„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Krzysztof Król
Rozpoznawanie elementów maszyn i mechanizmów
711[03].O1.04
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
dr inż. Andrzej Figiel
dr inż. Marek Młyńczak
Opracowanie redakcyjne:
mgr Janusz Górny
Konsultacja:
mgr Janusz Górny
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 711[03].O1.04
„Rozpoznawanie elementów maszyn i mechanizmów”, zawartego w modułowym programie
nauczania dla zawodu górnik odkrywkowej eksploatacji złóż.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Podstawy mechaniki i wytrzymałości materiałów
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
20
4.1.3. Ćwiczenia
20
4.1.4. Sprawdzian postępów
24
4.2. Połączenia rozłączne i nierozłączne
25
4.2.1. Materiał nauczania
25
4.2.2. Pytania sprawdzające
31
4.2.3. Ćwiczenia
32
4.2.4. Sprawdzian postępów
34
4.3. Części maszyn i mechanizmów
35
4.3.1. Materiał nauczania
35
4.3.2. Pytania sprawdzające
50
4.3.3. Ćwiczenia
51
4.3.4. Sprawdzian postępów
54
5. Sprawdzian osiągnięć
55
6. Literatura
60

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten będzie Ci pomocny w przyswajaniu wiedzy, dotyczącej rozpoznawania
elementów maszyn i mechanizmów.
W poradniku zamieszczono:
−−−−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z Poradnika,
−−−−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
–
materiał nauczania – wiadomości teoretyczne niezbędne do osiągnięcia założonych celów
kształcenia i opanowania umiejętności zawartych w jednostce modułowej,
–
zestaw pytań, abyś mógł sprawdzić, czy już opanowałeś określone treści,
–
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
–
sprawdzian postępów,
–
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
–
literaturę uzupełniającą.
Miejsce jednostki modułowej w strukturze modułu 711[03].O1 „Techniczne podstawy
zawodu” jest wyeksponowane na schemacie zamieszczonym na stronie 4.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp
i instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Wiadomości,
dotyczące przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska znajdziesz w jednostce modułowej 711[03].O1.01 „Przestrzeganie zasad
bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej i ochrony środowiska”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
711[03].O1
Techniczne podstawy zawodu
711[03].O1.01
Stosowanie przepisów bezpieczeństwa i higieny pracy, ochrony
przeciwpożarowej i ochrony środowiska
711[03].O1.02
Posługiwanie się dokumentacją
techniczną
711[03].O1.03
Stosowanie materiałów konstrukcyjnych
i eksploatacyjnych
711[03].O1.04
Rozpoznawanie elementów maszyn
i mechanizmów
711[03].O1.05
Analizowanie układów elektrycznych
i automatyki przemysłowej
711[03].O1.06
Stosowanie podstawowych technik wytwarzania
części maszyn

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu jednostki modułowej powinieneś umieć:
−
przestrzegać zasad bezpiecznej pracy, przewidywać zagrożenia i zapobiegać im,
−
stosować jednostki układu SI,
−
wyjaśnić oznaczenia stosowane na rysunku technicznym maszynowym,
−
posługiwać się dokumentacją techniczną, Dokumentacją Techniczno-Ruchową, normami
i katalogami,
−
selekcjonować, porządkować i przechowywać informacje,
−
interpretować związki wyrażone za pomocą wzorów, wykresów, schematów, diagramów,
tabel,
−
korzystać z komputera,
−
współpracować w grupie,
−
zorganizować stanowisko pracy zgodnie z wymogami ergonomii.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
określić warunki równowagi ciała sztywnego,
−
wyjaśnić pojęcia: prędkość obwodowa, prędkość obrotowa, praca mechaniczna, moc,
energia i sprawność,
−
rozróżnić proste przypadki obciążeń elementów konstrukcyjnych,
−
rozróżnić rodzaje naprężeń i odkształceń występujące podczas pracy maszyn i urządzeń,
−
rozróżnić rodzaje połączeń rozłącznych i nierozłącznych,
−
scharakteryzować osie i wały maszynowe,
−
scharakteryzować budowę i rodzaje łożysk tocznych i ślizgowych,
−
dobrać z katalogu na podstawie oznaczenia łożyska toczne,
−
scharakteryzować rodzaje sprzęgieł,
−
sklasyfikować hamulce i określić ich przeznaczenie,
−
sklasyfikować przekładnie mechaniczne,
−
wyjaśnić budowę przekładni zębatych,
−
obliczyć przełożenie przekładni,
−
wyjaśnić budowę i określić zastosowanie mechanizmów,
−
odczytać rysunki zestawieniowe zespołów i podzespołów maszyn, ustalić działanie
i określić elementy składowe,
−
dobrać części maszyn z katalogów,
−
skorzystać z dokumentacji technicznej, PN, katalogów.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
4.
MATERIAŁ NAUCZANIA
4.1. Podstawy mechaniki i wytrzymałości materiałów
4.1.1. Materiał nauczania
Teoretyczne modele ciał
Części maszyn mają różne kształty. W mechanice technicznej, aby wykonać obliczenia,
musimy dokonać pewnych uproszczeń – posłużyć się tzw. „modelami ciał”.
Możemy wyróżnić następujące modele ciał:
–
punkt materialny – jest to punkt geometryczny, w którym skupiona jest cała masa,
–
ciało sztywne – jest to układ punktów materialnych ze sobą związanych (odcinek będzie
modelem belki),
–
ciało sprężyste – jest to ciało, które pod wpływem sił zewnętrznych odkształca się, a po
odjęciu siły powraca do swojej pierwotnej postaci,
–
ciało sprężysto–plastyczne – jest to ciało, które pod wpływem sił zewnętrznych
odkształca się, a po odjęciu sił nie powraca całkowicie do swojej pierwotnej postaci.
Częściowo odkształca się sprężyście, a częściowo plastycznie.
Działania na wektorach
W mechanice technicznej mamy do czynienia z wielkościami takimi jak: czas, siła,
prędkość, przyspieszenie, praca. Wielkości te możemy podzielić na:
–
wielkości skalarne (skalary) – czas, temperatura, praca, moc,
–
wielkości wektorowe (wektory) – siła, prędkość, przyspieszenie.
O ile skalarom możemy przypisać tylko pewną wartość liczbową (temperatura 50°C,
to wektorom przypisujemy wartość liczbową (moduł), kierunek działania i zwrot. Wektor
oznaczamy tak, jak przedstawiono to na rysunku 1.
Rys. 1. Graficzne przedstawienie wektora
Dodawanie skalarów przeprowadza się wykonując zwykłe działanie matematyczne. Na
przykład suma dwóch temperatur będzie wynosiła: 50°C + 30°C = 80°C.
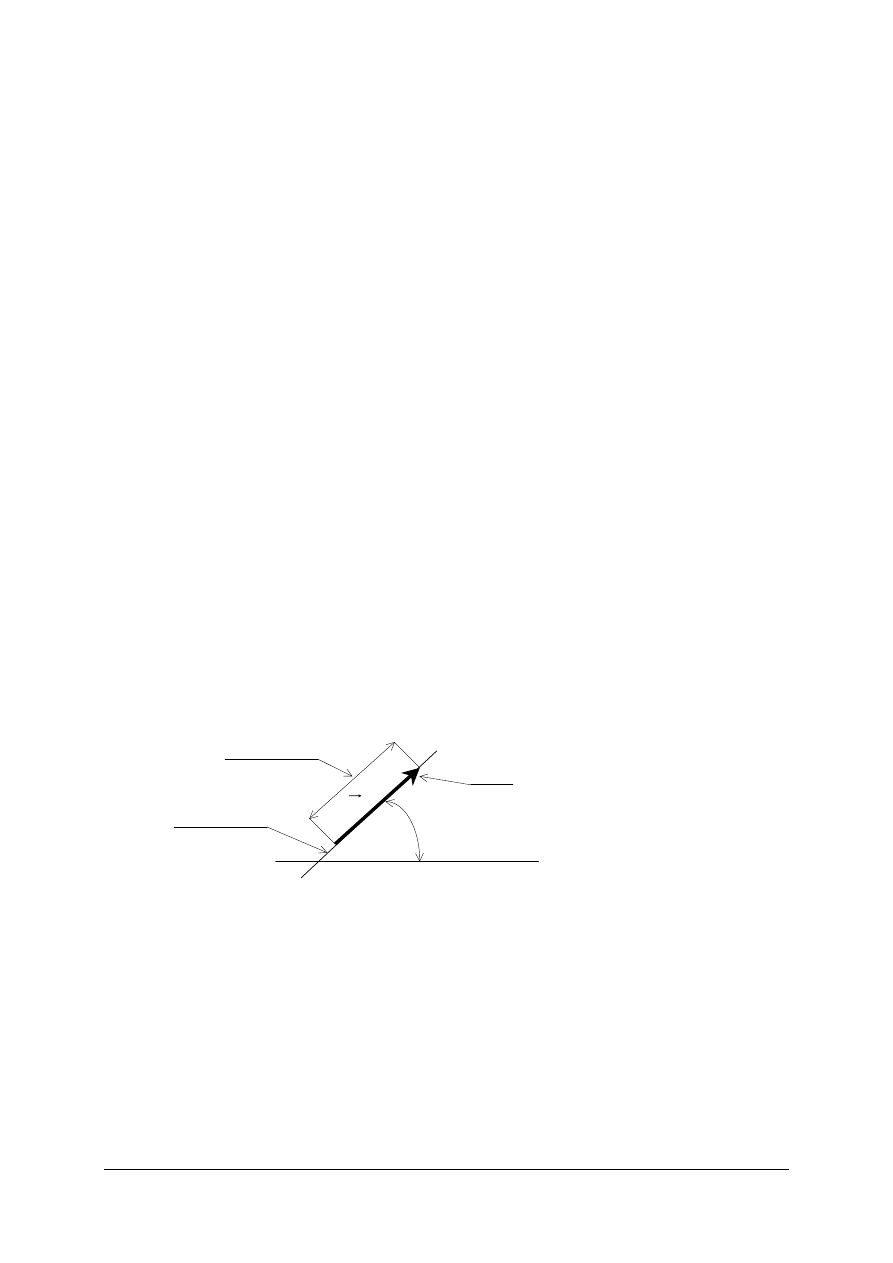
W przypadku wektorów posiadających wartość (moduł) kierunek i zwrot dodawanie
wektorów możemy przeprowadzić metodą geometryczną. Dodawanie geometryczne
przedstawione jest na rysunku 2. Przyjmujemy określoną podziałkę, tak aby długość wektora
oznaczała jego moduł. Następnie do końca pierwszego wektora dorysowujemy następny
wektor. Moduł wektora sumy odczytujemy mierząc długość i mnożąc przez podziałkę. Innym
sposobem obliczenia modułu jest obliczenie za pomocą wzoru podanego na rysunku 2.
Wartość (moduł)
Kierunek
Zwrot
A
α
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
Przy dodawaniu wektorów nie ma znaczenia ich
kolejność.
Dodawać
możemy
dowolną
liczbę
wektorów.
Rys. 2. Geometryczne dodawanie wektorów oraz analityczne obliczenie sumy wektorów
Różnica wektorów (odejmowanie wektorów) równa się sumie wektora pierwszego
i drugiego ze zwrotem przeciwnym.
Rys. 3. Odejmowanie wektorów
Podział sił
Występujące w mechanice siły możemy podzielić na siły wewnętrzne i siły zewnętrzne.
Siły wewnętrzne podzielić możemy na siły międzycząsteczkowe (działające pomiędzy
cząsteczkami materiału) oraz siły napięcia (siły wewnętrzne działające na skutek przyłożenia
sił zewnętrznych, np. siły wewnątrz drutu sprężyny, siła napięcia linki, na której zaczepiono
ciężar).
Siły zewnętrzne podzielić możemy na czynne i reakcje. Przedstawia to rysunek 4, na
którym ciało położone na płaszczyźnie wywiera na podłoże siłę czynną F, a podłoże
przeciwstawia temu reakcję R.
Rys. 4. Graficzne przedstawienie siły czynnej F i reakcji R
Wartość siły możemy obliczyć mnożąc masę ciała przez jego przyspieszenie.
F = m · a [N]
[N] = [kg · m/s
2
] – niuton
lub w przypadku ciężarów:
G = m · g [N]
g = 9,81 m/s
2
– przyspieszenie ziemskie.
[S]
2
= | A
2
| + | B
2
| – 2 | A x B | cos (A,B)
przy czym: (A,B) – kąt zawarty pomiędzy wektorami A i B
A
B
S
A
B
B
A
S
++++
====
S
A
B
A
B
S
(((( ))))
B
–
A
S
++++
====
F
R
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Więzy i ich reakcje
Ciała możemy podzielić na ciała swobodne i ciała nieswobodne. Ciała swobodne nie
mają ograniczonej swobody ruchu, na przykład kamień lecący w powietrzu. Ciała
nieswobodne to takie, których swoboda ruchu została ograniczona czynnikami zewnętrznymi,
na przykład przedmiot leżący na stole ma ograniczony ruch w dół. Ograniczenie to powoduje
blat stołu. Czynniki ograniczające ruch nazywamy więzami (w przypadku stołu więzem jest
blat stołu).
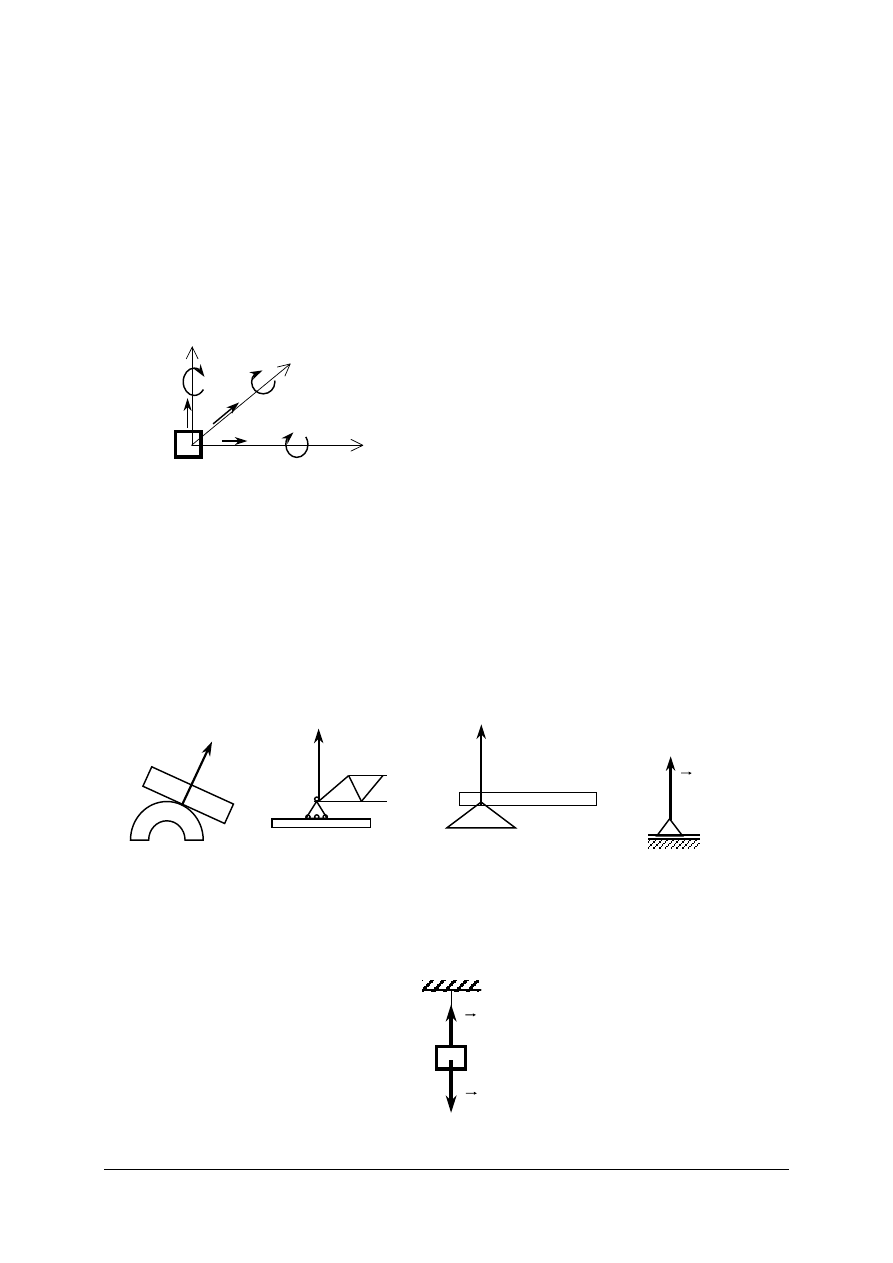
Ciała swobodne posiadają sześć stopni swobody. Są to przesunięcia na boki, przesunięcia
w przód i w tył oraz trzy obroty. Graficznie przedstawiono to na rysunku 5.
Stopnie swobody:
1. Ruch wzdłuż osi „x”.
2. Ruch wzdłuż osi „y”.
3. Ruch wzdłuż osi „z”.
4. Obrót wokół osi „x”.
5. Obrót wokół osi „y”.
6. Obrót wokół osi „z”.
Rys. 5. Graficzne przedstawienie stopni swobody
Przykładem odebrania jednego stopnia swobody jest zaczepienie ciężaru na linie. Lina
odbiera jeden stopień swobody ruch w dół. Pozostałe stopnie nie są odebrane. Ciężar może się
przemieszczać na boki, w przód i tył, obracać wokół osi pionowej (x), poziomej (y)
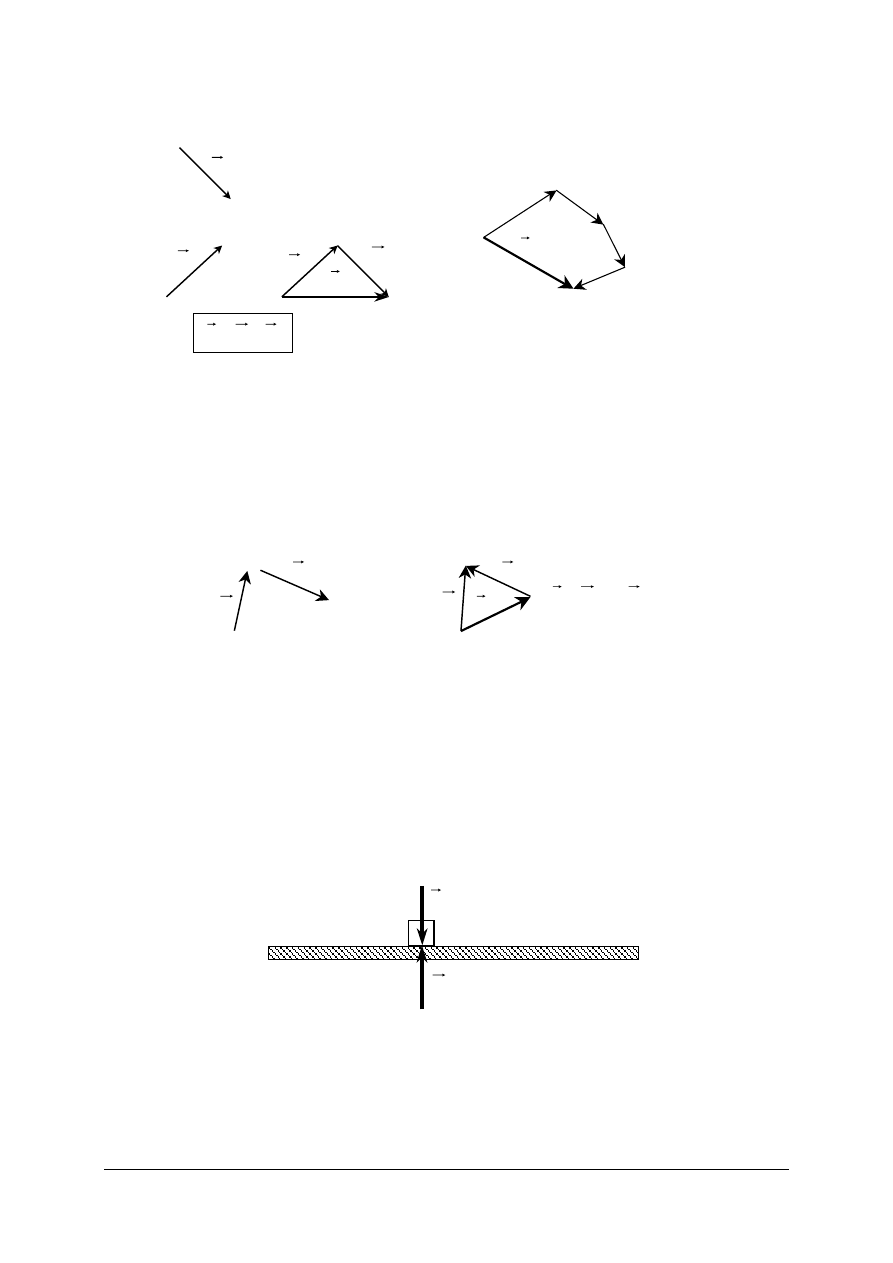
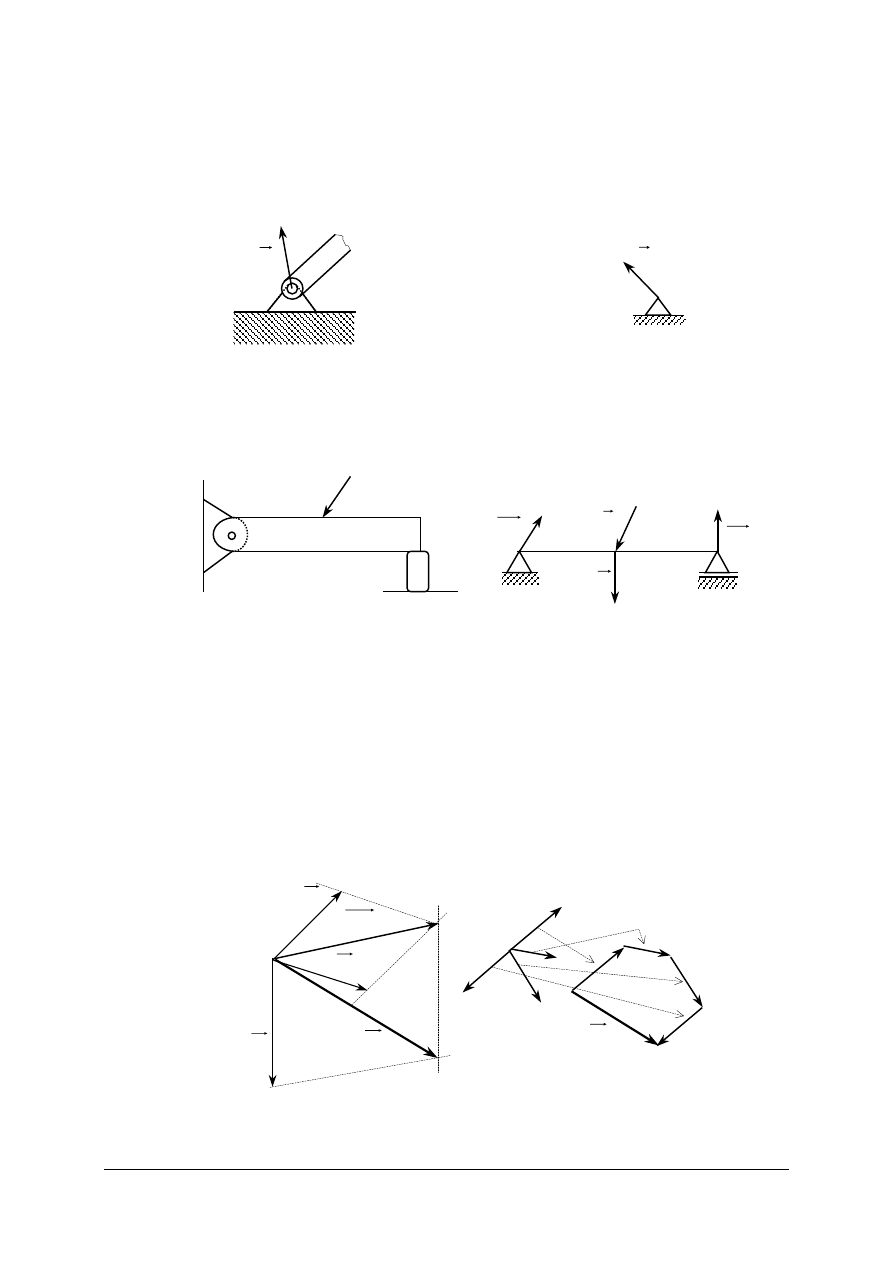
i biegnącej wgłąb (z). Więzy odbierające stopnie swobody wywołują reakcje. Podstawowe
rodzaje więzów i powstające w nich reakcje możemy podzielić na: podpory ruchome,
podpory stałe, więzy wiotkie. Przykłady podpór ruchomych, ich symbolicznego oznaczenia
oraz reakcje w nich powstające, przedstawiono na rysunku 6. Rysunek 6a przedstawia dwa
przykłady podpór ruchomych. Rysunek 6b przestawia podporę ruchomą z zaznaczoną
reakcją, która jest prostopadła do powierzchni napierającej.
a) Podpory ruchome i ich reakcje
b) Symboliczne oznaczenie
podpory ruchomej i jej
reakcji
Rys. 6. Podpory ruchome: a) oparcie na gładkim walcu i oparcie na pryzmie, b) symboliczne przedstawienie
podpory i występującej w niej reakcji
Przykład więza wiotkiego przedstawiono na rysunku 7. Reakcja ma początek w punkcie
zaczepienia i kierunek wzdłuż liny.
Rys. 7. Oznaczenie reakcji w więzie wiotkim
R
G
R
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Przykład podpory stałej przedstawiony jest na rysunku 8. Reakcja w tej podporze ma
punkt zaczepienia w punkcie przyłożenia, natomiast nieznany jest jej kierunek i zwrot.
Symboliczne oznaczenie podpory stałej
i jej reakcji. Kierunek i zwrot tej reakcji
narysowano umownie, gdyż nie są
znane.
Rys. 8. Podpora stała i reakcja w niej
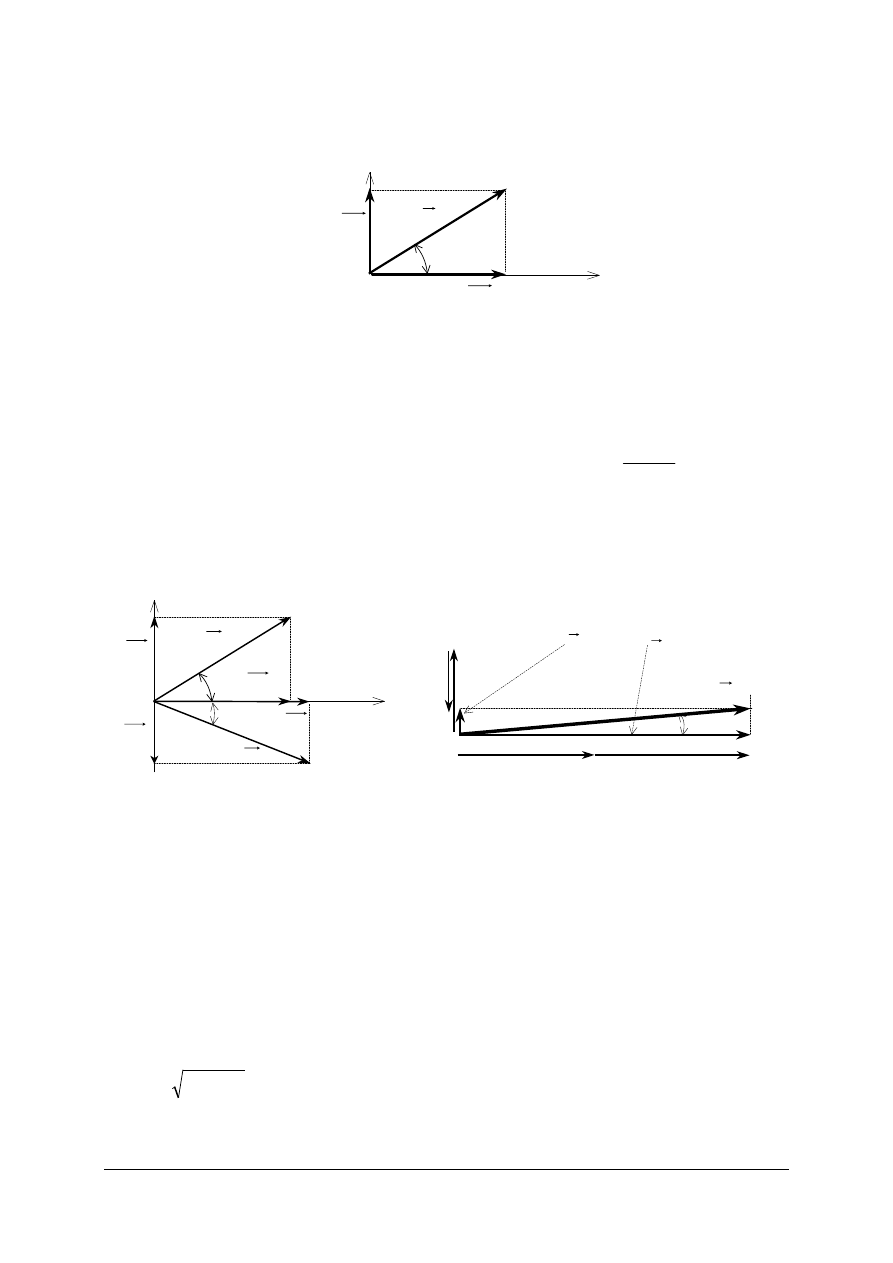
W statyce dokonujemy uproszczeń sprowadzając wszystko do modeli. Przykład takich
uproszczeń przedstawiony jest na rysunku 9. Znamy kierunek i zwrot reakcji R
B
, natomiast
nie znamy ani kierunku, ani zwrotu reakcji R
A
.
Rys. 9. Przykład układu statycznego i jego model
Składanie sił zbieżnych
Siłami zbieżnymi nazywamy siły, których linie działania zbiegają się w jednym punkcie.
Jeżeli mamy układ sił, w którym zbiegają się one w jednym punkcie, to taki układ możemy
uprościć poprzez zastąpienie wszystkich sił jedną, tak zwaną „siłą składową”.
Siły w zbieżnym układzie sił możemy dodawać dwoma metodami:
–
metodą wieloboku – rysunek 10b,
–
metodą równoległoboku – rysunek 10a.
W obydwu przypadkach postępujemy tak, jak przedstawionym na rysunku 10 dodawaniu
wektorów.
a)
składanie sił metodą równoległoboku
b)
składanie sił metodą wieloboku. Kolejność
składania sił jest dowolna
Rys. 10. Składanie sił zbieżnych: a) metodą równoległoboku, b) metodą wieloboku
R
A
R
F
G
B
R
R
1
F
2
F
3
F
2
,
1
S
F
S
F
S
F
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Rozkładanie sił na składowe
Każdą siłę możemy rozłożyć na dwie składowe, np. na dwie osie symetrii. Sposób
rozłożenia siły na dwie składowe, leżące na osiach symetrii x i y, przedstawiono na rysunku 11.
Rys. 11. Rozkładanie siły na dwie składowe
Wartość siły składowej (moduł) możemy określić metodą geometryczną lub analityczną.
W metodzie geometrycznej rysuje się siły w odpowiedniej podziałce, rozkładamy je na osie
symetrii, mierzymy długość siły składowej i mnożymy przez przyjętą podziałkę.
W metodzie analitycznej, mając podaną wartość siły i kąt α korzystamy ze wzorów:
F
x
= F · cos α
F
y
= F · sin α
F
2
= F
x
2
+ F
y
2
F
y
cos
α
=
F
Analityczne składanie sił zbieżnych
Mając układ sił zbieżnych możemy obliczyć wartość siły wypadkowej oraz kąt, pod
jakim biegnie kierunek tej składowej.
Rys. 12. Rysunek pomocniczy do obliczenia wartości siły składowej
Sposób postępowania jest następujący:
1. Rozkładamy siły F
1
i F
2
na składowe F
1x
, F
2x
, F
1y
, F
2y
2. Obliczamy sumy rzutów na oś x i oś y korzystając ze wzorów:
F
1x
= F
1
cos α
1
F
2x
= F
2
cos α
2
F
1y
= F
1
sin α
1
F
2y
= F
2
sin α
2
R
x
= F
1x
+ F
2x
R
y
= F
1y
+ F
2y
R
x
= F
1
cos α
1
+ F
2
cos α
2
R
y
= F
1
sin α
1
–
F
2
sin α
2
3. Wartość siły R obliczamy z wzoru:
R
2
= R
x
2
+ R
y
2
2
2
y
x
R
R
R
+
=
4. Kąt obliczamy ze wzoru:
cos α
= R
x
/ R
R
X
R
Y
R
αααα
1
F
x
1
F
y
1
F
1
αααα
y
2
F
2
αααα
2
F
x
2
F
αααα
x
R
y
R
R

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Warunki równowagi układu sił
Jeżeli punkt materialny, czy ciało sztywne są w stanie spoczynku, to wszystkie siły
zewnętrzne wzajemnie się znoszą (są w równowadze). Zapisać to można następująco:
F
1
+ F
2
+ ... F
n
= 0
Jest to warunek równowagi sił. Jeżeli wszystkie takie siły zredukowalibyśmy za pomocą
wieloboku sił, to wielobok byłby zamknięty. Zapisać to można następująco: Płaski zbieżny
układ sił jest w równowadze, jeżeli wielobok sił tego punktu jest zamknięty.
