
Politechnika Białostocka
Wydział Elektryczny
Katedra Automatyki i Elektroniki
Instrukcja
do ćwiczeń laboratoryjnych z przedmiotu:
ELEKTRONIKA ENS1C300 022
TRANZYSTORY JAKO ELEMENTY DWUSTANOWE
BIAŁYSTOK 2013
WST
Ę
P
Elementy wykonawcze układów elektronicznych są zwykle zakończeniem toru
sygnałowego tych układów. Elementy te zgodnie z sygnałem elektrycznym
powodują zmiany wielości fizycznych ( położenie, prędkość, temperatury,
ciśnienia jasności itd.).
W niektórych zastosowaniach wymaga się płynnej zmiany tych
wielkości. Związane to jest ze zmianą przepływu energii (płynna regulacja mocy
dostarczanej do obciążenia)
W innych przypadkach wystarczy włączenie i wyłączenie przepływu
energii.
Rozróżniamy dwa rodzaje sterowania:
1.
Sterowanie ciągłe, w których sygnał przyjmuje wartości ciągłe w pewnym
zakresie amplitud (regulacja prędkości obrotowej, temperatury itp.).
2.
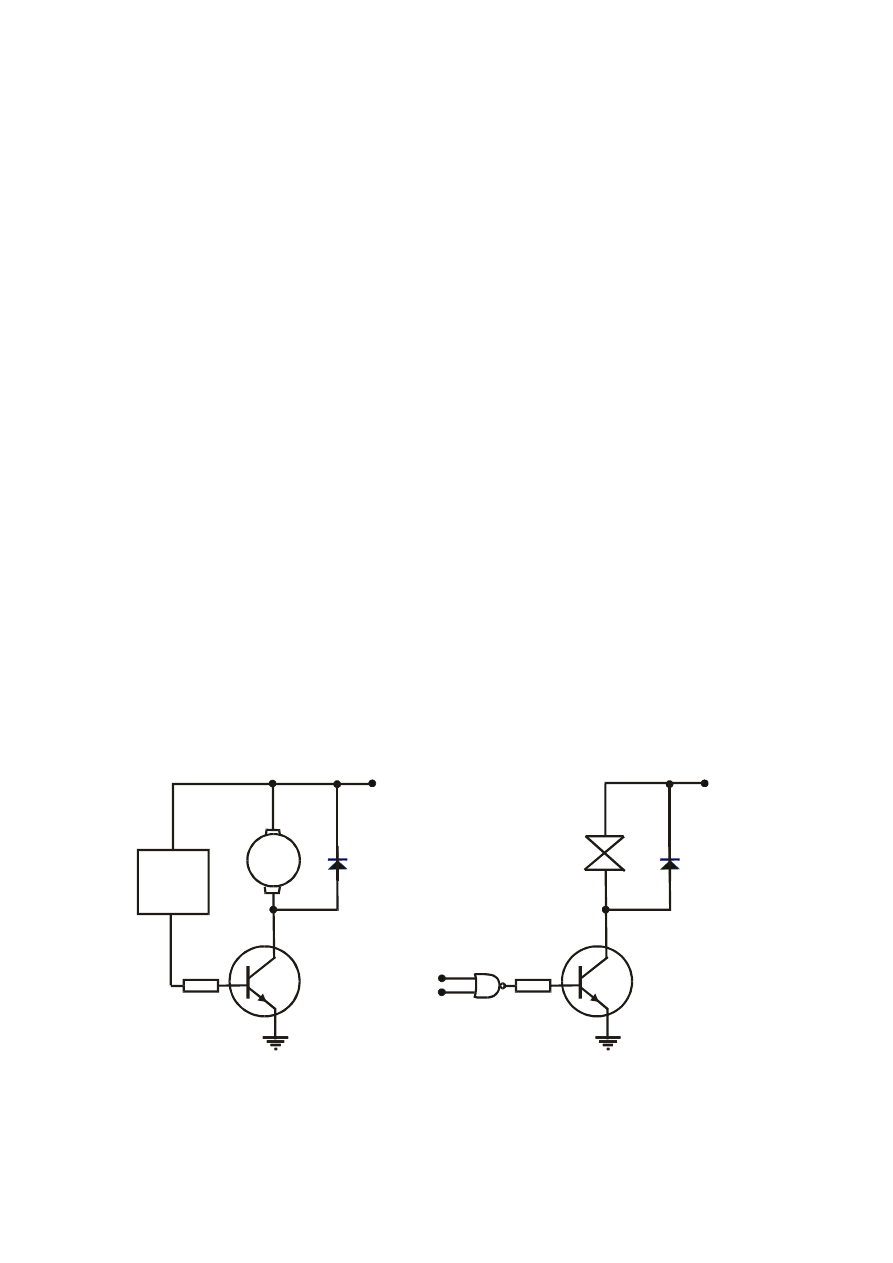
Sterowanie dwustanowe typu włącz–wyłącz służące do włączania i
wyłączania: przekaźników, silniczków prądu stałego, elektrozaworów,
lampek sygnalizacyjnych itp. Przykłady takiego sterowania zostały
zamieszczone na rysunkach 1 – a,b,c.
