POLITECHNIKA ŚWIĘTOKRZYSKA
LABORATORIUM PODSTAW AUTOMATYZACJI
Numer ćwiczenia:
1
Temat ćwiczenia:
Dobór nastaw regulatora PID
Zespół:
Wójcik Dariusz
Rogala Daniel
Data wykonania:
14.01.12
Data oddania do sprawdzenia:
14.01.1
Ocena:
1. Cel ćwiczenia
Celem ćwiczenia jest zapoznanie się z metodami doboru nastaw regulatora PID.
Porównanie różnych kryteriów doboru nastaw pod kątem wpływu na parametry odpowiedzi
układu regulacji na skokowy sygnał zadany lub skokowe zakłócenie.
2. Dane obiektu
Transmitancja obiektu
G(s)=
3. Zadania do wykonania
W schemacie blokowym zapisać parametry transmitancji wskazanej przez prowadzącego.
1. Metodą prób i błędów określić wartości wzmocnienia krytycznego K
kr
2. Odczytanie z wykresu czasu oscylacji Tosc
3. Wyznaczenie odpowiedzi dla regulatorów P, PI, PID korzystając z metody Zieglera-
Nicholsa.
4. Wyznaczenie wskaźników:
a) Wartości ustalonej h
u
b) Czasu narastania t
h
c) Czasu regulacji t
r
d) Uchybu ustalonego e
u
e) Przeregulowania X
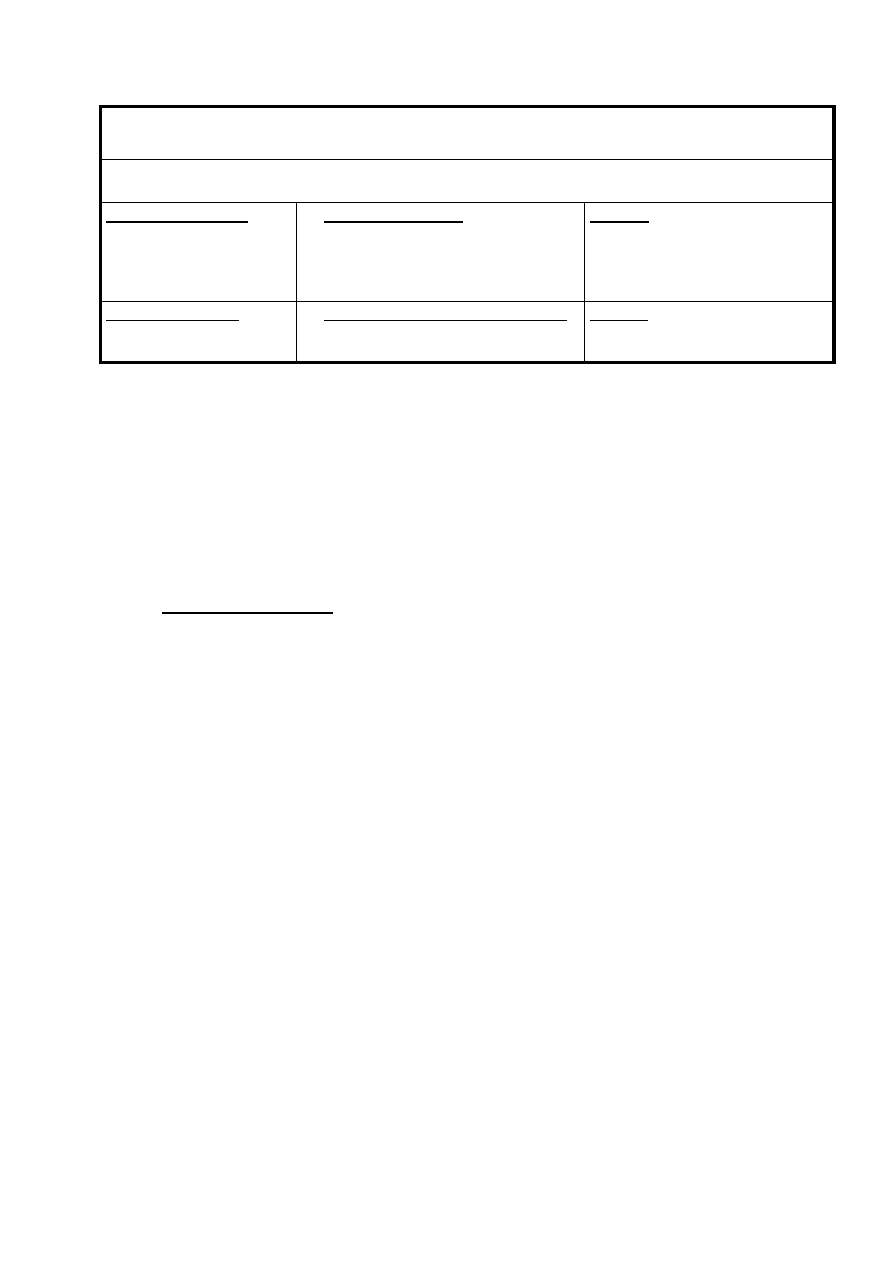
Ad. 1
Aby zapisać transmitancje naszą w układzie symulacji we właściwościach obiektu
regulacji w polu denominator zapisujemy współczynniki wielomianu znajdującego się w
mianowniku jak przedstawia to poniższy rysunek.
