Wprowadzenie do robotyki
mobilnej
Komunikacja
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja
Komunikacja to proces wymiany informacji
między jego uczestnikami.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja
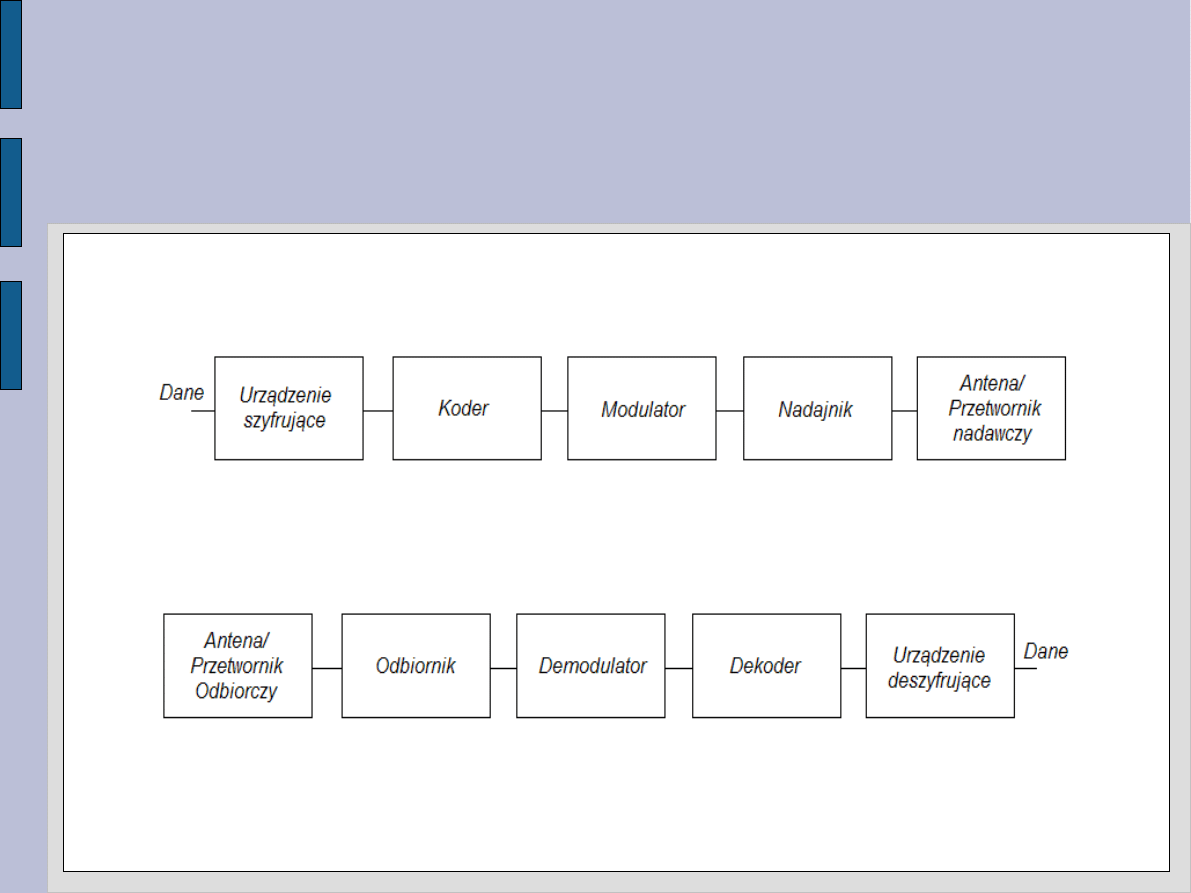
Protokół
Protokół,
Kodowanie, Szyfrowanie
Modulacja, Przetwarzanie
Protokół,
Kodowanie,
Przetwarzanie
Protokół,
Kodowanie, Szyfrowanie
Modulacja, Przetwarzanie
1
2
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
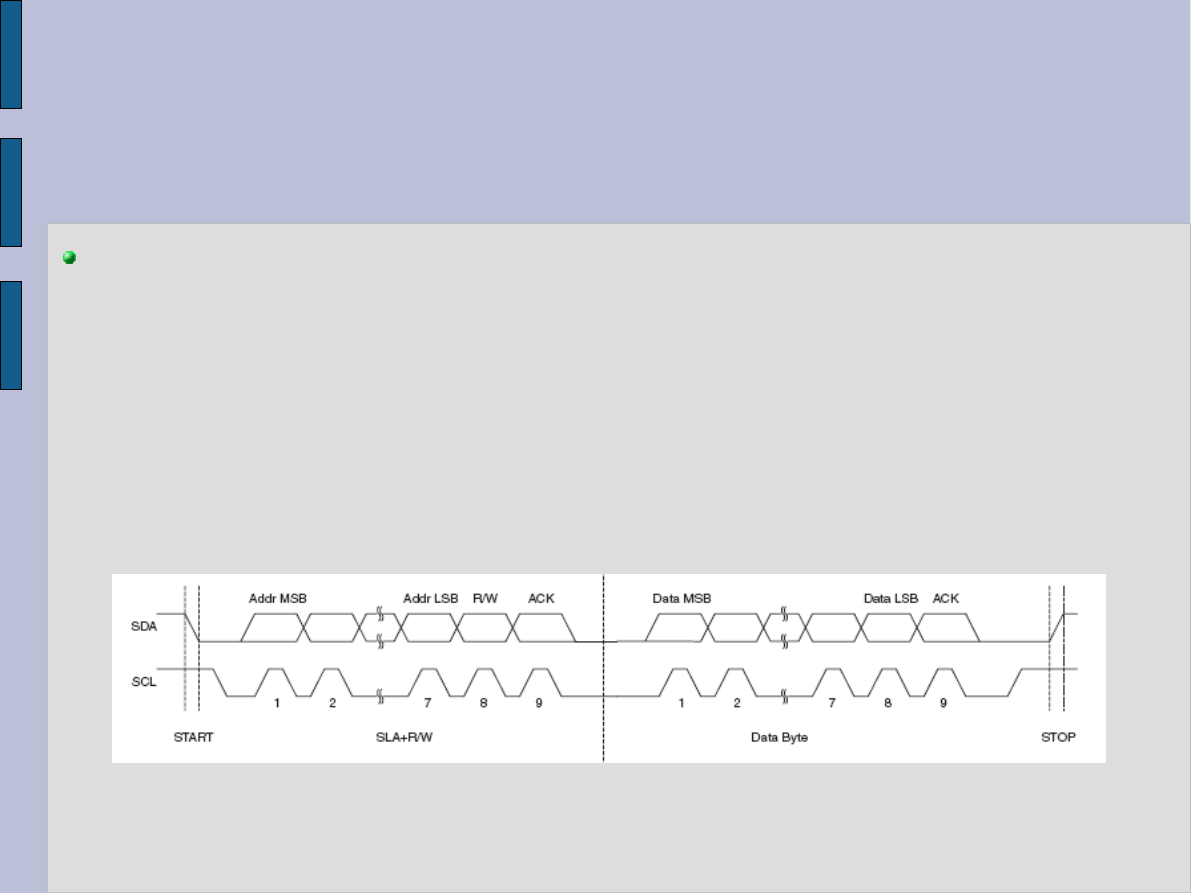
Komunikacja synchroniczna dwuprzewodowa.
SDA – Linia danych
SCL – Linia zegara
Komunikacja typu master slave. Dokładnie jedno urządzenie (master)
zarządzające pracą pozostałych (slave). Master zarządza transmisją.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
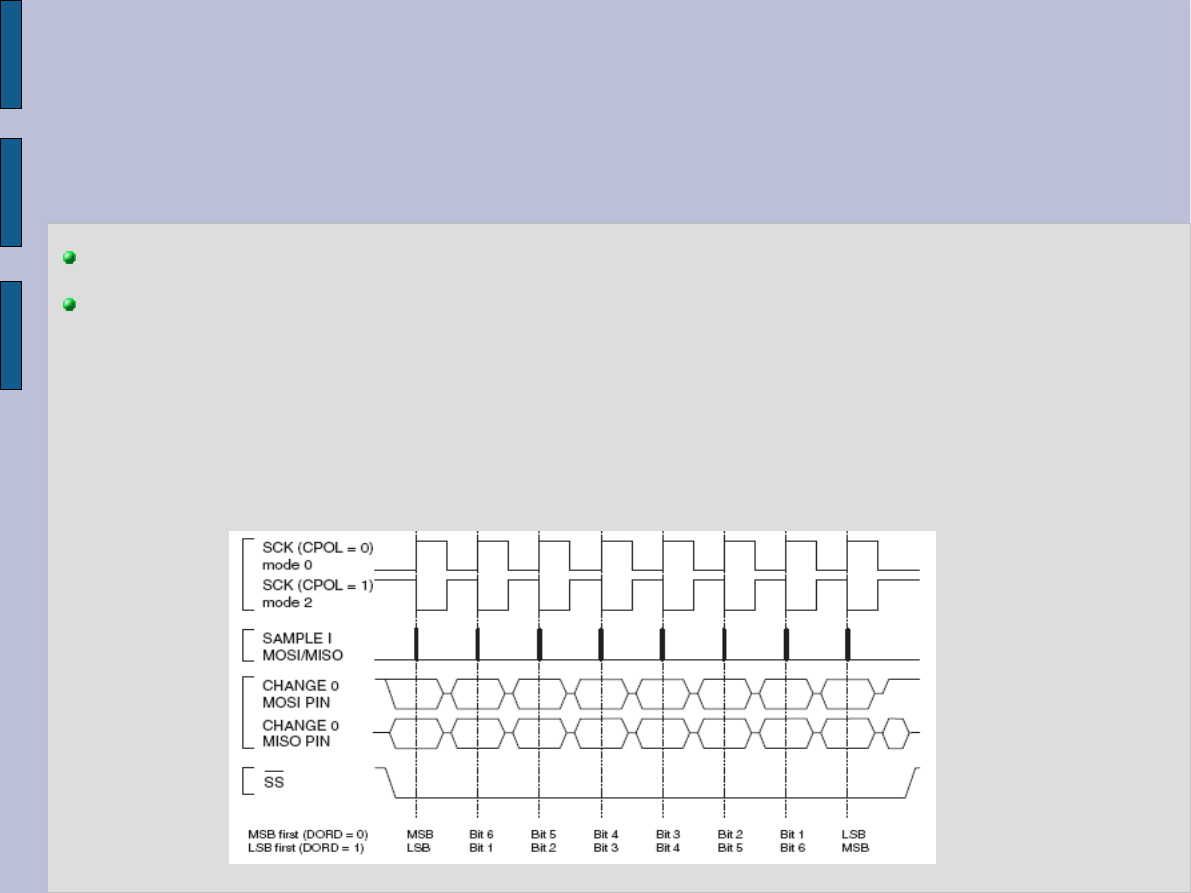
SPI
Komunikacja synchroniczna (Serial Peripheral Interface).