3.
Sterowanie metodą PWM
Podstawową wadą klasycznego sterowania mocą dostarczaną do obciążenia
jest niska sprawność (znaczna część mocy jest tracona na elemencie
regulacyjnym).
Rb
Uz
Silnik
wentylatora
M
Układ
termometra
Rb
Uz
Elektrozawór
NAND
TTL
Układ
sterowania
a)
b)
Termometr
kontaktowy
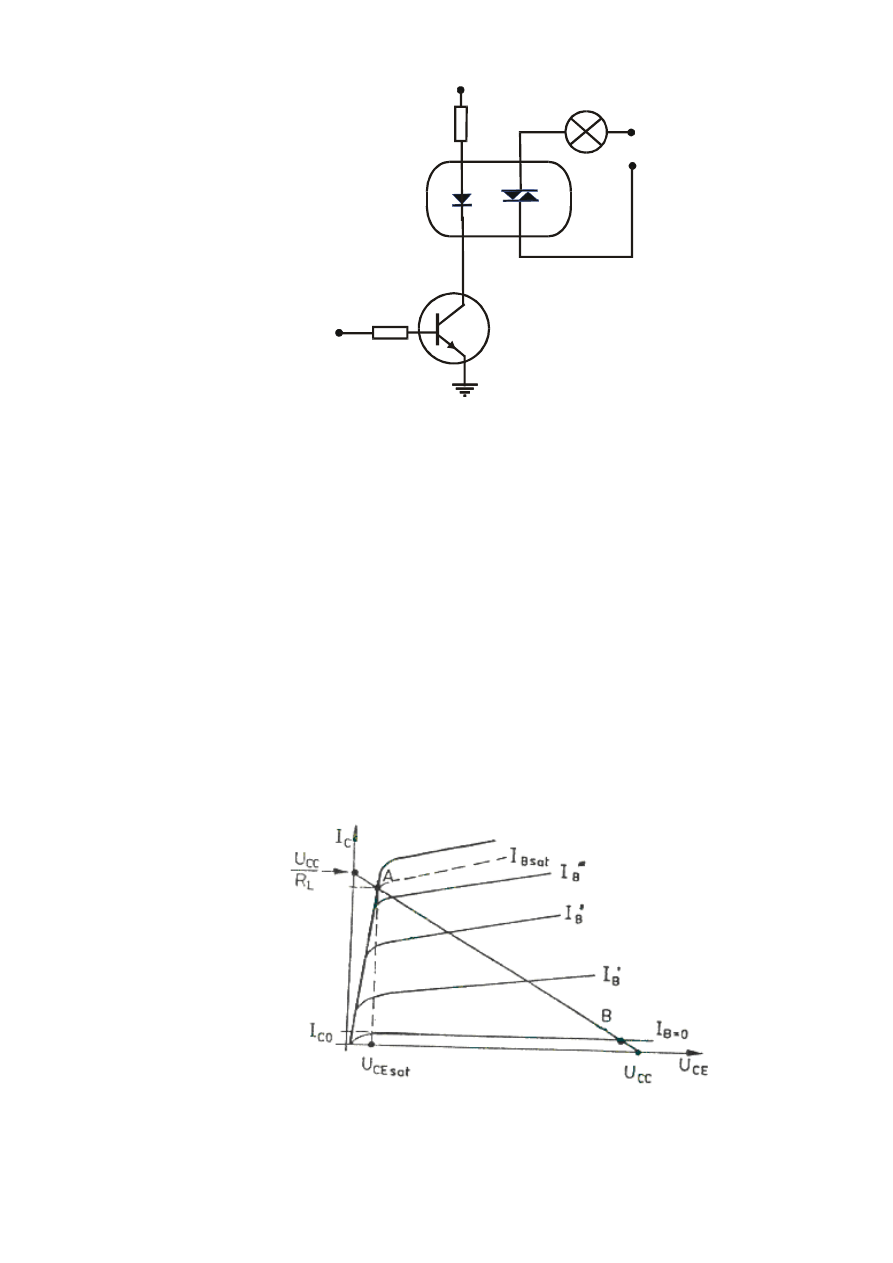
Rb
Rc
+ 5V
220 V
Optotriak
“L” / “H”
z komputera
c)
Rys. 1. Przykłady wyjść dwustanowych układów automatyki.
Jak widać na powyższych przykładach przy sterowaniu dwustanowym
elementami wykonawczymi są zwykle tranzystory.
Tranzystory te w tych układach pełnią rolę klucza (przełącznika)
zwierającego lub rozłączającego obwód, w którym znajduje się element
wykonawczy.
Tranzystory te powinny wytrzymywać maksymalne prądy i napięcia
odpowiednio dobrane ze względu na rodzaj i wielkość obciążenia.
Dlatego też są to najczęściej tranzystory średniej i dużej mocy.
W odróżnieniu od zastosowania tranzystorów we wzmacniaczach, gdzie
punkt pracy dobiera się w obszarze aktywnej pracy tranzystora, przy pracy
dwustanowej tranzystor może znajdować się tylko w dwóch stanach: nasycenia i