Rozkładając na osie wszystkie siły w zbieżnym płaskim układzie sił, warunek równowagi
odnosi się również do rzutów tych sił na osie.
F
1x
+ F
2x
+ ... F
nx
= 0
F
1y
+ F
2y
+ ... F
ny
= 0
Należy zaznaczyć, że warunek będzie spełniony, jeżeli uwzględnimy wszystkie siły
zewnętrzne – siły czynne i reakcje.
∑
=
0
M
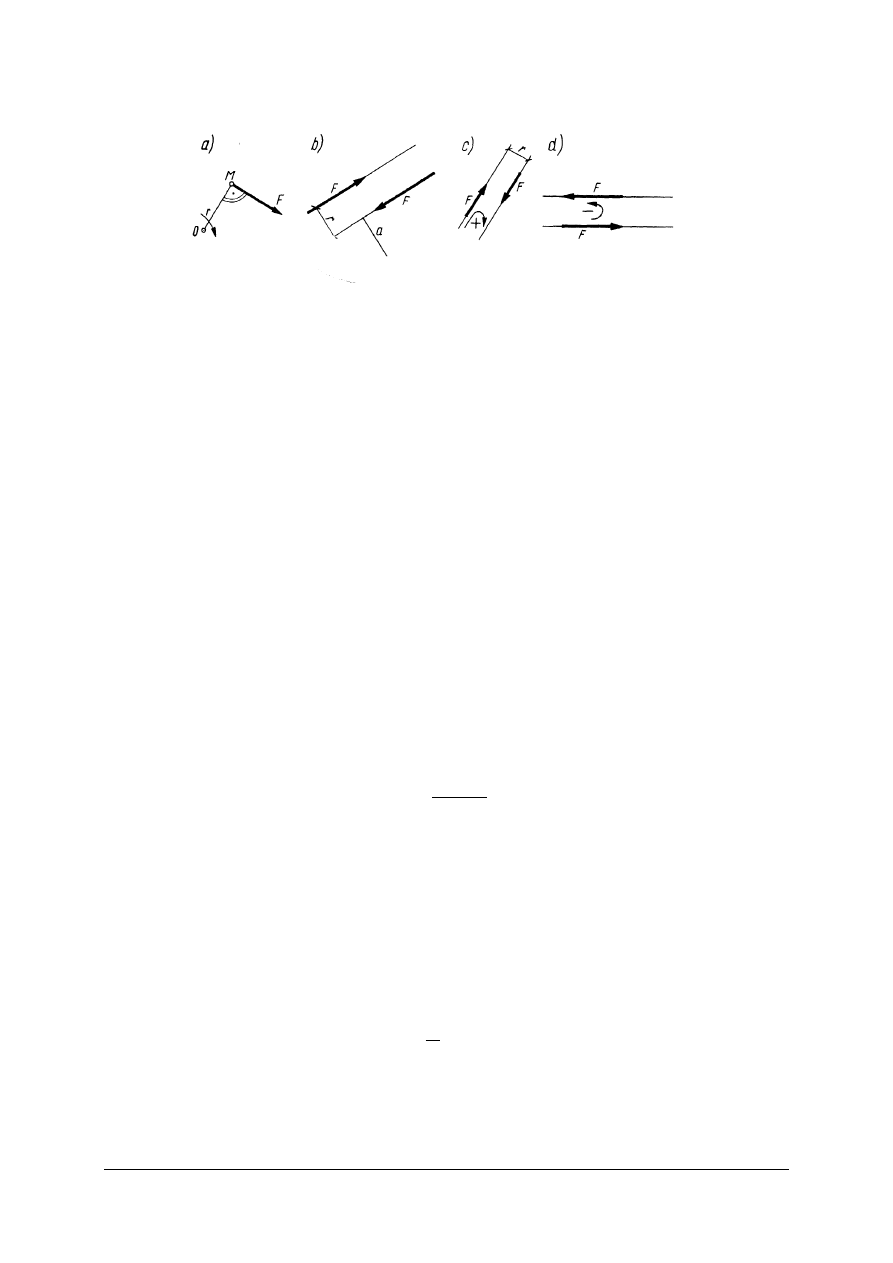
Moment siły
Momentem M siły F względem punktu O (bieguna) jest iloczyn tej siły przez jej ramię r
(rys. 13a):
r
F
M
⋅
=
Jednostką momentu siły jest N·m (niutonometr).
Moment pary sił
Parą sił jest układ dwóch sił, które mają równą wartość i jednakowe kierunki działania,
ale o zwrotach przeciwnych. Odległość prostych działania obu sił F oznacza się przez
r i nazywa ramieniem pary (rys. 13b). Obierając dowolny punkt O obliczyć można moment
pary sił względem tego punktu (bieguna). Moment ten składa się z dwóch momentów:
2
1
0
M
M
M
+
=
Odległość jednej siły od bieguna wynosi a, a drugiej a+r.
W ten sposób otrzymuje się:
a
F
M
1
⋅
−
=
(minus dlatego, że zwroty sił są przeciwne):
)
r
a
(
F
M
2
+
=
Dodając te momenty:
r
F
r
F
a
F
a
F
)
r
a
(
F
a
F
M
0
⋅
=
⋅
+
⋅
+
⋅
−
=
+
+
⋅
−
=
Z powyższego wynika, że moment pary sił jest niezależny od położenia bieguna, a suma
momentów sił tworzących tę parę jest stała i równa iloczynowi jednej z tych sił przez ramię
pary r. Iloczyn ten nosi nazwę momentu pary sił i oznaczany jest literą M:
r
F
M
⋅
=
W przypadku, gdy para sił dąży do obrócenia swego ramienia zgodnie z kierunkiem
ruchu wskazówek zegara, moment pary uważa się za dodatni (rys. 13c). Jeżeli zaś para sił
dąży do obrócenia swego ramienia w kierunku przeciwnym ruchowi zegara, moment pary
uważa się za ujemny (rys. 13d).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Rys. 13. Moment sił i moment pary sił [4, s. 12]
Moment obrotowy
Moment ten powstaje wówczas, gdy na ciało mogące się obracać działa siła zewnętrzna
w pewnej odległości od osi obrotu. Moment obrotowy M wyraża się iloczynem siły F
i ramienia r tej siły względem osi obrotu:
r
F
M
⋅
=
Wartość momentu zależy więc nie tylko od wartości siły, lecz również od długości
ramienia.
Ruch obrotowy
Gdy ciało sztywne dokonuje obrotu dookoła osi, wówczas wszystkie jego punkty
zakreślają łuki kołowe lub koła o promieniach równych odległościom tych punktów od osi
obrotu ciała. Gdy poszczególne punkty poruszają się po okręgach ruchem, jednostajnym,
v = constans, wówczas ruch ciała nazywamy ruchem obrotowym jednostajnym.
Drogi poszczególnych punktów ciała przebyte w jednakowych odstępach czasu zależą od
odległości tych punktów od osi obrotu, a są tym większe, im dalej są od niej położone.
W związku z tym i prędkości liniowe punktów leżących w rożnych odległościach od osi
nie mogą być równe. Punkty położone najdalej, tzn. leżące na obwodzie ciała, poruszać się
więc będą z największą prędkością, którą nazywamy prędkością obwodową lub liniową.
Prędkość obwodową ciała mierzoną w metrach na sekundę (m/s) można obliczyć jako
stosunek drogi przebytej przez punkt położony na obwodzie ciała do czasu ruchu i wyrazić
wzorem:
60
n
D
v
⋅
⋅
=
π
gdzie:
n – prędkością obrotową w obr/min,
D – średnicą ciała w m.
W ruchu obrotowym można rozpatrywać drogi przemywane przez poszczególne, punkty
ciała również jako kąty zakreślane przez te punkty. Będziemy wówczas mieli do czynienia nie
z prędkością obwodową, lecz z prędkością kątową
ω
(omega) – określaną jako stosunek
przyrostu kąta do odstępu czasu t, w którym ten przyrost nastąpił.
W ruchu obrotowym jednostajnym poszczególne punkty ciała zakreślają w następujących
po sobie jednostkach czasu jednakowe kąty:
const
t
=
α
=
ω
Jednostki, w których mierzymy prędkość kątową, wynikają z dzielenia jednostek kąta
przez jednostki czasu, np. rad/s, obr/min.
Pomiędzy prędkością kątową
ω
wyrażaną w rad/s a tą samą prędkością n wyrażaną
w obr/min zachodzi związek:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
30
n
60
n
2
⋅
π
=
⋅
π
=
ω
Pomiędzy prędkością liniową (obwodową) v wyrażoną w m/s, a prędkością kątową
ω
zachodzą związki:
v = r ·
ω
albo:
60
n
d
60
n
r
2
v
⋅
⋅
π
=
⋅
⋅
π
=
gdzie:
r – promień koła w m,
d – średnica koła w m.
Jeżeli droga kątowa nie jest proporcjonalna do czasu, to ruch obrotowy nie jest
jednostajny. Jeżeli prędkość kątowa ruchu obrotowego wzrasta, ruch nazywamy
przyspieszonym, jeżeli maleje – opóźnionym.
Przyśpieszenie kątowe
ε
(epsilon) ruchu obrotowego jednostajnie zmiennego jest
stosunkiem przyrostu prędkości kątowej ∆
ω
, do czasu t, w którym ten przyrost nastąpił:
t
t
o
t
ω
−
ω
=
ω
∆
=
ε
Jednostką przyśpieszenia kątowego jest 1 rad/s
2
.
Praca
Praca W jest wielkością fizyczną, którą mierzymy iloczynem działającej siły F i drogi
s przebytej w kierunku działaniu tej siły. Wyrażamy to wzorem:
s
F
W
⋅
=
Praca jest skalarem. Jest to wielkość (nie ma kierunku), którą określa się przez podanie
jej wartości liczbowej. Ponieważ
α
⋅
=
cos
F
F
, więc W = F · s · cos
α
.
Jednostką pracy w układzie SI jest dżul (J).
1 N · 1 m = 1 N · m = 1 J
Jest to wartość pracy, jaką wykona siła 1N ma drodze 1m, jeżeli kierunek działania tej
siły jest zgodny z kierunkiem przesunięcia.
Praca siły prostopadłej do drogi jest równa 0.
Moc
Moc P jest to stosunek pracy do czasu, w jakim została ona wykonana.
t
W
P
=
Jednostką mocy w układzie SI jest wat (W), czyli praca jednego dżula [J] wykonana
w czasie jednej sekundy.
1 W =
s
m
N
s
J
⋅
=
1
1
1
Krotnością tej jednostki jest kilowat: 1 KW = 10
3
W.
Moc P w ruchu obrotowym, gdy znane są moment obrotowy M [Nm] i prędkość kątowa
n [obr/min] oblicza się następująco:
−
prędkość obwodowa:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
30
n
r
60
n
r
2
v
⋅
⋅
π
=
⋅
⋅
π
=
−
moc:
30
n
r
F
P
⋅
⋅
π
⋅
=
W tym wzorze iloczyn
M
r
F
=
⋅
, w związku, z czym wzór przyjmuje postać:
]
kW
[
1000
30
n
M
]
W
[
30
n
M
P
⋅
⋅
⋅
π
=
⋅
⋅
π
=
W przypadku, gdy znane są prędkość kątowa n [obr/min] i moc P [kW] moment w ruchu
obrotowym M wynosi:
]
m
N
[
n
P
1
,
9554
M
⋅
⋅
=
Z analizy powyższego wzoru wynika m. in., że podczas dużych obrotów uzyskuje się
niewielki moment obrotowy, a tym samym niewielkie siły obwodowe i odwrotnie.
Energia
Jeżeli jakieś ciało ma zdolność do wykonania pewnej pracy, to mówi się, że ciało ma
energię. Energię mierzymy ilością pracy, która może być wykonana przez dane ciało.
Jednostki energii są więc takie same jak jednostki pracy. Rozróżniamy energię mechaniczną
potencjalną i kinetyczną.
Energię potencjalną
(położenia) ma ciało podniesione na pewną wysokość. Przy
podnoszeniu ciała o masie m na wysokość h wykonywana jest praca równa, iloczynowi
ciężaru G (G = m · g) ciała i wysokości podnoszenia h. Wynika stąd, wartość energii
potencjalnej ciała wyrażonej w [ J].
E
p
= G · h = m · g · h
gdzie:
g – przyśpieszenie ziemskie.
A zatem energia potencjalna jest to zdolność do wykonania pracy przez ciało znajdujące
się w spoczynku.
Energia kinetyczna (ciała będącego w ruchu) przedstawia zdolność wykonania pracy
przez ciało o masie m [kg] poruszające się z prędkością v [m/s] wyraża się jako połowa
iloczynu masy i kwadratu prędkości (prędkość czynnik dominujący):
2
v
m
E
2
k
⋅
=
lub
g
2
v
G
E
2
k
⋅
⋅
=
Suma energii kinetycznej i potencjalnej zawartej w danym ciele nosi nazwę energii
mechanicznej E tego ciała:
const
E
E
E
p
k
=
+
=
Sprawność jest to stosunek otrzymanej energii użytecznej E
u
do całkowitej energii
włożonej E
w
:
w
u
E
E
=
η
Ponieważ E
u
< E
w
zawsze, więc η jest mniejsze od jedności.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Maszynę o sprawności
1
=
η
nazywa się idealną, – oczywiście z uwagi na powyżej
omówione straty w rzeczywistości taka maszyna nie istnieje. Najczęściej maszyna składa się
z wielu zespołów (mechanizmów), wobec tego sprawność ogólna maszyny jest iloczynem
sprawności poszczególnych jej mechanizmów.
n
2
1
.....η
η
η
η
⋅
⋅
=
Wiemy już, że wartość energii mierzy się ilością pracy, jaką może ona wykonać stąd
wynika wniosek, że stosunek pracy użytecznej W
u
do pracy włożonej W
w
nazywa się także
sprawnością.
W
u
W
W
=
η
lub w procentach
%
100
W
W
w
u
⋅
=
η
Jeżeli pracę
w
W podzielimy przez czas t, w którym została ona wykonana, to otrzymamy
moc włożoną
w
P równą sumie mocy użytecznej
u
P oraz mocy utraconej
s
P . Sprawność jest
stosunkiem mocy użytecznej do włożonej:
w
u
P
P
=
η
lub
%
100
P
P
w
u
⋅
=
η
Z definicji sprawności wynika, że moc użyteczna maszyny jest równa:
η
⋅
=
w
u
P
P
a moc włożona:
η
=
u
w
P
P
Odkształcenia ciał
Odkształceniem nazywamy proces zmiany kształtu i wymiarów ciała poddanego
działaniu obciążenia. Rozróżnia się odkształcenia sprężyste i plastyczne. Odkształcenie
sprężyste to takie, które znika całkowicie (dla ciał doskonale sprężystych) lub tylko
częściowo (dla ciał częściowo sprężystych). W przypadku odkształcenia plastycznego ciało
nie powraca do swego poprzedniego kształtu nawet po ustaniu działania obciążenia.
W praktyce elementy konstrukcyjne powinny być obciążone w taki sposób, by ulegały
odkształceniu częściowo sprężystym (elementy te powinny wykazywać odkształcenie prawie
doskonale sprężyste).
Podział odkształceń ze względu na sposób działania obciążenia na ciało
W nauce mechaniki przyjmuje się, że wszystkie ciała są doskonale sztywne. W praktyce
jednak zarówno części maszyn, jak i budowle, dla których dokonuje się obliczeń
wytrzymałościowych, nie są ciałami doskonale sztywnymi, lecz ciałami sprężysto-
plastycznymi, gdyż mają następujące własności:
−−−−
odkształcalność, czyli zdolnością ciała do zmiany kształtu lub wymiarów pod wpływem
obciążeń zewnętrznych lub doprowadzonego ciepła,
−−−−
sprężystość, czyli właściwość odzyskiwania pierwotnego kształtu po usunięciu
obciążenie ( usunięcie działania sił zewnętrznych), które spowodowały odkształcenie,
−−−−
plastyczność, czyli zdolność do trwałych odkształceń, tzn. takich, które nie znikają po
usunięciu obciążeń (sił zewnętrznych) wywołujących te odkształcenia. W tym przypadku
siły muszą jednak przekroczyć pewną wartość,
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
−−−−
wytrzymałość, czyli największa wartość obciążenia, (granica oporu stawianego przez
materiał) po której przekroczeniu następuje zniszczenie ciała ( a więc zmiana kształtu,
rozerwanie, złamanie, ścięcie, itp. części konstrukcyjnej).
Ponadto przyjmuje się, że materiały stosowane na części konstrukcyjne mają właściwości
mechaniczne jednakowe, niezależne od kierunku działania obciążeń i jednakową gęstość.
Materiały nie mające takich właściwości to np.: drewno (różne właściwości wzdłuż
i w poprzek włókien) a także blacha stalowa walcowana na zimno (pomimo tych
niedogodności są często stosowane na części konstrukcyjne z uwagi na ich inne zalety).
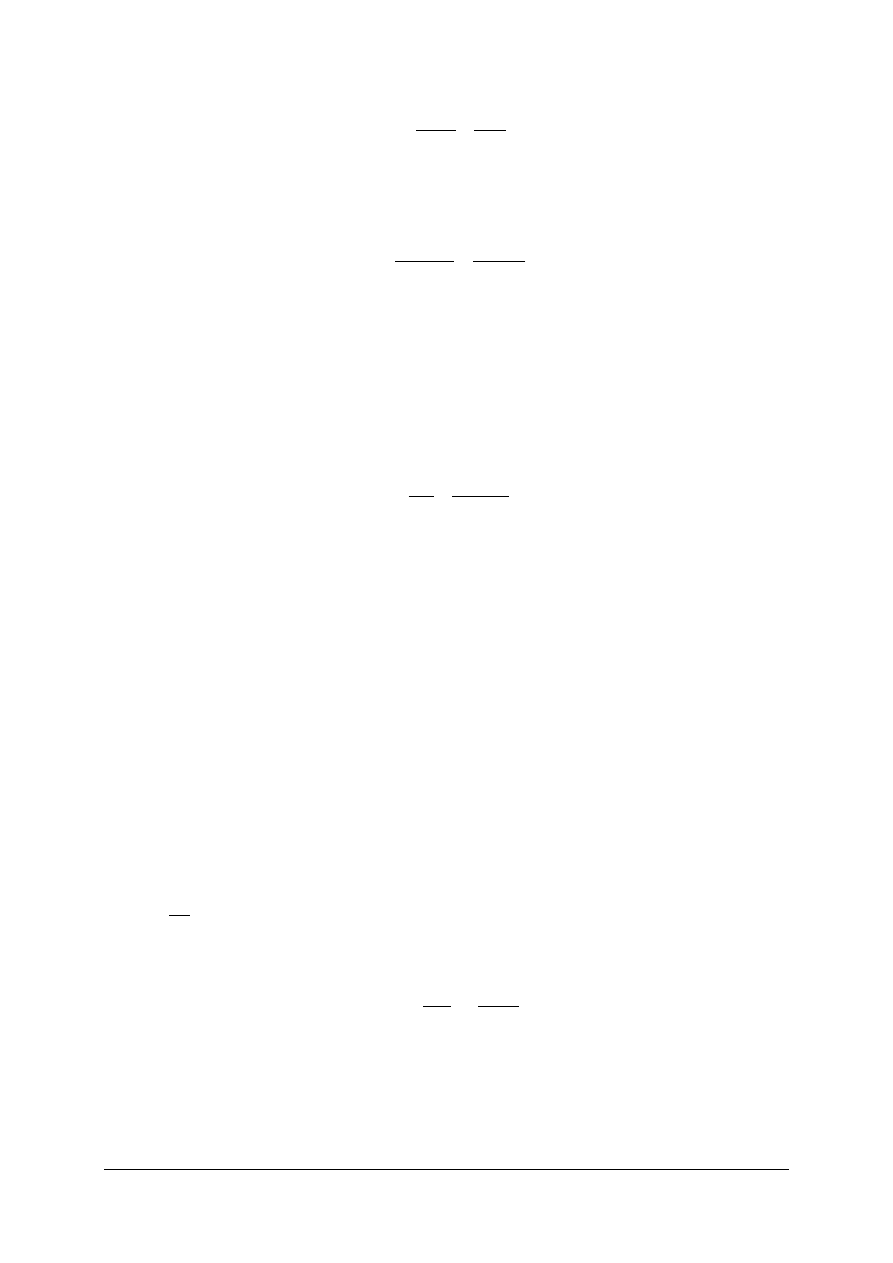
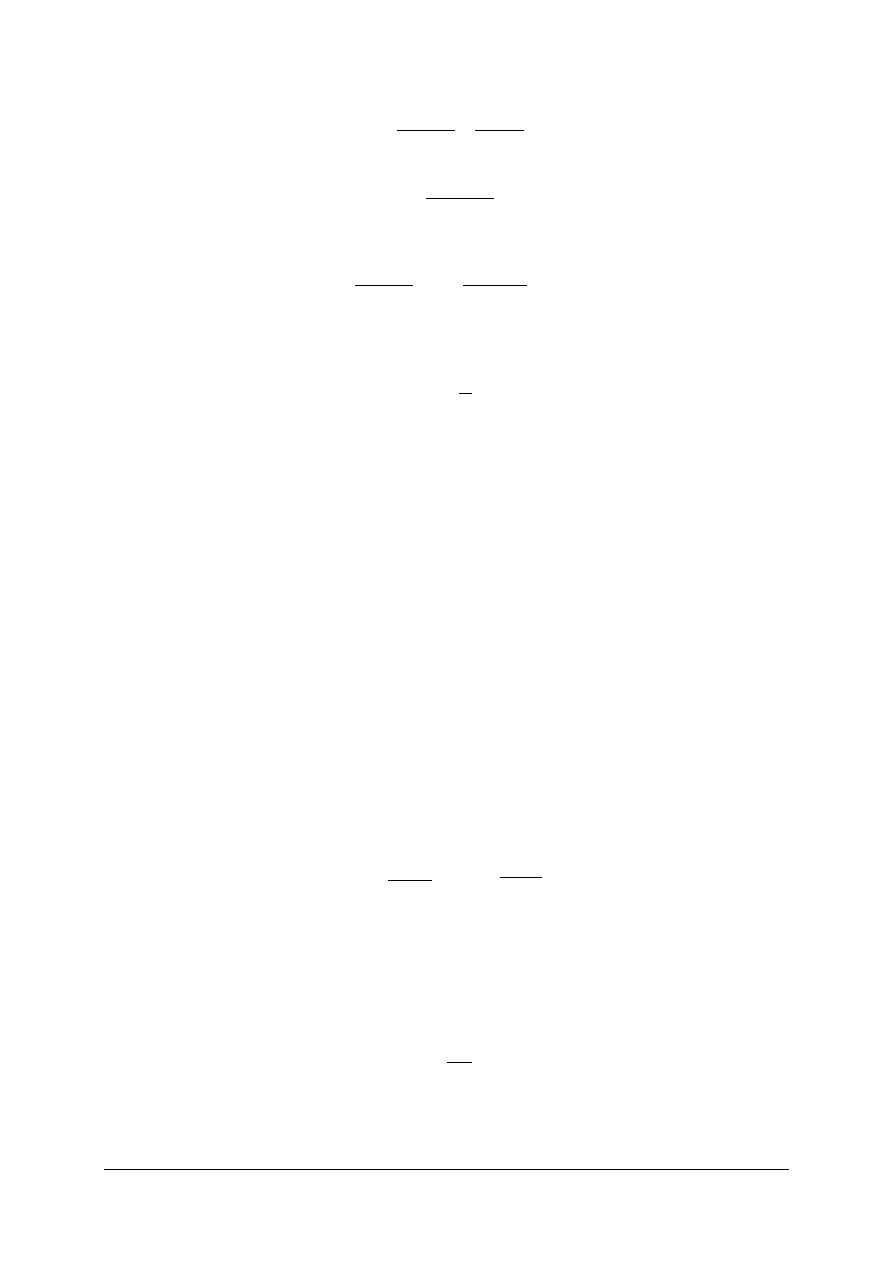
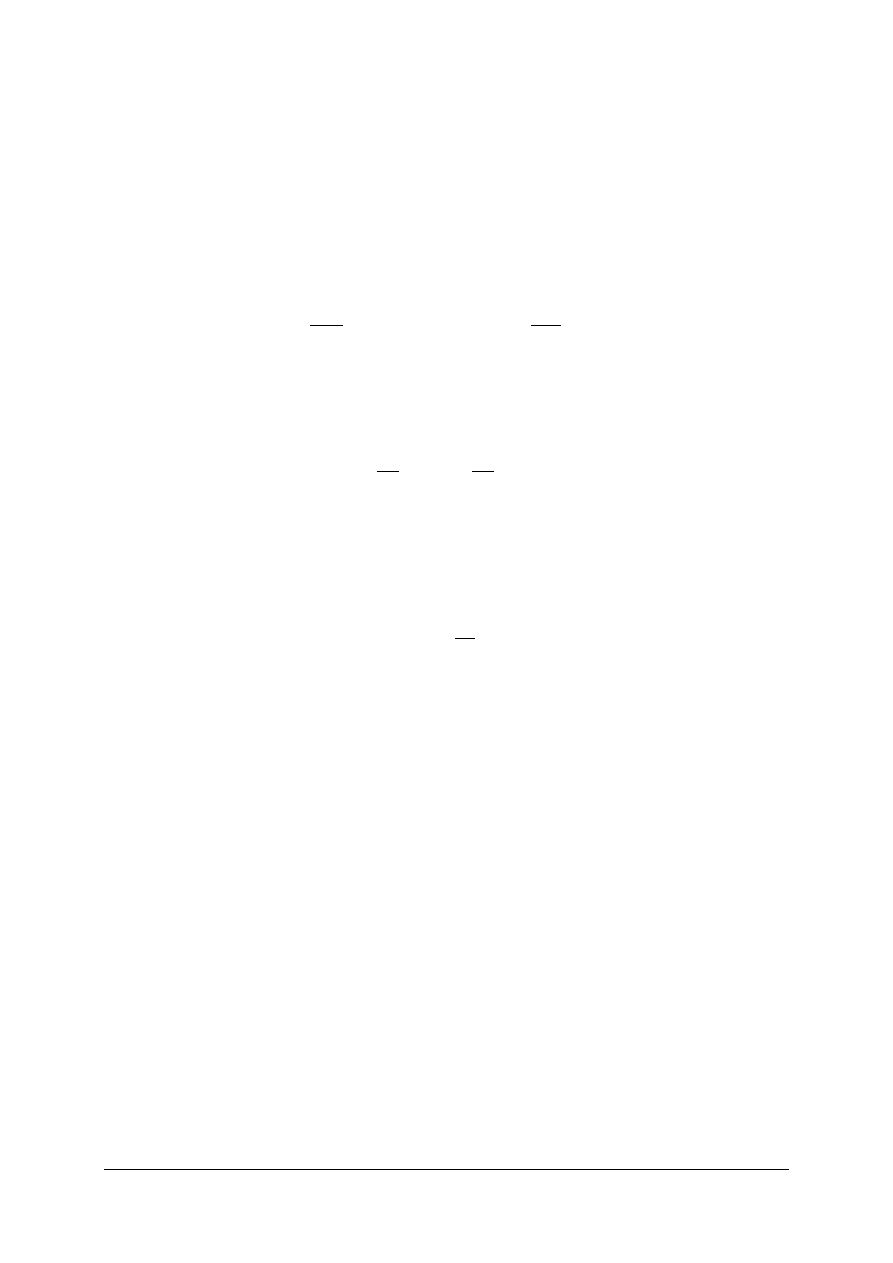
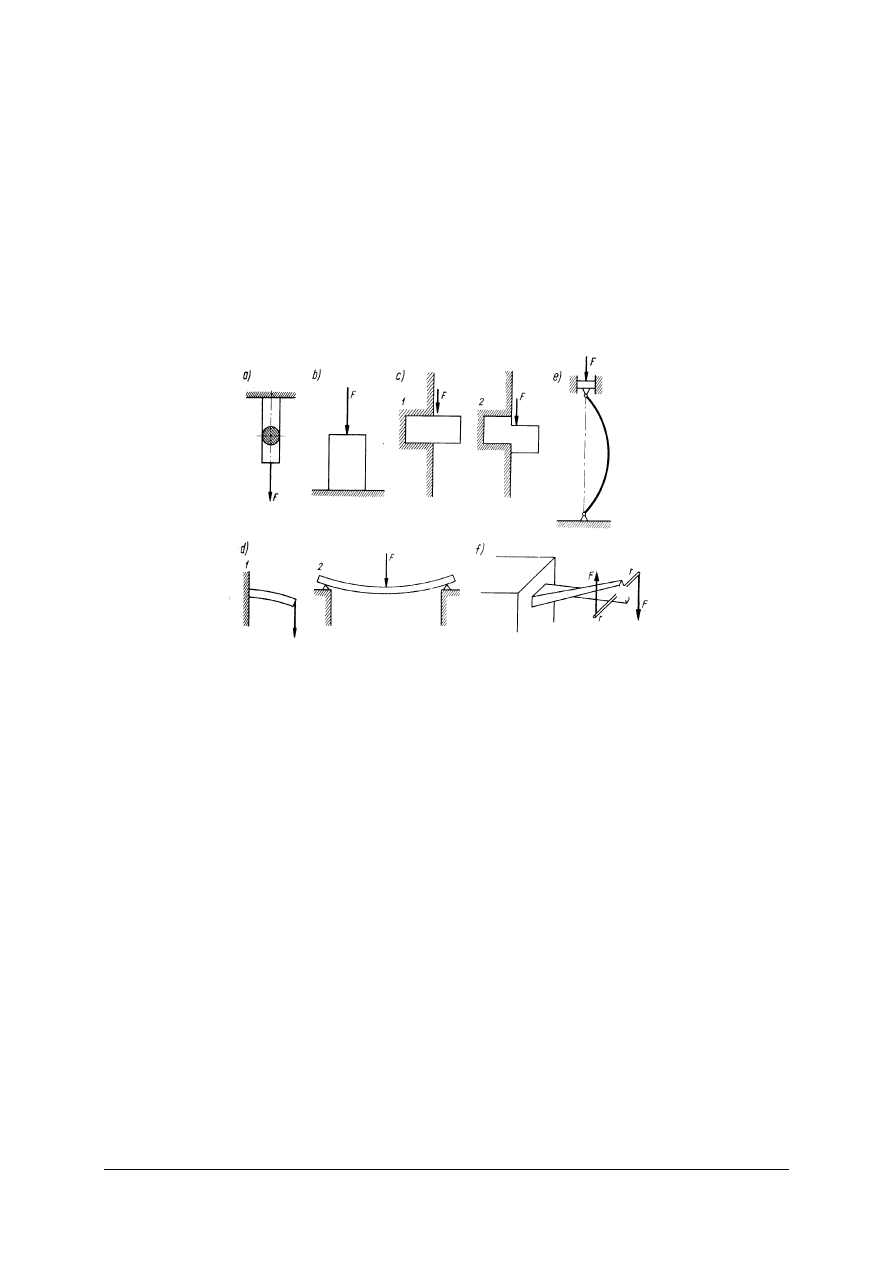
Podstawowe rodzaje obciążeń powodują: rozciąganie, ściskanie, zginanie, ścinanie
i skręcanie ciał. Zależnie od sposobu działania sił zewnętrznych na dany przedmiot może się
on wydłużać, spęczać, skręcać i wyginać.
Rys. 14.
Rodzaje obciążeń: a) rozciąganie, b) ściskanie, c) ścinanie, d) zginanie, e) wyboczenie, f) skręcanie [5, s. 21]
Rozciąganie: Ze zjawiskiem rozciągania spotykamy się, kiedy dana siła F (rys. 14a) stara
się wydłużać ciała w kierunku jej działania. W praktyce na rozciąganie narażone są łańcuchy,
liny, pasy, zawiesia, haki, itp.
Ściskanie: Ze zjawiskiem spotykamy się wówczas, gdy siła F (rys. 14b) ciśnie na ciało,
usiłując je zgnieść. Na ściskanie narażone są np. fundamenty domów, fundamenty, na których
ustawione są młoty, prasy, łożyska, korpusy maszyn, itp.
Ścinanie: Występuje, gdy siła F (rys. 14c) działa prostopadle do danego przedmiotu.
W konstrukcjach maszynowych na ścinanie narażone są nity, kołki, sworznie, kliny, wpusty,
itp.
Zginanie: Ze zjawiskiem zginania spotykamy się, gdy siła F (rys. 14d) działa w kierunku
prostopadłym do długości elementu, usiłując go wygiąć. Na zginanie narażone są wszelkiego
rodzaju belki, wały, itp.
Wyboczenie: Występuje, gdy pręt smukły, tzn. o znacznej długości w stosunku do
wymiarów jego przekroju poprzecznego, poddany jest ściskaniu wzdłużnemu (rys. 14e). Pod
wpływem więc siły F może nastąpić wyboczenie np. słupa, podpory, itp.
Skręcanie: Ze zjawiskiem spotykamy się wówczas, gdy para sił F (rys. 14f) leżąca
w płaszczyźnie prostopadłej do osi podłużnej elementu, działając na ramiona r, usiłuje go
skręcić, tak że włókna, które przedtem były do osi równoległe, stają się śrubowo skręcone.
