www.elektro.info.pl
2/2003
40
wspó³czesne
systemy zasilania
pr¹dem sta³ym
(czêœæ 2)
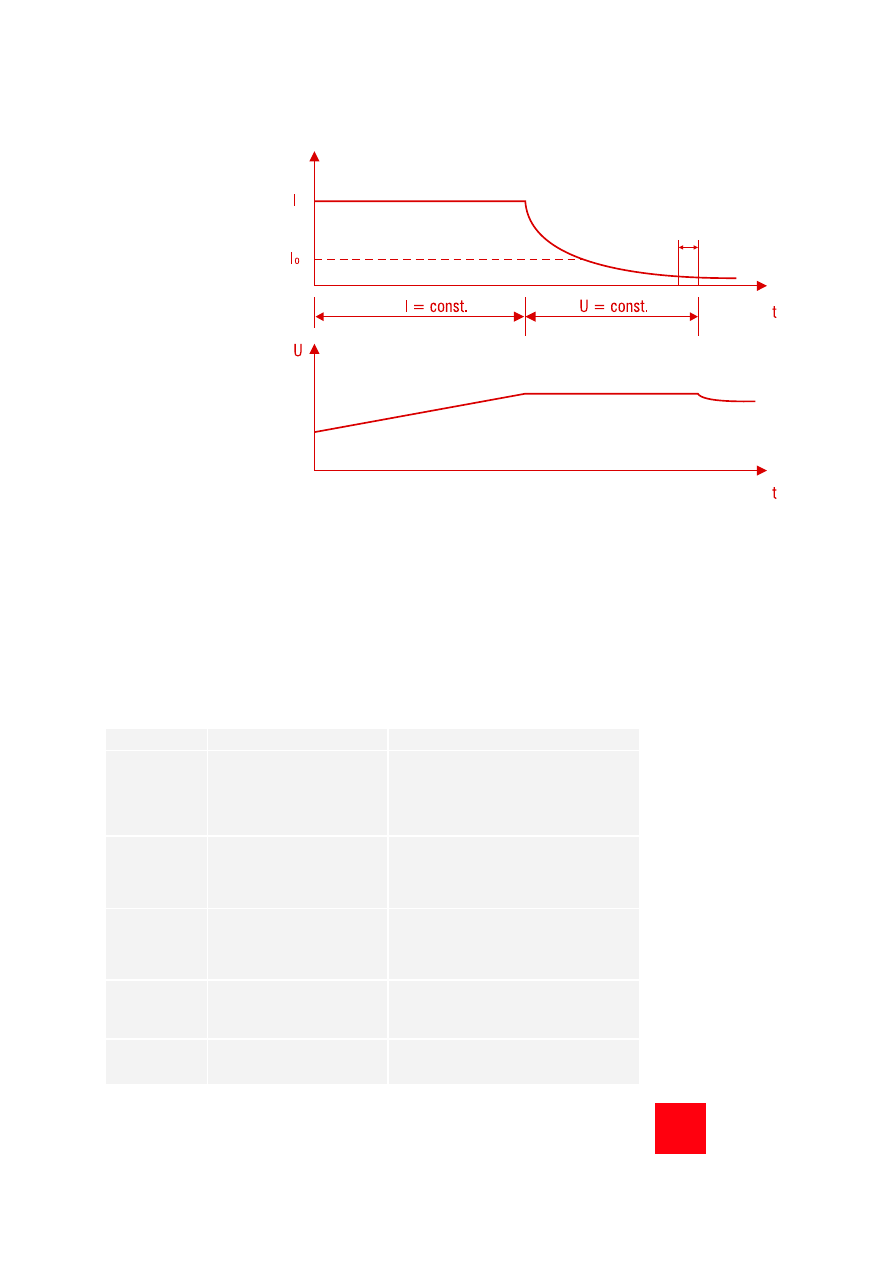
maleæ wartoœæ pr¹du. Po zakoñ-
czeniu ³adowania napiêcie baterii
spada do wartoœci napiêcia bufo-
rowego.