zatkania, przy możliwie krótkim czasie przełączania z jednego stanu do
drugiego.
A – stan nasycenia
B – stan zatkania
Rys. 2. Charakterystyka wyjściowa tranzystora bipolarnego
z naniesioną prostą obciążenia.

Sterowanie tranzystorem odbywa się w obwodzie bazy również sygnałem
dwustanowym małej mocy np. sygnałem cyfrowym z układu logicznego, z
komputera poprzez transoptor, mikrowyłącznikiem lub z komparatora.
W
celu
prawidłowego
wysterowania
obwodu
bazy
(pewnego
wprowadzenia tranzystora w stan zatkania lub nasycenia należy uwzględnić
własności elektryczne wyjścia elementu wytwarzającego sygnał sterujący.
Dla przykładu wyjście układu logicznego może znajdować się w stanie
wysokim („H”) lub niskim („L”).
Dla układów serii TTL wartości typowe:
w stanie „H” U
WYJ
≥
3,5 V przy prądzie wypływającym I
OH
≤
4 mA,
w stanie „L” U
WYJ
≤
0,2 V przy prądzie pochłanianym
≤
10 mA.
Dla układów innych serii należy przeanalizować charakterystyki
wyjściowe tych układów.
Dla mikrowyłączników należy przyjąć prąd znacznie mniejszy od
dopuszczalnego, co zapewni dużą niezawodność tych elementów.
Przykłady projektowania będą rozważone podczas ćwiczeń.
