
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
1
POLITECHNIKA POZNAŃSKA
INSTYTUT KONSTRUKCJI BUDOWLANYCH
ZAKŁAD MECHANIKI BUDOWLI
ĆWICZENIE NR 1
OBLICZANIE RAMY PRZESTRZENNEJ METODĄ SIŁ
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
2
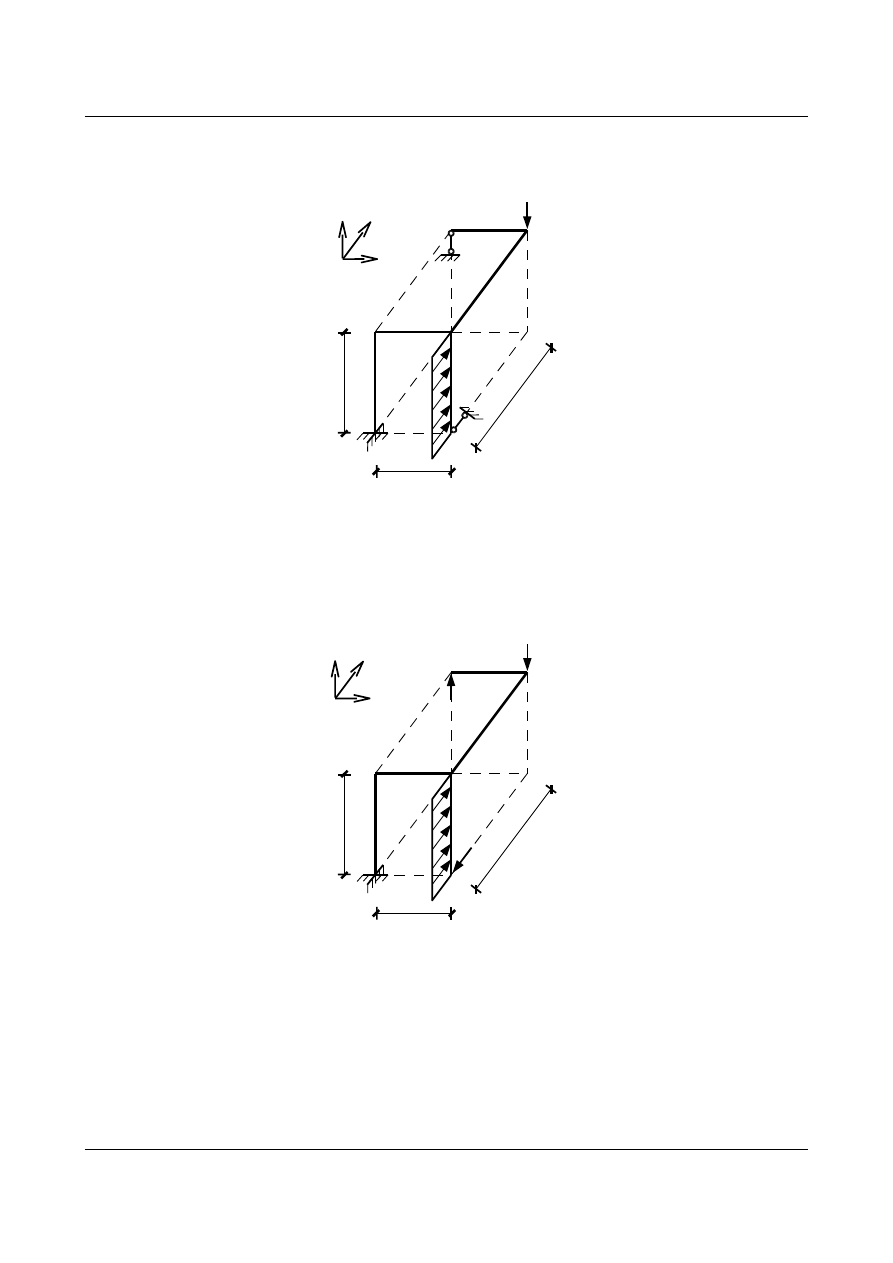
Dla ramy przestrzennej wyznaczyć wykresy sił wewnętrznych wywołanych zadanym obciążeniem.
Przyjąć, że rama składa się z prętów stalowych o przekroju kołowym (G=0,375E, J
s
=2J).
10 kN
5 kN/m
4,0
3,0
5,0
[m]
x
y
z
Układ jest statycznie niewyznaczalny dlatego określamy stopień statycznej niewyznaczalności i dobieramy
układ podstawowy.