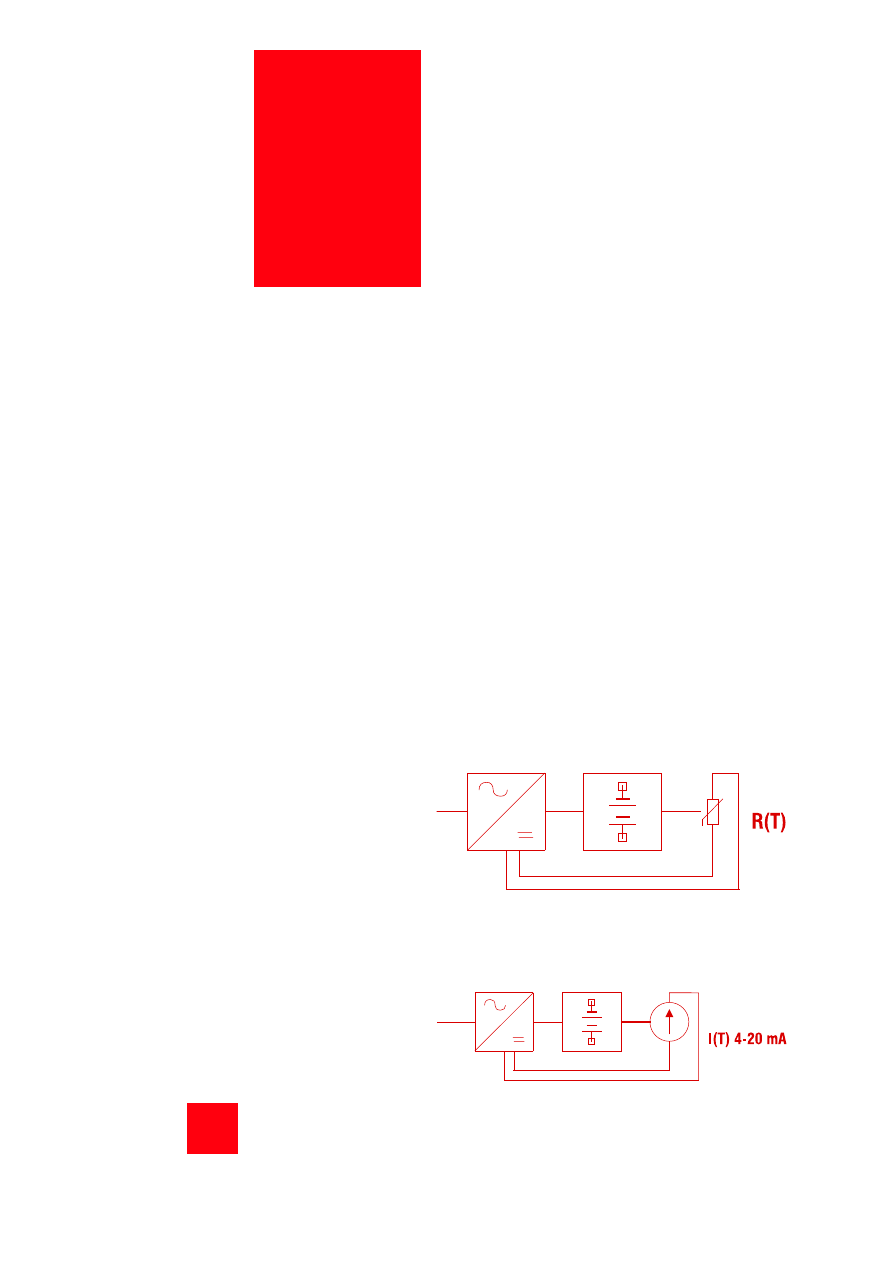
metrów oraz na zmiany rezystancji
obwodu pomiarowego) i prowadzi
do skrócenia czasu ¿ycia baterii aku-
mulatorów. Dobrym rozwi¹zaniem
jest zastosowanie standardu prze-
mys³owego czujników z zakresem
4-20 mA. Standard ten pozwala jed-
noczeœnie na kontrolê ci¹g³oœci ob-
wodów pomiarowych (rys. 2).
³adowanie baterii
Podczas procesu ³adowania ba-
terii wa¿nym elementem jest prawid-
³owe okreœlenie momentu zakoñ-
czenia procesu ³adowania. Na ry-
sunku 3 pokazano proces ³adowa-
nia, który mo¿na podzieliæ na dwa
okresy: ³adowanie sta³ym pr¹dem
i ³adowanie przy sta³ym napiêciu.
Przy ³adowaniu przy sta³ym
napiêciu trzeba ustaliæ moment,
w którym wartoœæ pr¹du przesta-
je spadaæ. Niektóre z zasilaczy ofe-
rowanych na rynku koñcz¹ proces
³adowania po osi¹gniêciu nasta-
wionej wartoœci pr¹du I
o
. W zasi-
laczach produkcji MEDCOM zasi-
lacz monitoruje wartoœæ pr¹du
i precyzyjnie okreœla moment,
w którym nale¿y zakoñczyæ ³ado-
wanie. Moment ten jest okreœlony
przez stwierdzenie, ¿e przesta³a
pomiar
temperatury
Poprawna wspó³praca zasilaczy
z bateri¹ akumulatorów wymaga do-
pasowania wyjœciowego napiêcia za-
silacza do aktualnej temperatury ba-
terii. Napiêcie pracy buforowej jest
zmniejszane wraz ze wzrostem tem-
peratury ogniw – st¹d konieczny jest
precyzyjny pomiar temperatury ogniw
(rys. 1). Czujnik (czujniki) musz¹ byæ
montowane w bezpoœredniej bliskoœ-
ci ogniw (dobre sprzê¿enie cieplne),
czego konsekwencj¹ jest nara¿enie
czujników temperatury na oddzia³y-
wanie agresywnych oparów (kwasy,
zasady) oraz na bezpoœrednie zwarcie
obwodów pomiarowych z potencja-
³em baterii. Obwody pomiarowe mu-
sz¹ byæ zabezpieczone przed wp³y-
wem agresywnego œrodowiska oraz
wyposa¿one w uk³ady izolacji galwa-
nicznej, odpornej na przepiêcia wys-
têpuj¹ce w obwodach baterii.