Sterowanie dwustanowe tranzystorem stosuje się również przy modulacji
szerokości impulsów (PWM), w celu regulacji średniej mocy dostarczanej do
obciążenia. Sterowanie PWM polega na tym, że tranzystor jest otwierany
impulsami o dość dużej częstotliwości o zmiennej regulowanej szerokości.
Regulując stosunek czasu przewodzenia do całego okresu, (współczynnik
wypełnienia impulsów), można regulować średnią moc od zera do wartości
maksymalnej.
Do
wytworzenia
takich
sygnałów
sterujących
używa
się
wyspecjalizowanych układów scalonych (np. TL494).
Niektóre mikroprocesory mają w swojej strukturze programowalne
wyjście PWM. Zaletą PWM jest wysoka sprawność układu i mała moc tracona
na tranzystorze przy zachowaniu dużych prądów i napięć.
Uwaga: Jeżeli obciążenie ma charakter indukcyjny (przekaźnik, silniki,
elektrozawory) wymagana jest dioda zwrotna zapobiegająca przepięciom na
kolektorze tranzystora.
CEL
Ć
WICZENIA
Celem ćwiczenia jest porównanie sterowania ciągłego mocą dostarczaną
do obciążenia ze sterowaniem metodą PWM.
OBSERWACJE I POMIARY
Ć
wiczenie będzie wykonywane na przygotowanej makiecie:
Makieta zawiera zaciski śrubowe do podłączenia tranzystora mocy w obudowie
TO-220 lub podobnej.