Ad. 2
Kolejnym zadaniem jest wyznaczenie K
kr
metodą prób i błędów. W tym celu w
schemacie regulatora w simulinku zmieniamy przełączniki tak, by pracował on jako regulator
proporcjonalny P. Następnie tak dobieramy jego wzmocnienie, odpowiednio je zwiększając
lub zmniejszając w kolejnych krokach, aby układ znalazł się na granicy stabilności.
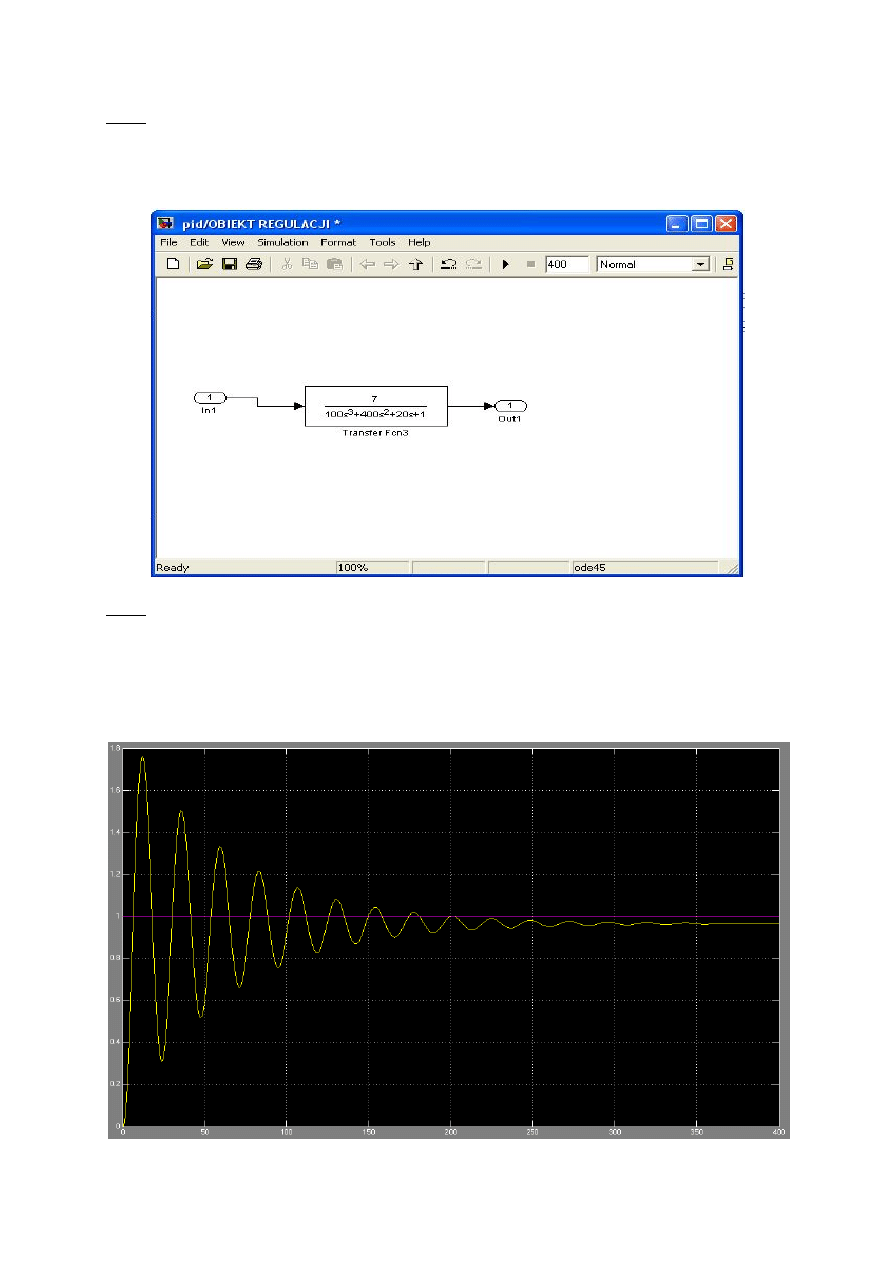