Innym problemem jest d³ugotr-
wa³e utrzymanie sta³ych paramet-
rów uk³adu pomiarowego – st¹d
konieczne jest stosowanie elemen-
tów pomiarowych odpornych na sta-
rzenie. Stosowanie czujników ter-
mistorowych wymaga czêstego stro-
jenia obwodów pomiarowych (ze
wzglêdu na niesta³oœæ ich para-
liwiaj¹cy komunikowanie siê zasila-
czy ze stosowanymi u odbiorców sys-
temami nadzoru. Stosowane s¹:
t
sygna³y alarmowe informa-
cyjne: prostownik wy³¹czony, szyb-
kie ³adowanie baterii akumulato-
rów, formowanie baterii, awaria sie-
system alarmów
W ka¿dym, nawet najlepszym
systemie zasilania, okresowo wystê-
puj¹ nieprawid³owoœci w pracy
poszczególnych elementów sk³ado-
wych. W celu szybkiej eliminacji tych
stanów konieczne jest sygnalizowa-
nie zagro¿enia awari¹, jak i samych
awarii systemu. W tym celu koniecz-
ne jest wyposa¿anie zasilaczy w roz-
budowany system alarmowy, umo¿-
ci zasilaj¹cej, zadzia³anie uk³adu
sieciowego SZR (w zasilaczach
o podwójnym zasilaniu), zadzia³a-
nie uk³adu do³¹czenia baterii do-
dawczej, zadzia³anie uk³adu prze-
ciwogniwa, przekroczenie tempera-
tury prostownika, przekroczenie pr¹-
du maksymalnego prostownika;
t
sygna³y alarmowe zwi¹zane
z awariami prostownika: uszko-
dzenie bezpiecznika i prostow-
nika, uszkodzenie systemu
mgr in¿. Rafa³ Drê¿ek
dr in¿.
Wojciech Szaraniec
dr in¿. Wojciech Warda
MEDCOM Sp. z o.o.
Rys. 1 Temperaturowa kompensacja napiêcia pracy buforowej z czujnikiem
termistorowym
Rys. 2 Temperaturowa kompensacja napiêcia pracy buforowej z sond¹ pr¹dow¹
41
2/2003
www.elektro.info.pl
wyœwietlaj¹cego, uszkodzenie
wentylatora, uszkodzenie uk³a-
du wyrównuj¹cego pr¹dy, usz-
kodzenie uk³adu korekcji ter-
micznej napiêcia pracy buforo-
wej;
t
sygna³y alarmowe zwi¹zane
z bateri¹ akumulatorów: bate-
ria roz³adowana, brak ci¹g-
³oœci obwodu baterii, napiêcie
wyjœciowe poza tolerancj¹,
przekroczenie temperatury ba-
terii, przekroczenie dopuszczal-
nych têtnieñ napiêcia DC, do-
ziemienie.
Sygna³y te s¹ wyprowadzane
na przekaŸniki alarmowe, umo¿li-
wiaj¹ce ³¹cznoœæ stykow¹ z sys-
temem monitorowania. W celu
u³atwienia kontroli, sygna³y alar-
mowe s¹ grupowane na stykach
przekaŸników alarmów „pilnych”
i „niepilnych”.
Osobno zasilacze s¹ wyposa¿a-
ne w interface szeregowy do zdalnej
kontroli i diagnostyki pracy prostow-
nika. T¹ drog¹ mo¿na uzyskaæ
szczegó³owe dane pomiarowe, ta-
kie jak: napiêcie wyjœciowe pros-
townika, napiêcie ogniwa baterii,
pr¹d wyjœciowy prostownika, pr¹d
baterii akumulatorów, temperatura
w otoczeniu baterii, ³adunek wpro-
wadzony i pobrany z baterii, komu-
nikaty o stanach alarmowych, zapi-
sy rejestratora stanów alarmowych.
Bardzo istotne z punktu nieza-
wodnoœci zasilania odbiorów DC
s¹ uk³ady do badania ci¹g³oœci
obwodu baterii akumulatorów.
Podczas ³adowania baterii obec-
noœæ pr¹du ³adowania jest wys-
tarczaj¹c¹ oznak¹ ci¹g³oœci ob-
wodu baterii. Jednak wiêkszoœæ
czasu pracy systemu zasilania DC
jest zwi¹zana z utrzymywaniem
stanu pe³nego na³adowania bate-
rii, w którym wartoœæ pr¹du bate-
rii jest bliska zeru. Konieczne jest
budowanie uk³adów kontroli ci¹g-
³oœci obwodu baterii.
Rozwi¹zanie stosowane w zasi-
laczach buforowych firmy MED-
COM jest bardzo proste. Jako kry-
terium ci¹g³oœci przyjêto przep-
³yw pr¹du sta³ego przez bateriê.
Podczas pracy okresowo zwiêk-
szane jest napiêcie pracy buforo-
wej (poni¿ej granicznej wartoœci
napiêcia têtnieñ). Powoduje to
przep³yw impulsów pr¹du przez
bateriê. Ich obecnoœæ œwiadczy
o ci¹g³oœci obwodu baterii.