MISO – Master Input Slave Output
MOSI – Master Output Slave Input
SCK – Zegar
SS - Synchronizacja
Komunikacja typu master slave. Przesyłane są tylko dane bez adresu.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
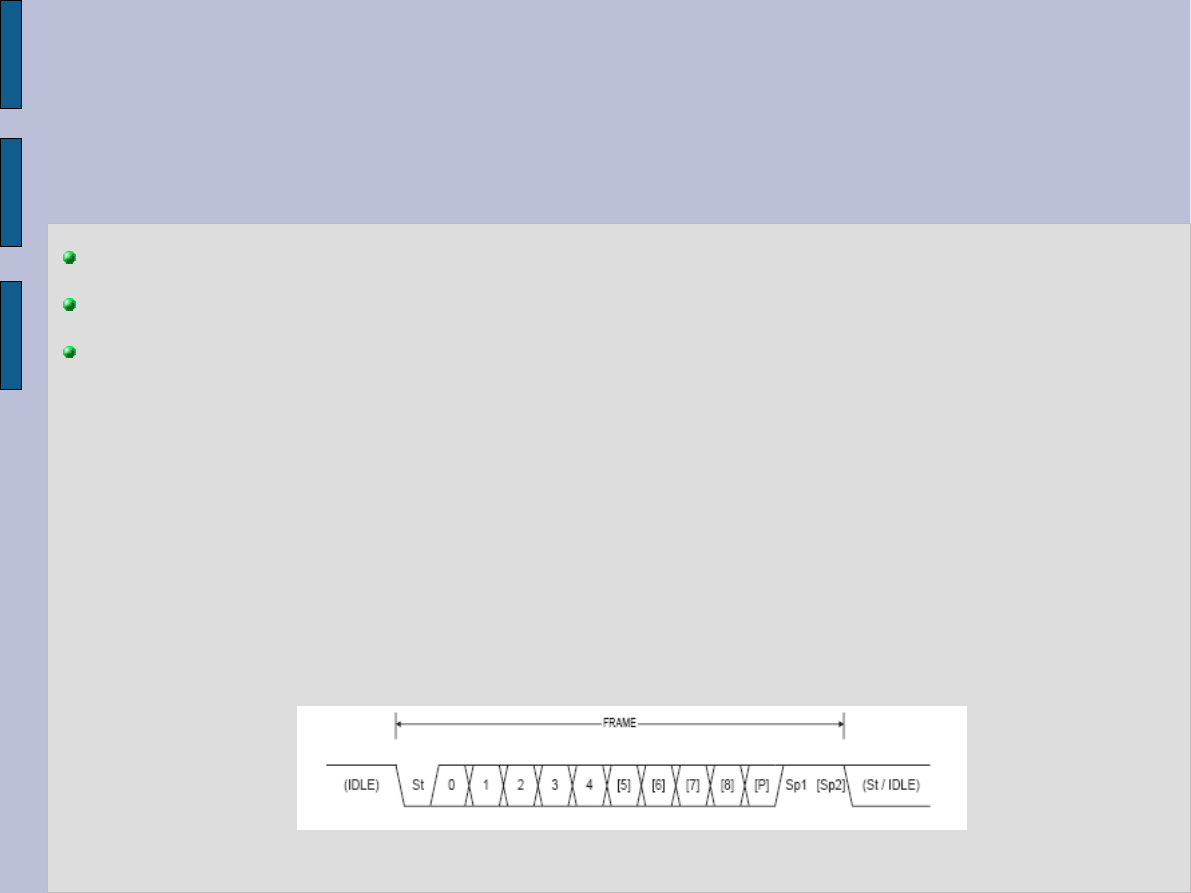
RS232
RS232 - USART Universal Synchronous and Asynchronous serial Receiver and
Transmitter.
RxD – Wejście
TxD – Wyjście
XCK – Konfigurowalny zegar
Synchroniczna bądź asynchroniczna komunikacja szeregowa.
Zdefiniowane w układach komputerowych prędkości transmisji
max=115,2kBps.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
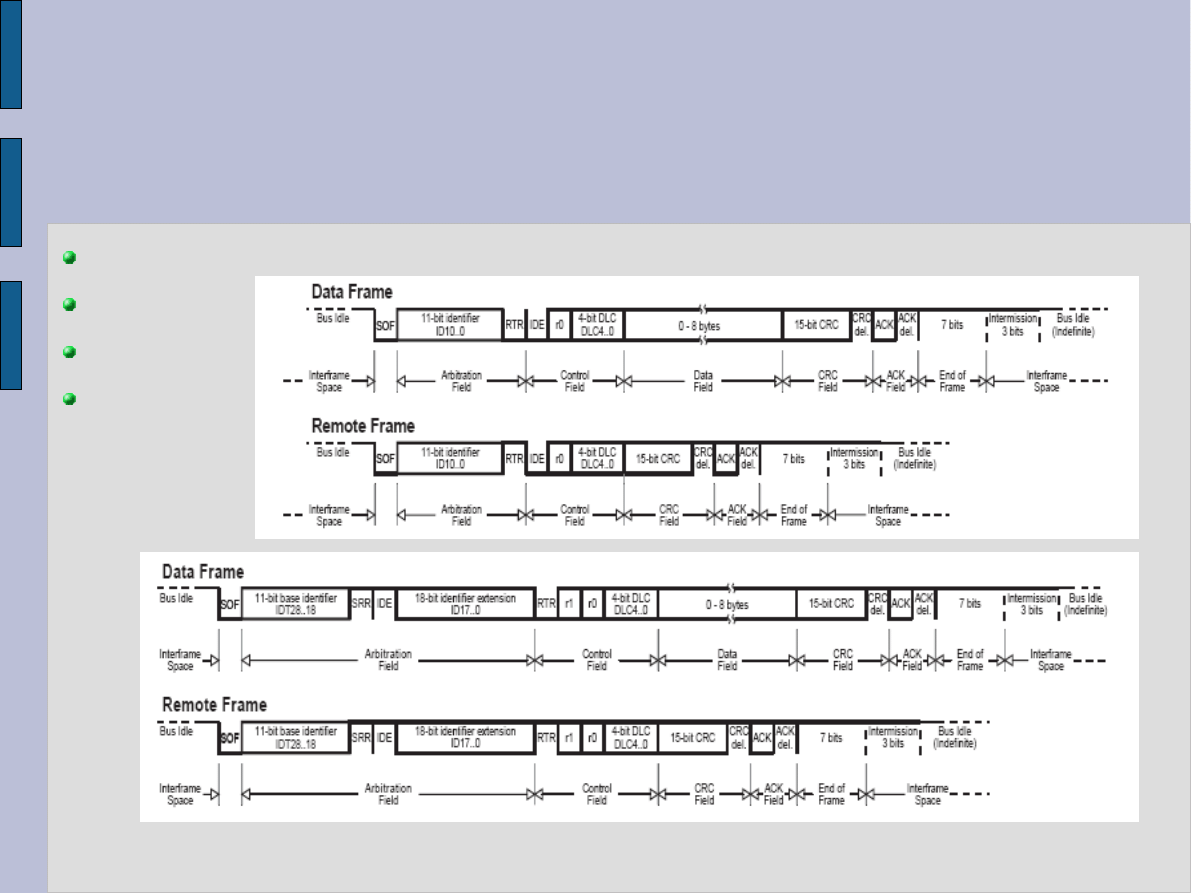
CAN
Controller Area Network to asynchroniczna szyna danych.
Protokół CAN jest zdefiniowany w ISO11898 dla high speed i ISO11519-2 dla
low speed.
Sama komunikacja odbywa się poprzez dwie linie:
RxD – Wejście
TxD – Wyjście
11/19-bitowy identyfikator i 11/19-bitowa maska
Praktyczna realizacja poprzez skrętkę dwóch przewodów.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
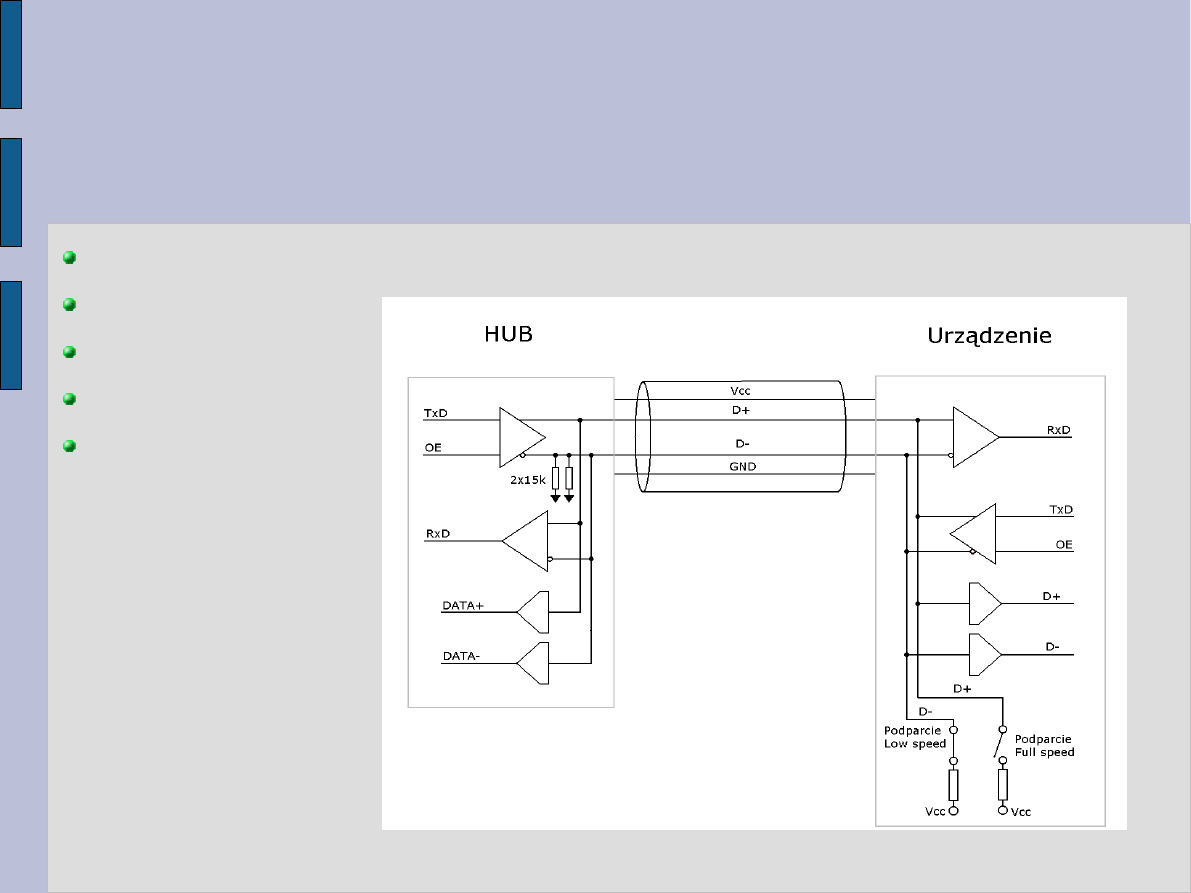
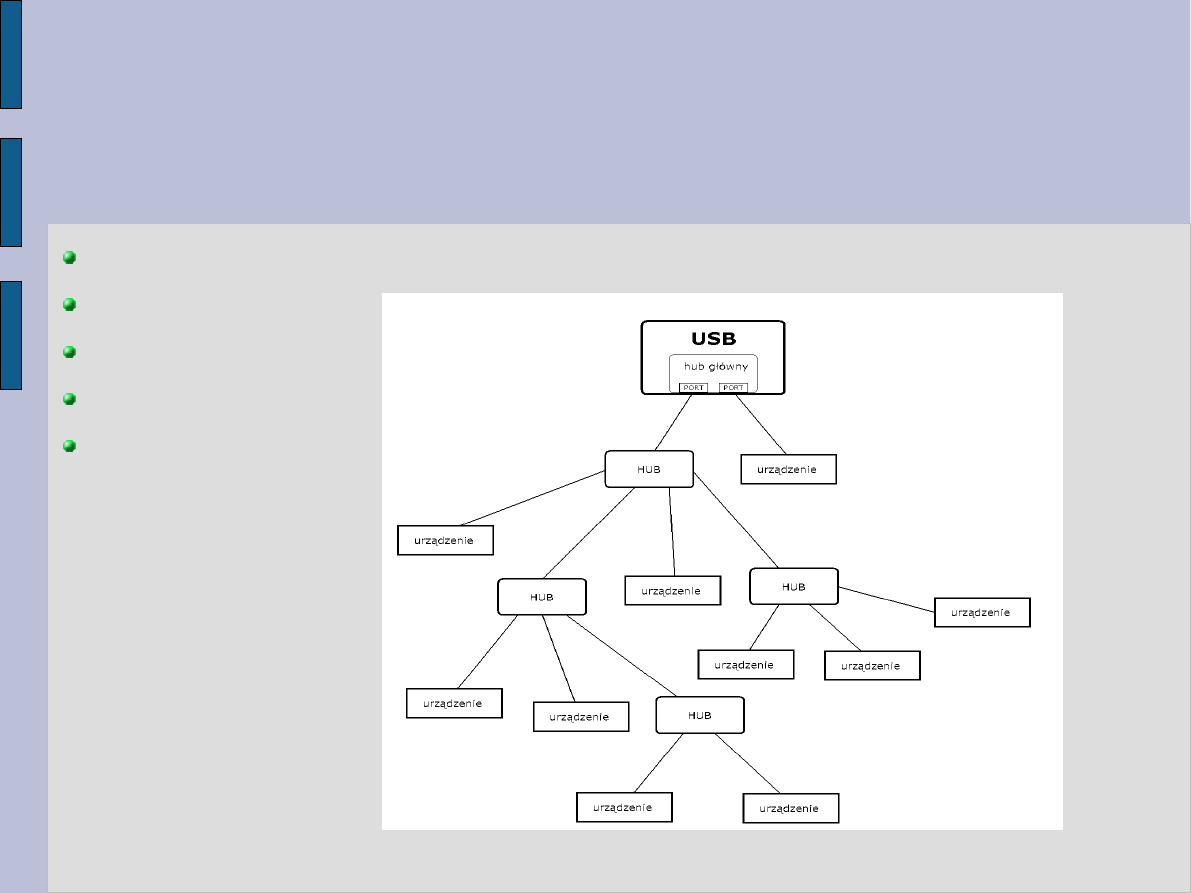
USB
Uniwersalny interfejs szeregowy przeznaczony do współpracy komputerów z
urządzeniami przemysłowymi oraz powszechnego użytku.
Standardy USB:
low speed – 1,5Mb/s,
full speed – 12Mb/s,
high speed – 480Mb/s (USB2.0),
SuperSpeed – 4,7Gb/s do 5Gb/s (USB3.0) osiągana 3,2Gb/s,
Planowane rozszerzenie SuperSpeed do 10Gb/s.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
