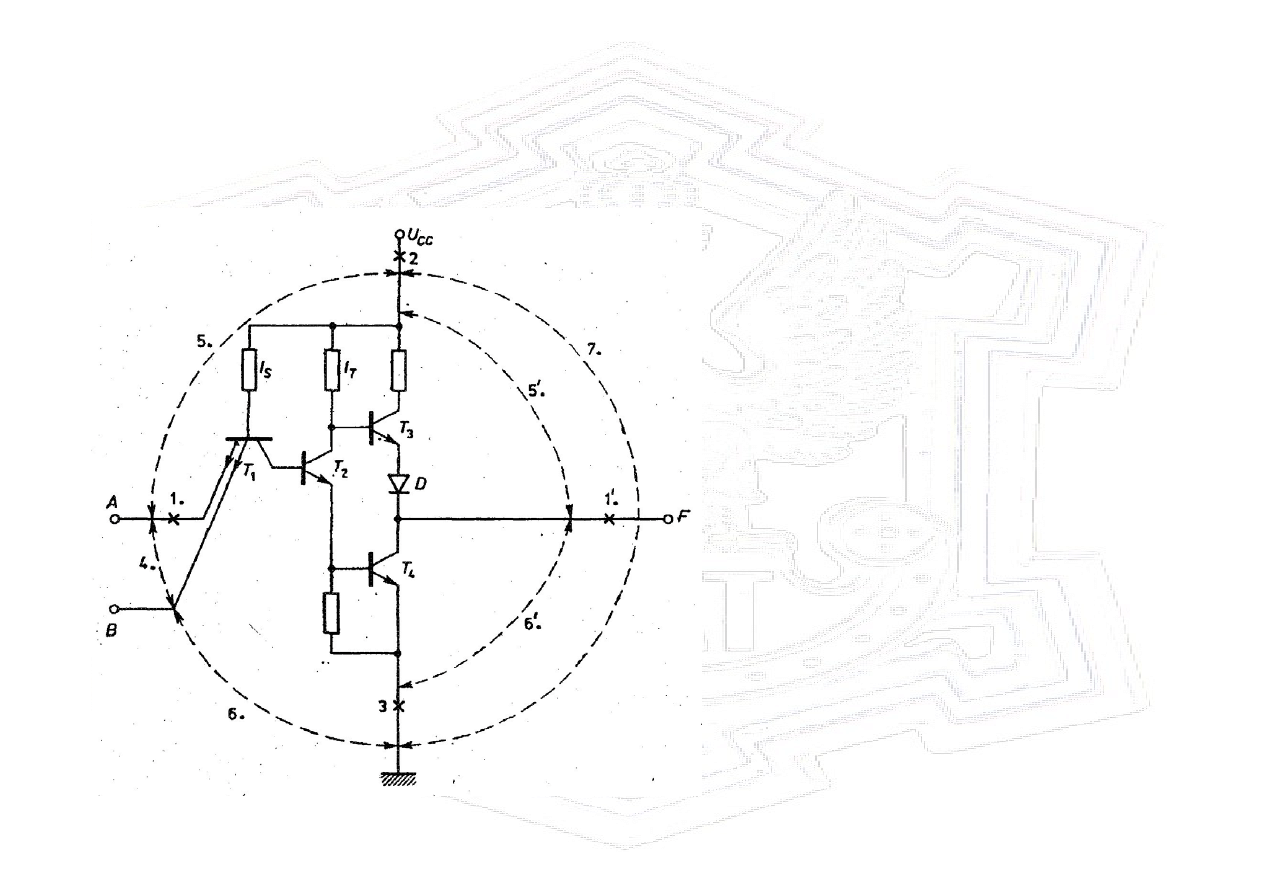
Przykłady uszkodzeń fizycznych w bramce NAND i odpowiadające im uszkodzenia
logiczne
• uszkodzenie 5 odpowiada błędowi
logicznemu typu s-a-1;
• uszkodzenie 4 objawia się w momencie gdy
zwarte (zmostkowane) linie są w różnych
stanach logicznych. Nie można go
przedstawić
przy pomocy błędów
logicznych typu s-a-c;
• uszkodzenie 6 polega na zwarciu linii
sygnału do masy i odpowiada błędowi
logicznemu typu s-a-0;
• uszkodzenie 7 polega na zwarciu linii
zasilania i masy i nie ma interpretacji
logicznej;
15
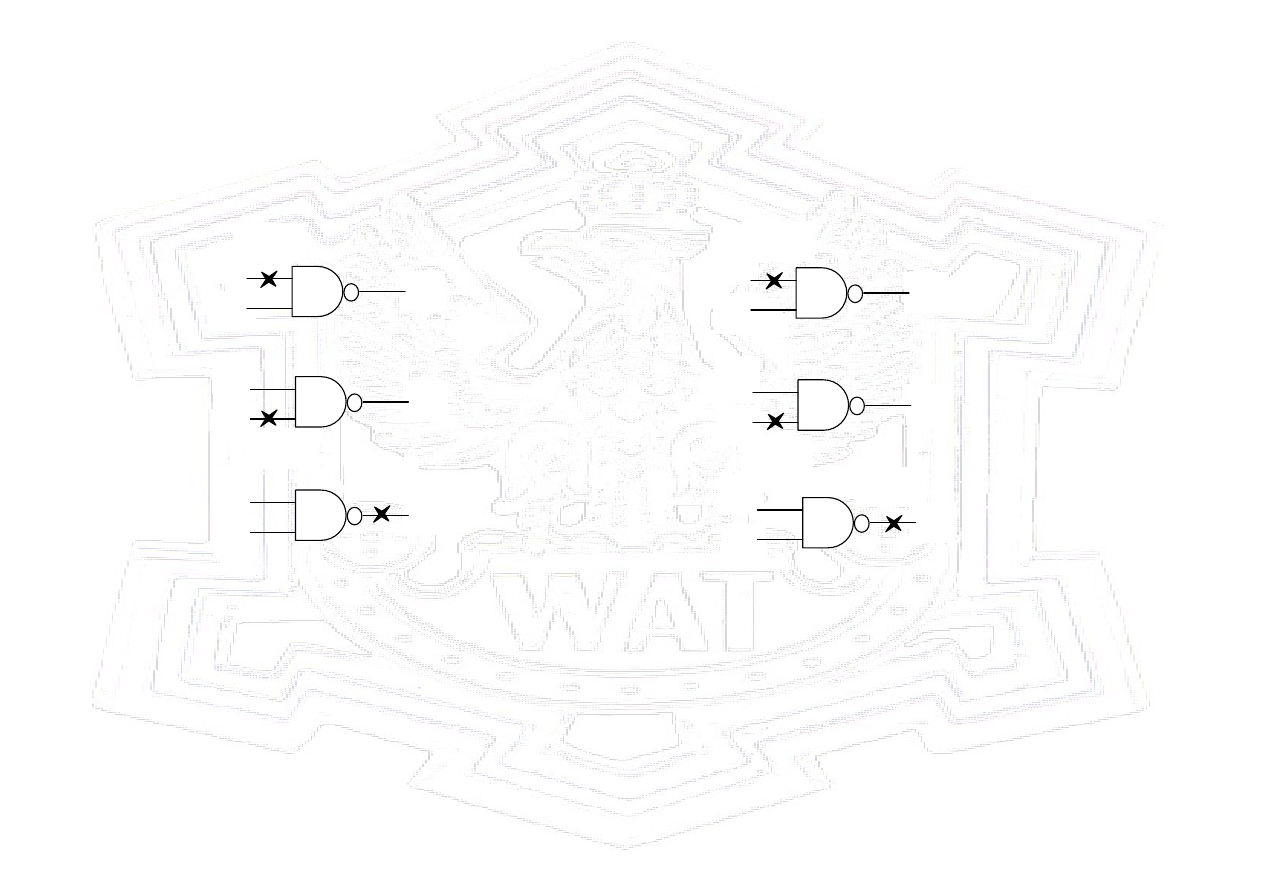
Błędy sklejenia na poziomie struktury
logicznej na przykładzie bramki NAND
Pojedyncze błędy typu s-a-c dają 2k różnych kombinacji na k –
liniach (6)