Rozwi¹zanie jest nieskomp-
likowane, poniewa¿ jako wymusze-
nie jest wykorzystywany prostownik,
a do pomiaru s³u¿y czujnik LEM
pomiaru pr¹du baterii.
system
ch³odzenia
Uzyskanie wysokiej niezawod-
noœci pracy zasilaczy, a w kon-
sekwencji wysokiej niezawodnoœ-
ci pracy systemów zasilania, jest
uzale¿niona od sprawnego odpro-
wadzenia ciep³a z podzespo³ów
mocy. Wprowadzenie wysokiej
koncentracji przetwarzanej mocy
na jednostkê objêtoœci (minima-
lizacja gabarytów urz¹dzeñ) wy-
Rys. 3 Proces ³adowania baterii – okreœlenie momentu zakoñczenia ³adowania
Rodzaj uk³adu
Zalety
Wady
Bez dodatkowych
q Prosta konstrukcja
q Brak wyrównywania pr¹dów
uk³adów
q Brak dodatkowych po³¹czeñ
q Zasilacze pracuj¹ z pe³n¹ moc¹ lub w stanie
wyrównywania
pomiêdzy zasilaczami
pracy ja³owej
pr¹dów
q Szybkie starzenie siê jednostek najbardziej
obci¹¿onych
q Problem ze zmian¹ nastaw zasilaczy
Pasywne
q Prosta konstrukcja
q Czêœciowe wyrównanie pr¹dów
wyrównywanie
q Brak dodatkowych po³¹czeñ
q Straty mocy na rezystorach wyrównawczych
pr¹dów
pomiêdzy zasilaczami
q Potrzeba indywidualnego strojenia zasilaczy
do pracy równoleg³ej
q Problem ze zmian¹ nastaw zasilaczy
Aktywne analogowe q Dobre zrównowa¿enie pr¹dów
q Brak kontroli nad systemem w przypadku awarii
wyrównywanie
q Mo¿liwoœæ prostej jednoczesnej
jednostki centralnej (element krytyczny)
pr¹dów z jednostk¹
korekcji parametrów zasilaczy
q Z³o¿onoœæ uk³adu
centraln¹
q Trudna, b¹dŸ niemo¿liwa analiza bezpieczeñst-
wa systemu
Aktywne analogowe q Dobre zrównowa¿enie pr¹dów
q Problem ze zmian¹ nastaw zasilaczy
wyrównywanie
q OdpornoϾ na awarie
pr¹dów z active
current sharing
Aktywne cyfrowe
q Du¿a odpornoœæ na zak³ócenia
q Z³o¿onoœæ uk³adu
wyrównywanie
q Mo¿liwoœæ prostej jednoczesnej
q Trudna, b¹dŸ niemo¿liwa analiza bezpieczeñstwa
pr¹dów
korekcji parametrów zasilaczy
systemu
Tabela 1 Porównanie w³aœciwoœci uk³adów wyrównywania pr¹dów pomiêdzy modu³ami systemu
42
www.elektro.info.pl
2/2003
maga stosowania bardzo wydaj-
nych uk³adów odprowadzenia
ciep³a z elementów aktywnych
(tranzystory, diody), jak i pasyw-
nych (transformatory, d³awiki,
³¹czówki, przewody itp.). Pods-
tawowa trudnoϾ to ograniczenia
maksymalnej temperatury ch³o-
dzonych podzespo³ów. Szczegól-
nie dotyczy to elementów pó³p-
rzewodnikowych, gdzie tempera-
tura z³¹czy w praktyce nie mo¿e
przekroczyæ 120°C. Oznacza to,
¿e maksymalna temperatura pod-
stawy modu³u IGBT lub diody nie
mo¿e przekroczyæ 90°C. Stosuje
siê ch³odzenie powietrzne z kon-
wekcj¹ naturaln¹ lub wymuszon¹
oraz ch³odzenie cieczowe. Wy-
muszone ch³odzenie powietrzne
lub cieczowe pozwala na zwiêk-
szenie skutecznoœci ch³odzenia.
Ch³odzenie cieczowe, ze wzglê-
du na wiêksz¹ pojemnoœæ ciepl-
n¹ czynnika ch³odz¹cego, za-
pewnia ³atwy transport ciep³a
na wiêksze odleg³oœci. Mo¿liwe
jest te¿ sch³odzenie czynnika
ch³odz¹cego w uk³adach klima-
tyzatorów. Jest to obarczone ko-
niecznoœci¹ budowy systemu
ch³odzenia (rury, wymienniki
ciep³a, ch³odnice itp.). Zastoso-
wanie rozbudowanych systemów
ch³odzenia wymaga szczegól-
nych rozwi¹zañ zapewniaj¹cych
ci¹g³oœæ odbierania ciep³a.
W przypadku ch³odzenia powiet-
rznego jest to zapewnienie dro¿-
noœci toru powietrznego (zanie-
czyszczenie filtrów powietrza)
oraz zapewnienie odpowiedniej
temperatury powietrza ch³odz¹-
cego. W systemach o obiegu wy-
muszonym dochodzi problem
ci¹g³oœci przep³ywu czynnika
ch³odz¹cego (wentylatory, pom-
py). Uszkodzenie ich powoduje
natychmiastowy wzrost tempera-
tury elementów ch³odzonych
(bardzo ma³a pojemnoœæ cieplna
ch³odnic). Oznacza to koniecz-
noϾ praktycznie natychmiasto-
wego wy³¹czenia urz¹dzenia
(czujniki przekroczenia tempera-
tury). Uzyskanie wysokiej nieza-
wodnoœci systemu ch³odzenia
elementów mocy wymaga moni-
torowania poprawnej pracy syste-
mu (czujniki przep³ywu powiet-
rza, cieczy), zastosowania uk³a-
dów pomiaru temperatury ele-
mentów krytycznych oraz wpro-
wadzenia redundancji wentylato-
rów lub pomp.