USB
Low speed:
D+ = 0V,
D- = 0,9Vcc
((D+)-(D-)<-200mV
== „0”)
Full speed:
D+ = 0,9Vcc,
D- = 0Vcc
((D+)-(D-)>200mV
== „1”)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
USB
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
USB
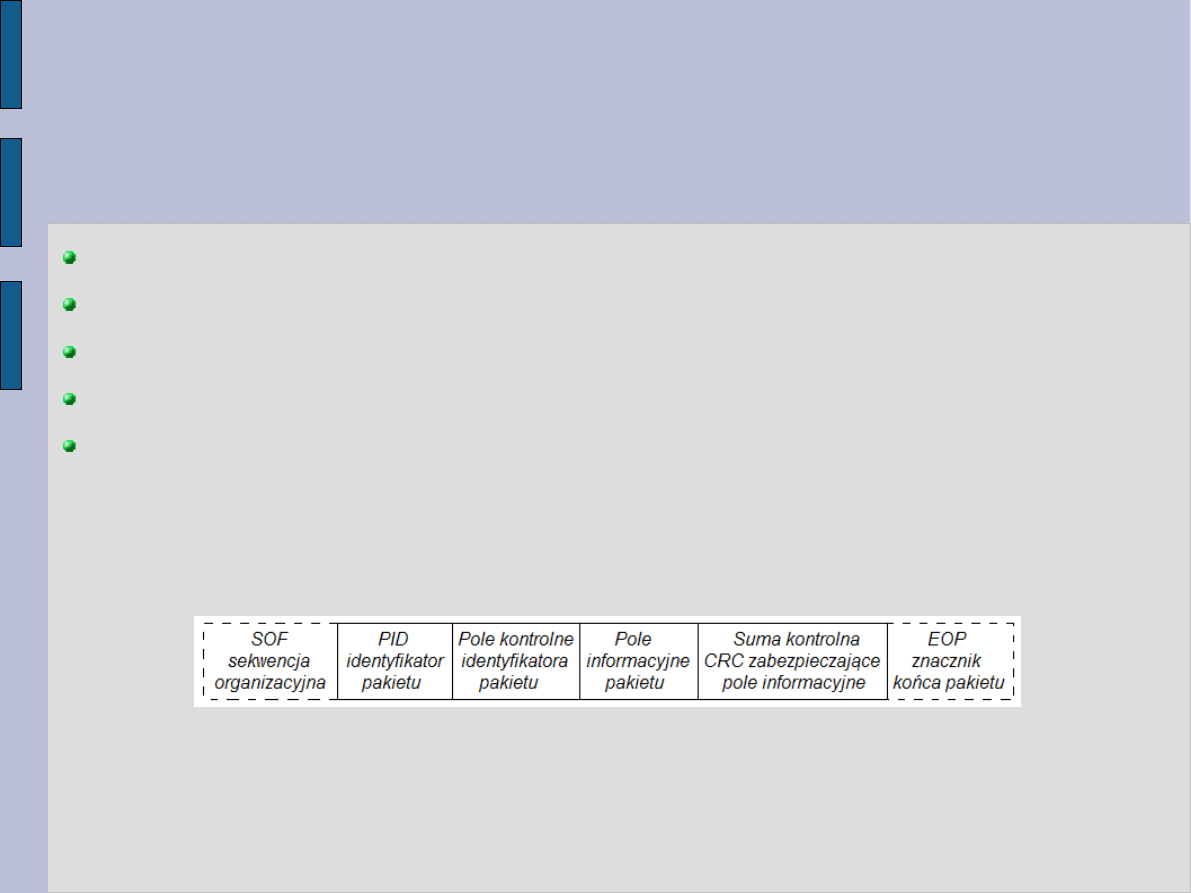
Pakiety:
Token
Data
Hendshake
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
USB
FireWire
Standardy FireWire:
100, 200, 400 Mb/s,
800 Mb/s – IEEE1394b (FireWire800 Apple) wersja 9 żyłowa
planowane 2 Gb/s
Standard IEEE1394b dzięki wykorzystaniu połączeń optycznych umożliwia
uzyskanie prędkości 3,2Gb/s
Łącze szeregowe do szybkiej komunikacji i wymiany dużej ilości danych w
czasie rzeczywistym. Norma IEEE-1394.`
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – Rodzaje, typy
2 WIRE
SPI
RS232
CAN
USB
FireWire
Inne PCI, SATA, ATA, porty równoległe
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
PWM, PAM, PPM, PCM
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
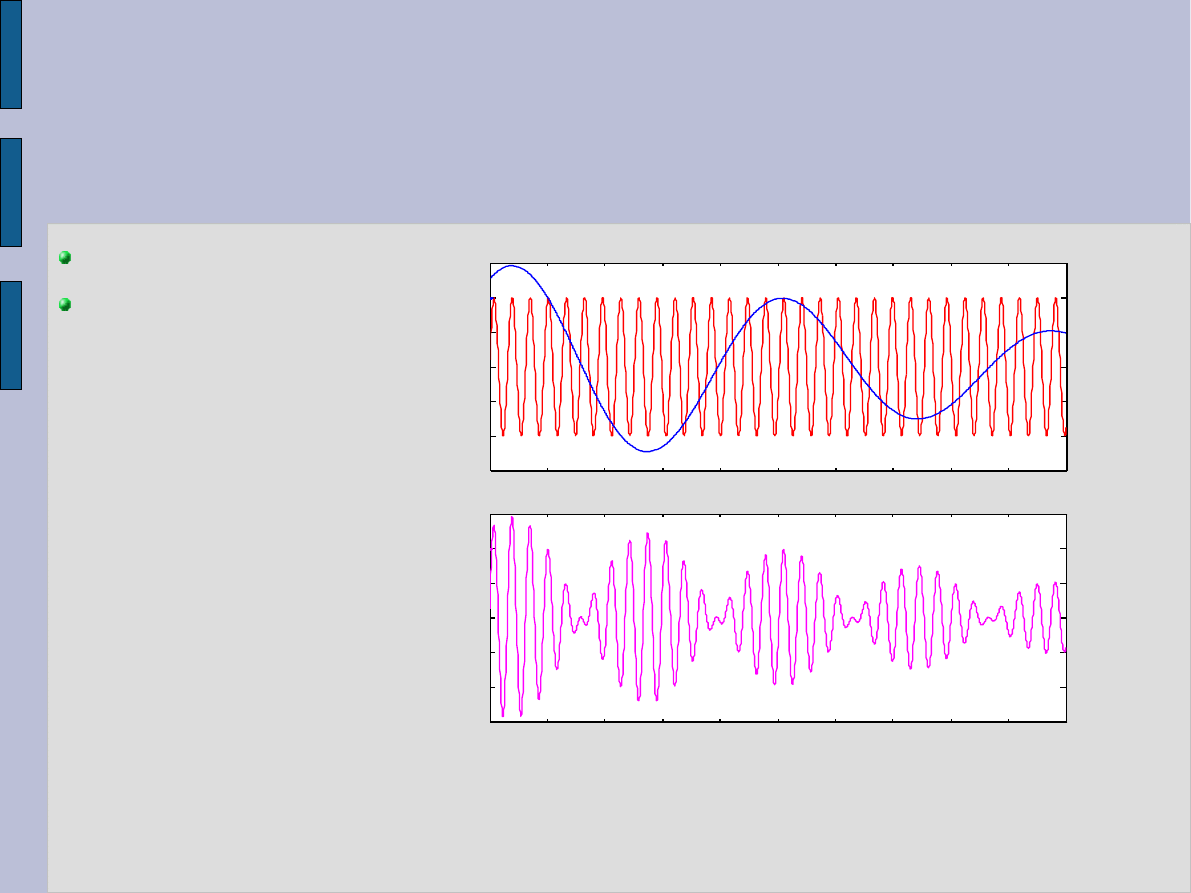
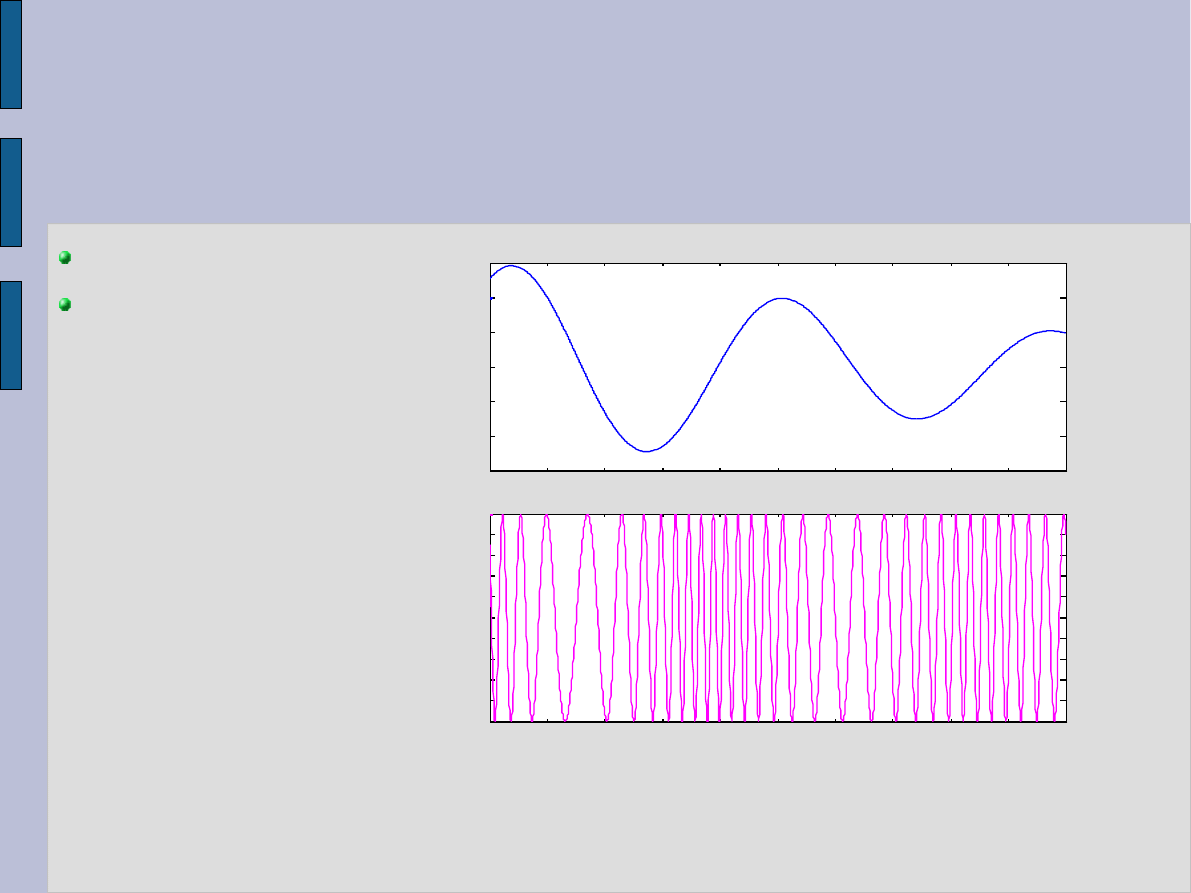
Modulacja sygnału
AM
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 4
- 3
- 2
- 1
0
1
2
3
4
Kodowanie
Modulacja sygnału
AM
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
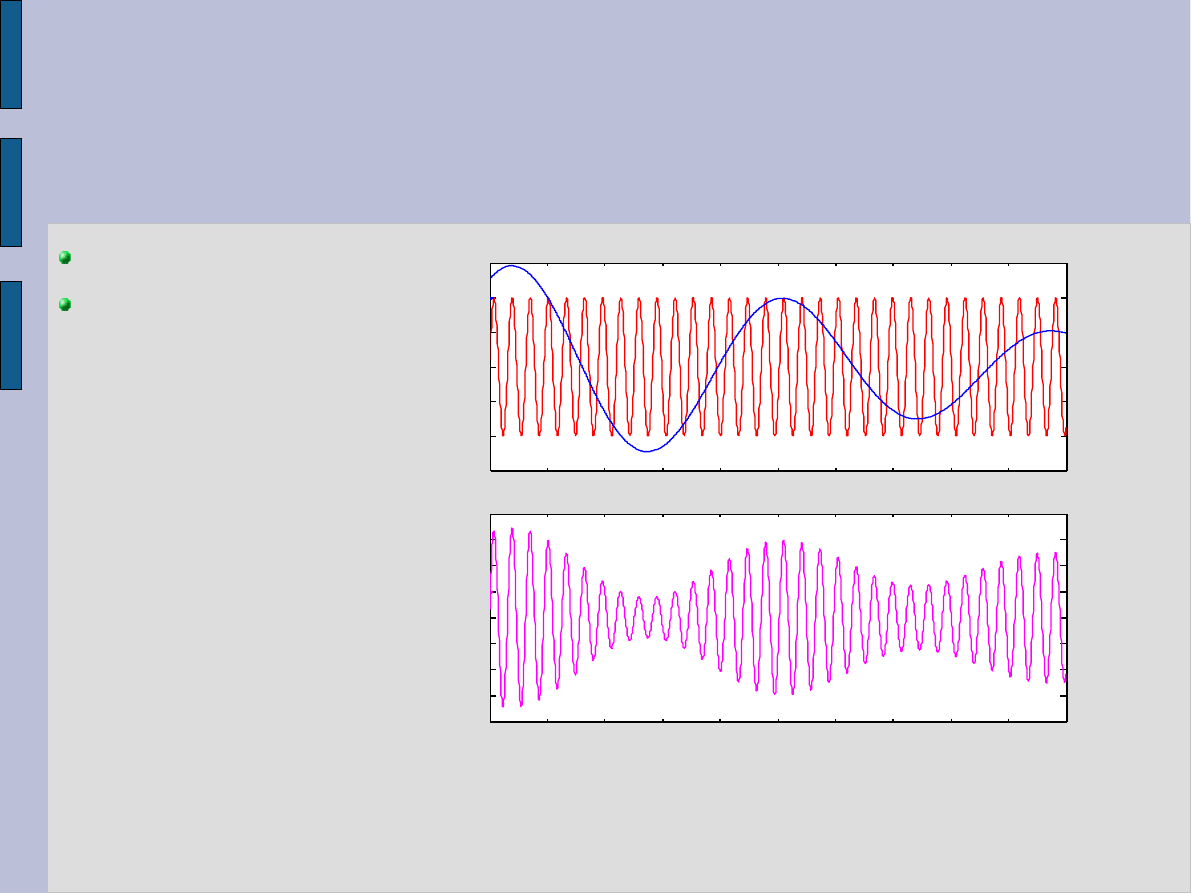
Modulacja sygnału
AM
AM-SC, DSB
SSB
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
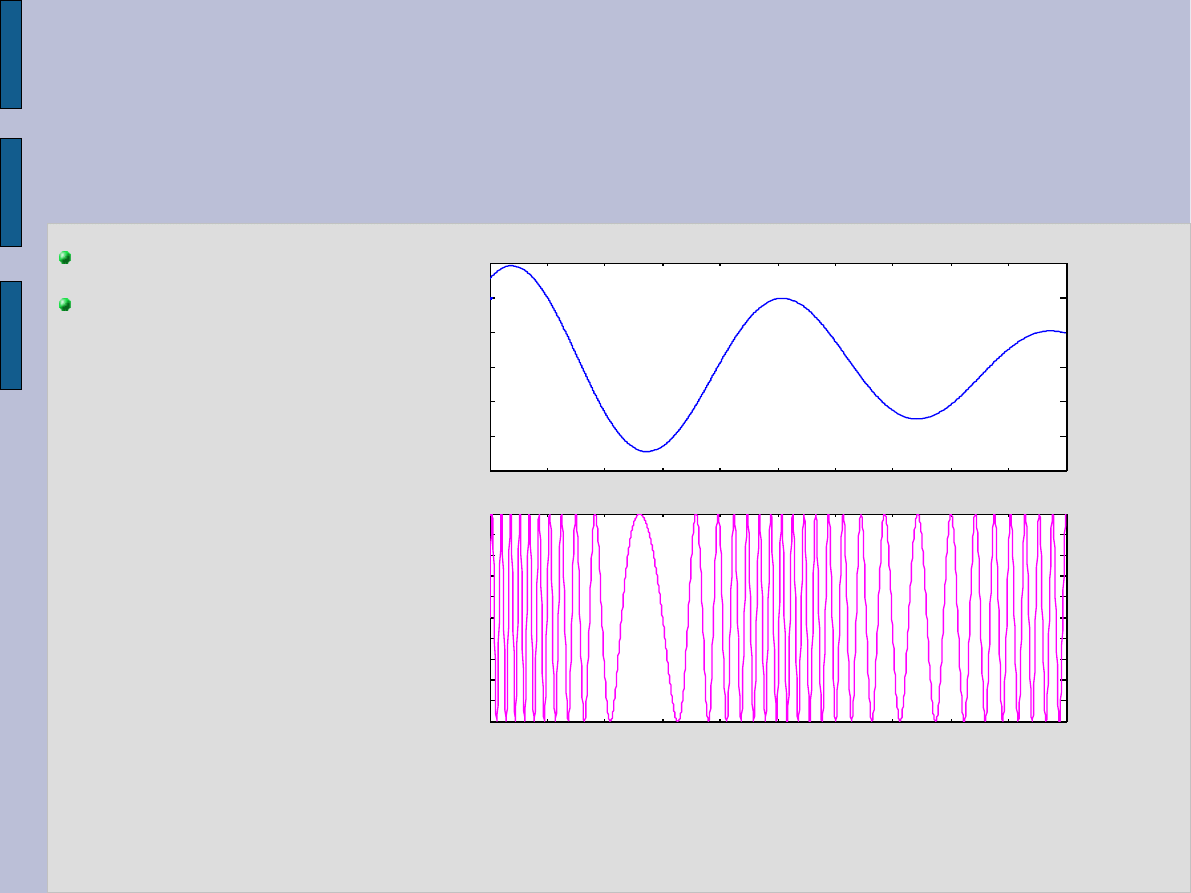
Kodowanie
