Wprowadzenie do robotyki
mobilnej
Budowa maszyn mobilnych
`
Wprowadzenie do robotyki mobilnej
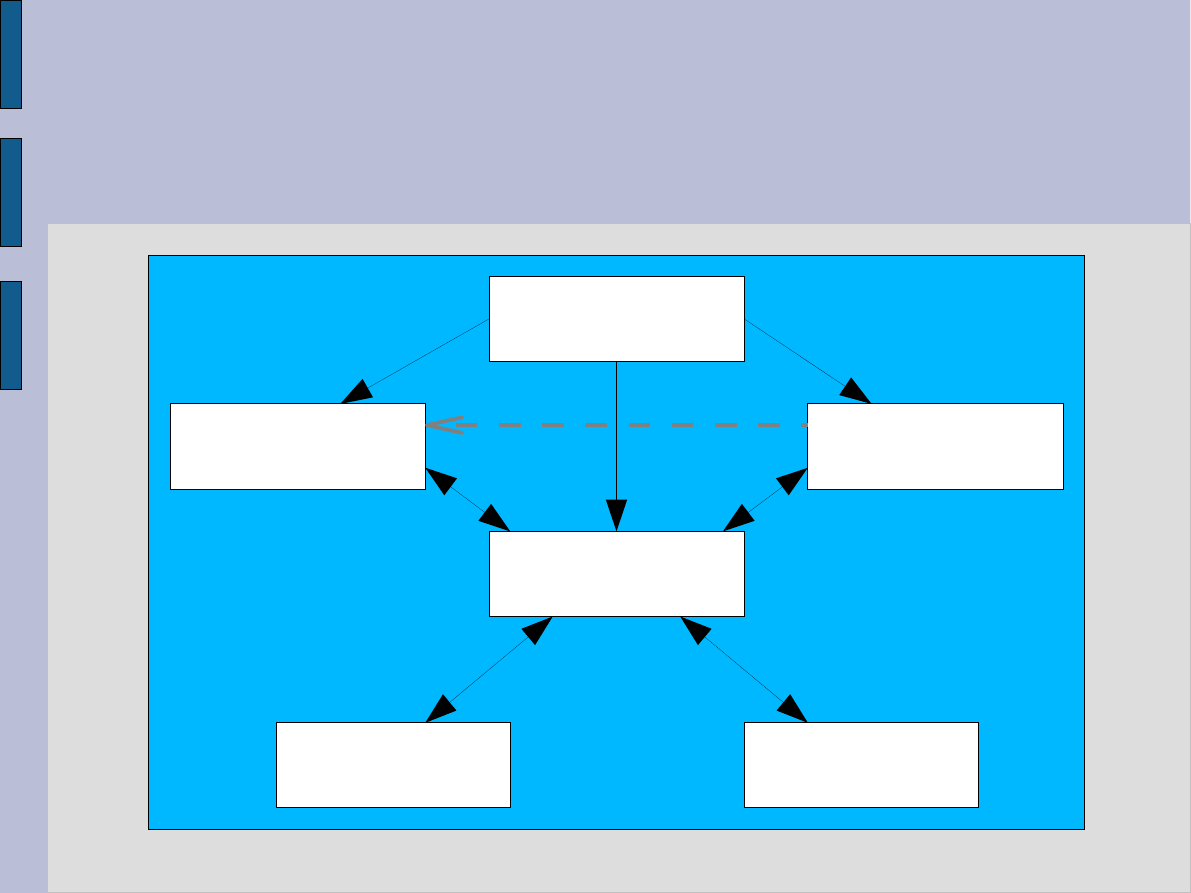
Budowa maszyn mobilnych
Sterownik
Zasilanie
Sensory
Efektory
Interfejs
użytkownika
Komunikacja
Maszyna
Wprowadzenie do robotyki
mobilnej
Zasilanie
Zasilanie:
●
Powinno gwarantować dostarczenie napięcia
odpowiedniej wartości, pozwalającego na
zasilenie wszystkich układów maszyny.
●
Powinno gwarantować dostarczenie prądu
niezbędnego do poprawnej pracy wszystkich
urządzeń maszyny.
●
Nie powinno zbyt mocno obciążać maszyny
pod kątem objętości i masy.
●
Nie powinno być źródłem niepożądanych pól
elektromagnetycznych lub ciepła.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Zasilanie
Zasilanie:
●
Układy dopasowujące poziomy napięć
●
Akumulatory w maszynach autonomicznych
●
Alternatywne źródła energii
Parametry:
●
Masa
●
Objętość, rozmiar.
●
Napicie, prąd, moc.
●
Pojemność
●
Cena i koszt użycia
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Zasilanie

Wprowadzenie do robotyki
mobilnej
Sensory

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki
Czujnik (sensor) to fizyczne lub biologiczne
narzędzie pozwalające na wychwytywanie,
rozpoznawanie i rejestrowanie sygnałów
z otaczającego środowiska.

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Klasyfikacja
Ze względu na rodzaj sygnału wyjściowego:
●
Rezystancyjne
●
Pojemnościowe
●
Indukcyjne, magnetyczne
●
Napięciowe
●
Prądowe
●
Piezoelektryczne
●
Piezorezystywne
●
Tensometryczne
●
Ultradźwiękowe
●
…

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Klasyfikacja
Ze względu na wielkość mierzoną:
●
Położenia, odległości
●
Kąta obrotu, prędkości obrotowej
●
Przyspieszenia
●
Siły, ciśnienia, momentu
●
Przepływu
●
Temperatury
●
Natężenia światła
●
