
Szkolenia techniczne
Zeszyt do samodzielnego kształcenia nr 389
Układ automatycznego parkowania
Budowa i zasada działania
2
Zeszyt do samodzielnego kształcenia przedstawia
budowę i zasadę działania nowego rozwiązania
technicznego!
Jego treść nie jest później aktualizowana.
Aktualne informacje na temat diagnozy, regulacji
i naprawy prosimy zaczerpnąć z właściwej
literatury serwisowej!
Układy wspomagające kierowcę w różnych
manewrach i sytuacjach powstają po to, by odciążyć
go w warunkach wzrastającego natężenia ruchu
i rosnącej liczby informacji. Potrafią one nie tylko
informować kierowcę, ale nawet zastępować go
całkowicie lub częściowo w niektórych czynnościach.
Ponieważ moc obliczeniowa procesorów rośnie
a koszt produkcji części elektronicznych maleje,
nie może dziwić stale wydłużająca się lista
skomplikowanych układów wspomagających,
oferowanych w samochodach Volkswagen.
Przykładem takiego skomplikowanego układu jest
nowy układ automatycznego parkowania.
Jego zadaniem jest aktywna pomoc kierowcy podczas
parkowania tyłem pomiędzy dwoma samochodami.
S389_020
NOWOŚĆ
Uwaga
Wskazówka

3
Rzut oka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
Budowa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Elementy układu i ich lokalizacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Schemat układu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
Elektromechaniczne wspomaganie układu kierowniczego . . . . . . . . . . . . . 10
Zasada działania układu automatycznego parkowania . . . . . . . . . . . . . . . 12
Przebieg parkowania . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Warunki włączenia układu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Warunki wyłączenia i komunikaty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Elementy elektryczne. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Czujniki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Elementy wykonawcze . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Sterowanie układu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Schemat funkcjonalny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Serwis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Sprawdzamy swoją wiedzę . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
O czym będzie mowa

4
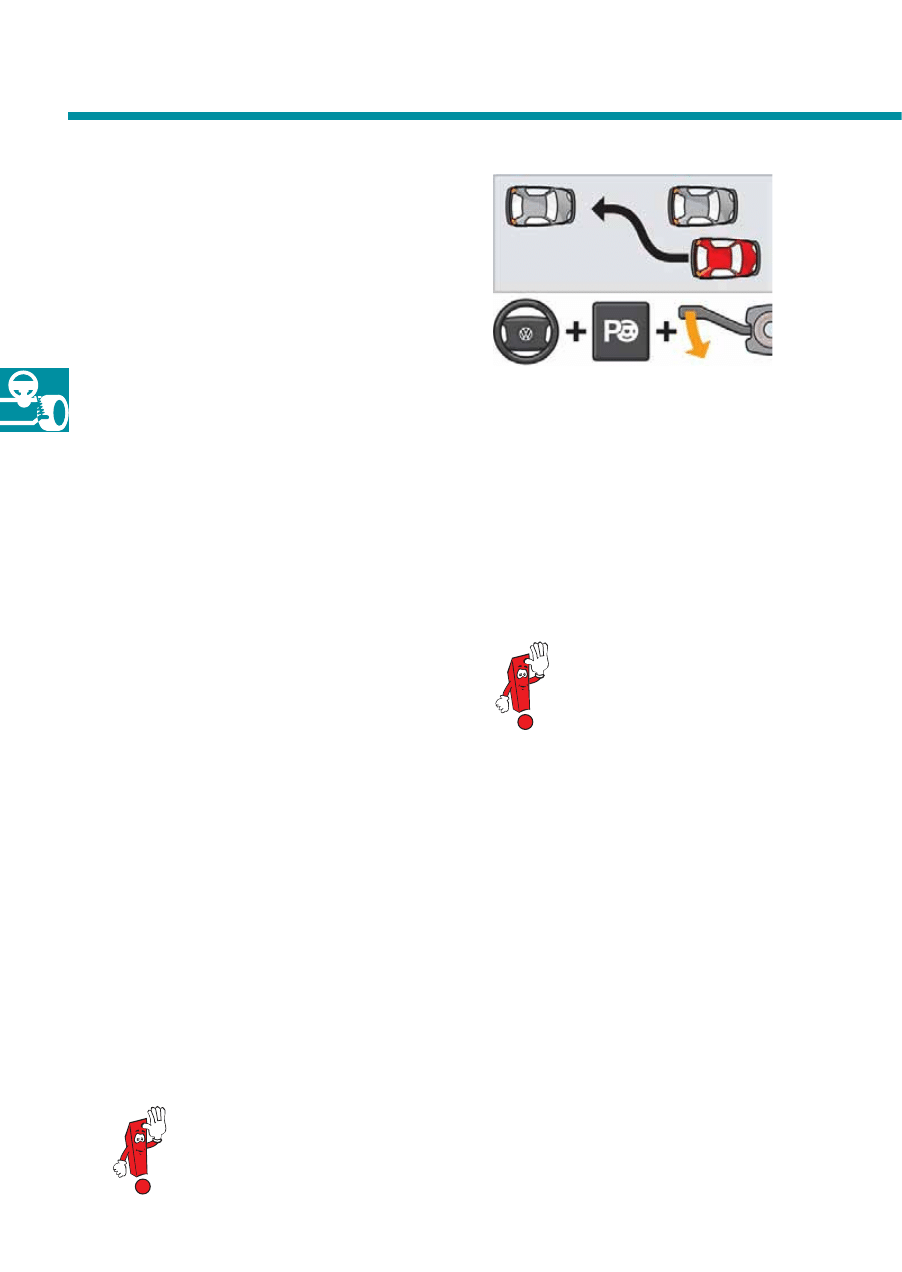
Rzut oka
Układ automatycznego parkowania konstrukcji
Volkswagena
Ten układ aktywnie pomaga kierowcy
w zaparkowaniu tyłem w luce przy krawężniku.
Wykorzystuje on układ pomocy w parkowaniu, który
za pomocą czujników ultradźwiękowych i brzęczyka
ostrzega kierowcę o zbliżaniu się do przeszkody lub
innego zaparkowanego samochodu.
Kolejnym etapem rozwojowym układów tego typu jest
np. kamera cofania, która nie tylko informuje
o przeszkodzie, ale i pokazuje jej lokalizację.
We wszystkich takich układach kierowca musi jednak
sam kierować samochodem.
Układy pomagają jedynie kierowcy w zauważeniu
przeszkody i ocenie odległości od niej.
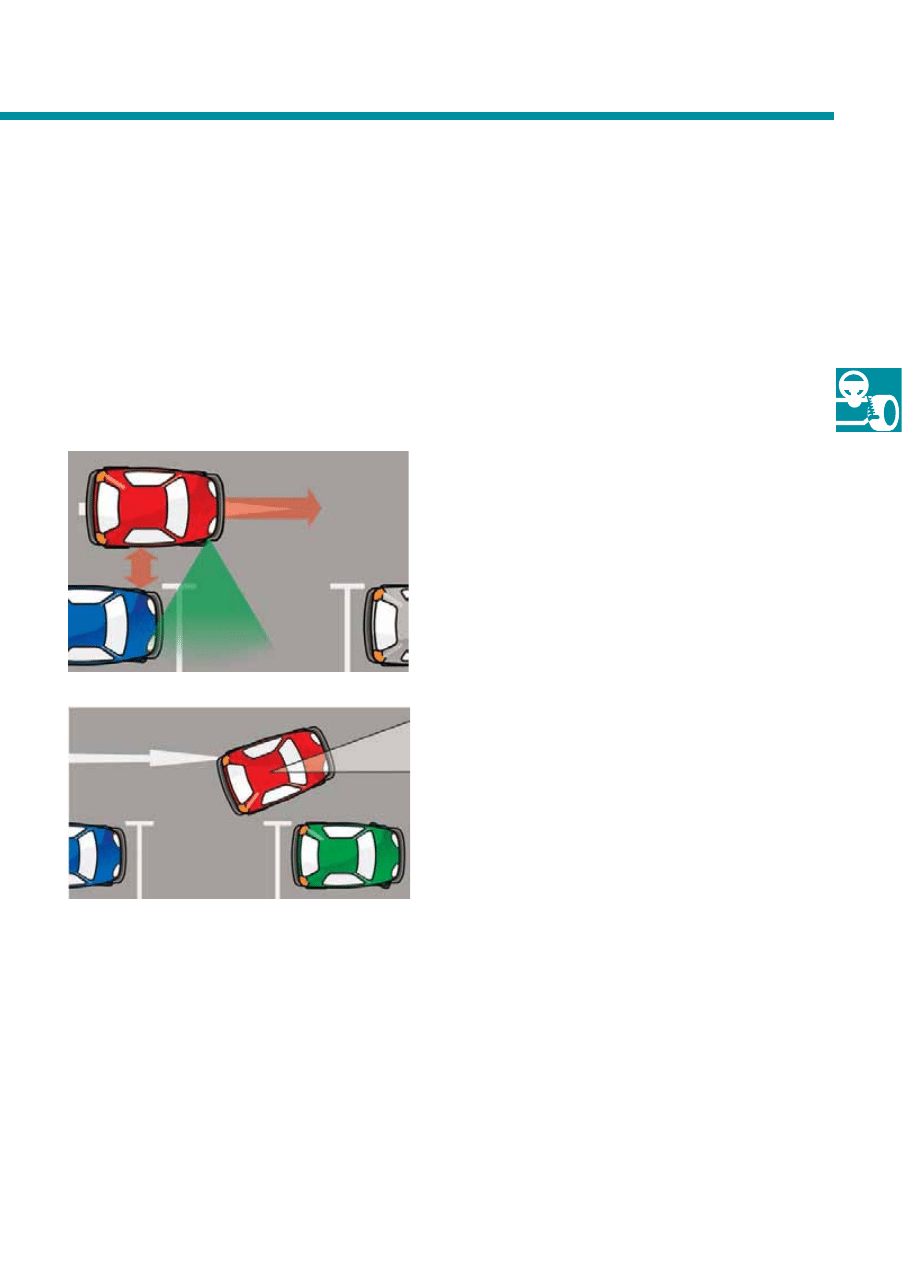
Natomiast układ automatycznego parkowania nie
tylko kontroluje obszar wokół samochodu, ale
i samoczynnie kieruje samochodem podczas
parkowania tyłem. Kierowca musi jedynie obsługiwać
gaz, hamulec i sprzęgło.
Może on jednak w każdej chwili przejąć kontrolę nad
samochodem i przerwać parkowanie samoczynne.
Układ potrafi zaparkować samochód nie tylko przy
prawym krawężniku, ale również przy lewym, co
można wykorzystać np. na ulicach
jednokierunkowych.
Ważna informacja
Układ automatycznego parkowania nie może zastąpić uwagi kierowcy.
Kierowca przez cały czas ponosi pełną odpowiedzialność za swój samochód. Jeżeli zauważy lub
podejrzewa niebezpieczeństwo uszkodzenia innego samochodu lub obiektu, musi odpowiednio
zareagować, przejmując kierowanie samochodem lub zatrzymując go.
S389_019

5
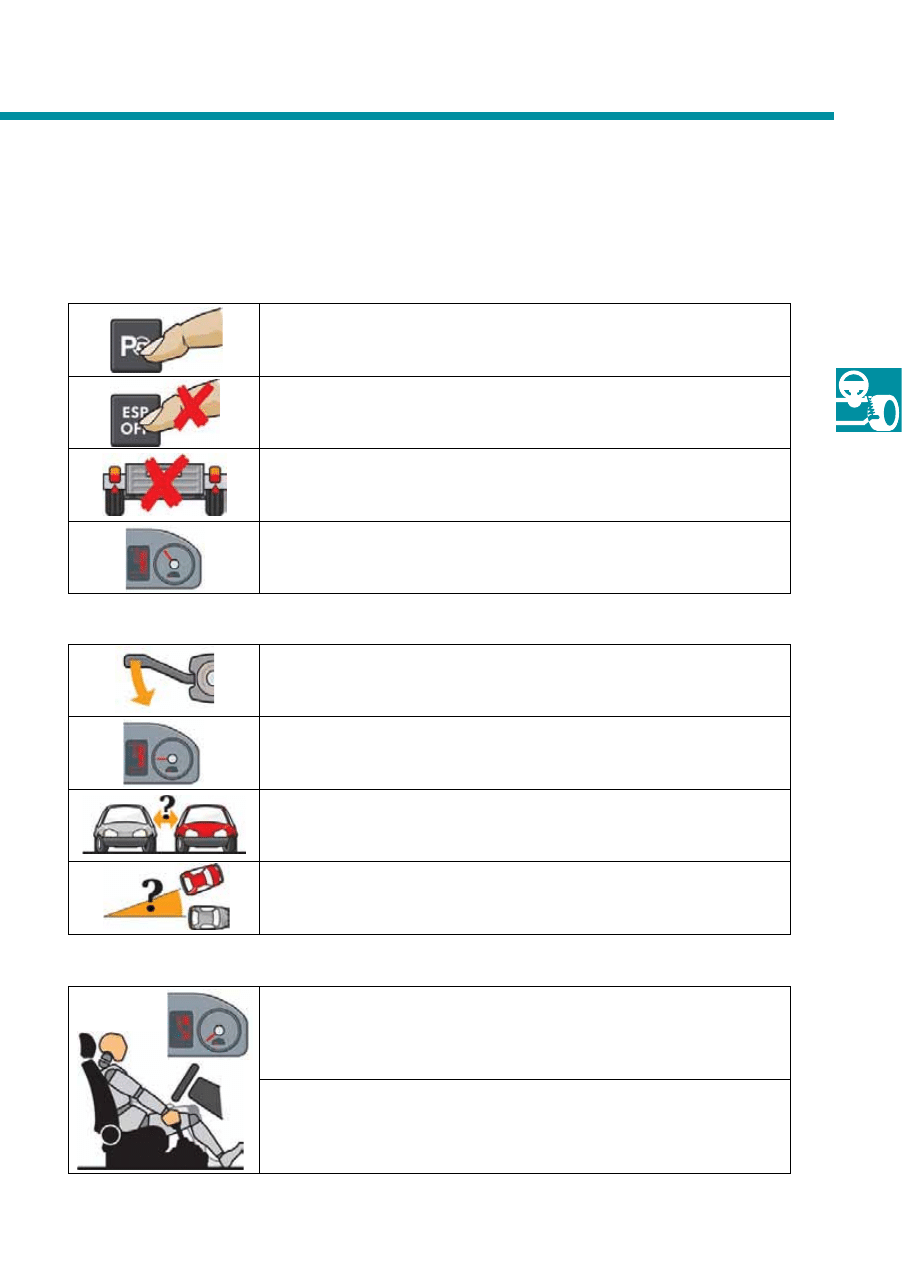
Warunki wyposażenia samochodu
Aby samochód mógł być wyposażony we wspomaganie parkowania, musi mieć:
— elektromechaniczne wspomaganie układu kierowniczego oraz
— układ ESP.
Różnice pomiędzy układem pomocy w parkowaniu a układem automatycznego parkowania
Układ automatycznego parkowania pełni dwie funkcje:
— układu pomocy w parkowaniu (znanego też układem PDC), który jest dostępny również bez funkcji
automatycznego parkowania,
— układu automatycznego parkowania, który samoczynnie kieruje samochodem.
Układ pomocy w parkowaniu (PDC)
Układ mierzy za pomocą czterech czujników
ultradźwiękowych z przodu i czterech z tyłu odległość
od przeszkody przed lub za samochodem. Gdy ta
odległość jest mniejsza od założonej wartości, układ
ostrzega kierowcę dźwiękiem.
Gdy samochód ma tylko układ PDC, za sterowanie
odpowiada sterownik układu pomocy w parkowaniu
J446 (umieszczony najczęściej w bagażniku).
Nie przewiduje się doposażania układu
pomocy w parkowaniu w samochodach,
które mają już układ PDC.