Wytrzymałość złożona: Ze zjawiskiem spotykamy się, gdy w różnych konstrukcjach
występują jednocześnie dwa, a nawet więcej rodzajów obciążeń.
Najczęściej spotyka się zginanie połączone z rozciąganiem lub ściskaniem oraz zginanie
ze skręcaniem.(np. wały).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
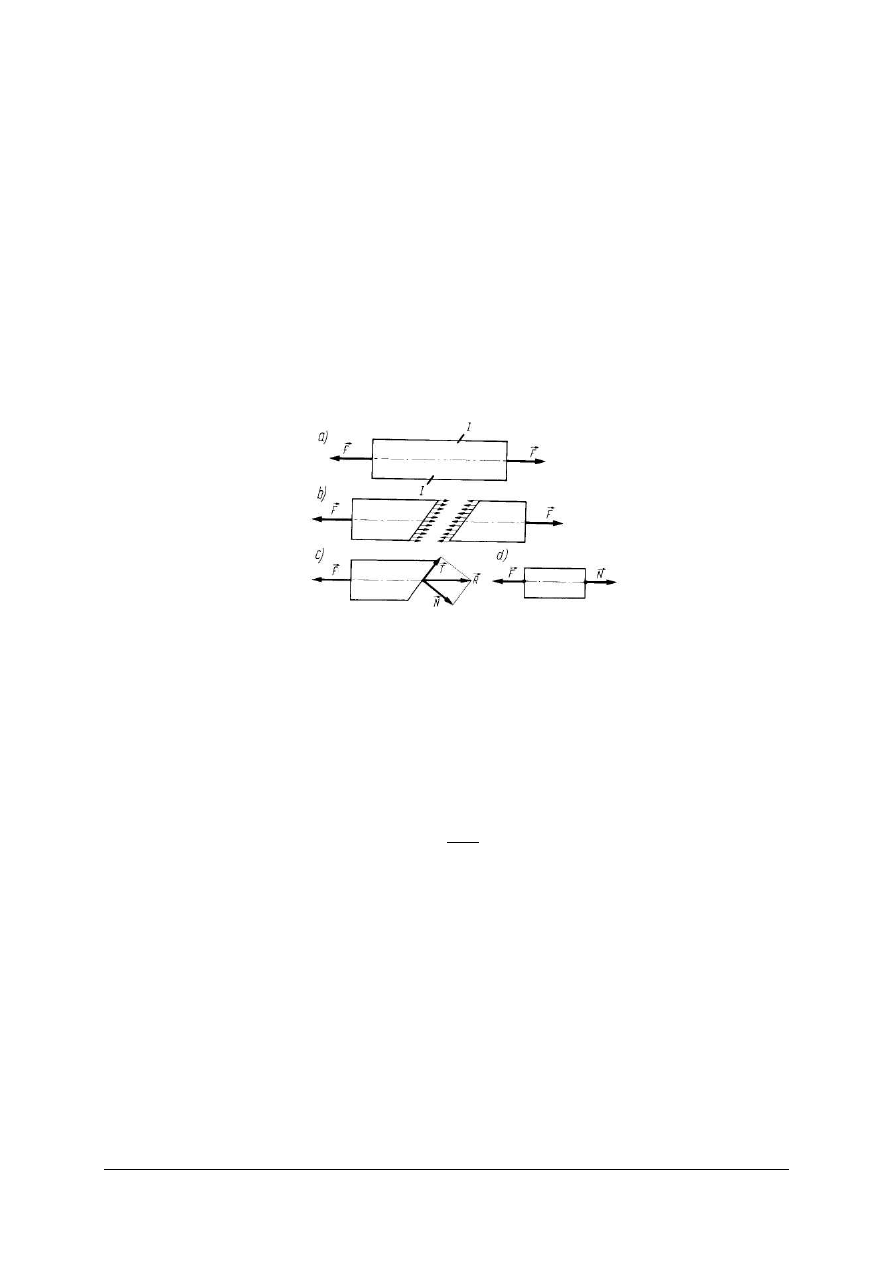
Naprężenia normalne i styczne
Naprężeniem nazywamy działanie w materiale sił wewnętrznych, wywołanych
obciążeniem zewnętrznym (siły te działają w rozpatrywanym przekroju elementu
odkształcanego). Można je zastąpić wypadkową siłą wewnętrzną R. Siła ta rozkłada się na
dwie składowe: prostopadłą do rozpatrywanego przekroju (wektor N) oraz styczną do niego
(wektor T).
Naprężeniem normalnym nazywamy stosunek składowej N do pola przekroju
prostopadłego do wektora N:
δ = N/S
Naprężeniem stycznym nazywamy stosunek składowej S do pola przekroju
prostopadłego do tej składowej:
τ = T/S
Położenie wektorów: R, N i T przedstawione jest na rysunku 15.
Rys. 15. Rozkład wektorów naprężenia normalnego i stycznego w kolejnych etapach rozciągania pręta przez
parę sił F: F– siły rozciągające, R– wektor wypadkowy sił wewnętrznych T, N– składowe wektora R
[15, s. 150]
Jednostką podstawową naprężenia w układzie SI jest 1 pascal (Pa);1 Pa=1N/m
2
.
Prawo Hooke’a
W przedziale obciążeń, wywołujących odkształcenia sprężyste elementu rozciąganego
jego wydłużenie ∆l jest wprost proporcjonalne do wartości siły rozciągającej i do długości
początkowej elementu oraz odwrotnie proporcjonalne do pola przekroju poprzecznego:
S
E
l
F
∆l
⋅
⋅
=
gdzie:
F
–
siła rozciągająca,
l
–
długość początkowa elementu rozciągającego,
E
–
moduł sprężystości wzdłużnej,
S
–
pole przekroju poprzecznego.
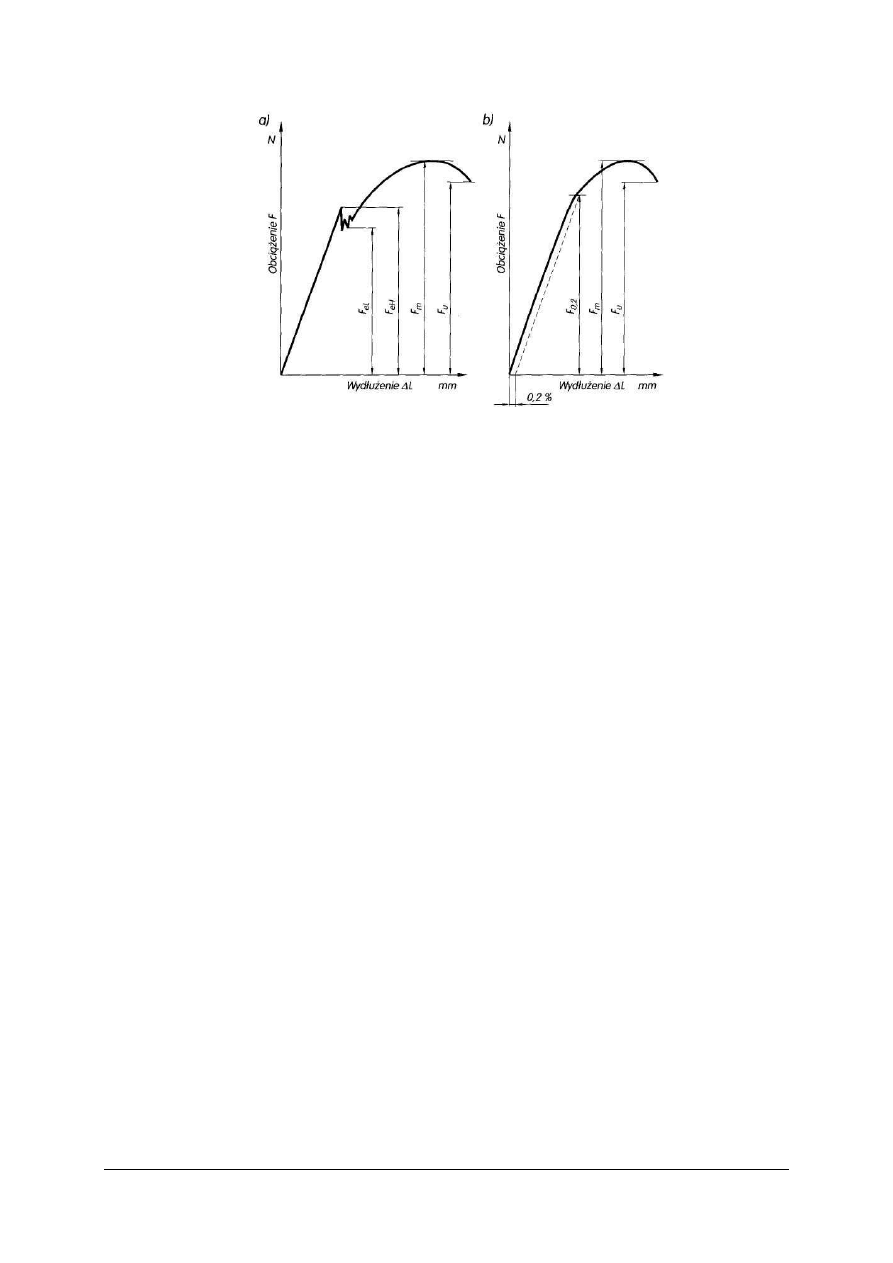
Statyczna próba rozciągania materiałów
Próba ta polega na rozciąganiu badanego materiału rosnącymi siłami i rejestrowaniu
wydłużeń całkowitych próbki pojawiających się w czasie próby. Zależność wydłużenia od
działającej siły przedstawia rysunek 16.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
Rys. 16. Wykresy rozciągania: a) dla metali o wyraźnej granicy plastyczności, b) dla materiałów kruchych
z umowną granicą plastyczności [17, s. 25]
Naprężenie dopuszczalne
Elementy maszynowe i konstrukcyjne w czasie eksploatacji przenoszą różne obciążenia,
co wiąże się z naprężeniami powstającymi w tych elementach. Są to naprężenia rzeczywiste.
Aby dana część nie uległa w czasie użytkowania zniszczeniu naprężenia rzeczywiste nie
mogą przekroczyć pewnej wartości, określonej dla danego rodzaju materiału, z którego
wykonany jest element. Wartość taka nazywana jest naprężeniem dopuszczalnym.
Naprężenie dopuszczalne oznaczamy literą k z indeksem informującym o charakterze
odkształcenia wywołującego dane naprężenie rzeczywiste. W praktyce mamy do czynienia
z następującymi naprężeniami dopuszczalnymi:
−
k
r
– naprężenie dopuszczalne przy rozciąganiu,
−
k
c
– naprężenie dopuszczalne przy ściskaniu,
−
k
g
– naprężenie dopuszczalne przy zginaniu,
−
k
t
– naprężenie dopuszczalne przy ścinaniu,
Współczynnik bezpieczeństwa
Jest to wielkość bezwymiarowa, określająca ile razy naprężenie dopuszczalne dla danego
materiału jest mniejsze od granicy wytrzymałości (dla materiałów kruchych) lub od granicy
plastyczności (dla materiałów plastycznych).
Rodzaje obciążeń. W trakcie eksploatacji maszyny jej części mogą ulec uszkodzeniu lub
zniszczeniu pod wpływem czynników zewnętrznych, np. w wyniku działania sił
zewnętrznych, nadmiernego nagrzania, korozji. Zadaniem konstruktora jest takie
zaprojektowanie części, aby zapewnić zmniejszenie do minimum prawdopodobieństwa
zniszczenia tych części. Podstawą do obliczeń wytrzymałościowych części maszyn jest
określenie charakteru sił zewnętrznych, czyli obciążeń mechanicznych.
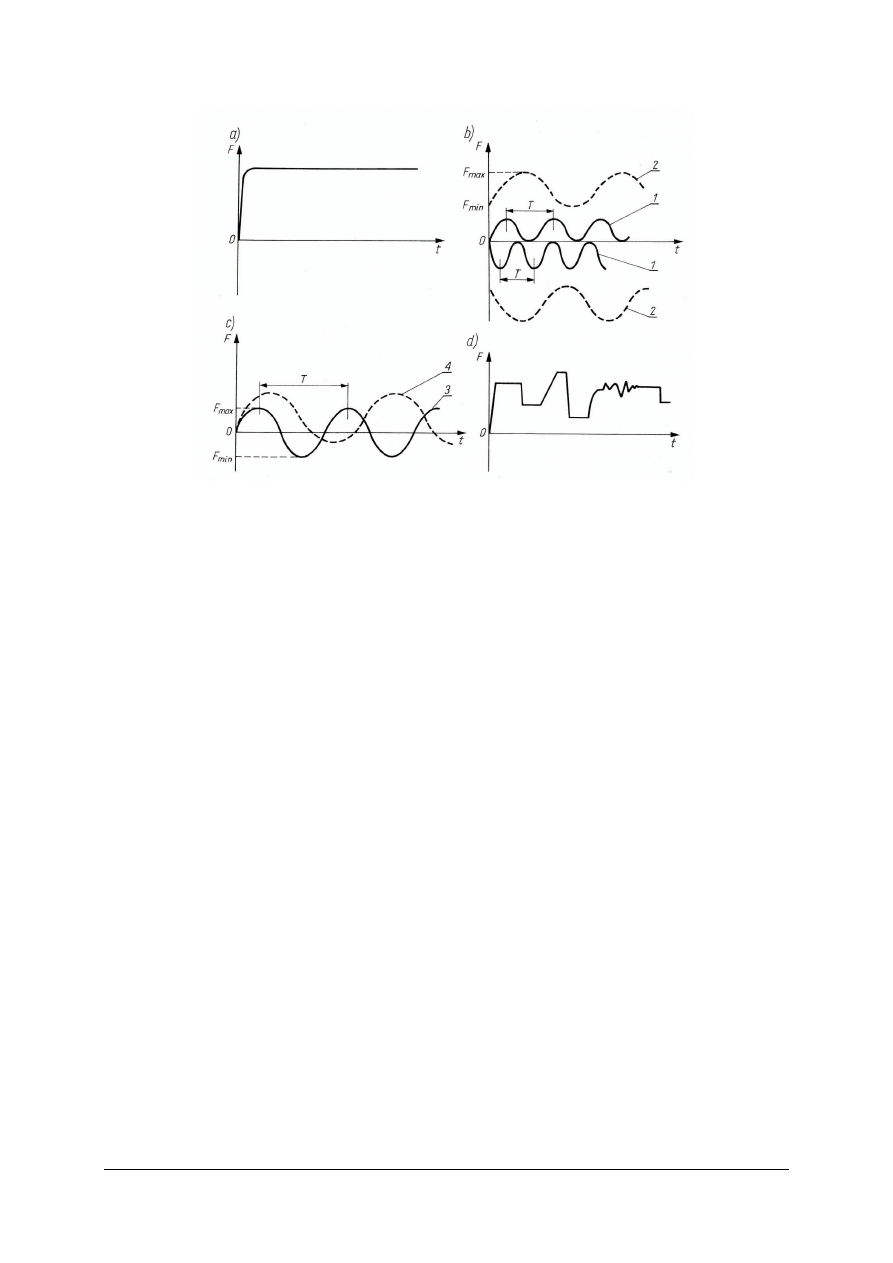
Obciążenia dzieli się ogólnie na:
−
stałe (statyczne, niezmienne, trwałe), których wartość i kierunek są niezmienne w ciągu
dość długiego czasu pracy (rys. 17a)
−
zmienne, o różnym charakterze zmienności w czasie pracy (rys. 17b, c i d).
Do zbliżonych obciążeń zmiennych można ewentualnie przyrównać obciążenia
nieustalone (rys. 217d).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Rys. 17. Rodzaje cykli obciążeń i naprężeń: a) stały, b) jednostronnie zmienny (1 – tętniący odzerowo,
2 – tętniący jednostronny), c) obustronnie zmienny (3 – wahadłowy symetryczny, 4 – dwustronny
niesymetryczny), d) nieustalony, T – okres (cykl zmiany obciążeń i naprężeń) [14, s. 15]
4.1.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jakie wyróżniamy modele ciał rzeczywistych?
2. Jak dodajemy wielkości skalarne?
3. Jak dodajemy wielkości wektorowe?
4. Jak dzielimy siły wewnętrzne i zewnętrzne?
5. W jakich jednostkach mierzymy siłę?
6. Co to są więzy?
7. Ile stopni swobody może posiadać ciało swobodne?
8. Jakie są rodzaje więzów?
9. Jaki układ sił nazywamy zbieżnym?
10. Jakimi metodami możemy składać siły?
11. Co to jest naprężenie styczne i normalne?
12. Jak brzmi prawo Hooke’a?
13. Jakie rodzaje odkształceń można wyróżnić na wykresie przedstawiającym statyczną
próbę rozciągania metali?
14. Co to jest naprężenie rzeczywiste i dopuszczalne?
15. Co to jest moment gnący?
16. Jakie są rodzaje obciążeń i naprężeń?
4.1.3. Ćwiczenia
Ćwiczenie 1
Przekładnia łańcuchowa jest zbudowana z dwóch kół łańcuchowych opasanych
łańcuchem. Większe koło przekładni łańcuchowej wykonuje 60 obr/min, średnica tego koła
d = 0,2 m. Oblicz prędkość obwodową łańcucha (liniową).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się, w jaki sposób oblicza się prędkość liniową,
3) odszukać w materiałach dydaktycznych wzór na prędkość obwodową (liniową),
4) zastosować wyszukany wzór,
5) zapisać wynik,
6) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
−−−−
kartka papieru, długopis,
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
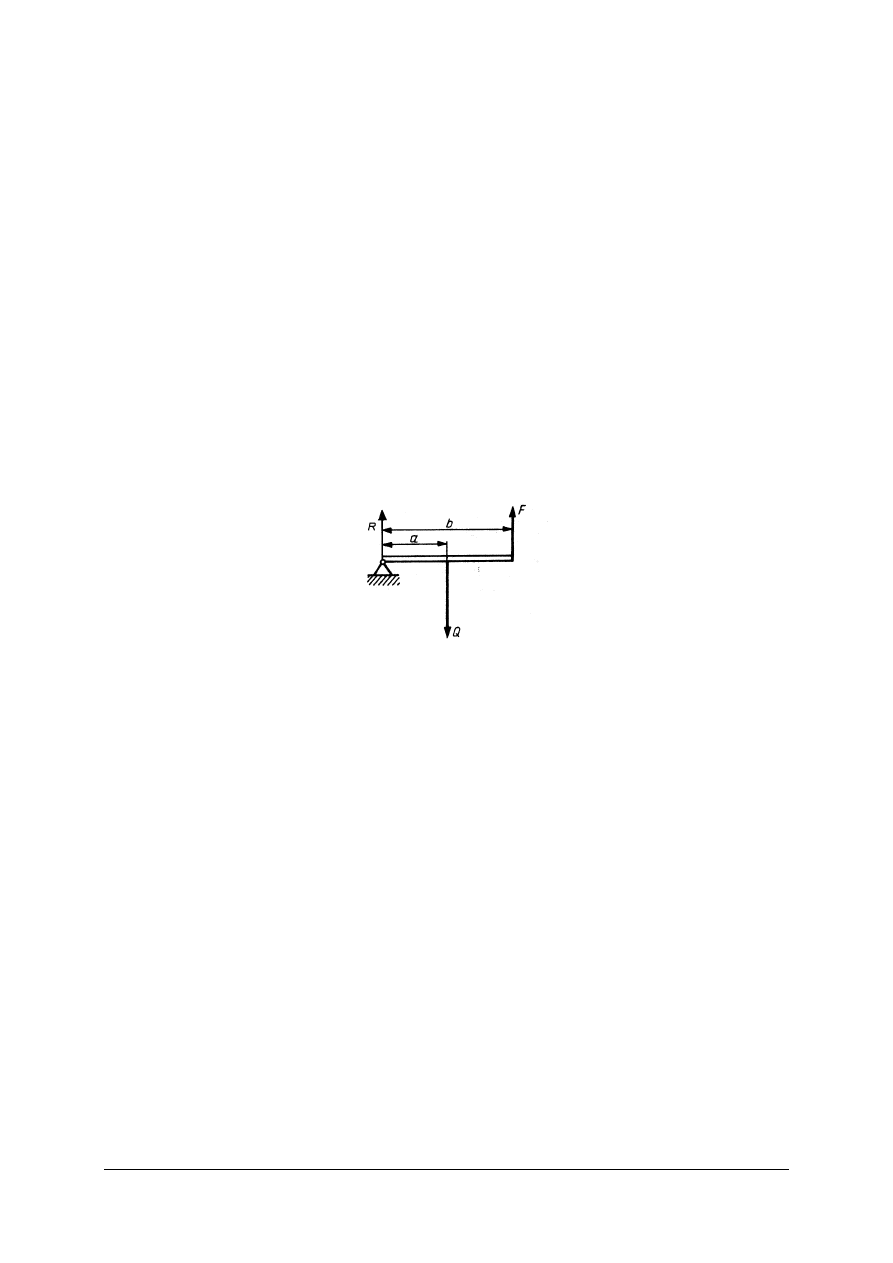
Ćwiczenie 2
Na rysunku przedstawiono maszynę prostą – dźwignię, służącą do pokonania siły oporu
użytecznego Q siłą mniejszą F skierowaną w żądanym kierunku. Dźwignia jednoramienna
jest obciążona siłą ciężkości Q = 20N. Oblicz silę F i R niezbędną do spełnienia warunków
równowagi sił i momentów, znając długość ramion: a = 1 m, b = 2 m.
Rysunek do ćwiczenia 2 [5, s. 70]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się, jakie warunki muszą zostać spełnione, aby dźwignia pozostała
w równowadze,
3) odszukać w materiałach dydaktycznych wzory wyznaczające stany równowagi ciał.
4) obliczyć wartość siły F spełniającą warunek równowagi momentów,
5) obliczyć wartość siły R spełniającą warunek równowagi sił,
6) zapisać wyniki,
7) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
−−−−
kartka papieru, długopis,
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
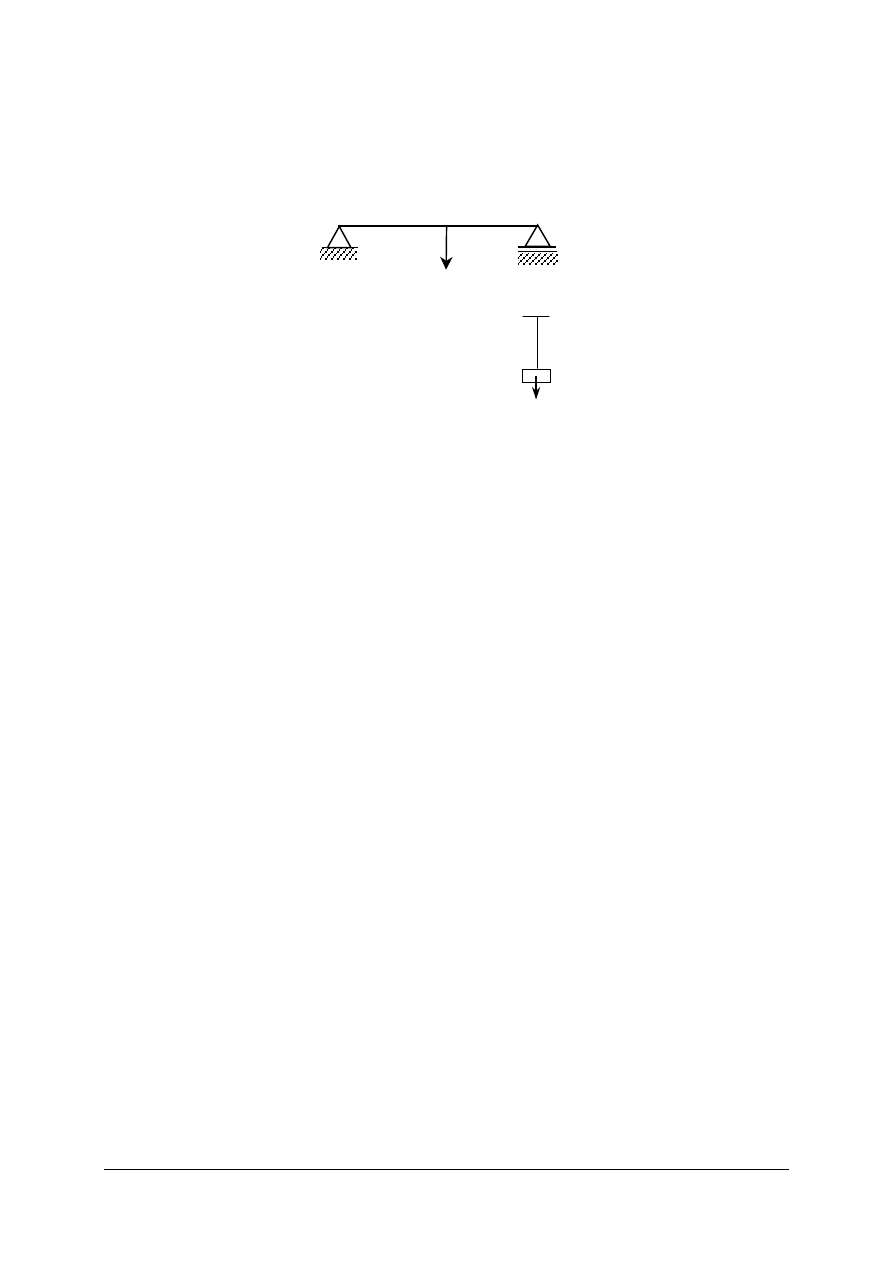
Ćwiczenie 3
Zaznacz reakcje w więzach dla przedstawionych poniżej przypadków.
Układ obciążony siłą zewnętrzną
Ciężar zwisający na linie
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przypomnieć sobie sposób wyznaczania reakcji w więzach,
2) wrysować reakcje w podporach oraz w więzie wiotkim.
Wyposażenie stanowiska pracy:
−−−−
linijka z podziałką i trójkąt,
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 4
Przeprowadź statyczną próbę wytrzymałości na rozciąganie materiału sprężysto–
plastycznego.
Sposób wykonania ćwiczenia:
Aby wykonać ćwiczenie powinieneś:
1) zapoznać się z instrukcją obsługi uniwersalnej maszyny wytrzymałościowej,
2) dobrać próbkę wytrzymałościową do zamocowanych w maszynie szczęk chwytowych,
3) zmierzyć dobraną próbkę,
4) zamontować próbkę w uchwycie maszyny,
5) dobrać właściwą skalę obciążenia maszyny,
6) włączyć obciążenie maszyny,
7) wyłączyć maszynę po zerwaniu próbki,
8) wyjąć próbkę z uchwytów maszyny i dokonać potrzebnych pomiarów,
9) obejrzeć dokładnie przełom próbki,
10) wyjąć narysowany przez maszynę wykres,
11) wykonać sprawozdanie z przeprowadzonej próby.
Wyposażenie stanowiska pracy:
−
uniwersalna maszyna wytrzymałościowa wraz z instrukcją obsługi,
−
próbka wytrzymałościowa do badań,
−
instrukcja do obsługi maszyny,
−
lupa do obserwacji makroskopowych przełomu próbki,
−
literatura zgodna z punktem 6 Poradnika dla ucznia.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Ćwiczenie 5
W składzie materiałów budowlanych wózek suwnicy jedzie po szynach na wysokości
5 m nad ziemią i porusza się z prędkością v = 1 m/s. Oblicz energię mechaniczną jadącego
wózka. Ciężar wózka m = 1000 N.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się, w jaki sposób oblicza się energię mechaniczną,
3) odszukać w materiałach dydaktycznych wzory na energię potencjalną, kinetyczną
i mechaniczną,
4) obliczyć energię potencjalną wózka,
5) obliczyć energię kinetyczną wózka,
6) obliczyć energię mechaniczną wózka,
7) zapisać wyniki,
8) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
−
kartka papieru, długopis,
−
literatura zgodna z punktem 6 Poradnika dla ucznia.
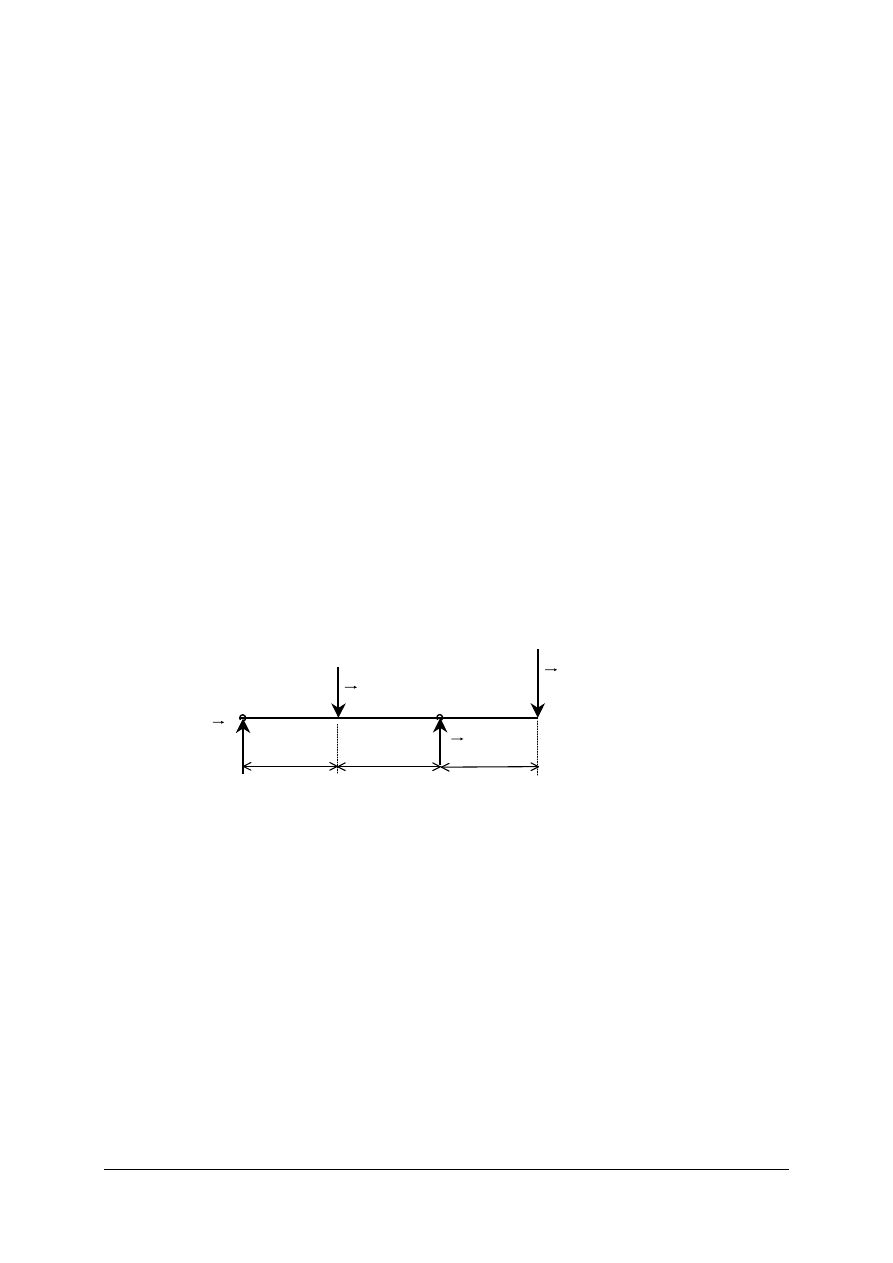
Ćwiczenie 6
Oblicz wartości momentów głównych względem punktów A i B.
Dane: F
1
= 10kN, F
2
= 20kN, F
3
= 5kN, F
4
= 10kN, a = 1 metr.
a a a
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) nanieść na rysunek symbole, zwroty i znaki momentów względem punktu A
występujących sił,
2) obliczyć moment główny względem punktu A,
3) obliczyć moment główny względem punktu B.
Wyposażenie stanowiska pracy:
−−−−
linijka z podziałką i trójkąt,
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia,
−−−−
kalkulator.
1
F
2
F
3
F
4
F
A
B

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) dodać wektory metodą geometryczną?
2) wyznaczyć reakcję w podporze ruchomej?
3) wyznaczyć reakcję w podporze stałej?
4) wyznaczyć reakcję w więzie wiotkim?
5) wyznaczyć siłę składową metodą wieloboku?
6) wyznaczyć siłę składową metodą równoległoboku?
7) rozłożyć siły na dwie składowe?
8) podać warunki równowagi płaskiego układu sił zbieżnych?
9) wyjaśnić różnice pomiędzy poszczególnymi rodzajami odkształceń ?
10) zdefiniować naprężenie styczne i normalne?
11) scharakteryzować rodzaje naprężeń w zależności od działającego
obciążenia zewnętrznego?
12) scharakteryzować wykres przedstawiający rozciąganie ?
13) opisać proces ścinania technologicznego i zginania?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
4.2. Połączenia rozłączne i nierozłączne
4.2.1. Materiał nauczania
Połączenia (złącza) należą do podstawowej grupy elementów występujących
w konstrukcjach.
Zadaniem połączenia jest całkowite lub częściowe zabezpieczenie przyłączy
(poszczególnych części maszyn) przed wzajemnym przemieszczaniem się i umożliwienie
przenoszenia obciążeń (sił, momentów) z jednej części na inne z nią współpracujące.