Gazu
●
Wilgotności
●
...

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Klasyfikacja
Ze względu na źródło energii sygnału
pomiarowego:
●
Pasywne (bierne) – nie potrzebują dostarczenia energii
zewnętrznej by uzyskać z nich pomiar
●
Aktywne (czynne) – charakteryzujące się emisją energii do
otoczenia lub modyfikacją tego otoczenia
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Klasyfikacja
Ze względu na punkt odniesienia:
●
Względne – odniesienie wartości mierzonej do pewnej
wartości odniesienia
●
Różnicowe – pomiar różnicy dwóch wartości
●
Absolutne – pomiar wartości bezwzględnej
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Klasyfikacja
Eksteroreceptory: receptory odbiorcze pozwalające na
rejestrowanie zmian zachodzących w środowisku
zewnętrznym (pozwalające na realizację pomiaru
zewnętrznej wielkości fizycznej).
Interoreceptory (proprioreceptory): receptory
odbiorcze reagujące na zmiany wewnętrzne środowiska
(pozwalające na realizację pomiaru parametrów
wewnętrznych maszyny.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Własności
Parametry czujników:
●
Szybkość działania – częstotliwość, pasmo pracy, czas
realizacji pomiaru.
●
Błąd pomiaru – bezwzględny, względny lub maksymalny,
dokładność, precyzja.
●
Odporność – zakres pracy, warunki pracy, odporność na
zakłócenia.
●
Obciążalność obliczeniowa – czujniki mogą wymagać realizacji
pewnych obliczeń.
●
Zakres pracy – relacja między najmniejszą i największą
wartością sygnału mierzonego
●
Rozdzielczość – minimalna różnica wykrywalna przez czujnik
●
Obciążenia w zakresie mocy, wagi oraz objętości
●
Cena i koszt zastosowania
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Własności problemy
●
Zakłócenia i szumy pomiarowe
●
Otrzymywana informacja o otoczeniu bywa niepełna
