PRZEGLĄD BUDOWLANY
6/2005
36
ZARZĄDZANIE–ORGANIZACJA
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
1. Wprowadzenie
Zagadnienie przedstawione w arty-
kule dotyczy problemów harmo-
nogramowania i jest przedmiotem
badań w wielu ośrodkach. W aktual-
nej literaturze zagranicznej dotyczą-
cej problematyki planowania robót
budowlanych proponowane są
np.: sposoby harmonogramowania
liniowego (LSM – Linear Scheduling
Model), wykresów cyklicznych
(LOB – Line of Balance), oraz pla-
nowanie sieciowe typu CPM/PERT,
z uwzględnieniami szeregu funkcji
celu: najmniejszego kosztu, czasu,
z ograniczonymi zasobami, priory-
tetami robót itp., zarówno w ujęciu
deterministycznym jak i probabi-
listycznym. Harmonogramowanie
procesów ciągłych liniowych przed-
stawiane było w wielu pracach: Arditi
(1986, 1986, 2001, 2002), Hegazy
(1993), Johston (1984), w któ-
rych opisano techniki planowania
graficznego. Rozwiązywane były
zagadnienia synchronizacji proce-
sów budowlanych wykonywane
na działkach (częściach budowli).
Line of Balance (LOB) umożliwiają
powiązanie różnych procesów, które
są wykonywane jako ciągłe na wielu
działkach roboczych. W innych
opracowaniach: Hamerlink (2003),
Hamerlink and Rowings (1998),
Rabhar and Rowings (1992), Harris
and Joannou (1998) proponowa-
ne są nowe sposoby planowa-
nia graficznego. Prezentowane
są rozwiązania wielu zagadnień
szczegółowych: Chrzanowski and
Johnson (1986) oraz wyboru opty-
malnych wariantów organizacyj-
nych z zastosowaniem wielu kryte-
riów: Zavadskas (2000). W artykule
prezentowany jest problem pla-
nowania robót z uwzględnieniem
buforów czasu oraz zachowaniem
ciągłości procesów. Przyjęto mini-
mum czasu jako podstawowe kry-
terium wyboru wariantu organiza-
cyjnego, Zavadskas, Kaklauskas,
Turkis (1997). Ponadto przedsta-
wiono sposoby ustalania kolejności
robót na działkach z wykorzysta-
niem sprężeń czasowych Afanasjev
(1994, 2000) Hejducki (1999, 2000,
2001), Mrozowicz (1997,1999, 2001).
Jest on rozwinięciem LSM (Linear
Scheduling Model), z uwzględnie-
niem zagadnienia kolejnościowe-
go (seguencing problem). Wśród
wielu czynników mających wpływ
na wielkość buforu przedsięwzię-
cia, można wymienić następujące
czynniki niepewności, np. zakłó-
cenia dostaw materiałów i urzą-
dzeń, nierównomierne finansowe,
błędy projektowe, zmienne czynniki
atmosferyczne, awarie sprzętu, nie-
sprawność wykonawców, zakłóce-
nia administracyjno-prawne i wiele
innych. W literaturze dotyczącej
metodyki CCS/BM, tj. łańcuchów
krytycznych proponuje się wprowa-
dzenie dodatkowych rezerw (bufo-
rów) znajdujących się zarówno
na końcu drogi krytycznej przedsię-
wzięcia PB (project buffer) jak i poza
nią FB (feeding buffer). Są to mini-
malne rezerwy związane z dostawa-
mi materiałów, maszyn oraz pracą
firm wykonawczych. Wykonawcy
negocjując terminy wykonania
zadań, uwzględniają swoje bezpie-
czeństwo dotrzymania umownego
terminu realizacji, poprzez intuicyj-
ne wprowadzenie rezerw czasu
(buforów) zarówno z uwzględnie-
niem swoich podwykonawców jak
i dostawców. Proponowane arbitral-
ne skracanie terminów dla poszcze-
gólnych uczestników procesu reali-
zacji (np. o 50%, Goldratt), wydaje
się podejściem bardzo subiektyw-
nym, co wymaga weryfikacji prak-
tycznej. Tak więc wielu autorów
próbuje sprowadzić zagadnienia
losowe do deterministycznych,
które następnie łatwo można wyko-
rzystać w praktyce. Rozwiązania
koncepcyjne i modelowe dla poje-
dynczych procesów są dość boga-
to przedstawione i analizowane. Dla
bardziej złożonych przedsięwzięć,
zagadnienie harmonogramu może
być zaliczone do grupy trudnych,
o dużej złożoności obliczeniowej.
Dotyczy to przede wszystkim uję-
cia zagadnienia kolejnościowego,
które ma charakter permutacyj-
ny z uwzględnieniem ograniczeń
technologicznych, organizacyj-
nych, funkcji celu o np. T®min.
Analizując przebieg przedsięwzięć
budowlanych, zauważyć można
sprzeczność podejścia do sza-
cowania czasu trwania procesów
przez wykonawców oraz inwesto-
rów (generalnego wykonawcy PM/
CM). Wykonawca chce najczęściej
zapewnić sobie ciągłość wykona-
nia swojego zadania, minimalizu-
jąc koszty, związane z przestojami
na placu budowy, zabezpieczenia
materiałów, urządzeń, konieczności
Zastosowanie buforów czasu
w harmonogramowaniu procesów
budowlanych
Dr inż. Magdalena Rogalska, Politechnika Lubelska
Dr hab. inż. Zdzisław Hejducki, Politechnika Wrocławska
PRZEGLĄD BUDOWLANY
6/2005
ZARZĄDZANIE–ORGANIZACJA
37
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
obniżenia wydajności, ze względu
na możliwość przerw w ich pracy.
Inwestor (generalny wykonawca
PM/CM) najczęściej stara się tak
sterować procesem budowy, aby
w momencie pojawienia się możli-
wości natychmiast rozpocząć kolej-
ny proces technologiczny na danym
fragmencie realizowanego obiektu.
Z uwagi na różne wielkości robót
i czasy ich wykonania, zapewniając
ciągłość różnym procesom (robo-
tom ziemnym, fundamentowym,
konstrukcyjnym, wykończeniowym
i innym), firmy realizujące te proce-
sy mogą mieć przestoje, oczeku-
jąc wykonania robót poprzedzają-
cych. W wyniku przeprowadzonych
obliczeń zauważyć można, że dla
kompleksu robót, zapewnienie cią-
głości wykonania robót przez firmy
zapewnia dłuższy czas realizacji
przedsięwzięcia niż w przypadku,
gdy pracują one z przerwami, lecz
zapewniona jest ciągłość kolejnych
technologicznie robót. Ponadto,
zmienna kolejność wykonywania
robót na wielu częściach obiektów
wpływa na zwiększenie lub zmniej-
szenie czasu trwania przedsięwzię-
cia w stosunku do dyrektywnie
ustalonego.