SSN = 2
W celu rozwiązania zadania metodą sił przyjmujemy układ podstawowy
10 kN
5 kN/m
4,0
3,0
5,0
[m]
X
2
X
1
A
B
x
y
z
który musi spełniać warunki kinematycznej zgodności z układem wyjściowym. Oznacza to, że
przemieszczenie punktu A po kierunku osi y oraz przemieszczenie punktu B po kierunku osi z muszą być
równe zero.
A
y
=0
B
z
=0
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
3
Na powyższe przemieszczenia wpływ mają nadliczbowe siły X
i
oraz obciążenie zewnętrzne. Równania
kanoniczne przyjmą zatem postać:
A
y
=
11
⋅X
1
12
⋅X
2
1 P
=0
B
z
=
21
⋅X
1
22
⋅X
2
2 P
=0
Przemieszczenia w ramie przestrzennej obliczamy pomijając wpływ sił normalnych i tnących:
1 ⋅
ik
=
∑∫
M
i
y
M
k
y
EJ
y
dx
∑∫
M
i
z
M
k
z
EJ
z
dx
∑∫
M
i
s
M
k
s
GJ
s
dx
gdzie:
M
i
y
,
M
k
y
,
M
i
z
,
M
k
z
- momenty zginające liczone odpowiednio względem osi y i z,
M
i
s
,
M
k
s
- momenty skręcające liczone względem osi pręta,
J
s
- biegunowy moment bezwładności.
Ponieważ przekrój pręta jest kołowy to J
y
= J
z
=J. Podstawiając dane G i J
s
otrzymamy:
1 ⋅
ik
=
∑∫
M
i
y
M
k
y
EJ
dx
∑∫
M
i
z
M
k
z
EJ
dx
∑∫
M
i
s
M
k
s
0,75 EJ
dx
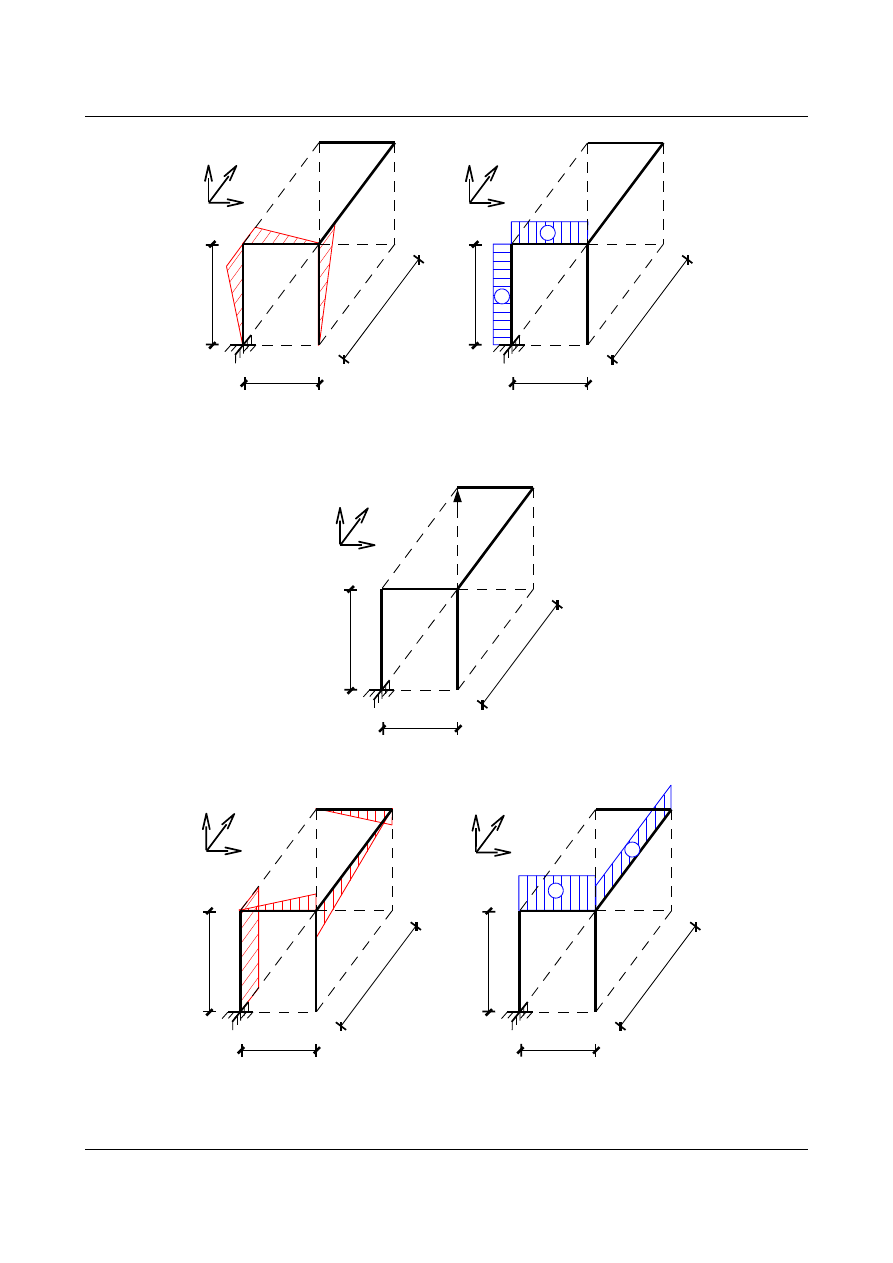
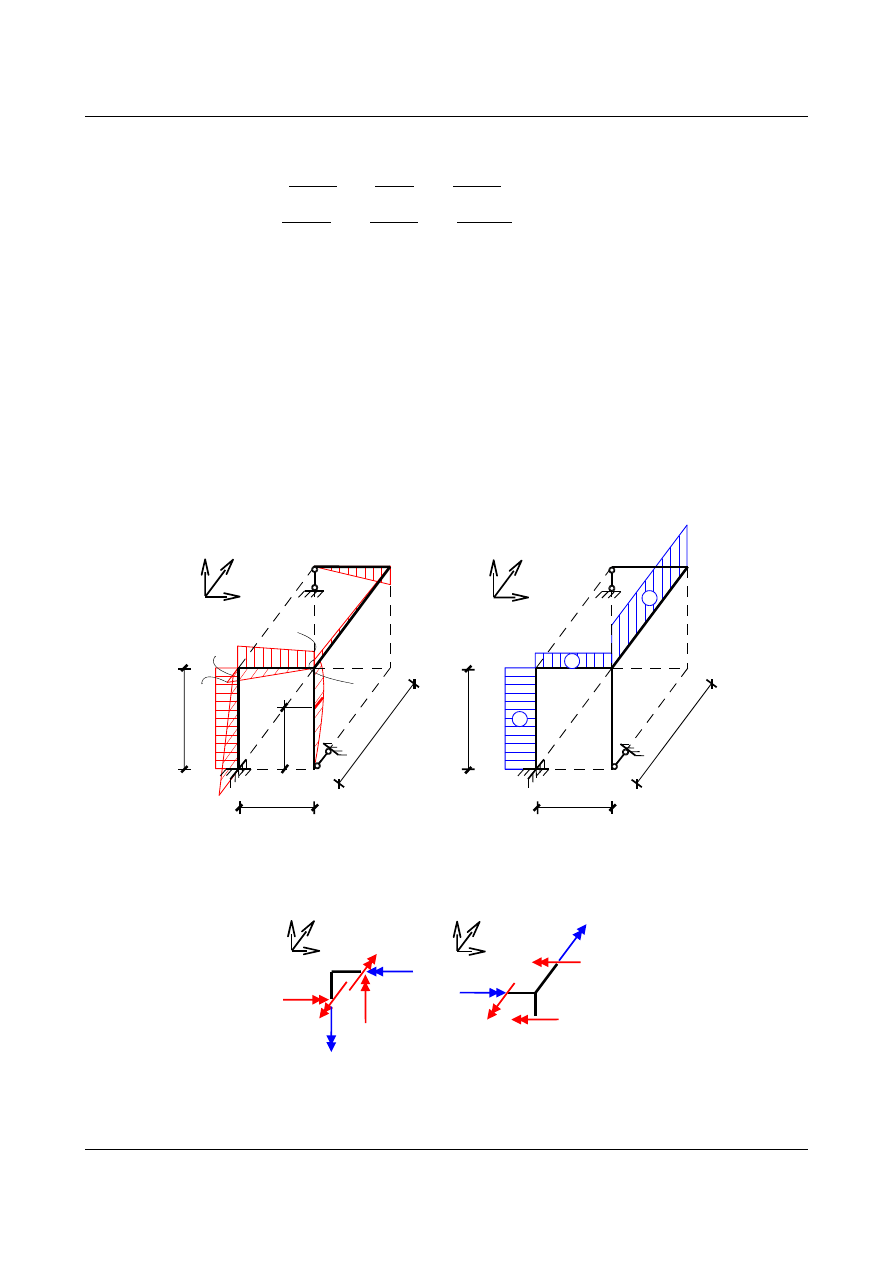
Kolejnym etapem jest wyznaczenie wartości momentów zginających i skręcających od sił
jednostkowych, przyłożonych kolejno w miejsca niewiadomych X
1
i X
2
, oraz od obciążenia zewnętrznego.