●
Problemy w modelowaniu czujników
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
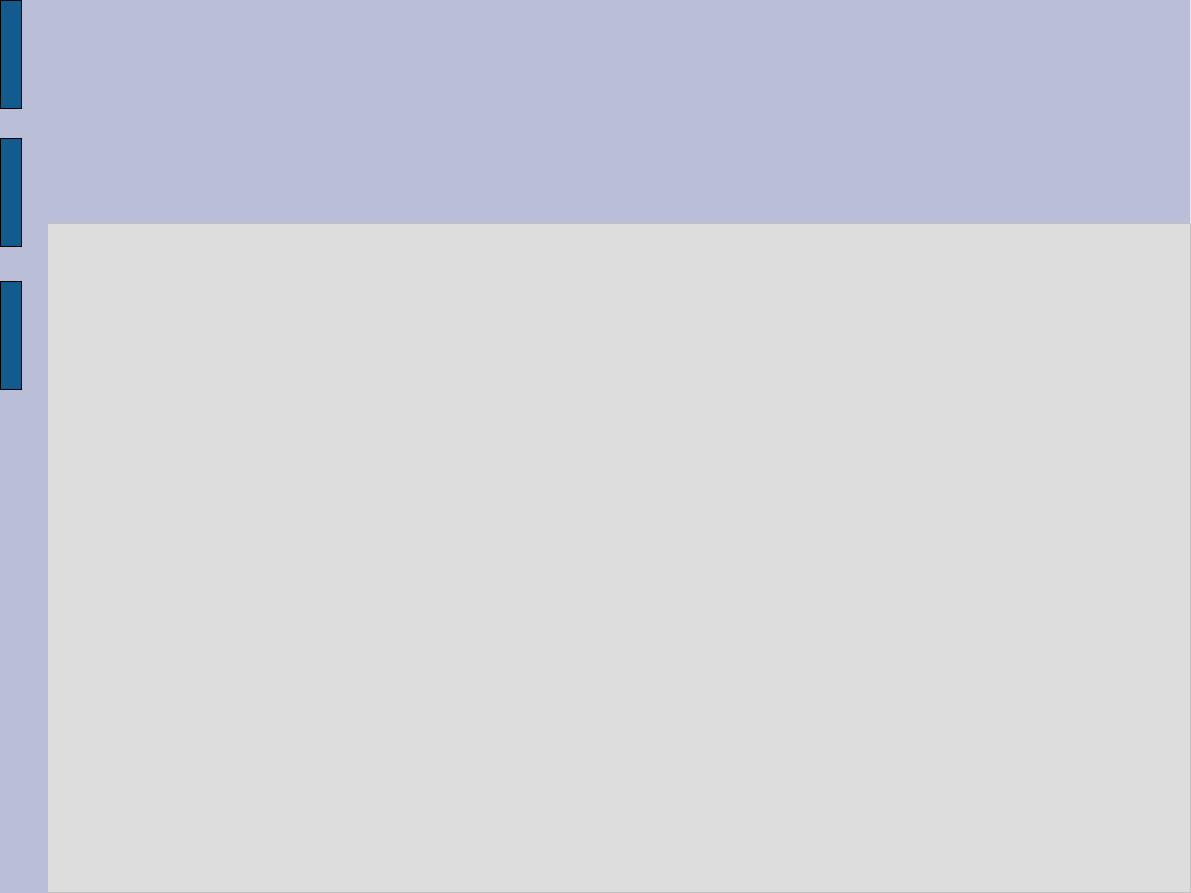
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Pozwalają na identyfikowanie stanu danego parametru Można ich
używać do identyfikacji otwarcia drzwi, włączenia urządzenia,
naciśnięcia przycisku, zetknięcia z powierzchnią, momentu
osiągnięcia pożądanej lub krańcowej pozycji itp.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
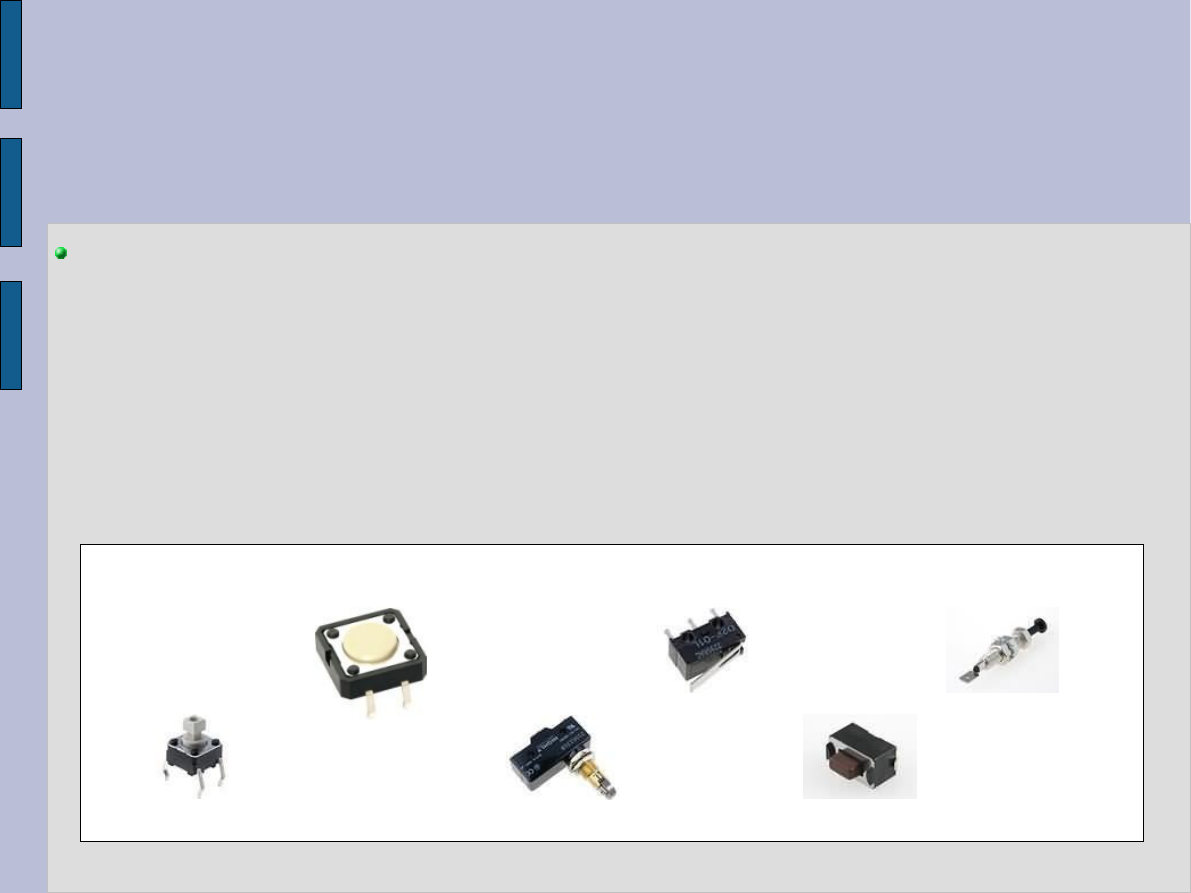
Światła
Zaliczamy do nich wszystkie przetworniki światła: fotorezystory,
fotodiody, fototranzystory, transoptory, czujniki światłowodowe,
czujniki optoelektroniczne, przetworniki wizyjne, kamery.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
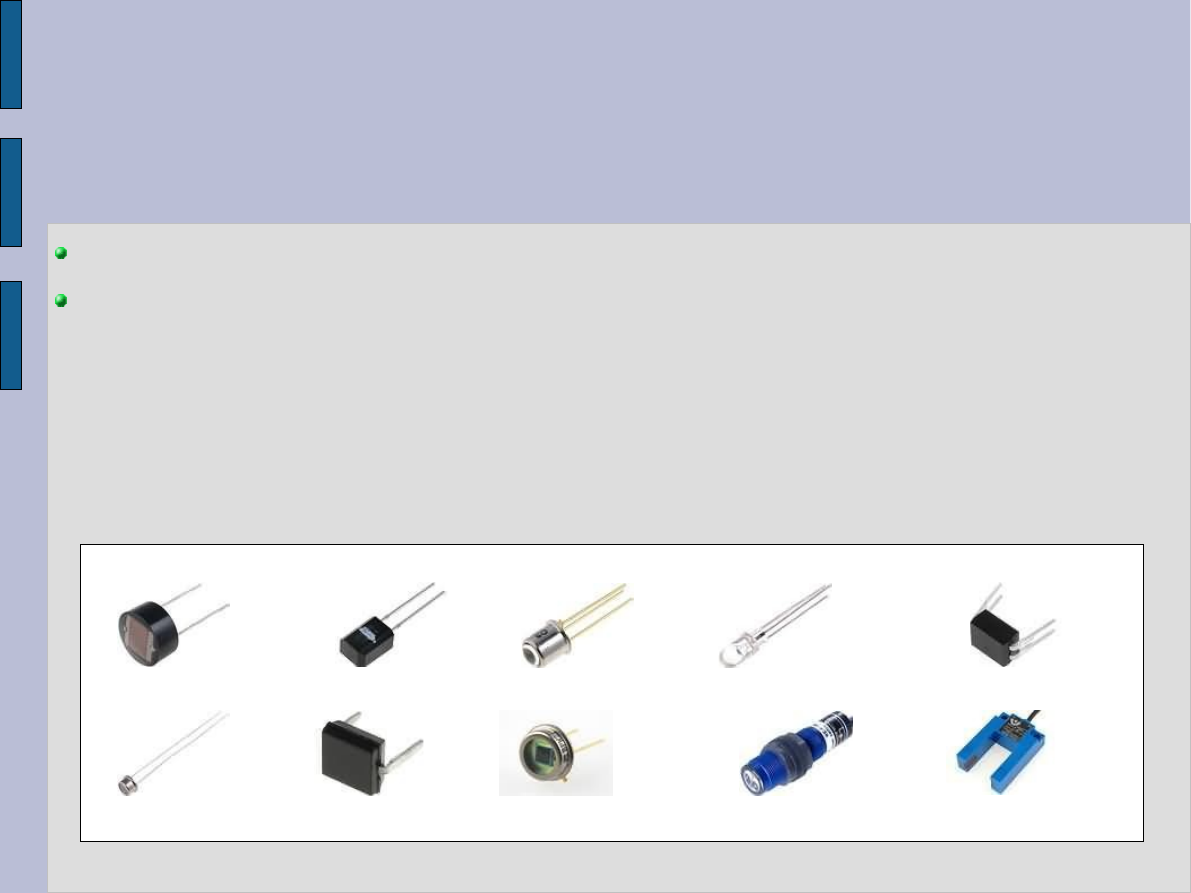
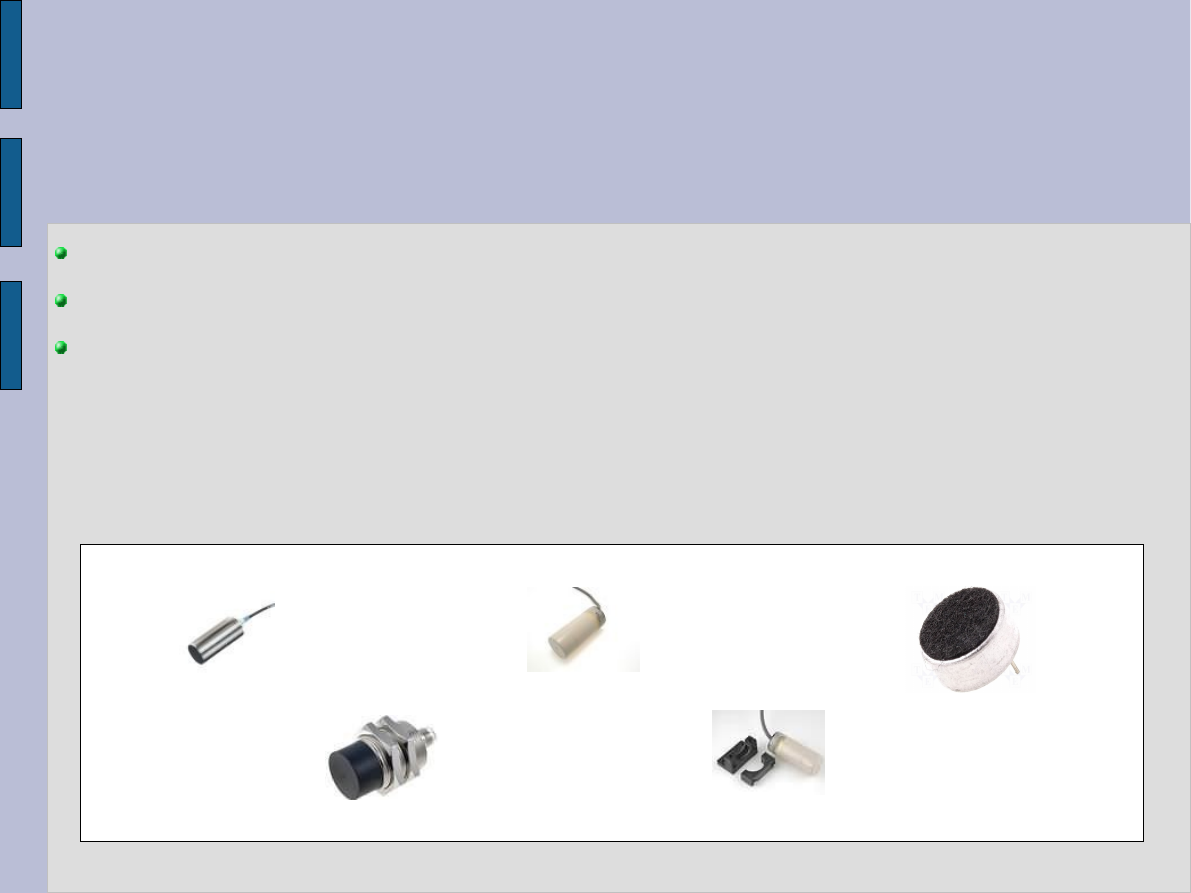
Indukcyjne i pojemnościowe
Czujniki indukcyjne i pojemnościowe wykorzystywane są do
pomiaru położenia i małych odległości oraz do przetwarzania
dźwięku.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
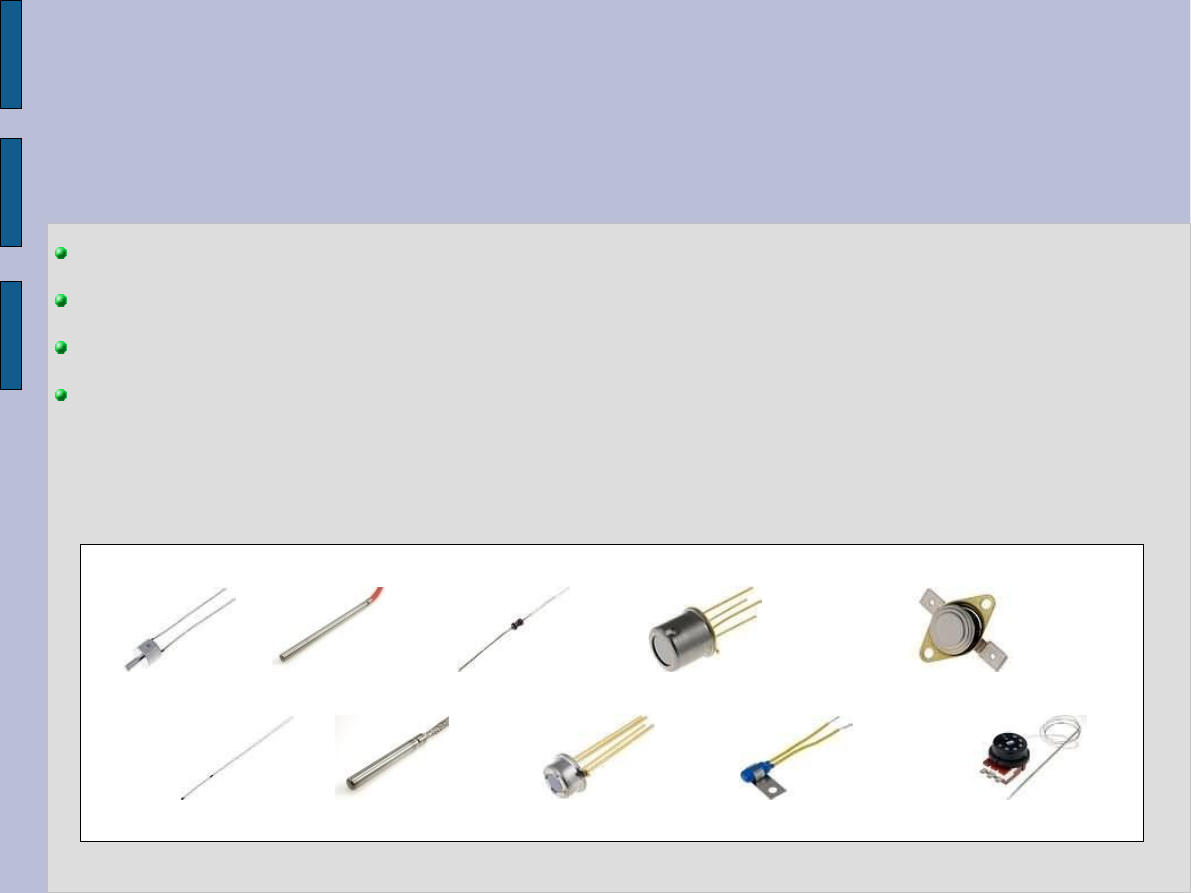
Temperatury
Termistory, termopary, detektory piroelektryczne, termostaty
(bimetaliczne, z kapilarą)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
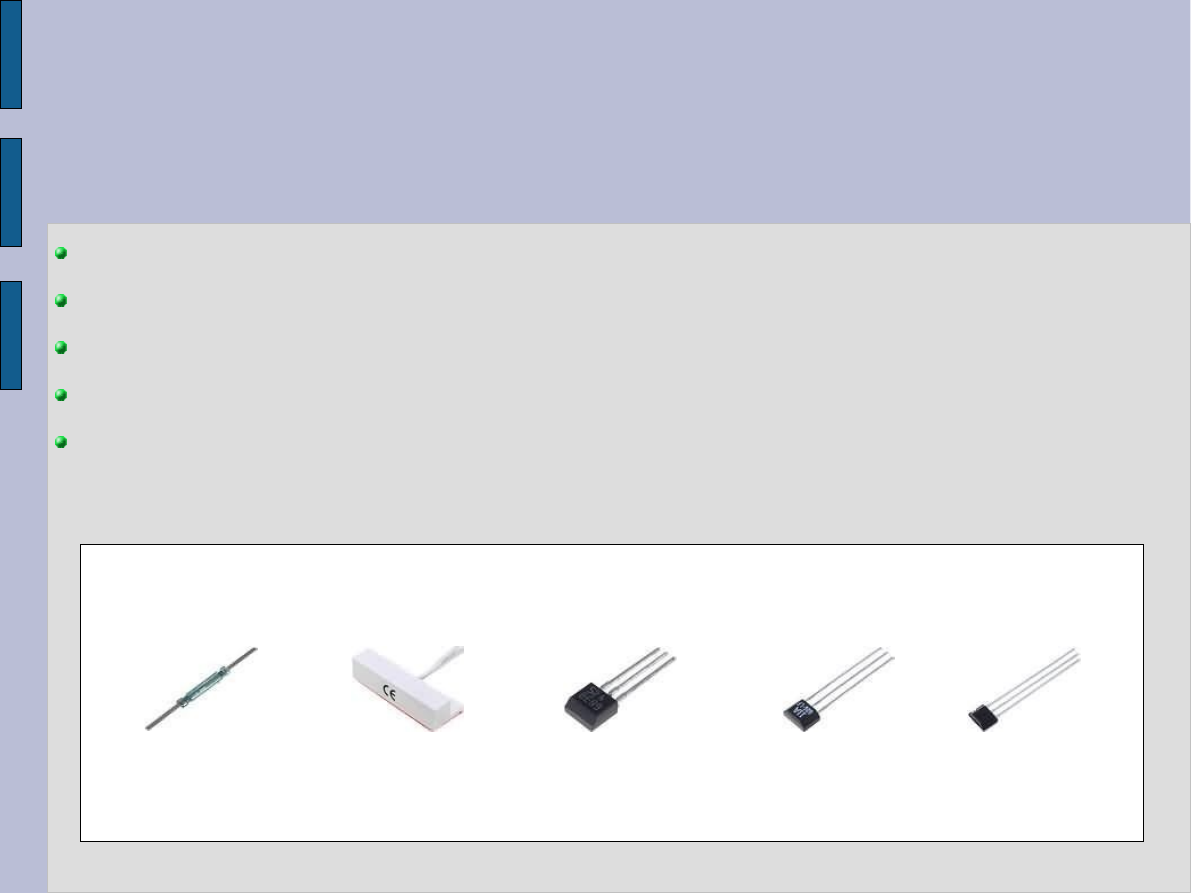
Pola magnetycznego
Kontraktrony, rezystancyjne, czujniki położenia, hallotrony.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
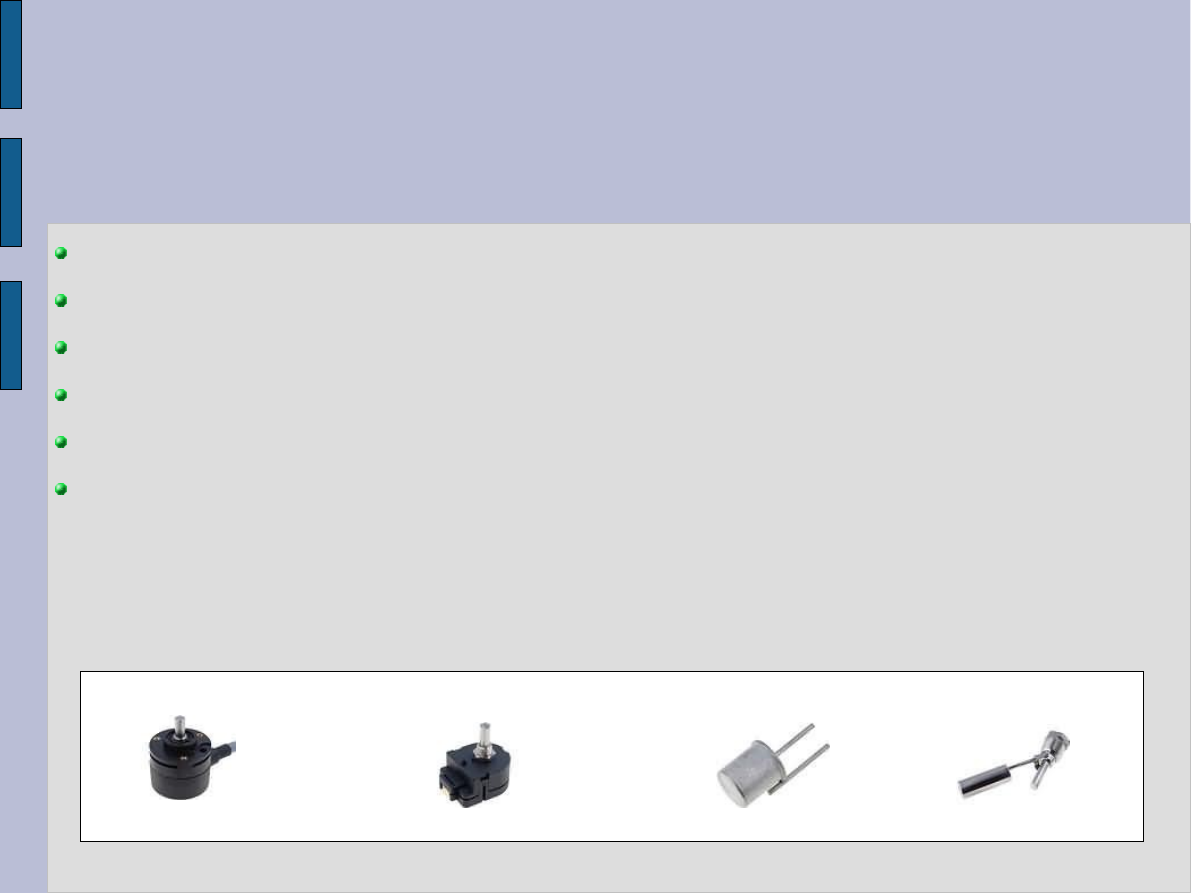
Warunków środowiskowych
Czujniki położenia kątowego, wibracyjne, enkodery, czujniki
poziomu cieczy, ruchu, obrotowo impulsowe.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
Warunków środowiskowych
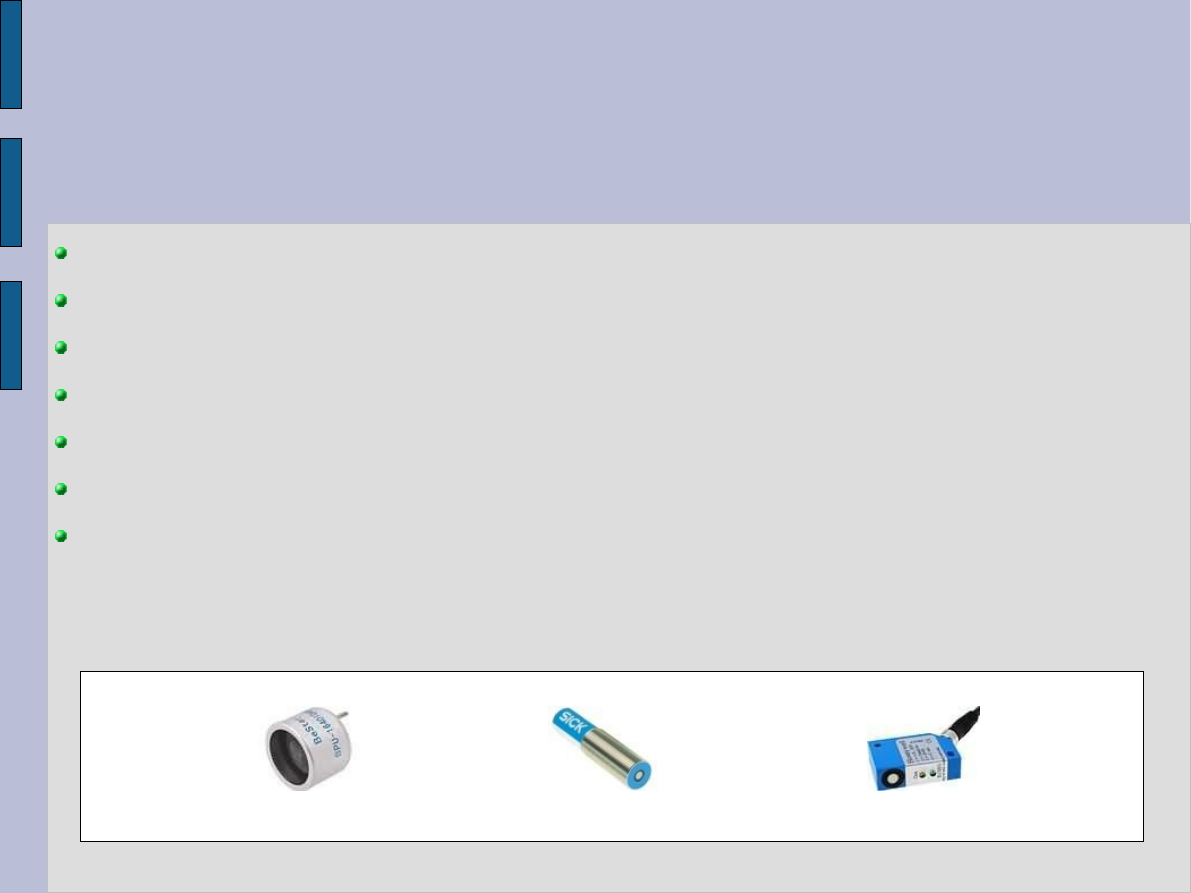
Ultradźwiękowe
Pomiar prędkości, odległości, identyfikacja ruchu.

