301
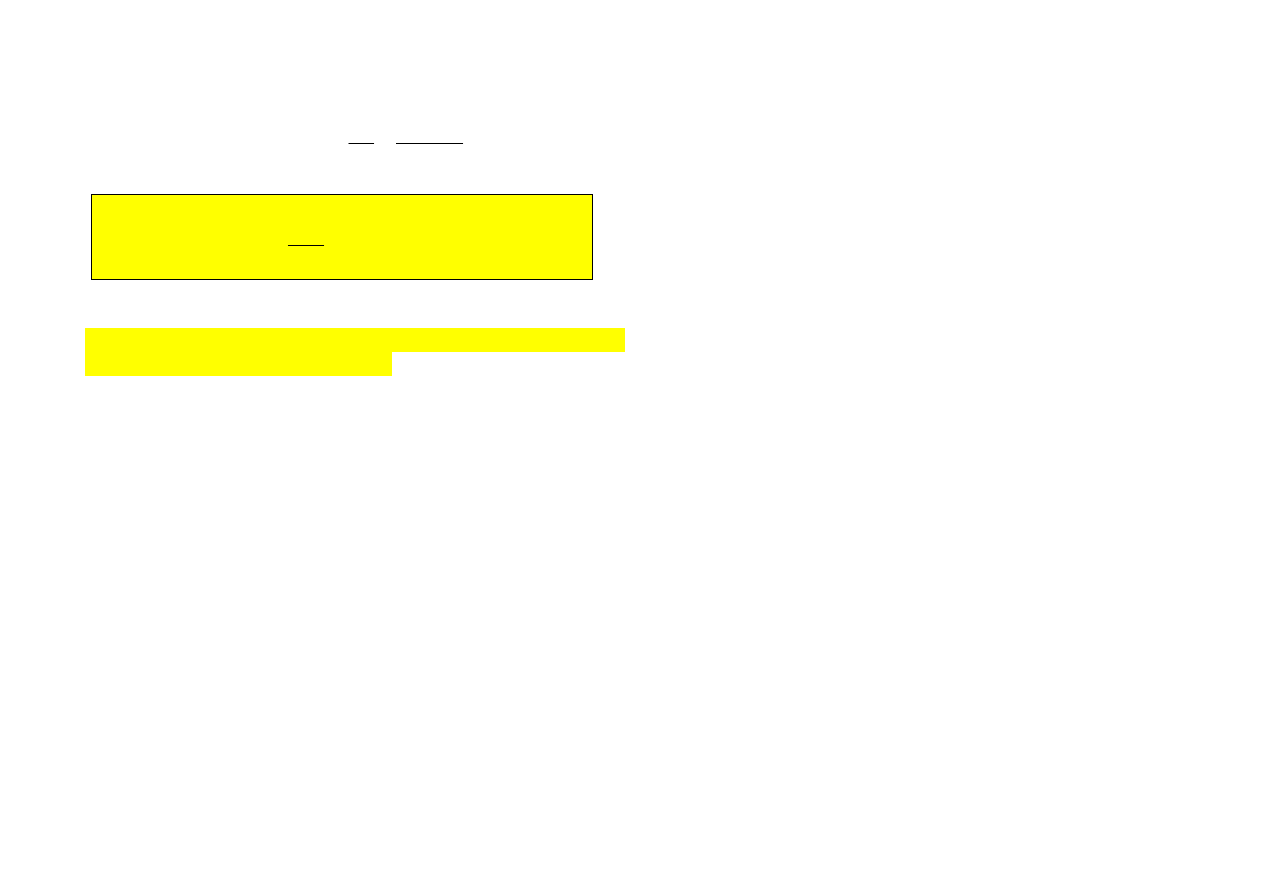
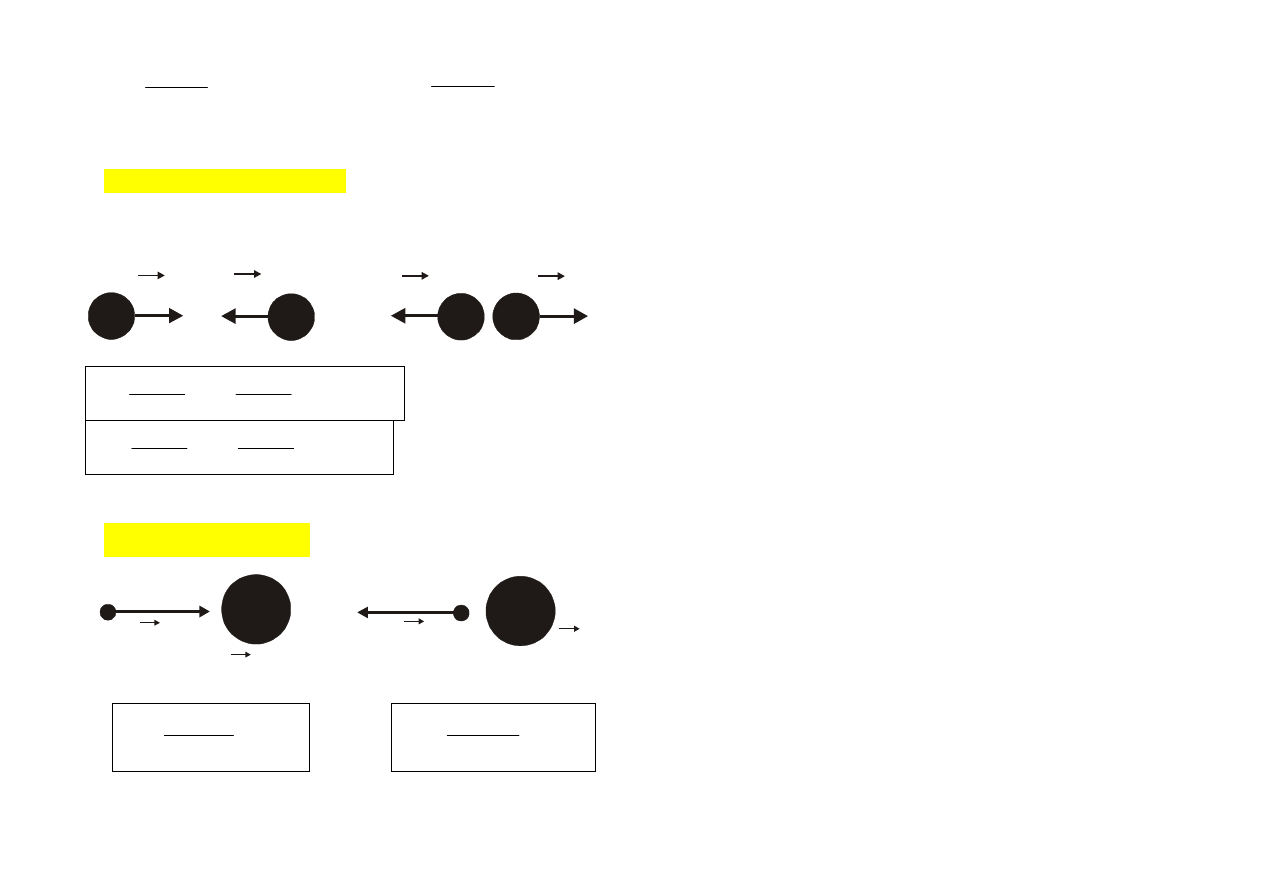
DYSKRETNY UKŁAD PUNKTÓW
MATERIALNYCH
ŚRODEK MASY
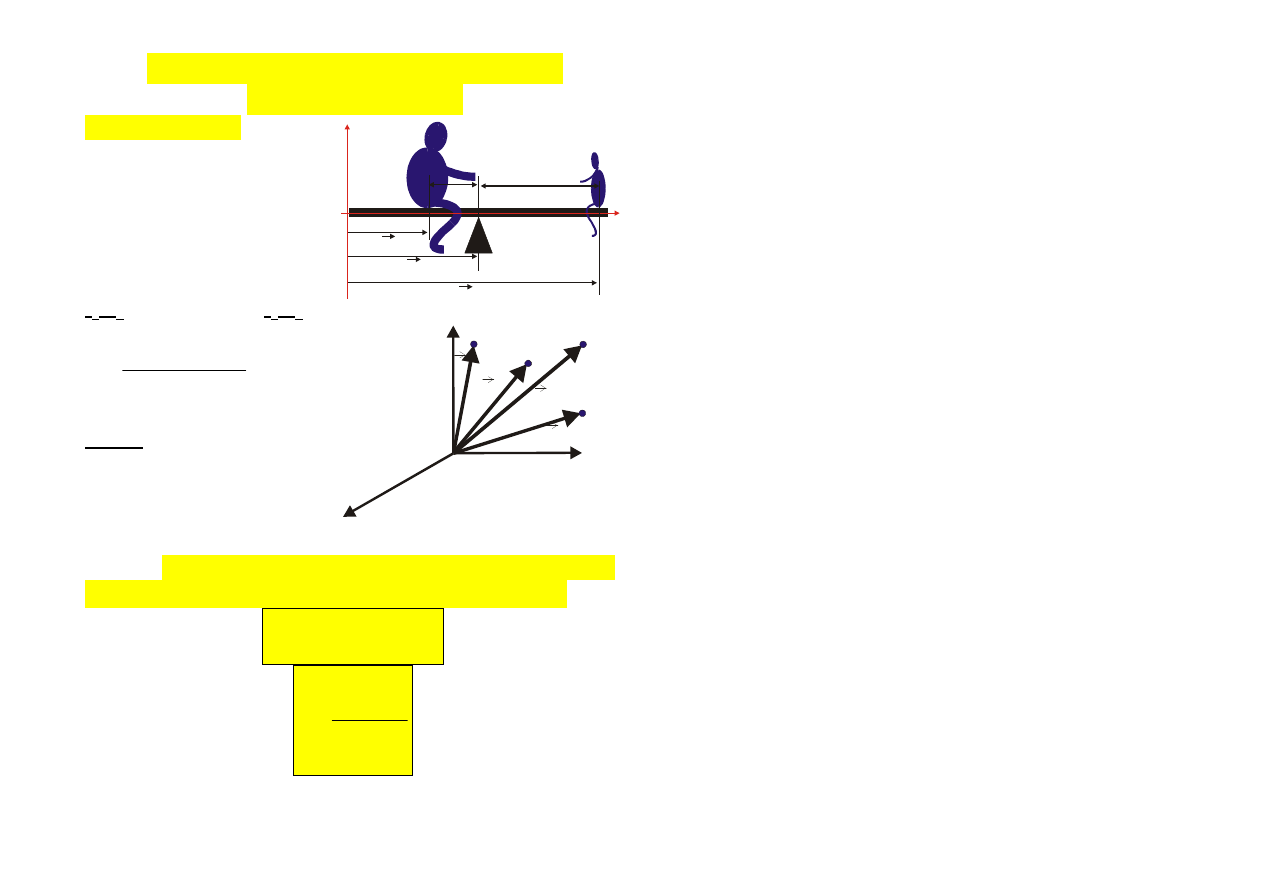
Przykład intuicyjny -
gdzie znajduje się
środek masy. ukł?