Układ automatycznego parkowania
Ten układ ma – poza czujnikami PDC – dwa
dodatkowe czujniki ultradźwiękowe w przedniej części
samochodu (po jednym z każdej strony), które
kontrolują obszar obok samochodu i szukają luki
nadającej się do zaparkowania.
S389_013
S389_026
S389_014
S389_024
6
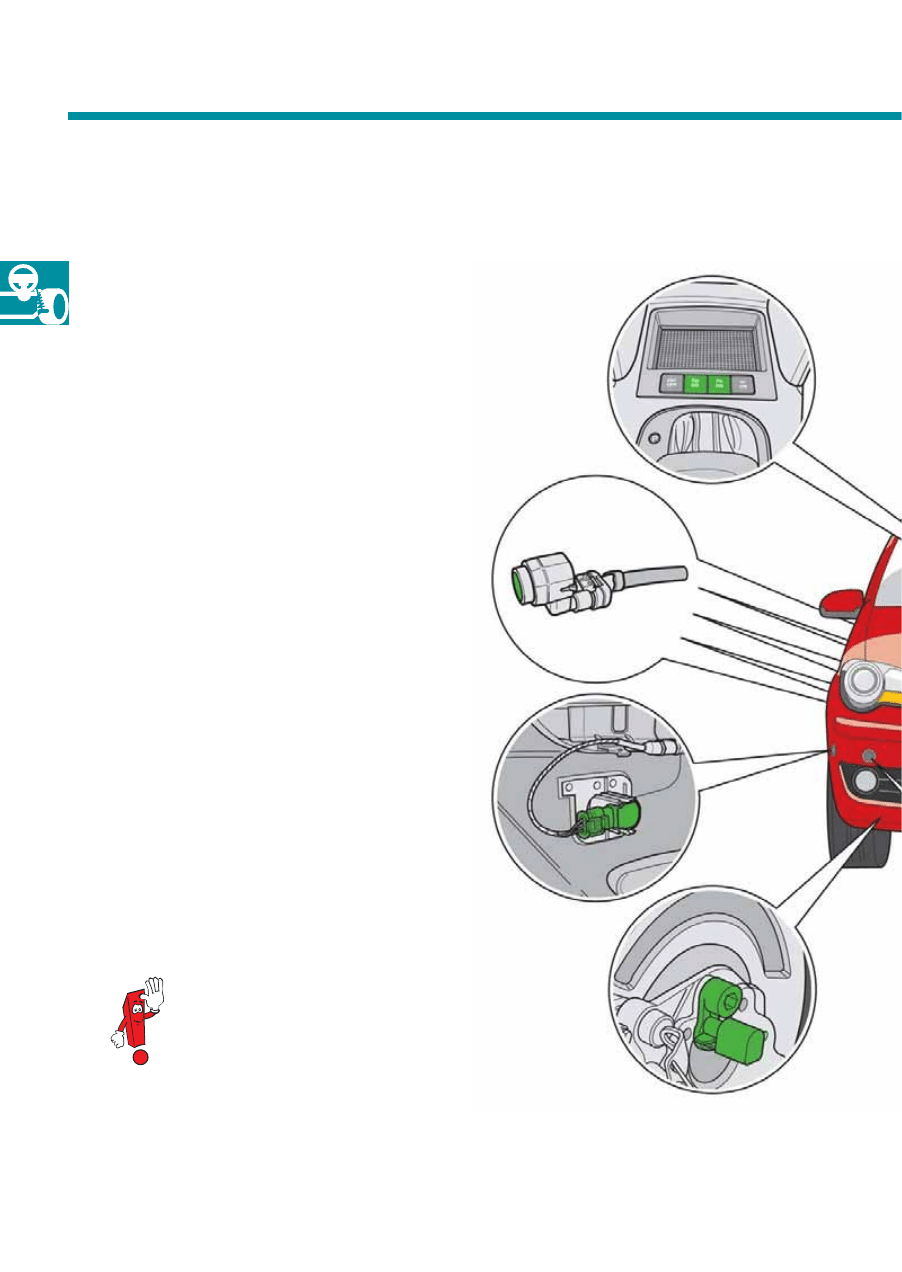
Budowa
Elementy układu i ich lokalizacja
czujnik pomocy
w parkowaniu
tylny lewy,
tylny lewy środkowy,
tylny prawy
środkowy,
tylny prawy
czujniki prędkości obrotowej koła
przykład: prawy przedni
czujnik
automatycznego
parkowania, prawy
przedni,
prawa strona
samochodu
przycisk pomocy w parkowaniu
przycisk automatycznego parkowania
Układ pomocy w parkowaniu debiutuje w Touranie
2007.
Zamieszczony obok rysunek pokazuje – na
przykładzie tego samochodu – rozmieszczenie
wszystkich elementów układu, koniecznych do
realizacji funkcji pomocy w parkowaniu i funkcji
automatycznego parkowania.
Sterownik układu automatycznego parkowania
znajduje się pod tablicą rozdzielczą, po lewej stronie
kolumny kierownicy.
Steruje on obiema funkcjami – pomocą w parkowaniu
i automatycznym parkowaniem. Sterownik jest
podłączony do magistrali CAN napędu.
W samochodach z układem automatycznego
parkowania nie ma zatem sterownika układu pomocy
w parkowaniu.
Ponieważ w różnych modelach samochodów są różne
warunki zabudowy, lokalizacja elementów układu
może być odmienna. Dotyczy to zwłaszcza
sterownika.
Z tego względu należy zawsze posługiwać
się instrukcją naprawy danego modelu
samochodu.
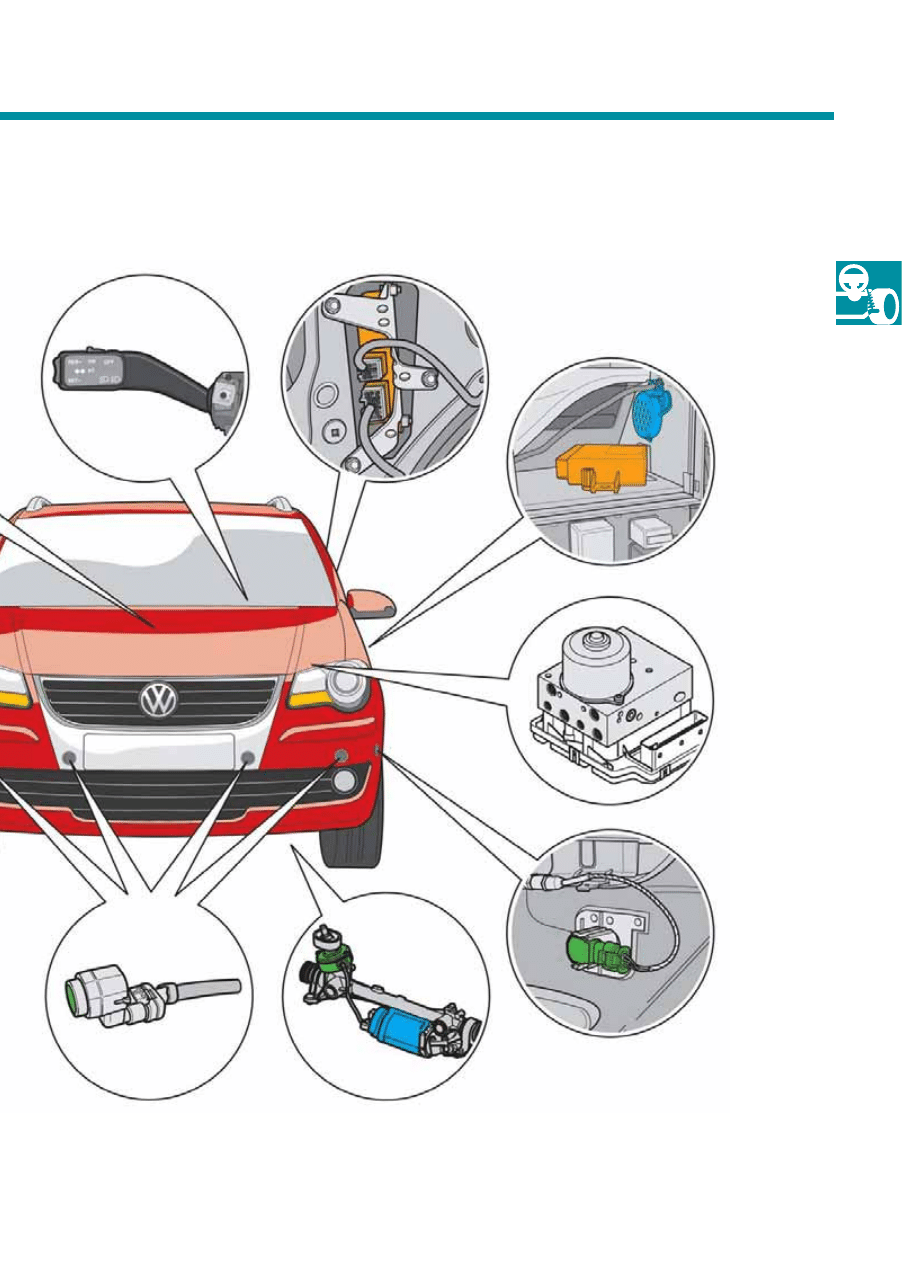
7
czujnik pomocy w parkowaniu
przedni lewy, przedni lewy środkowy,
przedni prawy, przedni prawy
środkowy
elektromechaniczne
wspomaganie układu
kierowniczego
układ hamulcowy
z ABS i ESP
czujnik automatycznego parkowania, lewy przedni,
lewa strona samochodu
brzęczyk pomocy w parkowaniu
sterownik
automatycznego
parkowania
włącznik kierunkowskazów
sterownik świateł przyczepy*
S389_002
* opcja zależna od wyposażenia samochodu
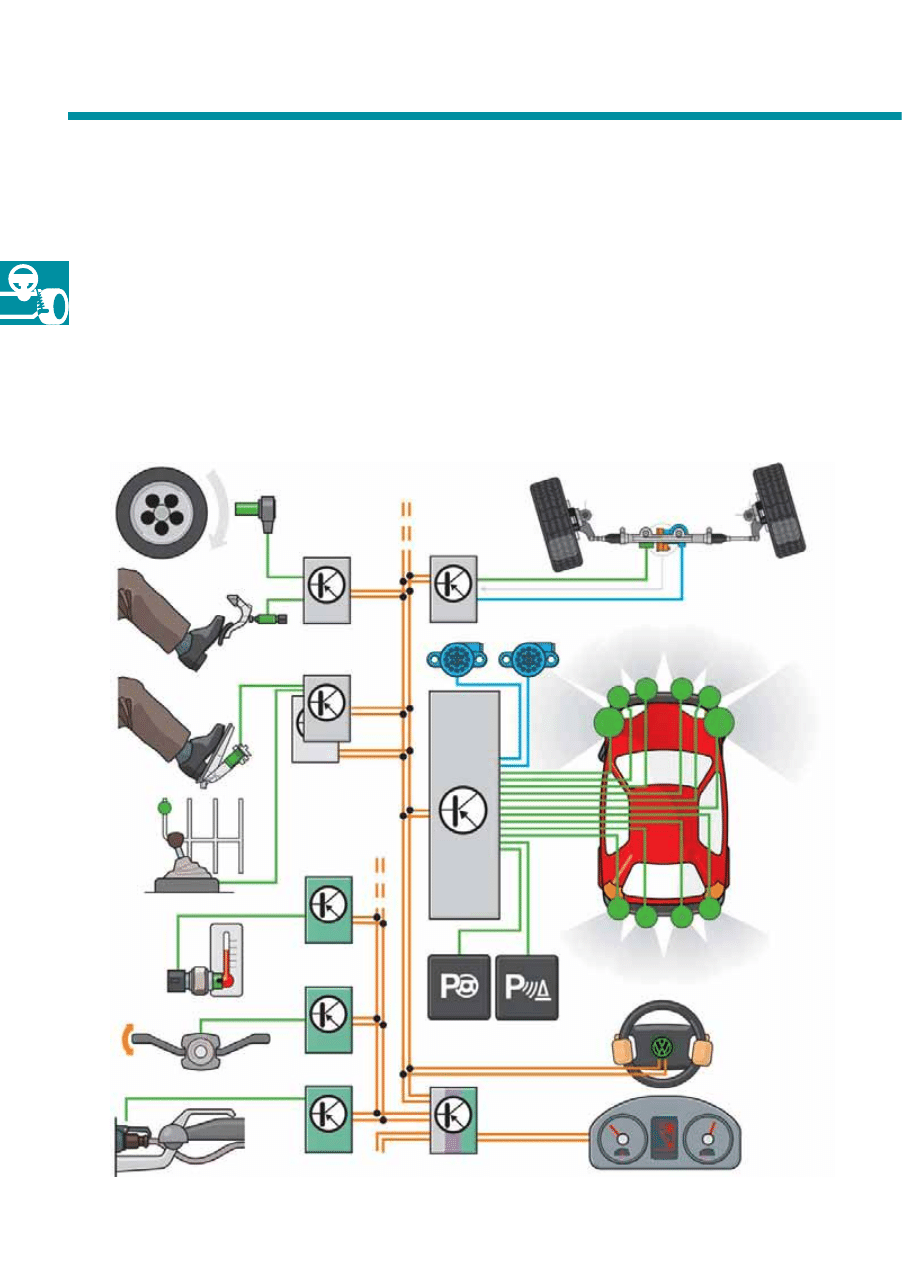
8
Budowa
Schemat układu
Układ automatycznego parkowania jest przykładem współpracy wielu sterowników samochodu w realizacji jednej
funkcji. Wymiana informacji pomiędzy nimi odbywa się przez magistrale CAN.
Oprócz automatycznego parkowania są to następujące układy:
— elektromechaniczne wspomaganie układu kierowniczego,
— układ hamulcowy z ABS i ESP,
— sterowanie silnikiem i skrzynią biegów,
— sterownik zestawu wskaźników i elektronika kolumny kierownicy,
— sterownik świateł przyczepy (jeżeli jest zamontowany).
G44 - G47
J104
J500
J623
J217*
J285
J527
J345
J533
J791
E266
K136
E581
K241
G17
E2
E86
U10
G569
G568
G85
J119
F4
V187
G269
G255
G254
G253
G252
G206
G205
G204
G203
F
S389_001
H15
H22
9
W realizacji funkcji automatycznego parkowania biorą udział poniższe elementy wymienionych układów
samochodu:
Układ automatycznego parkowania
E266
przycisk pomocy w parkowaniu
E581
przycisk automatycznego parkowania
G203 czujnik pomocy w parkowaniu, tylny lewy
G204 czujnik pomocy w parkowaniu,
tylny lewy środkowy
G205 czujnik pomocy w parkowaniu,
tylny prawy środkowy
G206 czujnik pomocy w parkowaniu, tylny prawy
G252
czujnik pomocy w parkowaniu, przedni prawy
G253
czujnik pomocy w parkowaniu,
przedni prawy środkowy
G254
czujnik pomocy w parkowaniu,
przedni lewy środkowy
G255
czujnik pomocy w parkowaniu, przedni lewy
G568
czujnik automatycznego parkowania,
lewy przedni,
lewa strona samochodu
G569
czujnik automatycznego parkowania,
prawy przedni, prawa strona samochodu
H15
brzęczyk układu pomocy w parkowaniu, tylny
H22
brzęczyk układu pomocy w parkowaniu,
przedni
J791
sterownik układu automatycznego
parkowania
K136
lampka kontrolna pomocy w parkowaniu
K241
lampka kontrolna automatycznego
parkowania
Elektromechaniczne wspomaganie układu
kierowniczego
G269
czujnik momentu na kierownicy
J500
sterownik wspomagania kierownicy
V187
silnik elektromechanicznego wspomagania
kierownicy
Układ hamulcowy
G44
czujnik prędkości koła, tylny prawy
G45
czujnik prędkości koła, przedni prawy
G46
czujnik prędkości koła, tylny lewy
G47
czujnik prędkości koła, przedni lewy
G85
czujnik skrętu kierownicy
J104
sterownik ABS
Sterowanie silnikiem i skrzynią biegów
F
włącznik świateł hamowania
F4
włącznik świateł cofania
J217*
sterownik automatycznej skrzyni biegów
J623
sterownik silnika
Zestaw wskaźników i elektronika kolumny
kierownicy
E2
włącznik kierunkowskazów
E86
przycisk wywołania wyświetlacza
wielofunkcyjnego
G17
czujnik temperatury zewnętrznej
J119
wskaźnik wielofunkcyjny
J285
sterownik zestawu wskaźników
J527
sterownik elektroniki kolumny kierownicy
J533
sterownik gateway
Sterownik świateł przyczepy**
J345
sterownik świateł przyczepy
U10
gniazdo przyczepy
* tylko samochody z automatyczną skrzynią biegów
** tylko w samochodach z zaczepem holowniczym
i sterownikiem świateł przyczepy
CAN napędu
CAN komfortu
CAN Infotainment
czujnik, sygnał wejściowy
element wykonawczy, sygnał wyjściowy
przewód magistrali CAN
10
Budowa
Elektromechaniczne wspomaganie układu kierowniczego
Obecność elektromechanicznego wspomagania układu kierowniczego jest podstawowym warunkiem, który
pozwala wyposażyć samochód w układ automatycznego parkowania.