Połączenia konstrukcyjne nierozłączne są to takie połączenia, w których podczas
rozłączania następuje zniszczenie lub uszkodzenie elementów łączonych lub łączników.
Połączenia konstrukcyjne rozłączne są to takie połączenia, które umożliwiają wielokrotne
łączenie i rozłączanie elementów konstrukcyjnych bez ich uszkodzenia.
Ze względu na sposób powiązania elementów, połączenia konstrukcyjne można podzielić na:
−
bezpośrednie – tj. takie, w których elementy są ze sobą połączone bez elementów
pomocniczych,
−
pośrednie – tj. takie, w których wykorzystuje się dodatkowe elementy – łączniki np.:
śruby, nity, kołki.
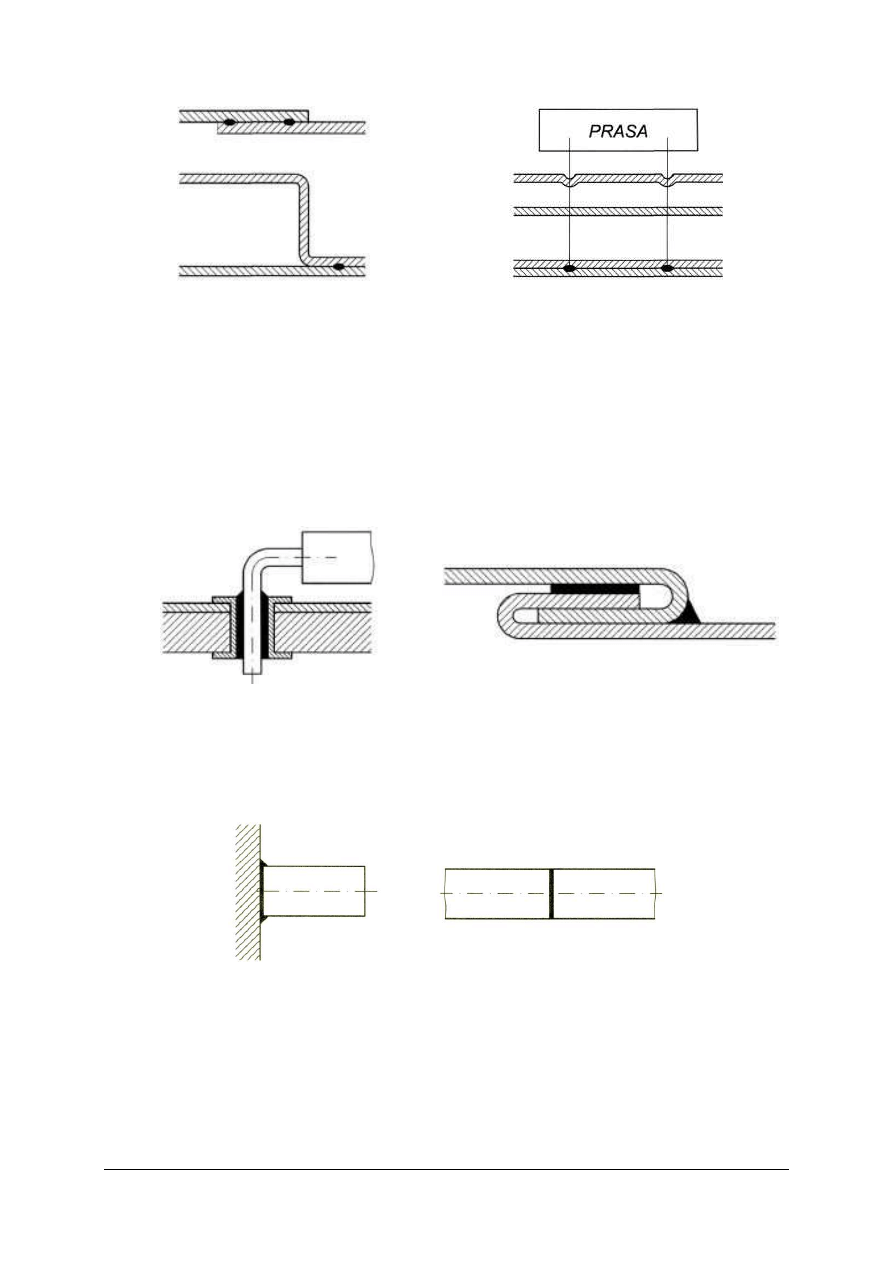
Połączenia nierozłączne
Nitowane pośrednie: zastosowanie: łączenie płaskich elementów konstrukcyjnych.
Rys. 18. Połączenie nitowane [18]
Nitowanie bezpośrednie
Rys. 19. Bezpośrednie połączenie płyt metalowych
cieńszej i grubszej [18]
Rys. 20. Bezpośrednie połączenie koła zębatego
z wałkiem [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
Połączenie za pomocą łapek
Rys. 21. Połączenie cienkich blach równoległych za
pomocą łapek [18]
Rys. 22. Połączenie cienkich blach prostopadłych za
pomocą łapek [18]
Połączenie za pomocą zawalcowania
Rys. 23. Połączenie rury cienkościennej z rurą lub prętem [18]
Połączenie poprzez zawinięcie
Rys. 24. Połączenia blach cienkich poprzez zawinięcie [18]
Połączenia spawane są stosowane rzadziej w konstrukcjach drobnych. Wykorzystywane
są natomiast głównie w konstrukcjach dużych, konstrukcjach wsporczych, dużych obudowach
i szkieletach konstrukcyjnych.
Rys. 25. Spawanie czołowe i pachwinowe blach [18]
Połączenia zgrzewane są stosowane w konstrukcjach wsporników, ścianek, obudów, itp.
Zgrzewanie jest procesem łączenia elementów konstrukcji polegającym na ich podgrzaniu
w miejscu styku do temperatury plastyczności przy równoczesnym odpowiednim nacisku.
Najczęściej jest stosowane zgrzewanie elektryczne oporowe: doczołowe, punktowe, garbowe
i liniowe.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
Rys. 26. Zgrzewanie punktowe [18]
Rys. 27. Zgrzewanie garbowe [18]
Metodą zgrzewania można łączyć ze sobą różnorodne metale i ich stopy. Do łączenia
blach cienkich powszechnie stosowane jest zgrzewanie punktowe.
Połączenia lutowane są to połączenia części metalowych za pomocą spoiwa nazywanego
lutem, którym jest metal o niższej temperaturze topnienia niż łączone elementy.
Lutowanie miękkie – jest stosowane często w połączeniach przewodzących prąd, lecz nie
przenoszących dużych sił. Ten typ lutowania stosowany jest również w konstrukcjach z blach
cienkich, np. obróbki dachów, rynny, itp. Luty miękkie są to stopy cyny i ołowiu z dodatkami
o temperaturze topnienia 183–300°C. Luty te posiadają małą wytrzymałość na ścinanie
14–22 MPa.
Rys. 28. Przyłączenie elementu elektronicznego do
płytki [18]
Rys. 29. Kształtowe
łączenie
blach
połączone
z lutowaniem [18]
Lutowanie twarde jest połączeniem o własnościach pośrednich pomiędzy lutowaniem
miękkim i spawaniem. Luty twarde są to spoiwa mosiężne, srebrne, brązowe, niklowe,
o temperaturze topnienia wyższej niż 500°C. Metale łączone: stal, miedź, stopy miedzi, stale
stopowe.
Rys. 30. Przykłady zastosowania lutowania twardego [18]
Połączenia klejone
Klejenie jest bardzo dogodnym sposobem łączenia elementów wykonanych z dowolnych
materiałów. Połączenie materiałów następuje dzięki siłom adhezji kleju do łącznych
powierzchni. Ostatnie lata charakteryzują się szybkim rozwojem i zastosowaniem połączeń
klejonych. Nowe kleje stosowane zarówno do klejenia przyłączy metalowych, jak
i niemetalowych w niektórych przypadkach umożliwiają znacznie dogodniejsze warunki
wykonywania połączeń o dobrych właściwościach wytrzymałościowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
Połączenia rozłączne
Połączenia wciskowe mogą być wielokrotnie łączone i rozłączane pod warunkiem
nieuszkodzenia powierzchni styku. Połączenie wciskowe uzyskuje się poprzez wtłoczenie
czopa jednej części do otworu drugiej. Na skutek wtłoczenia w obydwu elementach powstają
odkształcenia sprężyste. W połączeniach wciskowych stosowane jest pasowanie wtłaczane
np. H7/s7, dlatego można je nazywać połączeniami wtłaczanymi. Na poniższych rysunkach
przedstawione są przykłady połączeń wciskowych.
Rys. 31. Połączenie wciskowe wałka z kołnierzem o wywiniętej piaście [18]
Rys. 32. Połączenie wciskowe kształtowe; w tym przypadku nie jest wymagane zachowanie dużej dokładności
wykonania powierzchni łączonych [18]
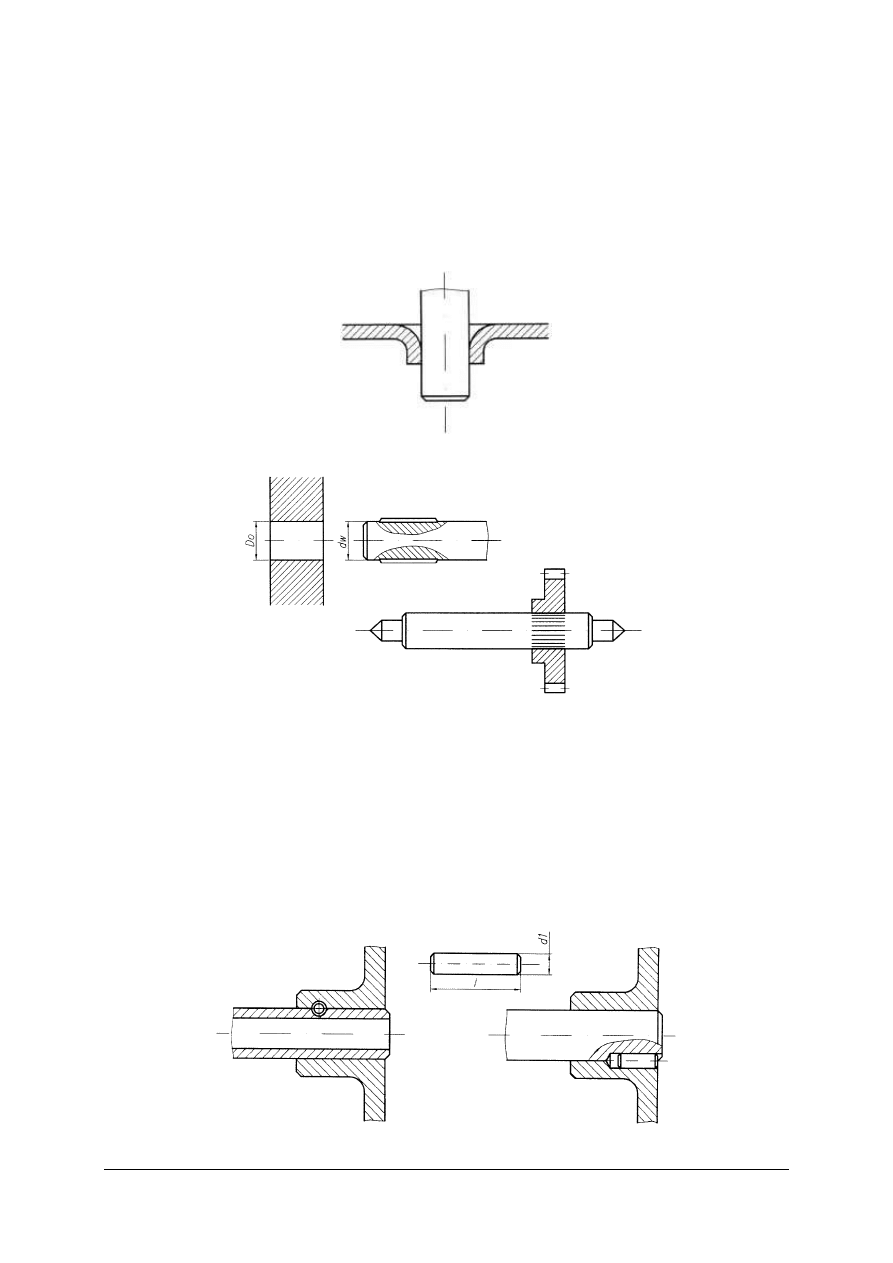
Połączenia kształtowe
Połączenia kołkowe są to połączenia realizowane przy pomocy elementów
konstrukcyjnych o kształcie walca lub stożka – nazywanych kołkami. Rozróżnia się:
−
kołki złączne – przeznaczone do łączenia części mechanicznych,
−
kołki ustalające – przeznaczone do ustalania wzajemnego położenia części
mechanicznych,
−
kołki prowadzące – pełniące rolę elementów prowadzących w parach kinematycznych.
Kształty i wymiary kołków określają normy.
Rys. 33. Połączenia konstrukcyjne przy pomocy kołków złącznych [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Rys. 34. Zastosowanie kołków do ustalania położenia części [18]
Rys. 35. Zastosowanie kołka do prowadzenia części w przypadku ich ruchu względnego [18]
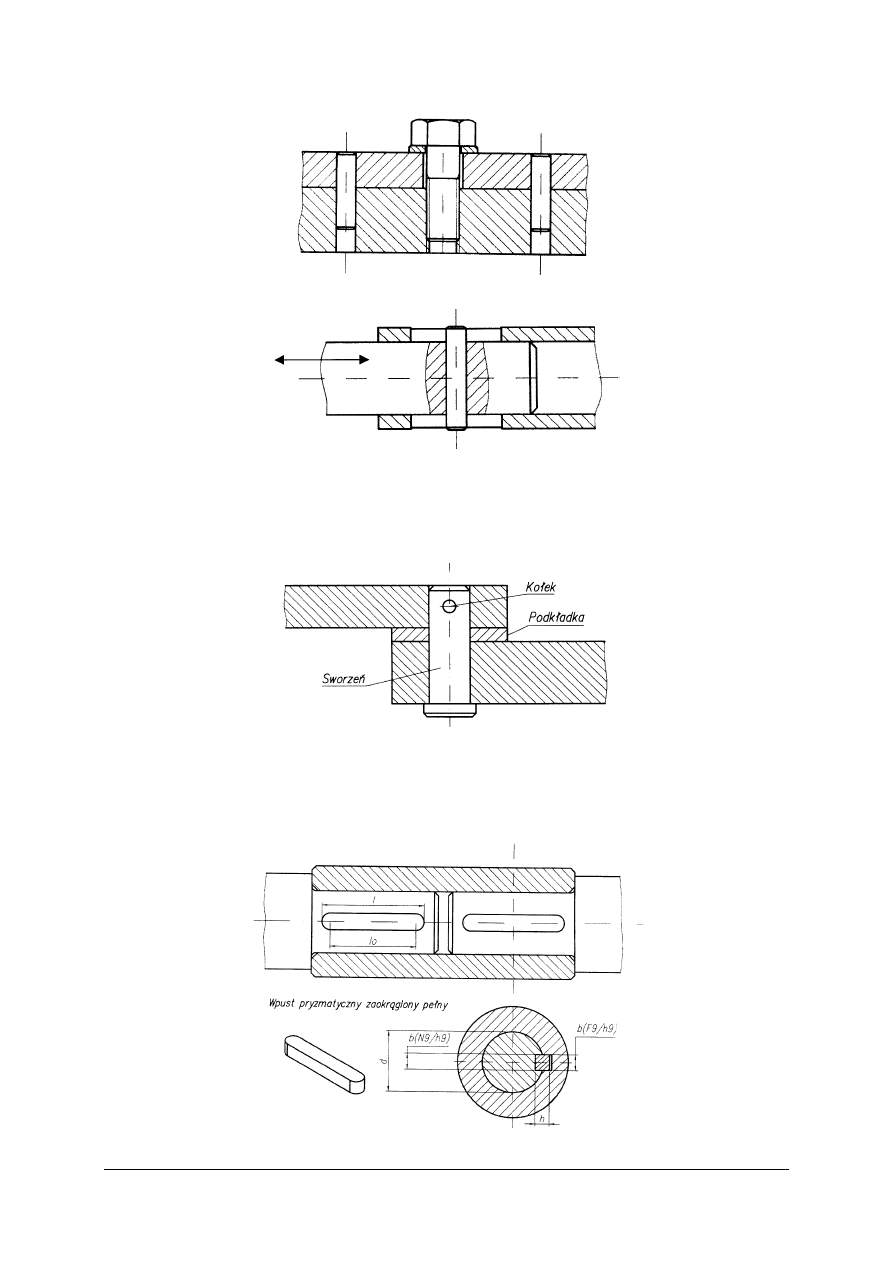
Połączenia sworzniowe
Sworznie są to krótkie wałki służące zwykle do tworzenia połączeń przegubowych (par
kinematycznych). Sworznie są wykonywane jako: walcowe (pełne i drążone) oraz kształtowe
z łbem lub bez łba.
Rys. 36. Typowe połączenie sworzniowe tworzące przegub walcowy [18]
Połączenia wpustowe
W połączeniu wpustowym elementem łączącym jest wpust. Kształty oraz wymiary
wpustów są znormalizowane. Zastosowanie wpustów: połączenia kół z wałkami, sprzęgieł
z wałkami oraz korb, dźwigni z wałkami, itp.
Rys. 37. Połączenie wpustowe czopów wałów i sprzęgła [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Połączenia wpustowe są wykonywane jako: spoczynkowe – pasowanie N9/h9 w wałku
i w piaście, ruchowe – pasowanie N9/h9 w wałku oraz F9/h9 w piaście.
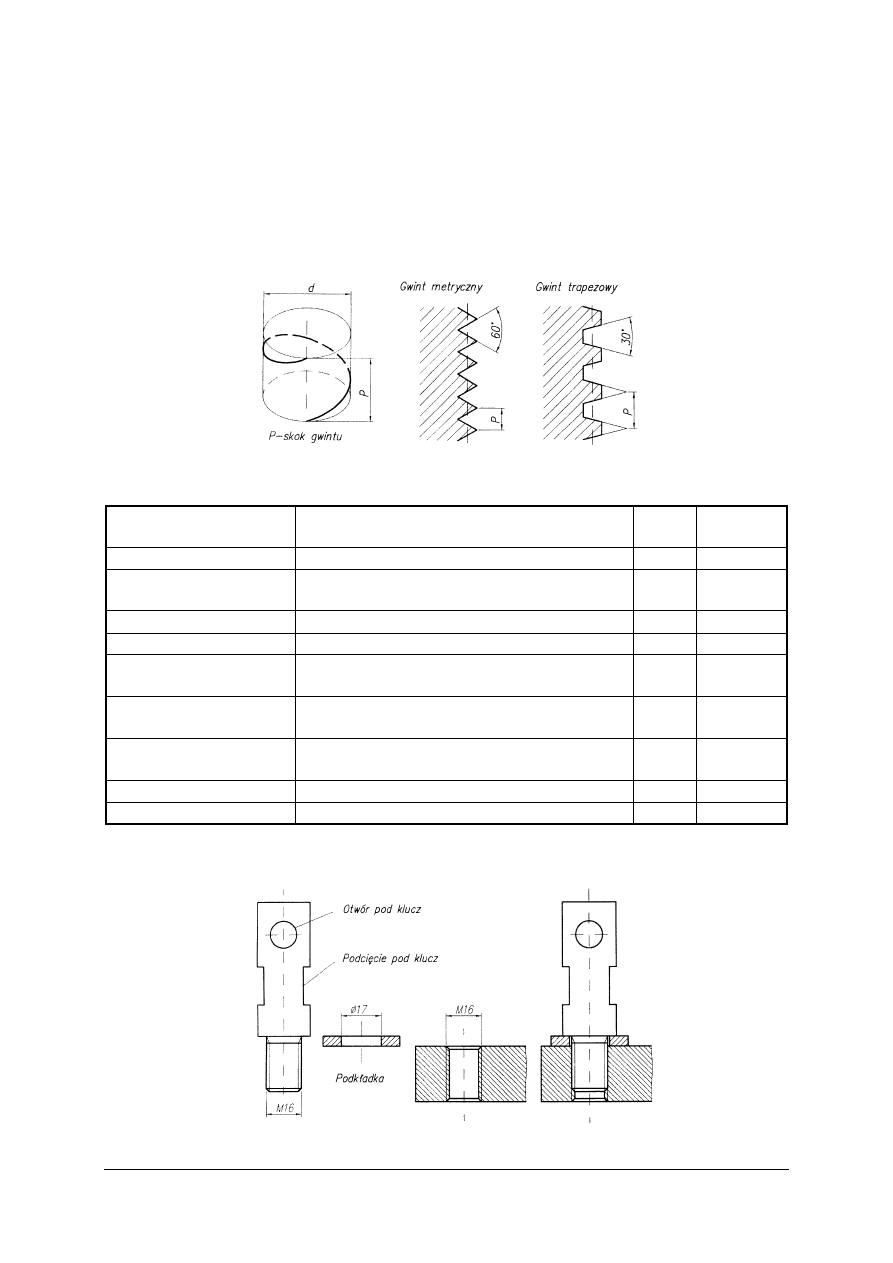
Połączenia gwintowe
Rodzaje: połączenia pośrednie, połączenia bezpośrednie. W połączeniach pośrednich
wykorzystywane są łączniki gwintowe: wkręty, śruby, nakrętki. W połączeniach
bezpośrednich części są łączone za pomocą wykonanego na nich gwintu wewnętrznego
i zewnętrznego. Najczęściej stosowany jest gwint metryczny zwykły lub drobnozwojowy.
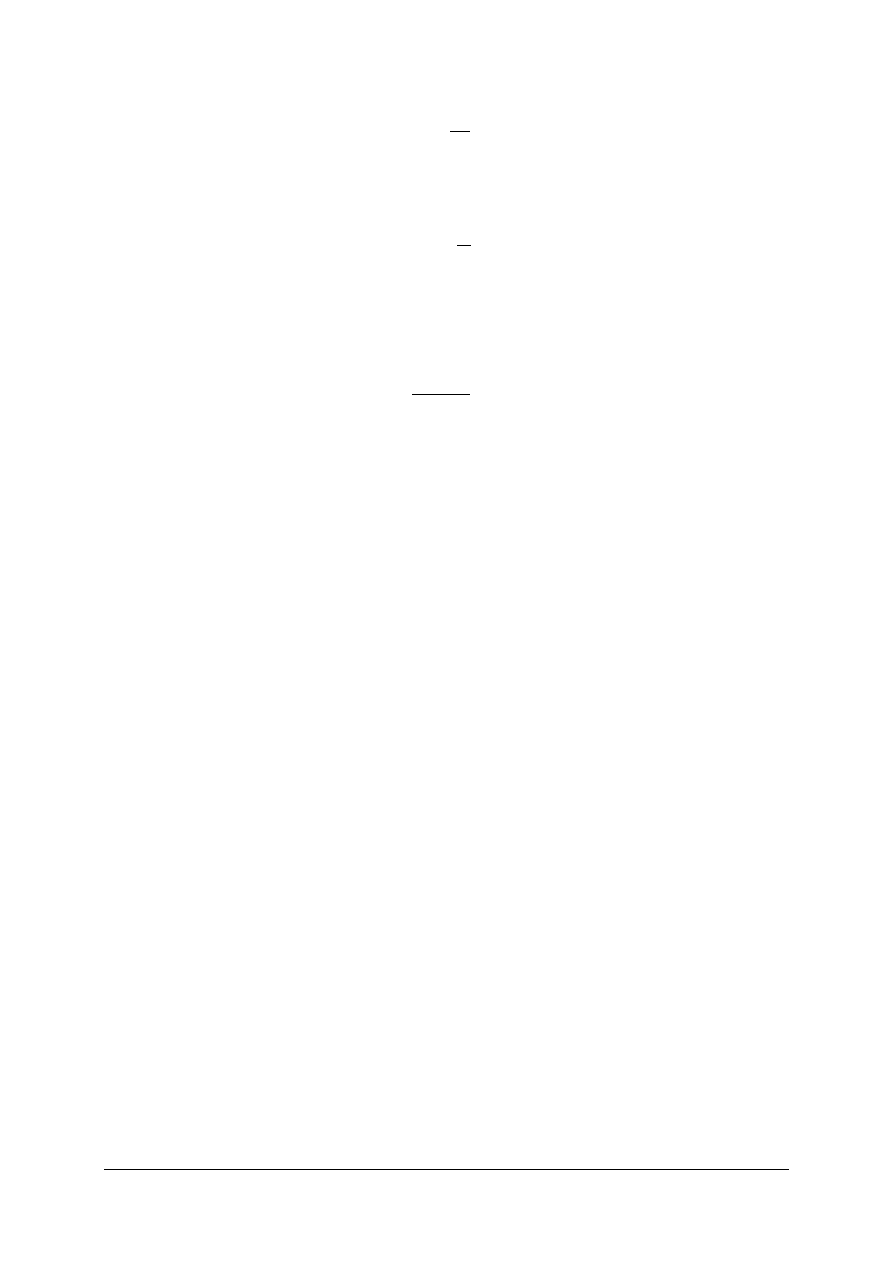
Rys. 38. Parametry geometryczne gwintu [18]
Tabela 1. Wybrane rodzaje połączeń gwintowych i ich oznaczenia
Rodzaj gwintu
Wymiary, które należy podać w oznaczeniu
Znak
Przykład
Metryczny zwykły
średnica zewnętrzna śruby w mm
M
M20
Metryczny drobnozwojowy
średnica zewnętrzna śruby x skok w mm
M
M16x1
Calowy
średnica zewnętrzna śruby w calach
3/4”
Rurowy walcowy
średnica wewnętrzna rury w calach
G, Rp
G1/2”
Trapezowy symetryczny
średnica zewnętrzna śruby x skok w mm
Tr
Tr24x5
Trapezowy niesymetryczny
średnica zewnętrzna śruby x skok w mm
S
S22x6
Okrągły
średnica zewnętrzna śruby w mm x skok w calach
Rd
Rd32x1/8”
Stożkowy metryczny
średnica nominalna x skok w mm
St. M
St. M6x1
Rowerowy
średnica nominalna gwintu w mm
Rw
Rw9,5
Połączenia gwintowane bezpośrednie części łączone bezpośrednio muszą mieć kształt
umożliwiający ich skręcenie.
Rys. 39. Przykład bezpośredniego połączenia gwintowego [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
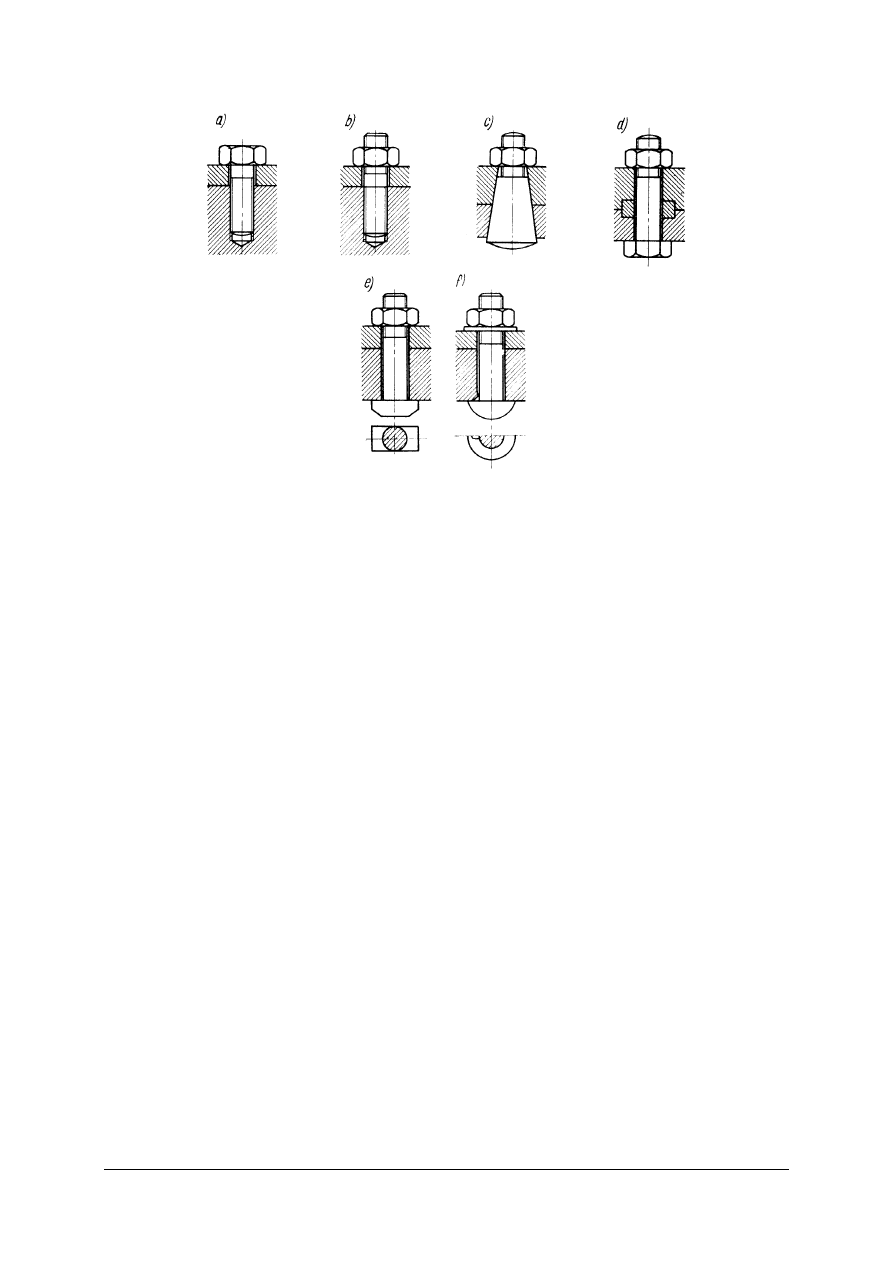
Rys. 40. Połączenia gwintowe: a) wkrętem, b) śrubą dwustronna c) śruby pasowaną o sworzniu stożkowym,
d) śrubą nie pasowaną z łbem sześciokątnym, lecz pasowanym pierścieniem, e) śrubą o łbie
młoteczkowym, f) śrubą, o łbie grzybkowym z noskiem [5, s. 54]
Połączenia gwintowane pośrednie
Wkrętami nazywane są łączniki gwintowe z gwintami zewnętrznymi i łbem
zaopatrzonym w odpowiednie w nacięcia umożliwiające wkręcenie ich w otwór gwintowany
za pomocą wkrętaka.
Śruby są stosowane razem z nakrętkami i służą do łączenia dwóch lub więcej części.
Śruby są zakończone łbem kształtowym umożliwiającym ich przykręcenie za pomocą klucza.
Najczęściej są stosowane śruby z łbem sześciokątnym.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaki jest podział połączeń konstrukcyjnych?
2. Czym charakteryzują się połączenia bezpośrednie?
3. Czym charakteryzują się połączenia pośrednie?
4. Jakie są rodzaje połączeń nierozłącznych?
5. Jakie są rodzaje połączeń rozłącznych?
6. Jaka występuje zasadnicza różnica między połączeniami rozłącznymi a nierozłącznymi?
7. Jakie części maszyn najczęściej łączą połączenia wpustowe?
8. W jakim celu stosuje się połączenia kołkowe?
9. Jakie połączenie jest najczęściej stosowane w budowie maszyn?
10. Jak klasyfikujemy połączenia spajane?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
4.2.3. Ćwiczenia
Ćwiczenie 1
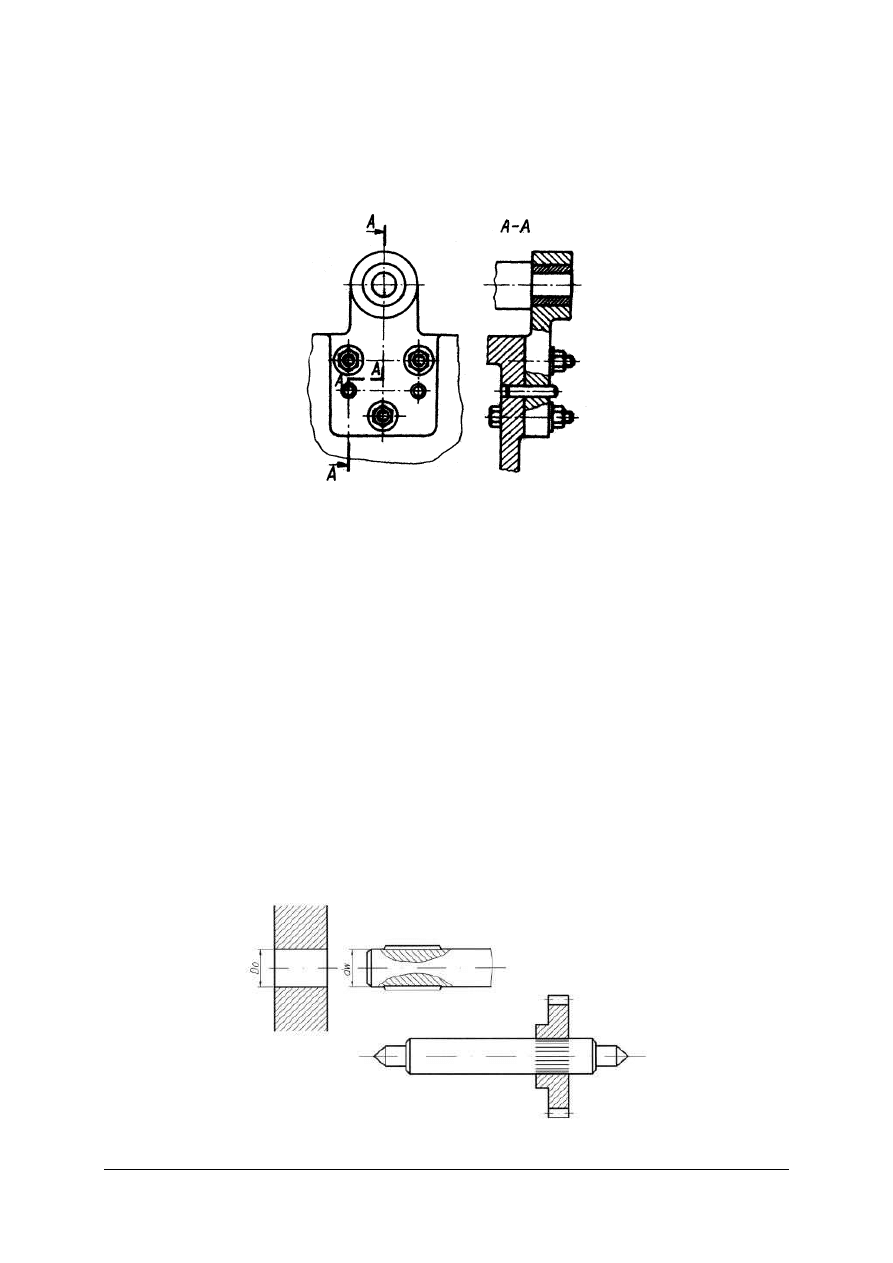
Wskaż wszystkie widoczne połączenia na rysunku oraz opisz zadania, jakie spełniają
wobec przyłączy. Korpus maszyny (na rys. – wyrwany fragment).
