Politechnika Poznanska
Wydział Budownictwa, Architektury i In
ż
ynierii
Ś
rodowiska
Konstrukcje Budowlane i In
ż
ynierskie, grupa 3
Projekt z Mechaniki Budowli
Projekt 1 - Rama przestrzenna
Prowadz
ą
cy
ć
wiczenia i konsultacje:
Dr in
ż
. Przemysław Litewka
Projekt wykonał:
Krystian Paczkowski
1
6kN/m
10kN
5kN
c
c
a
a
b
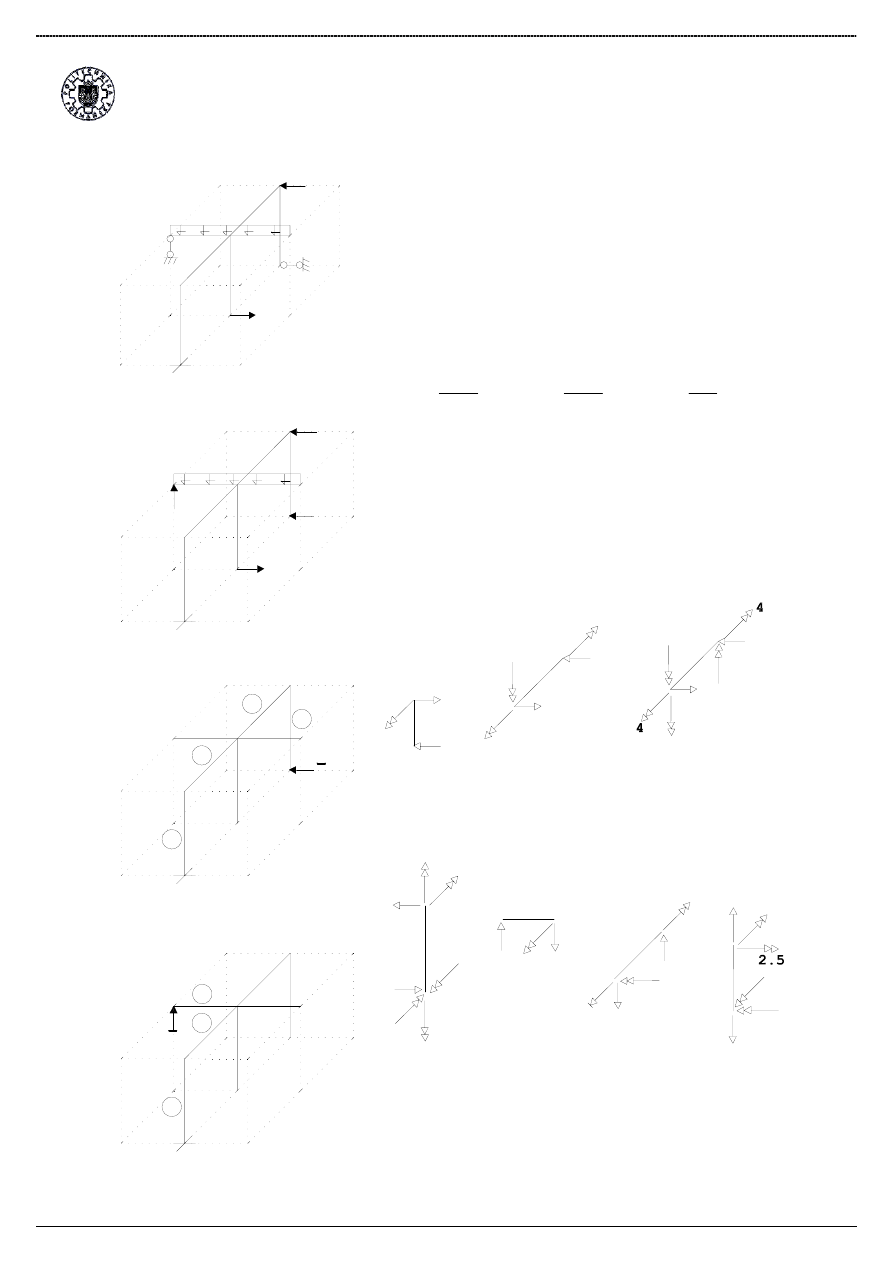
Układ podstawowy
6kN/m
10kN
5kN
c
c
a
a
b
X2
X1
Stan X1:
c
c
a
a
1
1
2
3
4
Stan X2:
c
c
a
a
1
1
2
3
Zadany przykład:
Dla przedstawionej ramy wyznaczy
ć
wykresy sił
wewn
ę
trznych wywołanych zadanym obci
ąż
eniem.