Dzięki elektrycznemu napędowi przekładni kierowniczej sterownik pomocy w parkowaniu może samoczynnie
kierować samochodem.
Poniżej przedstawiamy podstawowe informacje na temat budowy i zasady działania elektromechanicznego
wspomagania układu kierowniczego.
Dokładne informacje można znaleźć w zeszycie
nr 317 „Elektromechaniczne wspomaganie układu
kierowniczego z dwoma zębnikami”.
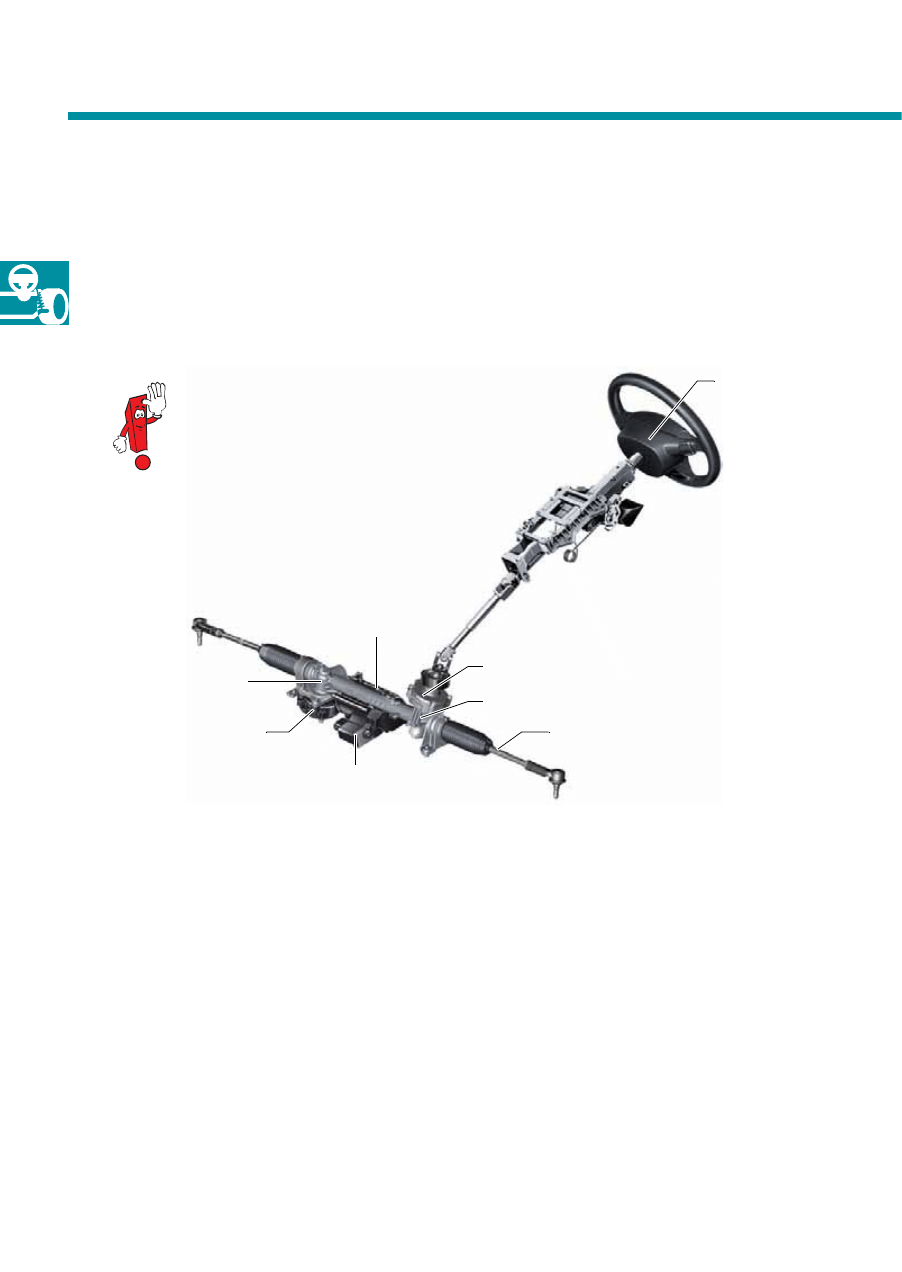
Elektromechaniczne wspomaganie układu
kierowniczego stanowi alternatywę dla wspomagania
hydraulicznego.
Podstawowymi elementami tego układu są:
przekładnia kierownicza, elektryczny silnik
wspomagający, czujnik momentu na kierownicy oraz
sterownik. Cechą szczególną przekładni kierowniczej
jest obecność dwóch zębników. Pierwszy zębnik (1)
przenosi napęd z kierownicy na zębatkę przekładni
kierowniczej. Czujnik momentu na kierownicy mierzy
wtedy moment, jakie kierowca przykłada do
kierownicy.
Drugi zębnik (2) przenosi napęd z silnika
wspomagającego na zębatkę przekładni, a stąd na
drążki kierownicze.
Sterownik wspomagania kierownicy znajduje się
bezpośrednio przy silniku wspomagającym, tak że
układ jest pozbawiony skomplikowanej instalacji
elektrycznej. Czujnik skrętu kierownicy informuje
sterownik o położeniu kierownicy oraz o prędkości jej
skręcania. Te informacje czujnik wysyła bezpośrednio
magistralą CAN napędu, tak że mogą z nich
korzystać i inne sterowniki (np. sterownik ESP).
kolumna kierownicy
zębnik (1)
czujnik momentu na kierownicy G269
zębnik (2)
sterownik wspomagania
kierownicy J500
przekładnia kierownicza
silnik elektromechanicznego
wspomagania kierownicy V187
S389_003
drążek kierowniczy
czujnik skrętu
kierownicy G85
11
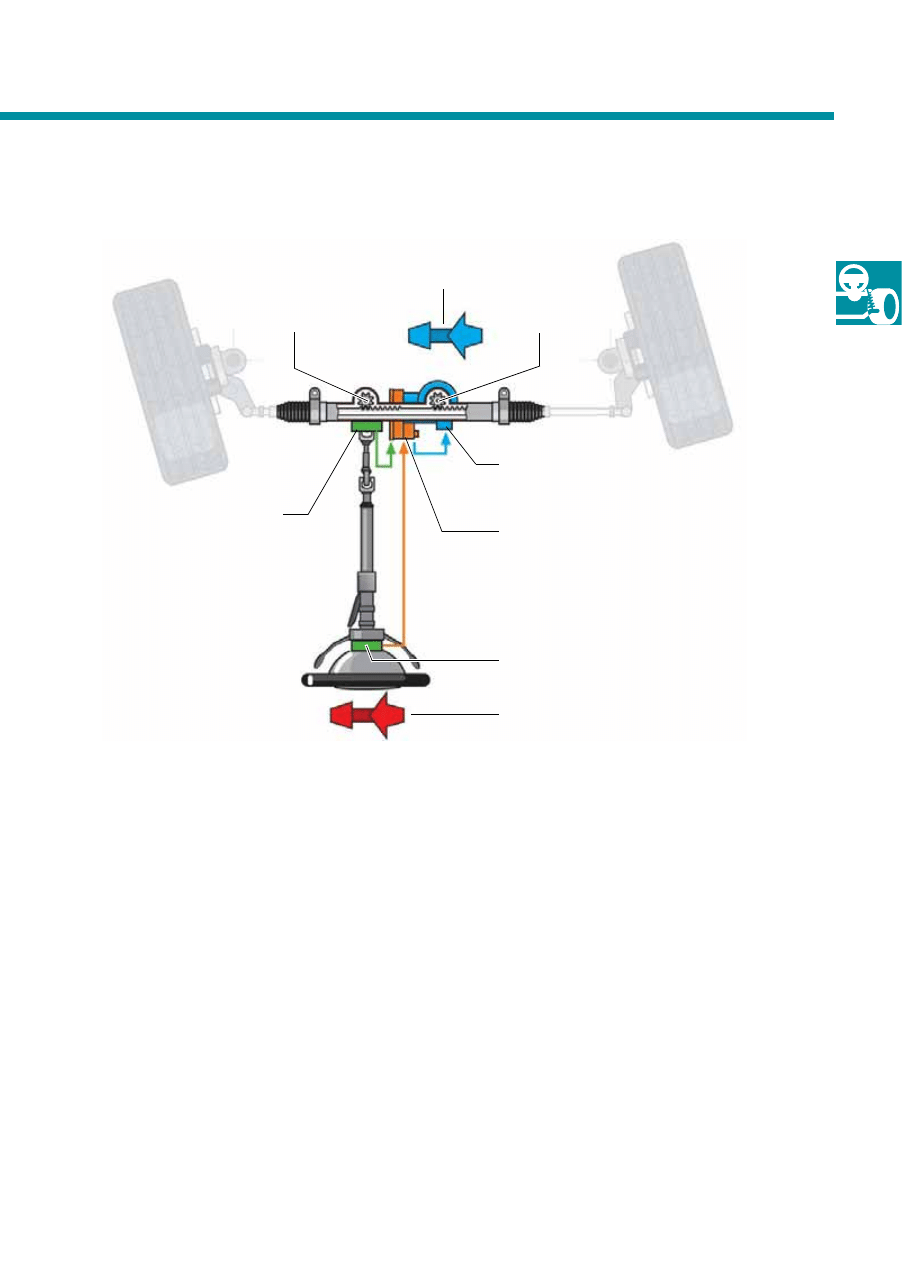
Zasada działania wspomagania układu kierowniczego
Działanie układu wspomagającego rozpoczyna się
w chwili, gdy kierowca zaczyna skręcać kierownicę.
Moment obrotowy, który przykłada wtedy do
kierownicy, powoduje skręcenie wałka skrętnego
w przekładni kierowniczej. Czujnik momentu na
kierownicy mierzy to skręcenie i przekazuje
informację do sterownika wspomagania kierownicy.
Równocześnie sterownik oblicza – na podstawie
sygnału czujnika skrętu kierownicy – jak szybko
kierowca skręca kierownicę i w jakim położeniu
znajdują się aktualnie koła.
Z tych informacji sterownik wylicza niezbędny moment
wspomagający i na podstawie zapisanych
charakterystyk wysterowuje silnik elektryczny. Silnik
wytwarza moment wspomagający, przenoszony przez
zębnik 2 na zębatkę przekładni kierowniczej.
S389_004
moment przykładany przez
kierowcę
moment wspomagający
zębnik 1
zębnik 2
silnik elektromechanicznego
wspomagania kierownicy
sterownik wspomagania
kierownicy
czujnik skrętu kierownicy
czujnik momentu na
kierownicy
12
Zasada działania układu automatycznego parkowania
Przebieg parkowania
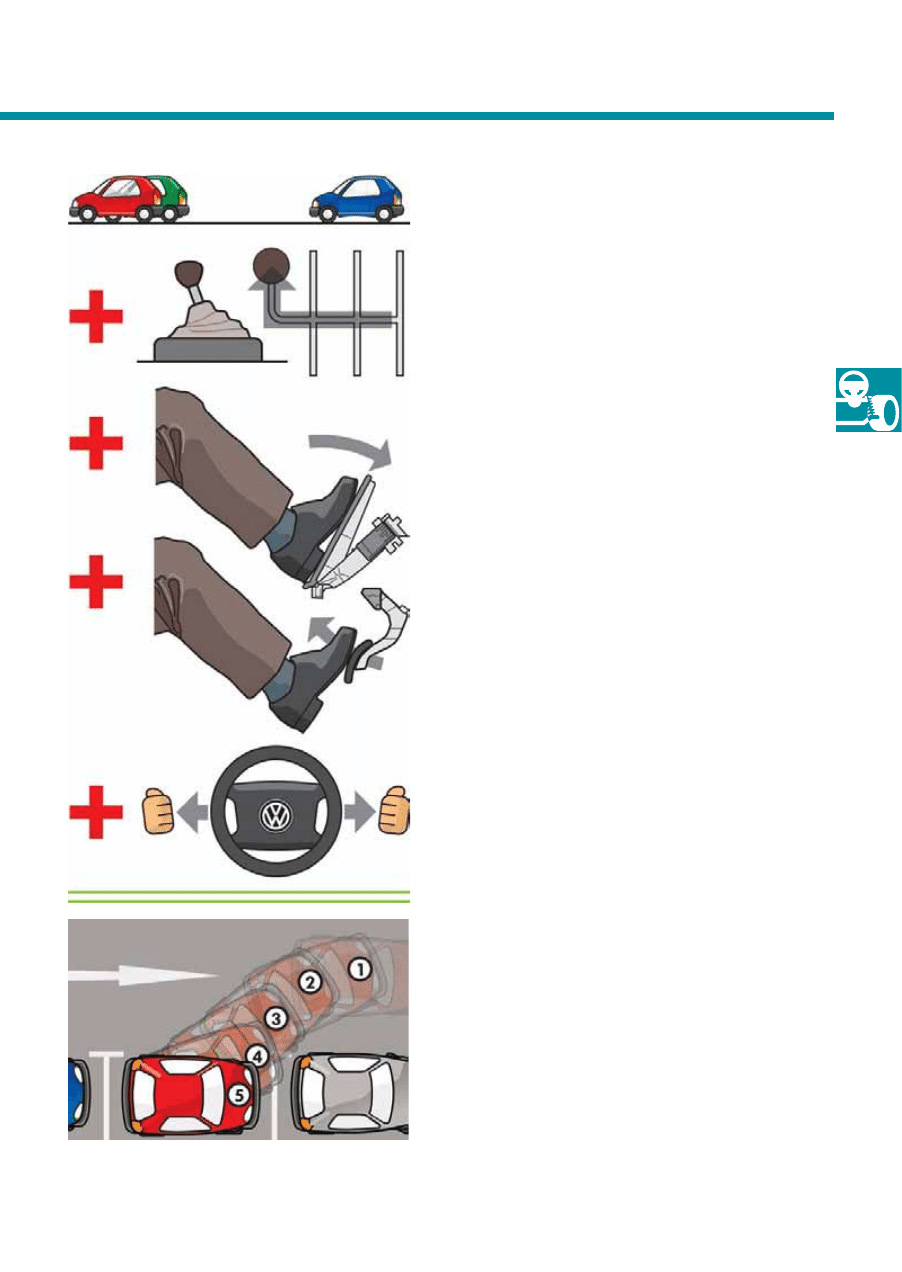
Parkowanie z użyciem układu automatycznego parkowania można podzielić na cztery etapy:
1. Włączenie układu automatycznego parkowania.
2. Szukanie odpowiedniej luki do zaparkowania.
3. Parkowanie z wykorzystaniem funkcji automatycznego parkowania.
4. Zakończenie parkowania.
1. Włączenie układu automatycznego parkowania
Układ automatycznego parkowania pełni dwie
funkcje – pomocy w parkowaniu i automatycznego
parkowania. Obie można włączyć bądź wyłączyć
osobnymi przyciskami. Aktywność funkcji jest
sygnalizowana lampką kontrolną w przycisku oraz
komunikatem na wyświetlaczu wielofunkcyjnym
zestawu wskaźników.