Błędy pojedyncze i wielokrotne generują 3
k
-1 możliwych kombinacji
wystąpienia błędu funkcji logicznej (26)
F
B
A
s-a-0
F
B
A
F
B
A
F
B
A
F
B
A
s-a-0
s-a-1
s-a-1
s-a-0
s-a-1
F
B
A
16
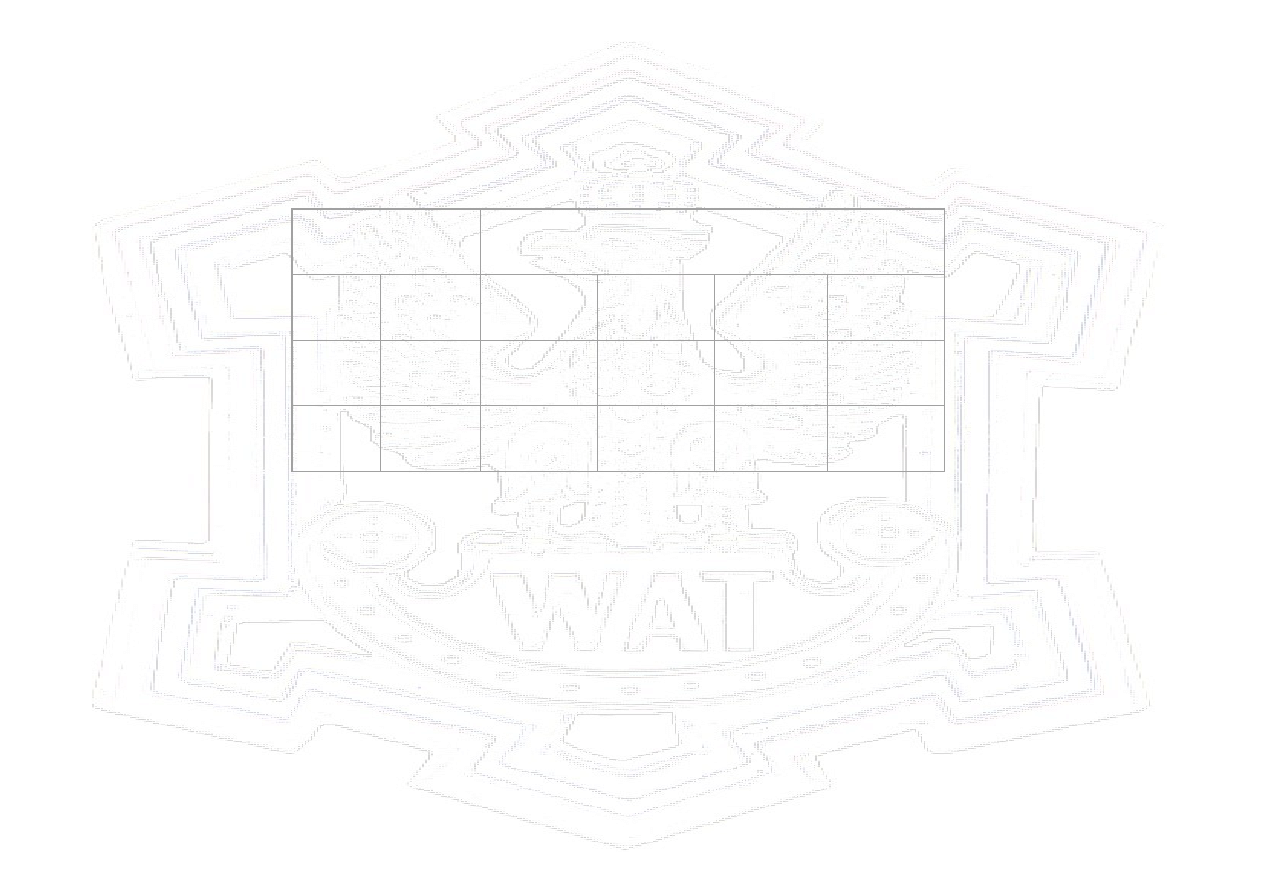
Błędy zmostkowania
Linia
Typ zmostkowania
A
B
M0
MA
MB
M1
0
1
0
0
1
1
1
0
0
1
0
1
Klasycznymi błędami zmostkowania są:
• MA – zwarcie linii A i B przy czym wartość logiczna linii A jest dominująca
• MB – zwarcie linii A i B przy czym wartość logiczna linii B jest dominująca
Błędy M0 i M1 są analogiczne jak błędy sklejania.
Wyszukiwarka
Podobne podstrony:
Wykład 4 Podstawy prawne finansów publicznych
Idea holizmu - wykład 2, podstawy pielęgniarstwa
wykłady z podstaw ekonomii
Konspekt wykładów z Podstaw automatyki wykład 5
Zagadnienia egzaminacyjne PF3-09, SKRYPTY, NOTATKI, WYKŁADY, Podstawy Fizyki 3, wykład
1 wykład Podstawowe pojęcia i przedmiot ekonomi
Wykład 1 - Podstawy organizacji, zarządzanie bhp
Wykład -Podstawy turystyki, Turystyka i Rekreacja, Podstawy turystyki
ZFP wykład 4, podstawy finansów przedsiębiorstwa
Projektowanie baz danych Wykłady Sem 5, pbd 2006.01.07 wykład03, Podstawy projektowania
wykład 3 - podstawy zarządzania - 10.01.2010
wykłady, Podstawy kinezjologi, Podstawy kinezjologi
Wykład 7 PODSTAWOWE ELEMENTY ORGANIZOWANIA
Wykłady Podstawy Fizjologii Człowieka
Wyklad I - podstawy prawne psychiatrii, Psychopatologia
Podstawowe błędy i ich przyczyny w komunikacji interpersonalnej
więcej podobnych podstron