magnetyki
Rozwój podzespo³ów magne-
tycznych stosowanych w zasila-
czach jest zwi¹zany z pojawie-
niem siê na rynku nowych mate-
ria³ów magnetycznych, pozwala-
j¹cych na pracê z wysok¹ czês-
totliwoœci¹, przy stosunkowo du-
¿ych wartoœciach indukcji mag-
netycznej bez znacznego wzrostu
strat mocy. Pozwala to na dopa-
sowanie czêstotliwoœci pracy
transformatorów i d³awików do
mo¿liwoœci podzespo³ów pó³p-
rzewodnikowych. W konsekwen-
cji jest mo¿liwe uzyskanie ma-
³ych gabarytów zasilaczy przy ut-
rzymaniu poziomu sprawnoœci
przetwarzania energii i niezawod-
noœci pracy urz¹dzeñ. W obwo-
dach magnetycznych s¹ stosowa-
ne najnowsze ferryty pozwalaj¹ce
na pracê z czêstotliwoœci¹ do
400 kHz. Ich wad¹ jest stosunko-
wo niewielka wartoϾ dopusz-
czalnej indukcji magnetycznej,
która w zale¿noœci od zastosowa-
nej czêstotliwoœci pracy waha siê
w przedziale 50 do 250 mT. Im
wy¿sza czêstotliwoœæ pracy, tym
ni¿sza wartoœæ dopuszczalnej in-
dukcji magnetycznej. Drug¹ gru-
p¹ materia³ów magnetycznych
s¹ materia³y amorficzne i nanok-
rystaliczne. Cechuj¹ siê one wy-
sok¹ dopuszczaln¹ wartoœci¹ in-
dukcji magnetycznej przy du¿ych
czêstotliwoœciach pracy, co poz-
wala na znaczne zmniejszenie
gabarytów podzespo³ów magne-
tycznych. Jednoczeœnie s¹ one
znacznie bardziej odporne na usz-
kodzenia mechaniczne podczas
monta¿u i transportu, jak i na
naprê¿enia mechaniczne wynika-
j¹ce z ró¿nych wspó³czynników
rozszerzalnoœci termicznej stoso-
wanych materia³ów.
w³aœciwoœci
regulacyjne
Obserwuje siê sta³y wzrost
czêstotliwoœci pracy przekszta³t-
ników tranzystorowych, co jest
zwi¹zane z wprowadzeniem do
produkcji coraz szybszych podzes-
po³ów pó³przewodnikowych.
Najnowsze tranzystory mocy typu
IGBT wraz z miêkko wy³¹czany-
mi diodami mocy pozwalaj¹ na
zwiêkszenie czêstotliwoœci prze-
³¹czeñ bez znacznego zwiêksze-
nia komutacyjnych strat mocy.
Stosowane czêstotliwoœci przet-
warzania energii elektrycznej
osi¹gaj¹ wartoœæ 20 kHz dla mo-
dulacji PWM oraz 50 kHz dla
przekszta³tników rezonansowych,
przy mocy przekszta³canej oko ³ o
20 kW. Stosowanie wysokiej
czêstotliwoœci modulacji pozwala
na znaczne zmniejszenie sta³ych
czasowych filtrów napiêcia wyjœ-
ciowego. Zapewnia siê szybk¹ re-
gulacjê napiêcia wyjœciowego
w przypadku skokowych zmian
napiêcia zasilaj¹cego przekszta³-
tnik lub zmian pr¹du obci¹¿enia.
Rozwi¹zanie pozwala na „œledze-
nie” pr¹du pobieranego przy dy-
namicznych zmianach obci¹¿e-
nia. Eliminuje siê lub znacznie og-
ranicza funkcjê filtracji napiêcia
sta³ego przez bateriê akumulato-
rów, przez co unika siê przep³y-
wu sk³adowej zmiennej pr¹du
Rodzaj uk³adu
Zalety
Wady
Rezerwa zimna
q Uk³ad zapasowy utrzymywany w stanie q Koniecznoœæ 100% przewymiarowania systemu
beznapiêciowym – niskie nara¿enia
q D³ugi czas rozruchu zwi¹zany z za³¹czeniem
na uszkodzenie i zu¿ycie w stanie
uk³adu rezerwowego i przejêciem obci¹¿enia
bezawaryjnej pracy
q Stany przejœciowe s¹ du¿ym nara¿eniem
na uszkodzenie podzespo³ów
q KoniecznoϾ okresowego testowania
Rezerwa gor¹ca
q Szybkie prze³¹czenie obci¹¿enia
q KoniecznoϾ 100% przewymiarowania systemu
zwi¹zane ze sta³¹ gotowoœci¹ uk³adu q Zu¿ycie i nara¿enie na uszkodzenie zwi¹zane
zapasowego
ze stanem ci¹g³ej pracy uk³adu
q Stany przejœciowe s¹ du¿ym nara¿eniem
na uszkodzenie podzespo³ów
Redundancja n+1 q Ma³e przewymiarowanie systemu
q Zu¿ycie i nara¿enie na uszkodzenie zwi¹zane
(maleje wraz z ca³kowit¹ iloœci¹
ze stanem ci¹g³ej pracy uk³adu
modu³ów)
q Du¿a liczba modu³ów powoduje du¿¹ iloœæ
interwencji serwisu
q Wysokie koszty eksploatacyjne
Redundancja 1+1 q Obci¹¿enie modu³ów poni¿ej 50%
q KoniecznoϾ 100% przewymiarowania
q Niska temperatura pracy,
systemu
q Wysoka niezawodnoœæ podzespo³ów
q Zu¿ycie i nara¿enie na uszkodzenie zwi¹zane
q Bezstresowe prze³¹czenie obci¹¿enia
ze stanem ci¹g³ej pracy uk³adu
q Wysoka sprawnoœæ (optymalny stopieñ q Wysokie koszty instalacji
obci¹¿enia)
q Niskie koszty eksploatacji
Tabela 2 Porównanie w³aœciwoœci uk³adów z redundancj¹

wyjœciowego przez bateriê aku-
mulatorów. Prowadzi to do
zmniejszenia temperatury pracy
i zwiêkszenia czasu ¿ycia baterii.