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
Warunków środowiskowych
Ultradźwiękowe
Nacisku
Foliowe, tensometry.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
Warunków środowiskowych
Ultradźwiękowe
Nacisku
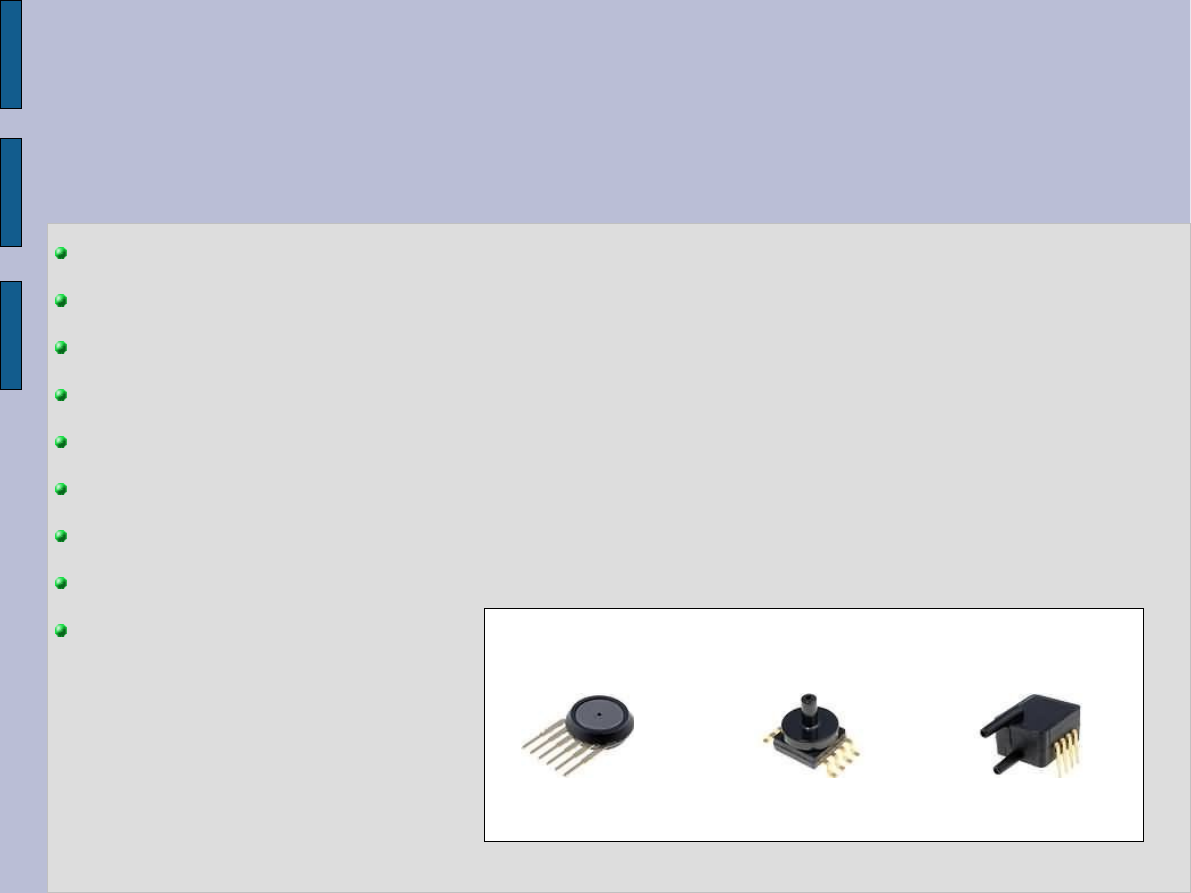
Ciśnienia
Absolutne, względne
różnicowe.

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
Warunków środowiskowych
Ultradźwiękowe
Nacisku
Ciśnienia
Wilgotności
Pojemnościowe,
rezystancyjne.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – Przykłady
Włączniki, wyłączniki i przełączniki
Światła
Indukcyjne i pojemnościowe
Temperatury
Pola magnetycznego
Warunków środowiskowych
Ultradźwiękowe
Nacisku
Ciśnienia
Wilgotności
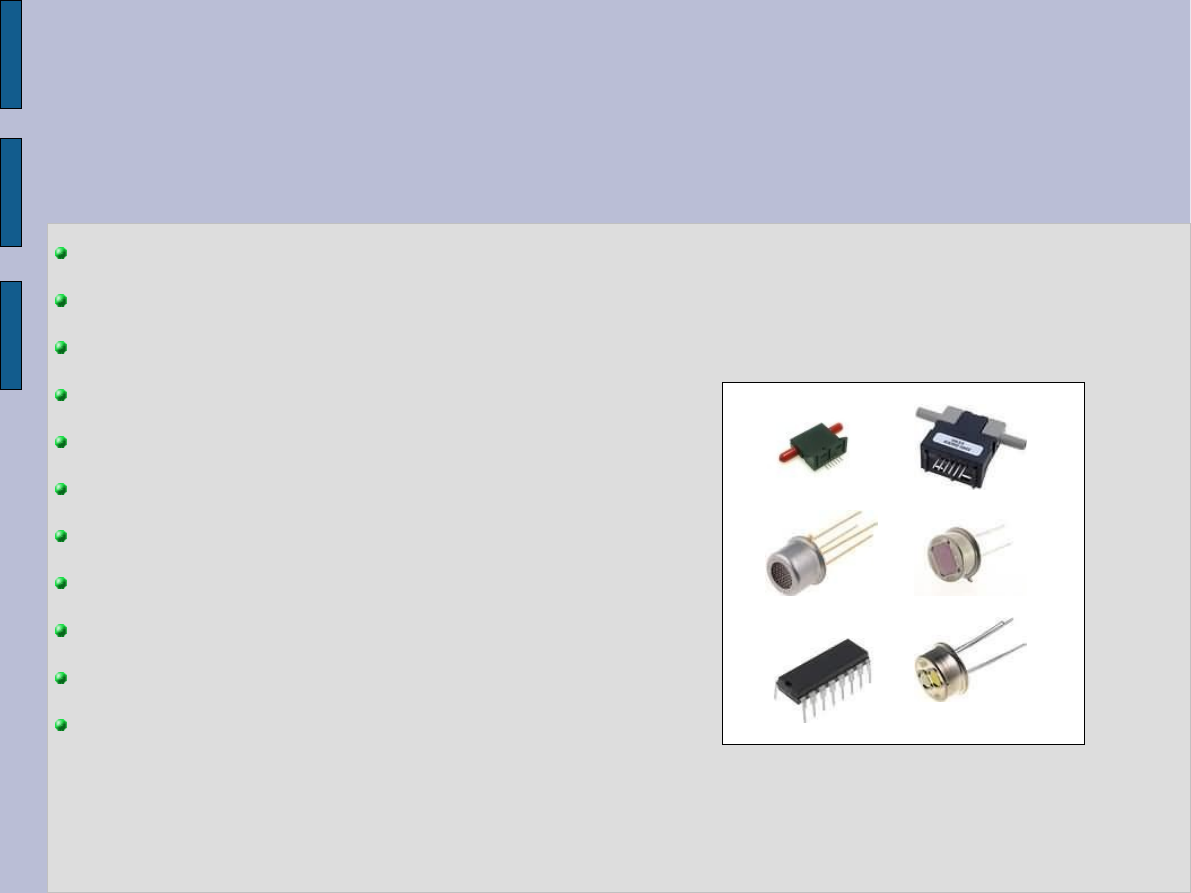
Czujniki i detektory gazu
Czujniki przepływu, gazów, dymu, termoelektryczne, pirometry.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
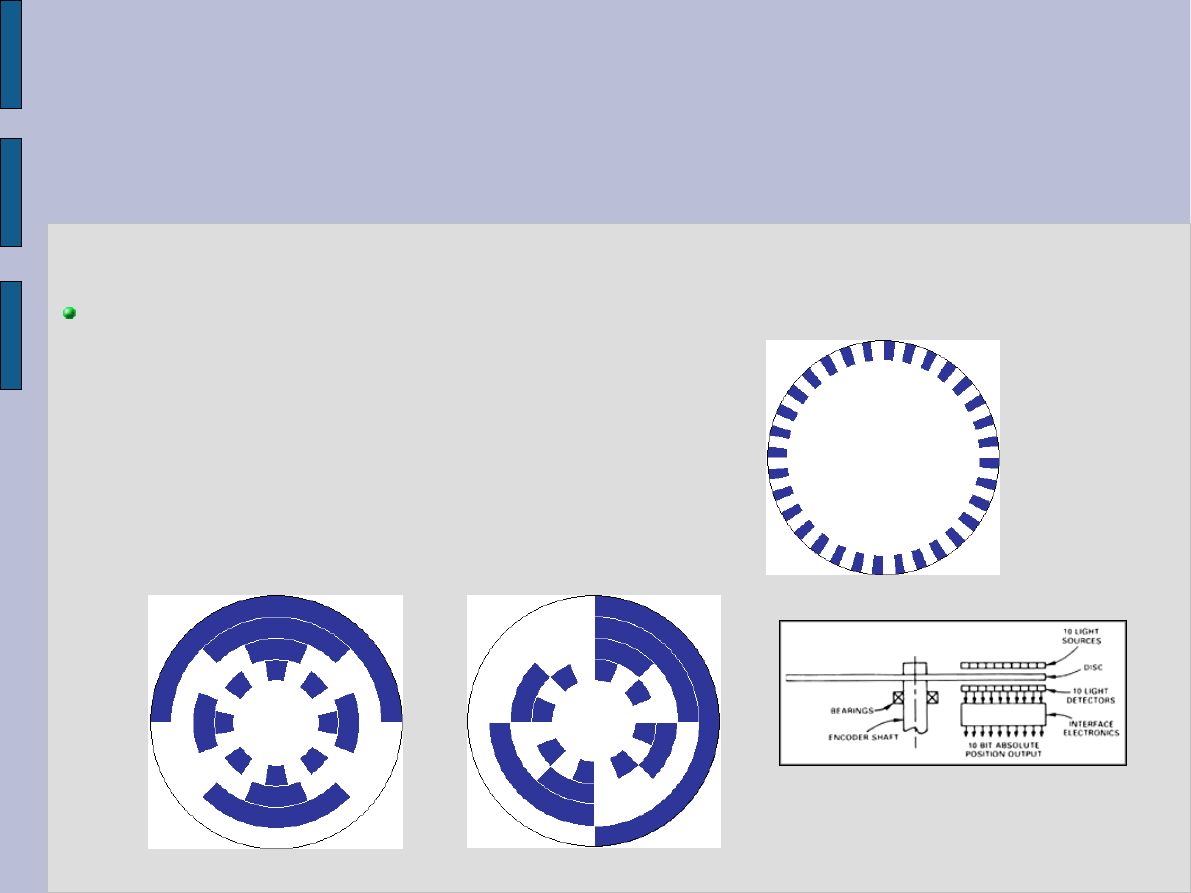
Czujniki aktywne – Przykłady
Czujniki obrotu
Enkodery optyczne
- inkrementacyjne
- bezwzgledne
www.suc-tech.com/technology/e9.gif
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
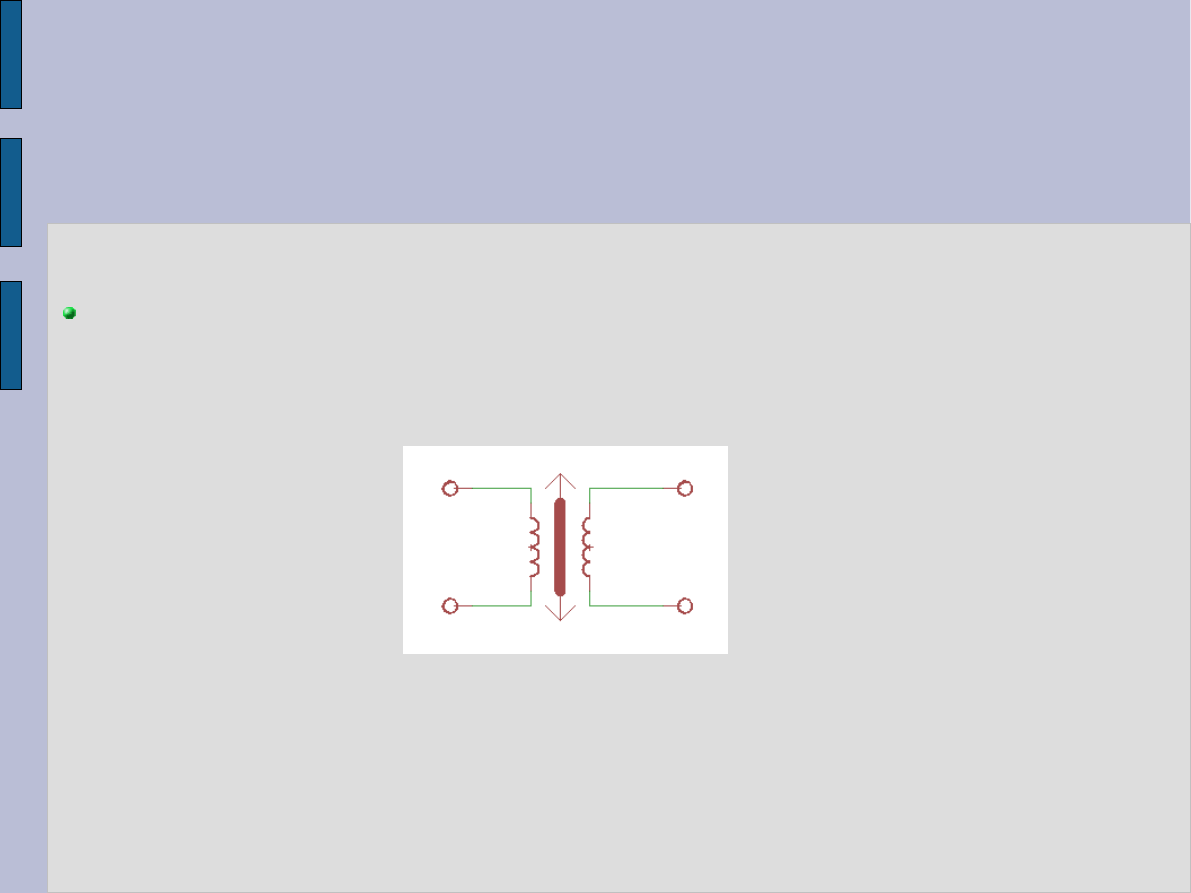
Czujniki aktywne – Przykłady
Czujniki przemieszczenia położenia
Liniowe transformatory różnicowe (brak tarcia)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki aktywne – Przykłady
Czujniki ruchu:
Czujniki ultradźwiękowe
-Efekt Dopplera
-Interferencje
-Błędy pomiaru kąta nachylenia
Odbiornik
Nadajnik
f
f+df
V
Zmysł
Organ
Dziedzina
wzrok
oko
optyka
słuch
ucho
akustyka
węch
nos
chemia
dotyk
skóra
mechanika
smak
język
chemia
temperatura skóra
fizyka
wiatr
włosy
dynamika
równowaga ucho środkowe mechanika
ciało
mięśnie, stawy mechanika
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki a ludzkie zmysły
Inne zmysły zwierząt: pole magnetyczne, echolokacja, ciśnienie wody
Fuzja sensorów:
Człowiek – temperatura rzeczywista a odczuwalna
Jeden sensor:
●
niepełna interpretacja otoczenia
●
niepewność, błąd pomiaru
●
możliwość pomiaru niektórych wartości
Łączenie informacji pochodzącej z różnych
sensorów, pozwalające na oszacowanie określonych
cech otoczenia
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – fuzja sensorów
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – układy sensoryczne
Układ sensoryczny – zestaw czujników danej
maszyny lub systemu.