Na samym początku kierowca musi więc zdecydować,
czy będzie parkował samodzielnie, wykorzystując
tylko czujniki pomocy w parkowaniu do kontroli
odległości, czy też chce zlecić zaparkowanie
układowi automatycznego parkowania. W tym
drugim przypadku będzie musiał obsługiwać tylko
pedał gazu, pedał hamulca i pedał sprzęgła.
Ponadto kierowca musi rozstrzygnąć, czy będzie
parkować tyłem przy prawym, czy przy lewym
krawężniku jezdni. Możliwe jest również
wykorzystanie funkcji automatycznego parkowania
wyłącznie do znalezienia wystarczająco dużej luki.
W tym przypadku należy wyłączyć tę funkcję po
zakończeniu pomiaru.
W tej części opisu zakładamy, że kierowca nacisnął
przycisk automatycznego parkowania i chce
wykorzystać tę funkcję do zaparkowania przy
prawym krawężniku.
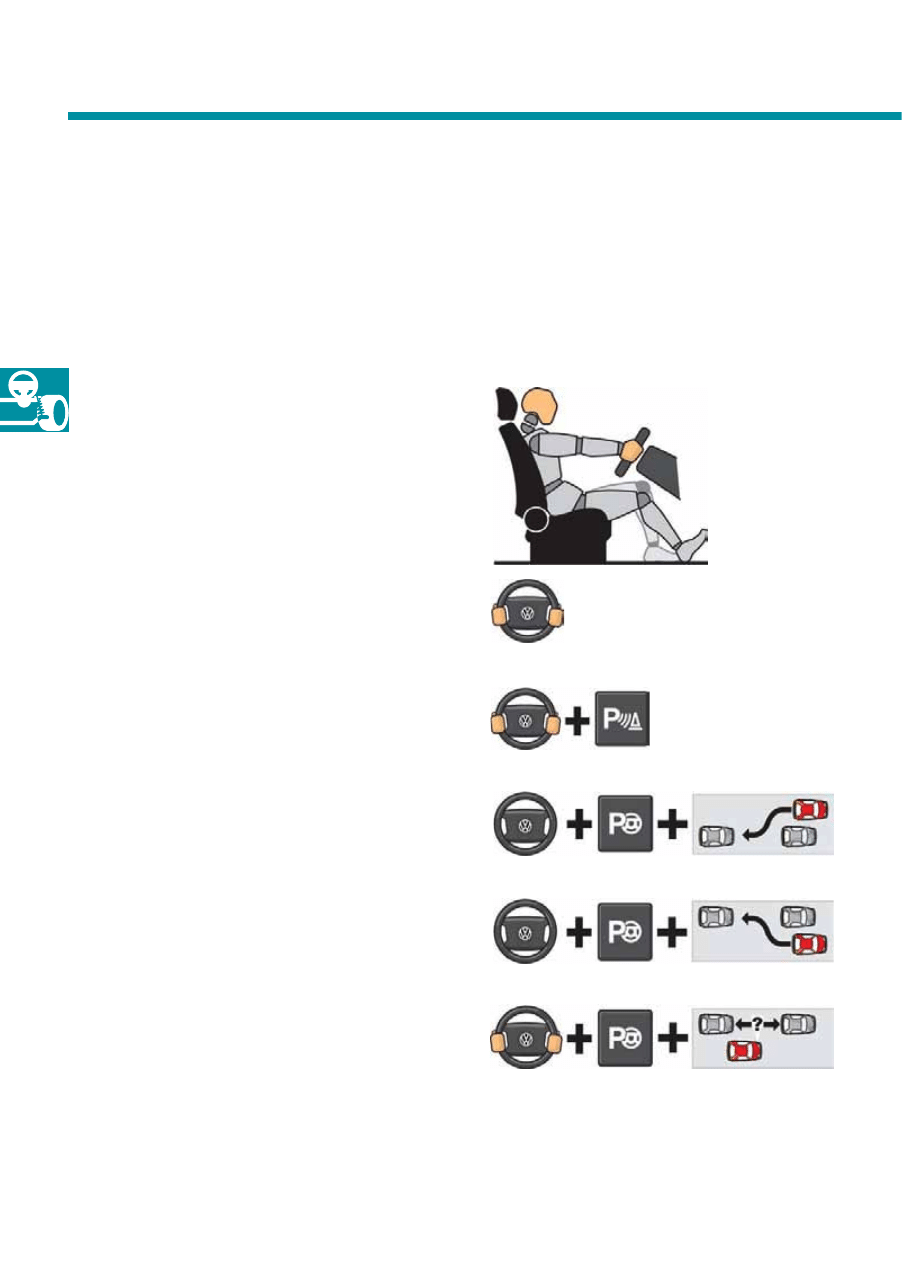
Możliwości wyboru, jakie ma kierowca
ręczne parkowanie
bez układów wspomagających
ręczne parkowanie
z funkcją pomocy w parkowaniu
automatyczne parkowanie,
tyłem, po prawej stronie
automatyczne parkowanie,
tyłem, po lewej stronie
ręczne parkowanie,
funkcja automatycznego parkowania tylko
do pomiaru długości luki
S389_027
S389_028, 029, 030, 047, 031,
13
2. Szukanie odpowiedniej luki do zaparkowania
Do pomiaru długości luki wykorzystywany jest jeden
czujnik ultradźwiękowy po odpowiedniej stronie
samochodu. W naszym przypadku jest to prawy
czujnik automatycznego parkowania (po prawej
stronie samochodu). Aby układ mógł zmierzyć
długość luki, samochód musi jechać z prędkością
poniżej 30km/h. Pomiędzy 30km/h a 45km/h czujnik
automatycznego parkowania jest nieaktywny.
Sterownik przechodzi w tryb stand-by, ponieważ
zakłada, że kierowca tylko chwilowo przerwał
poszukiwanie miejsca do zaparkowania i będzie je
kontynuował w innym miejscu.
Gdy prędkość jazdy przekroczy 45km/h, układ
wyłącza się całkowicie. Jego uruchomienie wymaga
ponownego naciśnięcia przycisku.
Gdy prędkość jazdy spadnie poniżej 30km/h
i odległość od sąsiednich samochodów wynosi
0,5 – 1,5m, układ automatycznego parkowania
zaczyna badać prawą stronę w poszukiwaniu miejsca
do zaparkowania. Aktualny wynik pomiarów ukazuje
się na wyświetlaczu wielofunkcyjnym w postaci
schematycznego obrazu samochodu i prawej strony
jezdni.
Jeżeli podczas poszukiwania luki sterownik stwierdzi,
że samochód ustawił się pod kątem ponad 20° do
linii zaparkowanych samochodów lub do linii
krawężnika, przerywa poszukiwania, gdyż wychodzi
z założenia, że kierowca chce skręcić w inną ulicę.
Do oceny kąta ustawienia samochodu sterownik może wykorzystać wiele linii:
1. linię, którą tworzą już zaparkowane samochody,
2. linię krawężnika,
3. mur lub ścianę domu.
Sterownik zawsze wybiera tę linię, która jest najbliżej samochodu. W ten sposób unika nieprawidłowej oceny
takich sytuacji, jak np. nierównoległy przebieg ściany domu i krawężnika.
< 20
0,5m < a < 1,5m
< 30km/h
S389_025
S389_032

14
Zasada działania układu automatycznego parkowania
Jak długo sterownik nie zauważy luki wystarczającej
do zaparkowana samochodu, prawa strona jezdni
jest pokazywana jako szereg zakreskowanych
prostokątów. Gdy luka jest wystarczająco duża,
na wyświetlaczu ukazuje się wolne pole pomiędzy
prostokątami. Równocześnie układ sprawdza,
czy samochód jest w odpowiedniej pozycji względem
luki, by rozpocząć parkowanie. Odpowiednia pozycja
oznacza, że samochód znajduje się wystarczająco
daleko za luką oraz równolegle do niej lub do
krawędzi jezdni.
Osiągnięcie przez samochód odpowiedniej pozycji
do rozpoczęcia parkowania układ sygnalizuje
wyświetleniem strzałki, pokazującej drogą
parkowania.
Może to jednak nastąpić dopiero wtedy, gdy
samochód się zatrzyma.
Litera R na sylwetce samochodu przypomina
kierowcy, że należy włączyć wsteczny bieg.
Minimalna długość luki jest określona przez długość
samochodu, miejsce konieczne do manewrowania
oraz zapas bezpieczeństwa. Jest ona dobierana tak,
że samochód można zaparkować jednym manewrem.
Oznacza to, że układ automatycznego parkowania
zaparkuje samochód tak, że kierowca będzie musiał
potem co najwyżej podjechać troszkę do przodu, by
ustawić samochód pośrodku luki.
Komunikat na
wyświetlaczu oznacza:
nie znaleziono
wystarczającej luki.
Komunikat na
wyświetlaczu oznacza:
znaleziono wystarczającą
lukę, poprawić pozycję
samochodu.
miejsce do
manewrowania
i zapas
bezpieczeństwa –
ok. 60-70cm
miejsce do
manewrowania
i zapas
bezpieczeństwa –
ok. 60-70cm
Komunikat na wyświetlaczu oznacza:
prawidłowa pozycja samochodu;
można rozpocząć parkowanie.
S389_021
S389_022
S389_023
S389_033
15
3. Parkowanie z wykorzystaniem funkcji
wspomagania
Automatyczne parkowanie rozpoczyna kierowca,
włączając w stojącym samochodzie wsteczny bieg,
dodając gazu i zwalniając pedał hamulca. Podczas
całego manewru nie wolno mu przykładać żadnego
momentu do kierownicy.
Na wyświetlaczu zestawu wskaźników pojawia się
komunikat informujący kierowcę o rozpoczęciu przez
układ kierowania samochodem i oraz konieczności
obserwowania otoczenia samochodu. W razie
niebezpieczeństwa lub wątpliwości kierowca musi
przerwać automatyczne parkowanie lub zakończyć je
samodzielnie.
Wyświetlany wtedy komunikat brzmi:
„Lenkeingriff aktiv! Umfeld beachten!”
(„Kierowanie aktywne! Obserwować otoczenie!”).
Dla sterownika cofanie samochodu podczas
parkowania składa się pięciu kroków. Jest to
konieczne, gdyż układ nie ma kontroli optycznej,
która pozwalałaby mu indywidualnie reagować na
rozwój wydarzeń. Ma on po prostu wpisany w pamięć
standardowy przebieg parkowania, który w razie
potrzeby odtwarza w pięciu krokach.
Układ przemieszcza więc samochód wzdłuż drogi,
wytyczonej dla kolejnych kroków.
v =
0km/h
S389_035
S389_036
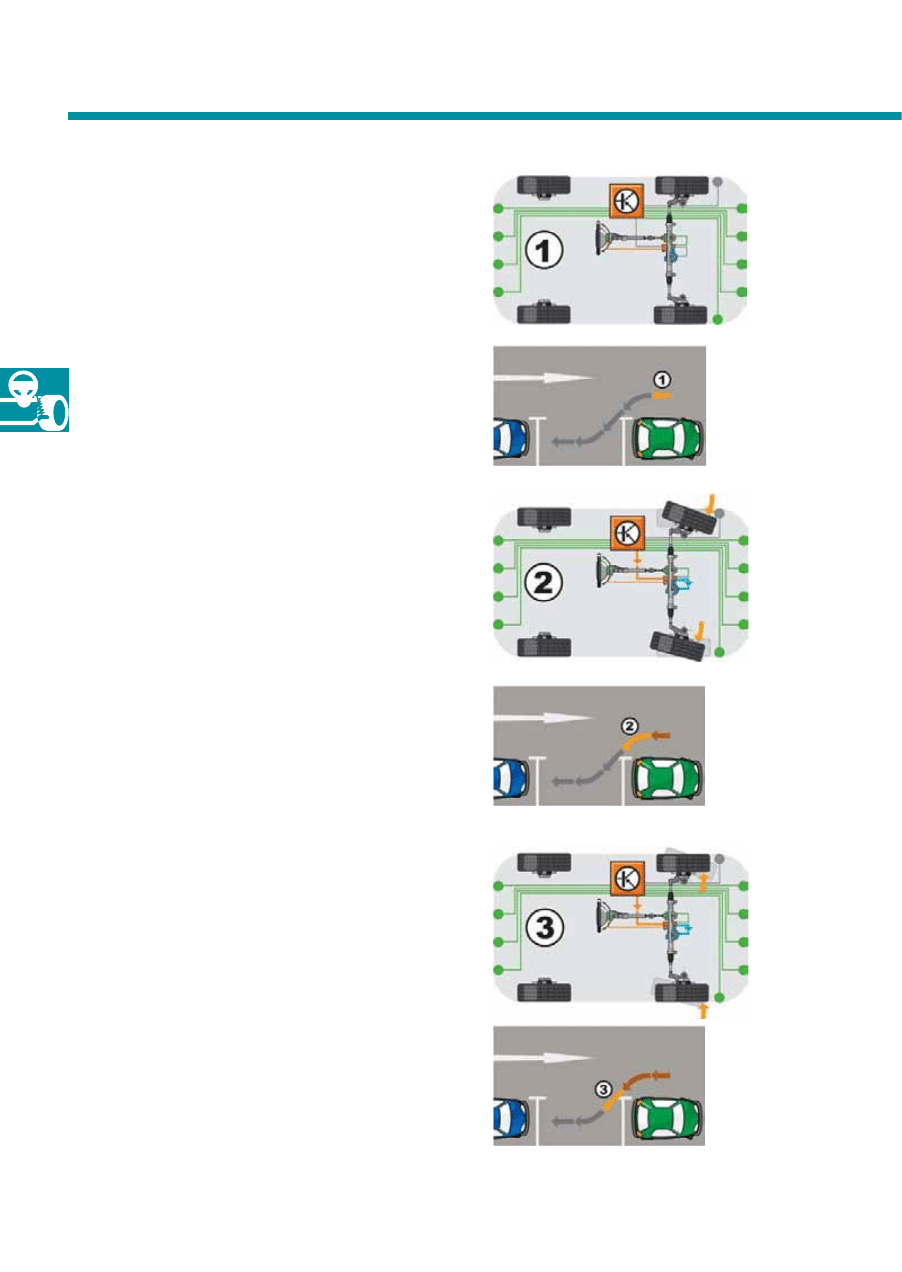
16
Zasada działania układu automatycznego parkowania
Najpierw układ ustawia koła na wprost i – gdy
kierowca zwolni hamulce oraz doda gazu –
samochód cofa się nieco.
Następnie sterownik automatycznego parkowania
wydaje polecenie sterownikowi wspomagania
kierownicy, by ten za pomocą silnika elektrycznego
skręcił koła w prawo.
Samochód zaczyna wjeżdżać skosem w lukę.
Kierowca musi w tym czasie utrzymywać prędkość
poniżej 7km/h.
Jeżeli prędkość wzrośnie powyżej tej granicy, układ
przerywa manewr.
Na podstawie sygnałów czujników ultradźwiękowych
oraz sygnału czujnika skrętu kierownicy sterownik
pomocy w parkowaniu sprawdza ustawienie
samochodu względem luki.
Następnie – wykorzystując zapisane w pamięci
kolejne kroki manewru – ustala, w którym momencie
należy wyprostować koła, by samochód dalej
wjeżdżał w lukę.