2. Modelowanie macierzowe
kompleksu procesów budowla-
nych (MM)
Stosując do obliczenia harmono-
gramów systemy komputerowe,
łatwym sposobem wprowadze-
nia danych jest zapis macierzo-
wy. Pozwala on na podzał procesu
budowy, zgodnie z zasadami tech-
nologii, na rodzaje robót np. wg
metodyki WBS (work breakdown
strucktures) oraz wyznaczyć zada-
nia związane z budową poszczegól-
nych elementów obiektu budowla-
nego. Można w modelu macierzo-
wym ująć kolejność technologiczną,
np. przez ustalenie kodu macierzy
oraz wydzielić niezależne (np. poje-
dyncze budynki mieszkalne, części
obiektów rozdzielone, np. przer-
wami dylatacyjnymi, kondygnacje
budynku, na których mogą być
prowadzone, równolegle, potoko-
wo lub sekwencyjnie, np. roboty
wykończeniowe itp.). Tak zbudowa-
ną macierz wykorzystującą wiedzę
inżyniera eksperta, w postaci ciągu
cyfr można wykorzystać w różnych
standardowych systemach kompu-
terowych, np. Mathematica, Matlab
lub indywidualnych, np. Organizator.
Modele macierzowe przedsięwzięć
budowlanych mogą być zastoso-
wane do obliczania parametrów
harmonogramów.
3. Podstawowe założenia
do obliczeń
Uwzględnienie przyjętych ograni-
czeń wymaga wykonania obliczeń
w celu ustalenia wartości kluczo-
wych harmonogramu, takich jak:
terminów rozpoczęcia i zakończe-
nia robót, wielkości sektorów, liczby
wykonawców, kolejności sektorów,
przebiegu ścieżki krytycznej, czasu
wykonania zadania. Dopuszczalne
są przestoje wykonawców oraz
sytuacje, kiedy w danym sektorze
nie są prowadzone prace w sposób
ciągły. Oczywiście ma to wpływ
na całkowity czas wykonania zada-
nia TT. Do obliczeń stosuje się pro-
gramy komputerowe, modyfikowa-
ne z wersji pierwotnej o nazwie
POTOKI. Modyfikacje następują
równolegle wraz z rozwojem meto-
dy (np. w związku z wprowadza-
niem nowych ograniczeń) i technik
komputerowych. Ostatnią wersją
jest ORGANIZATOR, ale już przy-
gotowywany jest do modyfikacji
w celu uwzględnienia zakłóceń
pogodowych w budownictwie dro-
gowym oraz TOC (Teorii Ograniczeń
Goldratta) poprzez wprowadzenie
buforów zasilających i skrócenie
czasu trwania procesów. Program
komputerowy ORGANIZATOR ge-
neruje cyklogramy i sieci zależ-
ności (układ procesów w sekto-
rach i zależności pomiędzy nimi),
a nie wykresy Gantta. Kluczowymi
wartościami w cyklogramach są
czasy wykonania poszczególnych
procesów w sektorach oraz punk-
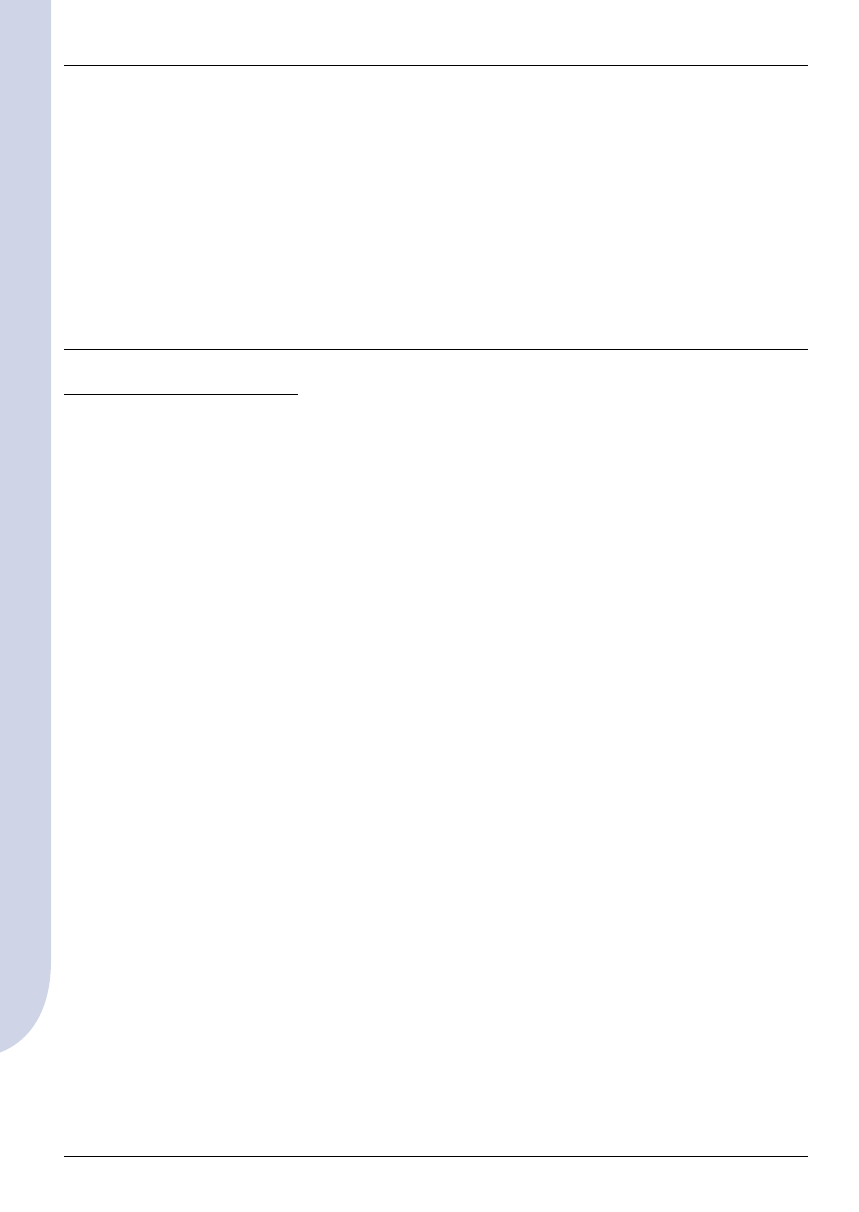
ty kontrolne CP. Wprowadza się
następujące oznaczenia stosowane
w publikacjach zagranicznych:
LT – (least time) najkrótszy czas
pomiędzy procesem w toku
a kolejnym procesem – najmniejszy
dystans czasowy,
LD – (least distance) najmniejsza
odległość miejsca pomiędzy proce-
sem w toku a kolejnym procesem,
CPH – (controling path) droga
krytyczna procesów budowlanych
[dni],
CL – (controling link) ścieżka
krytyczna – połączenie graficzne
pomiędzy kolejnymi procesami,
CP – (controling point) punkt kry-
tyczny odpowiadający rozpoczęciu
kolejnego procesu,
T – czas trwania procesu,
TT – (time total) całkowity czas
wykonania zadania,
m – liczba procesów,
n – liczba sektorów.