a
1
m
1
=
a
2
m
2
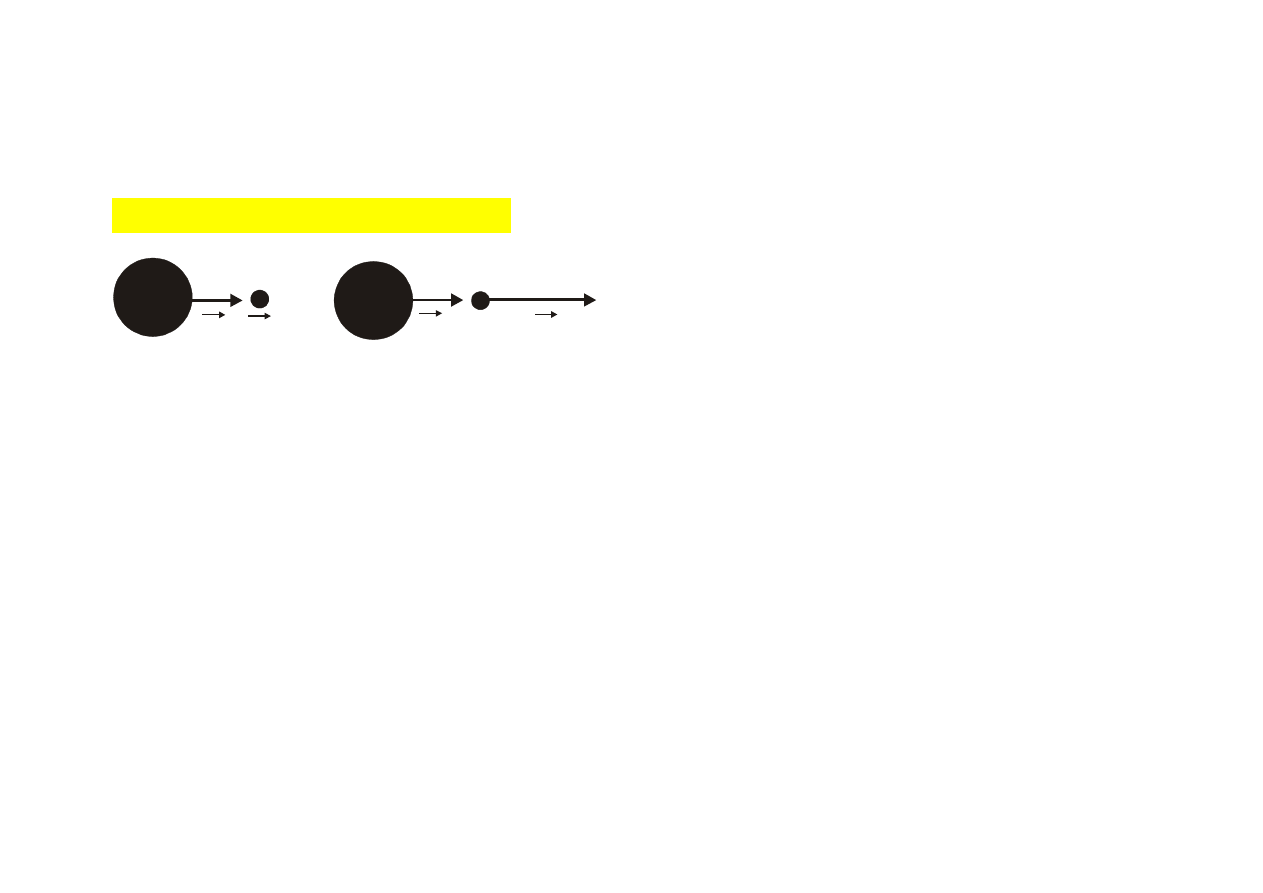
w ukł. współż. XY:
(r
s
- r
1
) m
1
= (r
2
- r
s
) m
2
r
s
m
1
- r
1
m
1
= r
2
m
2
- r
s
m
2
r
s
m
1
+ r
s
m
2
= r
1
m
1
+ r
2
m
2
2
1
2
2
1
1
s
m
m
m
r
m
r
r
⋅
+
⋅
+
⋅
=
.
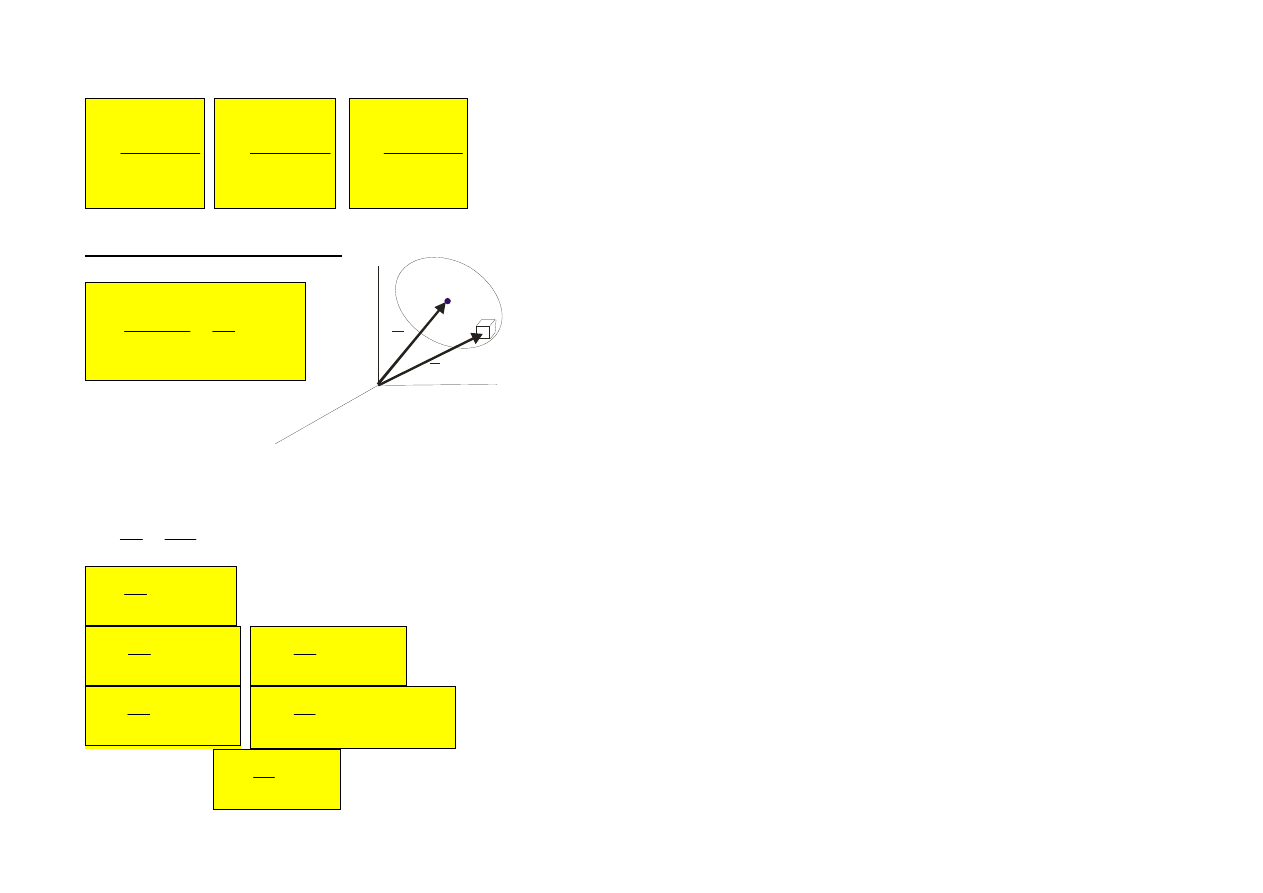
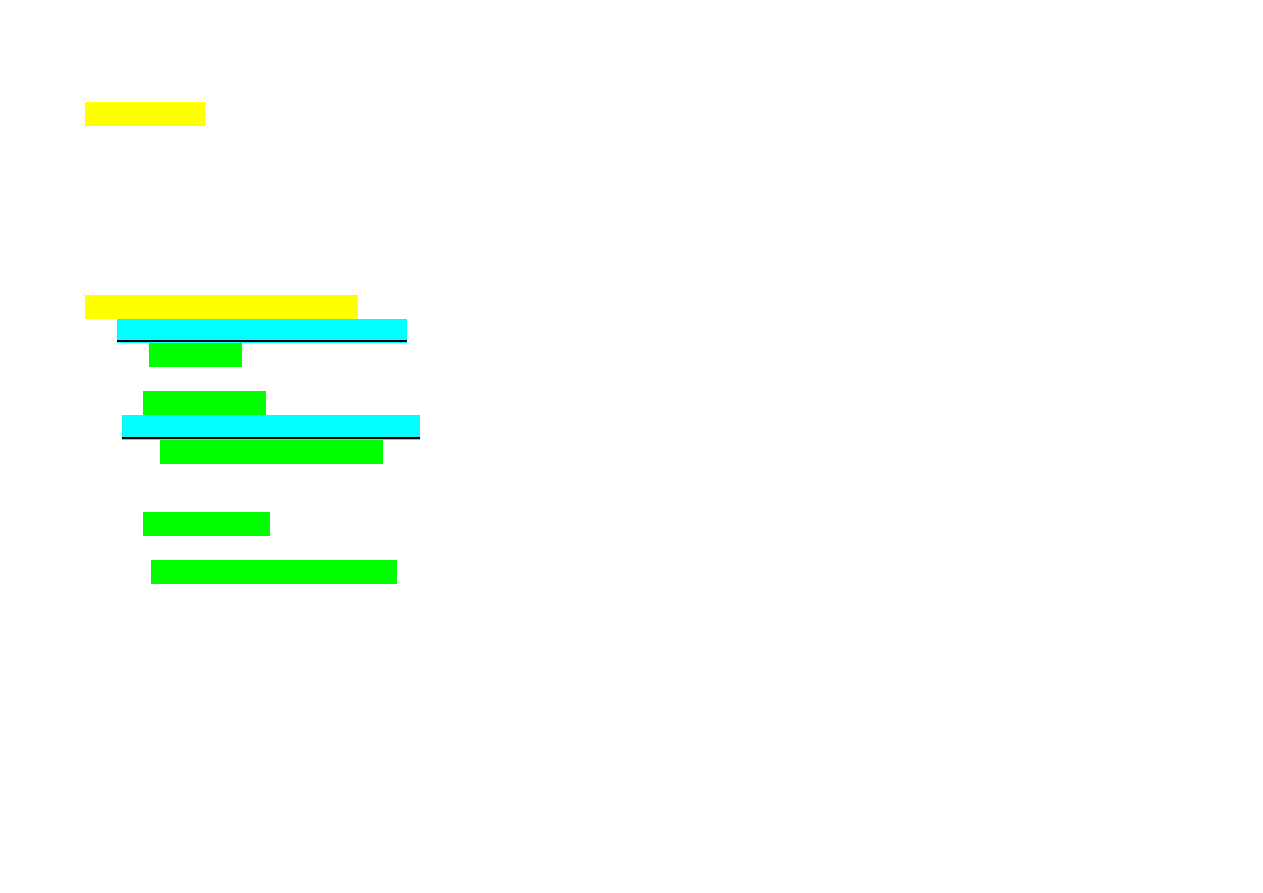
Dane:
dyskretny ukł. pp mater.
m
1
, m
2
, m
3
, ... , m
n
,
1
r
r
,
2
r
r
,
3
r
r
, ... ,
n
r
r
,
Tw.: Środkiem masy ukł. pp materialnych nazywamy
punkt, którego wektor wodzący
s
r
r
spełnia równanie:
∑
∑
=
=
⋅
=
⋅
n
1
i
i
i
n
1
i
i
s
r
m
m
r
r
r
,
∑
∑
∑
∑
∑
∑
∑
∑
=
==
=
=
==
=
⋅⋅⋅⋅
====
n
1
i
i
n
1
i
i
i
s
m
r
m
r
r
r
.
X
Y
Z
r
r
r
r
1
1
2
n
2
s
s
n
m
m
m
m
m
a
r
r
r
a
1
1
2
s
1
2
2
X
Y
302
X
Y
Z
r
s
s
r
dm