Rysunek do ćwiczenia 2 [7, s.131]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się, w jaki sposób są ustalane między sobą przyłącza,
3) zapoznać się z informacjami na temat połączeń, które zamieszczone są w materiałach
dydaktycznych,
4) dokonać klasyfikacji widocznych połączeń,
5) przeanalizować zadania (funkcje) poszczególnych połączeń w układzie korpus maszyny –
łożysko,
6) opisać wyniki,
7) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
−−−−
kartka papieru, długopis,
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
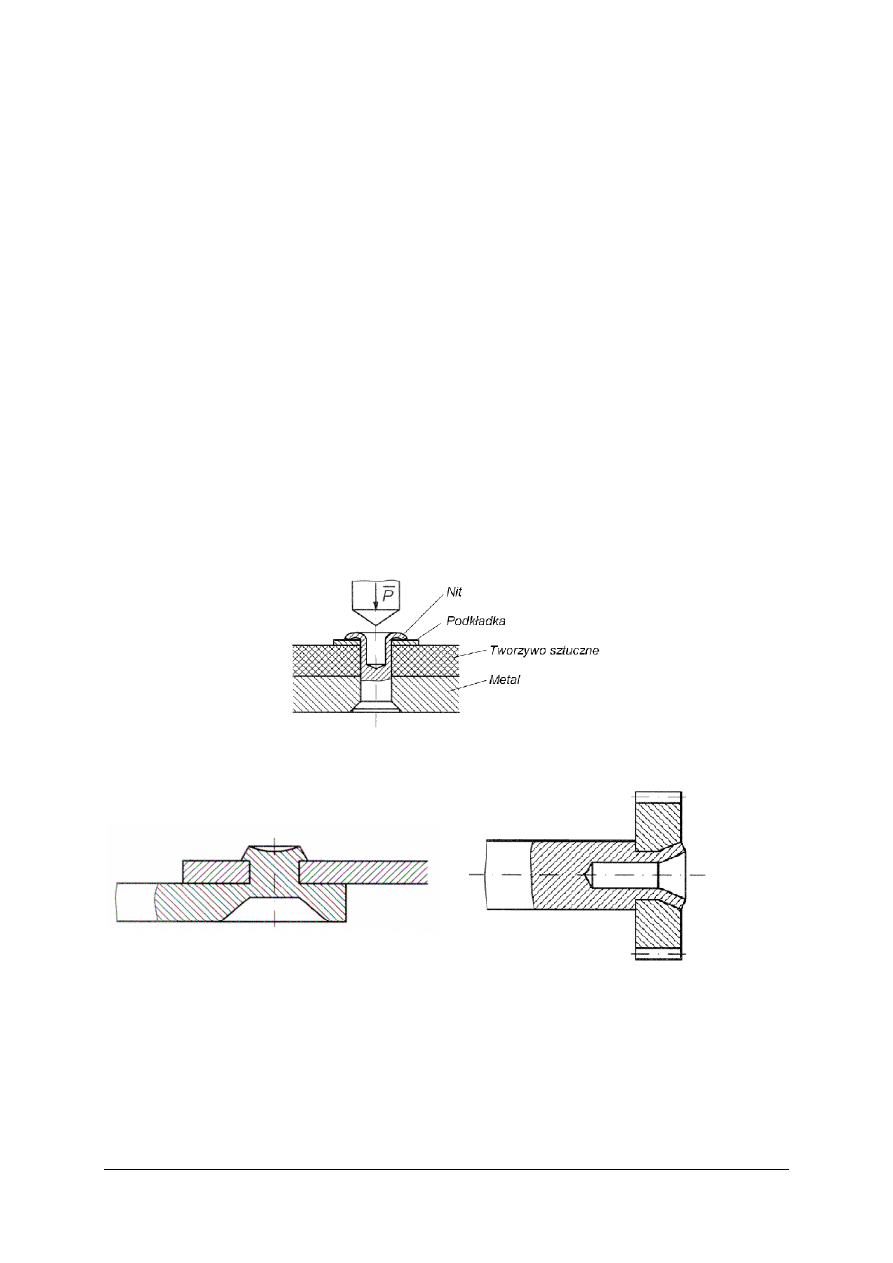
Ćwiczenie 2
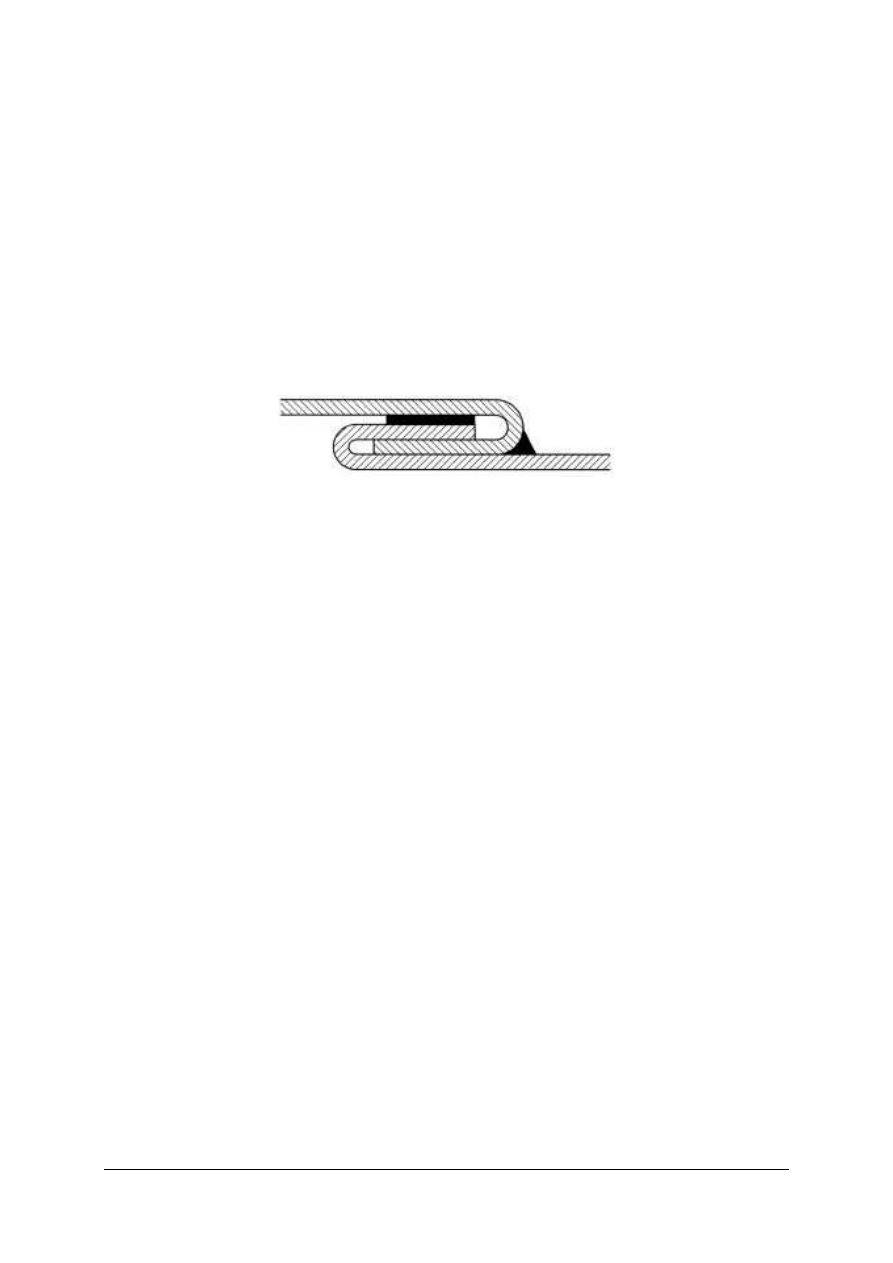
Opisz rodzaj połączenia przedstawionego na rysunku.
Rysunek do ćwiczenia 2 [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) rozpoznać rodzaj połączenia,
3) opisać zastosowanie połączenia,
4) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
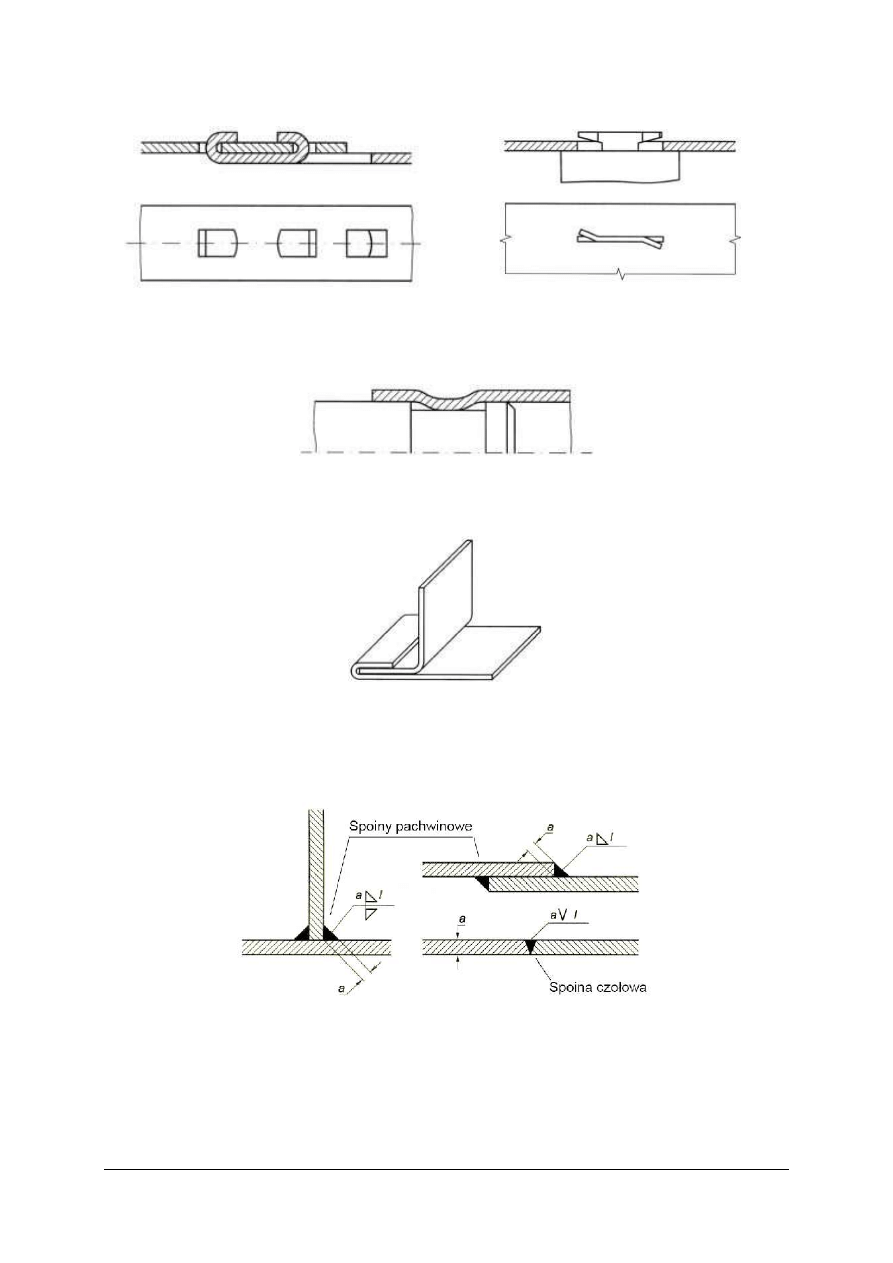
Ćwiczenie 3
Scharakteryzuj połączenie przedstawione na rysunku.
Rysunek do ćwiczenia 3 [18]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) rozpoznać rodzaj połączenia,
3) opisać zastosowanie połączenia,
4) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 4
Scharakteryzuj połączenia wpustowe.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) dokonać podziału połączeń wpustowych,
3) opisać zastosowanie połączenia,
4) zaprezentować wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
−−−−
literatura zgodna z punktem 6 Poradnika dla ucznia.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) podzielić połączenia konstrukcyjne?
2) scharakteryzować połączenia bezpośrednie?
3) scharakteryzować połączenia pośrednie?
4) wymienić połączenia nierozłączne?
5) wymienić połączenia rozłączne?
6) rozpoznać rodzaje połączeń?
7) wyjaśnić, jakie zadanie spełnia połączenie?
8) określić, jak klasyfikuje się połączenia?
9) wyjaśnić, jakie zabiegi należy wykonać aby uzyskać połączenie
skurczowe?
10) wymienić elementy łączące (łączniki) połączeń kształtowych?
11) określić, jakie części maszyn najczęściej łączą połączenia wpustowe?
12) wyjaśnić, w jakim celu stosuje się połączenia kołkowe?
13) określić, jak dzielimy połączenia spajane?
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
4.3. Części maszyn i mechanizmów
4.3.1. Materiał nauczania
Osie i wały – części, na których osadza się różne elementy (inne części) lub zespoły
maszyn mające wykonywać ruch obrotowy lub wahadłowy. Osie i wały mają zwykle przekrój
kołowy albo (bardzo rzadko) sześciokątny lub inny i są podparte w łożyskach. Rozróżnia się
osie i wały (tabela 2) gładkie, o prawie niezmiennym przekroju na całej długości oraz
kształtowe – o zmiennych przekrojach, dostosowanych do obciążenia i funkcji osi lub wału.
Osie są z reguły proste, natomiast wały mogą być proste lub wykorbione.
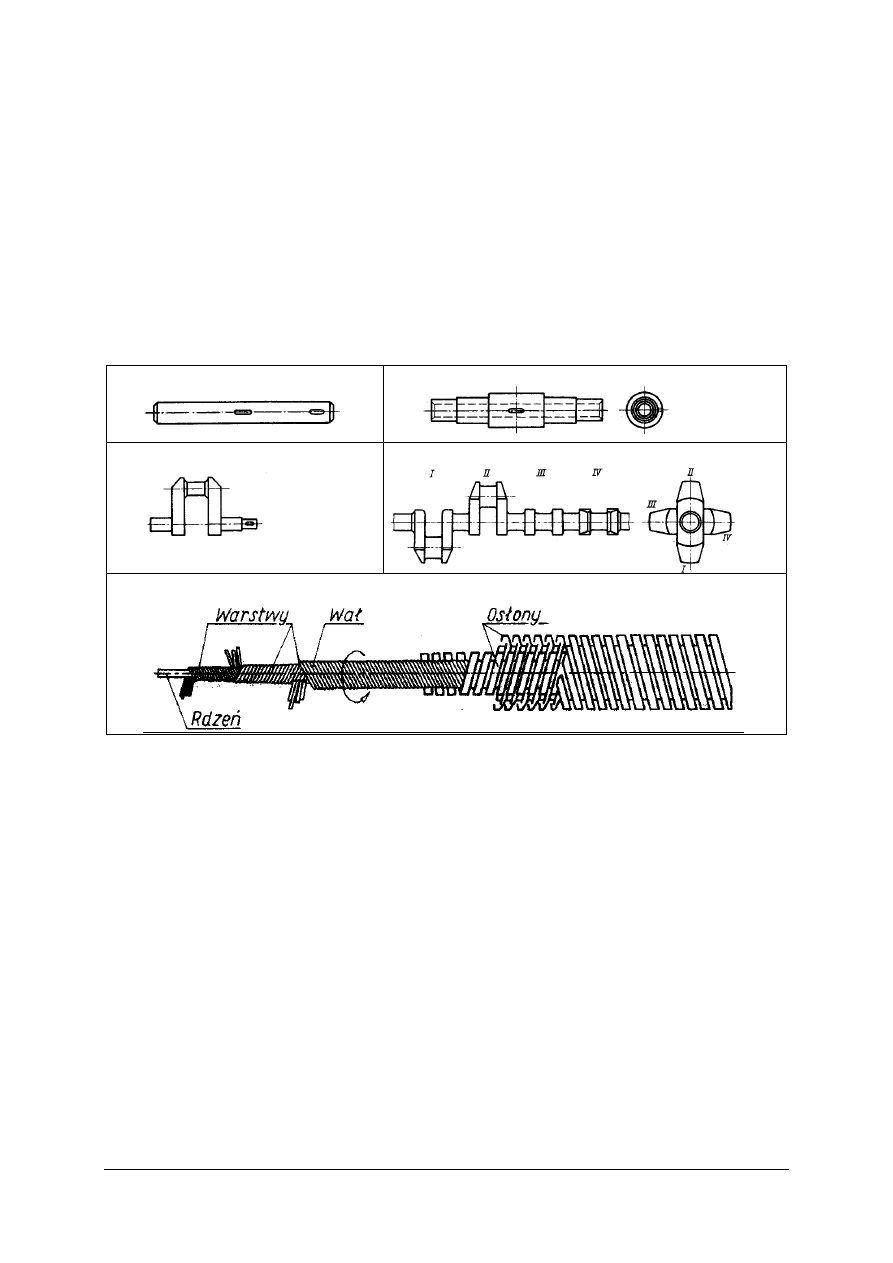
Tabela 2. Różne postacie wałów [5, s. 316]
Wał prosty pełny gładki
Wał prosty drążony schodkowy (zmienny przekrój)
Wał korbowy z jednym wykorbieniem
Wał korbowy z czterema wykorbieniami
Wał giętki
Wśród osi wyodrębniamy dwie grupy. Osie stałe – w czasie pracy mechanizmu pozostają
nieruchome, a jedynie części maszyn osadzone na nich wykonują ruch obrotowy lub
wahadłowy. Osie ruchome – obracają się z osadzonymi na nich częściami maszyn.
Wał jest zawsze ruchomy i obraca się razem z osadzanymi na nim częściami maszyn.
Wały zatem służą do napędzania obracających się części. Zależnie od liczby łożysk, będących
podporami wałów, rozróżnia się wały dwu- i wielopodporowe oraz (bardzo rzadko
stosowane) – jednopodporowe.
Osie i wały wykonuje się zwykle ze stali niestopowej zwykłej jakości (St4–St6 – według
nowych oznaczeń są to (S275, E295, E335), wyższej jakości (35, 45,5 5) -odpowiednio: (C35,
C45 i C55) lub ze stali konstrukcyjnej stopowej do ulepszania cieplnego. Stale konstrukcyjne
stopowe do nawęglania stosuje się wówczas, gdy bardziej istotna jest twardość powierzchni
niż wytrzymałość rdzenia wału. Wały korbowe wykonuje się również jako odlewane ze
staliwa, żeliwa modyfikowanego i sferoidalnego.
Średnice wałów są znormalizowane. Ich wielkość uzależniona jest od przenoszonej przez
wał mocy przedzielonej przez prędkość obrotową wału, a także od materiału, z którego dany
wał ma być wykonany.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
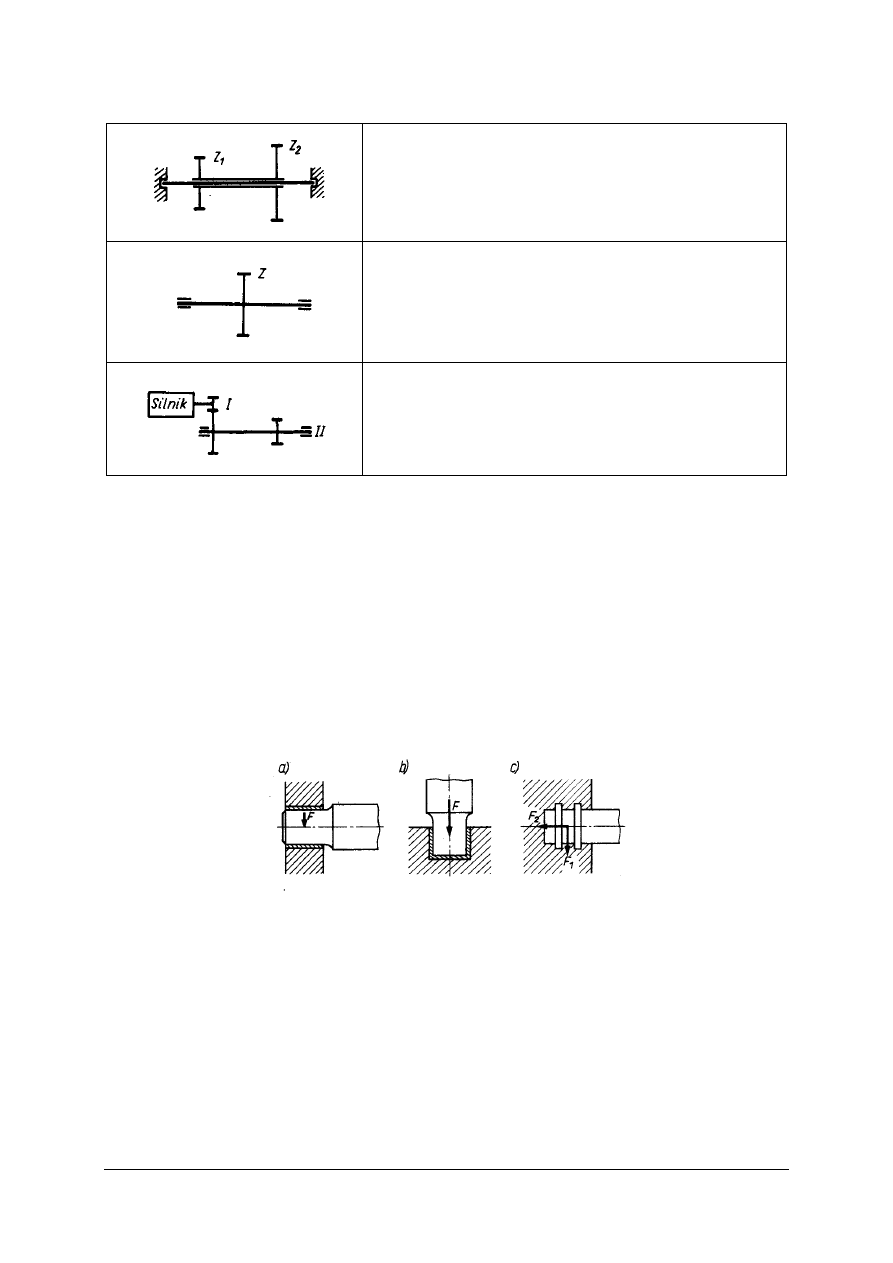
Tabela 3. Porównanie osi i wałów [5, s. 316]
Oś nieruchoma z parą kół zębatych z
1
i z
2
, osadzonych na tulei
(łożysko ślizgowe).
Oś nie przenosi momentu skręcającego.
Oś
ruchoma,
osadzona
w
dwu
łożyskach,
z osadzonym na niej kołem zębatym z.
Oś nie przenosi momentu skręcającego.
I – wał silnika z osadzonym na nim kołem zębatym – skręcany
na długości wirnik – koło zębate.
II – wał przenoszący napęd od silnika – skręcany na długości
pomiędzy kołami zębatymi.
Wały przenoszą momenty skręcające.
Do osadzenia wału w łożyskach oraz kół, korbowodów lub innych części na wale służą
czopy końcowe i środkowe. Czopy to odcinki osi i wałów stykające się z częściami
współpracującymi (z łożyskami, piastami kół pasowych, zębatych, itd.). Rozróżnia się czopy
ruchowe i czopy spoczynkowe. Czopy ruchowe współpracują z panewkami łożysk
ślizgowych z kołami przesuwnymi lub obracającymi się względem nieruchomej osi, itp.
natomiast czopy spoczynkowe współpracujące z elementami osadzonymi na stałe względem
wału i obracającymi się wraz z nim. Czopy pod względem kształtu można podzielić na
stożkowe, walcowe, kulowe, wielokołnierzowe, wielowypustowe, itp.
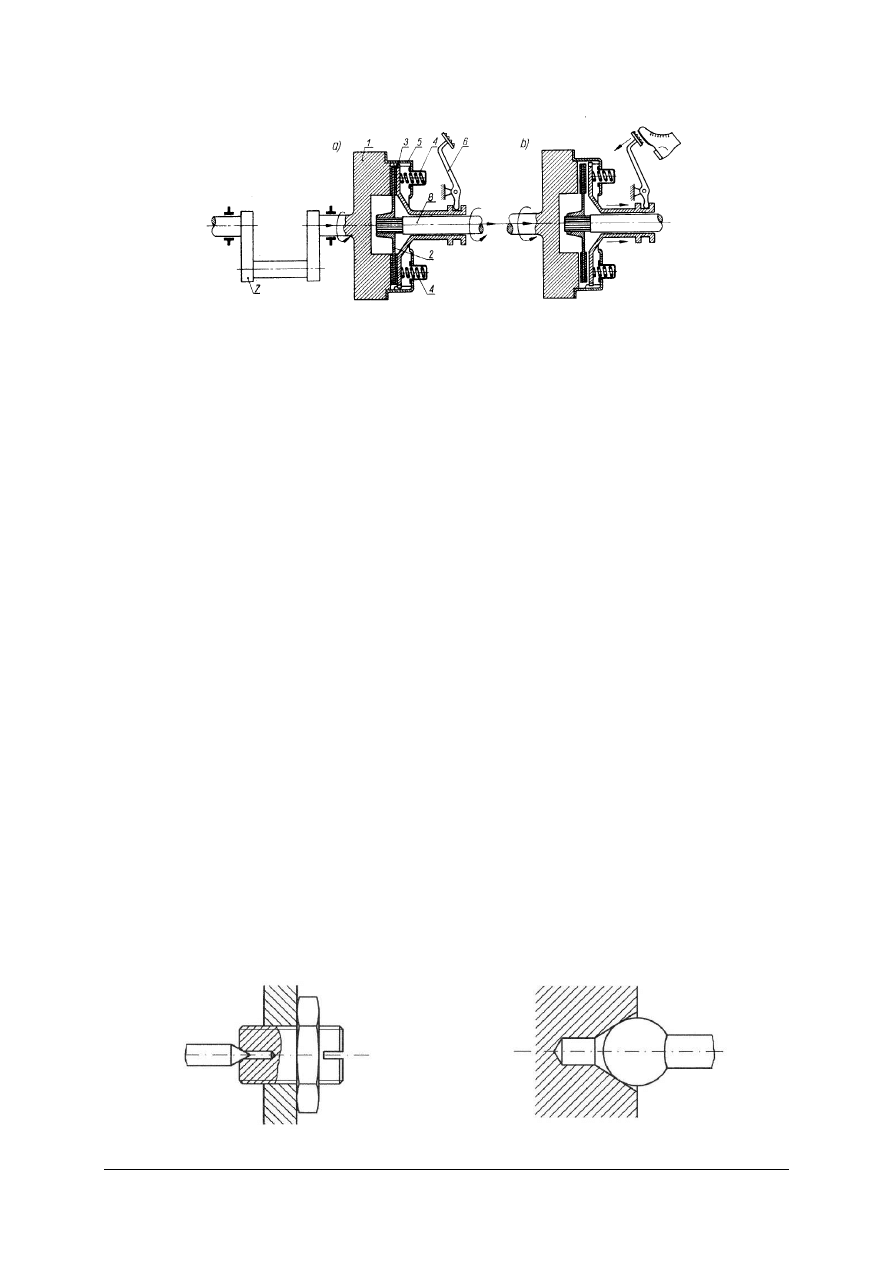
W zależności od kierunku przenoszenia sił czopy dzieli się na (rys. 41): poprzeczne (siła
działająca jest prostopadła do osi czopa), wzdłużne (siła działa wzdłuż osi czopa) oraz
poprzeczno-wzdłużne (przenoszące siły skośne względem swojej osi).
Rys. 41. Czopy: a) poprzeczny, b) wzdłużny, c) poprzeczno-wzdłużny [5, s. 317]
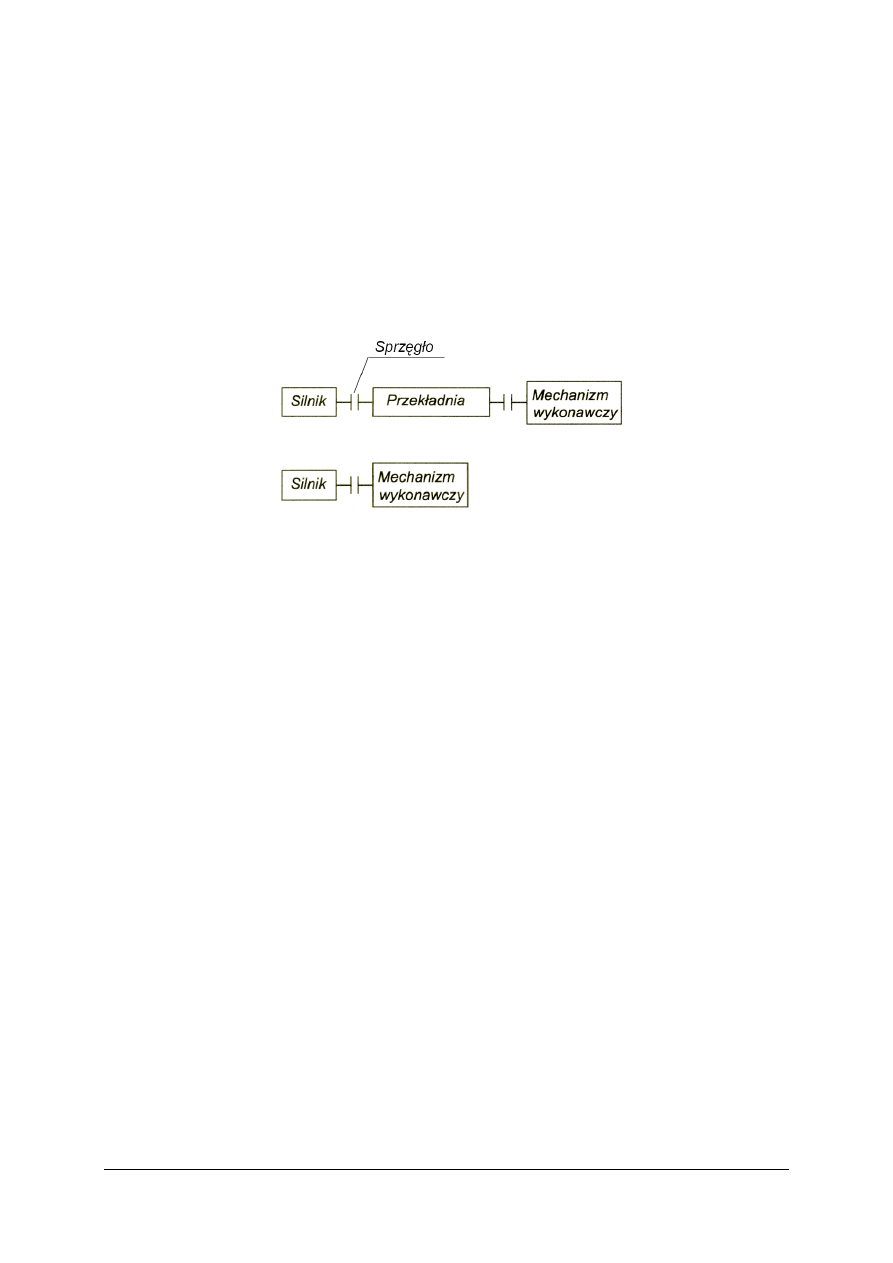
Sprzęgła
Sprzęgła to urządzenia, które służą do łączenia wałów w celu przeniesienia ruchu
obrotowego z jednego wału na drugi bez zmiany kierunku obrotowego. W ogólnym
przypadku można określić, że sprzęgło składa się z członu czynnego, członu biernego
i łącznika.