Przyj
ę
to,
ż
e rama składa si
ę
z pr
ę
tów stalowych o
przekroju kołowym (G=0.375E, I
s
=2I).
a=2,5 [m] b=4 [m] c=3 [m] SSN=2
Do oblicze
ń
poszczególnych współczynników
δ
ik
korzystam z
wzoru:
1
n
j
z
M
ix
M
kx
EI
x
⌠
⌡
d
∑
=
1
n
j
z
M
iy
M
ky
EI
y
⌠
⌡
d
∑
=
+
1
n
j
z
M
i
M
k
GI
s
⌠
⌡
d
∑
=
+
gdzie I
x
=I
y
=I ; GI
s
=0.375E * 2I= 0.75EI
Dobór układu podstawowego:
Równania kanoniczne:
δ
11
X
1
δ
12
X
2
+
δ
1P
+
0
:=
δ
21
X
1
δ
22
X
2
+
δ
2P
+
0
:=
Wyznaczenie warto
ś
ci momentów zginaj
ą
cych i skr
ę
caj
ą
cych
dla stanu X1:
1
1
4
1
1
4
4
2,5
1
1
2,5
2,5
2,5
Wyznaczenie warto
ś
ci momentów
zginaj
ą
cych i skr
ę
caj
ą
cych dla stanu X2:
Pr
ę
t 4: Pr
ę
t nr1: Pr
ę
t nr2: Pr
ę
t nr3:
4
4
4
1
1
5
5
1
1
3
1
4
3
1
2.5
3
1
1
2.5
3
Politechnika Poznanska
Wydział Budownictwa, Architektury i In
ż
ynierii
Ś
rodowiska
Konstrukcje Budowlane i In
ż
ynierskie, grupa 3
Projekt z Mechaniki Budowli
Projekt 1 - Rama przestrzenna
Prowadz
ą
cy
ć
wiczenia i konsultacje:
Dr in
ż
. Przemysław Litewka
Projekt wykonał:
Krystian Paczkowski
2
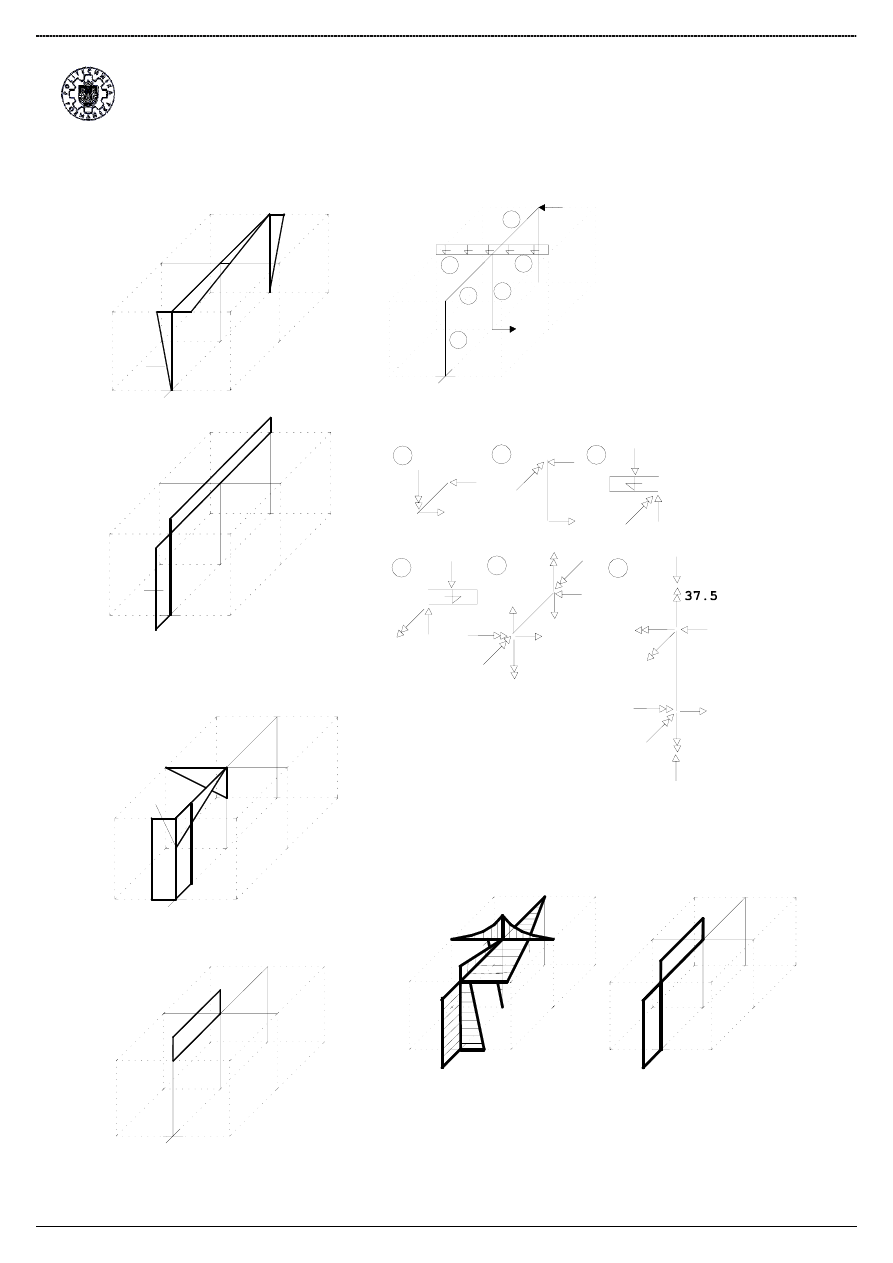
Wykresy dla stanu X1:
Momentów zginaj
ą
cych [m]:
4
4
2.5
5
Momentów skr
ę
caj
ą
cych [m]:
4
5
+
+
Wykresy dla stanu X2:
Momentów zginaj
ą
cych [m]:
3
3
2.5
2.5
Momentów skr
ę
caj
ą
cych [m]:
3
+
Stan P:
5kN
6kN/m
10kN
1
2
3
4
5
6
Wyznaczenie warto
ś
ci momentów zginaj
ą
cych i skr
ę
caj
ą
cych
dla stanu P:
1
10
25
10
2
5
20
5
3
18
6
18
27
4
18
18
27
6
5
5
20
20
36
36
5
25
37.5
6
36
20
90
36
40
90
37.5
5
90
5
Wykresy dla stanu P:
Momentów zginaj
ą
cych [kNm]: Momentów skr
ę
caj
ą
cych [kNm]:
90
90
90
20
27
25
20
20
-
40
37.5
+
37.5
Politechnika Poznanska
Wydział Budownictwa, Architektury i In
ż
ynierii
Ś
rodowiska
Konstrukcje Budowlane i In
ż
ynierskie, grupa 3
Projekt z Mechaniki Budowli
Projekt 1 - Rama przestrzenna
Prowadz
ą
cy
ć
wiczenia i konsultacje:
Dr in
ż
. Przemysław Litewka
Projekt wykonał:
Krystian Paczkowski
3
Obliczenia współczynników
:
EJ
δ
11
1
2
4
⋅
4
⋅
2
3
⋅
4
⋅
1
2
5
⋅
5
⋅
2
3
⋅
5
⋅
+
1
2
4
⋅
4
⋅
2
3
⋅
4
⋅
+
1
0.75
5
4
⋅
5
⋅
4
5
⋅
4
⋅
+
(
)
⋅
+
:=
EJ
δ
11
324.333
:=
EJ
δ
12
1
2
4
⋅
4
⋅
3
⋅
1
0.75
4
2.5
⋅
3
⋅
(
)
⋅
+
:=
EJ
δ
12
64
:=
EJ
δ
22
1
2
3
⋅
3
⋅
2
3
⋅
3
⋅
1
2
2.5
⋅
2.5
⋅
2
3
⋅
2.5
⋅
+
3
4
⋅
3
⋅
+
2.5
4
⋅
2.5
⋅
+
1
0.75
3
2.5
⋅
3
⋅
(
)
⋅
+
:=
EJ
δ
22
105.208
:=
EJ
δ
1P
1
2
20
4
⋅
2
−
3
4
⋅
1
2
40
4
⋅
1
−
