Wprowadzenie do robotyki
mobilnej
Sterowniki
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Układ sterujący pracą maszyny to
urządzenie które na podstawie sygnału
sterującego wypracowuje sygnał wyjściowy
do obiektu regulacji.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Roboty pierwszej generacji
Robot
Sterownik
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Roboty drugiej generacji
Robot
Sterownik
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Roboty trzeciej generacji
Robot
Sterownik
Pomiary złożone
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
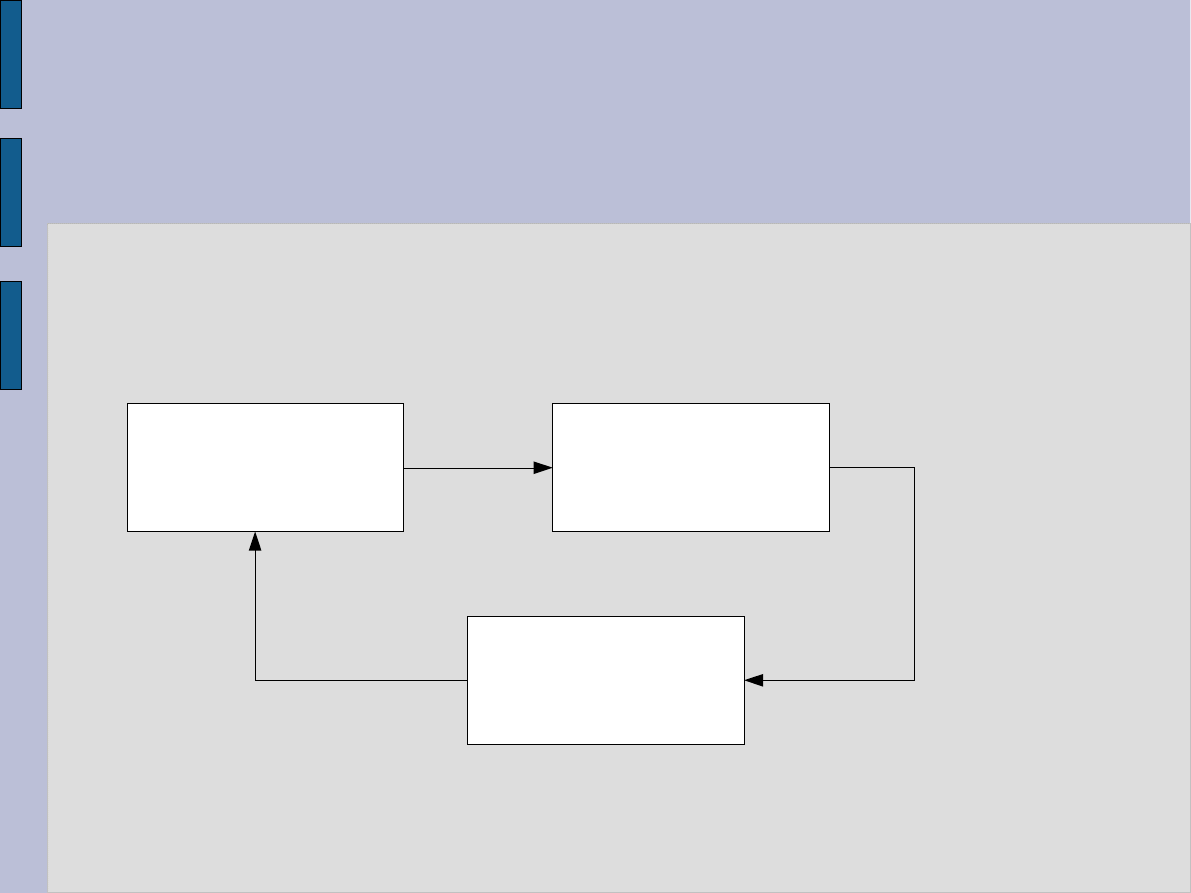