Na makiecie znajduje się również :
Generator PWM i pokrętła do regulacji częstotliwości i wypełnienia .
Trzy wzmacniacze (bufory)do sterowania bazą tranzystora mocy.
Makieta ma autonomiczny zasilacz sieciowy do zasilania generatora i buforów.
Uwaga: Do zasilania obciążenia potrzebny będzie zewnętrzny zasilacz
wysokoprądowy (min 2A 12-30V regulowany).
Pierwszej części ćwiczenia potrzebny będzie zasilacz regulowany mogący
pracować jako źródło prądu o regulowanym prądzie min. 1mA.
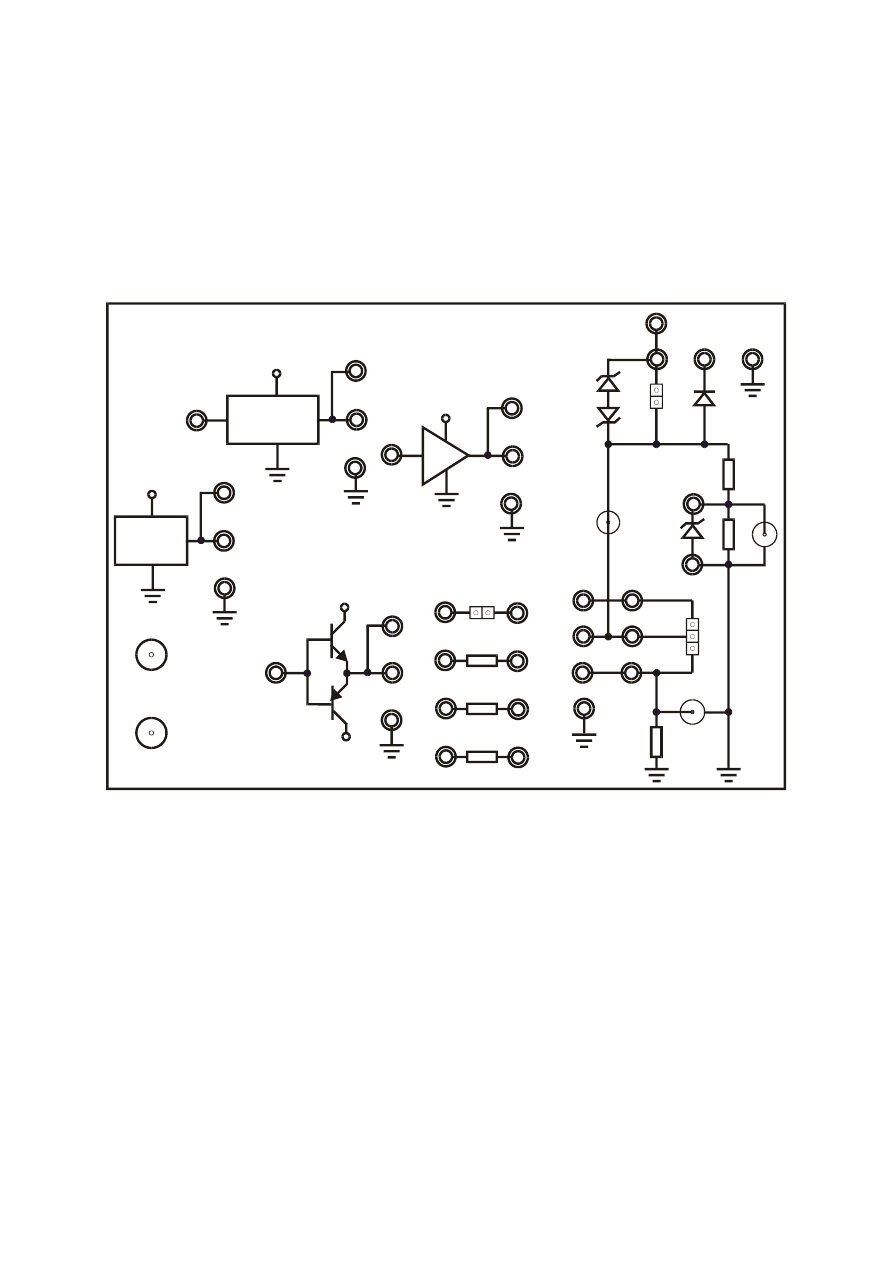
TRANZYSTORY W UKŁADACH DWUSTANOWYCH
wy
+15V
DRIVER
MC34151
we
wy
+15V
GEN
TL494
f
PWM
5
Ω
25
Ω
100
Ω
+Ucc
we
wy
+15V
-5V
T1
T2
we
wy
+15V
6x1/6
4050
O
B
C
DZ1
DZ2
DZ3
D
10k
1k
B
C
E
G
D
S
R
0,1Ω
T3
F 4A
I
U
PRZEBIEG
Ć
WICZENIA
A
. Sterowanie metodą regulacji ciągłej
Do zacisku +Vcc podłączamy zewnętrzny zasilacz ( z wewnętrznym odczytem
prądu ) lub włączamy w szereg amperomierz na zakresie 2A.
Do zacisków śrubowych OBC podłączamy obciążenie: np. żarówkę
samochodową 12V 10 W, lub silniczek DC 12V. Można również użyć rezystora
dużej mocy .
Ze względu na wydzielanie się pewnej mocy na tranzystorze do
tranzystora zaleca się przykręcenie niewielkiego radiatora.