Schemat regulatora oraz wykres ze zbyt niskim dobranym wzmocnieniem przedstawia
poniższy wykres. Gdzie wyraźnie widać, ze wraz z upływem czasu układ rozbiega się.
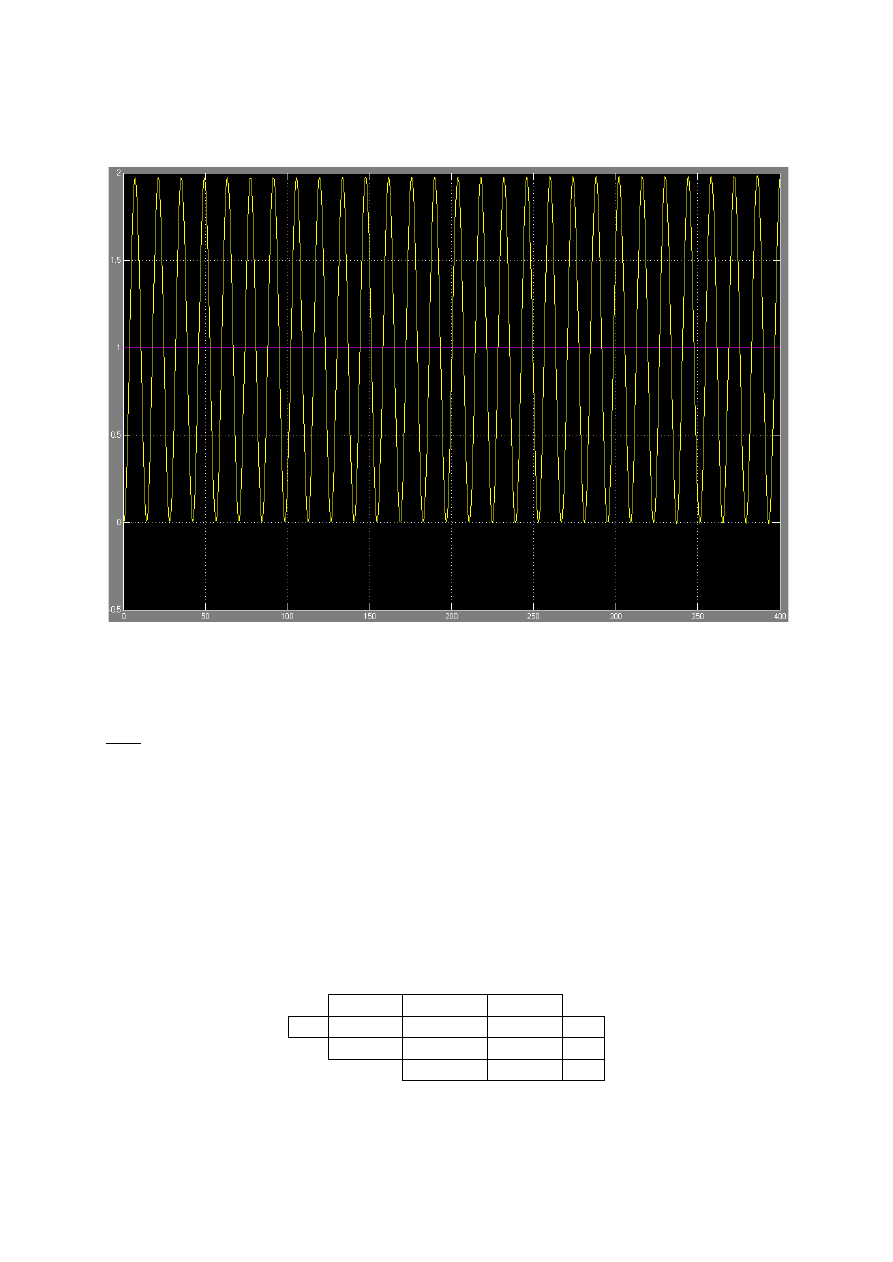
W kolejnych próbach odpowiednio zwiększając lub zmniejszając wzmocnienie
doprowadzamy układ na granicę stabilności. Odpowiedź układu na wymuszenie skokowe
przedstawia się wówczas następująco.