Maszyna
Mikrokontroler
Maszyna
Mikrokontroler
Komputer
Maszyna
Mikrokontroler
Maszyna
Mikrokontroler
Maszyna
Mikrokontroler
Komputer
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
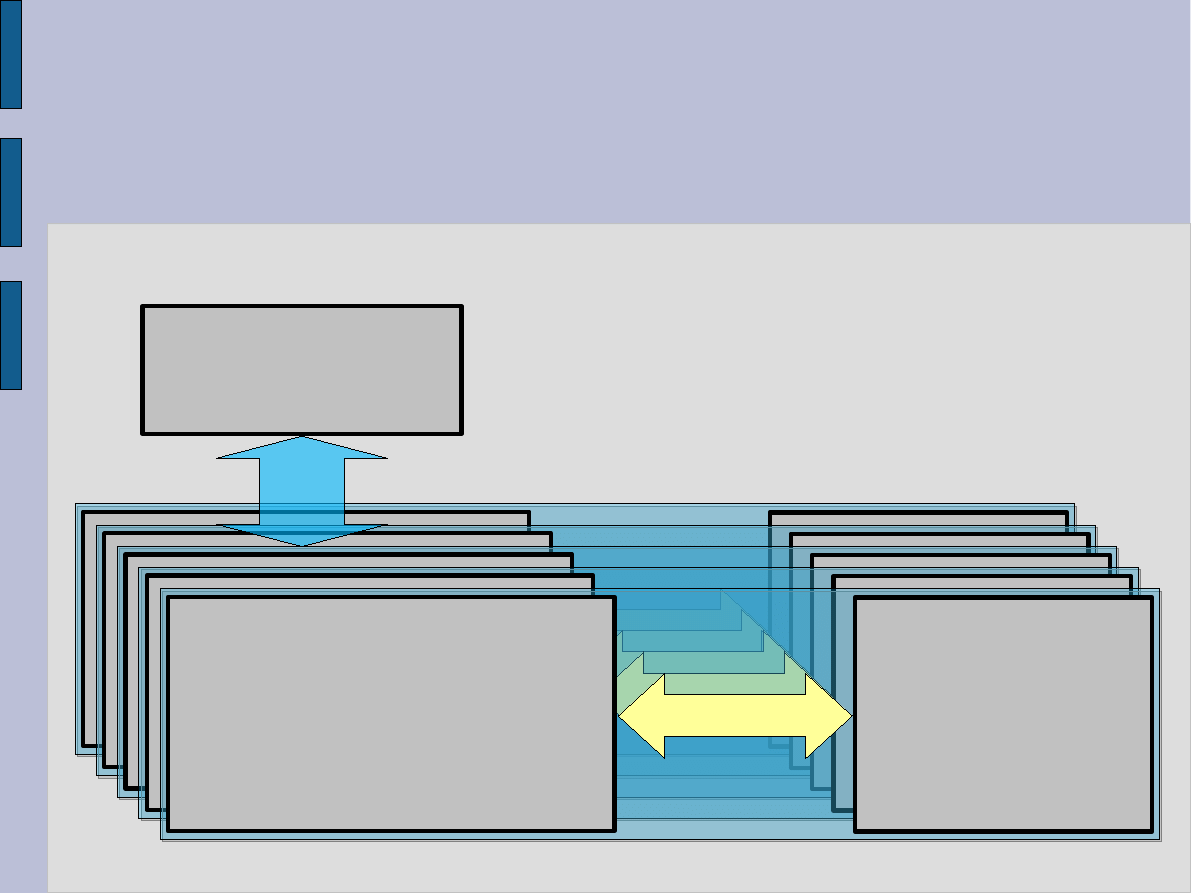
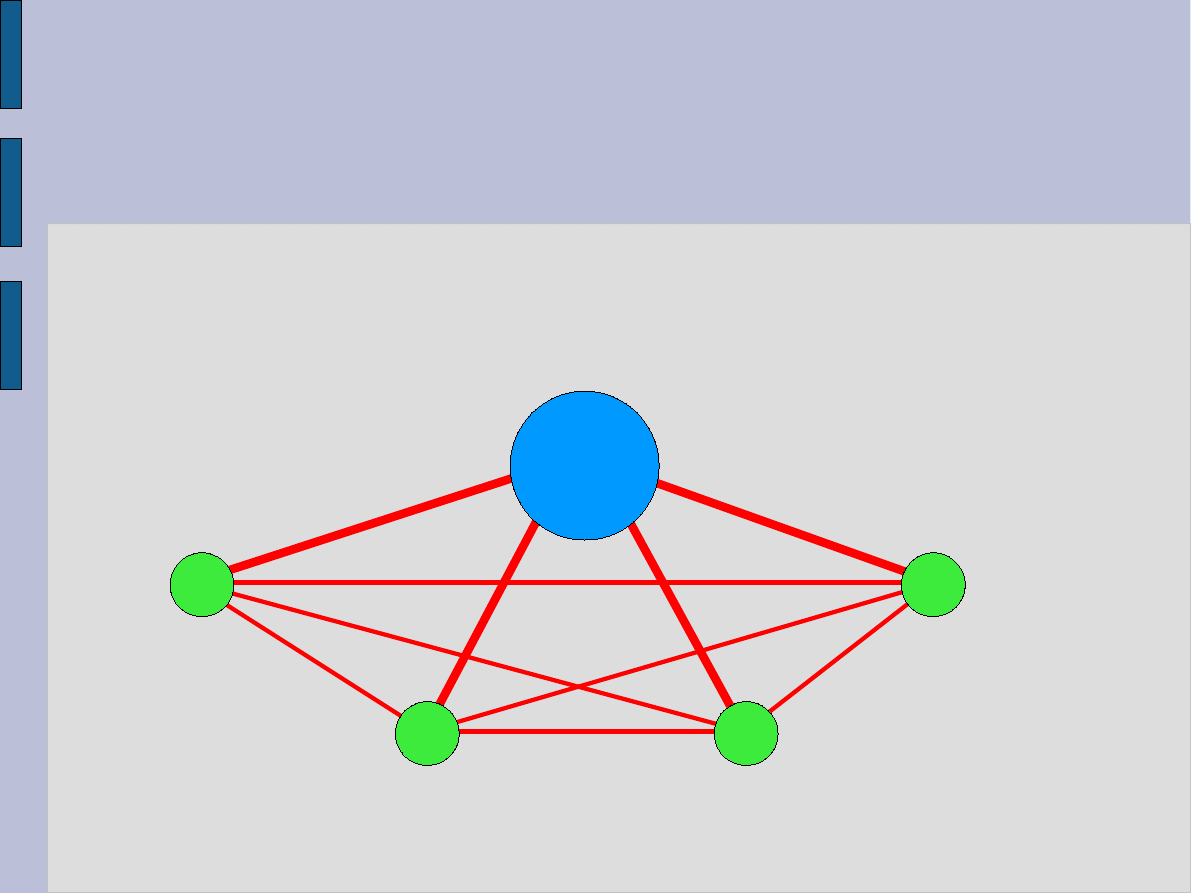
STEROWANIE SCENTRALIZOWANE - jedna maszyna podejmująca