Uwzględniając wpływ czynników
niepewności, jako zasilające bufory
czasu FB i projektowe PB, przeana-
lizowano ich wpływ na całkowity
czas realizacji TT. Zastosowano pro-
gram komputerowy ORGANIZATOR
wykorzystujący algorytmy optymali-
zacji kombinatorycznej o charakte-
rze permutacyjnym. Jako funkcję
celu przyjęto minimalny czas reali-
zacji przedsięwzięcia
T ® T
min
Poniżej przedstawiono założenia
do obliczeń parametrów harmono-
gramów:
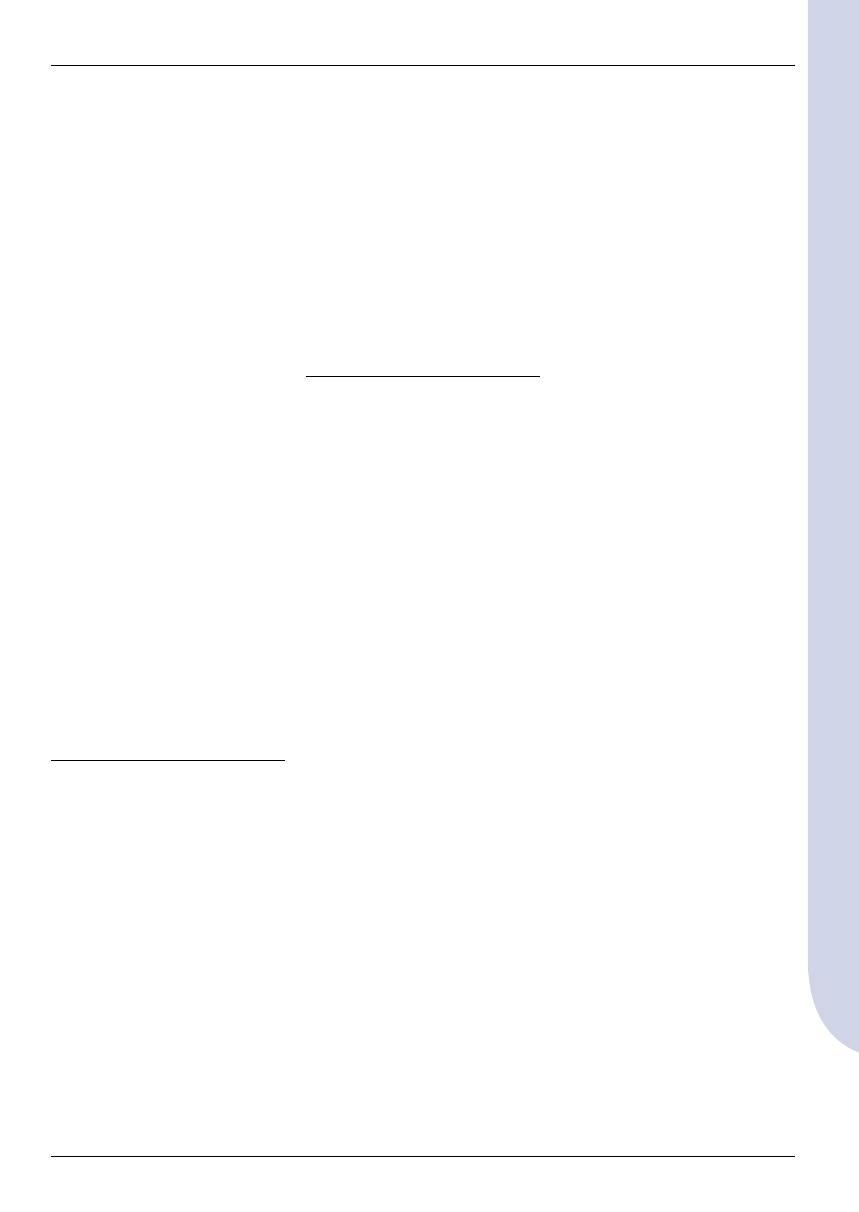
I Warunek ciągłości procesów
budowlanych dla każdego rodza-
ju (metoda sprzężeń czasowych
TCM I)
LT1.1….LTn.m = 0
II Warunek ciągłości procesów
budowlanych w kolejności tech-
nologicznej, w sektorach (metoda
sprzężeń czasowych TCM II)
LD1.1….LDn.m = 0
III Warunek utworzenia minimalnej
drogi krytycznej (metoda sprzężeń
czasowych TCM III, IV i V)
CPH = TTmin
Warunek I (metoda sprzężeń czaso-
wych TCM I) stosuje się w przypad-
ku, kiedy założeniem priorytetowym
jest zapewnienie ciągłości wykony-
wania procesów P1.....Pm w sek-
torach S1....Sn. Zwykle wiąże się
to z zapewnieniem ciągłości pracy
PRZEGLĄD BUDOWLANY
6/2005
38
ZARZĄDZANIE–ORGANIZACJA
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
wykonawcom lub pracy sprzętu.
Ze względu na przyjętą technolo-
gię zapewnienie ciągłości procesu
może stać się założeniem prioryte-
towym, np. w przypadku koniecz-
ności betonowania bez szwów tech-
nologicznych. Ta sama sytuacja ma
miejsce w odniesieniu do procesów
wiodących, czyli umożliwiających
rozpoczęcie wszystkich zależ-
nych od niego prac. Zdarza się,
że ze względów ekonomicznych
zatrudnienie określonego wyko-
nawcy lub sprzętu po uwzględnie-
niu postojów staje się nieopłacalne.
Nie przynosi również zysku wielo-
krotne podejmowanie pracy przez
tego samego wykonawcę ze wzglę-
du na transport i montaż sprzę-
tu oraz urządzeń. Niektóre firmy
wykonawcze szczególnie wysoko
wyspecjalizowane, stawiają jako
warunek podjęcia zadania zapew-
nienie ciągłości ich prac. Nadwyżka
popytu nad podażą niektórych
usług powoduje, że zapewnienie
ciągłości pracy pewnym wykonaw-
com staje się założeniem prioryte-
towym.
Na rysunku 2 określono dane wyj-
ściowe, które zostaną wygenero-
wane przez program komputerowy
ORGANIZATOR.
Do obliczeń przyjmujemy z góry
założone i obliczone w sposób
deterministyczny sektory S1....Sn,
procesy P1....Pm uszeregowane
w kolejności technologicznej oraz
czasy ich wykonania T1.1...Tn.m.
Zakłada się, że nie jest na tym eta-
pie ostatecznie ustalona kolejność
wykonywania prac w poszczegól-
nych sektorach. Będzie ona osta-
tecznie ustalona na etapie opty-
malizacji pierwszej, która następu-
je po dokonaniu podstawowych
obliczeń. Zatem należy przyjąć
pewną kolejność sektorów, jed-
nak nie będzie problemem zmiana
ich kolejności. Wystarczy jedynie
wywołać opcję OPTYMALIZACJA
i zostanie to wykonane w ciągu
kilku sekund bez konieczności
ponownego wpisywania danych
czy też wnikliwej analizy danych.