3
4
⋅
+
1
2
25
2.5
⋅
2
3
2.5
1
3
5
+
+
1
2
37.5
2.5
⋅
2
3
5
1
3
2.5
+
+
1
2
2.5
25
⋅
2
3
2.5
⋅
+
:=
P
1
0.75
37.5
4
⋅
5
⋅
20
2.5
⋅
4
⋅
−
(
)
EJ
δ
1P
871.56249999999999999
:=
P
EJ
δ
2 P
⋅
1
2
20
40
+
(
)
⋅
4
⋅
3
−
(
)
⋅
90
4
⋅
2.5
−
⋅
+
1
2
2.5
⋅
90
⋅
2
−
3
2.5
⋅
⋅
+
1
2
27
⋅
3
⋅
2
−
3
3
⋅
⋅
+
2
3
6
3
2
⋅
8
⋅
3
⋅
1.5
⋅
+
1
0.75
20
−
2.5
⋅
3
⋅
(
)
+
:=
P
EJ
δ
2P
1708.2500000000000000
−
:=
P
Z czego wynika:
324.333
X
1
⋅
64
X
2
⋅
+
871.5625
−
:=
64
X
1
⋅
105.208
X
2
⋅
+
1708.25
:=
Z czego otrzymujemy:
X
1
6.69482
−
:=
X
2
20.3095
:=
[kN]
Korzystaj
ą
c z zasady superpozycji otrzymuj
ę
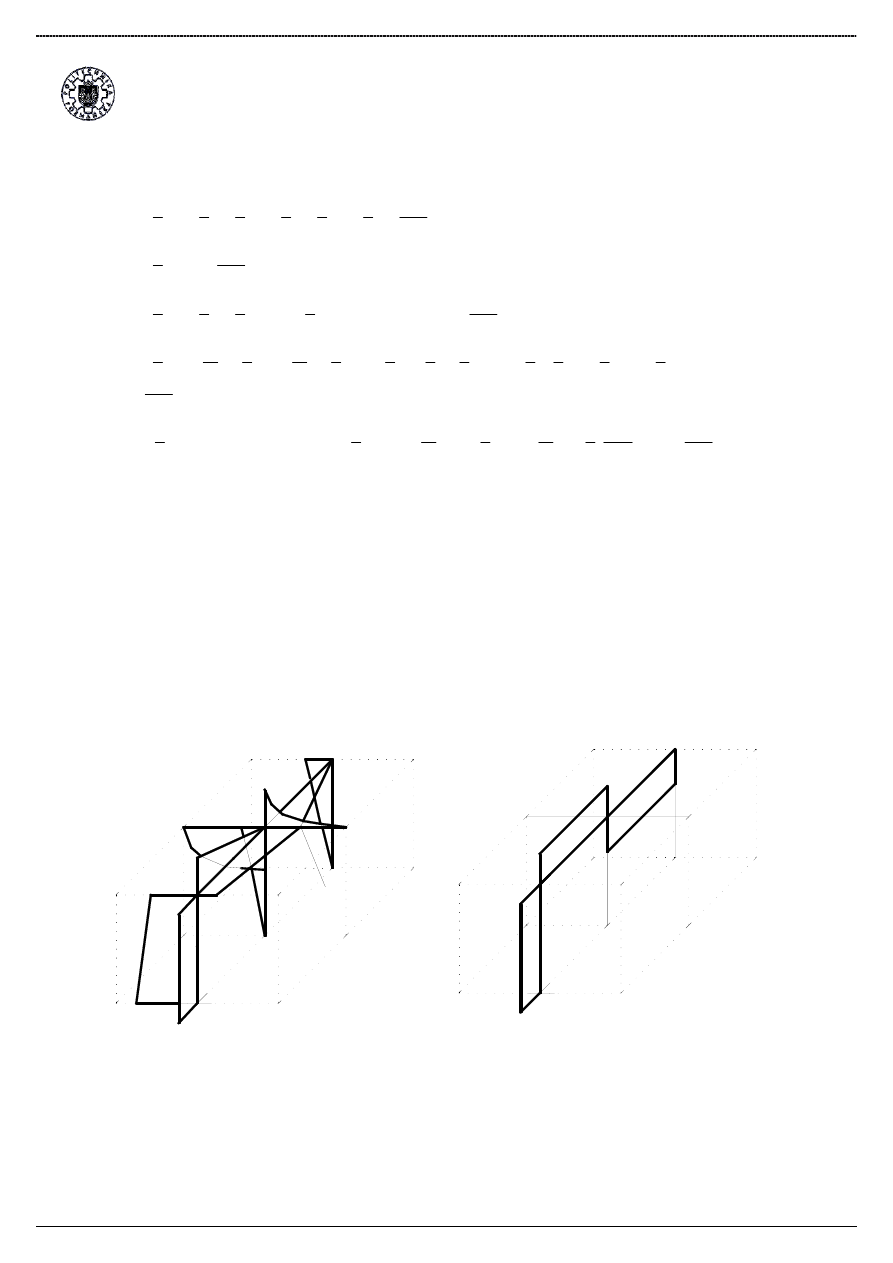
wykresy momentów rzeczywistych:
S
n
S
p
S
1
X
1
⋅
+
S
2
X
2
⋅
+
:=
Wykres momentów zginaj
ą
cych: Wykres momentów skr
ę
caj
ą
cych:
M[kNm]
[kNm]
20
33.929
20.929
14.149
26.779
27
+
+
-
4.0259
26.779
14.149
8.26295
4.0259
39.226
39.226
δ
ik
Politechnika Poznanska
Wydział Budownictwa, Architektury i In
ż
ynierii
Ś
rodowiska
Konstrukcje Budowlane i In
ż
ynierskie, grupa 3
Projekt z Mechaniki Budowli
Projekt 1 - Rama przestrzenna
Prowadz
ą
cy
ć
wiczenia i konsultacje:
Dr in
ż
. Przemysław Litewka
Projekt wykonał:
Krystian Paczkowski