decyzje oraz zarządzająca pracą pozostałych jednostek w zespole.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
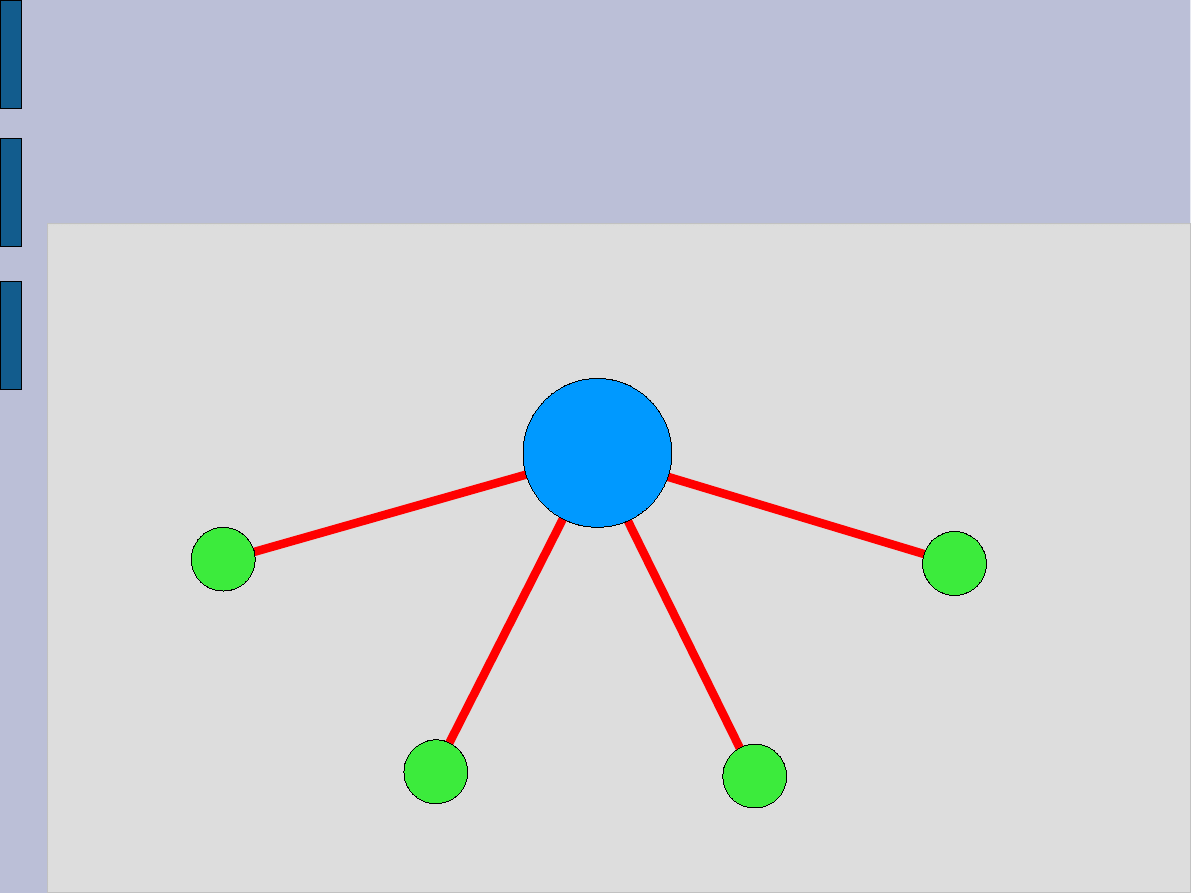
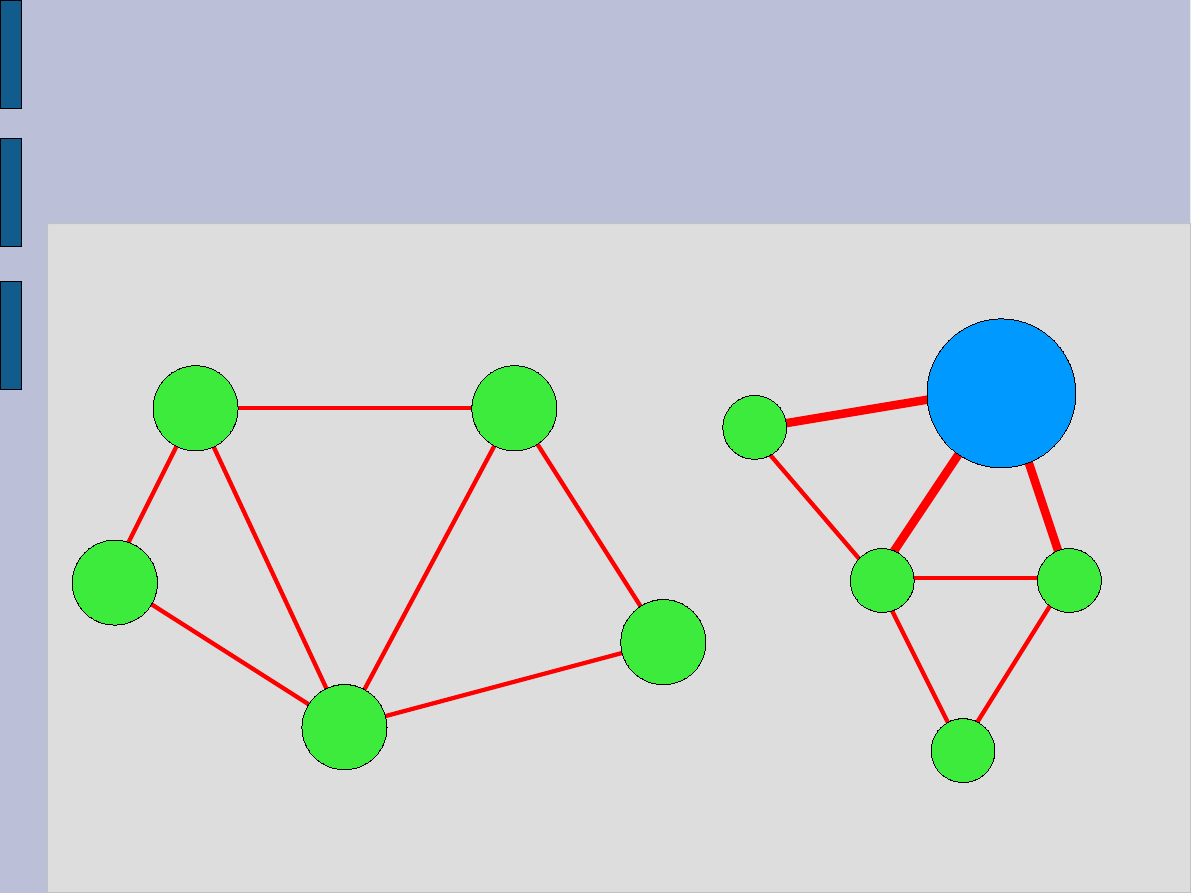
STEROWANIE ROZPROSZONE – każda jednostka jest autonomiczna
i współpracuje z innymi jednostkami.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