Zwykle najkorzystniejsze wyniki
obliczeń uzyskuje się, gdy czas
trwania procesów w ostatnim sek-
torze jest najkrótszy w odniesieniu
do pozostałych. Jako efekt obliczeń
otrzymamy całkowity czas wykona-
nia przedsięwzięcia TT, który będzie
dłuższy lub równy minimalnemu
czasowi trwania przedsięwzięcia
TTmin w odniesieniu do zastosowa-
nia wszystkich pięciu pozostałych
metod obliczeniowych programem
ORGANIZATOR. Natomiast dystan-
se czasowe LT1.1....LTn.m pomię-
dzy procesami w toku a kolejnymi
występującymi po nich zawsze są
równe zeru – czyli zagwarantowa-
na została ciągłość procesów P1...
Pm. Jednocześnie prawdopodob-
nie nie uzyskamy ciągłości pracy
Rys. 2. Schemat obliczeń z uwzględnieniem warunku I
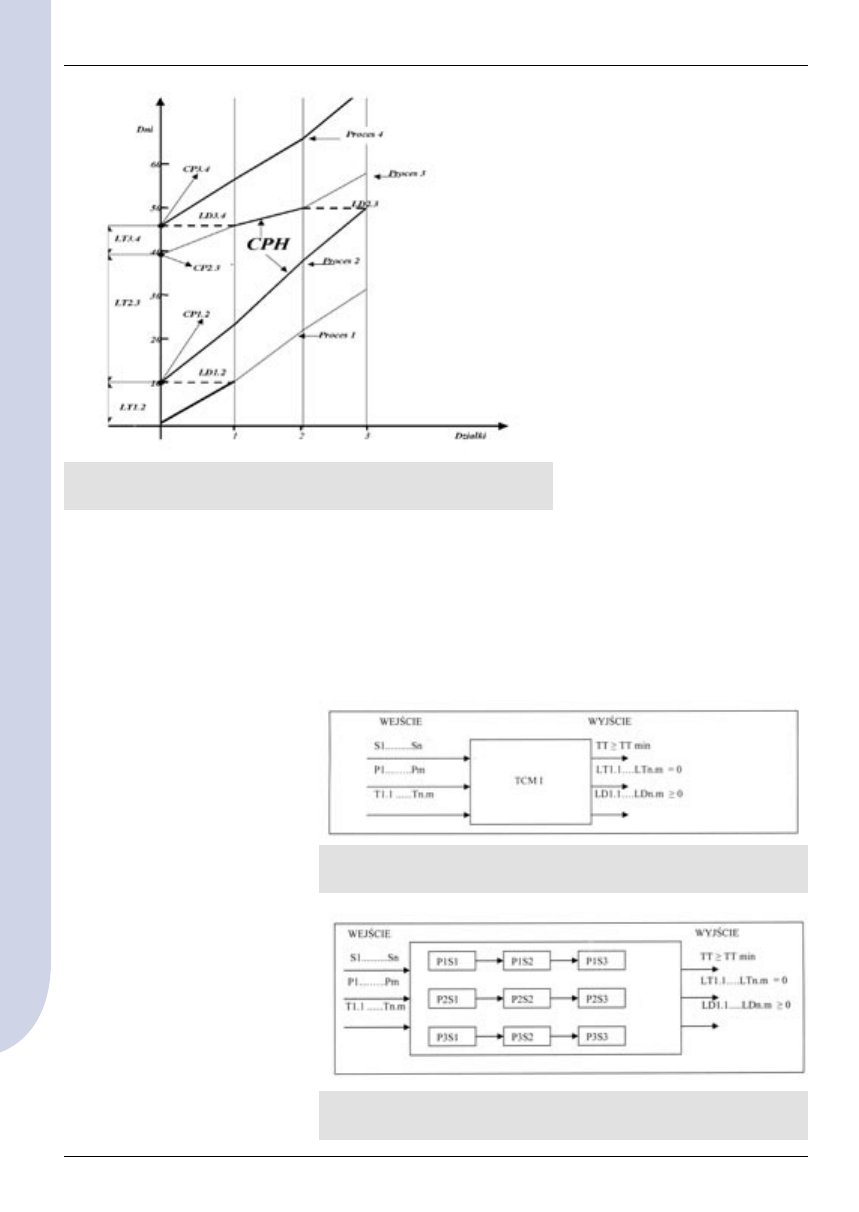
Rys. 3. Powiązania priorytetowe
Rys. 1. Procesy ciągłe, oznaczenia
PRZEGLĄD BUDOWLANY
6/2005
ZARZĄDZANIE–ORGANIZACJA
39
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
w sektorach, jakkolwiek czasem
może się to zdarzyć, nie jest to jed-
nak założenie priorytetowe.
Na rysunku 2 przedstawiono po-
wiązania priorytetowe, czyli takie,
dla których LT zawsze muszą być
równe zero i stanowić będą bazę
w tworzeniu harmonogramu.
4. Analiza buforów czasu
w LSM – Linear Scheduling
Model
Poniżej przedstawiono schematy
wybranych cyklogramów utworzo-
nych na podstawie przykładowych
danych liczbowych. Celem analizy
było określenie wpływu buforów
zasilających FB na czas trwania
przedsięwzięcia TT. Analizę prze-
prowadzono dla dwóch przypad-
ków usytuowania drogi krytycznej
na cyklogramie: z uwzględnieniem
skrajnych procesów początkowych
oraz skrajnych procesów końco-
wych. Wiąże się to ze zmianą poło-
żenia buforów zasilających FB oraz
przebiegu drogi krytycznej w nowym
łańcuchu CC. W tabelach podano
czasy trwania procesów w sekto-
rach, w tabeli 1 dane wejściowe,
w tabeli 2 oraz 3 zmodyfikowane
wartości, z uwzględnieniem zało-
żeń obliczania buforów czasu wg
metody E. Goldratta. Dla jasności
wywodu przedstawiono sieci zależ-
ności procesów z zaznaczeniem
klasycznej drogi krytycznej (rys. 4)
oraz łańcuchów krytycznych z bufo-
rami czasu FB i PB.