Przez człon rozumie się zespół elementów sprzęgła osadzony na wale napędzającym lub
napędzanym, natomiast łącznikiem nazywa się części (kołki, śruby, itd.) lub czynnik
(np. ciecz) przekazujący moment obrotowy z członu czynnego na człon bierny.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Sprzęgła stosuje się:
−
gdy wał wobec znacznej swej długości składa się z kilku odcinków, stosuje się sprzęgła
nierozłączne (np. sztywne),
−
również do zabezpieczenia niektórych mechanizmów przed zniszczeniem.
Sprzęgła te noszą nazwę sprzęgieł bezpieczeństwa, do czasowego włączania i wyłączania
pewnych części wału podczas stałego obracania się części napędzających służą sprzęgła
sterowane, przede wszystkim asynchroniczne (np. cierne w samochodach) lub sprzęgła
synchroniczne (np. kłowe), sprzęgła mogą łączyć również wały o osiach leżących nie tylko na
jednej prostej, ale przecinających się pod pewnym kątem lub też przesuniętych równolegle.
W tym przypadku stosuje się tzw. sprzęgła samonastawne lub podatne.
Rys. 42. Schemat typowego układu napędowego, w którym występują sprzęgła [18]
Ze względu na zasadę działania sprzęgła możemy podzielić na: mechaniczne,
hydrauliczne, elektromagnetyczne, magnetyczne. Największe zastosowanie mają sprzęgła
mechaniczne.
W zależności od tego czy człony sprzęgła (czynny i bierny) są połączone na stałe czy też
mogą być łączone i rozłączane, sprzęgła dzielimy na nierozłączne (stałe) oraz rozłączne
(włączalne).
Sprzęgła nierozłączne
Są to takie sprzęgła, w których człony: czynny i bierny są połączone trwale, tzn. nie
można ich rozłączać w czasie pracy. Sprzęgła te stosuje się, gdy rozłączenie członów może
nastąpić dopiero podczas demontażu sprzęgła i niejednokrotnie częściowo maszyny.
Sprzęgła nierozłączne dzielimy na:
−
sprzęgła sztywne, uniemożliwiające przesunięcia osi łączonych wałów w czasie pracy,
−
sprzęgła samonastawne, umożliwiające niewielkie przesunięcia wzdłużne i poprzeczne
wałów,
−
sprzęgła podatne, w których łącznikiem są elementy sprężyste.
Do najprostszych należą sprzęgła sztywne. Do tej grupy zalicza się sprzęgła tulejowe,
łubkowe i kołnierzowe. Sprzęgła te wymagają zachowania dokładnej współosiowości
łączonych wałów.
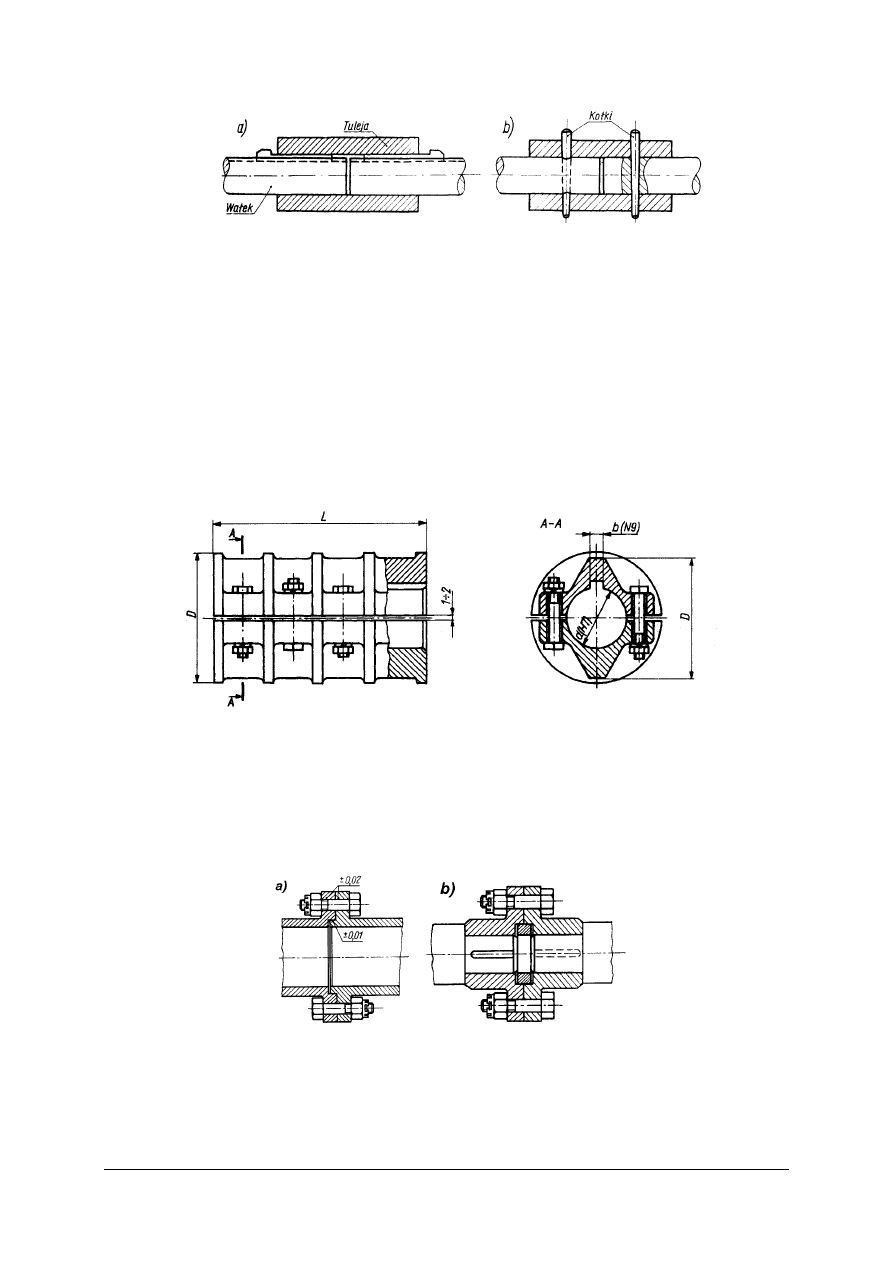
Sprzęgła tulejowe
Tuleję wykonuje się z żeliwa, stali lub staliwa (rys. 43). Tuleja powinna być dość ciasno
osadzona na wałku. Sprzęgło tulejowe połączone z wałami za pomocą kołków ma zwykle
zastosowanie jako tzw. sprzęgło bezpieczeństwa. W tym celu jeden z kołków wykonuje się
z materiału o mniejszej wytrzymałości. W razie wzrostu obciążenia ponad dopuszczalną
wartość kołek ulega ścięciu i wały tracą wzajemne połączenie.
Łącznikami mogą być również wpusty lub kliny. Stosuje się także połączenia skurczowe
tulei z wałem.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Rys. 43. Sprzęgła tulejowe połączone z wałami: a) za pomocą klinów, b) za pomocą kołków [5, s.69]
Wady sprzęgieł tulejowych polegają na: przenoszeniu jedynie małych mocy (szczególnie
sprzęgła połączone kołkami), niemożności dokładnego środkowania wałów (głównie wskutek
użycia klinów) oraz konieczności stosowania ochron przy zamocowaniu klinami,
aby obsłudze zapewnić bezpieczeństwo pracy.
Sprzęgła łubkowe
Składa się z dwóch łubek, które są zaciskane na wałach za pomocą śrub (rys. 44).
Sprzęgło przenosi moment obrotowy dzięki istnieniu tarcia między łubkami a wałem.
Uzyskanie odpowiedniego docisku łubek do wału umożliwia szczelina między łubkami
(1–2 mm). Wpusty służą do osadzenia sprzęgła na wałach oraz odgrywają rolę dodatkowego
zabezpieczenia przed poślizgiem, zwłaszcza przy chwilowych przeciążeniach.
Rys. 44. Sprzęgło sztywne łubkowe śrubowe [14, s. 372]
Sprzęgła kołnierzowe
Składają się z dwóch tarcz złączonych śrubami: Tarcze osadza się na wałach najczęściej
za pomocą wpustów. W celu zapewnienia współosiowego ustawienia członów (tarcz)
w sprzęgłach wykonuje się wytoczenia środkujące na płaszczyznach czołowych (rys. 45 a)
lub ustala się na dodatkowym elemencie (pierścień centrujący) (rys. 45b).
Rys. 45. Sposoby łączenia wałów za pomocą sprzęgieł: a) kołnierzowego, b) tarczowego [7, s. 231]
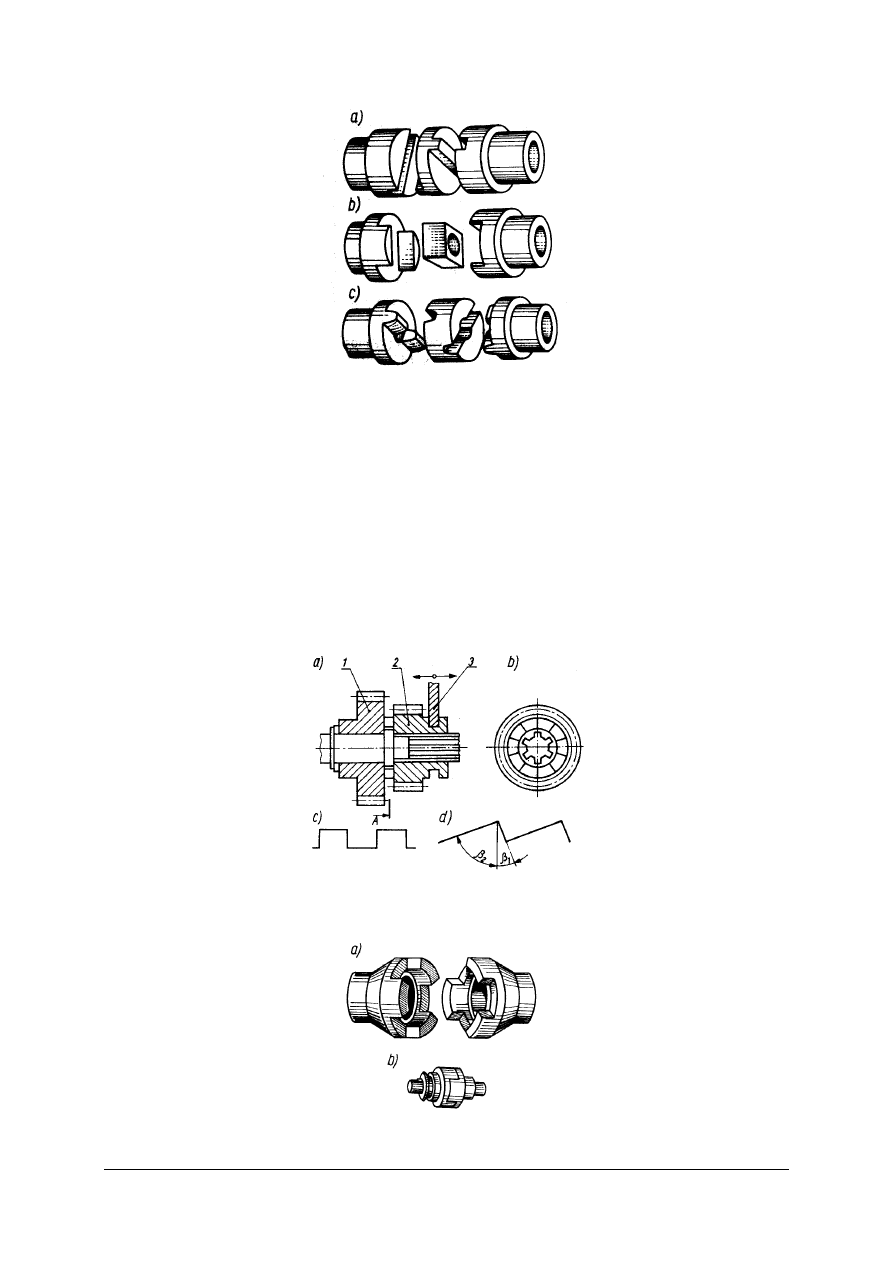
Sprzęgła Oldhama
Tego rodzaju sprzęgło dopuszcza przesunięcia poprzeczne oraz odchylenia kątowe
(rys. 46). Tarcze sprzęgła są osadzone na wałach, a rolę łącznika odgrywa osobna tarcza
(wkładka z materiału o małym współczynniku tarcia) współpracująca z kłami obu tarcz.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
Rys. 46. Sprzęgło Oldhama: a) z kłami prostymi, b) z wkładka[tekstolitową, c) z kłami o zarysie
ewolwentowym [14, s. 376]
Sprzęgła kłowe
Są zwykle stosowane do łączenia dwóch elementów osadzonych na tym samym wale,
np.: kół zębatych w skrzynkach przekładniowych. Sprzęgnięcie wałów uzyskuje się przez
wsunięcie występów jednej tarczy we wgłębienia drugiej. Sprzęgła te są włączane jedynie
w stanie spoczynku. Są to sprzęgła sterowane asynchroniczne. Jeśli zarysy kłów są pochylone
to sprzęgła takie mogą pracować jako bezpieczeństwa (przy zbyt dużym momencie zęby
przeskakują po sobie) lub jako jednokierunkowe (w jednym kierunku przy małym kącie
pochylenia zarysu zęba przenoszą moment, w drugim – przeskakują po sobie).
Sprzęgła kłowe można sklasyfikować także jako samonastawne, ponieważ umożliwia
przesunięcia wzdłużne wałów w granicach luzu osiowego. Przesunięcia tego rodzaju
występują najczęściej wskutek wydłużeń cieplnych.
Rys. 47. Sprzęgło kłowe: a) przekrój osiowy sprzęgła; b) widok czołowy koła z kłami w sprzęgle sterowanym
z zewnątrz; c) rozwinięcie zarysów bocznych kłów w sprzęgle sterowanym z zewnątrz, d) rozwinięcie
zarysów kłów w sprzęgle jednokierunkowym lub przeciążeniowym (bezpieczeństwa) 1 – koło
napędzające, 2 – koło napędzane, 3 – wodzik (element sterujący) [13, s. 147]
Rys. 48. Sprzęgło kłowe: a) tarcza sprzęgła, b)sprzęgło w stanie włączonym [5, s.70]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
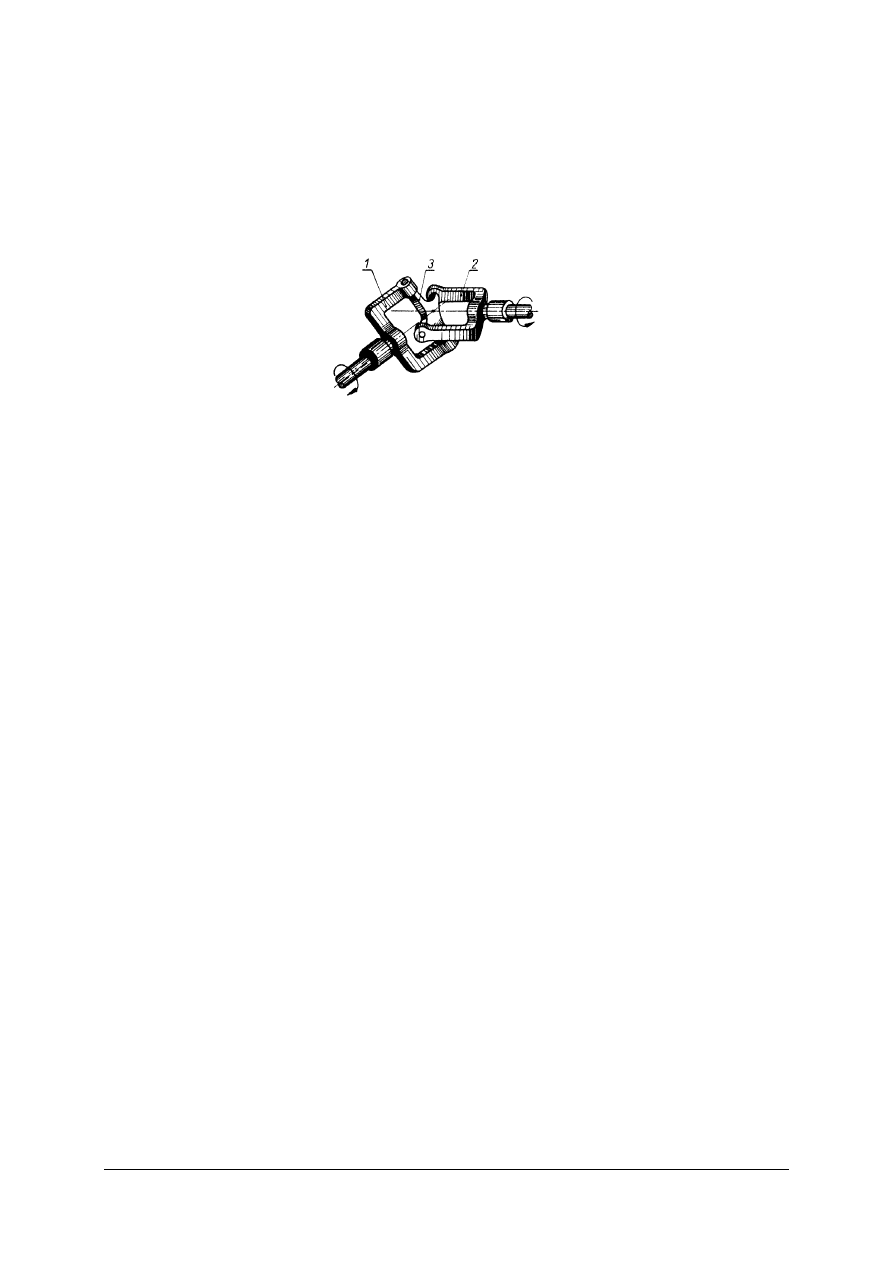
Specjalną grupę sprzęgieł samonastawnych stanowią sprzęgła przegubowe (Cardana),
stosowane do łączenia wałów o kącie między osiami dochodzącym do 40°.
Sprzęgło składa się z dwóch par widełek (1 i 2) osadzonych na końcach wałów oraz
krzyżaka (3). Połączenie takie zapewnia możliwość przenoszenia ruchu obrotowego przez
wały ustawione względem siebie pod pewnym kątem. Dwa takie zespoły połączone krótkim
wałkiem mogą służyć do łączenia wałów o osiach równoległych przesuniętych.
Rys. 49. Sprzęgła przegubowe (Cardana – czytaj Kardana) [5, s. 72]
Sprzęgła podatne
W sprzęgłach podatnych podstawowym elementem jest łącznik podatny sprężyny,
którego zadaniem jest umożliwienie chwilowego względnego obrotu wału napędzanego
w stosunku do wału napędzającego. Dzięki podatności łącznika sprzęgła mogą zmniejszać
wpływ obciążeń dynamicznych na pracę napędu (np. podczas rozruchu), łagodzić drgania
zmniejszać nierównomierności przenoszonego momentu obrotowego, itd.
W sprzęgłach podatnych łączniki wykonuje się najczęściej z gumy lub w sprzęgłach
całkowicie metalowych – ze sprężyn najrozmaitszych kształtów.
Sprzęgła sterowane
Sprzęgłami sterowanymi nazywa się sprzęgła wyposażone w urządzenia za pomocą,
których pracownik obsługujący urządzenie może dokonywać połączenia lub rozłączenia
członów sprzęgła. W zależności od charakteru pracy łączenie lub rozłączanie sprzęgła może
następować w czasie spoczynku albo w ruchu, przy czym o konstrukcji sprzęgła może
również decydować kierunek momentu i ruchu obrotowego przy włączaniu oraz warunki
wyłączania: przy biegu luzem czy też pod obciążeniem.
Sprzęgła sterowane dzieli się na:
−
sprzęgła przełączalne synchroniczne, w których przełączanie następuje tylko
w przypadku równych lub prawie równych prędkości kątowych członów czynnego
i biernego,
−
sprzęgła przełączalne asynchroniczne (cierne), przekazujące moment obrotowy w wyniku
tarcia, co umożliwia przełączanie przy różnych prędkościach kątowych obu członów.
Sprzęgła cierne
Do włączania napędu podczas ruchu, czyli włączania jednego wału bez zatrzymywania
drugiego, służą sprzęgła cierne, mające szczególnie szerokie zastosowanie w ciągnikach
i samochodach. Sprzęgła cierne przenoszą moment przez siłę tarcia wywołaną dociskiem
powierzchni ciernych. Powierzchnie cierne mogą być płaskie, stożkowe lub walcowe.
Sprzęgło służące do łagodnego włączania napędu, sterowane mechanicznie,
przedstawiono na rysunku 50.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
Rys. 50. Schemat działania sprzęgła zamkniętego: a) sprzęgło w stanie włączonym, b) wyłączenia sprzęgła
1 – koło zamachowe silnika, 2 – tarcza sprzęgłowa, 3 – tarcza dociskowa, 4 – sprężyna, 5 – osłona
sprzęgła, 6 – dźwignia wyłączająca, 7 – wał korbowy silnika; 8 – wał sprzęgłowy skrzyni
przekładniowej [5, s. 71]
Wyłączanie sprzęgła uzyskuje się za pomocą dźwigni (nożny pedał sprzęgłowy), która
naciśnięta w kierunku oznaczonym strzałką powoduje odsunięcie ruchomej tarczy dociskowej
od tarczy sprzęgłowej. Gdy nacisk na dźwignię zostaje przerwany, sprężyny samoczynnie
włączają sprzęgło. Zwalniać dźwignię należy powoli, żeby nie spowodować uszkodzenia
sprzęgła.
W praktyce buduje się sprzęgła cierne zamknięte i otwarte. Wyżej opisane sprzęgło jest
sprzęgłem typu zamkniętego. Sprzęgła takie są zawsze dociśnięte sprężynami, czyli są
„zamknięte”. Dla wyłączenia napędu konieczne jest naciśnięcie pedału.
Sprzęgła samoczynne
Sprzęgła samoczynne umożliwiają łączenie lub rozłączanie członów bez interwencji
obsługującego, tzn. wyłącznie wskutek zmian zadanych parametrów pracy. Najczęściej
wykorzystuje się siły bezwładności (zwłaszcza siły odśrodkowej), zmianę kierunku ruchu
obrotowego lub zmianę momentu obrotowego.
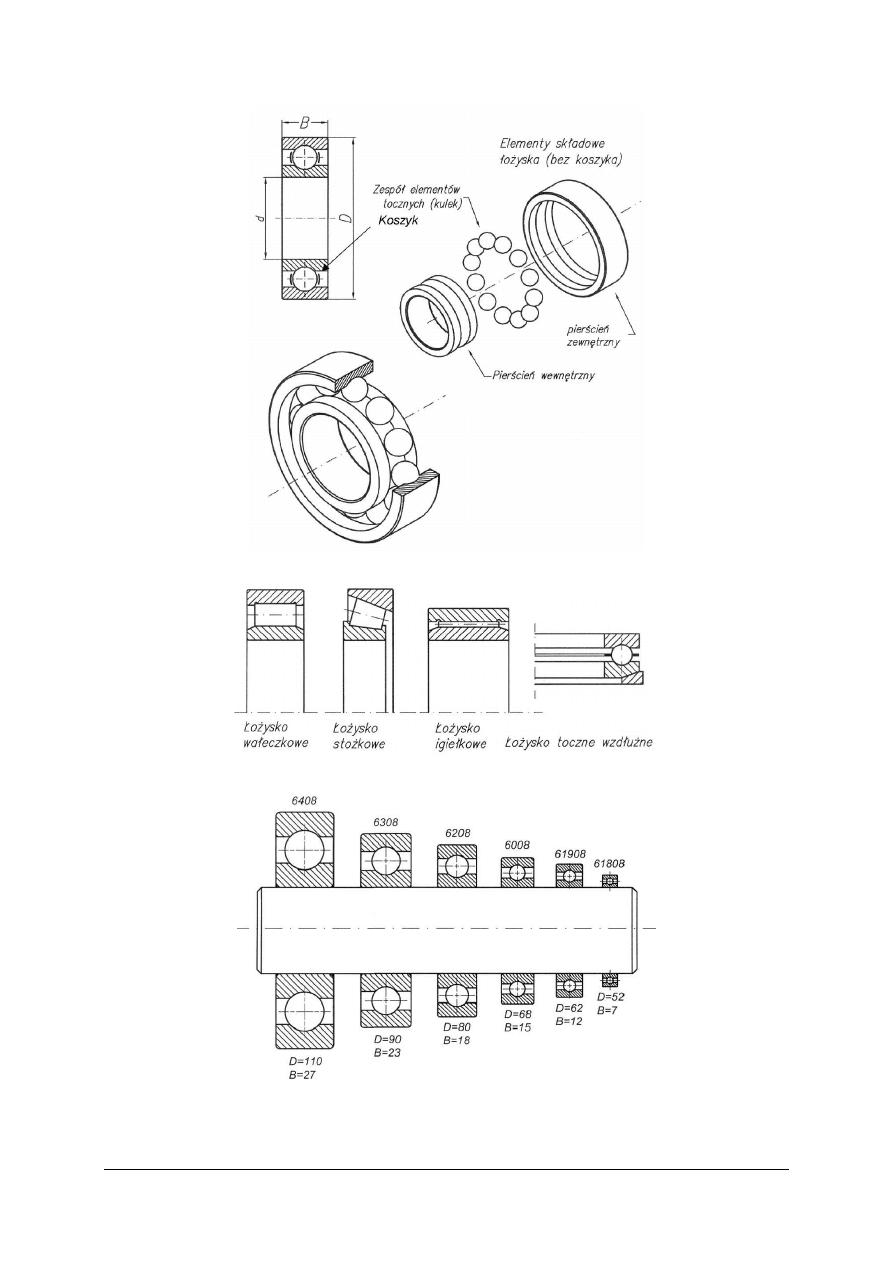
Łożyska służą do podtrzymywania wałków i osi w pozycji umożliwiający ich obracanie
się ze stosunkowo małymi oporami. Ze względu na budowę łożyska można podzielić na:
−
ślizgowe (rys. 51 a i b),
−
toczne.(rys. 52 i 53)
Nazwy poszczególnych rodzajów łożysk tocznych wynikają z ich klasyfikacji według
następujących kryteriów:
−
nominalnego kąta działania (promieniowe i osiowe),
−
kształtu części tocznych (kulkowe, walcowe, igiełkowe stożkowe, baryłkowe),
−
możliwości wzajemnego wychylanie się pierścieni (zwykłe, wahliwe i samonastawne),
−
uzupełniających cech konstrukcyjnych, jak np. liczby rzędów części tocznych,
rozmieszczenia bieżni pomocniczych, uszczelek, blaszek ochronnych, kształtu
powierzchni osadczych, itd.
a)
b)
Rys. 51. Łożysko ślizgowe: a) stożkowe, b) kulowe [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Rys. 52. Łożysko toczne kulkowe zwykłe [18]
Rys. 53. Łożyska toczne [18]
Rys. 54. Przykład serii łożysk kulkowych [18]
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
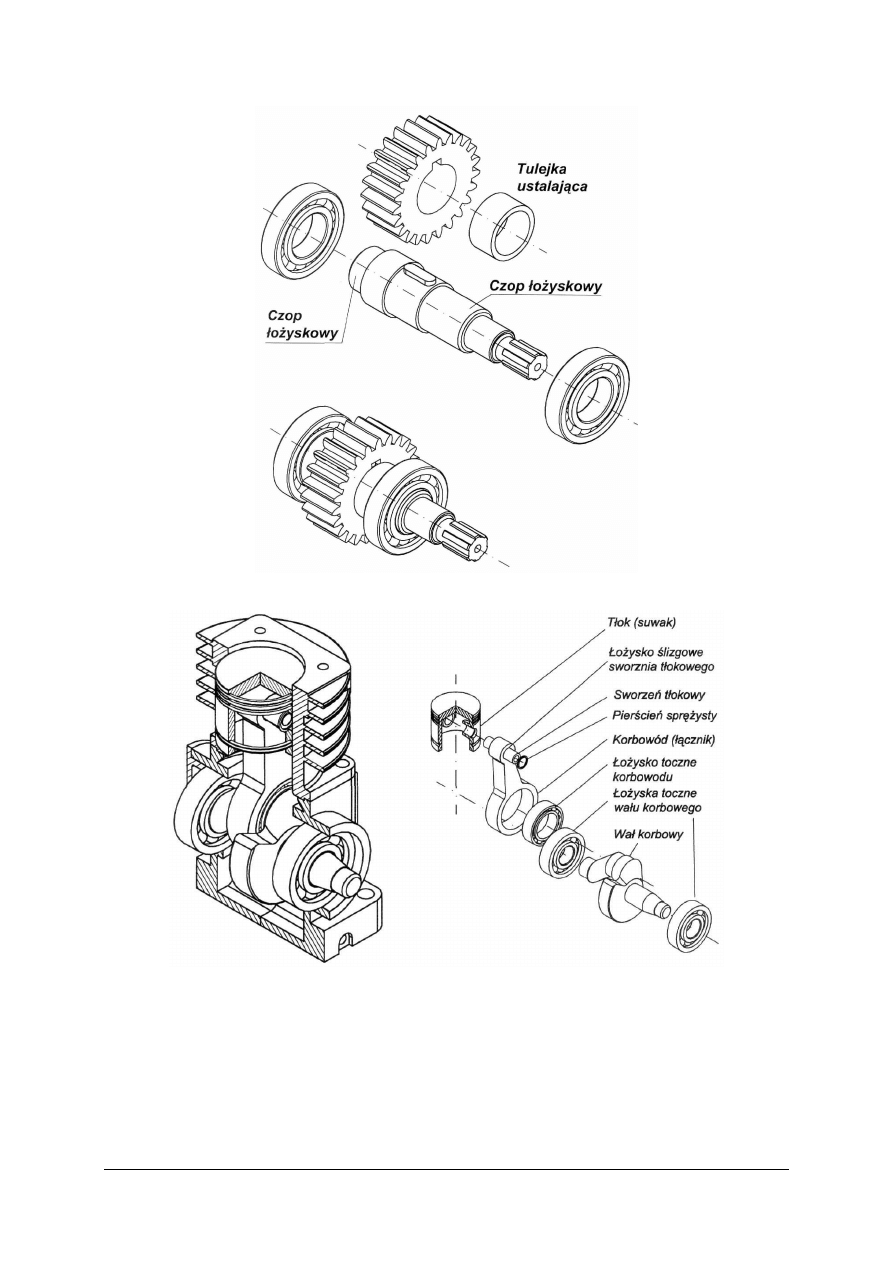
Rys. 55. Łożyskowanie wałka z kołem zębatym [18]
Rys. 56. Łożyskowanie członów ruchomych sprężarki [18]
Hamulcem nazywamy urządzenie służące do zatrzymywania, zwalniania lub regulacji
prędkości obracających się części maszyn. W budowie maszyn stosuje się najczęściej
hamulce cierne. Hamulce te działają na podobnej zasadzie jak sprzęgła cierne, lecz działanie
ich jest odwrotne. Zadaniem sprzęgieł ciernych jest nadanie ruchu obrotowego członowi
biernemu przez cierne sprzęgnięcie go z obracającym się członem czynnym, natomiast
zadaniem hamulców jest zatrzymanie części czynnej hamulca przez sprzęgnięcie jej z częścią
nieruchomą, z reguły związaną z korpusem maszyny.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
Zależnie od rodzaju mechanizmu włączającego i wyłączającego rozróżnia się hamulce
cierne mechaniczne oraz hydrauliczne, pneumatyczne i elektromagnetyczne. Do
podstawowych odmian hamulców ciernych mechanicznych zalicza się hamulce tarczowe–
stożkowe i wielopłytkowe, klockowe (szczękowe) oraz cięgnowe (taśmowe).
Ze względu na charakter pracy hamulce dzieli się na: luzowe i zaciskowe. Hamulce
luzowe są stale zaciśnięte na bębnie hamulcowym (tarczy hamulca) i luzowane przed
uruchomieniem maszyny. Hamulce luzowe są stosowane m.in. w mechanizmach podnoszenia
suwnic oraz jako hamulce bezpieczeństwa w kolejnictwie. Hamulce zaciskowe są stale
swobodne, tzn. części stała i ruchoma są odłączone i współpracują ze sobą tylko w czasie
hamowania. Przykładem hamulców zaciskowych mogą być hamulce nożne w samochodach,
hamulce maszynowe.
W przemyśle maszynowym najczęściej są stosowane hamulce klockowe i cięgnowe.
Rys. 57. Hamulec szczękowo-bębnowy samochodu ciężarowego 1 – bęben hamulca, 2 – piasta koła, 3 – tarcza
hamulcowa, 4 – pokrywa mostu na pędowego, 5 – sworzeń szczęki, 6 – szczęki hamulcowe,
7 – rozpieracz, 8 – sprężyna odciągająca szczęki [8, s. 73]
Przekładnie
Podstawowym zadaniem przekładni mechanicznej jest przeniesienie energii z wału
czynnego na wał bierny, a ponadto dokonanie zmiany wartości momentu obrotowego,
prędkości i sił.
Wielkościami charakteryzującymi przekładnie są: przełożenie i sprawność.
Przełożeniem przekładni i nazywa się stosunek prędkości obrotowej wału napędzającego
do prędkości obrotowej wału napędzanego lub inaczej jest to stosunek prędkości kątowej
wału czynnego
1
ω
do prędkości kątowej wału biernego
ω
2
:
2
1
i
ω
ω
=
2
1
n
n
=
W zależności od wartości przełożenia rozróżniamy następujące rodzaje przekładni:
−
jeżeli
ω
2
<
ω
1
przekładnię nazywa się zmniejszającą (reduktor) (i > 1),
−
jeżeli
ω
2
>
ω
1
zwiększającą (multiplikator) (i < 1).