dV=dx dy dz
. .
Ponieważ:
∧
∧
∧
∧
∧
∧
∧
∧
∧
∧
∧
∧
⋅⋅⋅⋅
++++
⋅⋅⋅⋅
++++
⋅⋅⋅⋅
====
k
z
j
y
i
x
r
s
r
r
v
r
∑
∑
∑
∑
∑
∑
∑
∑
=
==
=
=
==
=
⋅⋅⋅⋅
====
n
1
i
i
n
1
i
i
i
m
x
m
x
,
∑
∑
∑
∑
∑
∑
∑
∑
=
==
=
=
==
=
⋅⋅⋅⋅
====
n
1
i
i
n
1
i
i
i
m
y
m
y
,
∑
∑
∑
∑
∑
∑
∑
∑
=
==
=
=
==
=
⋅⋅⋅⋅
====
n
1
i
i
n
1
i
i
i
m
z
m
z
Dla ciągłego rozkładu masy:
∫∫∫∫
∫∫∫∫
∫∫∫∫
⋅⋅⋅⋅
====
⋅⋅⋅⋅
====
M
M
M
s
dm
r
M
1
dm
dm
r
r
r
r
r
W praktyce trudno całkować po masie
dm → dV,
dV
dm
V
M ====
====
ρρρρ
→
dV
dm
⋅⋅⋅⋅
ρρρρ
====
∫∫∫∫
⋅⋅⋅⋅
⋅⋅⋅⋅
ρρρρ
====
V
s
dV
r
M
1
r
r
r
∫∫∫∫
⋅⋅⋅⋅
⋅⋅⋅⋅
ρρρρ
====
V
s
dV
x
M
1
x
∫∫∫∫
⋅⋅⋅⋅
⋅⋅⋅⋅
ρρρρ
====
V
s
dV
y
M
1
y
∫∫∫∫
⋅⋅⋅⋅
⋅⋅⋅⋅
ρρρρ
====
V
s
dV
z
M
1
z
∫∫∫
⋅
⋅
ρ
=
z
,
y
,
x
s
dxdydz
x
M
1
x
.
Dla ρ=Const
∫
⋅
ρ
=
V
s
dV
r
M
r
r
r
.