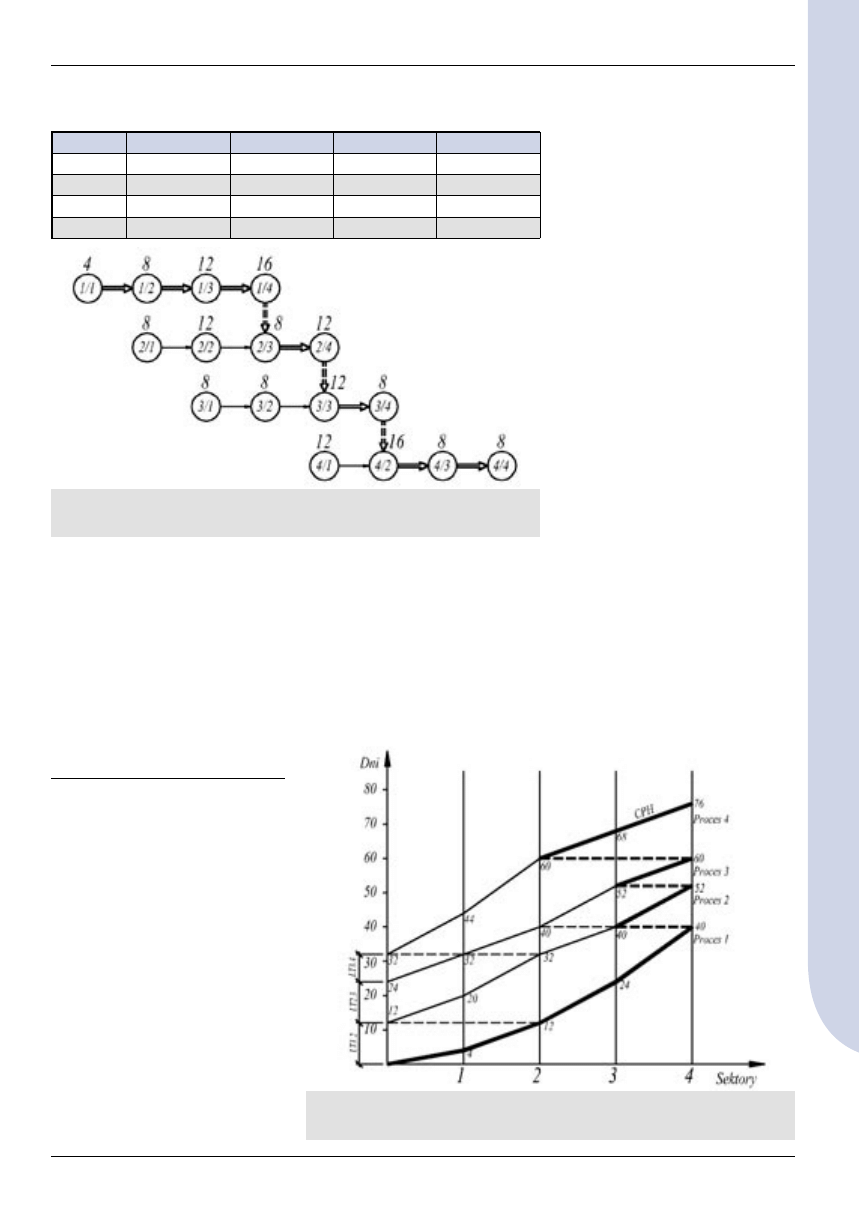
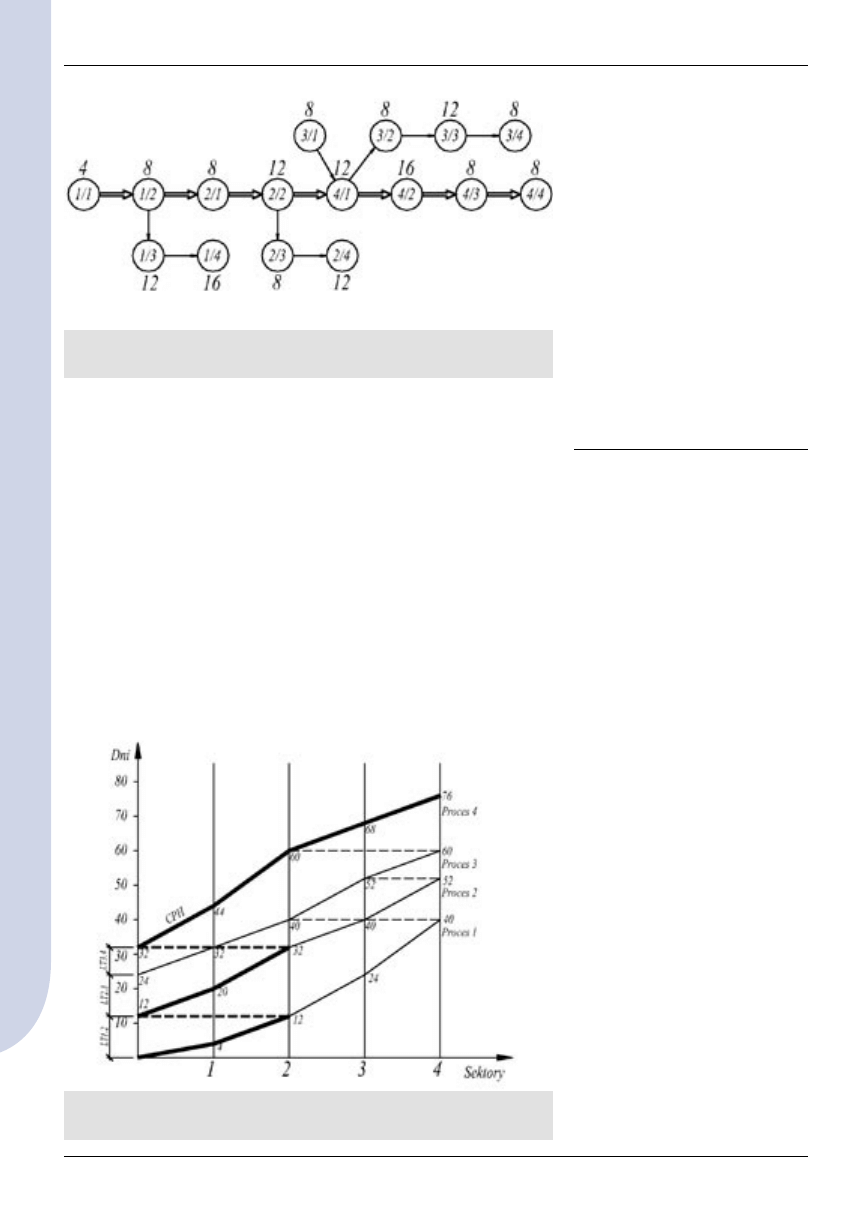
W wyniku przeprowadzonych,
z zastosowaniem programu ORGA-
NIZATOR, obliczeń uzyskano
czasy trwania poszczególnych
prac w sektorach, które pozwoli-
ły na zbudowanie cyklogramu wg
metodyki LSM. Na rysunku 5 oraz
7 pojawiły się dwie drogi krytyczne
łączące procesy początkowe oraz
końcowe. Uwzględnienie warunku
ciągłości procesów (TCM I) spo-
wodowało, że wielkości LT 1, LT 2,
LT 3 zapewniają maksymalne zbli-
żenie procesów 1, 2, 3. Analizując
przebieg procesów i tworząc drogę
krytyczną CPH, można zauważyć,
że minimalny czas realizacji przed-
sięwzięcia TT uzyskuje się w wyniku
sumowania odpowiednich czasów
trwania procesów w sektorach,
które mogą utworzyć dwie niezależ-
ne drogi krytyczne.
Schematy i przebieg dróg krytycz-
nych pokazano na rysunku 5 i 7.