Modulacja sygnału
FM
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1
- 0 . 8
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
1
0
2 0 0
4 0 0
6 0 0
8 0 0
1 0 0 0
1 2 0 0
1 4 0 0
1 6 0 0
1 8 0 0
2 0 0 0
- 1 . 5
- 1
- 0 . 5
0
0 . 5
1
1 . 5
Kodowanie
Modulacja sygnału
PM
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
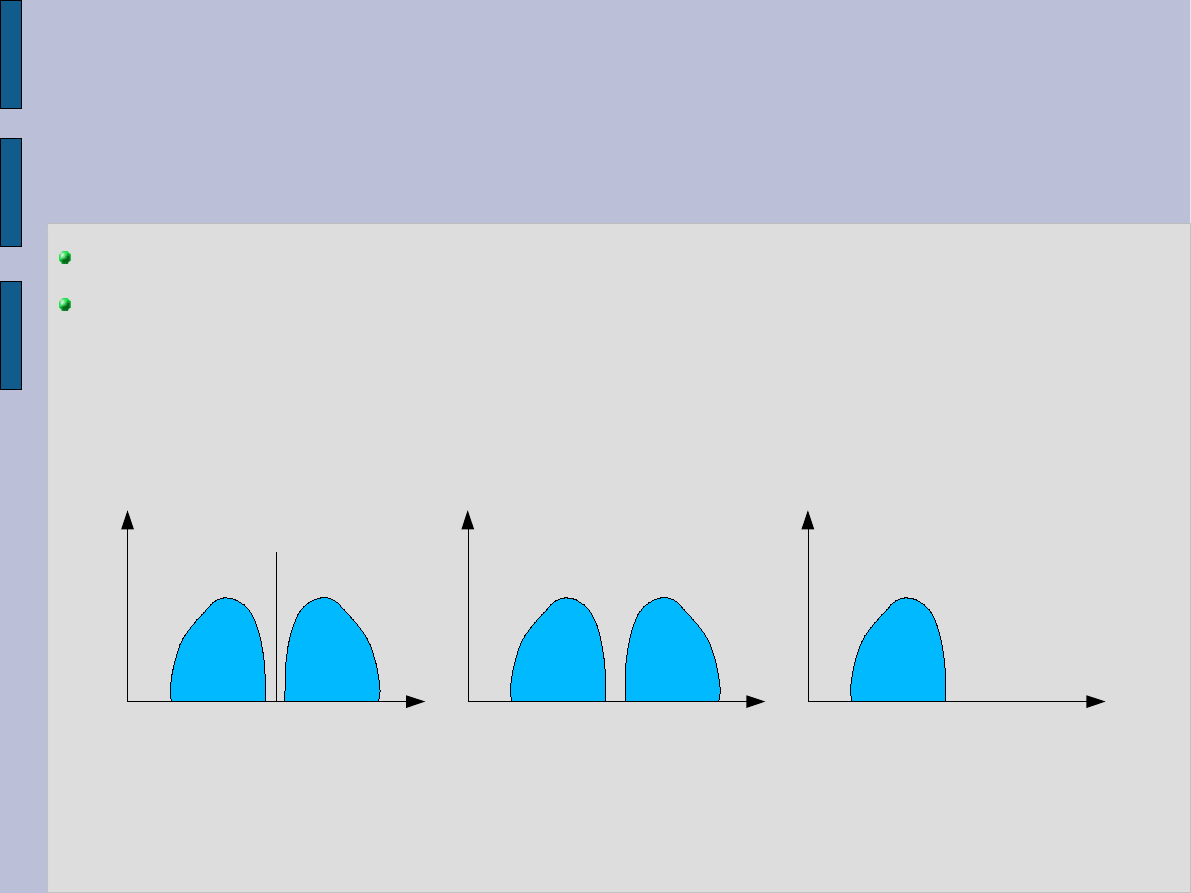
Kodowanie
Modulacja sygnału
Przesyłanie równoległe sygnałów za pośrednictwem jednego kanału
radiowego.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
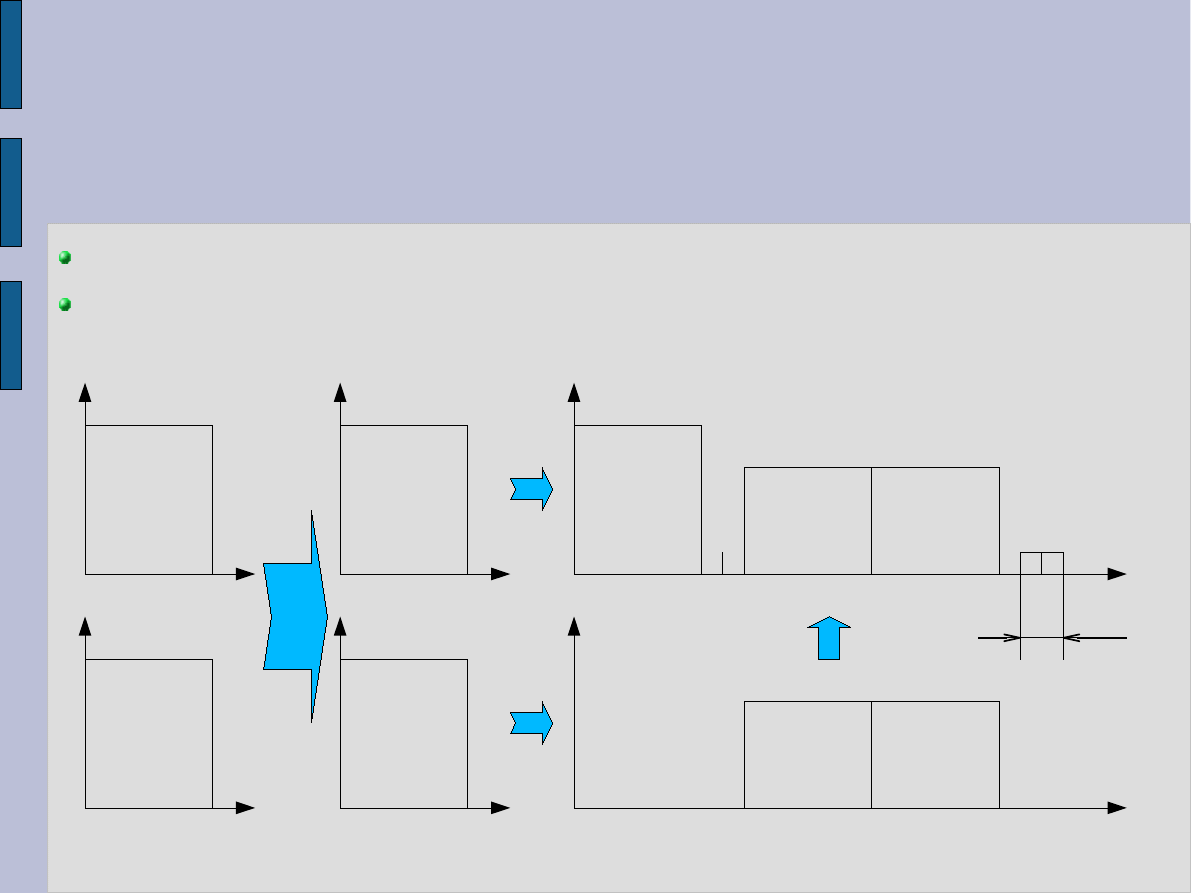
Fonia stereo:
15kHz
L
P
15kHz
L+P
L-P
38kHz
L-P
L-P
kHz
15 19 38 57
L+P
L-P
L-P
RDS
4,8k
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
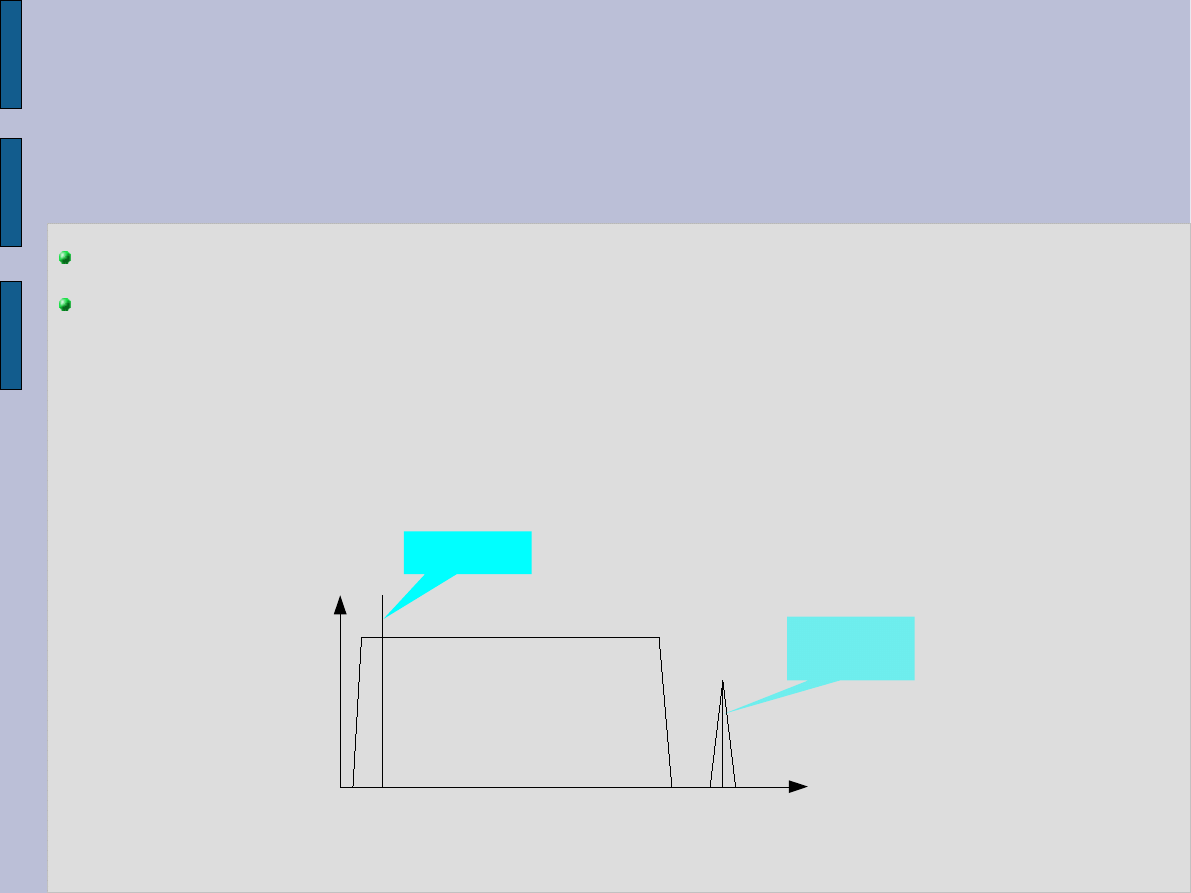
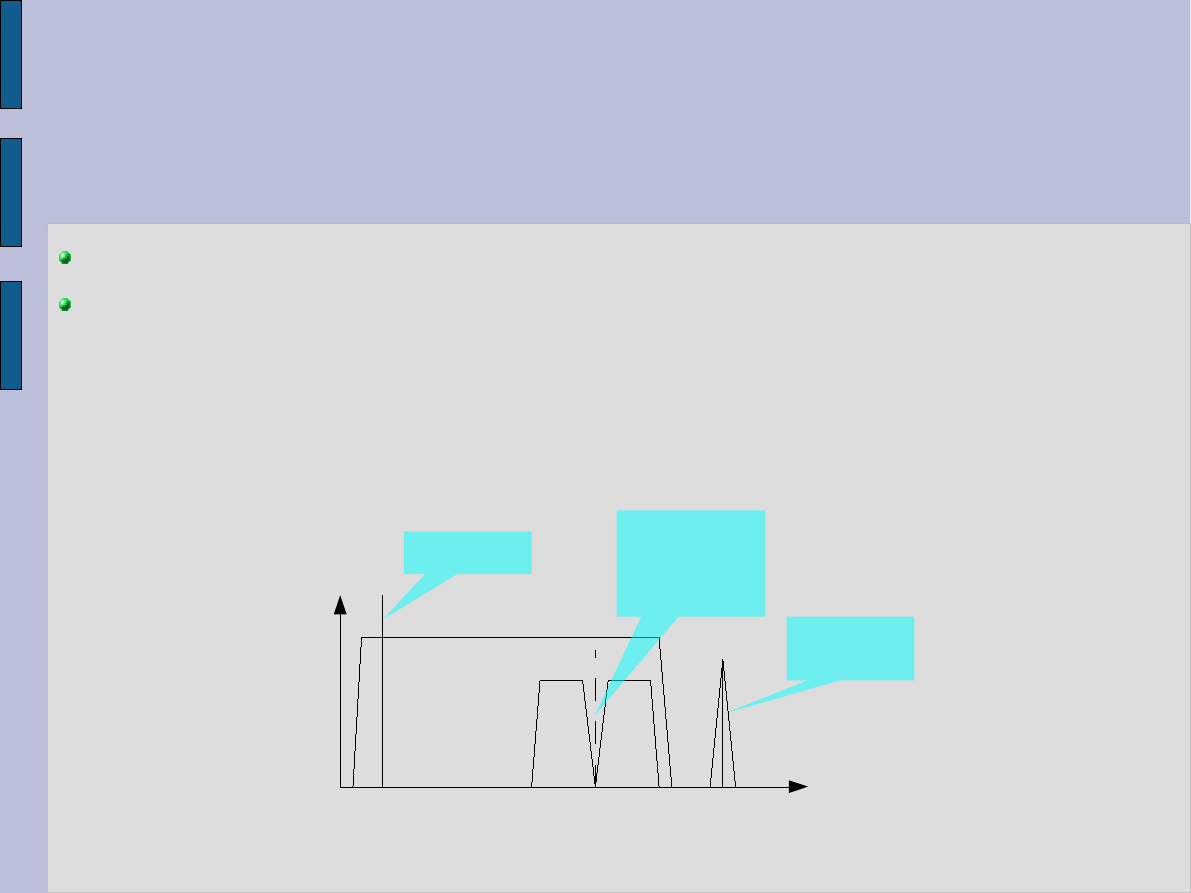
TV:
Czarnobiała: Luminancja i Fonia
Luminancja
Nośna
Podnośna
fonii
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
TV:
Kolorowa: Luminancja, Hrominancja i Fonia
Hrominancja: składowe U=0,493(B-Y), V=0,877(R-Y)
Luminancja
Nośna
Podnośna
fonii
Wytłumiona
podnośna
hrominancji
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
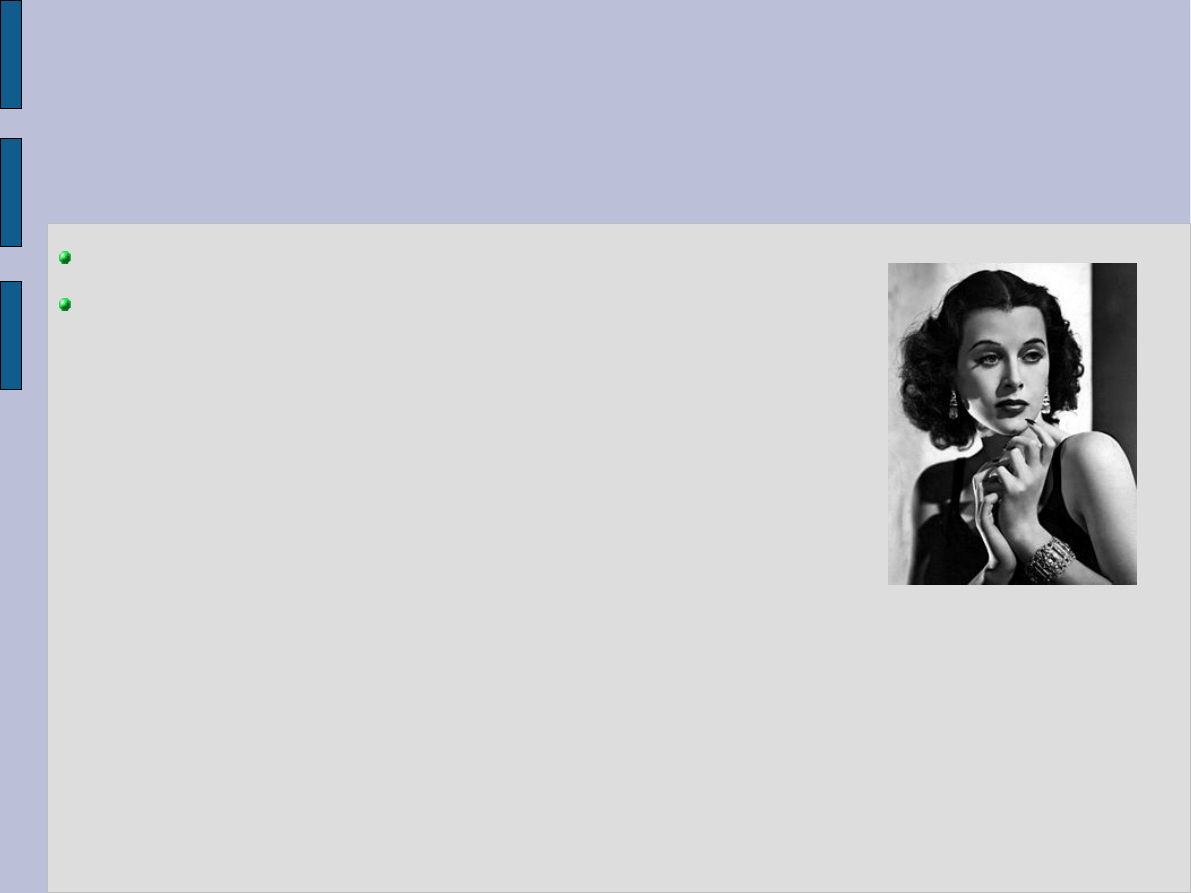
Hedy Lamarr – (1913–2000) aktorka i matematyk.
W 1941 roku wraz z muzykiem Georgem Antheil
opatentowała „Secret Communication System”
bazujący na technice przełączania częstotliwości
znanej dzisiaj jako rozszerzone widmo FDM.
System polegał na zmianie częstotliwości fali