4
Sprawdzenie kinematyczne:
Przyjmuje jako układ wirtualny,układ X1,przykładaj
ą
c w miejscu siły X1 sił
ę
wirtualn
ą
równ
ą
1.
1
δ
⋅
1
2
14.149
⋅
4
⋅
2
3
⋅
4
⋅
1
2
20.929
⋅
4
⋅
1
3
⋅
4
⋅
+
1
2
4.0259
⋅
2.5
⋅
2
3
5
⋅
1
3
2.5
⋅
+
⋅
+
1
2
8.26295
⋅
2.5
⋅
2.5
2
3
⋅
1
3
5
⋅
+
⋅
+
:=
1
δ
⋅
1
2
2.5
⋅
8.26295
⋅
2
3
⋅
2.5
⋅
1
2
26.779
⋅
4
⋅
2
−
3
4
⋅
⋅
+
1
0.75
4.0259
4
⋅
5
⋅
14.149
2.5
⋅
4
⋅
+
26.779
2.5
⋅
4
⋅
−
(
)
⋅
+
1
δ
⋅
1.9666666666666665
10
-2
⋅
EJ
:=
[m] Wynik jest bliski zeru zatem obliczenia uznaj
ę
za poprawne.
Bł
ą
d procentowy wynosi:
1
δ
⋅
61.06233333333333333
61.042666666666666665
−
+
:=
1.9666666666666665
10
-2
⋅
61.06233333333333333
3.221
10
4
−
×
=
Bł
ą
d jest < 0,1% zatem zakładam,
ż
e kontrola jest poprawna.
Kontrolne sprawdzenie dla drugiego układu wirtualnego, przyjmuj
ę
w miejscu siły X2 sił
ę
wirtualn
ą
równ
ą
1.
1
δ
⋅
1
2
3
⋅
33.929
⋅
2
3
⋅
3
⋅
2
3
6
3
2
⋅
8
⋅
3
⋅
1.5
⋅
+
1
2
2.5
⋅
39.226
⋅
2
3
⋅
2.5
−
(
)
⋅
+
39.226
4
⋅
2.5
−
(
)
⋅
+
:=
1
δ
⋅
1
2
14.149
20.929
+
(
)
⋅
4
⋅
3
⋅
1
0.75
14.149
2.5
⋅
3
⋅
(
)
⋅
+
1
δ
⋅
1.416666666666667
10
-2
⋅
EJ
:=
EJ
[m] Wynik jest bliski zeru, co jest potwierdzeniem poprawno
ś
ci
oblicze
ń
.