Na rysunku 4 i 6 przedstawiono
w układzie sieci zależności drogi
krytycznej dla dwóch wariantów
ich przebiegu. Analizując układ pro-
cesów, zauważyć można, że wła-
ściwie z uwagi na przyjęte ograni-
czenia (warunek I, TCM I) wszystkie
procesy wykonywane w sektorach
mają charakter procesów krytycz-
nych, mimo że nie znajdują się
na drodze krytycznej. Uwzględniony
warunek ciągłości wykonania pro-
cesów(TCM I) powoduje, że wydłu-
Tab. 1. Dane wejściowe
Sektor
Proces 1
Proces 2
Proces 3
Proces 4
1
4
8
8
12
2
8
12
8
16
3
12
8
12
8
4
16
12
8
8
Rys. 4. Sieć zależności dla danych wejściowych z tabeli 1
Rys. 5. Cyklogram z wariantem drogi krytycznej
PRZEGLĄD BUDOWLANY
6/2005
40
ZARZĄDZANIE–ORGANIZACJA
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
żenie czasu trwania jakiegokolwiek
z nich wpływa na całkowity czas
realizacji TT.
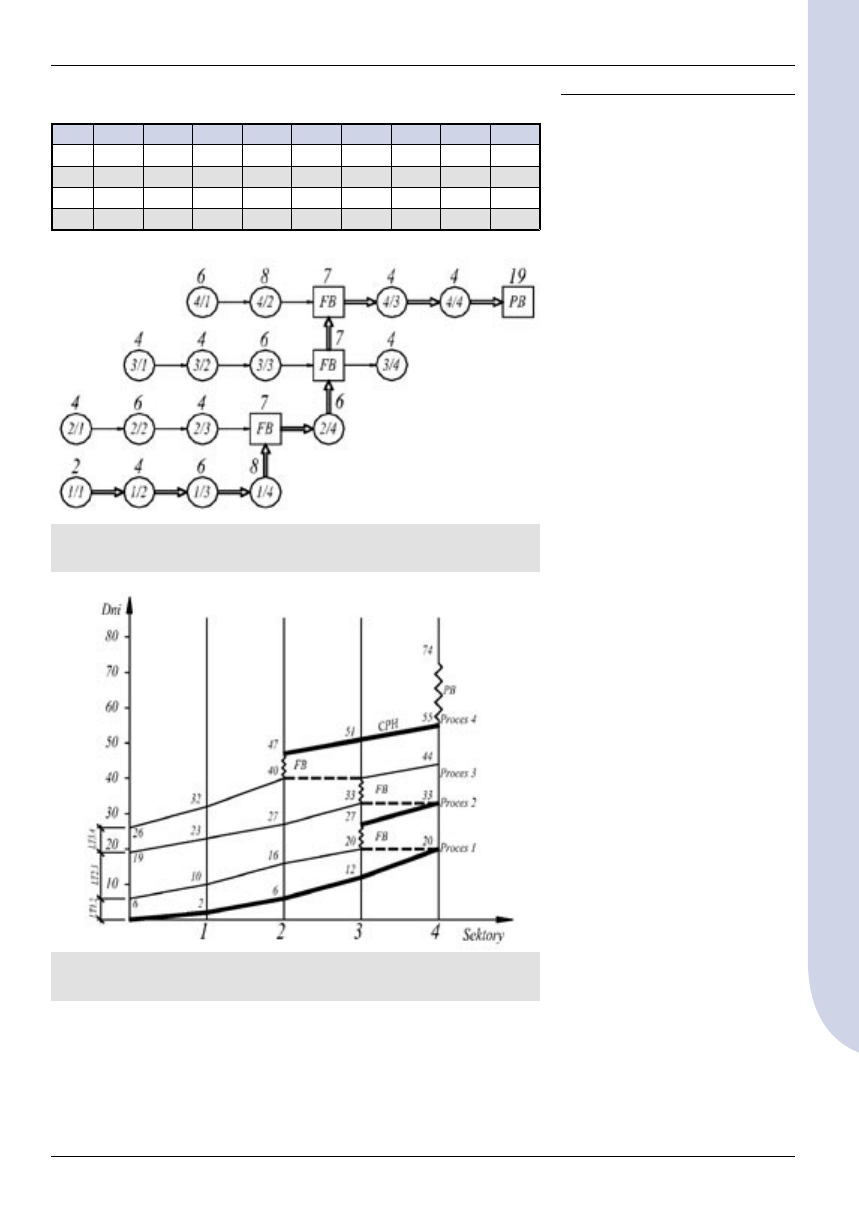
W tabeli 2 przedstawiono zmodyfi-
kowane dane czasów trwania pro-
cesów z uwzględnieniem metody
Goldratta. Wprowadzono wartości
buforów zasilających FB i PB dla
ciągu procesów i drogi krytycznej.
Obliczenia przeprowadzono z zasto-
sowaniem programu komputerowe-
go, a uzyskane wyniki przedstawio-
no na rysunku 9. Analizując cyklo-
gram zauważyć można, że bufory
zasilające weszły w skład łańcucha
krytycznego, wpływając bezpośred-
nio na czas trwania przedsięwzięcia
TT. Uzyskano całkowity czas reali-
zacji TT = 74 jednostki, pomimo
skrócenia poszczególnych czasów
trwania procesów o połowę i zamia-
ny zredukowanych czasów bufo-
rem o wymiarze 25%. Nie spowo-
dowało to proporcjonalnego skró-
cenia całego przedsięwzięcia o tę
wartość. Czas całkowity TT uległ
nieznacznemu skróceniu z 76 jed-
nostek do 74.