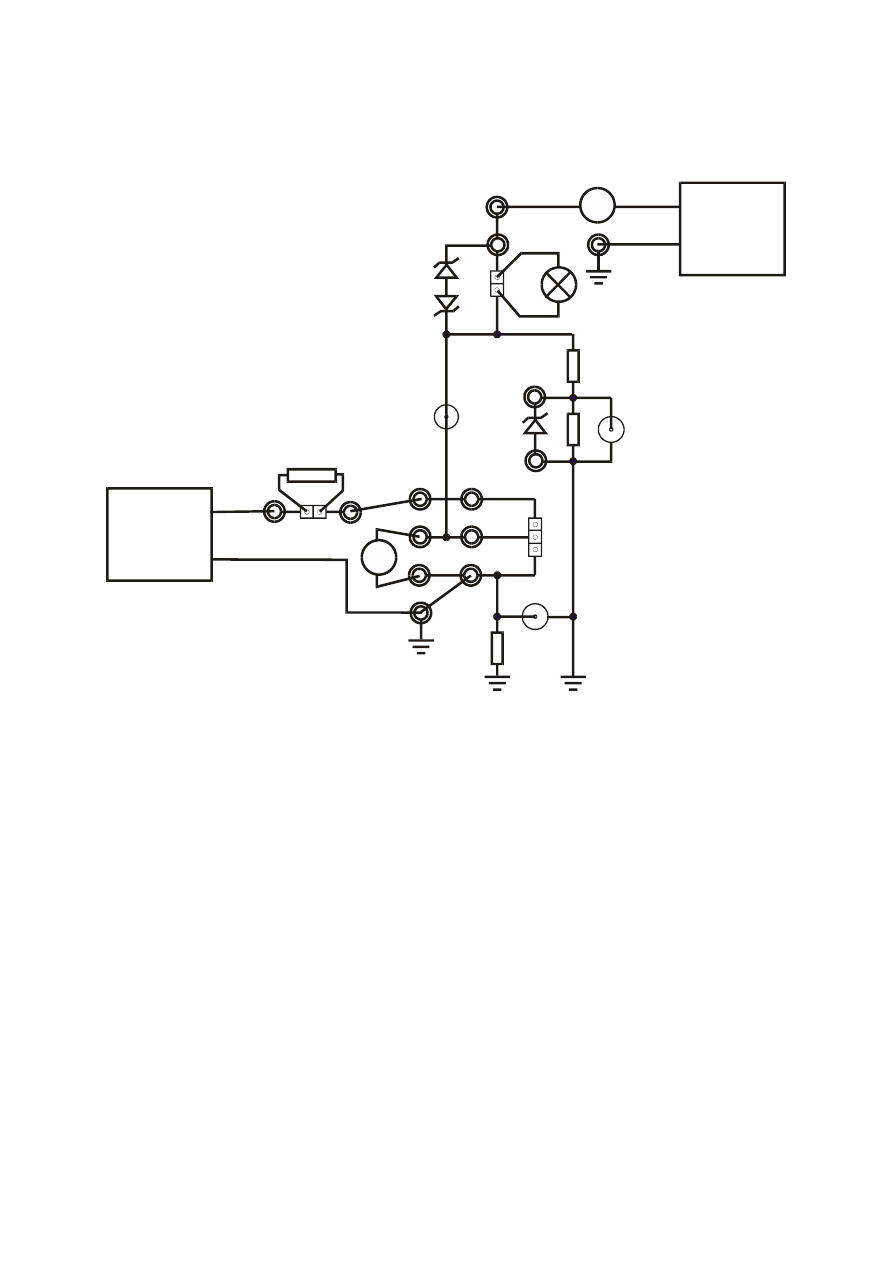
Obwód bazy będzie zasilany z dodatkowego zasilacza małej mocy z
regulacją prądu. W tym celu podłączamy zasilacz poprzez dobrany opornik
(wkręcony do zacisku śrubowego R do bazy tranzystora).
+Ucc
O
B
C
DZ1
DZ2
DZ3
10k
1k
B
C
E
G
D
S
R
0,1Ω
T3
F 4A
I
U
ZASILACZ
12V
+
-
ZASILACZ
12V
+
-
A
V
Od wartości rezystora R i napięcia zasilacza pomocniczego zależeć będzie
prąd bazy i tym samym prąd kolektora.
Rezystor R dobieramy wg następującej zasady:
Szacujemy maksymalny prąd obciążenia (z mocy żarówki, silnika,
rezystancji opornika, będącego obciążeniem).
Przyjmujemy
ββββ
tranzystora mocy 100-150, obliczamy potrzebny prąd bazy.
Przyjmując początkowe ustawienie zasilacza bazowego na 6V (tak aby
można było regulować w górę i w dół), obliczamy potrzebną wartość rezystora
R (nie zapomnieć o U
BE
= 0.7V).
Podkręcamy rezystor do zacisków śrubowych R.
Poprzez regulację napięcia zasilacza zmieniamy prąd bazy od minimalnych
wartości aż do uzyskania nasycenia w obwodzie kolektora (jak to poznać?).