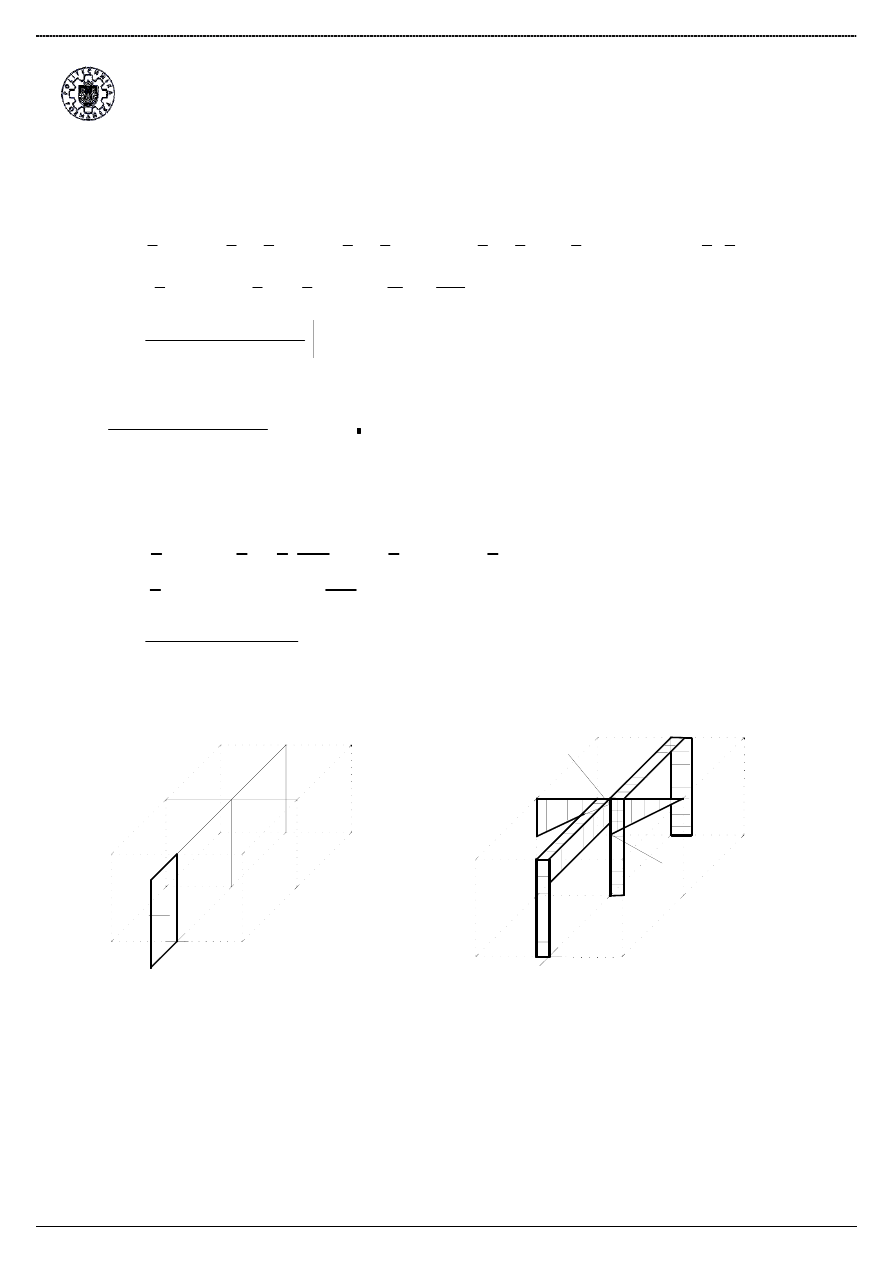
Wykres sil Normalnych wyst
ę
puj
ą
cych w ramie: Wykres sil Tn
ą
cych wyst
ę
puj
ą
cych w ramie:
-
15.6905
2.31
20.31
1.695
15.69
5
6.695
3.305
18
1.695
-
-
-
-
-
-
+
N[kN]
T[kN]
Wyszukiwarka
Podobne podstrony:
Mechanika Budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil (rama przestrzenna)
Metoda sił rama temp montaz
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil rama
Mechanika budowli Metoda sił rama
Projekt I Rama Metoda Sił
Metoda sił, projekt-rama
OBLICZANIE RAMY PRZESTRZENNEJ METODĄ SIŁ
Rama metoda sił spr
Rama metoda sił
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
więcej podobnych podstron