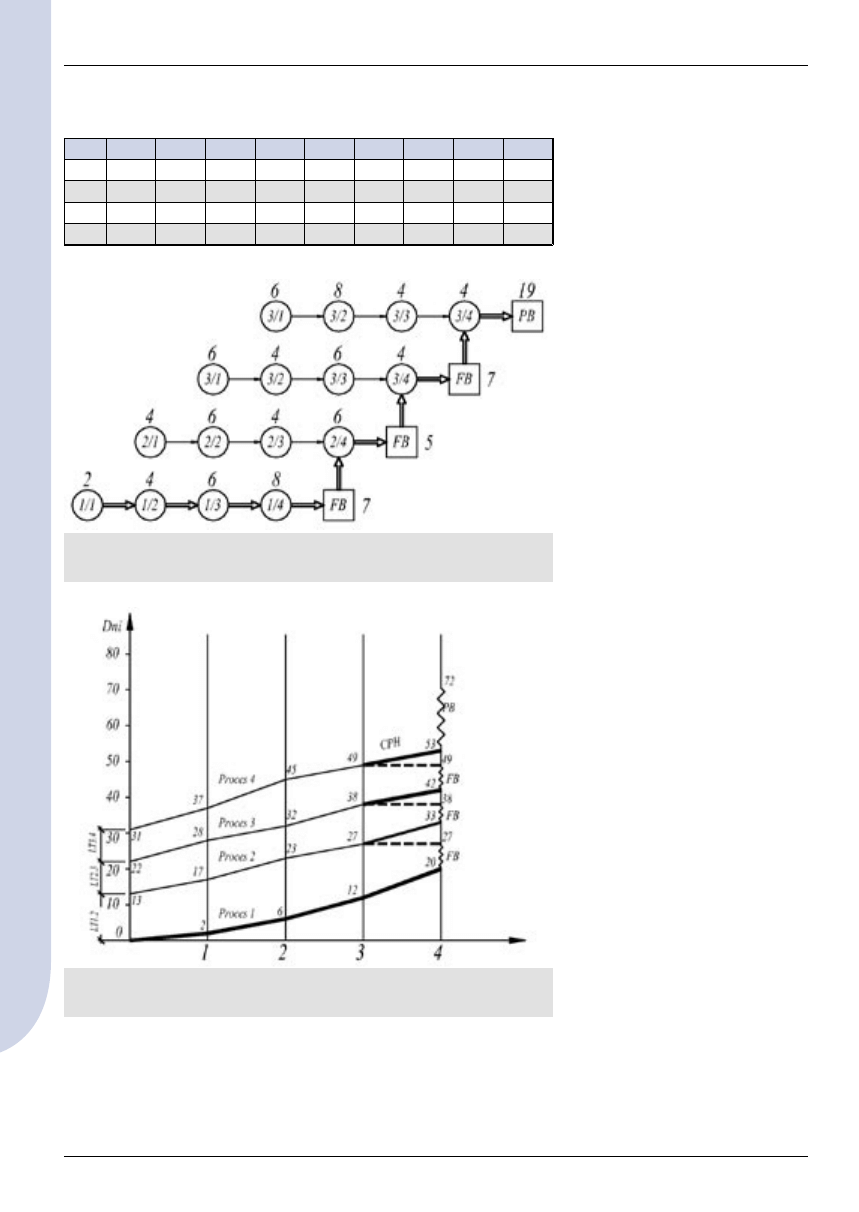
Na podstawie wariantu z drogą kry-
tyczną (rys. 5) utworzoną z proce-
sów końcowych sporządzono tabe-
lę 3, w której wprowadzono dane
liczbowe (czasy trwania procesów
w sektorach) zmodyfikowane wg
metody Goldratta. Wartości liczbo-
we buforów zasilających FB umiesz-
czono na końcach ciągów poszcze-
gólnych procesów. Na podstawie
analizy zbudowanego cyklogramu
(rys. 11), zawierającego wyniki obli-
czeń programu ORGANIZATOR
z zachowaniem ciągłości procesów
(TCM I) zauważyć można, że bufory
zasilające znalazły się w łańcuchu
krytycznym procesów i drodze kry-
tycznej, mając bezpośredni wpływ
na czas trwania przedsięwzięcia
TT=72 jednostki. Bufory zasilają-
ce FB mają charakter procesów
i tak są traktowane w obliczeniach.
Zmniejszenie ich wymiarów ma
wpływ na skrócenie czasu trwania
przedsięwzięcia.
5. Podsumowanie
Przeprowadzona analiza oraz
wykonane obliczenia potwierdzają
stwierdzenie, że skrócenie czasu
trwania poszczególnych procesów
nie powoduje skrócenia całkowite-
go czasu trwania przedsięwzięcia
z uwzględnieniem buforów o warto-
ści 25% T, jako uzyskanego zapasu
czasu. Jest to zbytnie uproszcze-
nie i być może słuszne dla proce-
sów sekwencyjnych. Czas trwa-
nia przedsięwzięcia zależny jest
od wyboru składowych łańcucha
krytycznego. Analizując mode-
le graficzne – cyklogramy budo-
wane wg metodyki LSM (Linear
Scheduling Model), można zauwa-
żyć, że przyjęcie łańcucha kry-
tycznego jak najbardziej zbliżone-
go do prawej krawędzi wykresu
powoduje skrócenie czasu trwania
przedsięwzięcia. W cyklogramach
istnieje ponadto konieczność trak-
towania buforów zasilających FB
jako osobnych procesów, ze wzglę-
du na warunek zachowania ciągło-
ści pracy grup roboczych i uniknię-
cia strat finansowych związanych
z niepotrzebnymi przestojami.
Stosując algorytmy szeregowania
zadań w opcji programu kompu-
terowego ORGANIZATOR, istnieje
możliwość skrócenia czasu trwa-
nia przedsięwzięcia poprzez zmia-
nę kolejności wykonywania prac
w poszczególnych sektorach, pod
warunkiem niezależności i dostęp-
Rys. 6. Sieć zależności dla danych wejściowych z tabeli 1
Rys. 7. Cyklogram z wariantem drogi krytycznej
PRZEGLĄD BUDOWLANY
6/2005
ZARZĄDZANIE–ORGANIZACJA
41
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
ności sektorów robót. W zależno-
ści od jednostkowego kwantyfiko-
wanego ryzyka danego procesu
istnieje możliwość przyjmowania
zróżnicowanych wielkości buforów
zasilających FB i projektowego PB.
Zapewnią one wówczas uwzględ-
nienie szczególnych uwarunko-
wań technicznych zróżnicowanych
procesów budowlanych, lokalnych
ograniczeń wykonawczych i czyn-
ników ryzyka.
BIBLIOGRAFIA
[1] Afanasjev V.A, Afanasjev A.V., Potocnaja
organizacja rabot v stroitelstwie, Sankt-
Petersburg, 2000.
[2] Arditi D., Tokdemir O.B.& Suh K.,
Scheduling system for repetitive unit
construction using line-of-balance
technology, Department of Civil and
Architectural Engineering, Illinois Institute
of Technology, Department of Civil
Engineering, Honan University, Honam,
South Korea, 2001.
[3] Arditi D., Tokdemir, O.B. & Suh, K.,
Effect of learning on line-of-balance
scheduling, International Journal of Project
Management, in press, 2001.
[4] Chrzanowski, Jr., E. N., and Johnston,
d. W., Application of linear construction,
J. Constr. Eng.,112(4), 476-491, 1986.
[5] Goldratt E.M. Critical Chain, Great
Barrington, MA: The North River Press, 1997.
[6] Goldratt E.M.,Fox R.E., The Race.
Croton-on-NY, North River Press, 1986.
[7] Goldratt E.M., The Haystack Syndrome.
Croton-on-Hud, North River Press, 1990.
[8] Goldratt E.M, It is no luck, Aldershot,
England, Gower, 1994.
[9] Goldratt E.M, The Goal, Great
Barrington, MA, The North River Press, 1 st
ed. 1984, 2nd revised ed. 1992.
[10] Herroelen W., Leus R., On the merits
and pitfalls of critical chain scheduling,
Journal of Operations Management 19
(2001) 559-577.
[11] Hamerlink D.J., Linear scheduling
model: The development of a linear
scheduling model with micro computer
application for highway construction control,
PhD tezis, Iowa State Univ., 1995.
[12] Hamerlink D.J., Rowings J.E.,
Linear scheduling model: Development
of controlling activity path, Journal of
Construction Engineering and Management,
124(4), 266–268, 1998.
[13] Harris R., B., Ionnou P.G., Scheduling
projects with repeating activities, Journal of
Construction Engineering and Management,
124(4), 269-278, 1998.
[14] Hegazy, T., Optimization of construction
time-cost trade-off analisys using genetic
algorithms, Canadian Journal of Civil
Engineering, 26: 685-697, 1999.