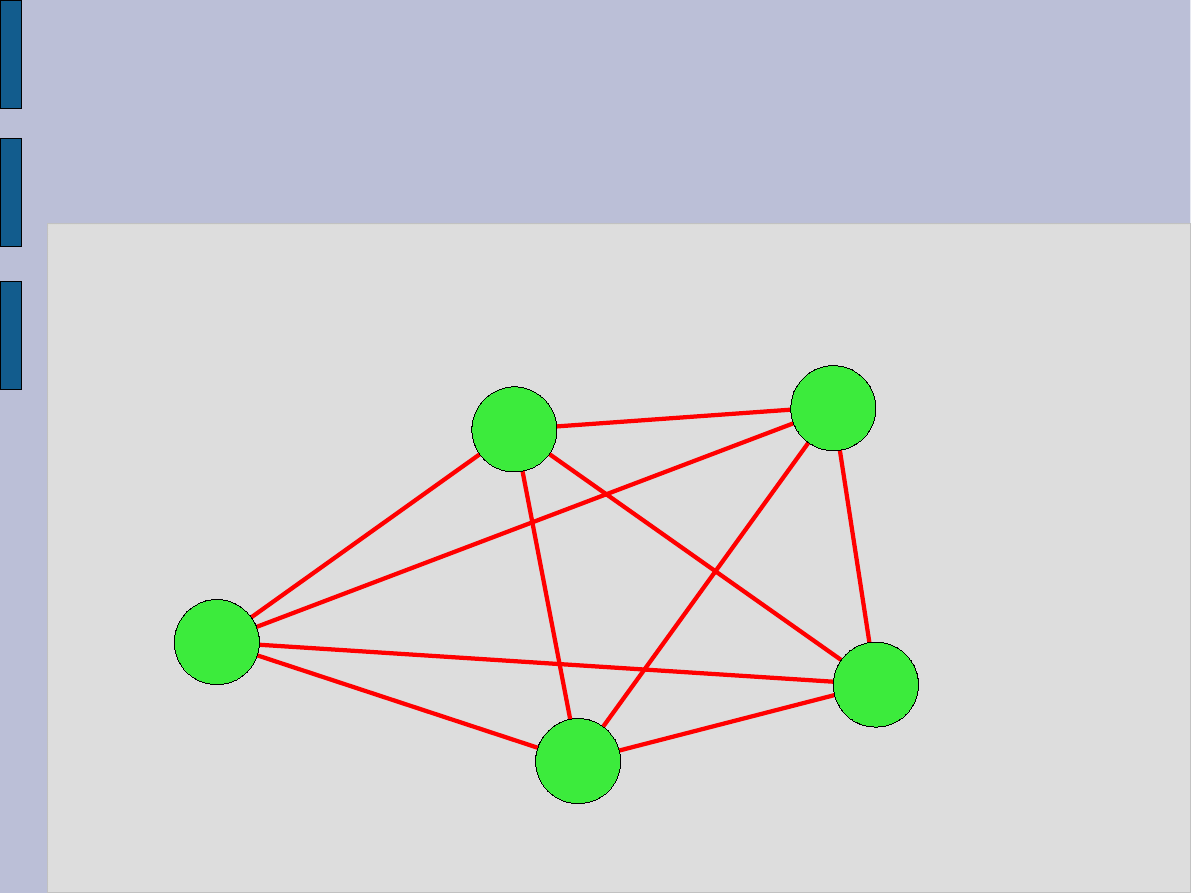
STEROWANIE HYBRYDOWE – połączenie sterowania rozproszonego i
scentralizowanego.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Ograniczona komunikacja.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki
Układy
peryferyjne