nośnej zgodnie z wcześniej założonym schematem.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
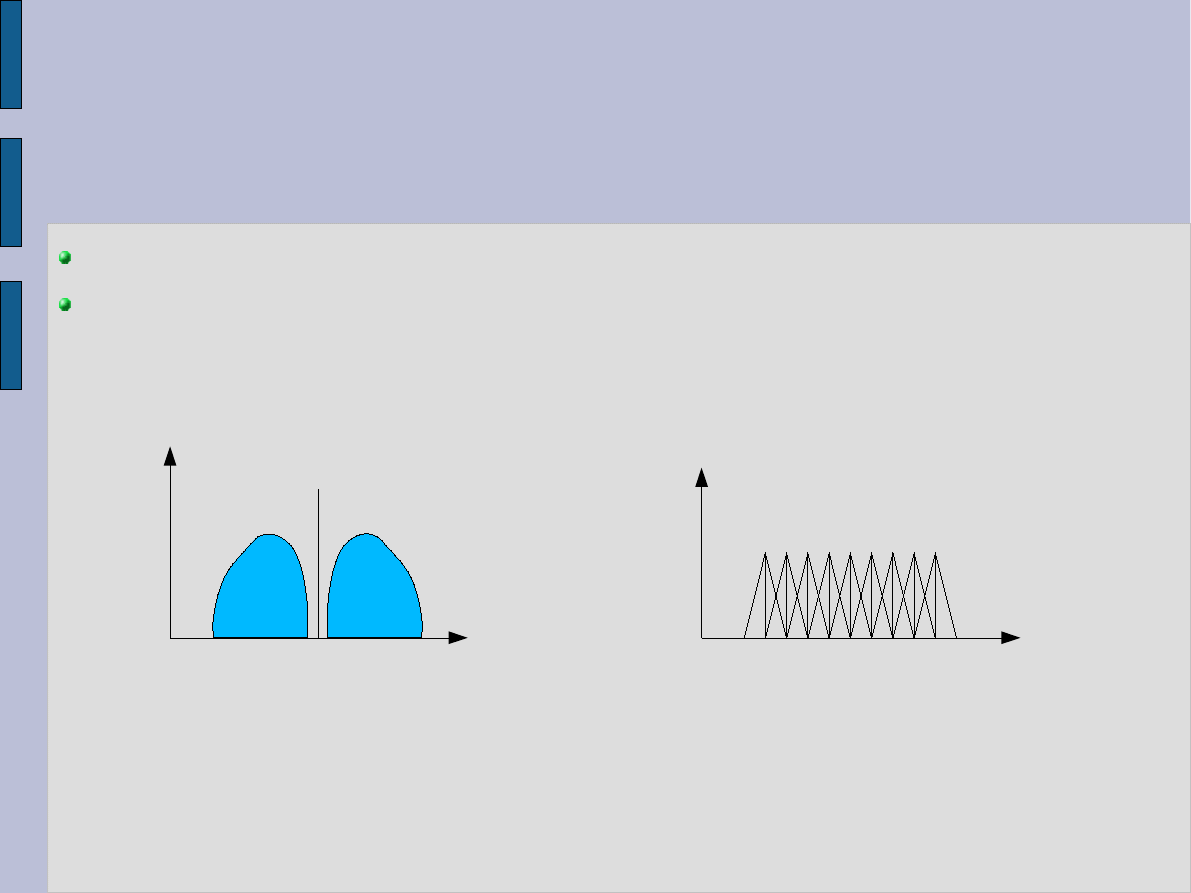
FDM (Frequency Division Multiplexing)
OFDM (Orthogonal FDM)
〈
s
N
1
, s
N
2
〉=
∫
0
T
s
s
n
1
(
t) s
n
2
(
t)dt=0,
T
s
−
czas trwania symbolu danych ,
s
n
(
t)=sin (n
ω
t ), n∈ℕ
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Kodowanie
Modulacja sygnału
FDM (Frequency Division Multiplexing)
OFDM (Orthogonal FDM)
DAB-OFDM (Digital Audio Broadcasting OFDM)
DVB-T OFDM(Digital Video Broadcasting – Terrestial OFDM)
ADSL-OFDM (Asymmetric Digital Subscriber Line OFDM)
WLAN-ODFM (Wireless Local Area Networks OFDM)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Dźwięk – komunikacja na poziomie ultradźwięków
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Parametr
Właściwości
Długość fali
850 – 900 nm
Typ połączenia
punkt-punkt
Liczba kanałów
Jeden – do transmisji danych
Prędkość transmisji
ob.: 9,6, opc.: 19,2, 38,4, 57,6, 115,2 kb/s
(IrDA 1.0 lub 1.1) oraz 0,576, 1,152, 4 Mb/s (1.1)
Zasięg i typ transmisji
do 1m, urz. muszą się „widzieć”, kąt wiązki 30°
Max ilość akt. urządzeń
2
Multipleksacja
przestrzenna
Dźwięk
Podczerwień – IrDA
IrDA ( ang. Infrared Data Association)
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
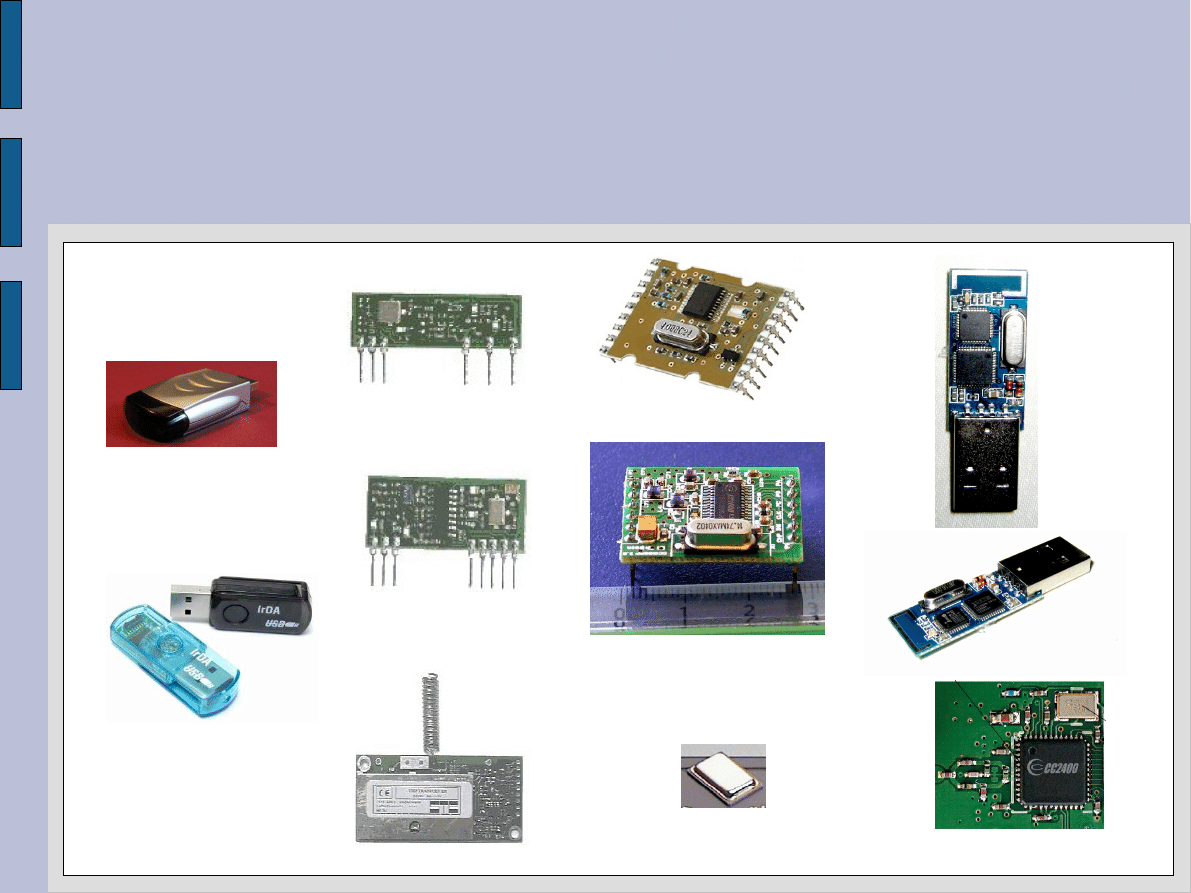
Dźwięk
Podczerwień
Komunikacja radiowa – za pośrednictwem fal radiowych
nadajniki i odbiorniki AM, FM, PM