J791
G269
V187
J500
G85
J791
J500
V187
J791
J500
V187
Sterowanie:
krok 1
Parkowanie
krok 1
Sterowanie:
krok 2
Parkowanie
krok 2
Sterowanie:
krok 3
Parkowanie
krok 3
S389_038
S389_037
S389_040
S389_039
S389_042
S389_041
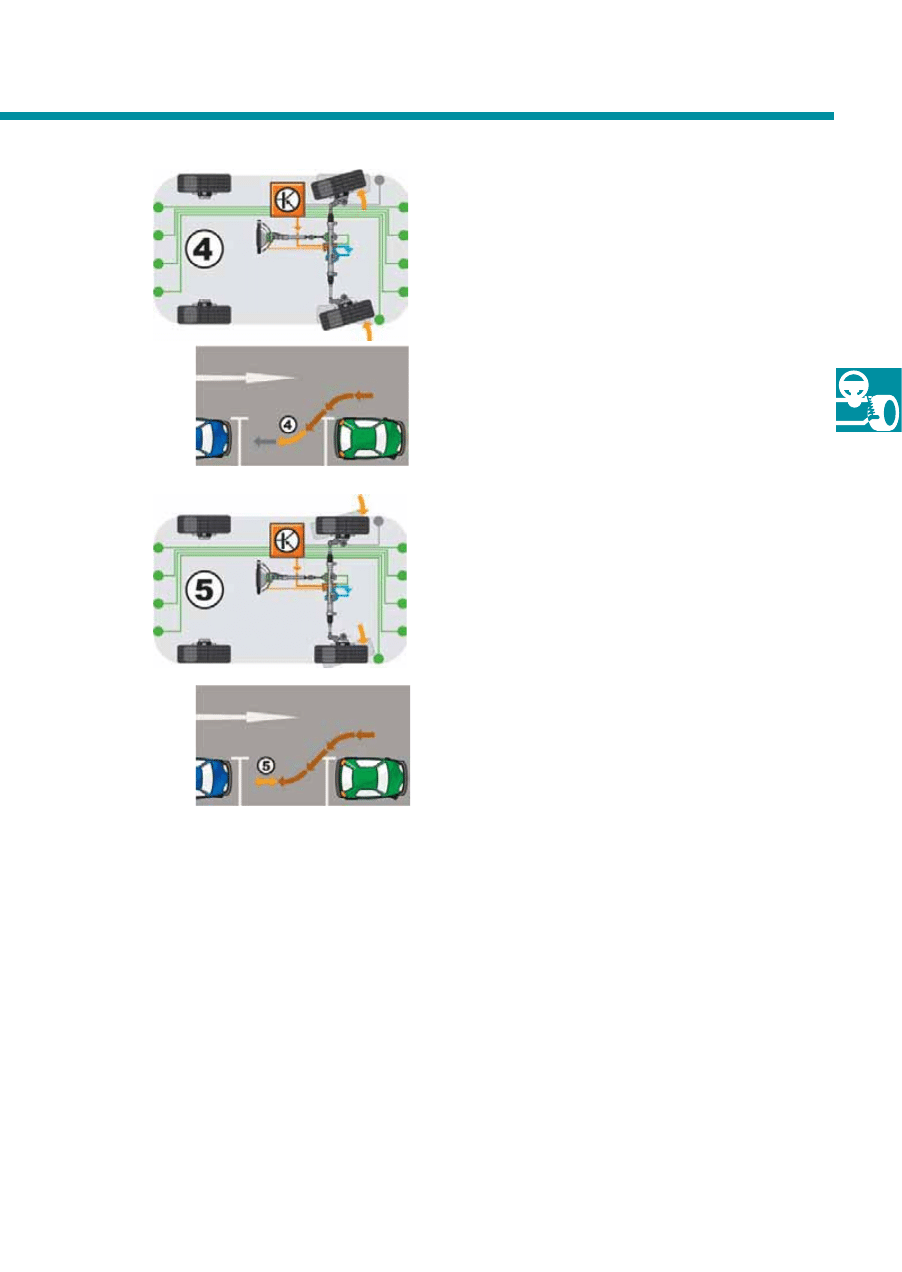
17
Po zakończeniu trzeciego kroku rozpoczyna się krok
czwarty. Teraz koła muszą zostać skręcone w lewo, by
samochód ustawił się równolegle do krawężnika.
Samochód prostuje się, zajmując pozycję równoległą
do jezdni.
Zbytnie zbliżenie się do obiektu za samochodem
sygnalizuje układ pomocy w parkowaniu. Jest to
znana sygnalizacja akustyczna.
4. Zakończenie parkowania
Układ automatycznego parkowania rozpoznaje też
sytuację, gdy samochód po zakończeniu manewru nie
stoi całkowicie równolegle do krawężnika lub ściany
budynku.
Kierowca musi teraz wyłączyć wsteczny bieg,
poczekać, aż koła ustawią się na wprost, i włączyć
bieg pierwszy.
Teraz można podjechać nieco do przodu, aż na
wyświetlaczu pojawi się komunikat o zakończeniu
parkowania.
Gdy z punktu widzenia układu automatycznego
parkowania manewr zostanie zakończony, komunikat
na wyświetlaczu zmienia się z „Lenkeingriff aktiv!
Umfeld beachten!” na „Park Assist beendet!”
(„Automatyczne parkowanie zakończone!”). Funkcja
automatycznego parkowania zostaje wyłączona
i lampka kontrolna w przycisku gaśnie.
Sterowanie:
krok 4
Parkowanie
krok 4
Sterowanie:
krok 5
Parkowanie
krok 5
J791
J500
V187
J791
J500
V187
Oznaczenia
G85
czujnik skrętu kierownicy
G269
czujnik momentu na kierownicy
J791
sterownik układu automatycznego parkowania
J500
sterownik wspomagania kierownicy
V187
silnik elektromechanicznego wspomagania kierownicy
S389_044
S389_043
S389_046
S389_045
18
Zasada działania układu automatycznego parkowania
Szczególne cechy parkowania przy lewej krawędzi
jezdni
Na ulicach jednokierunkowych lub parkingach istnieje
często możliwość parkowania przy lewej krawędzi
jezdni. Dlatego układ automatycznego parkowania
ma również po lewej stronie samochodu czujnik
ultradźwiękowy, służący do pomiaru wielkości luki
i do zaparkowania samochodu tyłem przy lewym
krawężniku.
Aby układ wiedział, po której stronie jezdni kierowca
chce szukać luki do zaparkowania, trzeba mu o tym
powiedzieć. Układ nie może bowiem badać
i pokazywać otoczenia jednocześnie po obu stronach
samochodu.
Układ automatycznego parkowania zakłada zawsze,
że kierowca chce szukać miejsca po prawej stronie
jezdni. W takiej sytuacji nie potrzebuje od kierowcy
żadnych informacji.
Gdy natomiast kierowca chce zaparkować po lewej
stronie, musi – po naciśnięciu przycisku
automatycznego parkowania – włączyć lewe
kierunkowskazy. Powoduje to przełączenie układu.
Sterownik wykorzystuje wtedy drugi zapamiętany
zestaw kroków, składających się na manewr
parkowania.
Opisany przebieg obowiązuje tylko dla
krajów o ruchu prawostronnym. Bliższe
informacje na ten temat podano
w rozdziale Serwis.
Granice możliwości układu
Warunki otoczenia mają wpływ na pomiar wielkości luki i na przebieg parkowania.
Układ ma na przykład trudności z rozpoznaniem
krawężnika, gdy leżące liście, śmieci lub śnieg
zacierają jego kontur. Ponadto liście i śnieg bardzo
silnie rozpraszają ultradźwięki, wysyłane przez
czujniki. W takiej sytuacji sterownik odbiera tylko
bardzo słabe echo wysyłanych sygnałów i może je
niewłaściwie interpretować.
Innym przykładem ograniczeń są skrzyżowania
i wyjazdy z posesji. Co dla układu jest dogodnym
miejscem do zaparkowania samochodu, przy
dokładniejszej ocenie może się okazać wyjazdem
z posesji z zamkniętą bramą.
Te ograniczenia uwidaczniają, że układ pomocy w parkowaniu nie może zastępować uwagi kierowcy.
Odpowiedzialność leży zawsze po stronie kierowcy.
S389_048
19
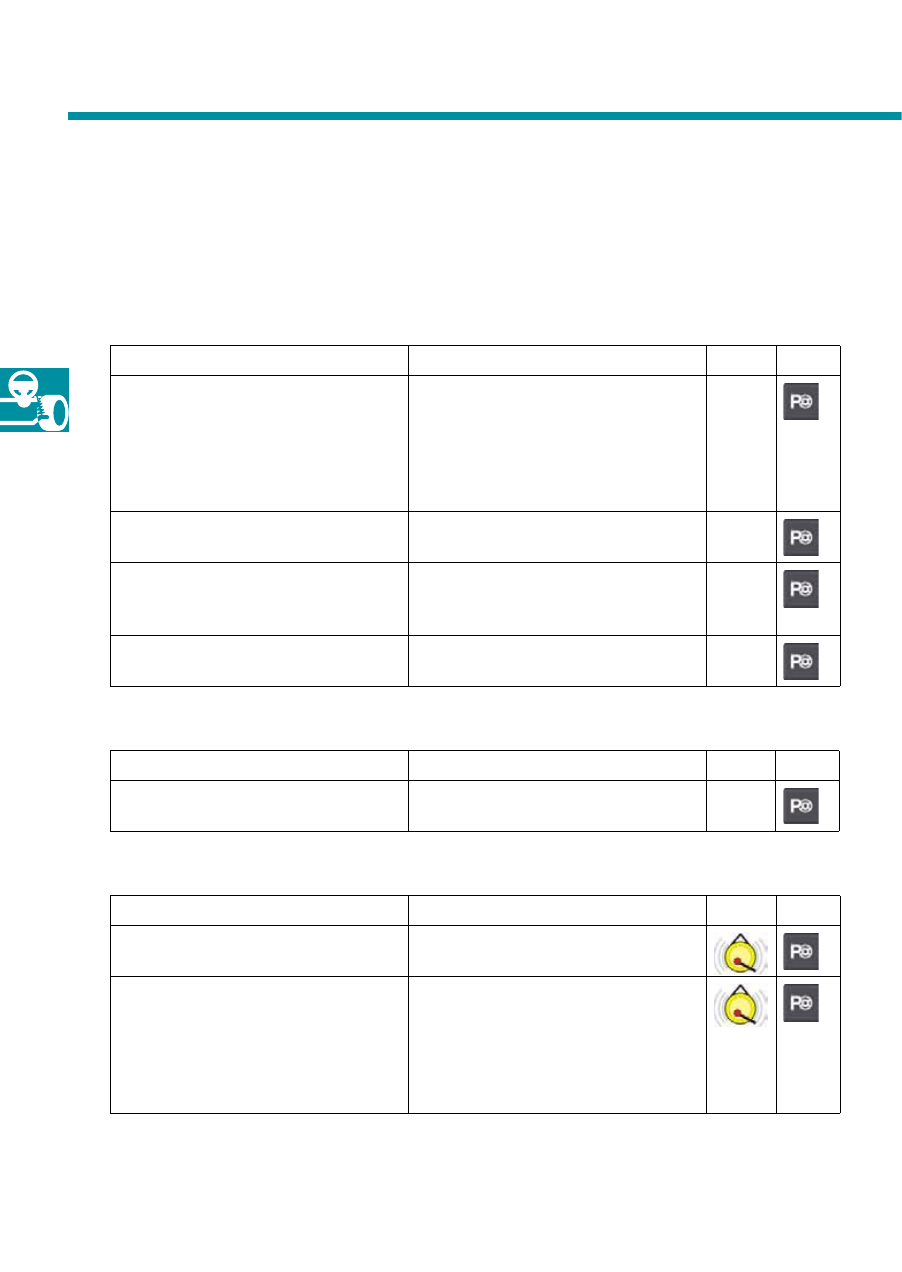
włączone lewe kierunkowskazy
(dotyczy krajów o ruchu prawostronnym)
prędkość jazdy poniżej 30km/h
odstęp od sąsiednich samochodów 0,5 – 1,5m
kąt pomiędzy osią samochodu a linią zaparkowanych samochodów lub
krawędzią jezdni maks. 20°
naciśnięty przycisk automatycznego parkowania
aktywna funkcja ESP
niepodłączona przyczepa
prędkość jazdy poniżej 45km/h
prędkość jazdy = 0km/h oraz
włączony wsteczny bieg oraz
moment na kierownicy poniżej 5Nm
czynności, za które odpowiada kierowca (gaz, sprzęgło, hamulec), wykonane
w założonym czasie (180s)
Poszukiwanie luki po prawej lub lewej stronie
Aby dało się korzystać z funkcji automatycznego parkowania, muszą być spełnione następujące warunki:
Włączenie funkcji automatycznego parkowania
Parkowanie tyłem przy prawej lub lewej krawędzi jezdni
Warunki włączenia układu
S389_061 do S389_070
20
Zasada działania układu automatycznego parkowania
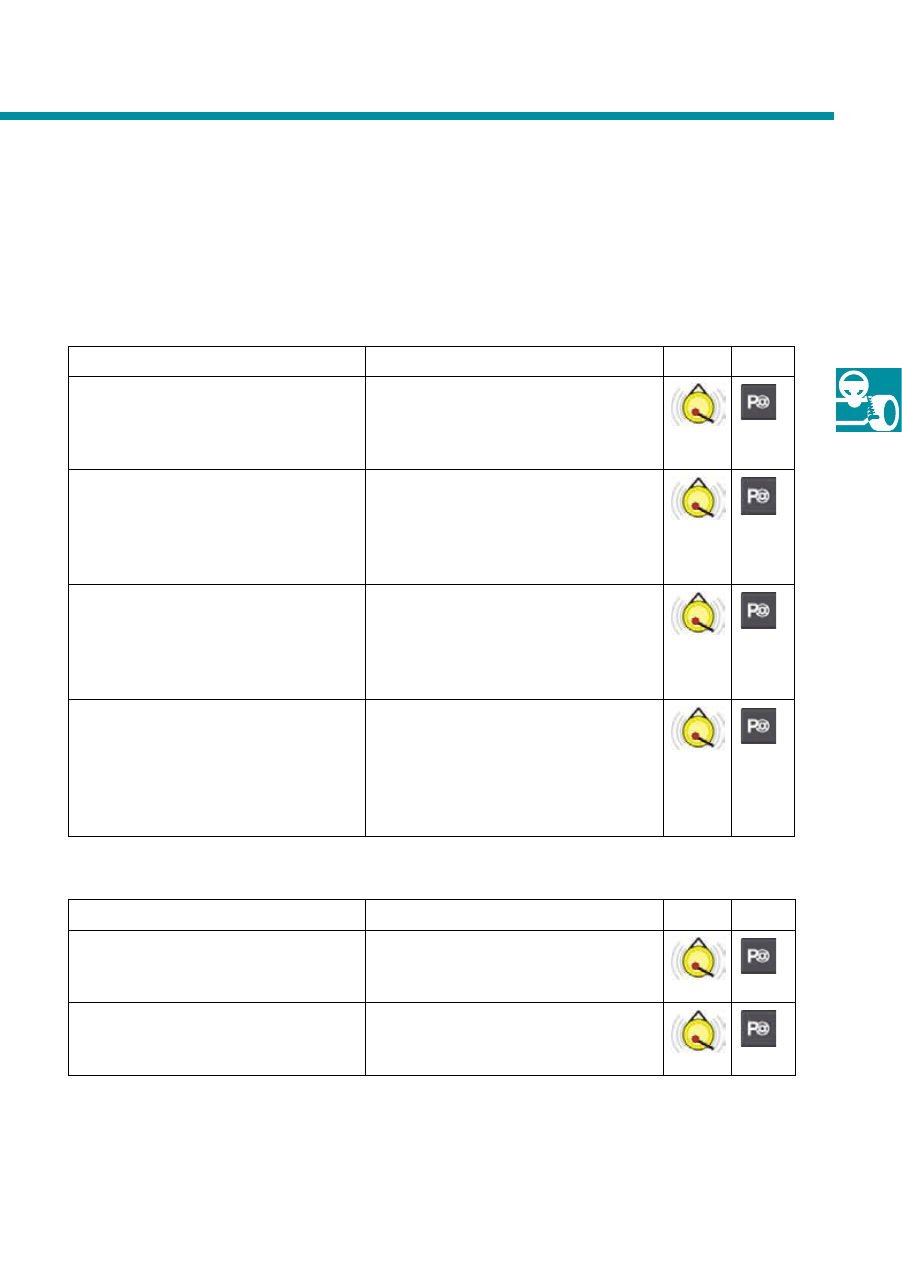
Poniższe warunki nie pozwalają na uruchomienie funkcji automatycznego parkowania:
Poniższe warunki powodują przerwanie poszukiwania luki:
Poniższe warunki powodują przerwanie manewru parkowania:
Czynność
Reakcja i komunikat
Dźwięk
K241
wyłączenie funkcji ESP
działanie ESP
„PLA deaktiviert! ESP ausgeschaltet!”