Dla naszej transmitancji K
kr
wynosi 8.
K
kr
=11,3
Ad.3
Kolejnym zadaniem jest odczytanie z tego wykresu czasu oscylacji Tosc, czyli czasu
jednego pełnego przebiegu sinusoidy. Odpowiednio modelujemy wykres by odczytać czas.
T
osc
=T
k
-T
p
T
osc
=17,82-3,75
T
osc
=14,07
Ad. 4
Korzystając z tabeli doboru nastaw metodą Zieglera-Nicholsa obliczamy wartości
parametrów dla regulatorów P, PI, PID
P
PI
PID
K
p
0,45K
kr
0,45K
kr
0,6K
kr
K
p
T
i
0,85T
osc
0,5T
osc
T
i
T
d
0,12T
osc
T
d
P
PI
PID
K
p
5,08
5,08
6,78
K
p
T
i
11,95
7,03
T
i
T
d
1,68
T
d
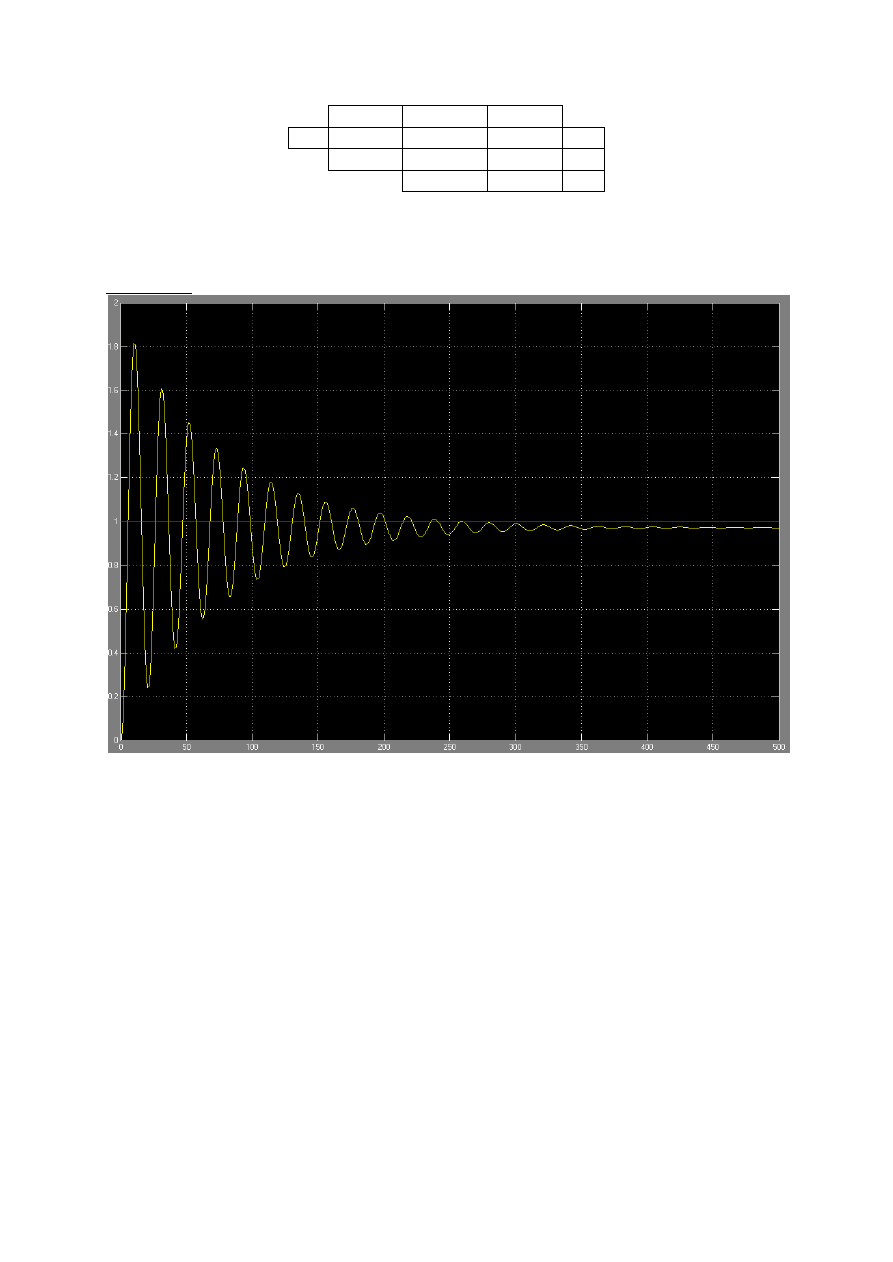
Po zadaniu wyliczonego wzmocnienia otrzymujemy następującą odpowiedź układu:
Regulator P
a) Wartość ustalona h
u
h
u
= 0,97