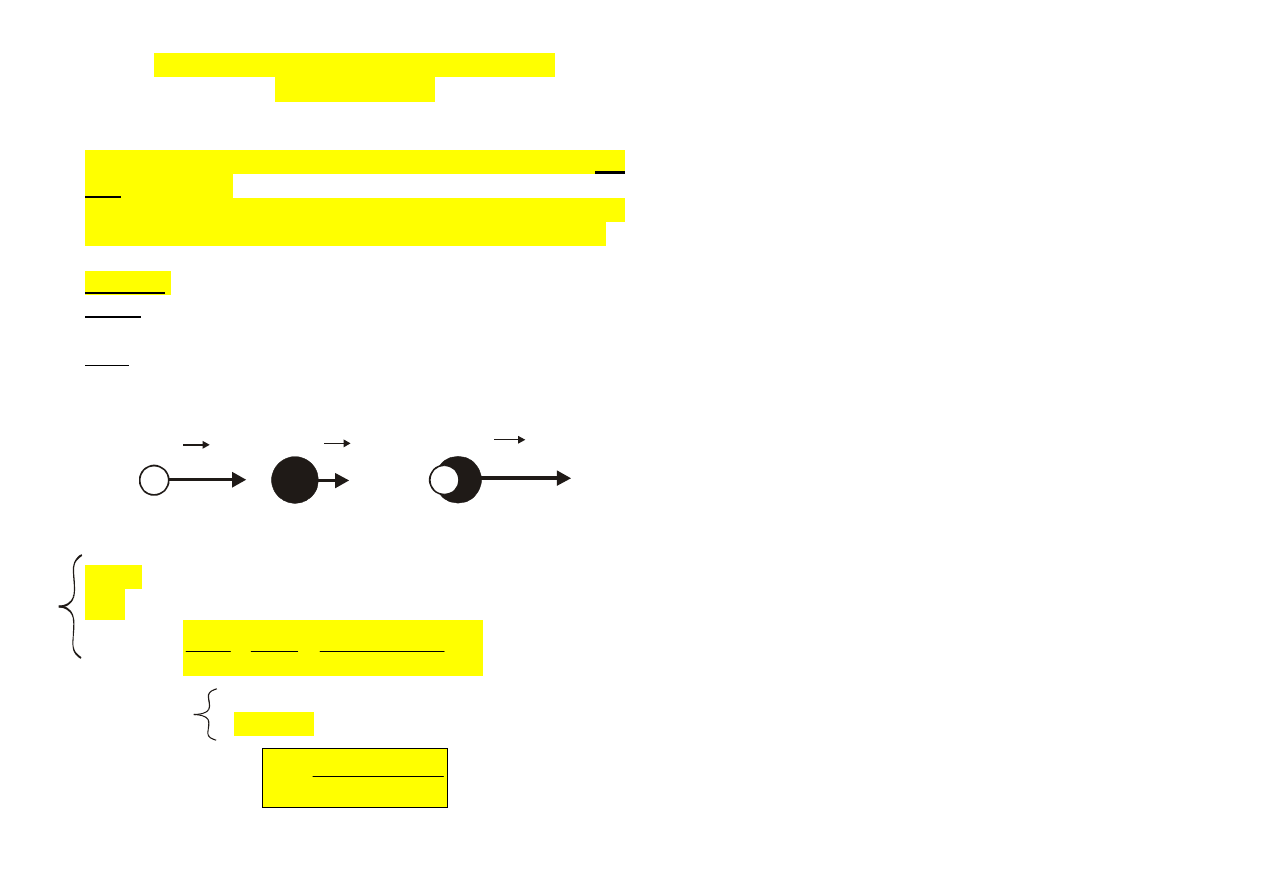
303
RUCH ŚRODKA MASY
z def. ś.m.:
∑
∑
∑
∑
=
==
=
⋅⋅⋅⋅
====
⋅⋅⋅⋅
n
1
i
i
i
s
r
m
M
r
r
r
dt
d
/
∑
∑
∑
∑
=
==
=
⋅⋅⋅⋅
====
⋅⋅⋅⋅
====
n
1
i
i
i
s
s
v
m
v
M
dt
r
d
M
r
r
r
pęd środka masy = sumie pędów
∑
∑
∑
∑
=
==
=
====
n
1
i
i
s
p
p
r
r
∑
∑
∑
∑
=
==
=
⋅⋅⋅⋅
====
⋅⋅⋅⋅
n
1
i
i
i
s
v
m
v
M
r
r
/dt zróżniczkujmy
(
)
∑
=
⋅
=
n
1
i
i
i
s
dt
v
m
d
dt
v
d
M
r
r
s
s
a
M
dt
v
d
M
r
r
⋅
=
,
(
)
∑
∑
∑
=
=
=
=
=
⋅
n
1
i
i
n
1
i
i
n
1
i
i
i
F
dt
p
d
dt
v
m
d
r
r
r
R-nie ruchu ś.m.:
∑
∑
=
=
=
=
=
⋅
=
n
1
i
i
n
1
i
i
s
s
s
dt
p
d
F
dt
p
d
a
M
F
r
r
r
r
r
Suma wektorowa sił przyłożonych do poszczególnych
punktów materialnych.
Rodzaje sił działających na p. mat.:
1. siły zewn.
Zi
F
r
2. siły wewn.
Wi
F
r
Równanie ruchu ś.m. można zatem zapisać:
304
∑
∑
∑
∑
∑
∑
∑
∑
=
==
=
=
==
=
++++
====
⋅⋅⋅⋅
n
1
i
Wi
n
1
i
Zi
s
F
F
a
M
r
r
r
Siły wewn. to siły wzajemnego oddziaływania punktów na
siebie. Jeśli pogrupujemy je w pary (dwójki), to zgodnie z
III ZDN będą się parami znosić, a więc:
0
F
n
1
i
Wi
====
∑
∑
∑
∑
=
==
=
r
czyli:
∑
∑
∑
∑
=
==
=
====
⋅⋅⋅⋅
n
1
i
Zi
s
F
a
M
r
r
∑
∑
=
=
=
=
=
⋅
=
n
1
i
i
n
1
i
Zi
s
s
s
dt
p
d
F
dt
p
d
a
M
F
r
r
r
r
r
To jest II ZDN dla dyskretnego układu punktów
materialnych (II ZDN DUPM)
305
ZSADA ZACHOWANIA PĘDU (ZZP)
wynika wprost z II ZDN:
((((
))))
dt
v
m
d
dt
p
d
F
r
r
r
⋅⋅⋅⋅
====
====
Gdy
F
→
= 0
, to
d p
dt
→
= 0
, czyli
p
Const
→
=
.
Zasada zachowania pędu (ZZP):
ZZP: pęd punktu materialnego, na który nie działa
żadna siła jest wielkością stałą.
306
ZASTOSOWANIE ZASADY ZACHOWANIA PĘDU
ZDERZENIA
ZZP obowiązuje w każdym procesie fizycznym, zarówno
w makro-świecie (zjawiska galaktyczne) jak i mikro-
świecie (procesach jądrowych) i nie znane są odstępstwa.
Najłatwiejszymi
przykładami
ilustrującymi
ZZP
są
zderzenia:
Zderzenia można podzielić:
(I). ze względu na trajektorie ruchu na:
a). centralne - gdy środki kul poruszają się po tej
samej prostej,
b). niecentralne,
(II). ze względu na spełnienie ZZEM na:
a). doskonale sprężyste - gdy cała energia
mechaniczna zderzenia zamienia się na energię
mechaniczną - spełnione są ZZEM + ZZP (+ZZE)
b). niesprężyste - spełnione są ZZP (+ZZE), a nie jest
spełniona ZZEM
c). doskonale niesprężyste - ciała po zderzeniu
poruszają się razem - spełnione są ZZP (+ZZE), a
nie jest spełniona ZZEM.
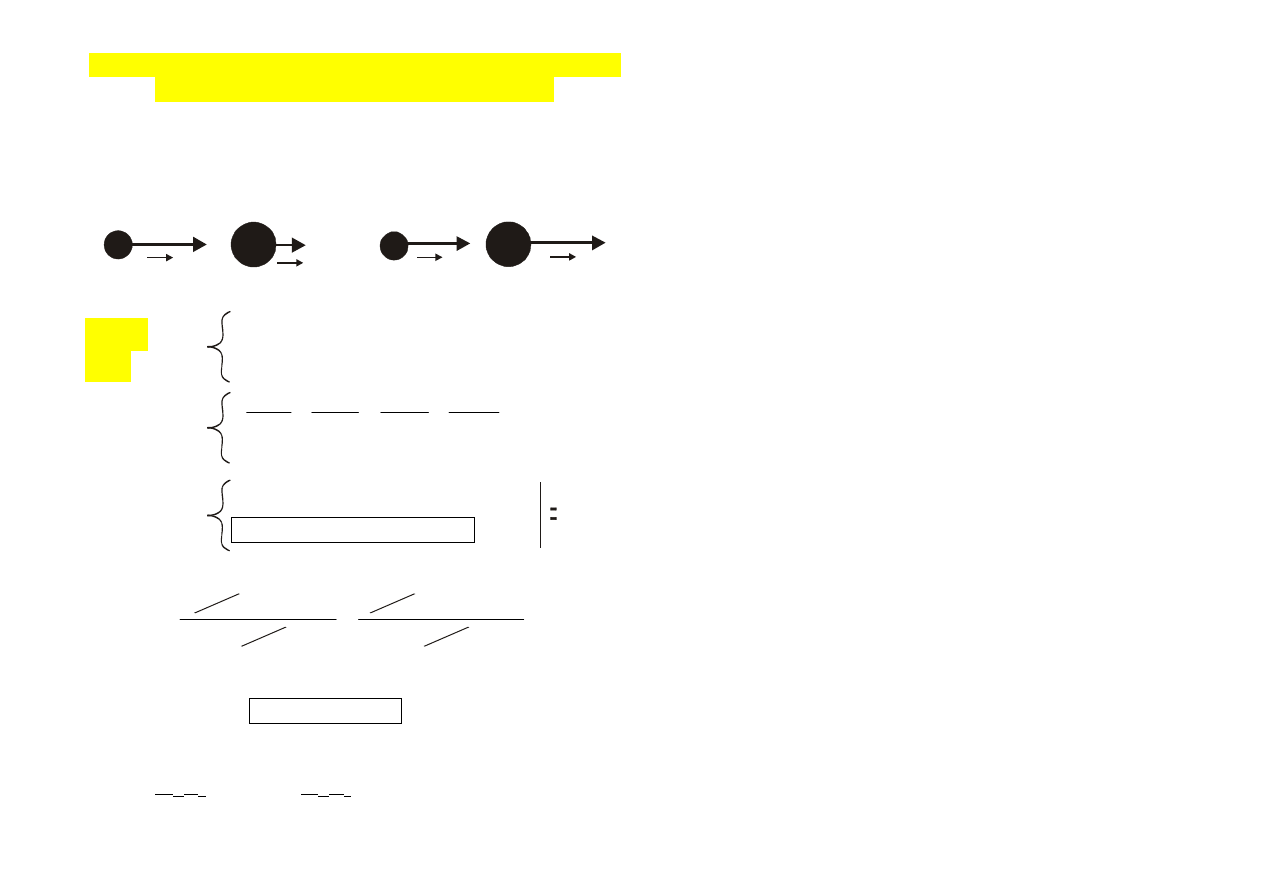
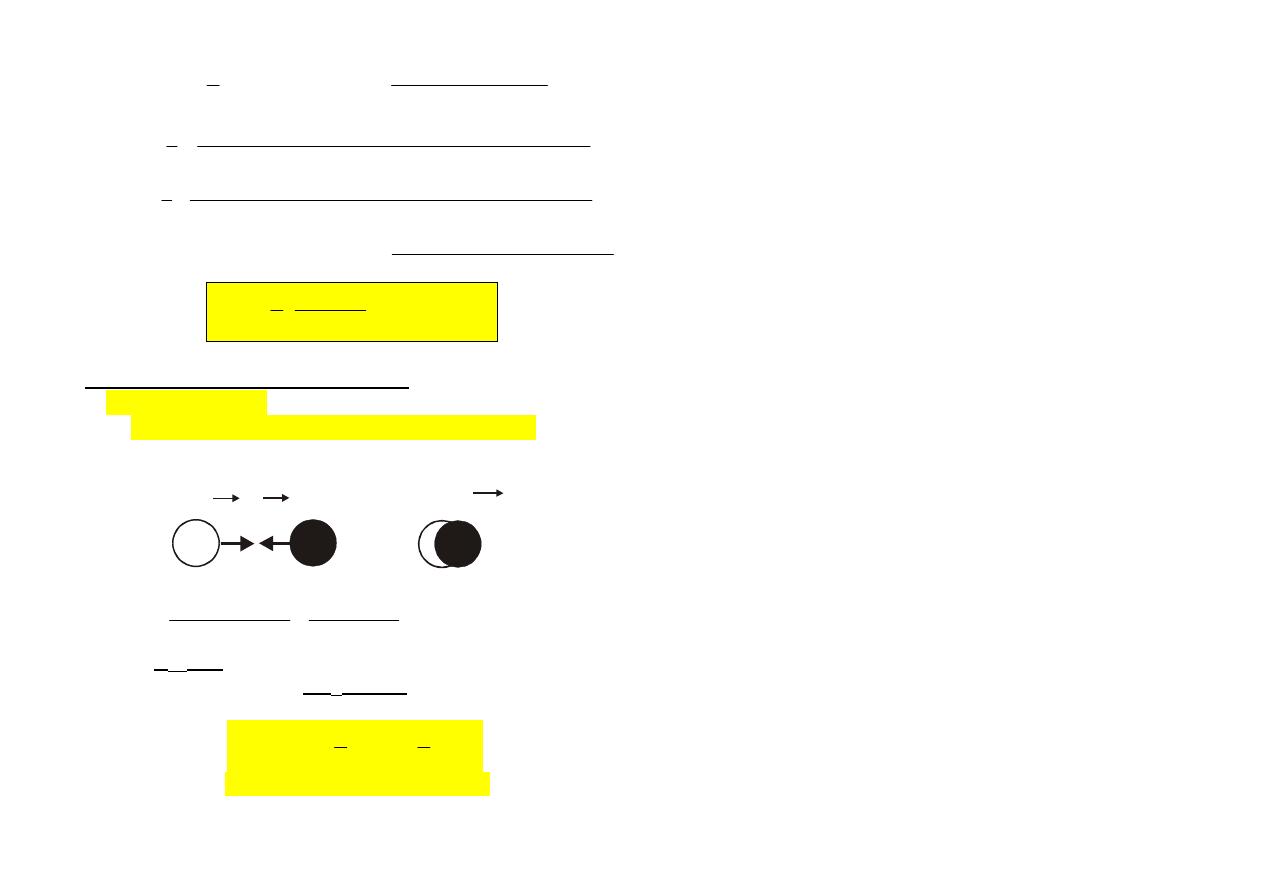
307
ZDERZENIA CENTRALNE, DOSKONALE SPRĘŻYSTE
W PRZESTRZENI JEDNOWYMIAROWEJ
Dane: masy kul m
1
i m
2
, prędkości przed zderzeniem v
1
i
v
2
. Obl.: prędkości kul po zderzeniu v'
1
i v'
2
?
przed zderzeniem:
po zderzeniu:
v
1
v'
1
v
2
v'
2
Stosujemy:
ZZEM:
∑
∑
=
'
k
k
E
E
,
ZZP:
∑ ∑
=
'
p
p
r
r
.
ZZEM
2
'
v
m
2
'
v
m
2
v
m
2
v
m
2
2
2
2
1
1
2
2
2
2
1
1
+
=
+
, /·2
ZZP: m
1
v
1
+ m
2
v
2
= m
1
v'
1
+ m
2
v'
2
.
Przenieśmy m
1
z lewej strony równań, a m
2
z prawej:
)
v
'
v
(
m
)
'
v
v
(
m
2
2
2
2
2
2
1
2
1
1
−
=
−
,
m
1
(v
1
– v'
1
) = m
2
(v'
2
– v
1
). (*)
Dzieląc ww. równania stronami otrzymujemy:
)
v'
-
(v
)
v'
(v
)
v'
-
(v
)
v'
-
(v
)
v'
(v
)
v'
-
(v
2
2
2
2
2
2
1
1
1
1
1
1
+
⋅
=
+
⋅
,
v
1
+ v'
1
= v
2
+ v'
2
,
a po uporządkowaniu
v'
2
= v
1
+ v'
1
– v
2
(**)
Obl v'
1
odstawiając równanie ** do *:
m
1
(v
1
– v'
1
) = m
2
(v
1
+ v'
1
– v
2
– v
2
),
m
1
v
1
– m
1
v'
1
= m
2
v
1
+ m
2
v'
1
– 2 m
2
v
2
,
308
v
1
(m
1
– m
2
) + 2 m
2
v
2
= v'
1
(m
1
+ m
2
).
Ostatecznie otrzymujemy:
2
2
1
2
1
2
1
2
1
1
v
m
m
m
2
v
m
m
m
m
'
v
⋅
+
⋅
+
⋅
+
−
=
,
2
2
1
1
2
1
2
1
1
2
v
m
m
m
m
v
m
m
m
2
'
v
⋅
+
−
+
⋅
+
⋅
=
.
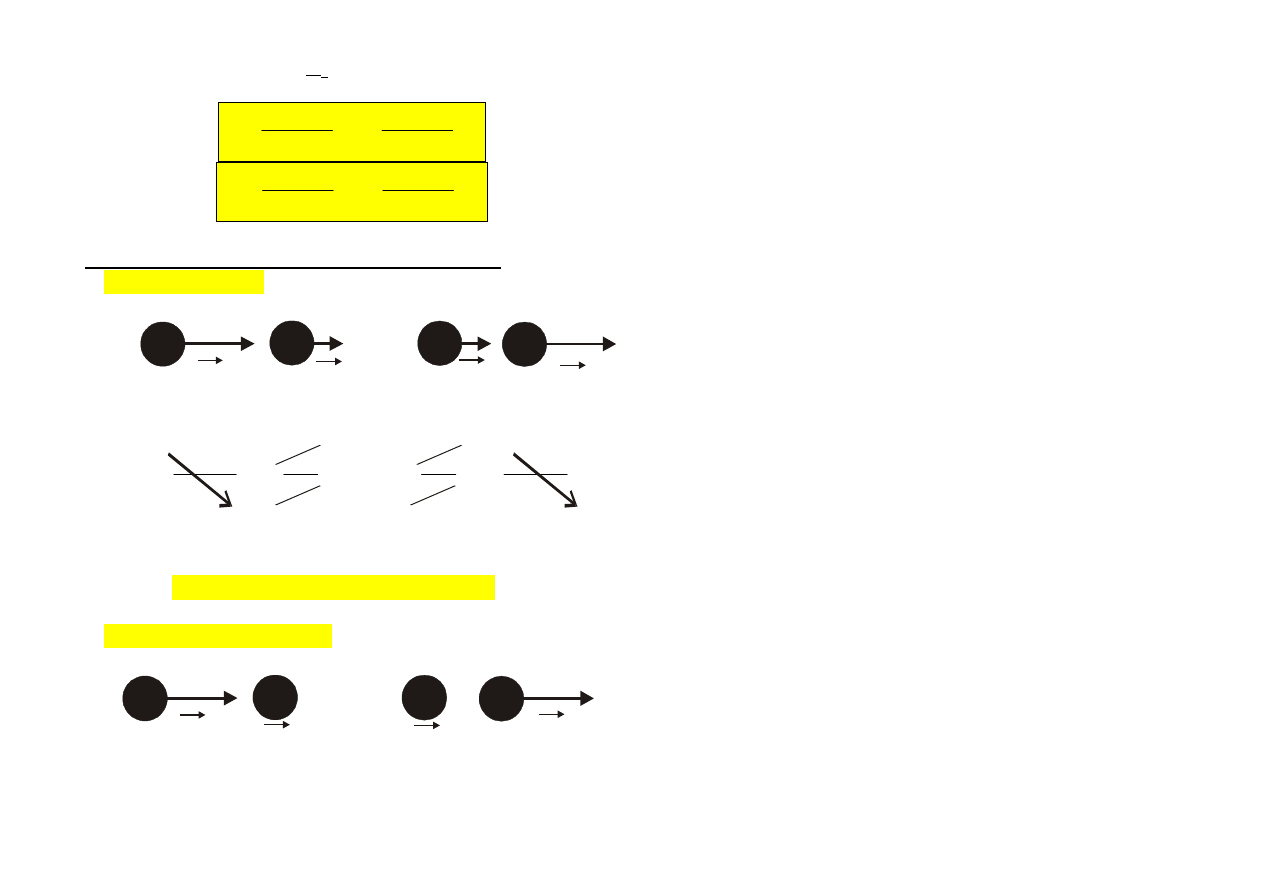
Rozpatrzmy kilka przypadków szczególnych:
● gdy m
1
= m
2
= m
v
1
v'
1
v
2
przed zderzeniem:
po zderzeniu:
v'
2
1
V
r
2
V
r
'
1
V
r
'
2
V
r
2
1
'
1
v
m
2
m
2
v
m
2
m
m
v
+
−
=
,
2
1
'
2
v
m
2
m
m
v
m
2
m
2
v
−
+
=
.