(„Parkowanie nieaktywne! ESP wyłączone!”)
„PLA deaktiviert! Eingriff ESP!”
(„Parkowanie nieaktywne! działanie ESP!”)
przyczepa podłączona do samochodu
„PLA deaktiviert! Anhänger!”
(„Wspomaganie nieaktywne! Przyczepa!”)
Jazda z prędkością poniżej 10km/h po
włączeniu zapłonu
„PLA beendet!”
(„Parkowanie zakończone!”)
jazda z prędkością powyżej 45km/h
„PLA: Geschwindigkeit zu hoch!”
(„Parkowanie: prędkość za duża!”)
Czynność
Reakcja i komunikat
Dźwięk
K241
prędkość jazdy powyżej 30km/h
„PLA: Geschwindigkeit zu hoch!”
(„Parkowanie: prędkość za duża!”)
Czynność
Reakcja i komunikat
Dźwięk
K241
prędkość jazdy powyżej 7km/h
„PLA: Geschwindigkeit zu hoch!”
(„Parkowanie: prędkość za duża!”)
przekroczenie czasu 180 sekund pomiędzy
włączeniem wstecznego biegu
a zakończeniem parkowania
PLA beendet! Zeitlimit überschritten!”
(„Parkowanie zakończone! Przekroczony
czas!”)
Warunki wyłączenia i komunikaty
Ze względu na złożony przebieg parkowania i możliwości jego zakłócenia konstruktorzy określili wiele warunków
przerwania manewru, tak by do minimum ograniczyć ryzyko wyrządzenia szkód.
21
Poniższe warunki powodują przerwanie manewru parkowania (kontynuacja):
Inne komunikaty o zakłóceniach, pojawiające się przy aktywnej funkcji automatycznego parkowania:
Czynność
Reakcja i komunikat
Dźwięk
K241
kierowca przyłożył do kierownicy moment
ponad 5Nm
„Lenkeingriff Fahrer!
Bitte Lenkung übernehmen!”
(„Kierowca kieruje! Proszę przejąć
kierowanie!”)
wyłączenie wstecznego biegu
„PLA beendet!
Bitte Lenkung übernehmen!”
(„Parkowanie zakończone! Proszę przejąć
kierowanie!”)
wyłączenie funkcji ESP
„ESP ausgeschaltet!
Bitte Lenkung übernehmen!”
(„ESP wyłączone! Proszę przejąć
kierowanie!”)
wyłączenie funkcji automatycznego
parkowania
„Lenkeingriff beendet!
Bitte Lenkung übernehmen!”
(„Parkowanie zakończone! Proszę przejąć
kierowanie!”)
Zakłócenie
Reakcja i komunikat
Dźwięk
K241
układ automatycznego parkowania
uszkodzony
„PLA defekt! Werkstatt!”
(„Parkowanie uszkodzone! Serwis!”)
miga
brak komunikatu w magistrali lub zakłócenie
w działaniu
„PLA deaktiviert! Systemstörung!!”
(„Parkowanie nieaktywne! Zakłócenie!”)
22
Części elektryczne
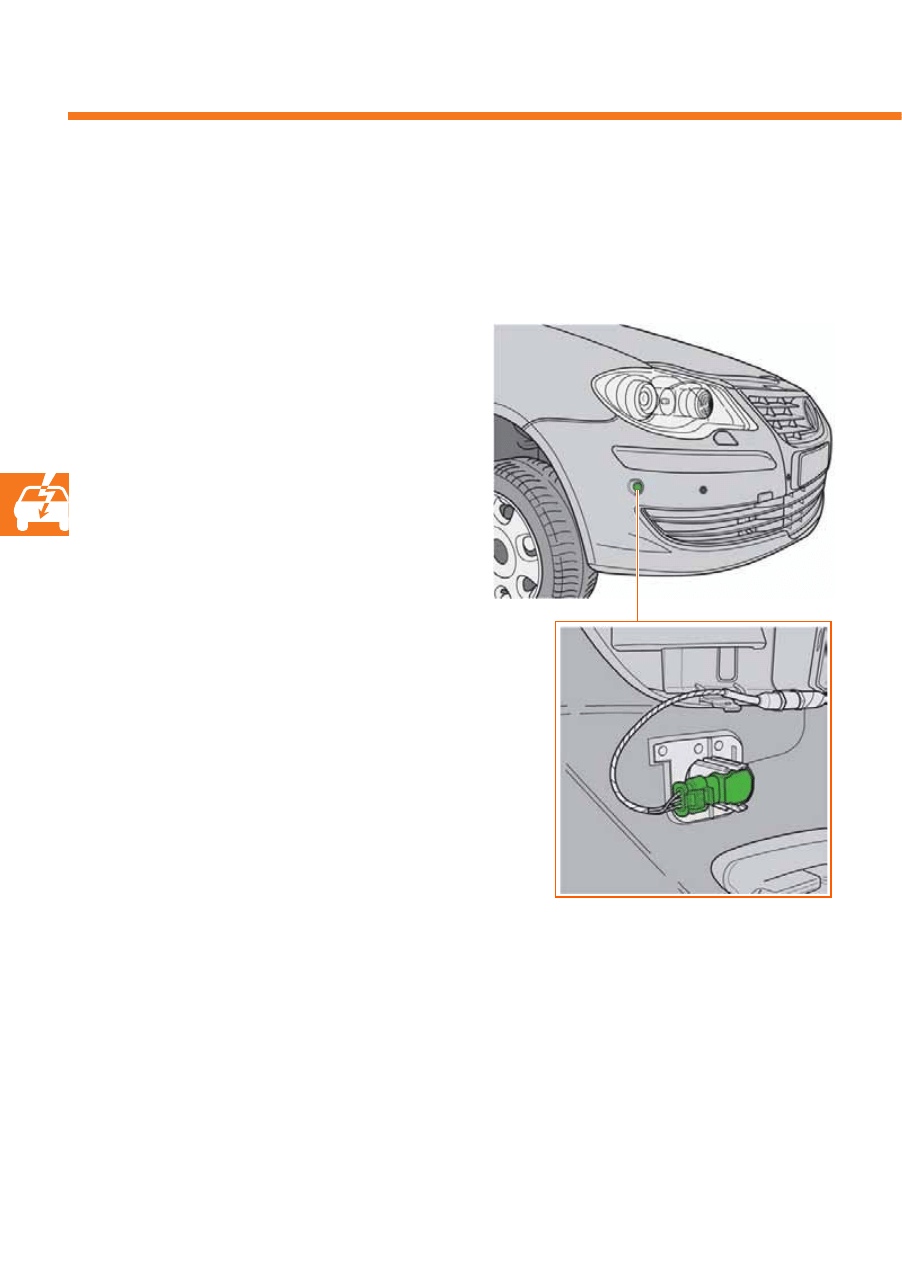
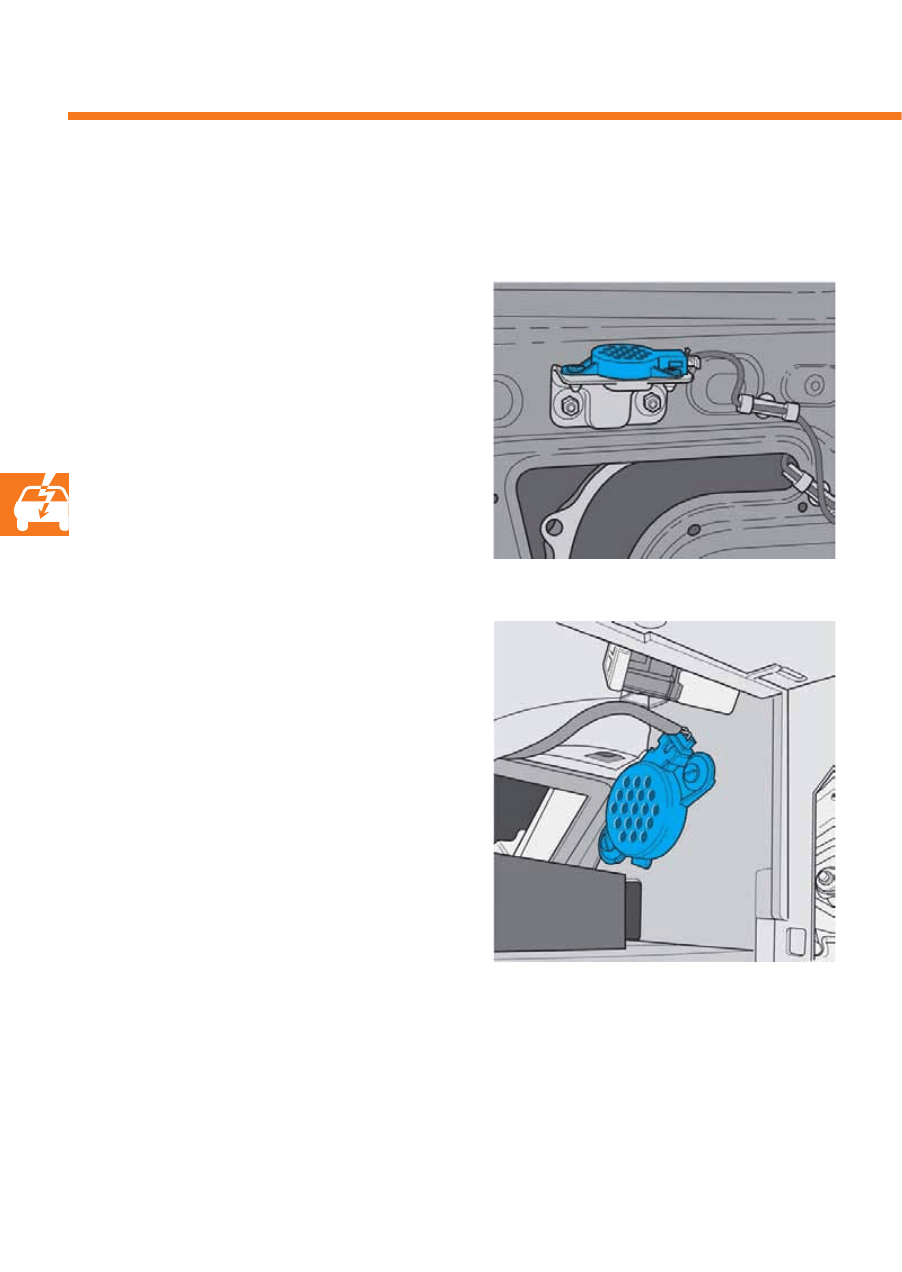
Czujniki
Czujnik lewy przedni automatycznego parkowania, lewa strona samochodu G568
Czujnik prawy przedni automatycznego parkowania, prawa strona samochodu G569
Oba czujniki są czujnikami ultradźwiękowymi,
umieszczonymi po lewej i prawej stronie pasa
przedniego. Czujniki są włożone od tyłu w uchwyty,
zamocowane w plastikowym poszyciu pasa
przedniego. Czujniki automatycznego parkowania
mają inną wielkość niż czujniki pomocy
w parkowaniu, więc nie można ich pomylić. Są
większe, gdyż mają większy kąt i zasięg działania.
Zastosowanie sygnału
Oba czujniki są wykorzystywane wyłącznie przez
funkcję automatycznego parkowania. Pracuje zawsze
jeden z nich, mierząc wielkość luki i odległość od
zaparkowanych samochodów oraz kontrolując odstęp
podczas parkowania.
Sygnał jest też wykorzystywany do obliczenia kąta
ustawienia samochodu względem krawędzi jezdni.
Skutki uszkodzenia
Czujnik jest diagnozowany.
Gdy jeden z czujników jest uszkodzony, funkcja
automatycznego parkowania nie działa.
S389_011
S389_009
23
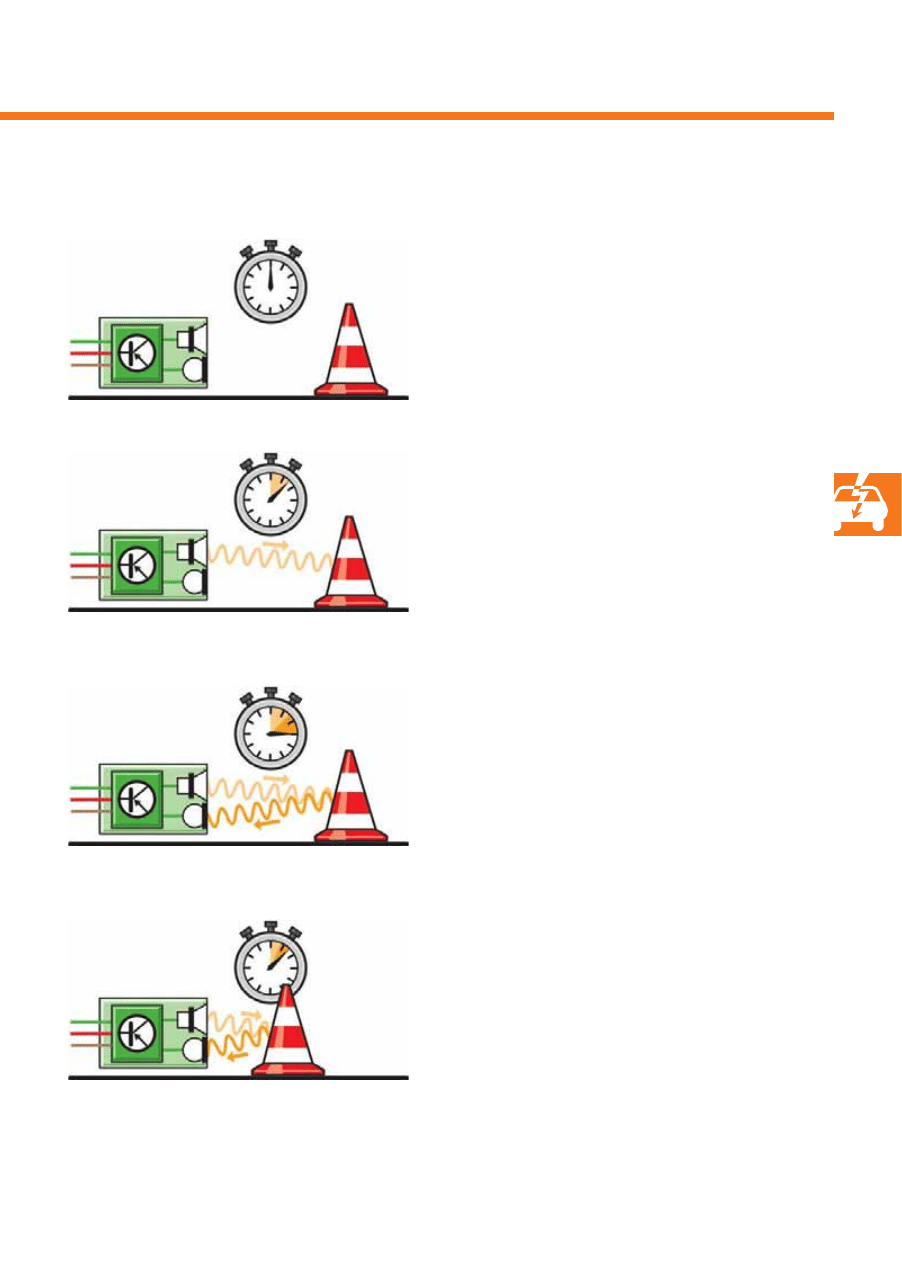
Jak to działa
Czujniki ultradźwiękowe to małe moduły
nadawczo-odbiorcze.