MK uC
Maszyna
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
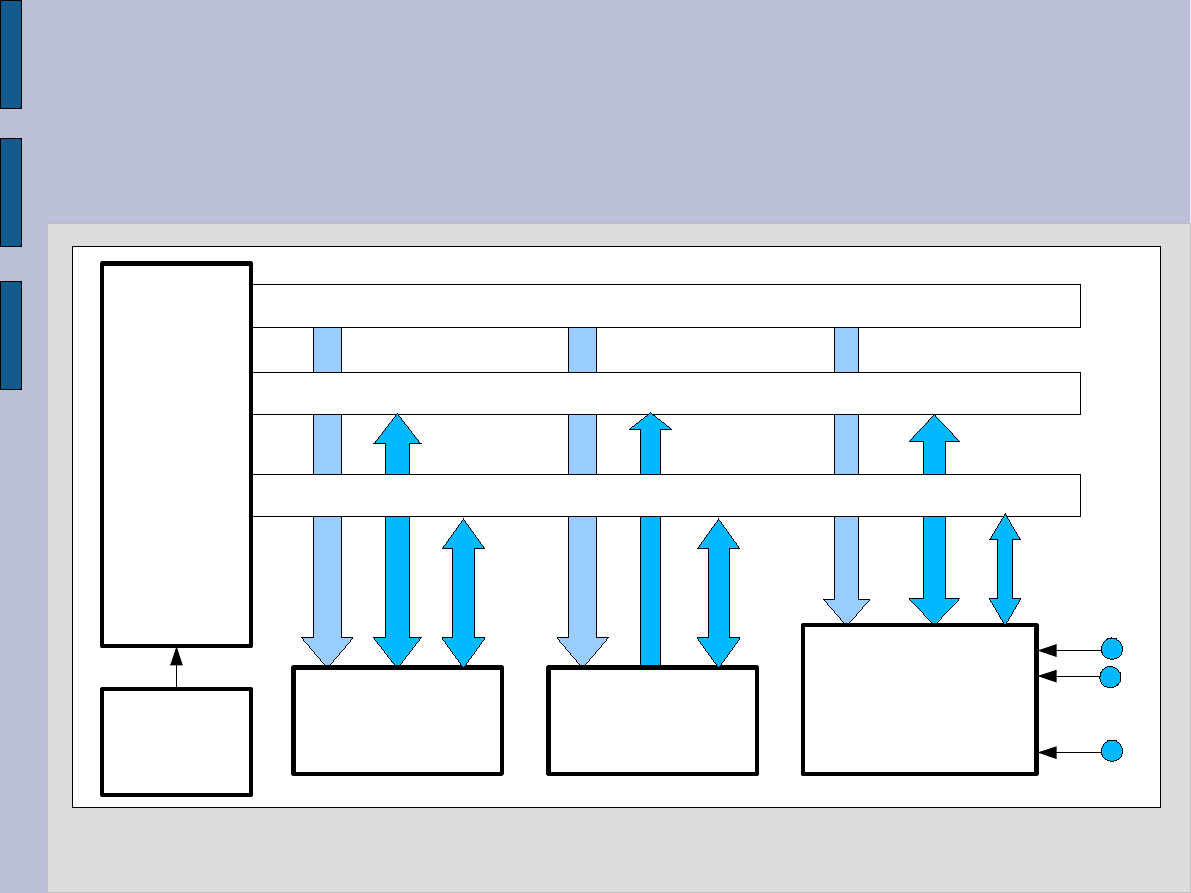
Sterowniki – Mikrokontrolery
Mikrokontroler to sekwencyjno – logiczny układ cyfrowy
z mikroprocesorem oraz urządzeniami niezbędnymi do jego
pracy zawartymi w jednej obudowie i czyniącymi układ
autonomicznym.