v'
1
= v
2
oraz v'
2
= v
1
czyli cząstki wymieniły się prędkościami.
● gdy m
1
= m
2
= m i v
2
= 0 (obydwa ww. przypadki): 1 stoi
v
1
v'
1
v
2
przed zderzeniem:
po zderzeniu:
v'
2
=0
=0
=0
=0
309
( )
0
v
m
m
m
m
'
v
1
1
⋅
+
+
−
=
oraz
( )
0
v
m
m
m
2
'
v
1
2
⋅
+
+
=
v'
1
= 0 oraz v'
2
= v
1
(wymiana prędkości)
● gdy m
1
= m
2
= m i v
2
=-v
1
(kule uderzają w siebie z
jednakowymi prędkościami skierowanymi przeciwnie):
v
1
v'
1
v
2
przed zderzeniem:
po zderzeniu:
v'
2
(
)
1
1
1
1
v
v
m
m
m
2
v
m
m
m
m
'
v
−
=
−
⋅
+
⋅
+
⋅
+
−
=
,
(
)
1
1
1
2
v
v
m
m
m
m
v
m
m
m
2
'
v
=
−
⋅
+
−
+
⋅
+
⋅
=
.
odbicie z przeciwnymi prędkościami (wymiana prędkości).
● gdy v
2
=0 i
m
2
>> m
1
(duża nieruchoma masa)
v
1
v'
1
przed zderzeniem:
po zderzeniu:
v'
2
v
2
=0
=0
0
v
m
m
'
v
1
2
1
m
2
1
m
1
+
⋅
+
−
=
, oraz
0
v
m
'
v
1
2
1
m
1
m
2
2
+
⋅
+
=
v'
1
≅
– v
1
oraz
v'
2
≅
0
310
odbicie m
1
od nieruchomego olbrzyma ("zderzenie
pijanego ze ścianą")
Taka sytuacja zachodzi np. przy zderzeniu cząstki
lekkiej z bardzo ciężką (spoczywającą) np. piłka
uderza o ścianę.
•
gdy v
2
=0, ale sytuacja odwrotna m
2
<<
m
1
,
v
1
v'
1
przed zderzeniem:
po zderzeniu:
v'
2
v
2
=0
v'
1
≅
v
1
oraz
v'
2
≅
2 v
1
.
Prędkość cz. ciężkiej (padającej) prawie się nie
zmienia.
311
ZDERZENIA CENTRALNE, DOSKONALE
NIESPRĘŻYSTE
W PRZESTRZENI JEDNOWYMIAROWEJ.
Przy zderzeniach
niesprężystych
energia kinetyczna
nie
jest
zachowana.
Różnica energii kinetycznej (początek – koniec) jest
zamieniana w ciepło lub energię potencjalną deformacji.
Przykład.
Dane: dwie kule z
plasteliny
o masach:
m
1
i
m
2
,
poruszające się z prędk. przed zderzeniem
v
1
i
v
2
.
Obl.: (a). prędkości kul po zderzeniu
v'
1
=
? i
v'
2
=
?
(b). zmianę energii kinet. ∆E
k
= ?
przed zderzeniem:
po zderzeniu:
v
m
m
m + m
1
1
2
2
1
v'
1
v
2
2
Stosujemy:
ZZEM:
nie jest spełniona
ZZP:
∑ ∑
=
'
p
p
r
r
ZZE:
Q
2
'
v
)
m
m
(
2
v
m
2
v
m
2
12
2
1
2
2
2
2
1
1
+
⋅
+
=
+
m
1
v
1
+ m
2
v
2
= (m
1
+ m
2
)
v'
12
Q = ∆E
M
= E
k1
+ E
k2
–E'
k12
2
1
2
2
1
1
12
m
m
v
m
v
m
'
v
+
⋅
+
⋅
=
312
+
⋅
+
⋅
−
⋅
+
⋅
⋅
=
∆
2
1
2
2
2
1
1
2
2
2
2
1
1
M
m
m
)
v
m
v
m
(
v
m
v
m
2
1
E
,
(
)
(
)
+
+
−
+
+
+
⋅
=
∆
2
1
2
2
2
1
1
2
2
2
1
2
2
1
2
1
1
M
m
m
)
v
m
v
m
(
v
m
m
m
v
m
m
m
2
1
E
++++
−−−−
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
++++
⋅⋅⋅⋅
⋅⋅⋅⋅
++++
⋅⋅⋅⋅
⋅⋅⋅⋅
++++
⋅⋅⋅⋅
⋅⋅⋅⋅
====
∆
∆
∆
∆
2
1
2
1
2
1
2
2
2
2
2
2
2
1
2
1
2
1
2
1
2
1
M
m
m
...
v
m
v
m
v
m
m
v
m
m
v
m
2
1
E
⋅⋅⋅⋅
⋅⋅⋅⋅
⋅⋅⋅⋅
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
−−−−
...
v
v
m
m
2
v
m
...
2
1
2
1
2
2
2
2
Q
)
v
v
(
m
m
m
m
2
1
E
2
2
1
2
1
2
1
M
≡
−
⋅
+
⋅
⋅
=
∆
.
Rozpatrzmy przypadek szczególny:
•
gdy m
1
= m
2
= m
oraz v
1
= –v
2
i zał. v
1
= v (czyli v
2
= –v),
Obl. v'
12
=? oraz ∆E
M
=?
przed zderzeniem:
po zderzeniu:
v
m
m
2m
1
v' =0
1
v
2
2
0
m
2
v
m
v
m
m
m
v
m
v
m
'
v
2
1
2
2
1
1
12
=
⋅
−
⋅
=
+
⋅
+
⋅
=
zatem v'
12
= 0 czyli kule zatrzymają się,
∆E
M
= m v
2
A co to znaczy?
2
2
2
v
m
2
1
v
m
2
1
v
m
Q
⋅
+
⋅
=
⋅
=
lub inaczej Q = (E
k
1 kulki) + (E
k
2 kulki)
313
Wniosek:
"Energia mechaniczna kul całkowicie
zamieniła się w ciepło"
ZDERZENIA W TRZECH WYMIARACH 3-D
Aby rozwiązać zagadnienie 3D musimy rozwiązać
układ równań składający się z:
ZZEM
∑
∑
=
k
k
'
E
E
,
ZZP (kier X)
∑
∑
=
x
x
'
p
p
,
ZZP (kier Y)
∑
∑
=
y
y
'
p
p
,
ZZP (kier Z)
∑
∑
=
z
z
'
p
p
.
ZASADA ZACHOWANIA PĘDU DLA
DYSKRETNEGO UKŁADU PUNKTÓW
MATERIALNYCH (ZZP DUPM)
Wychodząc z II ZDN dla DUPM:
∑
=
=
=
n
i
1
i
s
zi
dt
p
d
F
r
r
,
gdy
∑
=
=
=
n
i
1
i
zi
0
F
r
to
0
dt
p
d
s
=
r
, a zatem
.
Const
p
s
=
r
ZZP:
Gdy na dyskretny układ punktów materialnych nie
działają żadne siły zewnętrzne, lub siły te równoważą
się, to pęd środka masy układu odosobnionego jest
stały.
314
ZASADA ZACHOWANIA PĘDU DLA UKŁADU
ZE ZMIENNĄ MASĄ - NAPĘD ODRZUTOWY
Dotychczas zajmowaliśmy się układami o stałej masie.
Obecnie zajmiemy się układami, których masa zmienia
się podczas obserwacji.
= 0
V
K
V
U
V
Ł
Idea - ZZP:
L
L
K
K
v
m
v
m
r
r
⋅⋅⋅⋅
====
⋅⋅⋅⋅
(gdzie Ł - łódka, K - "Student")
np:
1. odrzut karabinu,
2. samolot odrzutowy (wyrzut sprężonych, produktów
spalania: paliwa i powietrza),
3. napęd rakietowy (j.w., ale rakieta wiezie ze sobą
utleniacz O
2
).