Rzeczywista ocena środowiska często wymaga
realizacji odpowiedniej liczby pomiarów oraz
zbiorczej ich analizy.

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – układy sensoryczne – przykłady
Aktywny zderzak
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – układy sensoryczne – przykłady
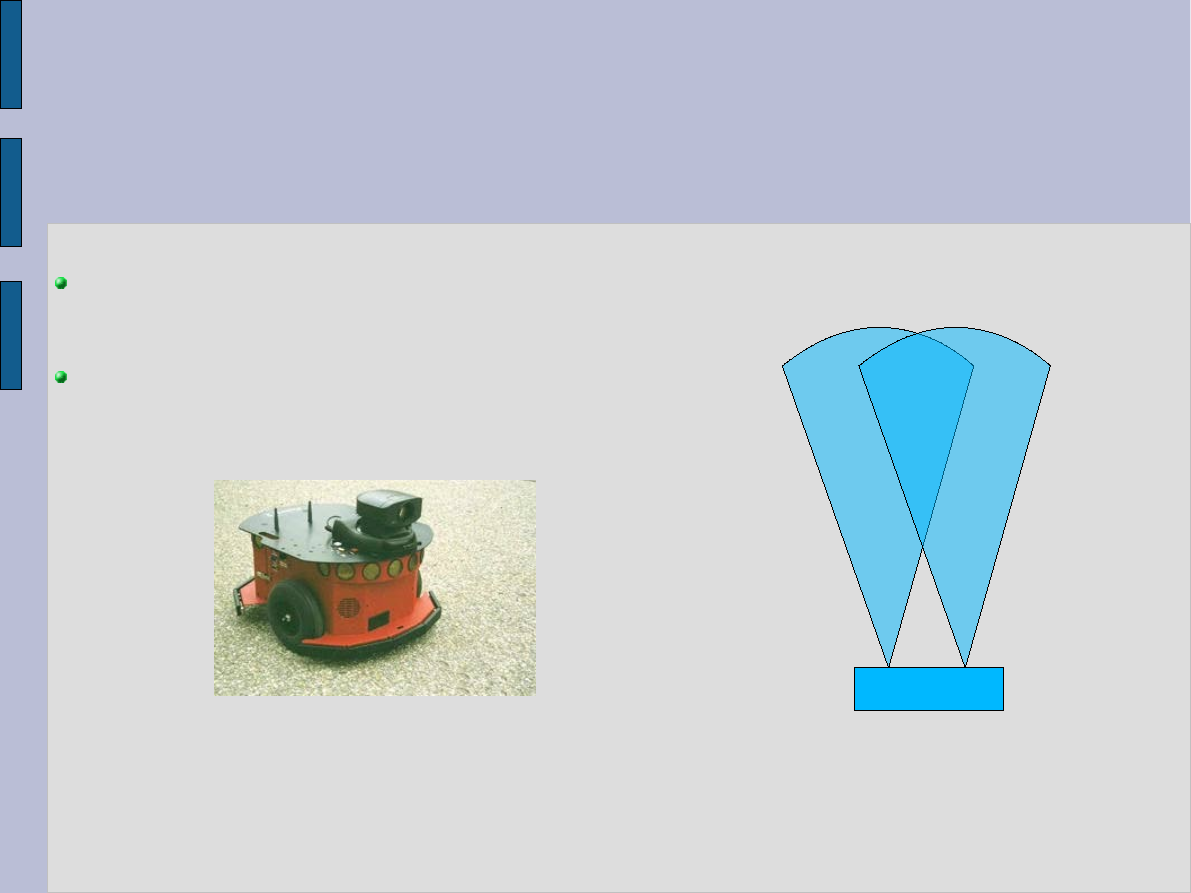
Aktywny zderzak
Sonarowy czujnik odległości
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – układy sensoryczne – przykłady
Aktywny zderzak
Sonarowy czujnik odległości
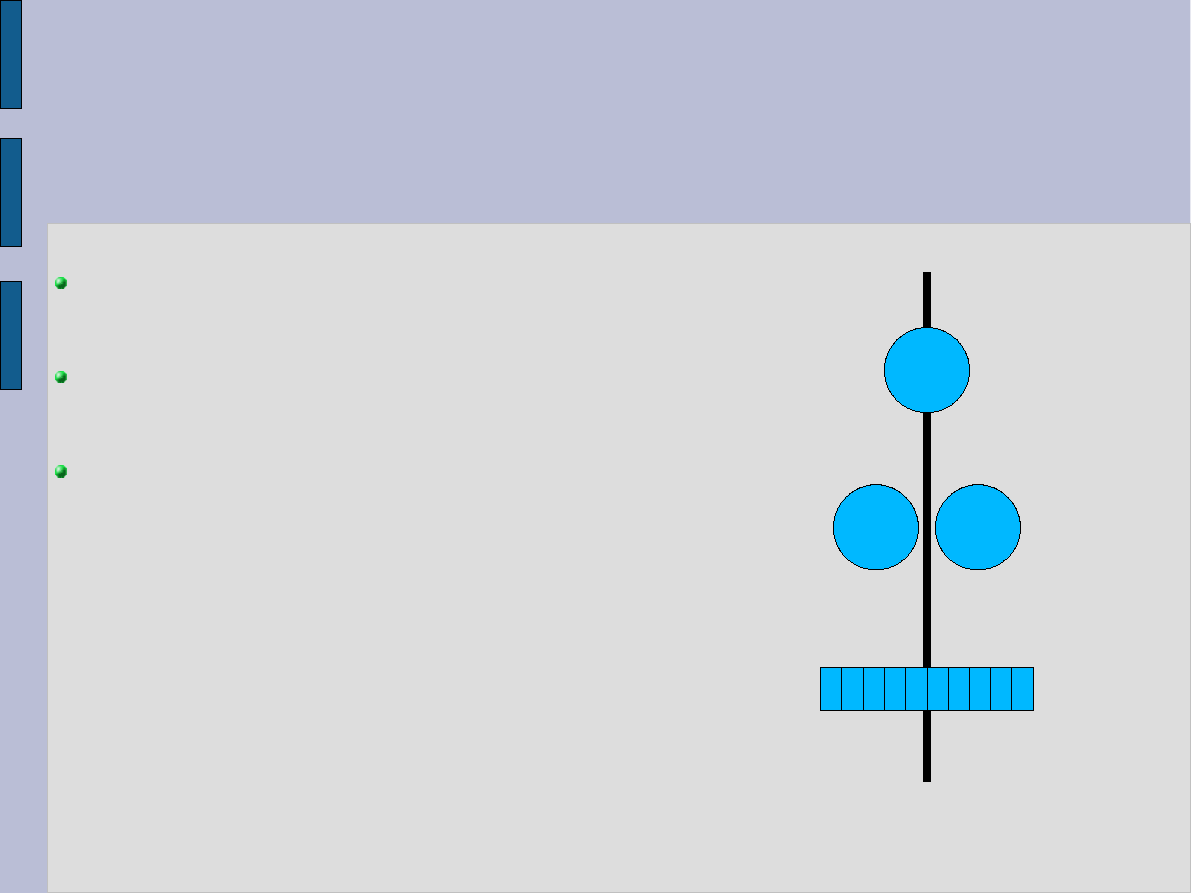
Identyfikator linii
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – układy sensoryczne – przykłady
Aktywny zderzak
Sonarowy czujnik odległości
Identyfikator linii
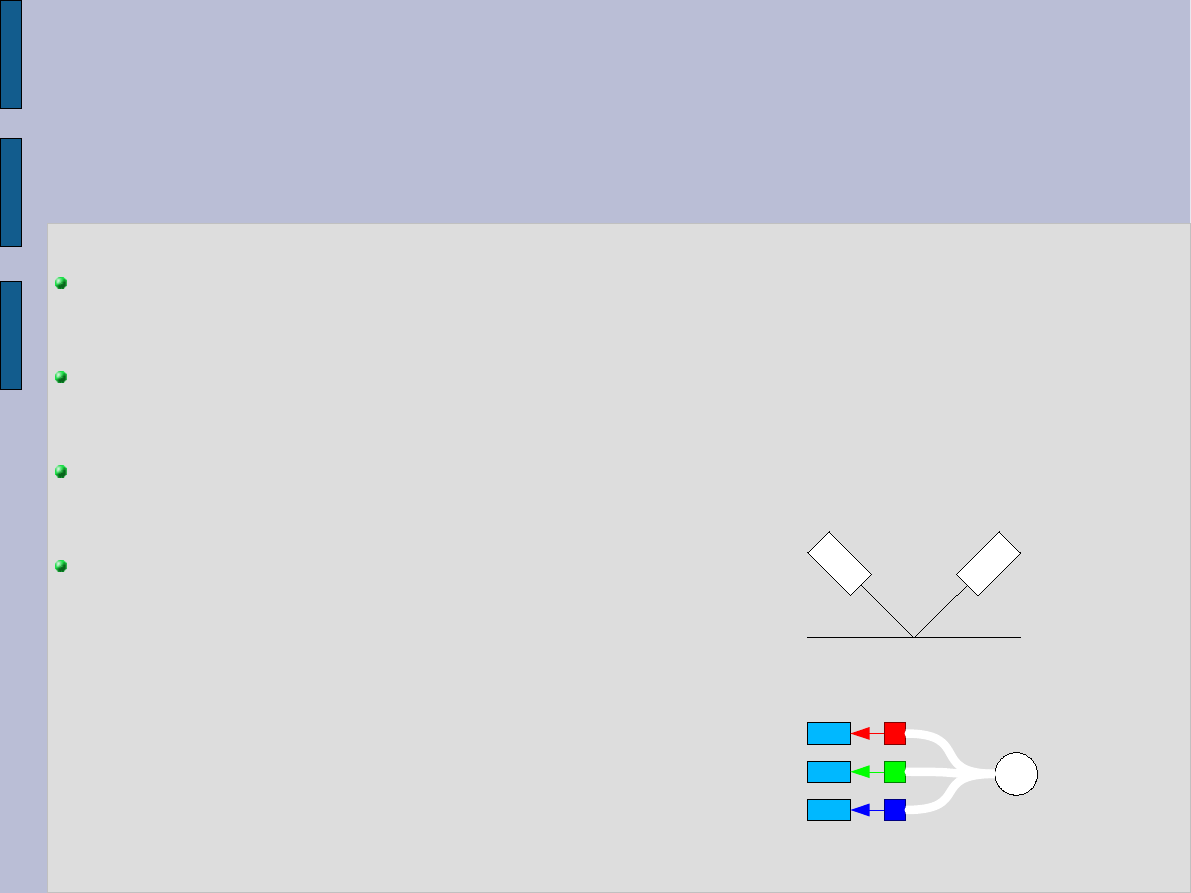
Układ do pomiaru barwy powierzchni
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe
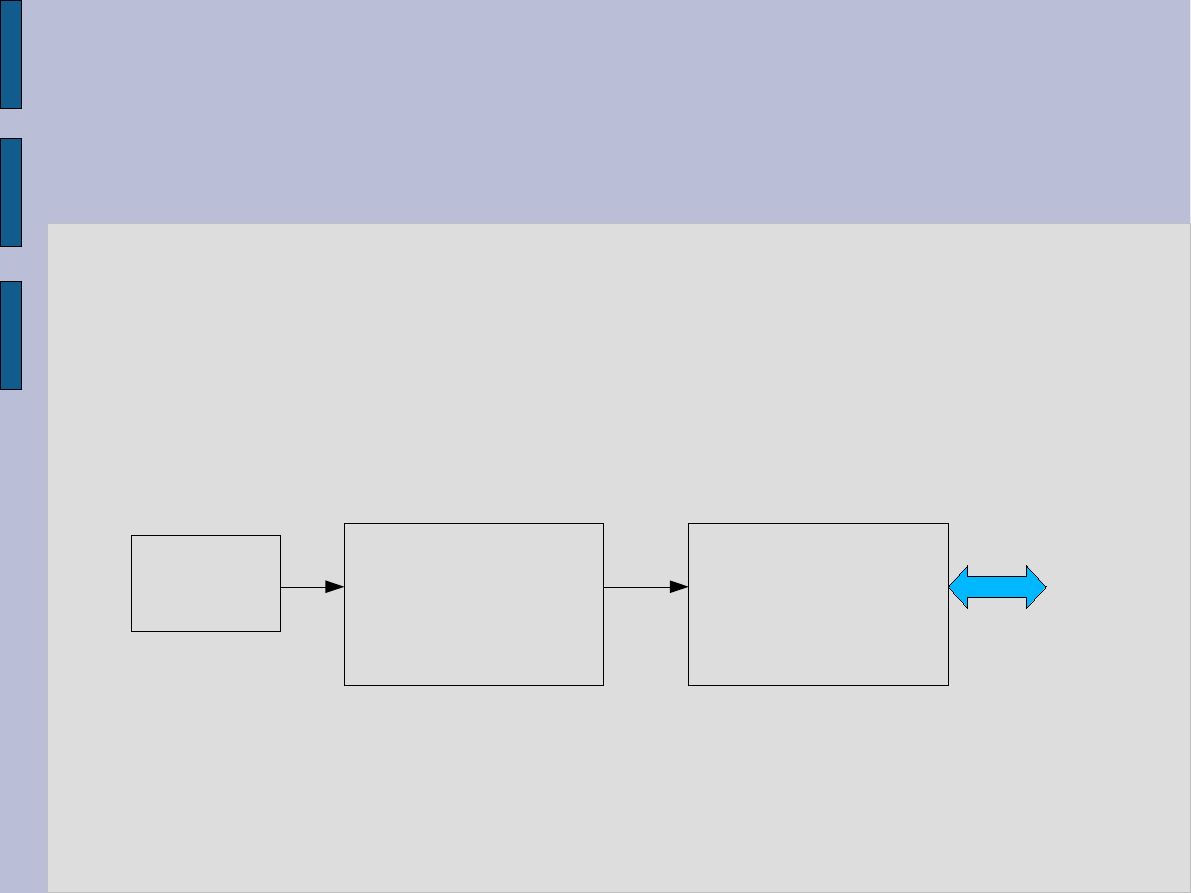
Przetworniki pomiarowe to zamknięte w jednej obudowie
urządzenia wyposażone w czujnik, układ kondycjonujący
sygnał oraz układ telemetryczny.