Działanie czujnika polega na tym, że wysyła on
niesłyszalne fale dźwiękowe (ultradźwięki). Fale
rozchodzą się w ośrodku otaczającym czujnik
(np. w powietrzu) ze stałą prędkością.
Fale dźwiękowe to zmiany gęstości i ciśnienia
powietrza, rozchodzące się koncentrycznie wokół
źródła. Prędkość rozchodzenia się fali zależy od
gęstości ośrodka, w którym się ona porusza.
W powietrzu, przy ciśnieniu normalnym (1bar)
i temperaturze 20°C, ta prędkość wynosi 343m/s.
W wodzie, np. przy temperaturze 0°C, jest to
1407m/s).
Zależność prędkości rozchodzenia się fali od
temperatury ośrodka jest przyczyną, dla której
konieczne jest użycie sygnału czujnika temperatury
zewnętrznej jako wartości korekcyjnej.
Gdy ultradźwięki napotkają przeszkodę (np. ścianę),
zostają w mniejszym lub większym stopniu odbite –
zależnie od właściwości przeszkody. Oznacza to, że
odbite fale powracają do czujnika i są rejestrowane
przez jego mikrofon. Czujnik mierzy czas, który
upłynął pomiędzy wysłaniem sygnału a odebraniem
jego odbicia. Na tej podstawie sterownik
automatycznego parkowania może obliczyć
odległość od przeszkody.
Wysłanie sygnału ultradźwiękowego
czujnik
ultradźwiękowy
Pomiar czasu do chwili zarejestrowania odbicia
Zmierzony czas jest bezpośrednią miarą
odległości czujnika od przeszkody.
S389_072
S389_049
S389_050
S389_051
fala dźwiękowa
przeszkoda
Stanowisko badawcze do pomiaru odległości
pomiar czasu
24
Części elektryczne
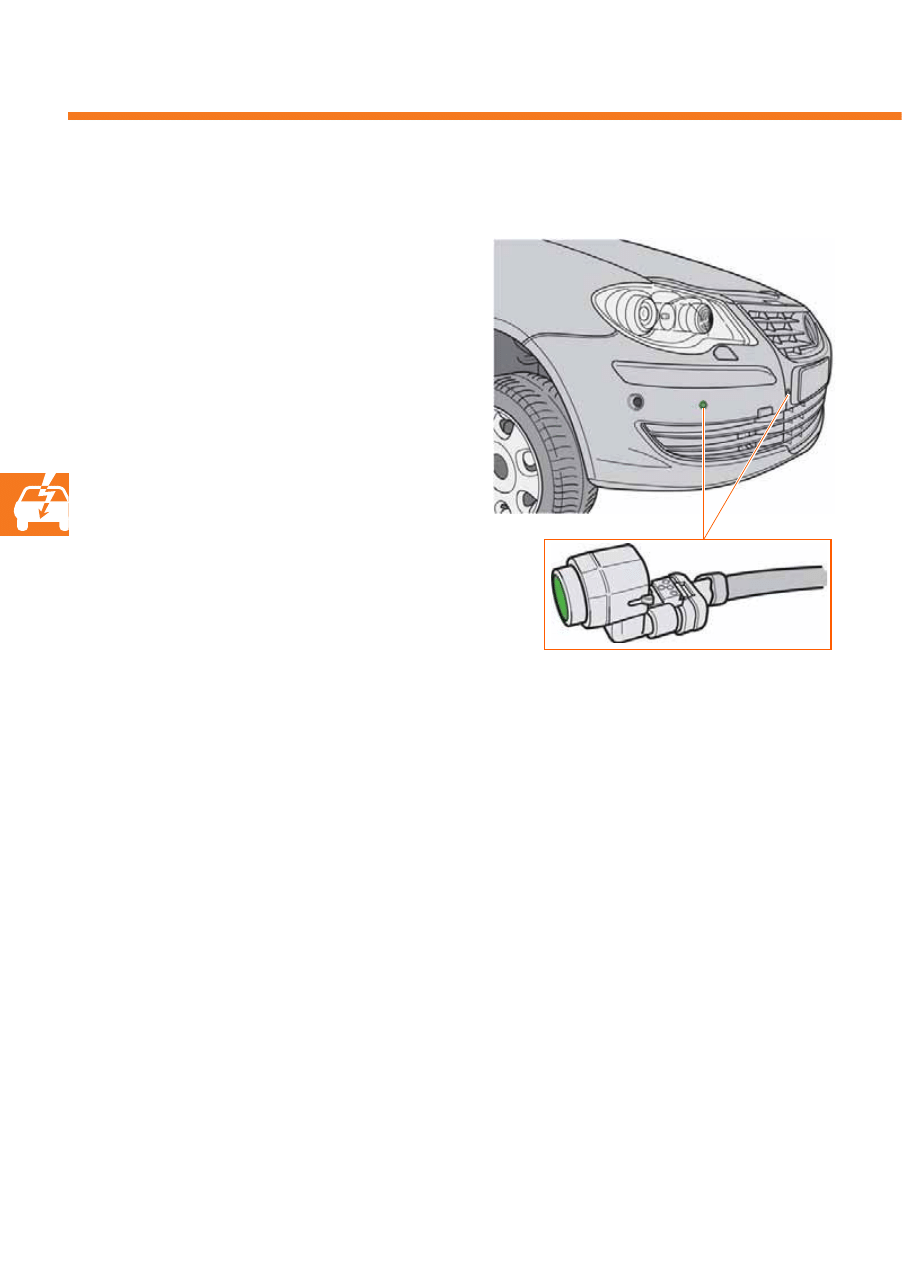
Czujniki ultradźwiękowe funkcji pomocy w parkowaniu (kontroli odstępu)
W przedniej i tylnej części nadwozia znajdują się po
cztery czujniki ultradźwiękowe:
— czujnik pomocy w parkowaniu, tylny lewy G203
— czujnik pomocy w parkowaniu, tylny lewy
środkowy G204
— czujnik pomocy w parkowaniu, tylny prawy
środkowy G205
— czujnik pomocy w parkowaniu, tylny prawy G206
— czujnik pomocy w parkowaniu, przedni prawy
G252
— czujnik pomocy w parkowaniu, przedni prawy
środkowy G253
— czujnik pomocy w parkowaniu, przedni lewy
środkowy G254
— czujnik pomocy w parkowaniu, przedni lewy G255
Czujniki są wciśnięte w plastikowe poszycia
przedniego i tylnego zderzaka.
Jak to działa
Czujniki pomocy w parkowaniu mają taką samą
budowę i zasadę działania, jak czujniki
automatycznego parkowania G568 i G569. Różnią się
mniejszym zasięgiem i kątem pomiarowym.
Czujniki są tak rozmieszczone, że ich obszary
pomiarowe lekko na siebie zachodzą. Dzięki temu nie
ma zjawiska „martwego pola”, w którym nie można
rozpoznać przeszkody.
Zastosowanie sygnału
Sygnały czujników są wykorzystywane zarówno przez
funkcję pomocy w parkowaniu, jak i automatycznego
parkowania. Obie funkcje potrzebują informacji
o odległości samochodu od innych obiektów.
Skutki uszkodzenia
Wszystkie czujniki są diagnozowane.
Jeden niesprawny czujnik powoduje wyłączenie
całego układu.
S389_012
S389_010
25
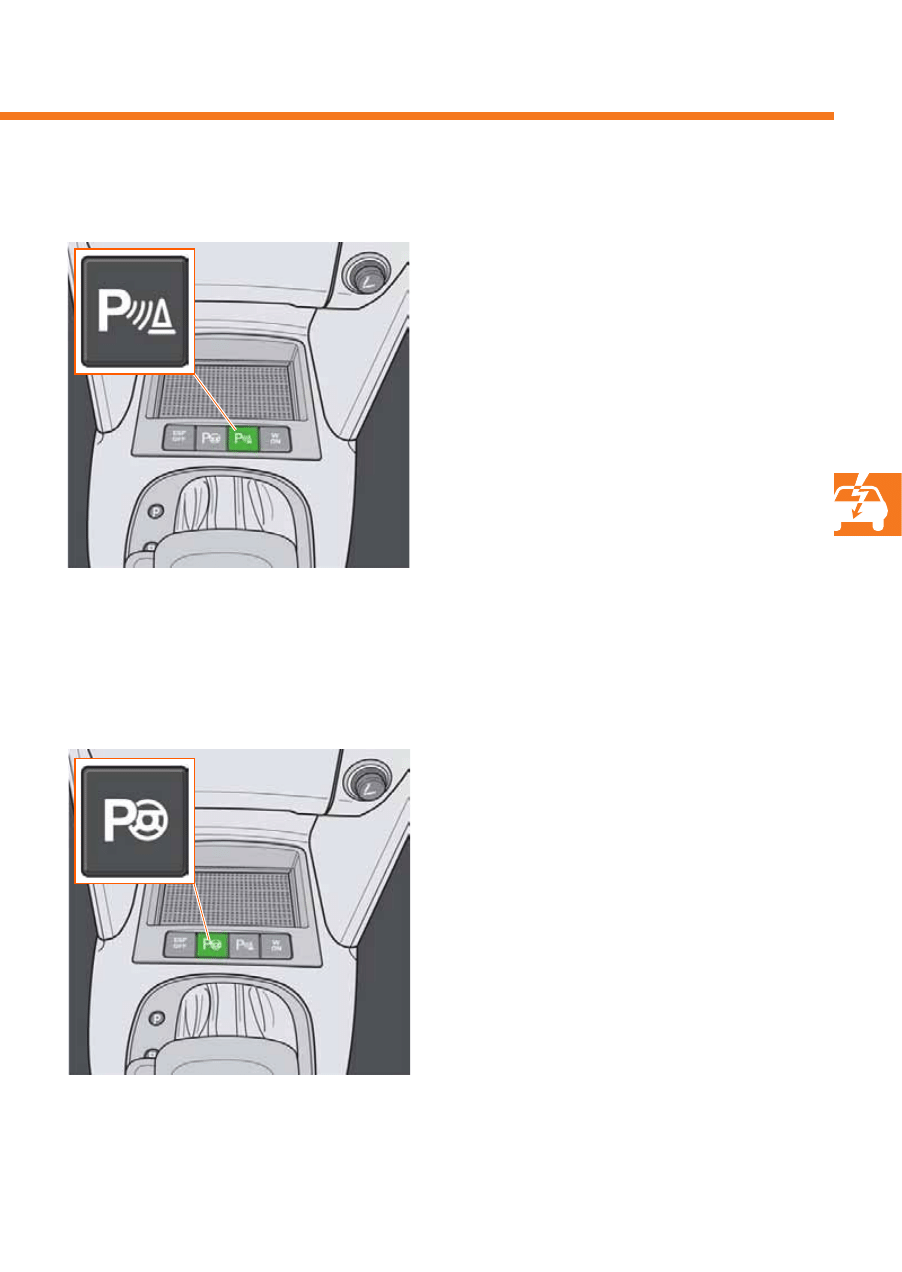
Przycisk pomocy w parkowaniu E266
z lampką kontrolną pomocy w parkowaniu K136
Przycisk znajduje się przed dźwignią zmiany biegów,
na prawo od przycisku układu automatycznego
parkowania. Żółta lampka kontrolna informuje o tym,
że funkcja jest aktywna.
Zastosowanie sygnału
Przycisk służy do włączania układu pomocy
w parkowaniu (kontroli odstępu).
Skutki uszkodzenia
Niesprawność układu spowodowana techniczną
usterką jednego z elementów jest sygnalizowana
miganiem lampki kontrolnej.
Przycisk automatycznego parkowania E581
z lampką kontrolną automatycznego parkowania K241
Ten przycisk również znajduje się przed dźwignią
zmiany biegów – na prawo od przycisku ESP. Żółta
lampka kontrolna informuje o tym, że funkcja
automatycznego parkowania jest aktywna.
Zastosowanie sygnału
Przycisk służy do włączania funkcji automatycznego
parkowania.
Skutki uszkodzenia
Niesprawność funkcji automatycznego parkowania,
spowodowana techniczną usterką jednego
z elementów, jest sygnalizowana miganiem lampki
kontrolnej.
S389_007, 013
S389_008, 014
26
Części elektryczne
Brzęczyk układu pomocy w parkowaniu, tylny H15
Brzęczyk układu pomocy w parkowaniu, przedni H22
Brzęczyk H15 znajduje się w prawej tylnej części
bagażnika. Brzęczyk H22 umieszczono na lewo od
kolumny kierownicy, w pobliżu sterownika
automatycznego parkowania.
Układ pomocy w parkowaniu ostrzega kierowcę za
pomocą brzęczyków o zbliżaniu się do przeszkody.
Odstęp czasowy kolejnych sygnałów informuje
o odległości od przeszkody. Ciągły sygnał oznacza
osiągnięcie lub przekroczenie najmniejszej
bezpiecznej odległości od przeszkody.
Skutki uszkodzenia
Oba brzęczyki są diagnozowane. Gdy jeden
z brzęczyków jest uszkodzony, układ pomocy
w parkowaniu nie działa w tym obszarze – z przodu
lub z tyłu.
Dźwięk (gong), który informuje kierowcę o stanie
pracy układu automatycznego parkowania, nie jest
realizowany za pomocą brzęczyków, lecz sygnału
dźwiękowego zestawu wskaźników.
Elementy wykonawcze
Brzęczyk układu pomocy w parkowaniu,
tylny
Brzęczyk pomocy w parkowaniu, przedni
S389_071
S389_005
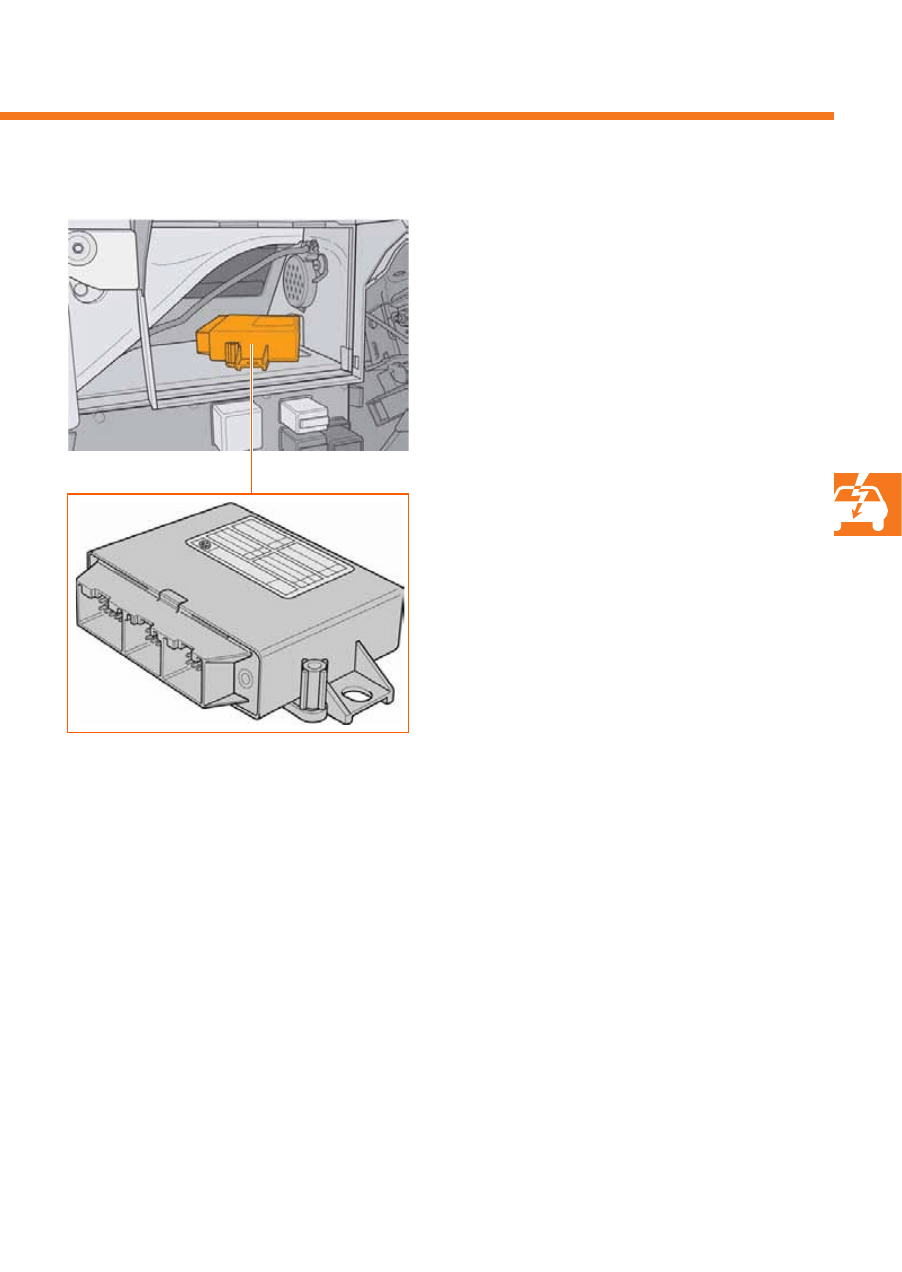
27
Sterownik układu automatycznego
parkowania J791
Sterownik znajduje się po lewej stronie kolumny
kierownicy, nad sterownikiem instalacji elektrycznej.