b) Czas narastania t
n
h
u
= 0,97 * 90% = 0,87
t
n
= 5,2s
c) Czas regulacji t
r
h
u
* 110% = 1,06
h
u
* 90% = 0,87
t
r
= 176s
dla h
u
= 110%
d) Uchyb ustalony e
e
u
= 1 – h
u
e
u =
1 – 0,97
e
u
= 0,03
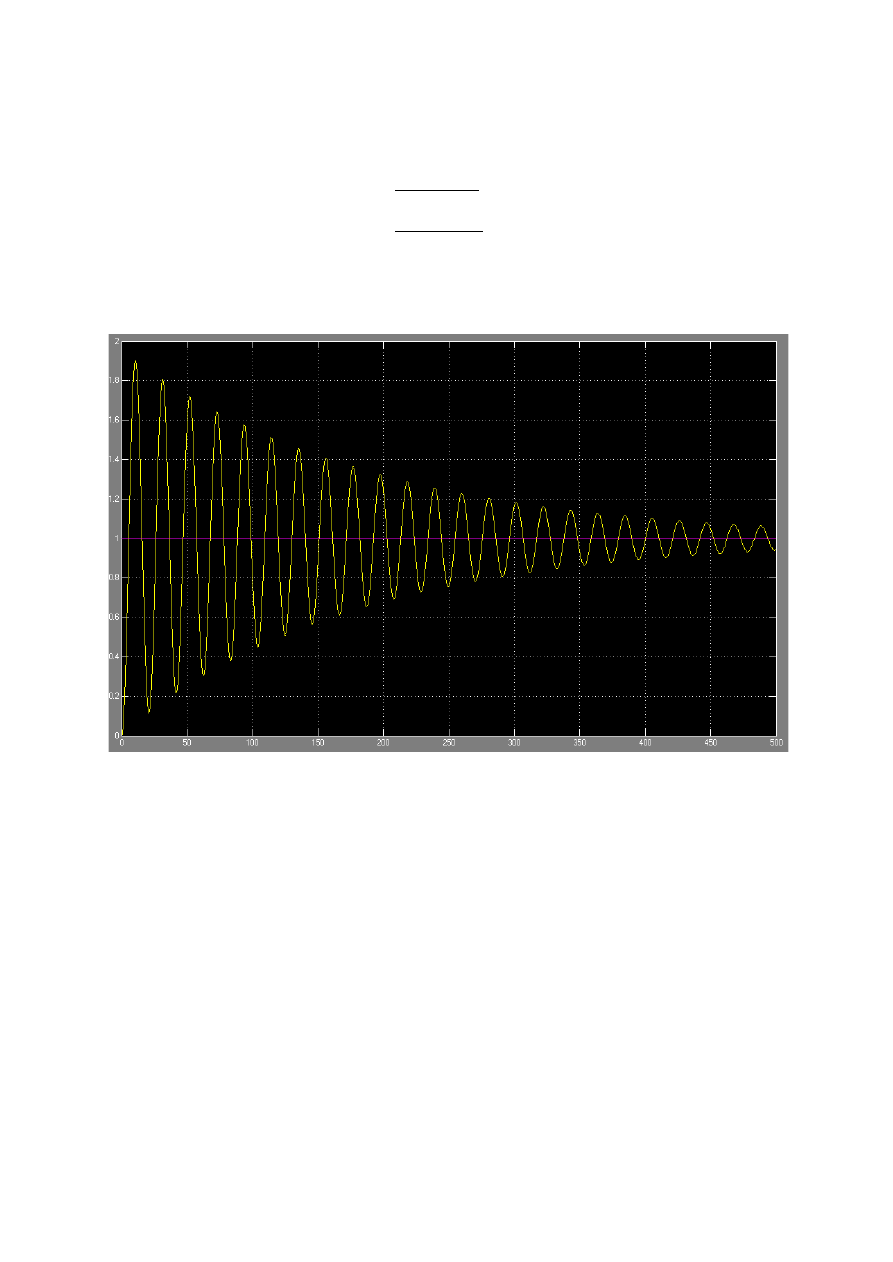
e) Przeregulowanie X
h
max
= 1,81
X =
hmax − hu
hu
100%
X =
1,81 − 0,97
0,97
100%
X=86%
Regulator PI
a) Wartość ustalona h
u
h
u
= 1
b) Czas narastania t
n
h
u
= 1 * 90% = 0,9
t
n
= 5,2s
c) Czas regulacji t
r
h
u
* 110% = 1,1
h
u
* 90% = 0,9
t
r
= 405s
dla h
u
= 110%
d) Uchyb ustalony e
e
u
= 1 – h
u
e
u =
1 – 0
e
u
= 0
e) Przeregulowanie X
h
max
= 1,90
X =
hmax − hu
hu
100%
X =
1,90 − 1
1
100%
X=90%
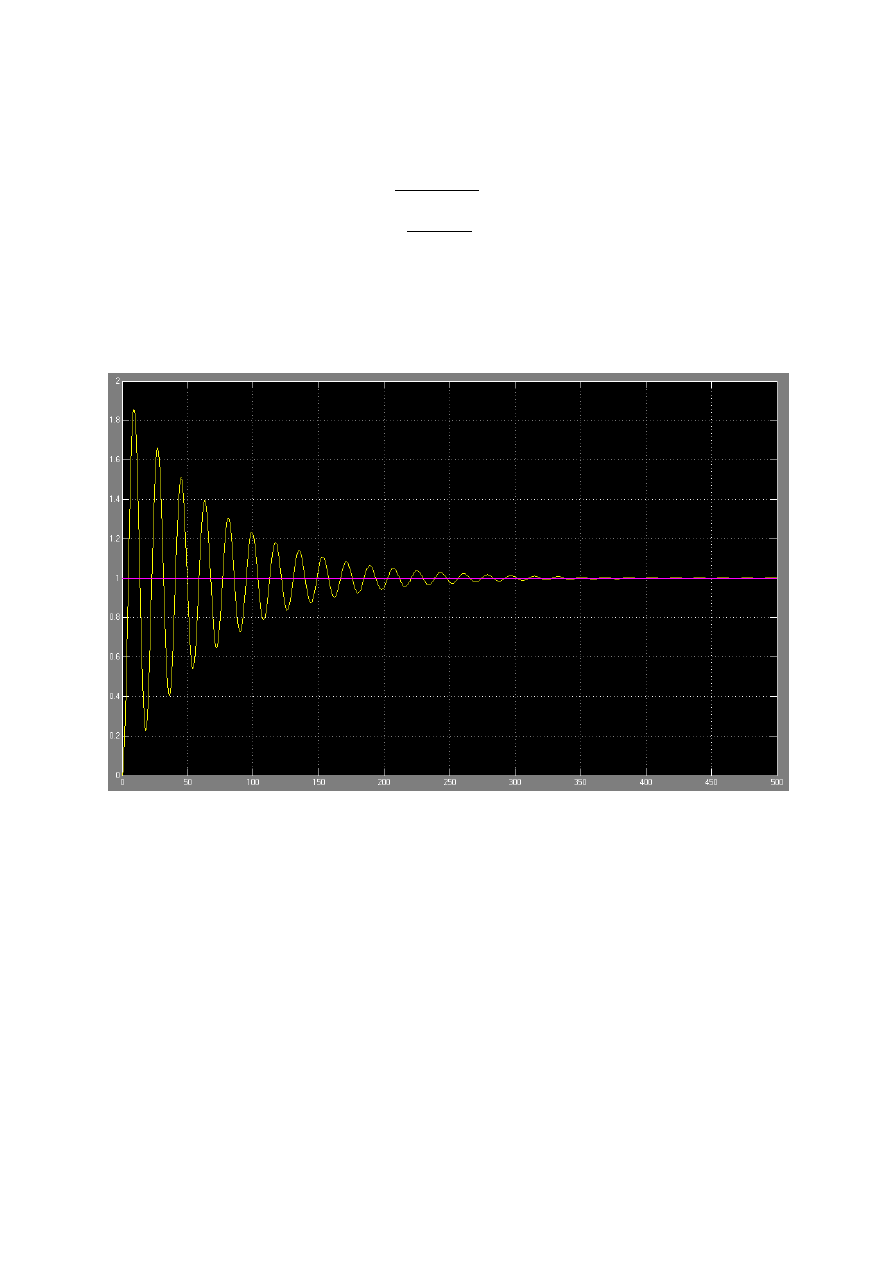
Regulator PID
a) Wartość ustalona h
u
h
u