Sensor
Układ
kondycjonujący
Układ
telemetryczny
uC
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe
Kondycjonowanie sygnału polega na poprawianiu jego
własności czy stanu.
Do układów kondycjonowania sygnału zaliczamy:
Układy filtrujące i odszumiające
Układy przetwarzające sygnał wyjściowy czujnika na napięcie
lub prąd
Wzmacniacze i układy dopasowujące poziomy i kształt sygnału
Przetworniki A/C
Uogólniając: sygnał wychodzący z układu kondycjonującego jest
przygotowany do dalszej obróbki.

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe
Układy telemetryczne służą do przesyłu wartości
wynikowych na odległość, do urządzenia sterującego
bądź rejestrującego.
Do układów telemetrycznych zaliczamy:
Układy kodowania i modulowania sygnału
Układy komunikacyjne (nadajnik, odbiornik)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe
Podsumowanie
Przetworniki pomiarowe oferowane dzisiaj na runku
układów elektronicznych są często urządzeniami
autonomicznymi.
Scalone układy czujników mogą realizować pomiar
kilku wielkości fizycznych jednocześnie oraz rejestrować
wyniki realizowanych pomiarów.
Najbardziej zaawansowane czujniki scalone to urządzenia
autonomiczne z własnym niezależnym zasilaniem oraz
układami zapewniającymi komunikację (bezprzewodową)