[15] Hegazy, T., Moselhi, O. & Fazio, P.,
BAL: an algorithm for scheduling and control
of linear projects, AACE Transactoins, C.8,
8.1 – 8.14, 1993.
[16] Hejducki Z., Sprzężenia czasowe
w metodach organizacji złożonych
procesów budowlanych, WPWr, 2000.
[17] Jaworski K.M., Metodologia
projektowania realizacji budowy, PWN,
Warszawa, 1999.
[18] Johnston, D.W., Linear scheduling
method for highway construction,
J. Constr. Div., Am. Soc. Civ. Eng, 107(2),
247-261, 1984.
[19] Kasprowicz T., Inżynieria przedsięwzięć
budowlanych, Warszawa, WAT, 2002.
Tab. 2. Dane liczbowe zmodyfikowane wg Metody Goldratta
Sektor
P1
FB1
P2
FB2
P3
FB3
P4
FB4
PB
1
2
0
4
0
4
0
6
0
0
2
4
0
6
0
4
0
8
7
0
3
6
0
4
7
6
7
4
0
0
4
8
0
6
0
4
0
4
0
19
Rys. 8. Sieć zależności z uwzględnieniem buforów czasu
Rys. 9. Cyklogram z łańcuchem krytycznym i buforami czasu
PRZEGLĄD BUDOWLANY
6/2005
42
ZARZĄDZANIE–ORGANIZACJA
A
R
T
Y
K
U
Ł
Y
P
R
O
B
L
E
M
O
W
E
[20] Marcinkowski R, Metody rozdziału
zasobów realizatora w działalności
inżynieryjno-budowlanej Warszawa, WAT,
2002.
[21] Mattila K.G., Acse A.M., Park A.,
Comparison of Linear Scheduling Model
and Repetitive Scheduling Method, J.Constr.
Eng. Manage., 129(1), 56-64, 2003.
[22] Mattila, K.G. & Abraham, D. M.,
Resource leveling of linear schedules using
integer linear programming, Journal of
Construction Engineering and Management,
ASCE, 120(4), 232 – 244, 1998.
[23] Moder,J.J., Philips, C.R., and Davis,
E.W., Project Management with CPM,
PERT and precedence diagramming, Van
Nostrand Reinhold, New York, 1983.
[24] Moselhi, O. & El-Rayes, K., Scheduling
of respective projects with cost optimization,
Journal of Construction Engineering and
Management, ASCE, 199, 681-697, 1993.
[25] Mrozowicz J., Metody organizacji
procesów budowlanych uwzględniające
sprzężenia czasowe, WPWr, 1997.
[26] O’Brien, J. J., Scheduling handbook,
McGraw-Hill, New York, 1969.
[27] Rahbar, F.F., and Rowings, J. E.,
Respective activity scheduling process,
Trans., Am. Assn. Cost Eng., 2,
O.5.1-O.5.8, 1992.
[28] Rowings, J.E. & Rahbar, f., Use of
linear scheduling in transportation projects,
In: Proceedings of the Transportation
Research Board 71st Annual Meeting. TRB,
Washington, D.C., 1992.
[29] Senouci, A.B. & Eldin, N.N., Dynamic
programming approach to scheduling
of nonserial linear project, Journal of
Computing in Civil Engineering, 10,
106-144, 1996.
[30] Stella, P. and Glavinich, T., Construction
planning and scheduling, 2nd Ed.,
Associated General Contractors of America,
Alexandria, Va, 1994.
[31] Stradel, O., and Cacha, J., Time space
scheduling method” J.Constr. Div., Am. Soc.
Civ. Eng., 108(3), 445-457, 1982.
[32] Suhail, S. A., and Neale, R. H,
CPM/LOB: New methodology to integrare
CPM and line of balance, J. Constr. Eng.
Manage., 120(3), 667-684, 1994.
[33] Thabet, W.Y. & Beliveau, Y.J.,
HVLS: horizontal and vertical logic
scheduling for multistory projects, Journal of
Construction Engineering and Management,
ASCE, 120, 875-892, 1994.
[34] Vorster, M. C., and Parvin, C. M.,
„Linear scheduling for highway constractors
and state DOT’s.” Videotapes, P&W
Publications, Richmond, Va, 1990.
[35] Vorster, M.C., and Bafna T., Discussion
of „Formal development of line-of-balance
technique” by Z. M. Al Sarraj, J. Constr.
Eng. Manage., 118(1), 210-211, 1992.
[36] Vorster, M.C., Beliveau, Y.J., and Bafna,
T., Linear scheduling and visualization,
Transp. Res. Rec. 1351, 32-39, 1992.
[37] Wang, C. & Huang, Y., Controling
activity interval times in LOB scheduling .”
Construction Management and Economics,
16, 5-16, 1998.
[38] Zavadskas E.K., Mehrkriterielle
Entscheidungen im Bauwesen, Vilnius,
Technika, 2000.
[39] Zawadskas E.K. Kaklauskas A.,
Turskis Z., Multikriteria decision-making
system for building refurbishment Statyba,
Vilnius, 1997.
Tab. 3. Dane liczbowe zmodyfikowane wg metody Goldratta – wartości FB
dla drogi krytycznej
Sektor
P1
FB1
P2
FB2
P3
FB3
P4
FB4
PB
1
2
0
4
0
4
2
6
0
4
0
6
0
4
0
8
0
3
6
0
4
0
6
0
4
0
4
8
7
6
5
4
7
4
0
19
Rys. 10. Sieć zależności z uwzględnieniem buforów czasu
Rys. 11. Cyklogram z łańcuchem krytycznym i buforami czasu
Wyszukiwarka
Podobne podstrony:
skrócenia, metodologia procesów budowlanych
Uczestnicy procesu budowlanego i ich obowiązki
sciąga anki, szkoła, semestr 5, organizacja procesów budowlanych, OPB na egzamin
EKONOMIKA BUDOWNICTWA, PROCES BUDOWLANY, Budownictwo stalowe obejmuje zasadniczo budowle i konstrukc
projekt opb1, Budownictwo, IV sems, Organizacja Procesów Budowlanych, PROJEKT DEJWA
w6Modelowanie procesów budowlanych sieci zaleznosci
koszty i czas, metodologia procesów budowlanych
TECHNOLOGIA PRODUKCJI BUDOWLANEJ I ZASADY PROJEKTOWANIA PROCESÓW BUDOWLANYCH, Technologiczne
organizacja procesów budowlanych
OPB Kasprowicz, szkoła, semestr 5, organizacja procesów budowlanych, OPB na egzamin
PODSTAWY INŻYNIERII PROCESÓW BUDOWLANYCH
Harmonogramowanie robót budowlanych w warunkach niepewności i ryzyka
Zał.+nr+2+do+SIWZ+-projekt+umowy, Budownictwo AGH 1, Organizacja procesów budowlanych, OPB!!, OPB ry
TKB Opis Techniczny Obliczenia Projektowe Harmonogram Robót Budowlanych
Proces budowlany dla poczatkujących 2008
więcej podobnych podstron