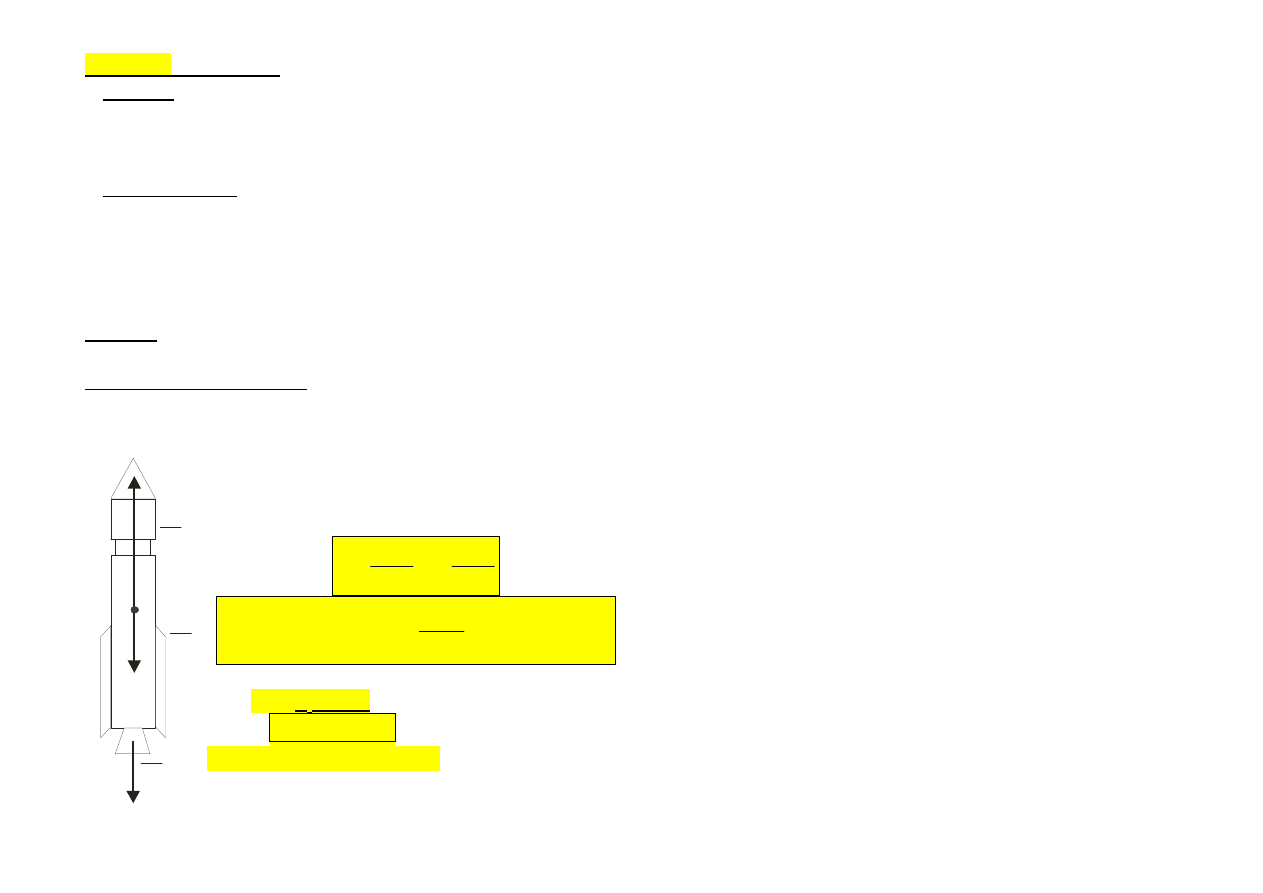
315
Przykład (K.R. 2.33)
Opisać:
a) zmianę masy rakiety w czasie
m
r
(t)=?
oraz
b) zmianę prędkości rakiety lecącej pionowo w górę
v
r
(t)=?
,
jeżeli dane są:
m
ro
- masa początkowa rakiety,
u
- względna w stosunku do rakiety prędkość
wyrzucanych produktów spalania,
µ
- szybkość zużycia produktów spalania = szybkości
zmiany (ubytku) masy rakiety µ = dm
r
/dt [kg/s].
Założyć, że prędkość produktów spalania
v
s
= v
r
– u
jest
stała w czasie
v
s
(t)=Const
. Pominąć opór powietrza.
Przyjmijmy oznaczenia:
r
- rakieta,
s
- produkty spalania
(spaliny).
(a)
. Jeżeli w pewnym przedziale czasowym
dt
z rakiety wyrzucona zostaje masa
dm
s
z
prędkością
u
to masa rakiety maleje o
dm
r
,
przy czym
t
d
m
d
t
d
m
d
r
s
−
=
=
µ
t
m
t
dt
dm
m
)
t
(
m
m
0
r
r
0
r
r
r
⋅
µ
−
=
⋅
−
=
=
(b).
Obl
v
r
(t) = ?
F
r
= F
s
– F
G
(*) (inaczej
∑
= 0
F
i
r
)
Obl.:
F
r
=?, F
s
=?, F
G
=?
F
G
F
s
s
v
s
dm
316
)
v
m
(
dt
d
)
p
(
dt
d
F
r
r
r
r
⋅
=
=
dt
dv
m
v
dt
dm
F
r
r
r
r
r
++++
⋅⋅⋅⋅
====
)
p
(
dt
d
F
s
s
−
=
znak (-) bo
s
F
r
↑ w górę, a
s
v
r
↓ w dół
=
⋅
−
=
)
v
m
(
dt
d
F
s
s
s
,
ale v
s
=Const oraz v
s
= v
r
– u
dt
dm
)
u
v
(
dt
dm
v
F
r
r
s
s
s
−
⋅
−
−
=
⋅
−
=
dt
dm
)
u
v
(
F
r
r
s
⋅
−
=
g
m
F
r
G
⋅
=
Podstawiając w.w. składniki do (*) (
F
r
= F
s
– F
G
):
g
m
dt
dm
)
u
v
(
dt
dv
m
v
dt
dm
r
r
r
r
r
r
r
⋅
−
⋅
−
=
⋅
+
⋅
,
g
m
dt
dm
u
dt
dm
v
dt
dv
m
v
dt
dm
r
r
r
r
r
r
r
r
⋅
−
⋅
−
⋅
=
⋅
+
⋅
,
II ZDN dla ruchu rakiety:
g
m
dt
dm
u
dt
dv
m
r
r
r
r
⋅
−
⋅
−
=
⋅
g
m
dt
dm
u
dt
dv
m
r
r
r
r
⋅
−
⋅
−
=
⋅
/·dt/m
r
dt
g
m
dm
u
dv
r
r
r
⋅
−
⋅
−
=
, /
∫
∫
∫
∫
⋅
−
⋅
−
=
=
t
0
m
m
r
r
v
0
r
r
dt
g
m
dm
u
dv
v
r
0
r
r
,
t
0
m
m
r
r
]
t
g
)]
m
ln(
u
v
r
r
0
⋅
−
⋅
−
=
,
317
)
t
(
v
t
g
m
m
ln
u
v
r
0
r
r
r
=
⋅
−
⋅
−
=
,
=
−
r
0
r
0
r
r
m
m
ln
m
m
ln
oraz
t
m
m
0
r
r
µ
−
=
.
R-nie ruchu rakiety:
t
g
t
m
m
ln
u
)
t
(
v
0
r
0
r
r
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
µ
µµ
µ
−−−−
⋅⋅⋅⋅
====
.