Jak już wspomniano, steruje on zarówno funkcją
pomocy w parkowaniu, jak i funkcją automatycznego
parkowania.
Jeżeli samochód ma układ automatycznego
parkowania, nie ma w nim sterownika układu pomocy
w parkowaniu.
Nie przewiduje się domontowywania układu
automatycznego parkowania w samochodach, które
mają układ pomocy w parkowaniu i sterownik tego
układu.
Sterowanie układu
S389_006
S389_018
28
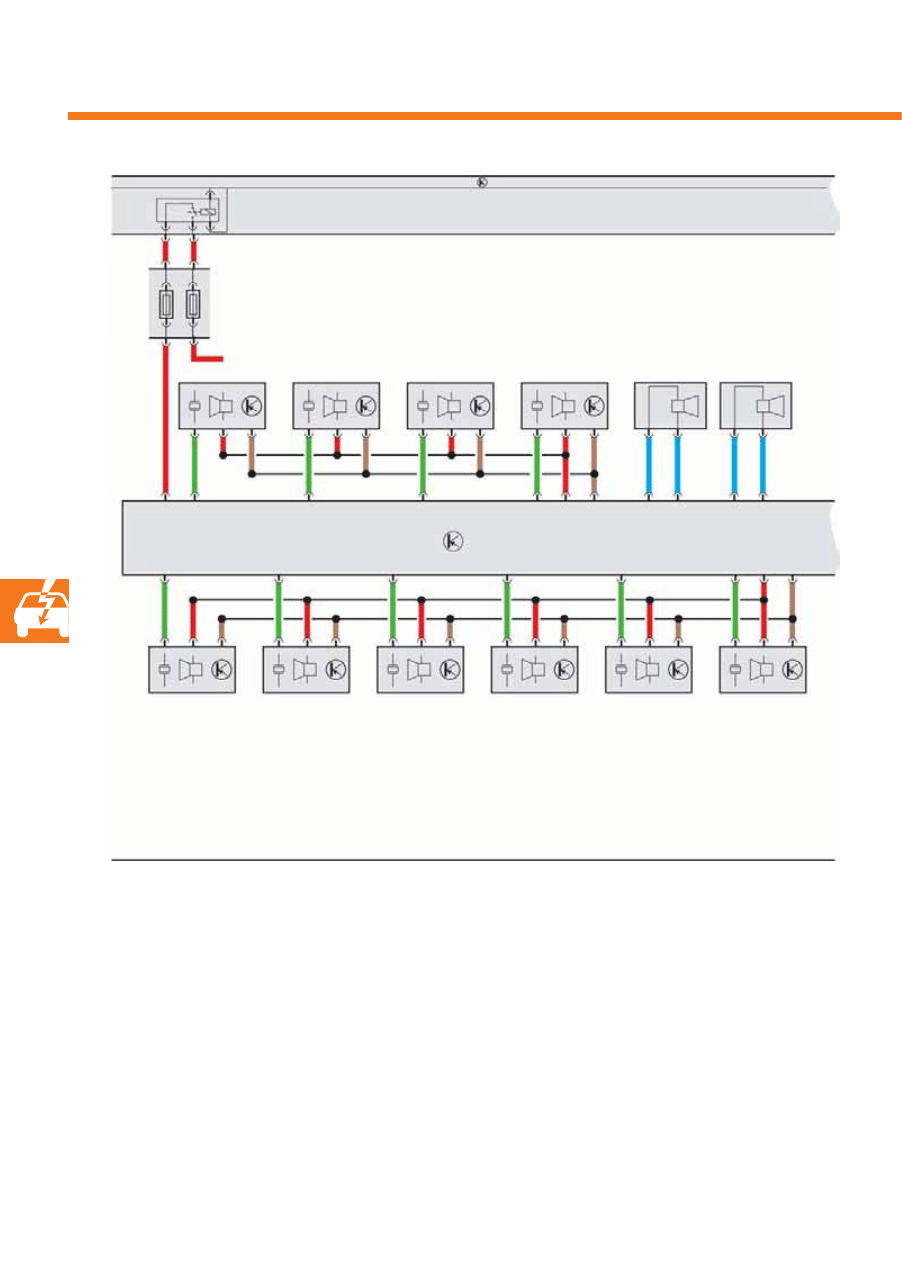
Schemat funkcjonalny
G203 czujnik pomocy w parkowaniu, tylny lewy
G204 czujnik pomocy w park., tylny lewy środkowy
G205 czujnik pomocy w park., tylny prawy środkowy
G206 czujnik pomocy w parkowaniu, tylny prawy
G252
czujnik pomocy w parkowaniu, przedni prawy
G253
czujnik pomocy w park., przedni prawy środkowy
G254
czujnik pomocy w park., przedni lewy środkowy
G255
czujnik pomocy w parkowaniu, przedni lewy
G568
czujnik automatycznego park., lewy przedni,
lewa strona samochodu
G569
czujnik automatycznego parkowania,
prawy przedni, prawa strona samochodu
H15
brzęczyk układu pomocy w parkowaniu, tylny
H22
brzęczyk układu pomocy w parkowaniu,
przedni
J519
sterownik instalacji elektrycznej
J681
przekaźnik 2 zasilania zacisku 15
J791
sterownik układu automatycznego
parkowania
A
akumulator
S
bezpiecznik
A+
G206
S
J519
J681
G205
G204
G204
J791
H15
H22
G568
G255
G254
G253
G252
G569
S389_053
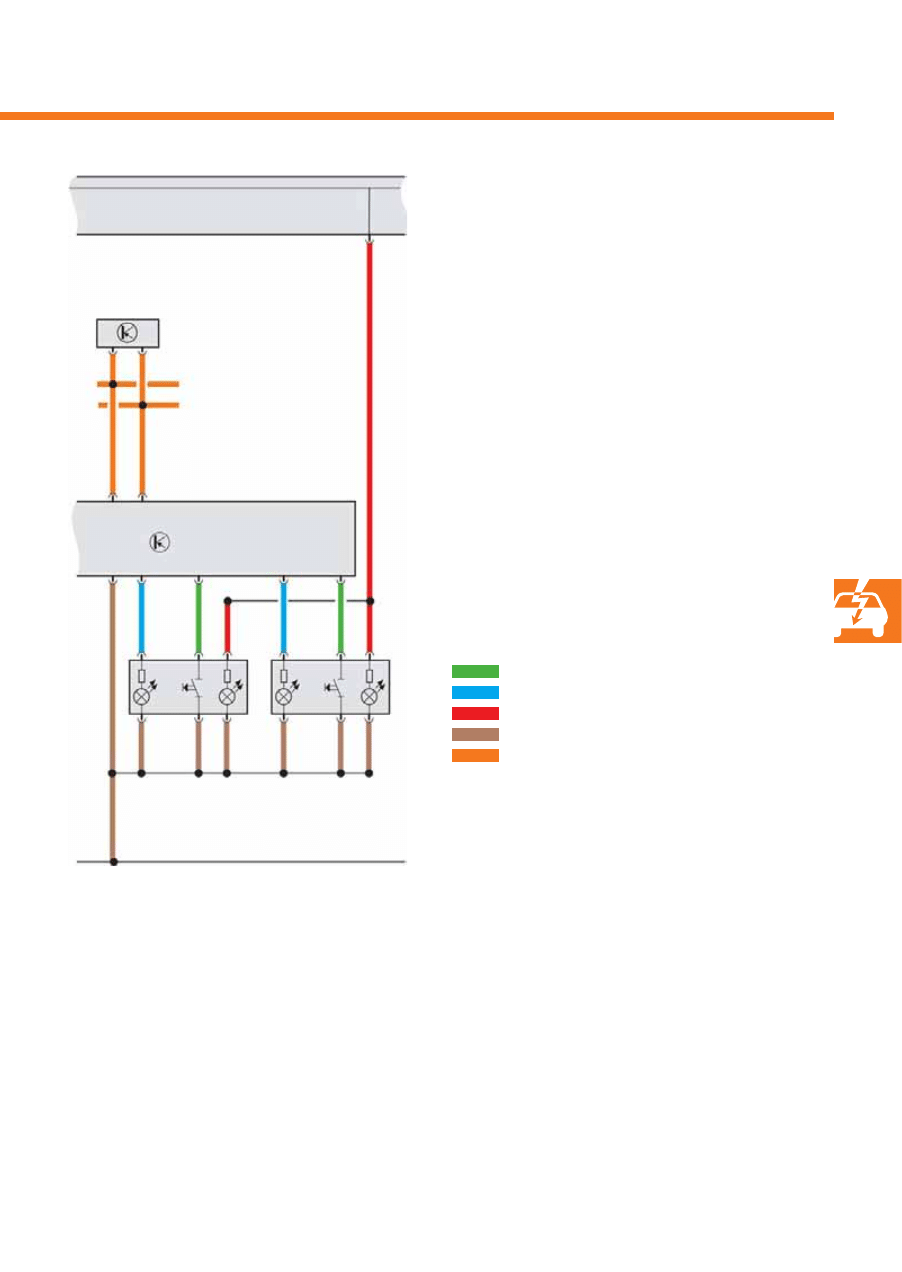
29
E266
przycisk pomocy w parkowaniu
E581
przycisk automatycznego parkowania
J533
sterownik gateway
J791
sterownik układu automatycznego parkowania
K136
lampka kontrolna pomocy w parkowaniu
K241
lampka kontrolna automatycznego parkowania
L76
żarówka podświetlająca przycisk
sygnał wejściowy
sygnał wyjściowy
plus
masa
magistrala CAN
K136
J791
J533
CAN napędu
E266
L76
K241
E581
L76
S389_054
30
Serwis
Diagnoza
Do diagnozy układu automatycznego parkowania
służą testery VAS 5051, VAS 5052 i VAS 5053.
Informacje specyficzne dla konkretnych krajów
Układ automatycznego parkowania musi być inaczej
skonfigurowany dla krajów o ruchu prawostronnym
i lewostronnym.
Konfiguracja odbywa się przez odpowiednie
zakodowanie układu testerem.
Odbywa się wtedy m.in. wymiana zapamiętanych
informacji, dotyczących parkowania po prawej i po
lewej stronie.
Oznacza to np., że kierowca w Wielkiej Brytanii musi
włączyć kierunkowskaz, jeśli chce zaparkować przy
prawej krawędzi jezdni. Układ zakodowany dla ruchu
lewostronnego standardowo zakłada, że kierowca
będzie parkował po lewej stronie.
W Niemczech kierowca włącza kierunkowskaz, chcąc
zaparkować po lewej stronie, gdyż układ
zakodowany dla ruchu prawostronnego zakłada, że
kierowca będzie parkować po prawej stronie.
S395_059
S389_060
Bliższe informacje na temat funkcji Poszukiwania usterek można znaleźć w instrukcji obsługi testera
VAS 5051, w rozdziale 7.
Prosimy pamiętać o prawidłowym kodowaniu układu, np. po pobycie w kraju, w którym jeździ się po
drugiej stronie jezdni.
S389_073
31
Sprawdzamy swoją wiedzę
1.
Która wypowiedź jest prawidłowa?
a) Funkcja automatycznego parkowania wykonuje cały manewr parkowania całkowicie automatycznie.
Podczas całego manewru kierowca nie musi nic robić.
b) Funkcja automatycznego parkowania odpowiada tylko za kontrolę odstępu od przeszkód, znajdujących
się w pobliżu parkującego samochodu.
c) Funkcja automatycznego parkowania kieruje samochodem podczas parkowania przy prawej i lewej
krawędzi jezdni.
Kierowca musi obsługiwać gaz, sprzęgło i hamulce. Ponosi on pełną odpowiedzialność za przebieg
manewru.
2.
Które czynności może wykonać układ automatycznego parkowania?
a) kontrola odstępu od przeszkód (pomoc w parkowaniu)
b) pomiar i wskazywanie luk do parkowania po obu stronach samochodu równocześnie
c) kierowanie samochodem podczas parkowania przodem po prawej stronie
d) kierowanie samochodem podczas parkowania przodem po lewej stronie
e) kierowanie samochodem podczas parkowania tyłem po prawej stronie
f) kierowanie samochodem podczas parkowania tyłem po lewej stronie
3.
Powyżej jakiej prędkości jazdy układ automatycznego parkowania przerywa wyszukiwanie luki
i przechodzi w stan czuwania (stand-by)?
a) od prędkości 45km/h
b) od prędkości 30km/h
c) od prędkości 15km/h
Które odpowiedzi są prawidłowe?
Na poniższe pytania może być więcej prawidłowych odpowiedzi!
Ro
związania:
1. c); 2. a),
e), f); 3.
b)
© VOLKSWAGEN AG, Wolfsburg
Wszelkie prawa zastrzeżone. Zmiany zastrzeżone.
000.2811.84.11 Stan techniczny 01.2007
Volkswagen AG
Service Training VSQ-1
Brieffach 1995
38436 Wolfsburg
389
Wyszukiwarka
Podobne podstrony:
413 Układ automatycznego parkowania w Audi A3
Automatyka Układ automatycznej regulacji w silnikach prądu stałego
Układ automatycznej regulacji sprawozdanie
Układ automatycznej regulacji prędkości obrotowej silnika
Układ automatycznej regulacji prędkości obrotowej silnika prądu stałego
Układ automatycznej regulacji prędkości obrotowej
Układ automatycznego
Układ pomocy w parkowaniu przedni i tylny
Układ pomocy w parkowaniu
układ dynamiczny automaty
Stefanowski- Układ zdalnego sterowania i zabezpieczeń, Akademia Morska -materiały mechaniczne, szkoł
Giełdy układ nerwowy (Automatycznie zapisany)
układ schmitta, mechanika, BIEM- POMOCE, automatyka i sterowanie, laborka ais
Uklad wydalniczy (Automatycznie zapisany), dydaktyka, biologia-praktyki, II gimnazjum
Mechanika projekt 1 - przestrzenny układ sił, Automatyka i robotyka, Ćwiczenia
więcej podobnych podstron