z innymi elementami sieci czujników pomiarowych.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
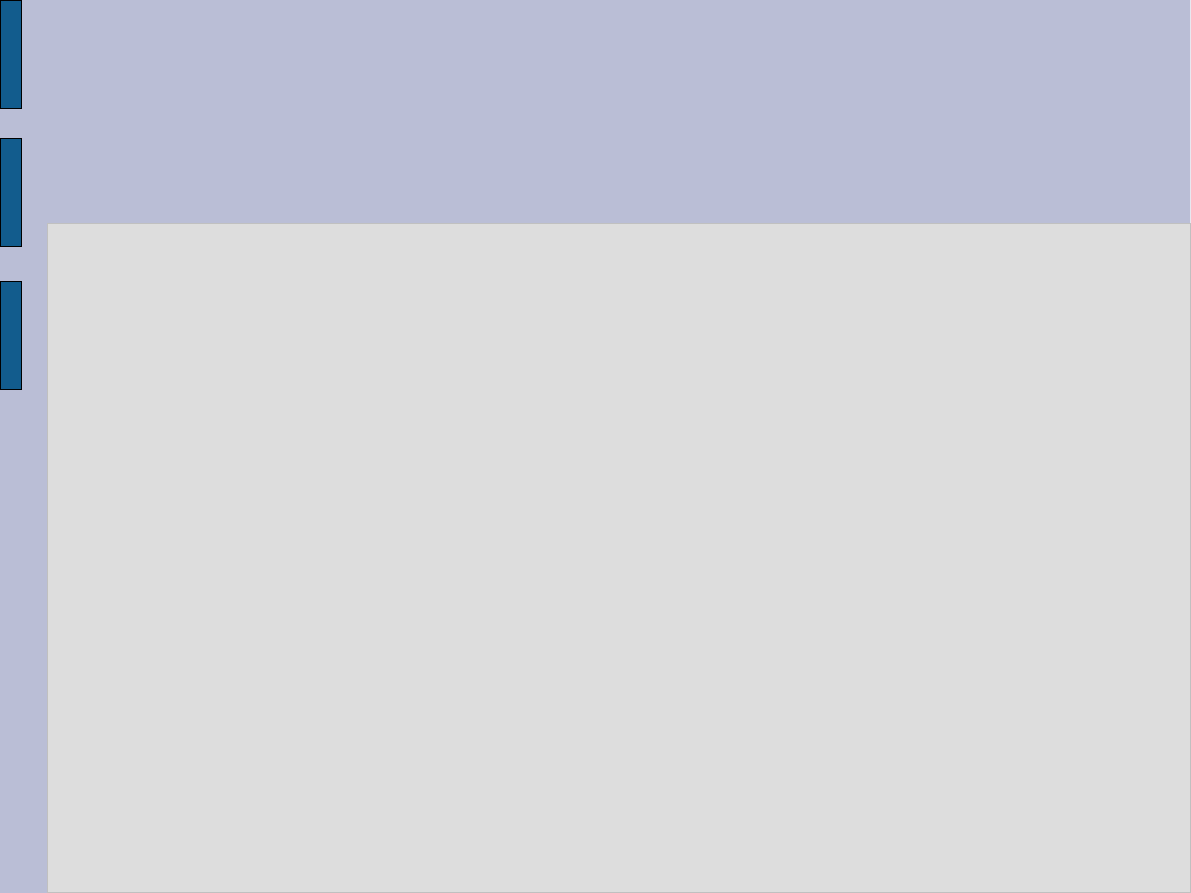
Czujniki – przetworniki pomiarowe – pomiar orientacji
Kompas
Pomiar mechaniczny
Pomiar wykorzystujący efekt Halla
Honeywell
MEMSIC SEGURO
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
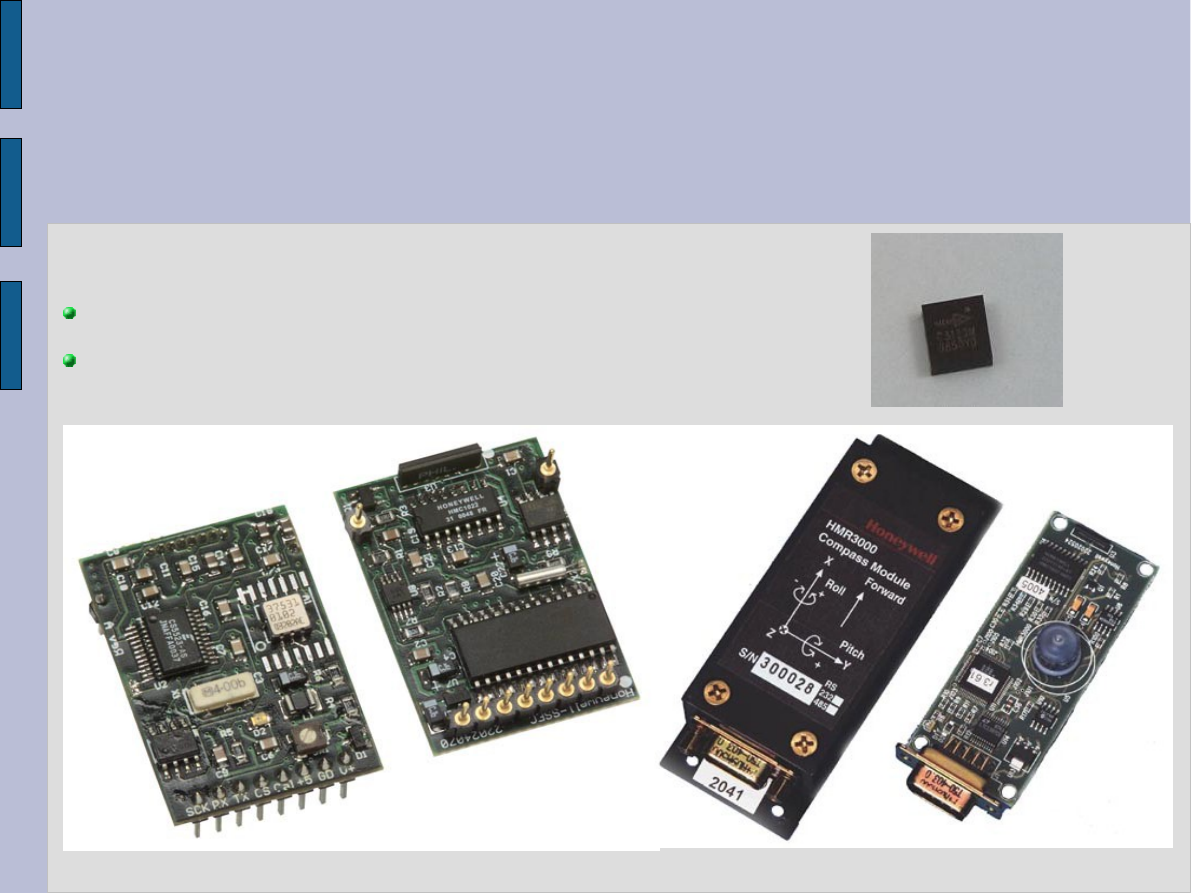
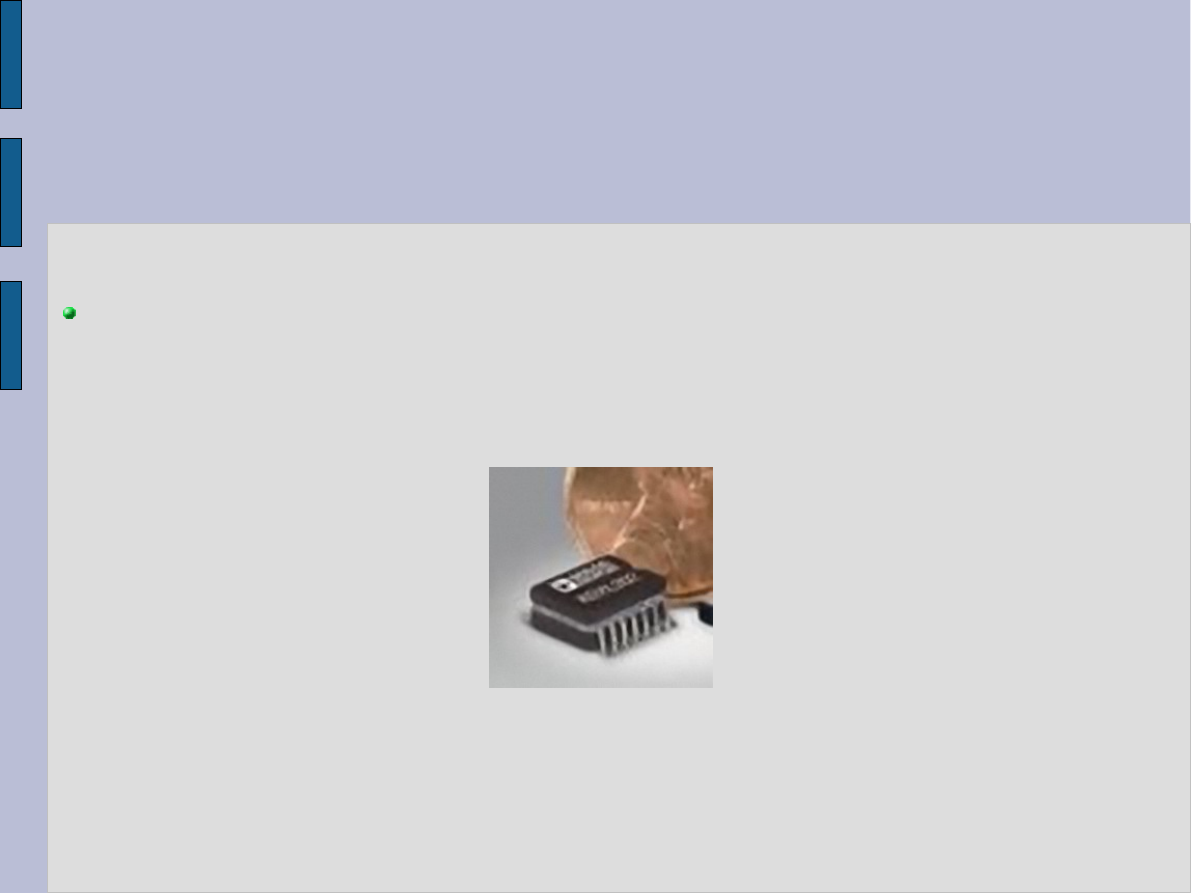
Czujniki – przetworniki pomiarowe – pomiar orientacji
Żyroskop
Inercja obracającej się masy
Elektroniczny układ scalony
Wikipedia
ANALOG DEVICES
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe – pomiar orientacji
Inklinometr, akcelerometr
Elektroniczny układ scalony
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
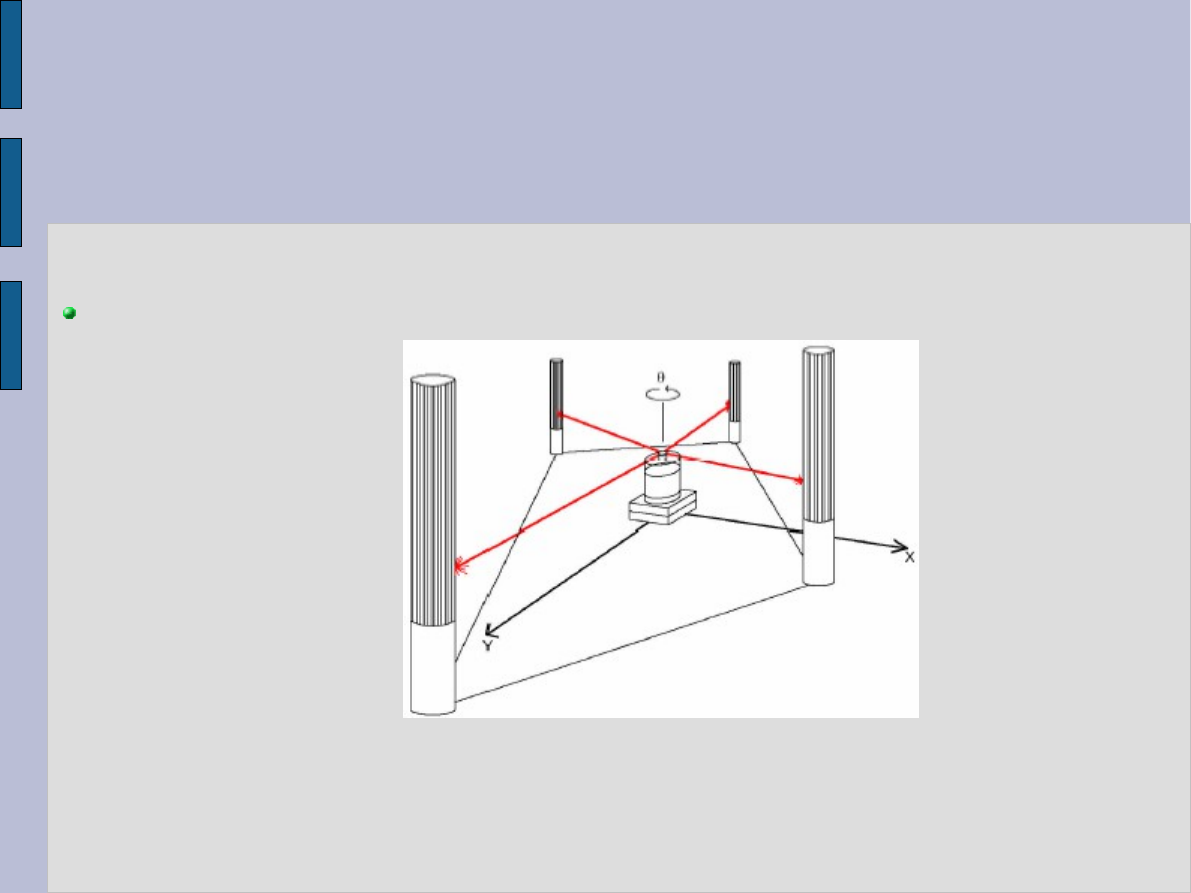
Czujniki – przetworniki pomiarowe – lokalizacja
Lokalizacja
Znaczniki
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
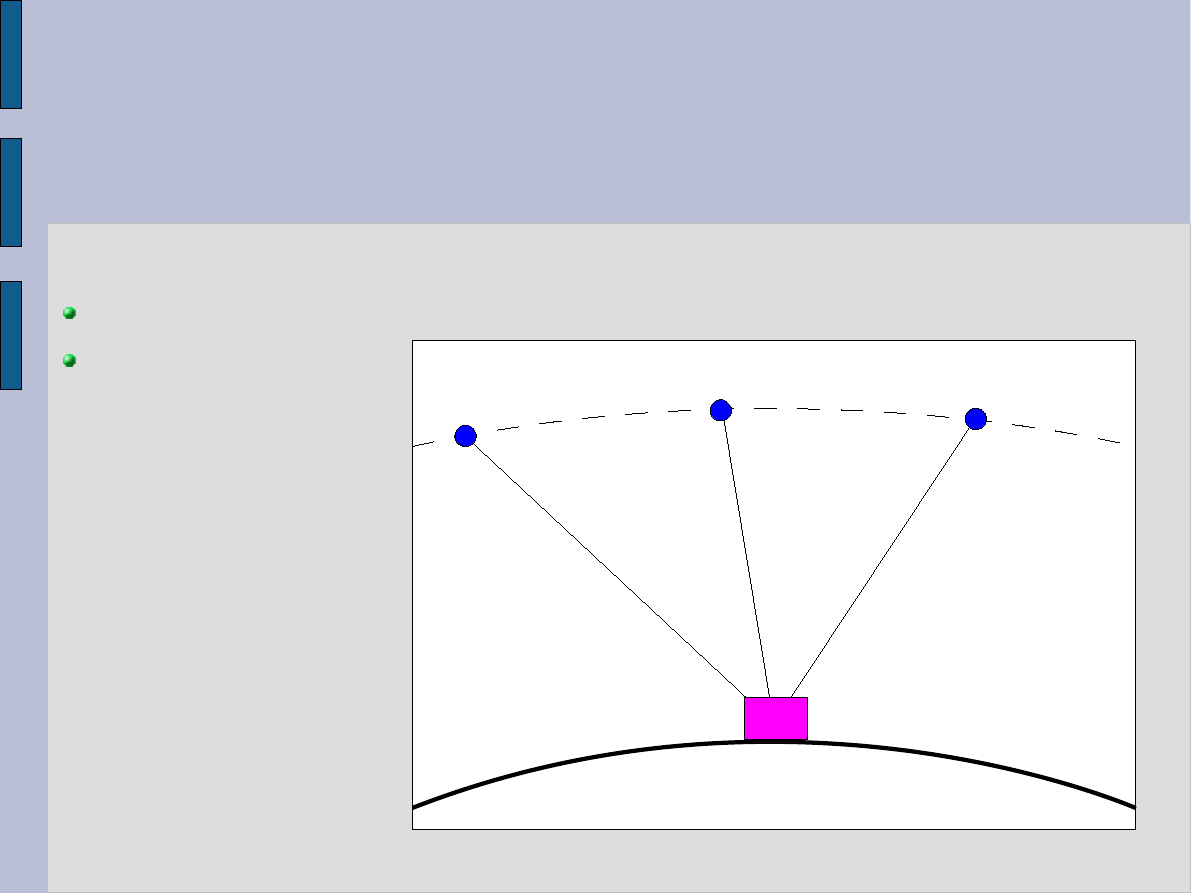
Czujniki – przetworniki pomiarowe – lokalizacja
Lokalizacja
Znaczniki
GPS

Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe – czujniki odległości
Czujniki odległości na podczerwień.
Point of Reflection
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
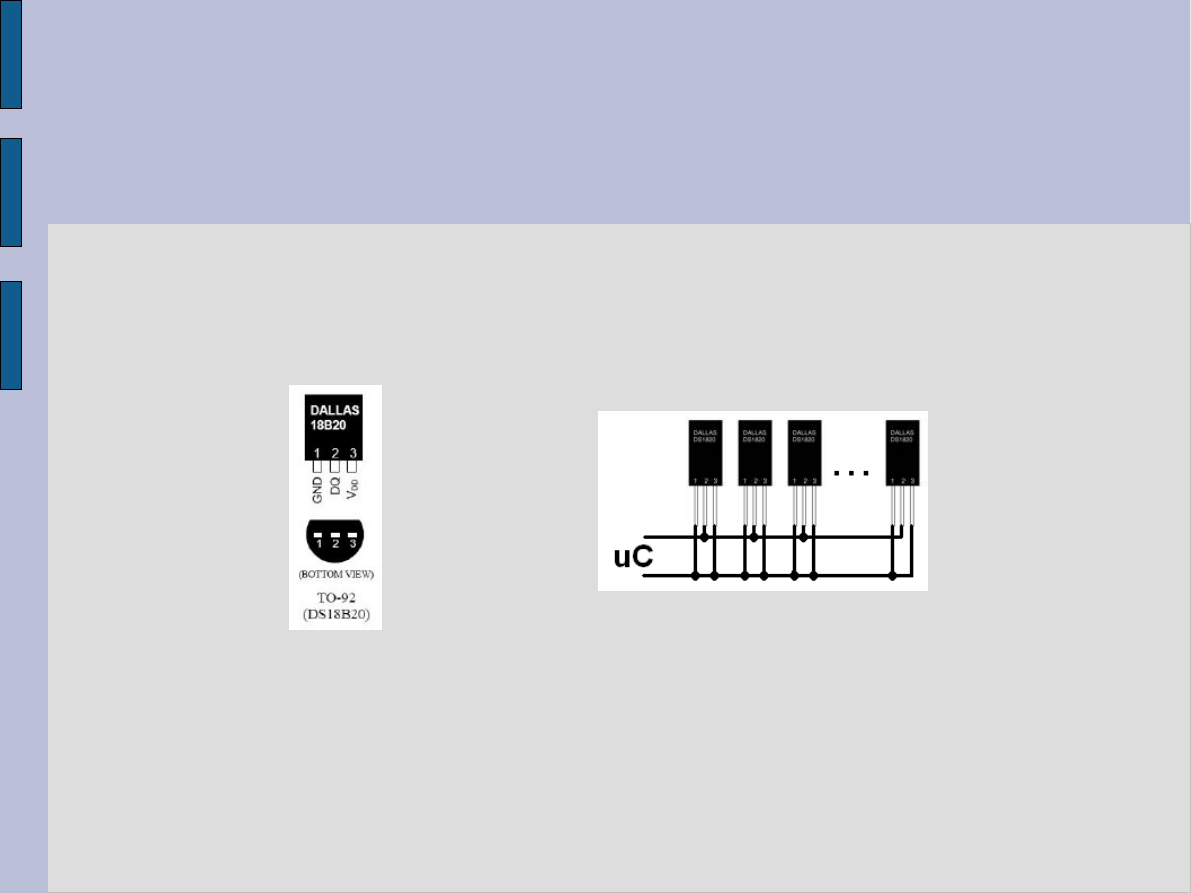
Czujniki – przetworniki pomiarowe – czujniki temperatury
Czujniki temperatury (1Wire).