= 1
b) Czas narastania t
n
h
u
= 1 * 90% = 0,9
t
n
= 4,35s
c) Czas regulacji t
r
h
u
* 110% = 1,1
h
u
* 90% = 0,9
t
r
= 154s
dla h
u
= 110%
d) Uchyb ustalony e
e
u
= 1 – h
u
e
u =
1 – 0
e
u
= 0

e) Przeregulowanie X
h
max
= 1,85
X =
hmax − hu
hu
100%
X =
1,85 − 1
1
100%
X=85%
4. Wnioski
Przeprowadzone ćwiczenie miało za zadanie pokazać jak w praktyczny sposób
dobierać nastawy regulatora metodą Zieglera-Nicholsa. Po przeprowadzonym doświadczeniu
jesteśmy w stanie zauważyć, że dla danej transmitacji najlepszy będą regulator całkująco-
różniczkujący. Posiada on najlepsze wskaźniki od pozostałych regulatorów, tzn. czas regulacji
(154s) i narastania(4,35s) oraz przeregulowanie(85%).
Wyszukiwarka
Podobne podstrony:
01. strona tytułowa, Nawierzchnie drogowe, Sprawozdanie, Zaoczne
Wyzga gr41 Sprawozdanie Zaoczne
Granice nauki Nowe sposoby wyjścia z kryzysu nauki Katarzyna Wójcik, I rok mgr s zaoczne
notatek-pl-Analiza sprawozda+ä finansowych, Studia UEK Kraków Zarządzanie zaoczne, Analiza sprawozda
Sprawozdanie 4, PK WiL Budownictwo zaoczne, II, GDZ (GEODEZJA)
cw.29-sprawozdanie, Studia zaoczne PWR, semestr 3, regresja
Matlab cw1 2 zaoczni
Wyklad1 bilans BK dzienne zaoczne cr (1)
pytania przykladowe exam zaoczne(1)
ZFP (24h) zaoczni materialy
2 definicje i sprawozdawczośćid 19489 ppt
Egzamin zaoczne
Wyklad 2 Zaoczni
PROCES PLANOWANIA BADANIA SPRAWOZDAN FINANSOWYC H
Zaoczny I Wyklad 3
W 11 Sprawozdania
więcej podobnych podstron