transceivery
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Nie wszystkie częstotliwości są dostępne dla normalnego użytkownika.
Odpowiedni urząd zdefiniował zakresy wolnych częstotliwości:
26,995 – 27,255MHz
35,010 – 35,200MHz
35,820 – 35,910MHz
40,665 – 40,985MHz
41,000 – 41,200MHz
72,080 – 72,400MHz
315MHz, 433MHz, 868MHz, 915MHz,
2,4GHz, 5GHz
Dźwięk
Podczerwień
Komunikacja radiowa – za pośrednictwem fal radiowych
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Dźwięk
Podczerwień
Komunikacja radiowa
Inne
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja bezprzewodowa
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
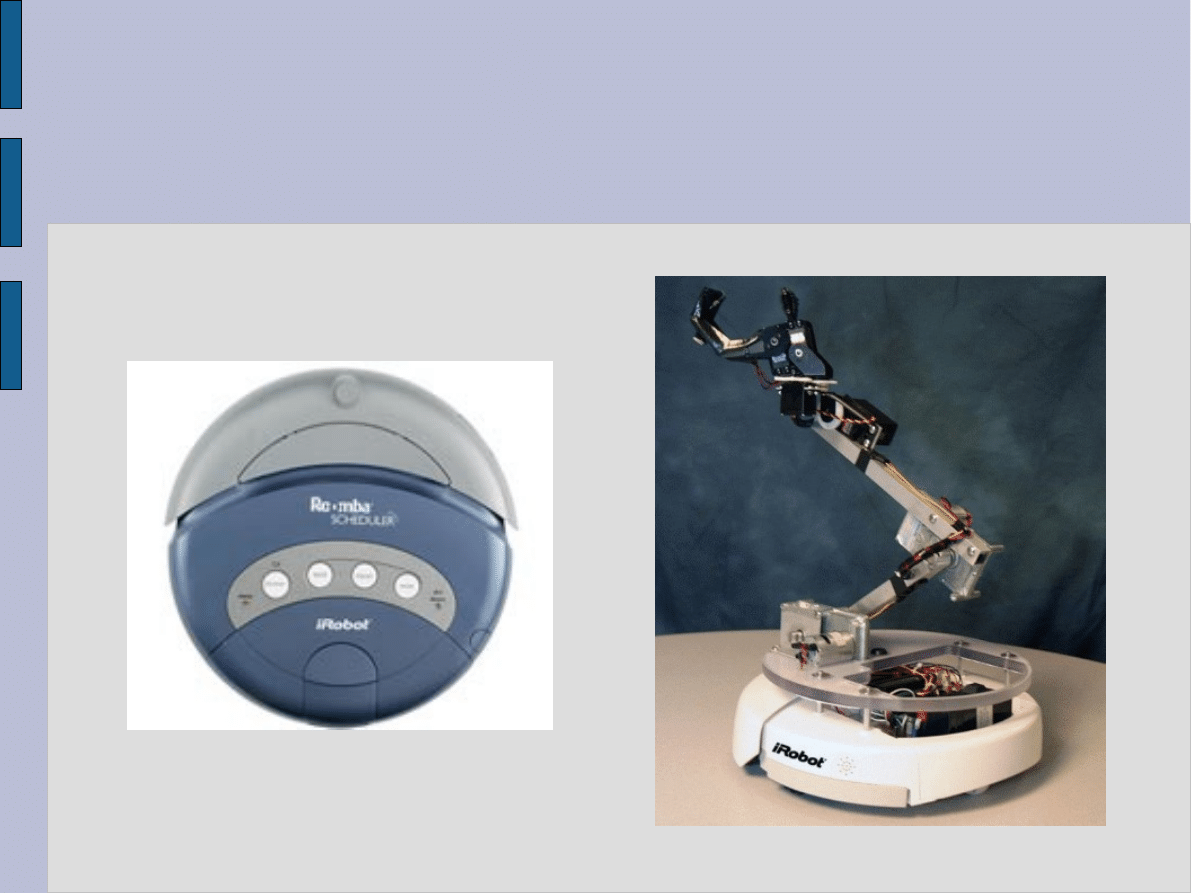
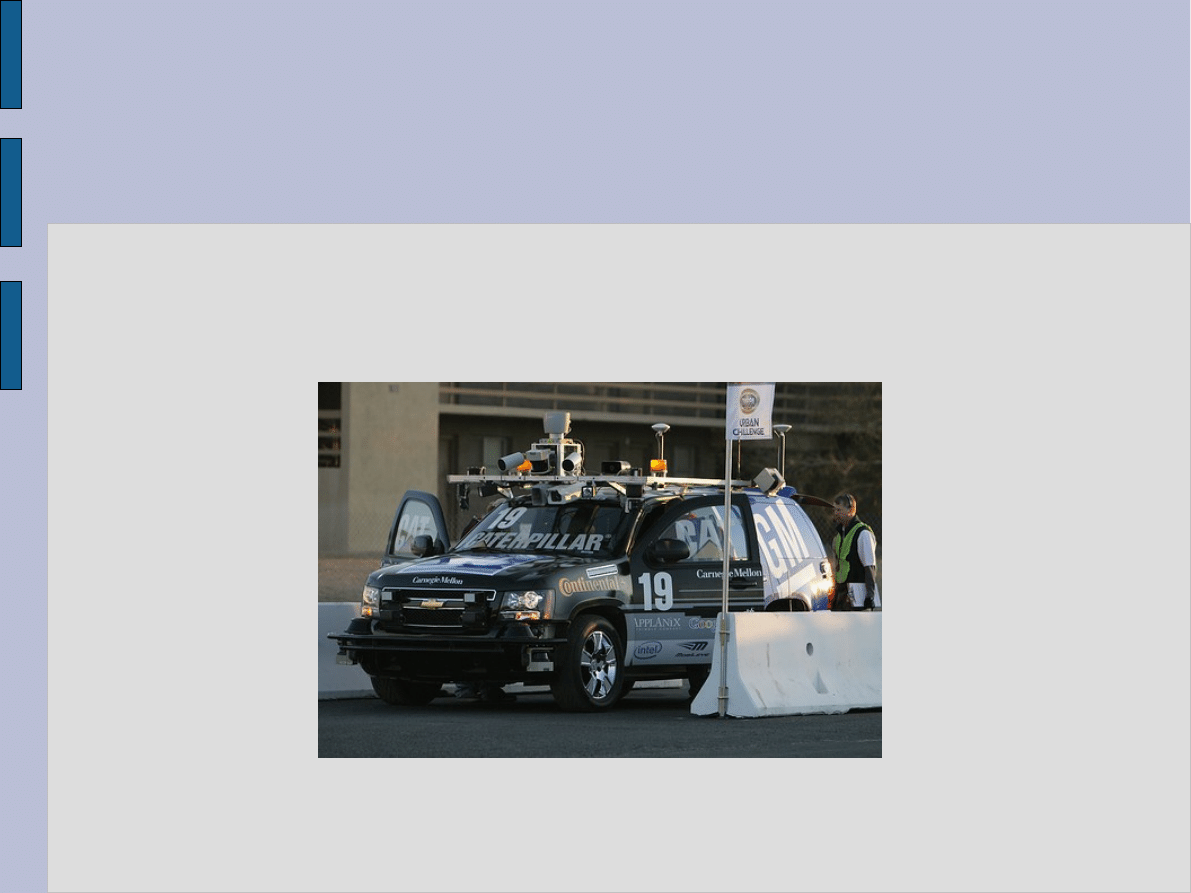
Microsoft Robotics Studio to narzędzie
programistyczne systemu Windows, pozwalające
na tworzenie oprogramowania dla robotów.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
DARPA Urban Challenge
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
Representational State Transfer
organizacja aplikacji rozproszonych poprzez
reprezentację ich stanu oraz definicję określonego
zestawu usług oferowanych w danym stanie.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
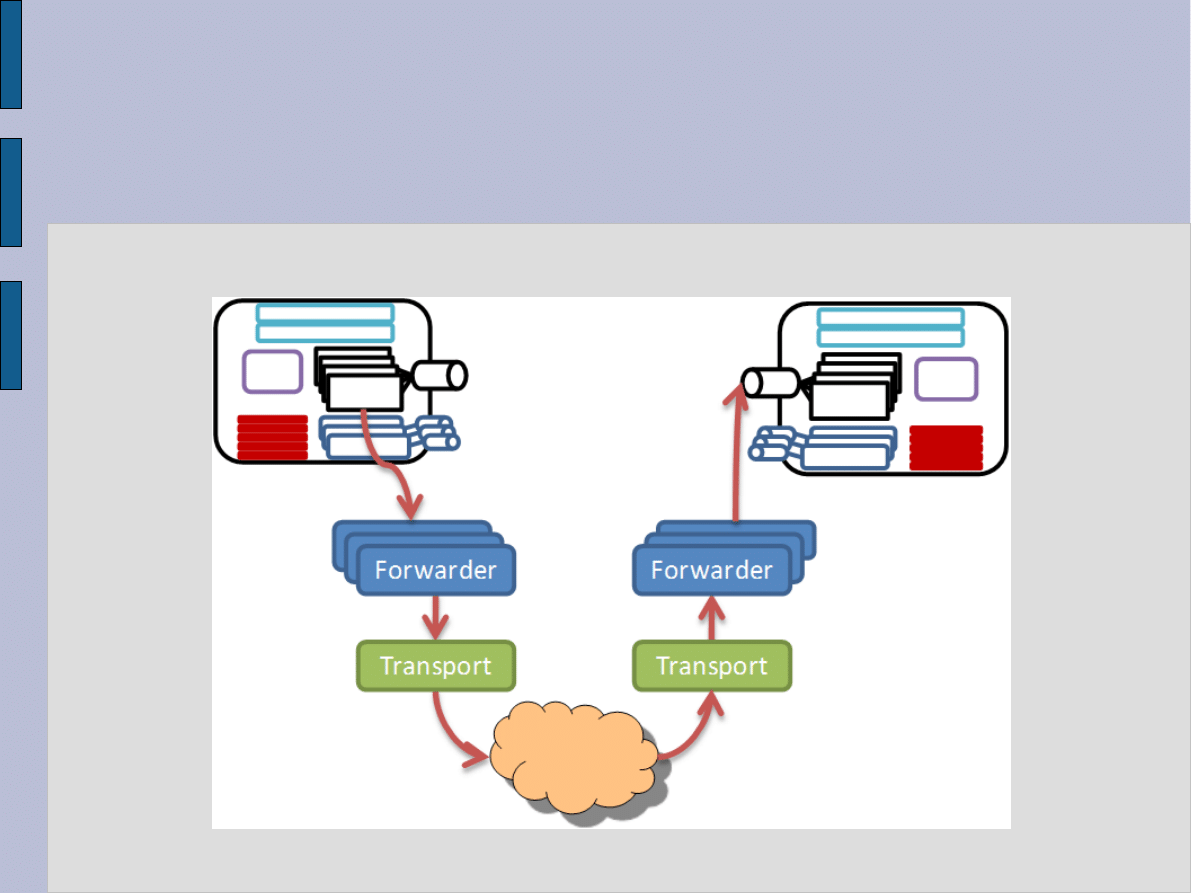
Decentralized Software Service
jest to zorientowany na usługi model łączący kluczowe aspekty
architektury sieciowej i usług sieciowych. Serwis definiowany jest
poprzez określony zestaw operacji, jakie można wykonać na stanie