t
Wyrównywanie pr¹dów miê-
dzy modu³ami systemu – po-
³¹czenie kilku zasilaczy do
pracy równoleg³ej, w celu
zwiêkszenia wartoœci pr¹du
wyjœciowego systemu, powo-
duje powstanie szeregu proble-
mów zwi¹zanych z ich prawid-
³owym wspó³dzia³aniem.
Ka¿dy z zasilaczy jest wyposa-
¿ony we w³asny regulator na-
piêcia i pr¹du wyjœciowego,
i ka¿dy regulator ma trochê in-
ne nastawy wartoœci regulowa-
nych. Zmiany temperatury pra-
cy powoduj¹ dodatkowy dryft
tych wartoœci. Konsekwencj¹
jest wzajemne oddzia³ywanie
zasilaczy zale¿ne od zastoso-
wanych uk³adów wyrównywa-
nia pr¹dów.
t
Bez dodatkowych uk³adów
wyrównywania pr¹dów – za-
silacz o najwy¿szej zadanej
wartoœci napiêcia usi³uje sta-
bilizowaæ napiêcie wyjœciowe
systemu. W miarê zwiêksza-
nia obci¹¿enia dochodzimy do
wartoœci ograniczenia pr¹do-
wego pierwszego zasilacza.
Przechodzi on do stanu stabi-
lizacji w³asnego pr¹du wyjœ-
ciowego, a o napiêciu wyjœ-
ciowym systemu decyduje
nastêpny zasilacz, o najwy¿-
szym z pozosta³ych napiêciu
wyjœciowym. Dalsze zwiêk-
szanie pr¹du obci¹¿enia sys-
temu powoduje wejœcie do
pracy kolejnego zasilacza
o mniejszym zadanym napiê-
ciu wyjœciowym. Czêœæ zasi-
laczy pracuje z maksymalnym
pr¹dem wyjœciowym – jeden
reguluje napiêcie wyjœciowe,
pozosta³e pracuj¹ z mniej-
szym obci¹¿eniem.
t
Pasywne wyrównanie pr¹dów
– zasilacze s¹ wyposa¿one
w wyjœciowe rezystory do wy-
równywania pr¹dów. Ró¿nice
wartoœci zadanych napiêæ
wyjœciowych odk³adaj¹ siê
na rezystorach wyrównaw-
czych. WielkoϾ rezystancji
decyduje o ró¿nicach pr¹dów
poszczególnych zasilaczy.
Zwiêkszanie wartoœci rezys-
tancji powoduje zmniejszenie
ró¿nic pr¹dów poszczegól-
nych zasilaczy, przy jedno-
czesnym wzroœcie strat mocy
na rezystorach wyrównaw-
czych. W miarê zwiêkszania
obci¹¿enia systemu rosn¹
pr¹dy poszczególnych zasila-
czy.
t
Aktywne analogowe wyrów-
nywanie pr¹dów – mo¿e byæ
zrealizowane na dwa sposoby.
Pierwszy z nich, ze steruj¹c¹
jednostk¹ centraln¹, porów-
nuje wartoœci pr¹dów wyjœ-
ciowych poszczególnych zasi-
laczy z odpowiadaj¹c¹ war-
toœci¹ zadan¹. Ró¿nice pr¹-
dów powoduj¹ powstanie syg-
na³u b³êdu. Sygna³ ten kory-
guje zadane napiêcie wyjœcio-
we zasilaczy, powoduj¹c wy-
równanie pr¹dów poszczegól-
nych modu³ów. Uk³ad wyma-
ga dodatkowych po³¹czeñ po-
miêdzy jednostk¹ centraln¹
i zasilaczami, u¿ywanych do
wyrównywania pr¹dów. Drugi
uk³ad – z active current sha-
ring – ró¿ni siê od pierwszego
brakiem jednostki centralnej.
Informacja o wielkoœci pr¹du
wyjœciowego i iloœci zasilaczy
pochodzi bezpoœrednio z po-
³¹czeñ poszczególnych zasi-
laczy. Korekcja napiêcia zasi-
laczy jest wykonywana na
podstawie informacji o pr¹dzie
wyjœciowym przypadaj¹cym
na poszczególne zasilacze.
t
Aktywne cyfrowe wyrówny-
wanie pr¹dów – uk³ad dzia-
³a podobnie do uk³adu ak-
tywnego, analogowego wyrów-
nywania pr¹dów. Jedynie do
po³¹czeñ miêdzy zasilaczami
u¿yto ³¹czy cyfrowych odpor-
niejszych na zak³ócenia.