Sprawnością przekładni η nazywa się stosunek mocy wykorzystywanej na wale biernym
P
2
do mocy doprowadzanej na wale czynnym P
1
:
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
1
2
P
P
=
η
Kolejną wielkością charakterystyczną dla przekładni mechanicznych jest przenoszony
moment obrotowy. Wartość momentu obrotowego na każdym wale i kole oblicza się
z zależności:
ω
=
P
M
gdzie:
M – [N · m],
P – [W],
ω – [rad/s]
lub według wzoru liczbowego:
r
F
n
P
9550
M
⋅
=
⋅
=
gdzie:
M – [N · m],
P – [kW],
n – [obr/min],
F – [N],
r – [m].
W zależności od sposobu przenoszenia ruchu obrotowego rozróżniamy przekładnie:
−−−−
cierne,
−−−−
cięgnowe (a wśród nich pasowe i łańcuchowe),
−−−−
zębate.
Przekładnie mogą być przymusowe (zębate, łańcuchowe) oraz podatne (cierne, pasowe
i linowe). W przekładni przymusowej określony ruch koła napędzającego wywołuje ściśle
określony ruch koła napędzanego, natomiast w przekładni podatnej możliwy jest poślizg
części napędzanej względem części napędzającej. Wszystkie przekładnie dzieli się na proste
(przenoszące ruch między dwoma wałami) i złożone (przenoszące ruch między kilkoma
wałami).
Przekładnie proste zębate
Przekładnie zębate znajdują szerokie zastosowanie i stanowią najliczniejszą i najbardziej
rozpowszechnioną grupę przekładni mechanicznych.
Przekładnią zębatą pojedynczą nazywamy mechanizm utworzony z dwóch kół zębatych,
mogących przenosić ruch obrotowy dzięki wzajemnemu kształtowemu zazębieniu się kół.
Każde koło zębate składa się z wieńca z zębami i z piasty. W większych kołach zębatych
wieniec z piastą jest połączony tarczą lub ramionami. Koła zębate zależnie od kształtu dzieli
się na walcowe i stożkowe. Zęby w płaszczyźnie prostopadłej do osi są ograniczone kołami
wierzchołków o średnicy d
g
i kołem podstaw o średnicy d
f
oraz zarysami bocznymi.
Przestrzenie między zębami nazywa się wrębami międzyzębnymi. Zęby są dzielone przez
wyobrażalne koła podziałowe o średnicy d na dwie części: głowę o wysokości h
g
i stopę
o wysokości h
f
.
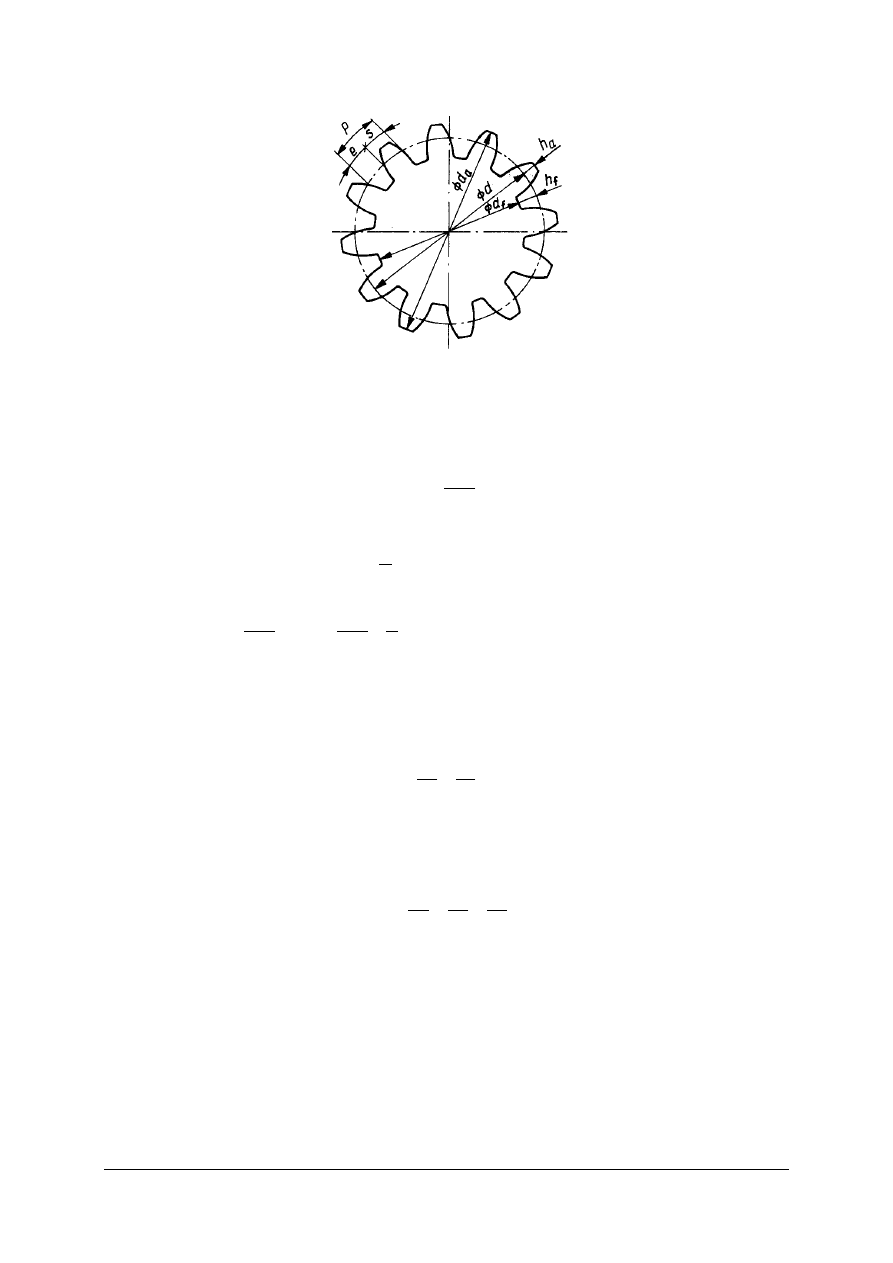
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
Rys. 58. Uzębienie pojedynczego koła [14, s. 263]
Odległość między dwoma jednoimiennymi zarysami zębów, mierzona po łuku koła
podziałowego, nazywa się podziałką nominalną P. Składa się na nią grubość zęba
s i szerokość wrębu e. Wartość podziałki wynosi:
z
d
P
⋅
π
=
Do obliczania charakterystycznych wielkości zęba nie używa się podziałki P uzębienia,
lecz wielkości zwanej modułem
π
=
P
m
podawanym w milimetrach, np.: 1,25; 1,5; 2,75; 4; 5,
itd.
Ponieważ
z
d
P
⋅
π
=
to
z
d
z
d
m
=
π
⋅
⋅
π
=
.
Znając wartość modułu, można obliczyć wszystkie główne wymiary koła zębatego.
Dla dwóch zazębiających się kół można napisać następujące związki:
1
1
z
m
d
⋅
=
oraz
2
2
z
m
d
⋅
=
, a po ich podzieleniu stronami otrzymuje się:
1
2
1
2
z
z
d
d
=
Należy pamiętać, że koła zębate muszą być tak ustawione, żeby koła podziałowe były do
siebie styczne. Koła podziałowe są wobec tego jakby kołami ciernymi, w związku z tym,
otrzymuje się:
1
2
1
2
2
1
z
z
d
d
n
n
i
=
=
=
Indeks
1
odnosi się zawsze do elementu czynnego (napędzającego), a indeks
2
– do
elementu biernego (napędzanego).
Kierunek obrotu wału napędzanego w przekładni zębatej jest przeciwny kierunkowi
obrotów wału napędzającego w przypadku dwóch kół. Jeżeli między koła zębate wałów
współpracujących wprowadzimy trzecie koło zębate pośrednie, to kierunek obrotu wału
napędzanego będzie zgodny z kierunkiem obrotu wału napędzającego, przy czym koło
pośrednie nie ma wpływu na wartość przełożenia przekładni (rys. 59).
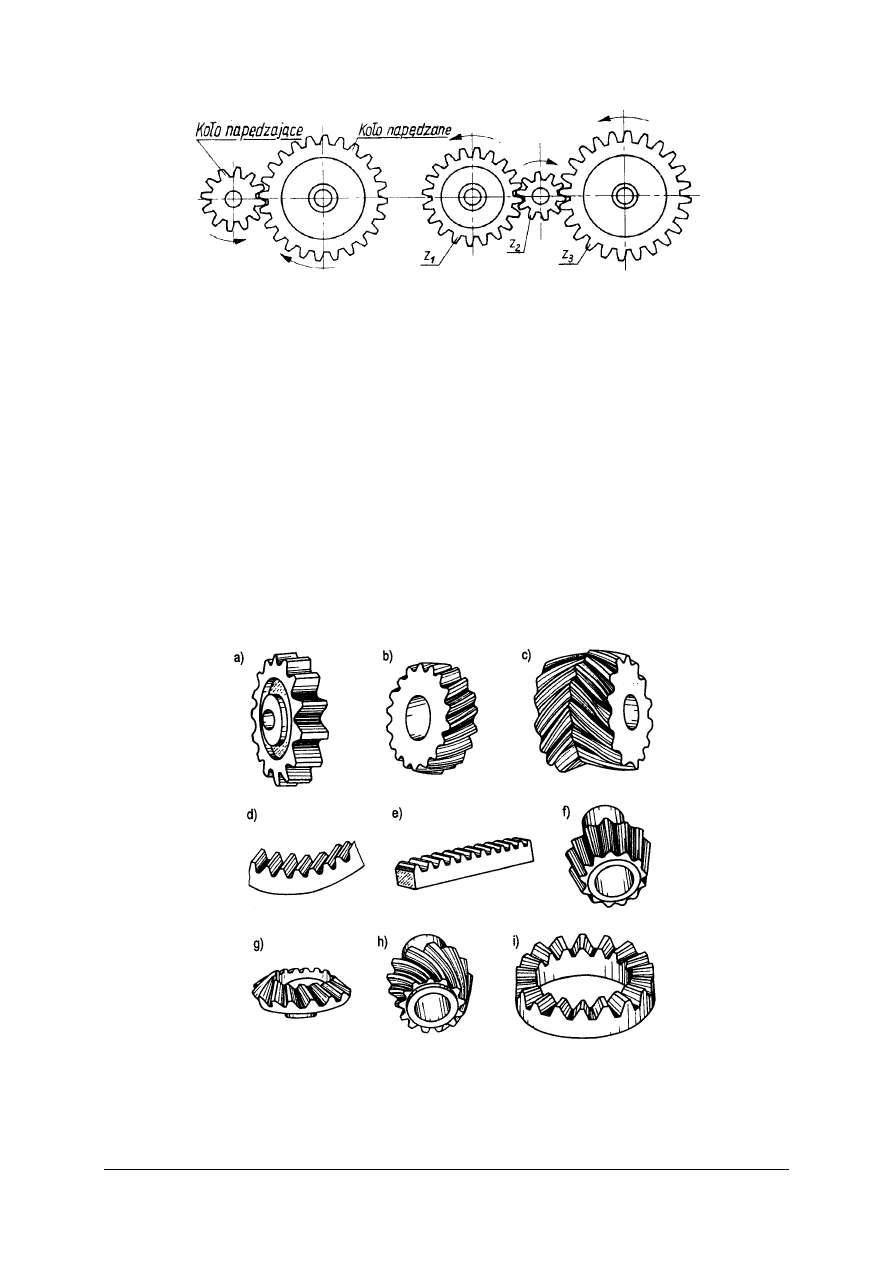
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Rys. 59. Kierunki obrotów kół zębatych [5, s. 88]
W przekładni zębatej koła walcowe wykonuje się:
−−−−
o zębach prostych, uzębienie jest w nich nacięte równolegle do osi koła (rys. 60a),
−−−−
o zębach daszkowych, na szerokości koła uzębienie składa się z odcinków z zębami
skośnymi (lub śrubowymi) lewymi i prawymi (rys. 60c),
−−−−
z uzębieniem wewnętrznym, uzębienie proste lub skośne jest tu nacięte na wewnętrznej
powierzchni walca (rys. 60d),
−−−−
zębatka, stanowi ona wycinek koła walcowego o nieskończenie dużej średnicy, w wyniku
czego okrąg tego koła jest linią prostą (rys. 60e).
Do przenoszenia napędu przy osiach przekładni przecinających się są stosowane koła
zębate stożkowe:
−−−−
o zębach prostych (rys. 60f ) – uzębienie jest nacięte wzdłuż tworzącej stożka,
−−−−
o zębach skośnych (rys. 60g) – uzębienie jest nacięte pod kątem do tworzącej stożka,
−−−−
o zębach krzywoliniowych (rys. 60h) – linie nie są liniami prostymi,
−−−−
płaskie (rys. 60i) – kąt stożka podziałowego wynosi 90° (dawniej nazywano to koło
zębatką pierścieniową lub koronową).
Rys. 60. Rodzaje kół zębatych: a) walcowe o zębach prostych, b) walcowe o zębach skośnych, c) walcowe
o zębach daszkowych, d) walcowe z uzębieniem wewnętrznym, e) zębatka, f) stożkowe o zębach
prostych, g) stożkowe o zębach skośnych, h) stożkowe o zębach krzywoliniowych, i) stożkowe płaskie
[5, s. 100]
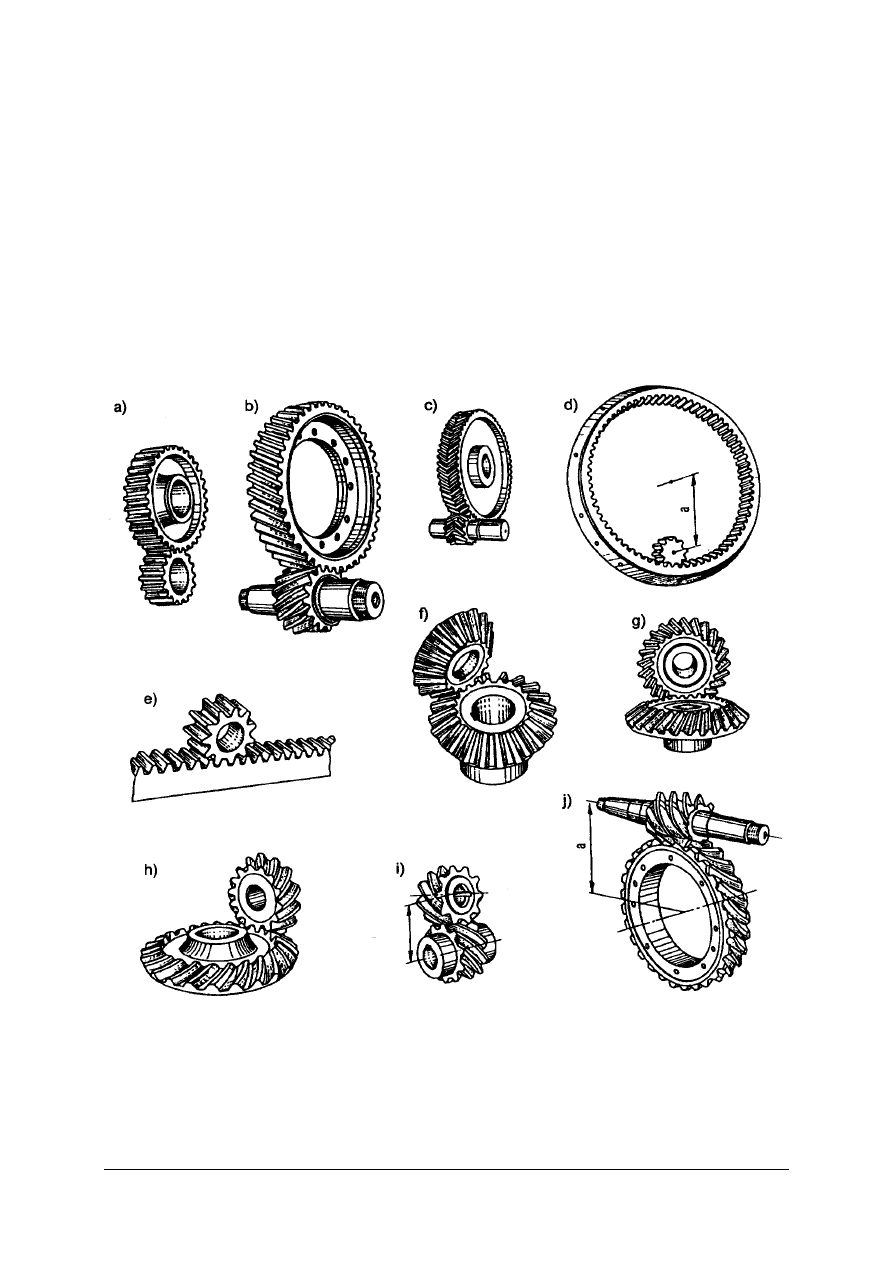
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
Przekładnie proste zależnie od wzajemnego położenia osi wałów napędzającego
i napędzanego dzieli się na: równoległe, gdy osie wałów współpracujących są równoległe;
kątowe, gdy osie wałów przecinają się; wichrowate, gdy osie wałów nie są równoległe i nie
przecinają się.
Ponadto przekładnie zębate (rys. 61) dzielimy na:
−−−−
walcowe o zazębieniu zewnętrznym, składające się z kół walcowych o zębach prostych
skośnych i daszkowych (rys. 61 b, c),
−−−−
zębatkowe (rys. 61e),
−−−−
o zazębieniu wewnętrznym (rys. 61d),
−−−−
stożkowe, składające się z kół stożkowych o zębach prostych (rys. 61f),
−−−−
skośnych (rys. 61g) lub krzywoliniowych (rys. 61h),
−−−−
śrubowe (rys. 61i) i ślimakowe (rys. 61j).
Rys. 61. Przekładnie zębate pojedyncze: a), b), c) walcowa o zazębieniu zewnętrznym z zębami prostymi,
skośnymi, daszkowymi, d) o zazębieniu wewnętrznym, e) zębatkowe, f, g, h) stożkowe o zębach
prostych, skośnych, krzywoliniowych, i) śrubowe, j) ślimakowe [5, s. 100]
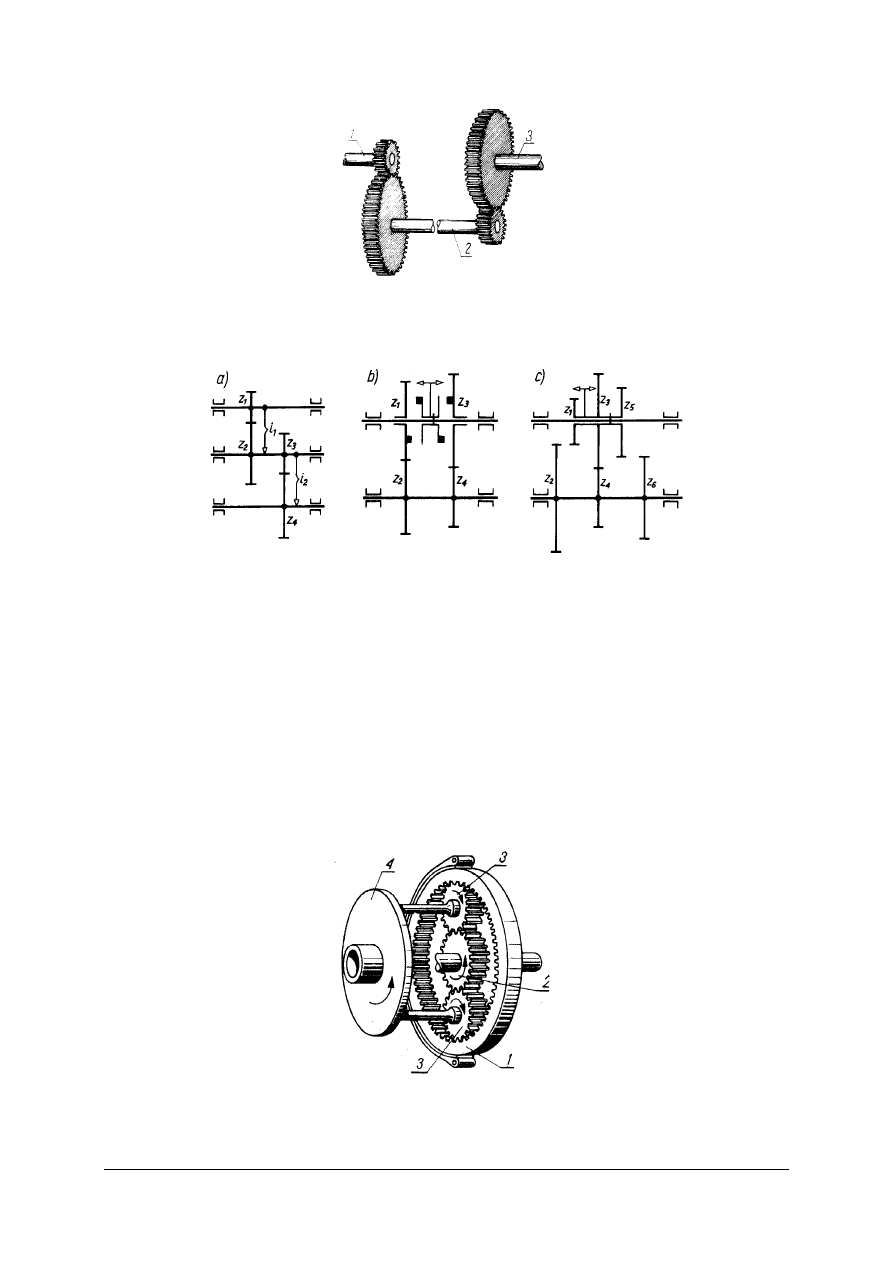
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Rys. 62. Podwójna przekładnia zębata: 1 – wał napędzający, 2 – wał pośredni, 3 – wał napędzany [5, s. 89]
Przekładnie wielorzędowe są stosowane głównie w obrabiarkach, w których jest
niezbędne otrzymywanie na wrzecionie roboczym różnych prędkości obrotowych.
Rys. 63. Przekładnie złożone: a) wielostopniowa, b, c) wielorzędowe [14, s. 261]
Przekładnia obiegowa
We wszystkich powyższych przekładniach osie kół były stałe i dlatego przekładnie te
można nazwać przekładniami stałymi. Odróżnia się od nich tzw. przekładnie obiegowe
(planetarne), w których osie niektórych kół, zwanych obiegowymi lub satelitami, obracają się
dookoła osi innych kół.
Mechanizm przekładni planetarnej przedstawiony jest na rysunku 64. Składa się on
z dwóch współśrodkowych kół zębatych: pierścieniowego (l) i środkowego (słonecznego) (2)
oraz zazębionych z nimi kół obiegowych (3). Osie kół obiegowych osadzone są we wspólnym
jarzmie (4). Koła obiegowe mogą się obracać dookoła osi koła słonecznego. Jeżeli zatrzyma
się koło słoneczne podczas obrotu koła pierścieniowego, to satelity będą się obracać dookoła
swoich osi.
Rys. 64. Mechanizm przekładni obiegowej: 1 – koło pierścieniowe, 2 – koło słoneczne, 3 – koła obiegowe,
4 – jarzmo [5, s. 90]

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
W tym więc czasie będą one usiłowały obrócić nieruchome koło słoneczne, ale
napotykając opór, będą musiały toczyć się po jego obwodzie. Przekładnie planetarne mogą
mieć bardzo małe przełożenia, czyli znacznie zmniejszać prędkość obrotową wału
napędzanego.
Przekładnia cierna
Przekładnia mechaniczna, w której dwa poruszające się elementy (najczęściej wirujące)
dociskane są do siebie tak by powstało pomiędzy nimi połączenie cierne. Siła tarcia
powstająca pomiędzy elementami odpowiedzialna jest za przeniesienie napędu.
Przekładnia cięgnowa
Przekładnia mechaniczna, w której fizyczny kontakt pomiędzy członem napędzającym
i napędzanym odbywa się za pośrednictwem cięgna. Dzięki temu człony przekładni mogą być
oddalone od siebie nawet na duże odległości. Pozwala to także zastosowanie bardziej
swobodnej geometrii przekładni:
−−−−
przekładnie pasowe,
−−−−
przekładnie linowe,
−−−−
przekładnie łańcuchowe.
Rys. 65. Przekładnia pasowa [18]
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do wykonania ćwiczeń.
1. Jaka jest różnica między wałem a osią?
2. Czym różnią się łożyska toczne od ślizgowych?
3. Jakie elementy toczne stosuje się w łożyskach?
4. Do czego służą sprzęgła?
5. Które ze sprzęgieł zaliczamy do stałych a które do wyłączalnych?
6. Jak działają sprzęgła jednokierunkowe?
7. Co to jest przełożenie kinematyczne przekładni?
8. Jak dzielimy przekładnie mechaniczne?
9. Jakie rodzaje hamulców stosuje się w maszynach?
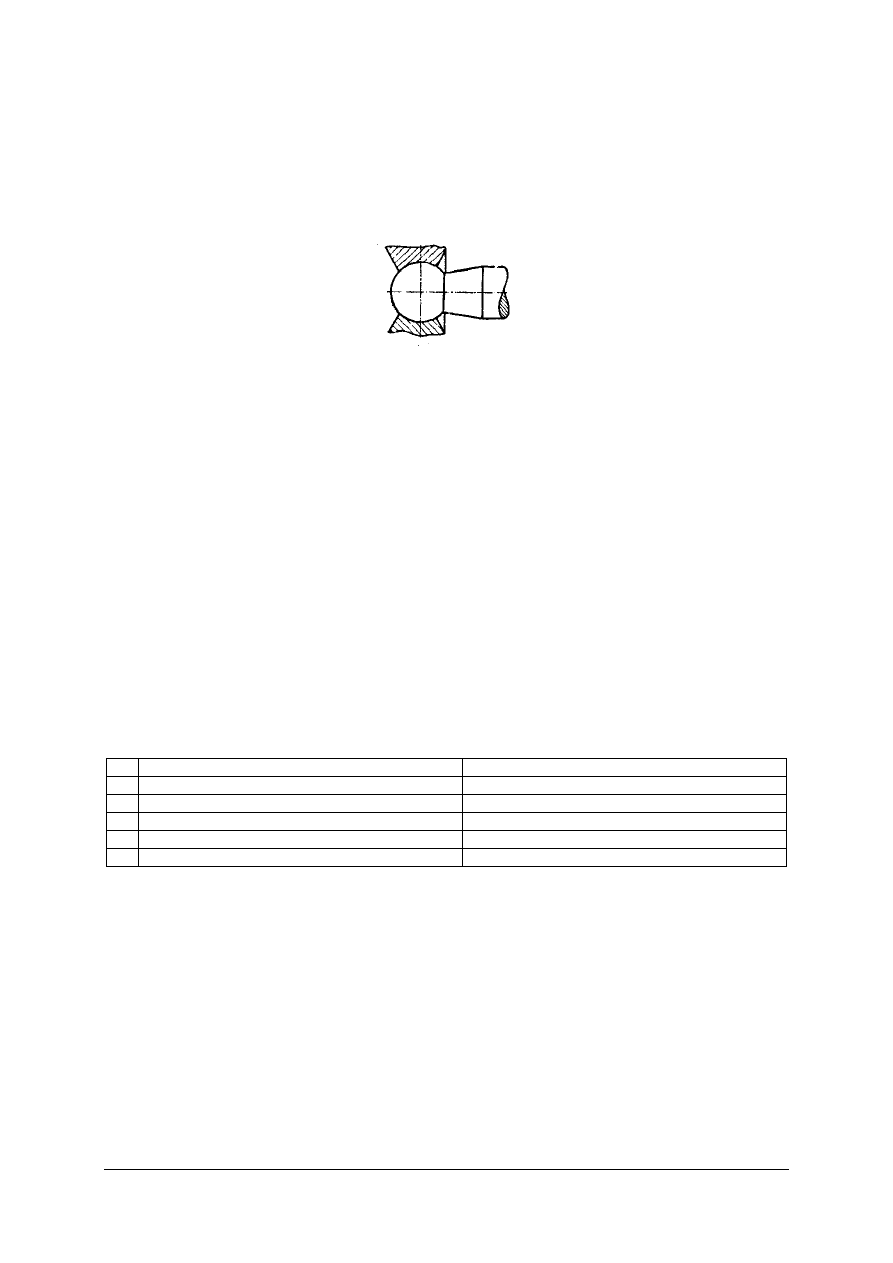
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
4.3.3. Ćwiczenia
Ćwiczenie 1
Na rysunku przedstawiono osadzanie czopa w łożysku ślizgowym. Przeanalizuj sposób
ułożyskowania czopa i zakwalifikuj go do odpowiedniej grupy.
Rysunek do ćwiczenia 1
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się nad możliwymi kierunkami sił przenoszonych przez ten czop,
3) odszukać w materiałach dydaktycznych informacje na temat czopów,
4) zaklasyfikować czop do odpowiedniej grupy,
5) zapisać wnioski i wynik,
6) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
–
kartka papieru, długopis,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 2
Na podstawie dokumentacji techniczno-ruchowej urządzenia określ, jakie zastosowano
w nim elementy maszyn.
Mechanizmy
Rodzaj i krótki opis
1
Łożyska
2
Sprzęgła
3
Hamulce
4
Przekładnie mechaniczne
5
Inne mechanizmy
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) przeanalizować dokumentację techniczną urządzenia,
2) określić rodzaje zastosowanych połączeń i mechanizmów,
3) zapisać wyniki analizy konstrukcji urządzenia w tabeli,
4) przedstawić wyniki ćwiczenia.
Wyposażenie stanowiska pracy:
–
dokumentacja techniczo-ruchowa urządzenia,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
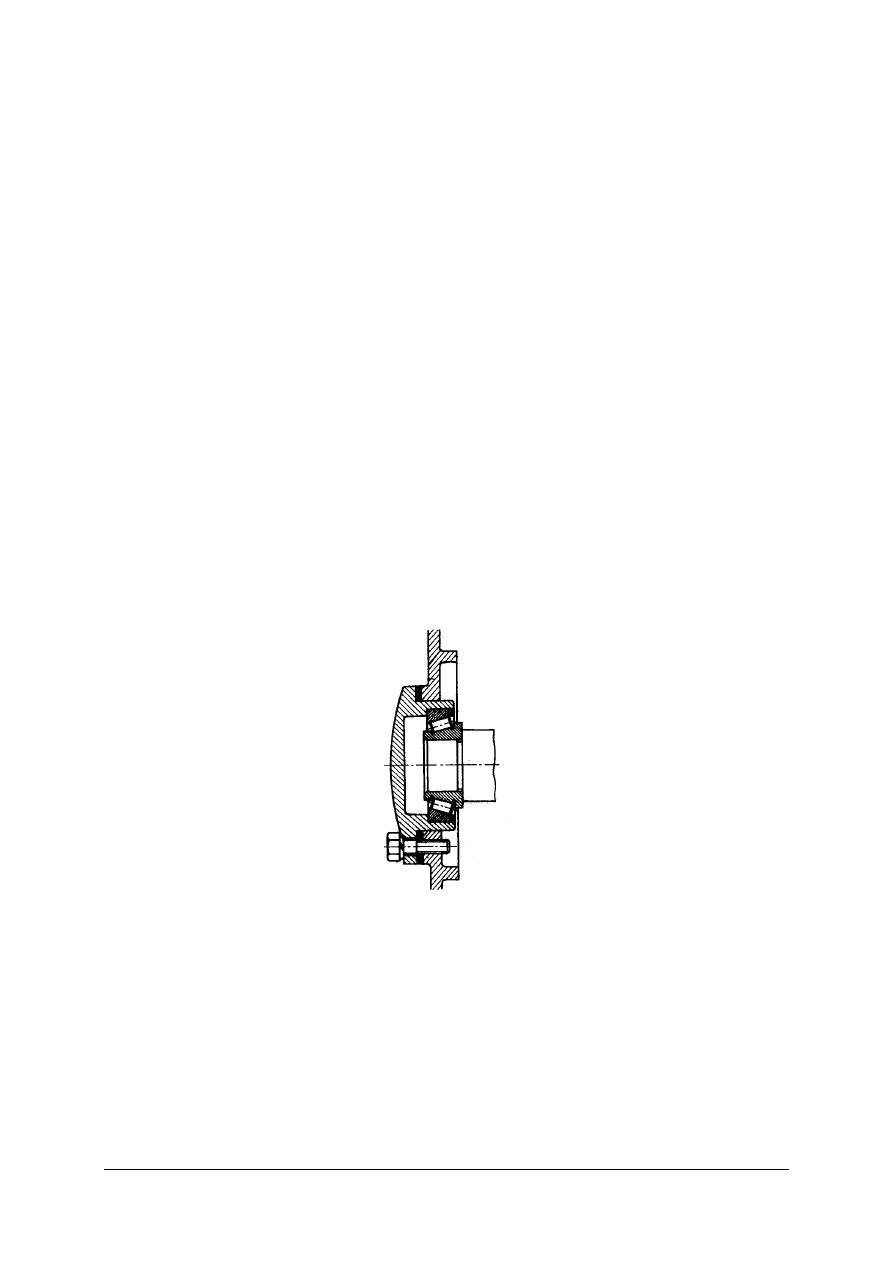
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
Ćwiczenie 3
Korzystając z Katalogu Łożysk Tocznych dobierz łożysko kulkowe zwykłe o wymiarach:
−
D = 47 mm (średnica zewnętrzna łożyska),
−
d = 25 mm (średnica wewnętrzna łożyska),
−
B = 12 mm (szerokość łożyska).