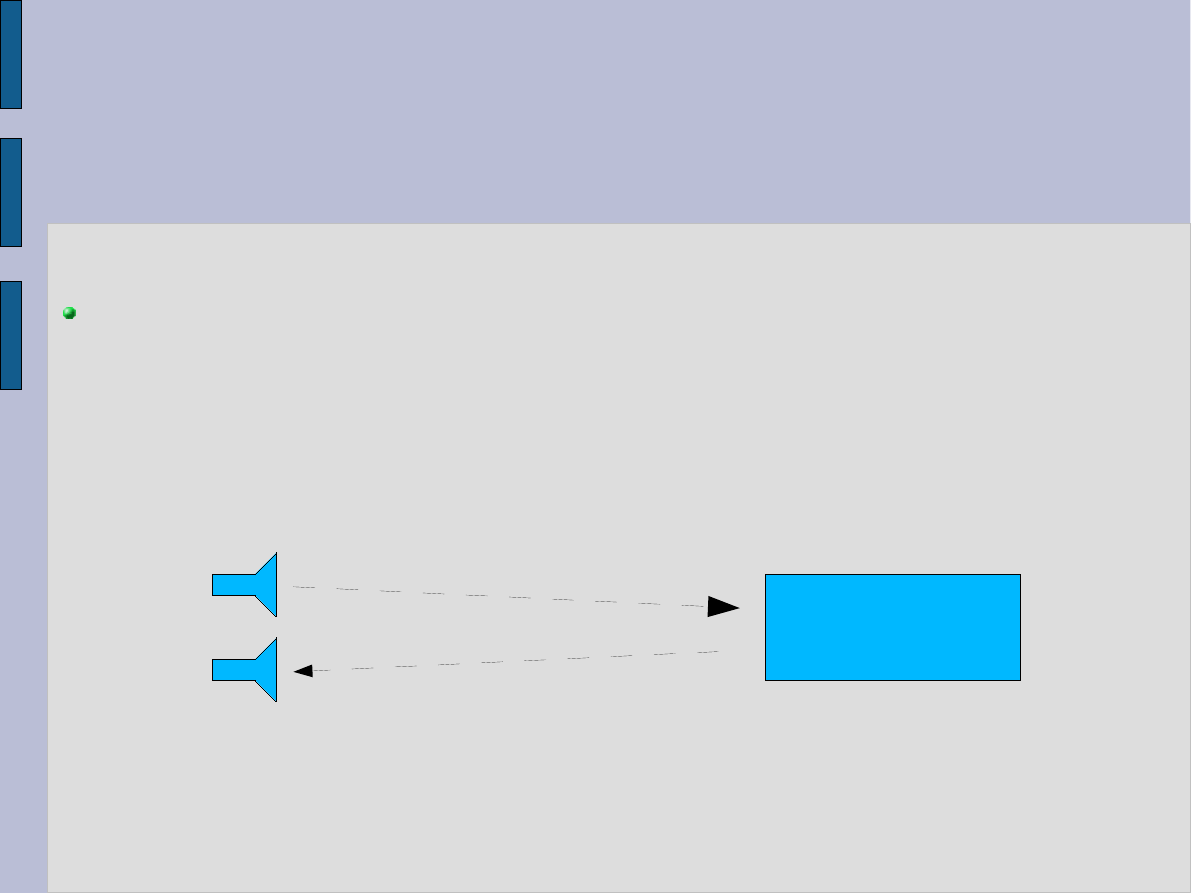
Czujniki odległości:
Czujniki ultradźwiękowe
Odbiornik
Nadajnik
f
f+df
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe – czujniki odległości
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
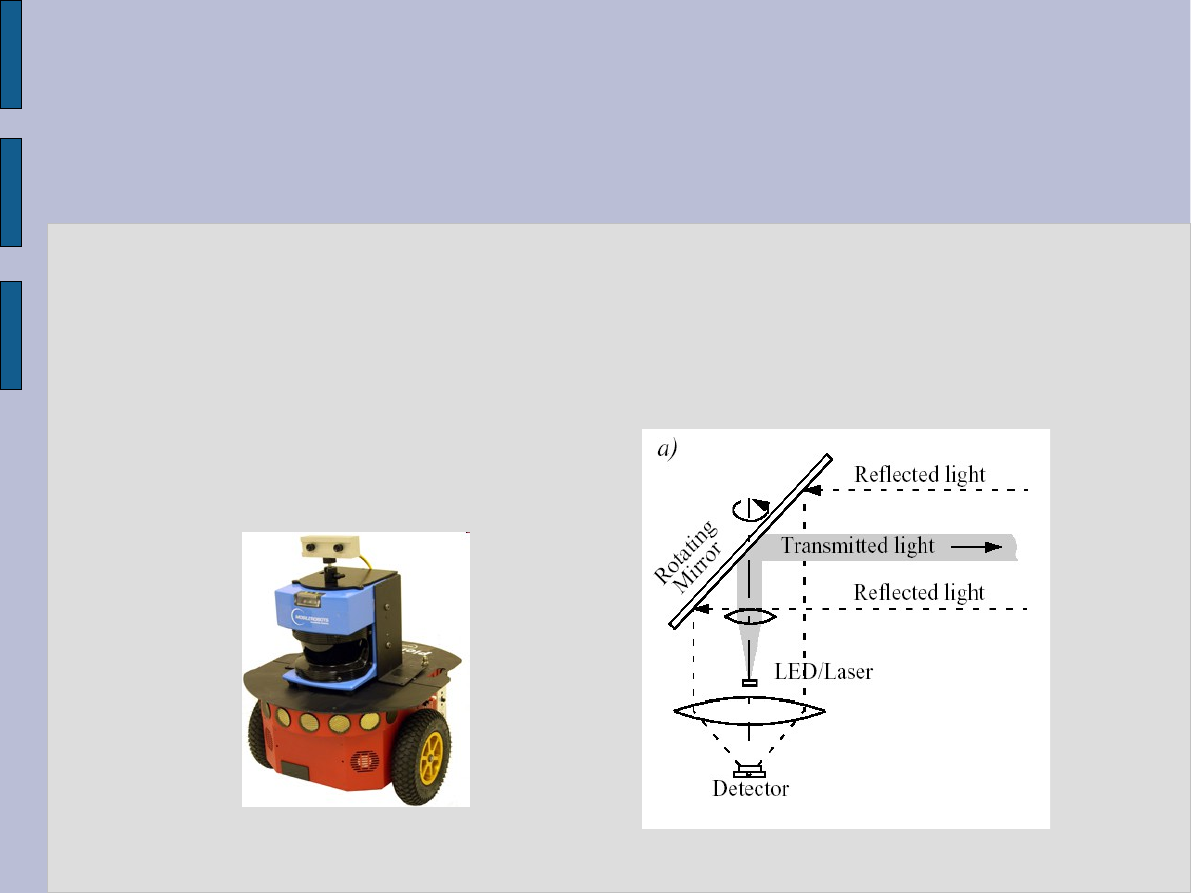
Czujniki – przetworniki pomiarowe – czujniki odległości
Lidar – laserowy miernik odległości
●
Pomiar czasu odbicia impulsu: 30 cm/ns
●
Duża dokładność i częstotliwość pomiarów
●
Zakres: 0-200 m
●
Wysoki koszt

Kamery:
●
CCD
●
CMOS
Systemy wizyjne:
●
Wykrywanie przedmiotów
●
Wykrywanie i określanie ruchu
●
Śledzenie
●
Rekonstrukcja sceny
●
Nawigacja i mapowanie
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe – kamery
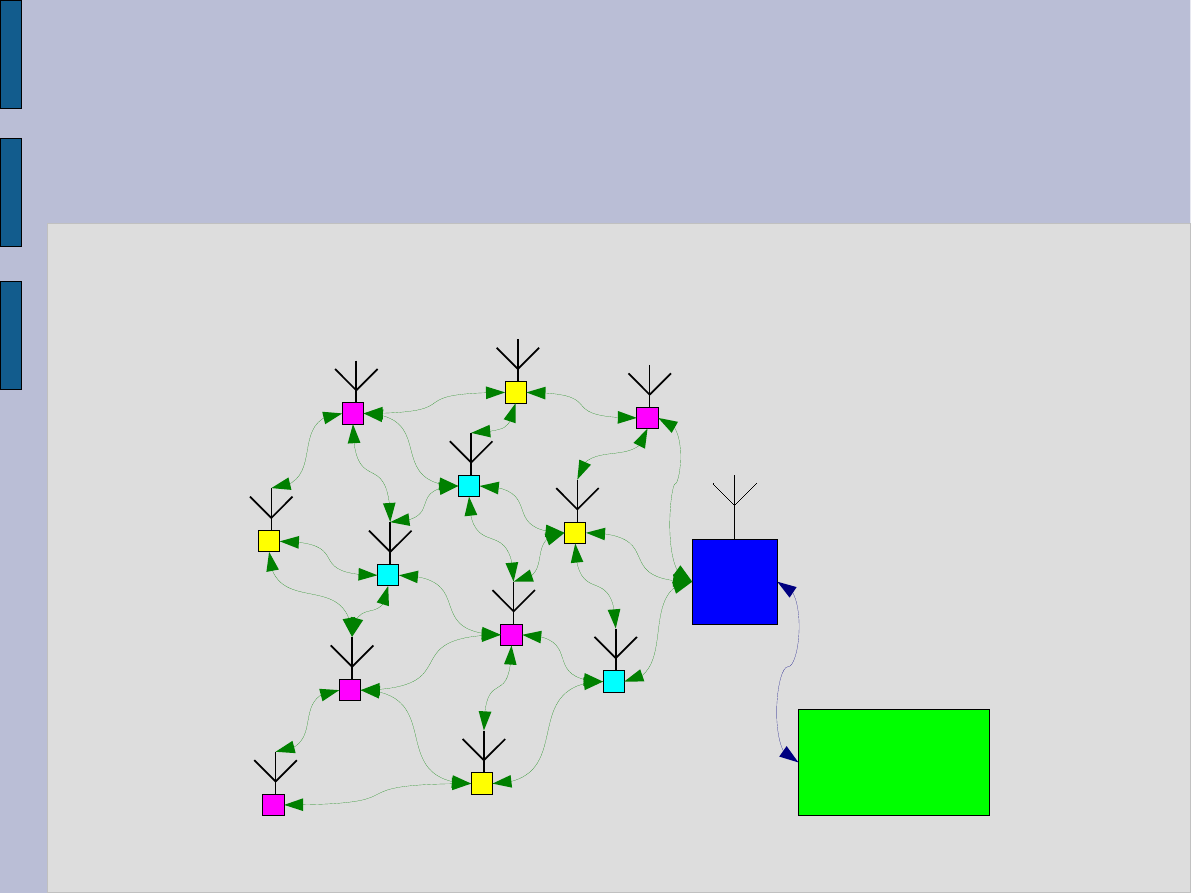
Autonomiczne czujniki bezprzewodowe:
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Czujniki – przetworniki pomiarowe – sieć czujników
OPERATOR
`
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
- Slajd 43
- Slajd 44
- Slajd 45
- Slajd 46
- Slajd 47
- Slajd 48
- Slajd 49
- Slajd 50
Wyszukiwarka
Podobne podstrony:
3013
3013
3013
3013
3013
066 200 kantat J S Bacha Kantata BWV 100 Was Gott tut, das ist wohlgetan (III) (22 12 3013)
WDRM 6 2013
3013 1 Space Jet
Kay Gregory A Perfect Beast [HR 3016, MB 3013] (docx)
3013
WDRM 4 2013
WDRM 5 2013
więcej podobnych podstron