Mo¿liwa jest jednoczesna
zmiana nastaw wszystkich za-
silaczy poprzez ³¹cze cyfro-
we.
nara¿enia
Systemy zasilania gwaranto-
wanego s¹ poddawane dzia³aniu
wielu czynników zewnêtrznych
maj¹cych wp³yw na poziom ich
bezpieczeñstwa pracy. Podstawo-
wym zak³óceniem s¹ przepiêcia
wystêpuj¹ce w sieci energetycz-
nej oraz w sieci rozdzielczej na-
piêcia sta³ego. Przepiêcia te, po-
chodz¹ce od wy³adowañ atmos-
ferycznych i przepiêæ komutacyj-
nych, wywo³uj¹ stresy mecha-
niczne i elektryczne, powoduj¹ce
degradacjê podzespo³ów zasila-
czy. Do grupy nara¿eñ mo¿emy
równie¿ zaliczyæ stresy spowodo-
wane zmianami temperatur urz¹-
dzeñ (wywo³anymi zmianami
zewnêtrznymi lub zmianami ob-
ci¹¿enia), zmiany wilgotnoœci,
zagro¿enia organiczne, takie jak
grzyby, pleœnie czy gryzonie.
Osobn¹ grupê stanowi¹ b³êdy
zwi¹zane z czynnikiem ludzkim:
b³êdy operatora systemu, b³êdy
systemowe powsta³e podczas
procesu projektowania. Wszystkie
nara¿enia w zale¿noœci od czês-
totliwoœci ich wystêpowania, jak
i wielkoœci energii powoduj¹cej
stres, zmniejszaj¹ poziom bezpie-
czeñstwa systemu. Dwa iden-
tyczne urz¹dzenia bêd¹ cecho-
wa³y siê zupe³nie ró¿nym pozio-
mem bezpieczeñstwa w zale¿-
noœci od œrodowiska w jakim pra-
cuj¹.
43
2/2003
www.elektro.info.pl

44
www.elektro.info.pl
2/2003
redundancja
w uk³adach
zasilania
W sytuacji, gdy pojedynczy
element lub ca³y system, ma
zbyt du¿y wspó³czynnik awaryj-
noœci, stosuje siê zwielokrotnie-
nie krytycznych elementów lub
ca³ych systemów tak, aby otrzy-
mana struktura zapewni³a wy-
magany poziom bezawaryjnej
pracy. W zale¿noœci od stopnia
zwielokrotnienia podzespo³ów,
jak i struktury funkcjonalnej, mo-
¿emy mówiæ o uk³adach:
Rezerwa zimna: uk³ad jest
zasilany ze Ÿród³a podstawowe-
go. W przypadku jego niespraw-
noœci do pracy jest uruchomiany
uk³ad zapasowy, a nastêpnie ob-
ci¹¿enie jest prze³¹czane na uk-
³ad zapasowy. W czasie bezawa-
ryjnym uk³ad zapasowy pozosta-
je wy³¹czony.
Rezerwa gor¹ca: uk³ad jest
zasilany ze Ÿród³a podstawowe-
go. Uk³ad zapasowy pracuje
w stanie nieobci¹¿onym. W przy-
padku niesprawnoœci uk³adu
podstawowego nastêpuje natych-
miastowe prze³¹czenie na uk³ad
rezerwowy.
Redundancja n+1: uk³ad jest
zasilany z n+1 równolegle po³¹-
czonych modu³ów. Ka¿dy z nich
jest obci¹¿ony moc¹
n/(n+1)*P
zn
. Moc ta dla du¿ej
liczby modu³ów jest bliska mocy
znamionowej. W przypadku awa-
rii jednego z modu³ów pozosta³e
przejmuj¹ ca³e obci¹¿enie. Od
tego momentu pracuj¹ one ka¿-
dy z moc¹ znamionow¹.
Redundancja 1+1: uk³ad jest
zasilany z dwóch równolegle po-
³¹czonych modu³ów. Ka¿dy
z nich jest obci¹¿ony po³ow¹
mocy znamionowej. W przypadku
awarii jednego z modu³ów pozos-
ta³y przejmuje ca³e obci¹¿enie
pracuj¹c dalej z moc¹ znamiono-
w¹.
ograniczenie
napiêcia
na szynach DC
Napiêcie ³adowania pojedyn-
czego ogniwa podczas pracy bu-
forowej w temperaturze 20°C
wynosi 2,23 V do 2,27 V, w za-
le¿noœci od typu ogniwa. W sys-
temie 220 V, przy 108 ogniwach,
otrzymujemy napiêcie z przed-
zia³u 241 do 245 V. Napiêcie to
wzrasta wraz ze zmniejszaniem
temperatury i przy zerowej tem-
peraturze mo¿e wynieœæ 253 V.
Czêœæ odbiorników energii do-
puszcza jedynie 10% wzrost na-
piêcia zasilaj¹cego, tj. 242 V.