Określ jego trwałość i nośność.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) odszukać w katalogu łożysko kulkowe zwykłe o podanych wymiarach,
3) zapisać oznaczenie łożyska, a także jego zdolność do trwałego przenoszenia obciążeń
oraz wartość obciążenia.
4) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
–
Katalog Łożysk Tocznych,
–
kartka papieru, długopis,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 4
Podaj rodzaj użytego łożyska przedstawionego na rysunku i zakwalifikuj je do
odpowiedniej grupy oraz wyjaśnij sposób jego osadzenia i pasowania.
Rysunek do ćwiczenia 4 [6, s. 219]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się nad przyczyną zastosowania tego rodzaju łożyska,
3) odszukać w materiałach dydaktycznym informacje na temat wałów i łożysk,
4) zaklasyfikować łożysko do odpowiedniej grupy,
5) określić części maszyn osadzone na wale, które są przyczyną zastosowania tego typu
łożyska,
6) określić sposób pasowania łożyska,
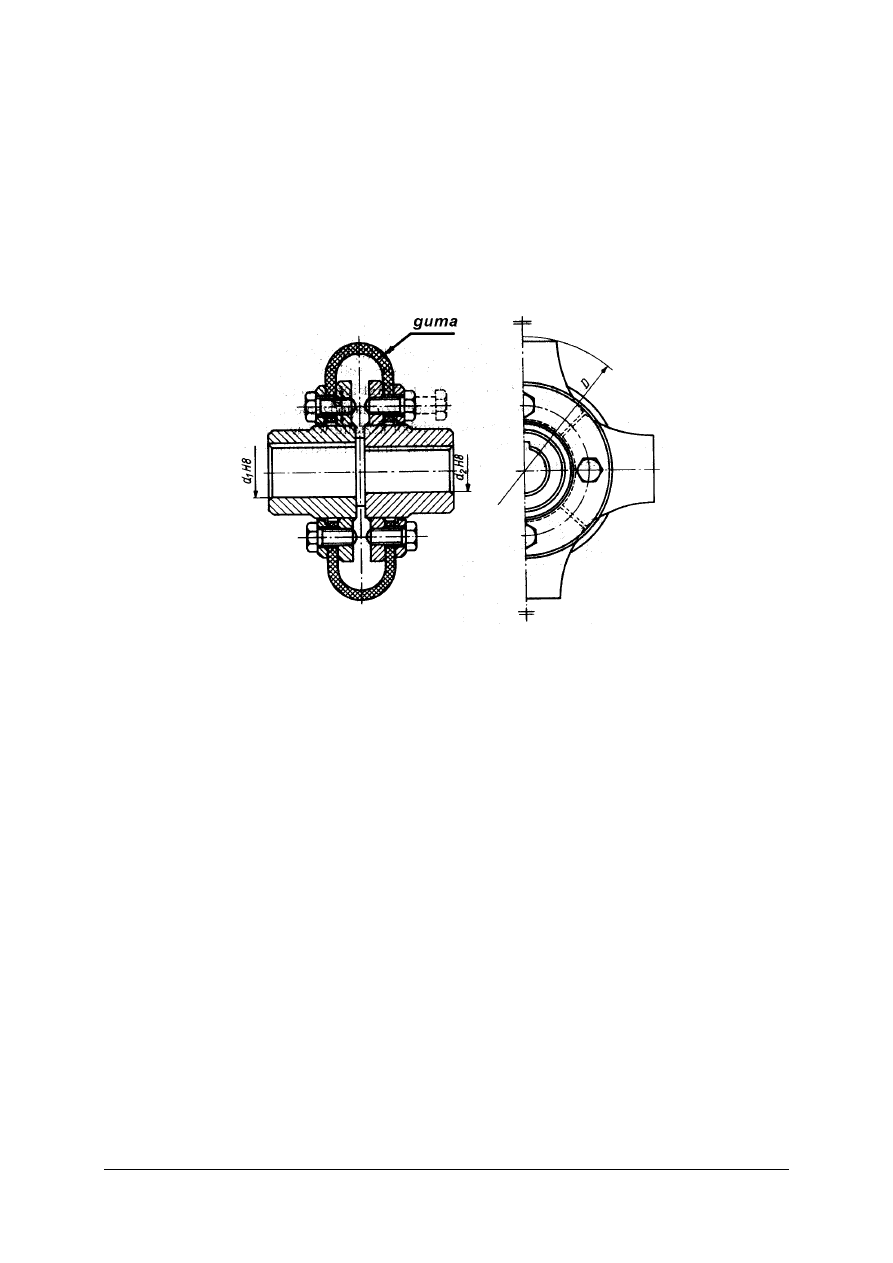
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
7) zapisać wnioski i wyniki,
8) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
–
kartka papieru , długopis,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 5
Rozpoznaj sprzęgło przedstawione na rysunku i określ miejsca jego zastosowania.
Rysunek do ćwiczenia 5 [14, s. 379]
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) zastanowić się jakie są cechy charakterystyczne sprzęgieł w obrębie poszczególnych
grup,
3) odszukać w materiałach dydaktycznych informacje dotyczące sprzęgieł,
5) zaklasyfikować przedstawione powyżej sprzęgło do odpowiedniej grupy,
6) przeprowadzić porównanie,
7) uzasadnić swój wybór,
8) zapisać wnioski,
5) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
–
kartka papieru, długopis,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
Ćwiczenie 6
Dobierz koło zębate o odpowiedniej liczbie zębów, tak aby wał napędzany obracał się
z prędkością 500 obr/min oraz oblicz jej przełożenie jeśli wał napędzający obraca się
z prędkością obrotową 1400 obr/min a na wale jest osadzone koło zębate o liczbie zębów
z = 40.
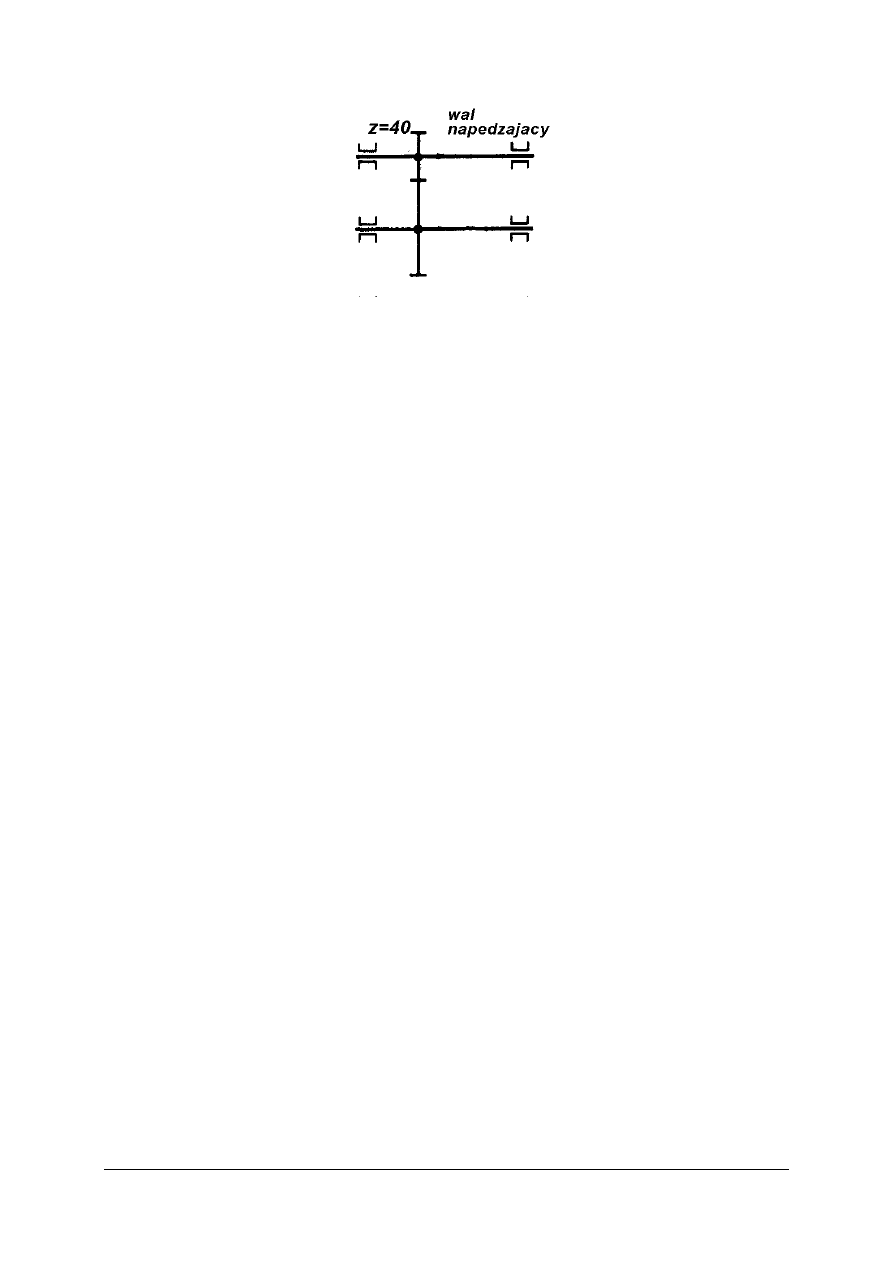
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
Rysunek do ćwiczenia 6
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią zadania,
2) odszukać w materiałach dydaktycznych wzór na przełożenie przekładni prostej
pamiętając, że indeks 1 odnosi się do elementu napędzającego,
3) obliczyć przełożenie przekładni,
4) obliczyć liczę zębów drugiego koła zębatego,
5) zaprezentować efekty pracy.
Wyposażenie stanowiska pracy:
–
kartka papieru, długopis,
–
literatura zgodna z punktem 6 Poradnika dla ucznia.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) scharakteryzować budowę łożysk tocznych?
2) scharakteryzować budowę hamulców?
3) sklasyfikować sprzęgła?
4) określić zadania przekładni mechanicznych?
5) sklasyfikować przekładnie mechaniczne?
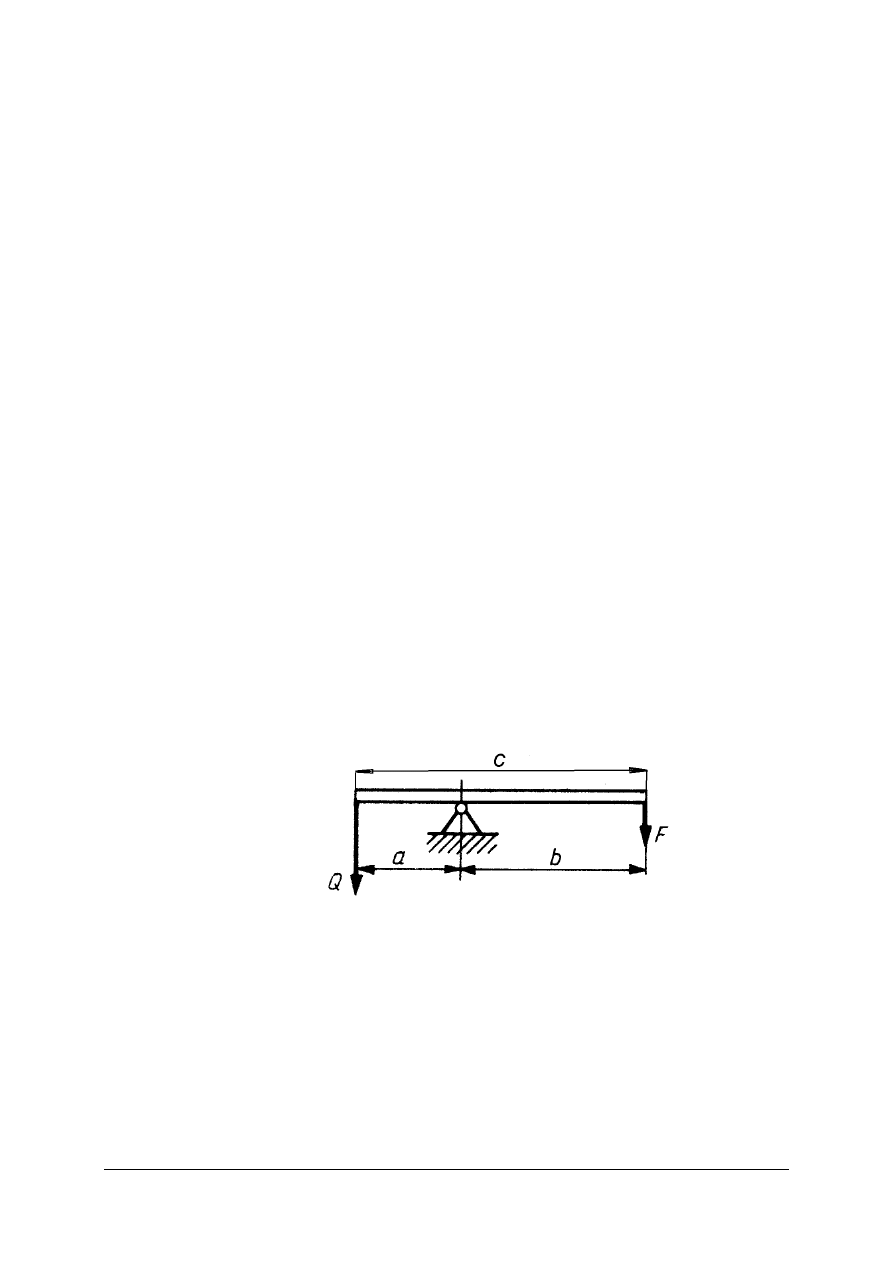
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadań o różnym stopniu trudności. Wszystkie zadania są zadaniami
wielokrotnego wyboru i tylko jedna odpowiedź jest prawidłowa.
5. Udzielaj odpowiedzi tylko na załączonej karcie odpowiedzi – zaznacz prawidłową
odpowiedź znakiem X (w przypadku pomyłki należy błędną odpowiedź zaznaczyć
kółkiem, a następnie ponownie zakreślić odpowiedź prawidłową).
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Kiedy udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego
rozwiązanie na później i wróć do niego, gdy zostanie Ci czas wolny. Trudności mogą
przysporzyć Ci zadania: 16–20, gdyż są one na poziomie trudniejszym niż pozostałe.
Przeznacz na ich rozwiązanie więcej czasu.
8. Czas trwania testu – 30 minut.
9. Maksymalna liczba punktów, jaką można osiągnąć za poprawne rozwiązanie testu
wynosi 20.
Powodzenia!
ZESTAW ZADAŃ TESTOWYCH
1. Parą sił jest układ dwóch sił, które mają
a) różną wartość, jednakowe kierunki działania, zwroty przeciwne.
b) równą wartość, jednakowe kierunki działania, zwroty zgodne.
c) równa wartość, jednakowe kierunki działania, zwroty przeciwne.
d) równa wartość, przeciwne kierunki działania, zwroty przeciwne.
2. Na rysunku przedstawiono dźwignię dwuramienną, stan równowagi momentów dźwigni
wynosi
a) F · c – Q · a = 0.
b) F · a – Q · b = 0.
c) F · c – Q · c = 0.
d) F· b – Q · a = 0.
3. Odkształceniem plastycznym nazywamy
a) zmianę kształtu ciała pod wpływem działającego obciążenia, bez powrotu tego ciała
do poprzedniej postaci po ustąpieniu tego obciążenia.
b) zmianę kształtu i wymiarów ciała z powrotem do poprzedniej postaci, po ustąpieniu
obciążenia.
c) odkształcenie, przy którym obowiązuje prawo Hooke’a.
d) odkształcenie przy którym występuje tylko naprężenie normalne.
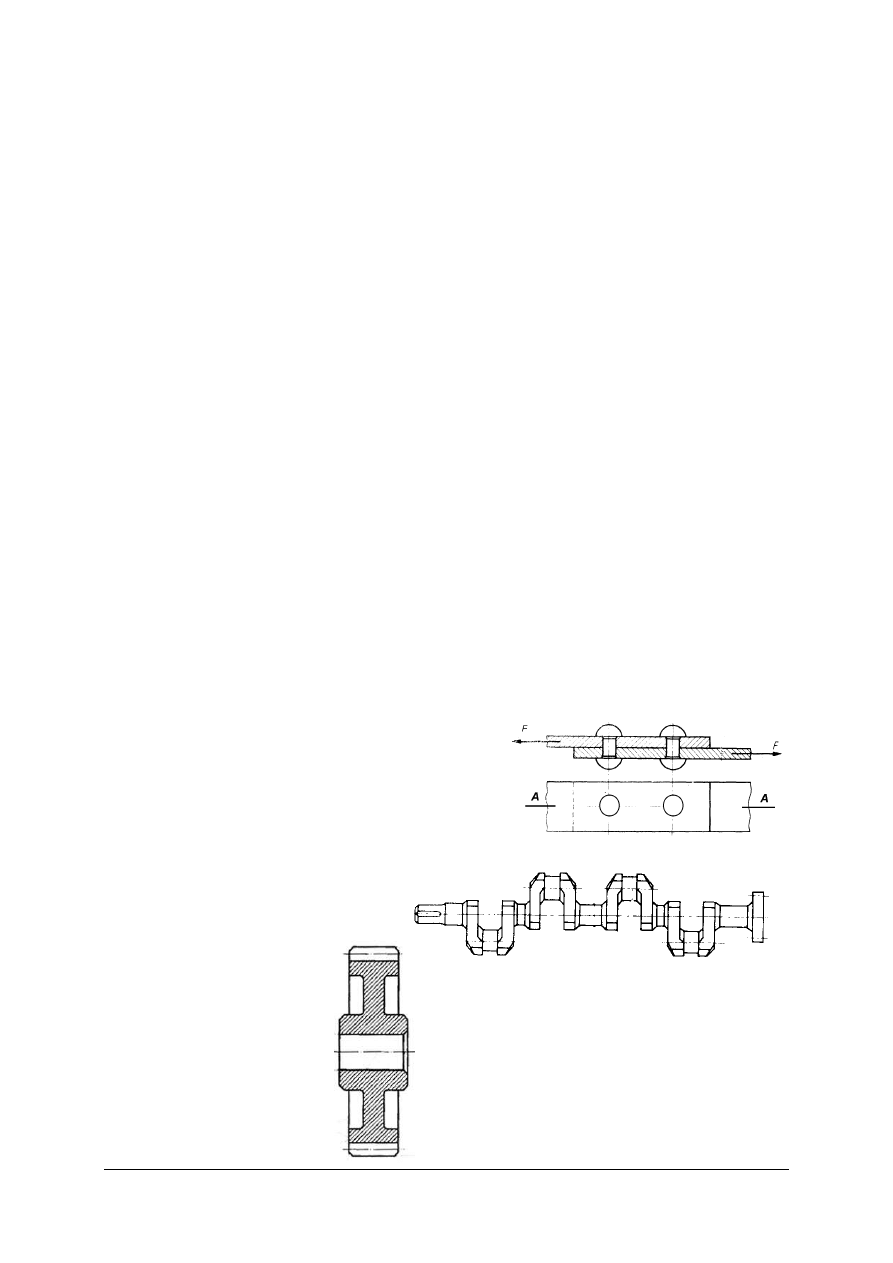
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
56
4. Wielkość pracy w czasie, w jakim ta praca została wykonana to
a) siła.
b) moc.
c) energia.
d) sprawność.
5. Sprężystość to
a) największa granica oporu stawianego przez materię, po przekroczeniu której
następuje zniszczenie materiału.
b) zdolność ciała do trwałych odkształceń tzn. takich, które nie znikają po usunięciu
ciała.
c) zdolność ciała do odzyskania pierwotnego kształtu po usunięciu obciążenia.
d) właściwość ciała, która powoduje brak zjawiska odkształcania pomimo działających
obciążeń.
6. Liczbę określającą ile razy naprężenie dopuszczalne powinno być mniejsze od naprężenia
granicznego nazywa się współczynnikiem
a) mocy.
b) bezpieczeństwa.
c) granicznym.
d) normalnym.
7. Obciążenia działające w sposób stały, to obciążenia
a) dynamiczne.
b) statyczne.
c) zmienne.
d) graniczne.
8. Rysunek przedstawia połączenie nierozłączne. Na elementy w połączeniu działa siła F,
powodując w łącznikach wystąpienie naprężeń
a) ściskających.
b) skręcających.
c) rozciągających.
d) ścinających.
9. Część maszynowa przedstawiona na rysunku to wał
a) korbowy.
b) gładki.
c) schodkowy.
d) giętki.
10. Na rysunku przedstawiono
a) koło zębate.
b) tuleję z rowkiem.
c) koło pasowe.
d) pokrętło zasuwy.
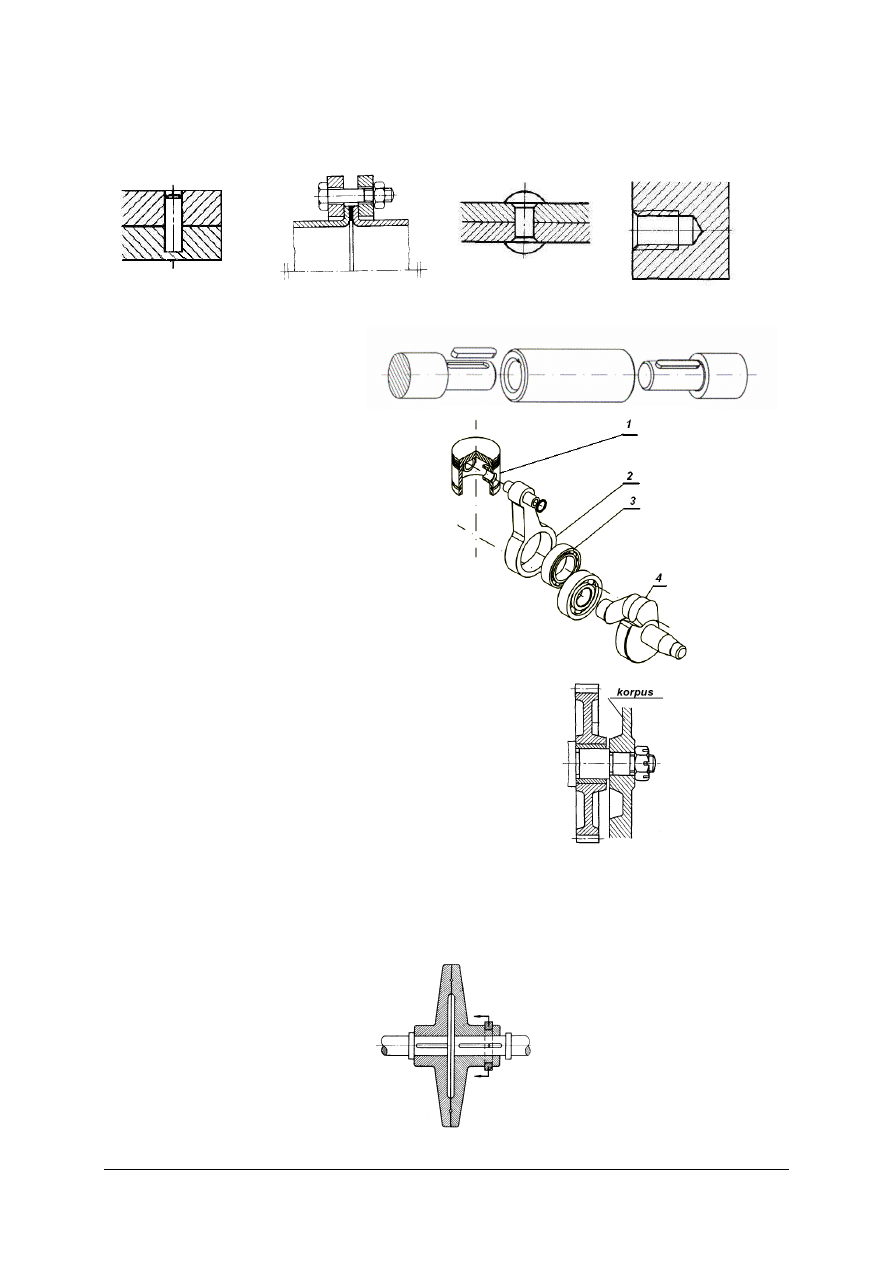
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
57
11. Połączenie gwintowe przedstawiono na rysunku
a)
b)
c)
d)
12. Rysunek przedstawia sprzęgło
a) tulejowe.
b) cierne tarczowe.
c) zębate.
d) kłowe.
13. Korbowód, na rysunku oznaczono cyfrą
a) 1.
b) 2.
c) 3.
d) 4.
14. Na rysunku przedstawiono koło zębate łożyskowanie na
a) wale prostym jednopodporowym.
b) osi ruchomej.
c) osi nieruchomej.
d) wale schodkowym.
15. Urządzenia, które służą do łączenia wałów w celu przeniesienia ruchu obrotowego
z jednego wału na drugi bez zmiany kierunku obrotów tych wałów to
a) przekładnie.
b) mechanizmy śrubowe.
c) hamulce.
d) sprzęgła.
16. Rysunek przedstawia sprzęgło
a) łubkowe.
b) cierne.
c) kłowe.
d) kołnierzowe.
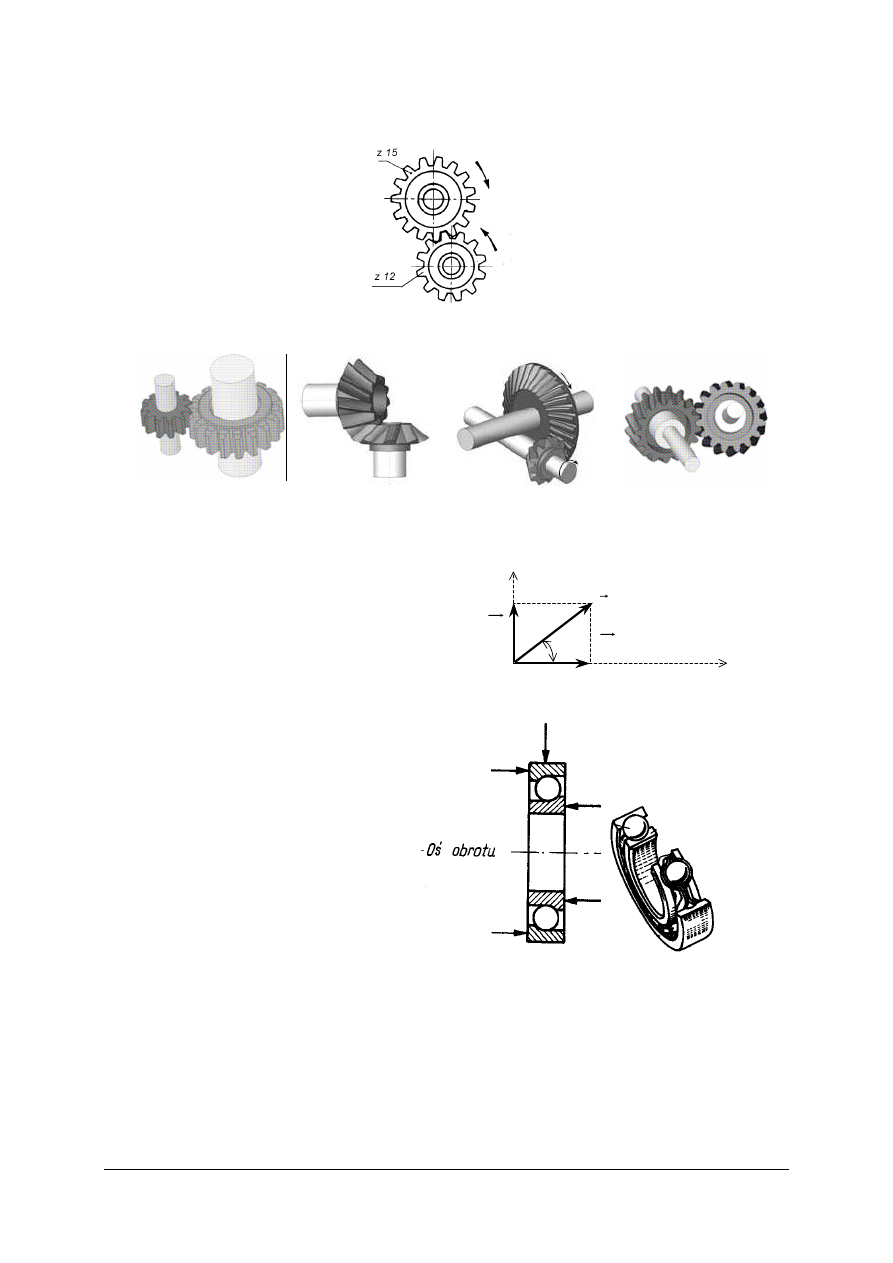
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
58
17. Na rysunku przedstawiono dwa współpracujące koła. Elementem czynnym (kołem
napędzającym) jest koło mniejsze z 12. Przełożenie przekładni wynosi
a) 1,25.
b) 2.
c) 0,75.
d) 0,5.
18. Przekładnię walcową, czołową przedstawiono na rysunku
a)
b)
c)
d)
19. Na rysunku rozłożono siłę na dwie składowe. Wzór pozwalający obliczyć wartości sił
składowych to
a) Fx = F cos α; Fy = F sin α.
b) Fx = F sin α; Fy = F cos α.
c) Fx = F / Fy sin α; Fy = F /Fx cos α.
d) Fx = F / Fy cos α; Fy = F /Fx sin α.
20. Dwa rysunki przedstawiają tę samą część maszynową z zaznaczonymi możliwymi
kierunkami przenoszonych obciążeń. Jest to łożysko toczne
a) kulkowe poprzeczne.
b) kulkowe wzdłużne.
c) kulkowe poprzeczno-wzdłużne.
d) baryłkowe poprzeczne.
α
y
x
F
x
F
y
F
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
59
KARTA ODPOWIEDZI
Imię i nazwisko ................................................................................................
Rozpoznawanie elementów maszyn i mechanizmów
Zakreśl poprawną odpowiedź
Nr
zadania
Odpowiedź
Punkty
1
a
b
c
d
2
a
b
c
d
3
a
b
c
d
4
a
b
c
d
5
a
b
c
d
6
a
b
c
d
7
a
b
c
d
8
a
b
c
d
9
a
b
c
d
10
a
b
c
d
11
a
b
c
d
12
a
b
c
d
13
a
b
c
d
14
a
b
c
d
15
a
b
c
d
16
a
b
c
d
17
a
b
c
d
18
a
b
c
d
19
a
b
c
d
20
a
b
c
d
Razem:

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
60
6. LITERATURA
1. Biały W.: Maszynoznawstwo, WN–T, Warszawa 2003
2. Czerwiński W,: Materiałoznawstwo, WSiP, Warszawa 1977
3. Dobrzański L.: Metaloznawstwo i obróbka cieplna. WSiP, Warszawa 1997
4. Drętkiewicz-Więch J, Technologia mechaniczna techniki wytwarzania, WSiP, Warszawa
2000
5. Fijakowski K. Mac S.: Maszynoznawstwo, WSiP, 1979
6. Godlewski M. Tym Z.: Poradnik dla mechaników, WSiP, Warszawa 1991
7. Górecki A., Grzegórski Z.: Montaż, naprawa i eksploatacja maszyn i urządzeń
przemysłowych. Technologia. WSiP, Warszawa 1998
8. Górecki A.: Technologia ogólna. Podstawy technologii mechanicznych. WSiP,
Warszawa 2005
9. Kozak B, Mechanika techniczna, WSiP, Warszawa 2004
10. Nawrot C, Mizera J, Kurzydłowski K, Wprowadzenie do technologii materiałów dla
projektantów, Oficyna wydawnicza Politechniki Warszawskiej, Warszawa 2006
11. Okoniewski S, Technologia metali, WSiP, Warszawa 1980
12. Orlik Z, Surowiak W, Części maszyn, WSiP, Warszawa 1980
13. Potyński A, Podstawy technologii i konstrukcji mechanicznych, WSiP, Warszawa 1999
14. Rutkowski A.: Części maszyn. WSiP, Warszawa 2007
15. Siuta W.: Mechanika techniczna. WSiP, Warszawa 1992
16. Wielgoławski M.: Nowe blachy w nadwoziu. Auto Moto Serwis 5/2006
17. Zwora J.: Podstawy technologii maszyn. WSiP, Warszawa 2001
18. www.home.agh.edu.pl
Wyszukiwarka
Podobne podstrony:
gornik odkrywkowej eksploatacji zloz 711[03] o1 04 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 04 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 04 n
gornik odkrywkowej eksploatacji zloz 711[03] z3 04 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 01 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 01 n
gornik odkrywkowej eksploatacji zloz 711[03] z2 04 u
gornik odkrywkowej eksploatacji zloz 711[03] z3 04 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 05 u
gornik odkrywkowej eksploatacji zloz 711[03] z1 04 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 06 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 03 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 02 u
gornik odkrywkowej eksploatacji zloz 711[03] o1 03 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 02 n
gornik odkrywkowej eksploatacji zloz 711[03] z2 04 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 05 n
gornik odkrywkowej eksploatacji zloz 711[03] o1 06 u
więcej podobnych podstron