tego serwisu. Pozwala na tworzenie aplikacji jako zestawy usług
znajdujących się na tym samym hoście.
HTTP
to warstwa wymiany komunikatów.
DSSP
protokół używany do subskrypcji i manipulowania usługami
.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
Cuncurency and Coordination Runtime
Biblioteka elementów pozwalających na prostą implementację
aplikacji dla scenariuszy wymagających multitaskingu i operacji
asynchronicznych (WCF).
●
Klasy to elementy CCR udostępniające użytkownikowi
możliwość tworzenia prostych modeli obiektowych
pozwalających na pełną obsługę operacji I/O.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
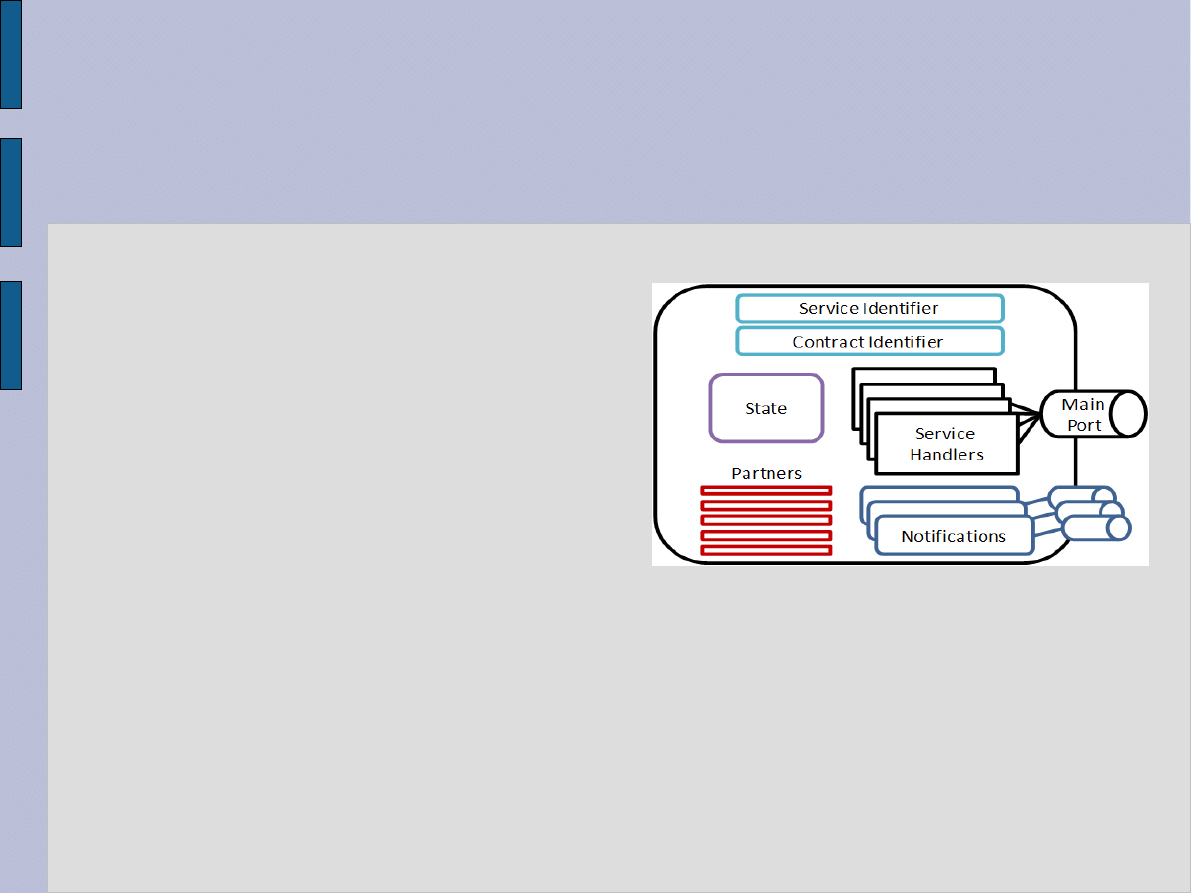
Komunikacja – MSRS
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
State – stan usługi, opisuje aktualną
wartość zmiennych.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
State – stan usługi, opisuje aktualną
wartość zmiennych.
●
Partners – usługi współpracujące
z danym serwisem.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
State – stan usługi, opisuje aktualną
wartość zmiennych.
●
Partners – usługi współpracujące
z danym serwisem.
●
Service handlers – uchwyty pozwalające na obsłużenie wiadomości
przychodzącej na port.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
State – stan usługi, opisuje aktualną
wartość zmiennych.
●
Partners – usługi współpracujące
z danym serwisem.
●