Cechy mikrokontrolerów:
●
Jest zdolny do autonomicznej pracy
●
Zostały zaprojektowane do pracy w systemach kontrolno-
pomiarowych oraz komunikacyjnych
●
Z reguły pracują w czasie rzeczywistym
Mikrokontroler to sekwencyjno – logiczny układ cyfrowy
z mikroprocesorem oraz urządzeniami niezbędnymi do jego
pracy zawartymi w jednej obudowie i czyniącymi układ
autonomicznym.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Szyna adresowa
Szyna danych
Szyna sterująca
Pamięć
danych
Urządzenia
peryferyjne
Pamięć
programu
Zegar
Jednostka
centralna
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Jednostka centralna (procesor, procesor rdzeniowy) to układ cyfrowy
należący do grupy układów sekwencyjno – logicznych i synchronicznych.
Parametry jednostki centralnej:
●
Szerokość szyny danych
●
Prędkość sygnału taktującego
Jednostka centralna (procesor, procesor rdzeniowy) to układ cyfrowy
należący do grupy układów sekwencyjno – logicznych i synchronicznych.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Pamięć programu jest to pamięć w której przechowywany jest kod
maszynowy stanowiący sekwencję poleceń wykonywanych przez
jednostkę centralną układu.
Parametry pamięci programu:
●
Typ pamięci
●
Wielkość
●
Rodzaj pamięci
Pamięć programu jest to pamięć w której przechowywany jest kod
maszynowy stanowiący sekwencję poleceń wykonywanych przez
jednostkę centralną układu.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Pamięć danych jest to pamięć w której przechowywany są informacje
i dane przetwarzane przez jednostkę centralną.
Parametry pamięci danych:
●
Typ pamięci
●
Wielkość
●
Rodzaj pamięci
Pamięć danych jest to pamięć w której przechowywany są informacje
i dane przetwarzane przez jednostkę centralną.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Układy peryferyjne to urządzenia, układy
zewnętrzne współpracujące z jednostką centralną.
Rozszerzają one funkcjonalność mikrokontrolera
oraz decydują o jego możliwościach i zakresie
zastosowań.
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Układy nadzorujące
Przetworniki CA i AC
Komparatory
Watchdog
LVD
Timers/Counters
PWM
Captures
UART
1WIRE, 2WIRE
SPI
I2C
CAN
USB
Porty
PCIAMCIA
Slave port
Układy nadzorujące
Układy czasowe
Komunikacja szeregowa
Komunikacja równoległa
Układy specjalizowane
Układy nadzorujące
Układy czasowe
Układy nadzorujące
Układy czasowe
Komunikacja szeregowa
Układy nadzorujące
Układy czasowe
Komunikacja szeregowa
Komunikacja równoległa
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Parametry mikrokontrolera:
●
Szerokość szyny danych
●
Prędkość sygnału taktującego
●
Architektura
●
Pamięci (rodzaje, typy, rozmiary)
●
Urządzenia peryferyjne
●
Zaimplementowane instrukcje
●
Przerwania
Parametry mikrokontrolera:
●
Szerokość szyny danych
●
Prędkość sygnału taktującego
●
Architektura
●
Pamięci (rodzaje, typy, rozmiary)
●
Urządzenia peryferyjne
Parametry mikrokontrolera:
●
Szerokość szyny danych
●
Prędkość sygnału taktującego
●
Architektura
Wprowadzenie do robotyki mobilnej
Budowa maszyn mobilnych
Sterowniki – Mikrokontrolery
Przykład mikrokontrolera
Document Outline
- Slajd 1
- Slajd 2
- Slajd 3
- Slajd 4
- Slajd 5
- Slajd 6
- Slajd 7
- Slajd 8
- Slajd 9
- Slajd 10
- Slajd 11
- Slajd 12
- Slajd 13
- Slajd 14
- Slajd 15
- Slajd 16
- Slajd 17
- Slajd 18
- Slajd 19
- Slajd 20
Wyszukiwarka
Podobne podstrony:
WDRM 4 2013
WDRM 5 2013
wykłady NA TRD (7) 2013 F cz`
Pr UE Zródła prawa (IV 2013)
W WO 2013 technologia
TEORIE 6 2013 R
Wyk ECiUL#1 2013
Leczenie wrzodziejacego zapalenia jelit, wyklad 2013
TEORIE 1 2013 IIR
Wyk ECiUL#9S 2013
Estrogeny 2013
Problemy zrownowazonego rozwoju UKG 2013
wykład 15 bezrobocie 2013
Temat6+modyf 16 05 2013
Antropologialiteracka2012 2013
2013 MYSLENIE inteligencja
więcej podobnych podstron