Zapisujemy wartości prądu bazy I
B
, kolektora I
C
i napięcia U
CE
.
Prąd bazy najlepiej odczytywać na wewnętrznym wskaźniku poboru prądu
zasilacza.
Na podstawie zapisanych pomiarów należy określić:

•
Zależność mocy wydzielonej na tranzystorze od wysterowania (I
B
).
•
Zależność mocy dostarczonej do obciążenia od wysterowania (I
B
).
•
Zależność sprawności przekazywania energii z zasilacza głównego do
obciążenia od wysterowania (I
B
).
(Prąd żarówki odczytać z amperomierza w zasilaczu).
•
Zależność prądu kolektora od prądu bazy. Na wykresie pokazać miejsce
wejścia tranzystora w nasycenie.
•
Określić
β
tranzystora w obszarze aktywnym(jeżeli
β
nie jest stałe to
dlaczego?) .
•
Określić moc, przy pracy dwustanowej (P
nas
; P
zat
).
Sformułować wnioski.
B
. Sterowanie metodą PWM
1.
Zamiast zasilacza bazowego do bazy podłączyć układ generatora PWM
poprzez dowolny bufor i rezystor R
a)
Regulując potencjometrem w zadajniku PWM obserwować zmiany
w świeceniu lampki.
b)
Zaobserwować i przerysować z oscyloskopu przebiegi napięcia
sterującego i napięcia na kolektorze. Określić czasy narastania i
opadania napięcia na kolektorze.
c)
Zamiast lampki podłączyć mały silniczek prądu stałego (nie
zapomnieć o diodzie zwrotnej) i regulować prędkość obrotową.
d)
Sprawdzić czy tranzystor mocno się nagrzewa i porównać z
nagrzewaniem się przy pracy ciągłej.
Wymagania BHP
Warunkiem przystąpienia do praktycznej realizacji ćwiczenia jest
zapoznanie się z instrukcją BHP, obowiązującą w laboratorium, oraz
przestrzeganie zasad w niej zawartych.
Zagadnienia:
1.
Przy jakim wysterowaniu na tranzystorze wydziela się największa
moc?
2.
Jak poznać że tranzystor jest w nasyceniu?
3.
Dlaczego ze wzrostem częstotliwości PWM tranzystor, będzie coraz
bardziej się nagrzewać ?
4.
Dlaczego jeśli obciążeniem jest silniczek DC konieczna jest dioda
zwrotna
5.
Jakie zalety ma sterowanie PWM w stosunku do regulacji ciągłej ?
Wyszukiwarka
Podobne podstrony:
EN Tranzystory jako elementy dw Nieznany
juniewicz,elektrotechnika L, Tranzystor jako element elektroniczny spr
Wsparcie jako element procesu pielęgnowania wykład ppt
Promocja jako element marketingu mix
polityka cen jako element marketingu, Marketing
Służba wojskowa jako element dobra wspólnego, Konspekty, KO-Ksztalcenie Obywatelskie
Motywacja jako element zarządzania zasobami ludzkimi(1), Zarzadznie
Komórka jako elementarna jednostka strukturalna i funkcjonalna organizmu
Promocja jako element marketingu mix (3)
Kultura jako element kontroli społecznej
Motywacja jako element zarządzania zasobami ludzkimi (11 str KQEKCU2MQQ3LR7GAO7LCZHY2WNWGS4N5HX5YYPQ
Promocja jako element marketingu mix (6)
Promocja jako element marketingu (2)
Praca Dyplomowa Motywowanie Jako Element ZarzÄ…dzania Zasobami Ludzkimi Na PrzykĹ‚adzie Trasko â€
Produkt jako element marketingu
93 tranzystor jako czwórnik
Janeczko ŚCIEŻKI EDUKACYJNE JAKO ELEMENT REKREACYJNEGO ZAGOSPODAROWANIA LASU
Narkotyki jako element młodzieżowej kultury - racjonalista.pl, Studia pedagogika res
więcej podobnych podstron