Service handlers – uchwyty pozwalające na obsłużenie wiadomości
przychodzącej na port.
●
Main Port – port na który przychodzą wiadomości z innych serwisów.
●
Service Identifier – URI przypisane
dynamicznie konkrentnej instancji
usługi przez DSS Node.
●
Contract Identifier – URI identyfi-
kujące kontrakt usługi.
●
State – stan usługi, opisuje aktualną
wartość zmiennych.
●
Partners – usługi współpracujące
z danym serwisem.
●
Service handlers – uchwyty pozwalające na obsłużenie wiadomości
przychodzącej na port.
●
Main Port – port na który przychodzą wiadomości z innych serwisów.
●
Notification – zdarzenie powiadamiające o zmianie stanu usługi.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Komunikacja – MSRS
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
- Slajd 21
- Slajd 22
- Slajd 23
- Slajd 24
- Slajd 25
- Slajd 26
- Slajd 27
- Slajd 28
- Slajd 29
- Slajd 30
- Slajd 31
- Slajd 32
- Slajd 33
- Slajd 34
- Slajd 35
- Slajd 36
- Slajd 37
- Slajd 38
- Slajd 39
- Slajd 40
- Slajd 41
- Slajd 42
Wyszukiwarka
Podobne podstrony:
WDRM 6 2013
WDRM 4 2013
wykłady NA TRD (7) 2013 F cz`
Pr UE Zródła prawa (IV 2013)
W WO 2013 technologia
TEORIE 6 2013 R
Wyk ECiUL#1 2013
Leczenie wrzodziejacego zapalenia jelit, wyklad 2013
TEORIE 1 2013 IIR
Wyk ECiUL#9S 2013
Estrogeny 2013
Problemy zrownowazonego rozwoju UKG 2013
wykład 15 bezrobocie 2013
Temat6+modyf 16 05 2013
Antropologialiteracka2012 2013
2013 MYSLENIE inteligencja
więcej podobnych podstron