W celu obni¿enia napiêcia, na
szynach DC stosuje siê uk³ady
ograniczenia napiêcia zasilaj¹ce-
go: tzw. przeciwogniowo w u k ³ a-
dach o ma³ej mocy wyjœciowej
oraz uk³ad z bateri¹ dodawcz¹,
w przypadku du¿ej mocy wyjœ-
ciowej. Istotne jest stosowanie
diod pó³przewodnikowych o do-
puszczalnej wartoœci ca³ki ciep-
lnej, znacznie wiêkszej od ca³ki
cieplnej najwiêkszego bezpiecz-
nika w obwodach dystrybucji
energii. Dotyczy to wszystkich
diod stosowanych w obwodach
rozdzielni pr¹du sta³ego.
Wiele systemów zasilania ba-
teryjnego wyposa¿a siê w wy-
³¹czniki podnapiêciowe, od³¹-
czaj¹ce odbiory w przypadku
zbyt niskiego napiêcia baterii
akumulatorów. Rozwi¹zanie ma-
j¹ce na celu ochronê akumulato-
rów przed zbyt g³êbokim roz³a-
dowaniem mo¿e przy b³êdnym
dzia³aniu staæ siê przyczyn¹ po-
wa¿nej awarii (od³¹czenie
wra¿liwych odbiorów). Od³¹cz-
nik podnapiêciowy nale¿y wyko-
naæ z uwzglêdnieniem redun-
dancji styczników w obwodzie
g³ównym oraz redundancji uk³a-
dów pomiarowych napiêcia bate-
rii. Sygna³y pomiarowe napiêcia
baterii nale¿y mierzyæ mo¿liwie
blisko zacisków baterii. W prze-
ciwnym razie, podczas przep³y-
wu pr¹du zwarciowego lub rozru-
chowego w obwodach obci¹¿e-
nia, uk³ad pomiarowy zmierzy
napiêcie pomniejszone o spadek
napiêcia na torze pr¹dowym.
Mo¿e to doprowadziæ do b³êd-
nego wy³¹czenia odbiorów. Z te-
go samego wzglêdu modu³ po-
miaru napiêcia powinien byæ wy-
posa¿ony w zw³okê czasow¹,
eliminuj¹c¹ wy³¹czenia spowo-
dowane pr¹dami impulsowymi.
Oba styczniki powinny posiadaæ
styki kontrolne. Wy³¹czenie jed-
nego ze styczników musi wywo-
³aæ alarm „nie pilny”, a obydwu
„pilny”. Dla poprawnej pracy za-
bezpieczenia jest konieczne, aby
oba styczniki dzia³a³y popraw-
nie przy zasilaniu poni¿ej 60%
napiêcia znamionowego. Proble-
mu poprawnej pracy styczników
przy obni¿onych napiêciach za-
silania mo¿na unikn¹æ stosuj¹c
wy³¹czniki z napêdem mecha-
nicznym.
literatura
1. Baranecki A., Niewiadomski M.,
Problemy gwarantowanego zasila-
nia napiêciem sta³ym i przemien-
nym, Automatyka Elektroenerge-
tyczna nr 4/1996.
2. Bentley J., Reliability & quality engi-
neering.
3. JaŸwiñski J., Wa¿yñska-Fiok K.,
Bezpieczeñstwo systemów PWN,
1993.
4. Warda W., NiezawodnoϾ syste-
mów zasilania napiêciem gwaranto-
wanym, Elektronizacja nr 12/97.
5. Warda W., Systemy o podwy¿szo-
nej niezawodnoœci – przyk³adowe
rozwi¹zania, III Konferencja Syste-
my gwarantowanego zasilania w in-
stalacjach energetycznych, Szczyrk
1998.
6. Warda W., Systemy zasilania pr¹du
sta³ego o podwy¿szonej nieza-
wodnoœci, IV Konferencja Systemy
gwarantowanego zasilania w insta-
lacjach energetycznych, Szczyrk
1999.
7. Warda W., Analiza porównawcza
podstawowych struktur zasilania
gwarantowanego, konferencja
Szklarska Porêba 1999.
8. Warda W., Wspó³czesne konstruk-
cje systemów zasilania pr¹dem
sta³ym.
9. J.-N. Fiorina, Onduleurs et harmoni-
ques (cas des charges non linea-
ries), Cahier Technique Schneider
Electric, 06/92.
10. S.Logiaco, Electrical installation de-
pendability studies, Cahier Techni-
que Schneider Electric, 09/97.
11. G.Gatine, High availability electrical
power distribution, Cahier Techni-
que Schneider Electric, 10/91.
12. R.Calvas,B.Lacroix, Earthing sys-
tems worldwide and evolutions, Ca-
hier Technique Schneider Electric,
09/95.
Wyszukiwarka
Podobne podstrony:
ei 02 2003 s22 24
ei 02 2003 s51
ei 02 2003 s66 67
ei 02 2003 s04
ei 02 2003 s47 50
ei 02 2003 s72 74
ei 02 2003 s62 65
ei 02 2003 s03
ei 02 2003 s06 10
ei 02 2003 s68 69
ei 02 2003 s75
ei 02 2003 s76
ei 02 2003 s55 61
ei 02 2003 s26 30
ei 02 2003 s70 71
ei 02 2003 s14 19
ei 02 2003 s20 21
ei 02 2003 s77
ei 02 2003 s25
więcej podobnych podstron