Przeanalizujmy to r-nie (warunki brzegowe):
dla t=0
0
0
g
m
m
ln
u
)
0
t
(
v
0
r
0
r
r
====
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
====
====
(
0
1
ln
a
a
ln
=
=
)
dla t ↑
t
g
t
m
m
ln
u
)
t
(
v
0
r
0
r
r
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
µ
µµ
µ
−−−−
⋅⋅⋅⋅
====
1 składnik - r-nie typu:
−
=
x
1
1
ln
y
2 składnik - r-nie liniowe:
x
a
y
⋅
=
RAZEM:
x
a
x
1
1
ln
y
⋅
−
−
=
318
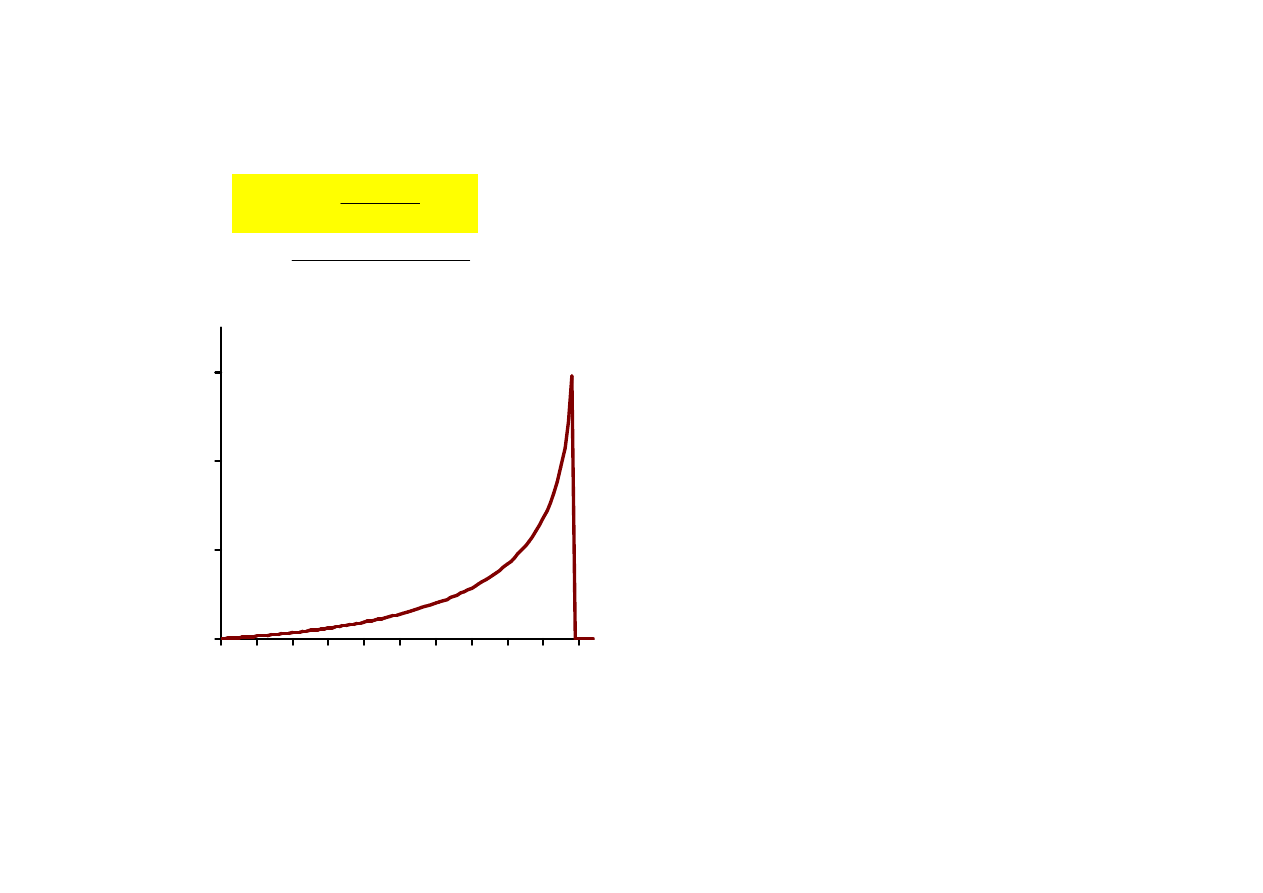
Przykład
Obl.
prędkość
rakiety
o
masie
początkowej
m
r0
=15 000 kg
, gdy szybkość spalania paliwa wynosi
µ=150 kg·s
-1
, a prędkość wyrzucania gazów względem
rakiety jest równa
u=1500 m·s
-1
.
t
g
t
m
m
ln
u
)
t
(
v
0
r
0
r
r
⋅⋅⋅⋅
−−−−
⋅⋅⋅⋅
µ
µµ
µ
−−−−
⋅⋅⋅⋅
====
t
s
m
81
,
9
t
s
kg
150
kg
15000
kg
15000
ln
s
m
1500
)
t
(
v
2
1
1
r
⋅
⋅
−
⋅
⋅
−
⋅
⋅
=
−
−
−
0
2000
4000
6000
1
21
41
61
81
101
t [s]
v
r(
t)
[
m
/s
]
319
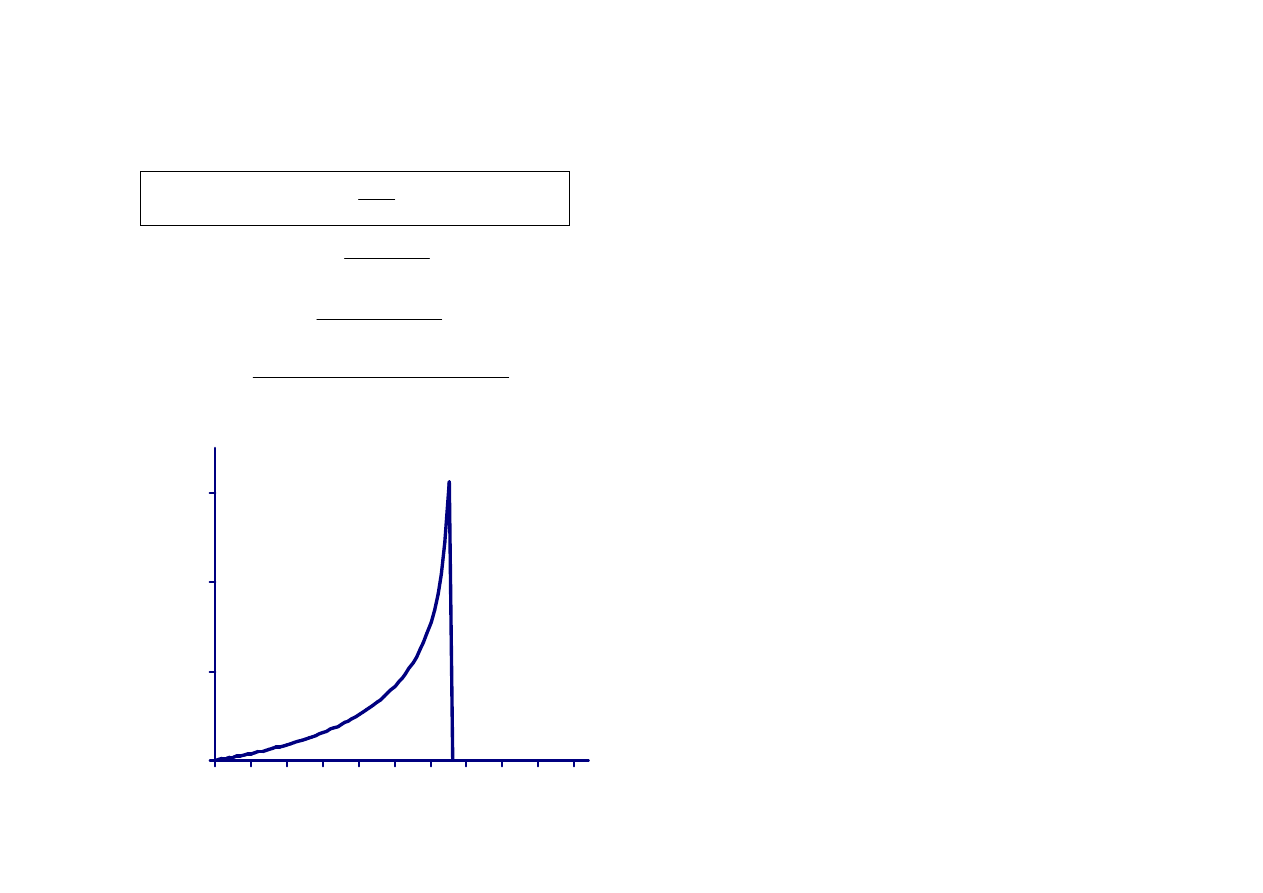
CZY TO JEST POPRAWNE?
Przecież rakieta musi posiadać swoją masę własną, np.:
m
rw
=5000 kg
powinno być:
t
m
m
t
dt
dm
m
m
)
t
(
m
m
rw
0
r
r
rw
0
r
r
r
⋅
µ
−
−
=
⋅
−
−
=
=
t
g
m
m
m
ln
u
)
t
(
v
rw
0
r
r
r
⋅
−
−
⋅
−
=
t
g
t
m
m
m
m
ln
u
)
t
(
v
rw
0
r
rw
0
r
r
⋅
−
⋅
µ
−
−
−
⋅
=
t
s
m
81
,
9
t
s
kg
150
kg
5000
kg
15000
kg
5000
kg
15000
ln
s
m
150
)
t
(
v
2
1
1
r
⋅
⋅
−
⋅
⋅
−
−
−
⋅
⋅
=
−
−
−
0
2000
4000
6000
1
21
41
61
81
101
t [s]
v
r(
t)
[
m
/s
]
Wyszukiwarka
Podobne podstrony:
6 Środek masy
Środek masy, Biomechanika i Robotyka
Środek masy
13 Środek masy
Środek masy, WÓZKI WIDŁOWE WIADOMOŚCI TESTY 2009 NA EGZAMIN, DOKUMENTY UDT
środek masy, PWR, MiBM WME, Mechanika, ściągi mech
Podstawy teoretyczne środek masy momenty bezwładności
ŚRODEK MASY, Studia, Mibm, semestr II, Mechanika, LABORY!!
srodek ciezkosci i srodek masy
6 Środek masy
Środek masy, Biomechanika i Robotyka
Środek masy
Mechanika Techniczna I Skrypt 1 4 1 Środek cieżkości i środek masy
Rozkład nacisków na osie i środek masy
więcej podobnych podstron