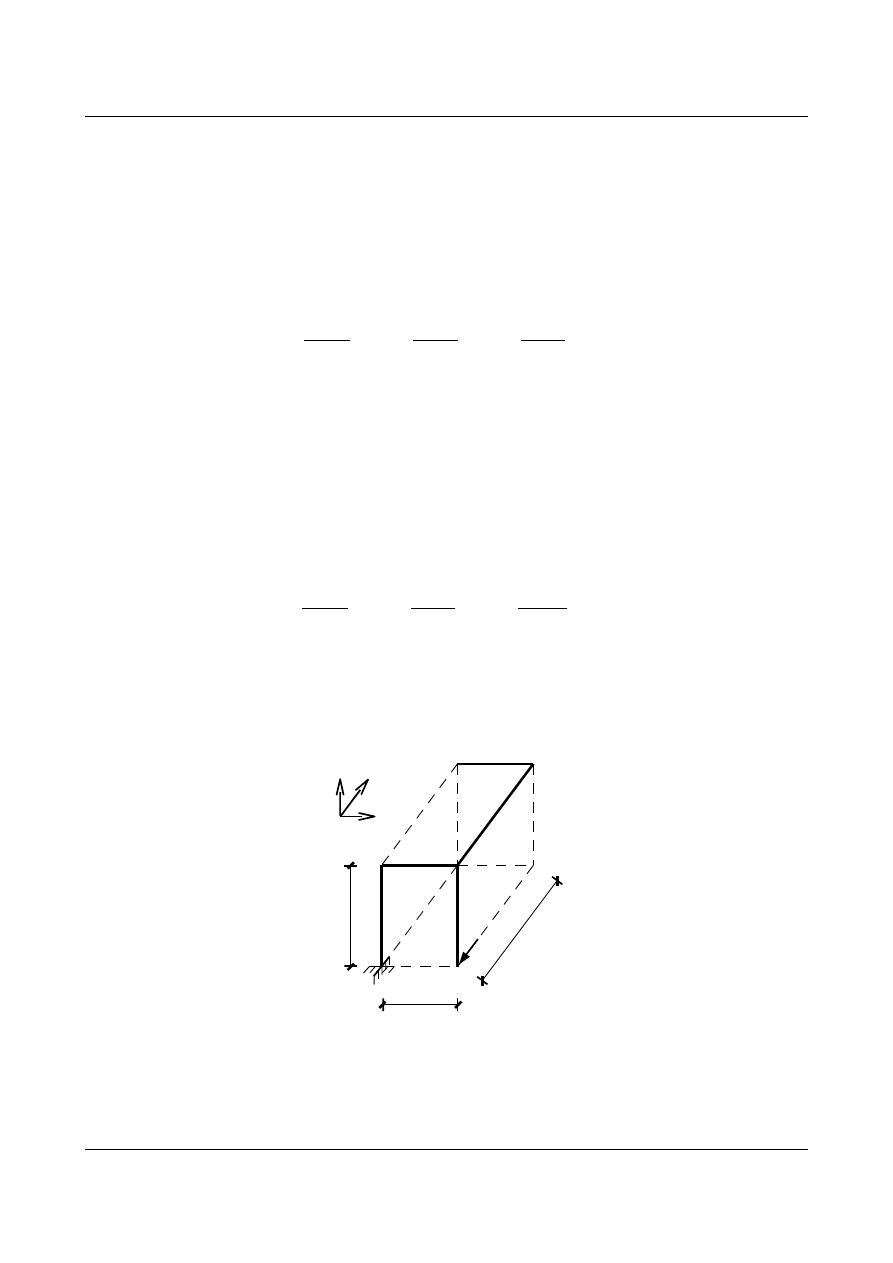
•
Stan od obciążenia X
1
= 1
4,0
3,0
5,0
[m]
X
1
=1
x
y
z
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
4
4,0
3,0
5,0
[m]
4,0
3,0
5,0
[m]
x
x
y
y
z
z
M
1
[m]
M
s
1
[m]
4
4
3
_
-4
_
-3
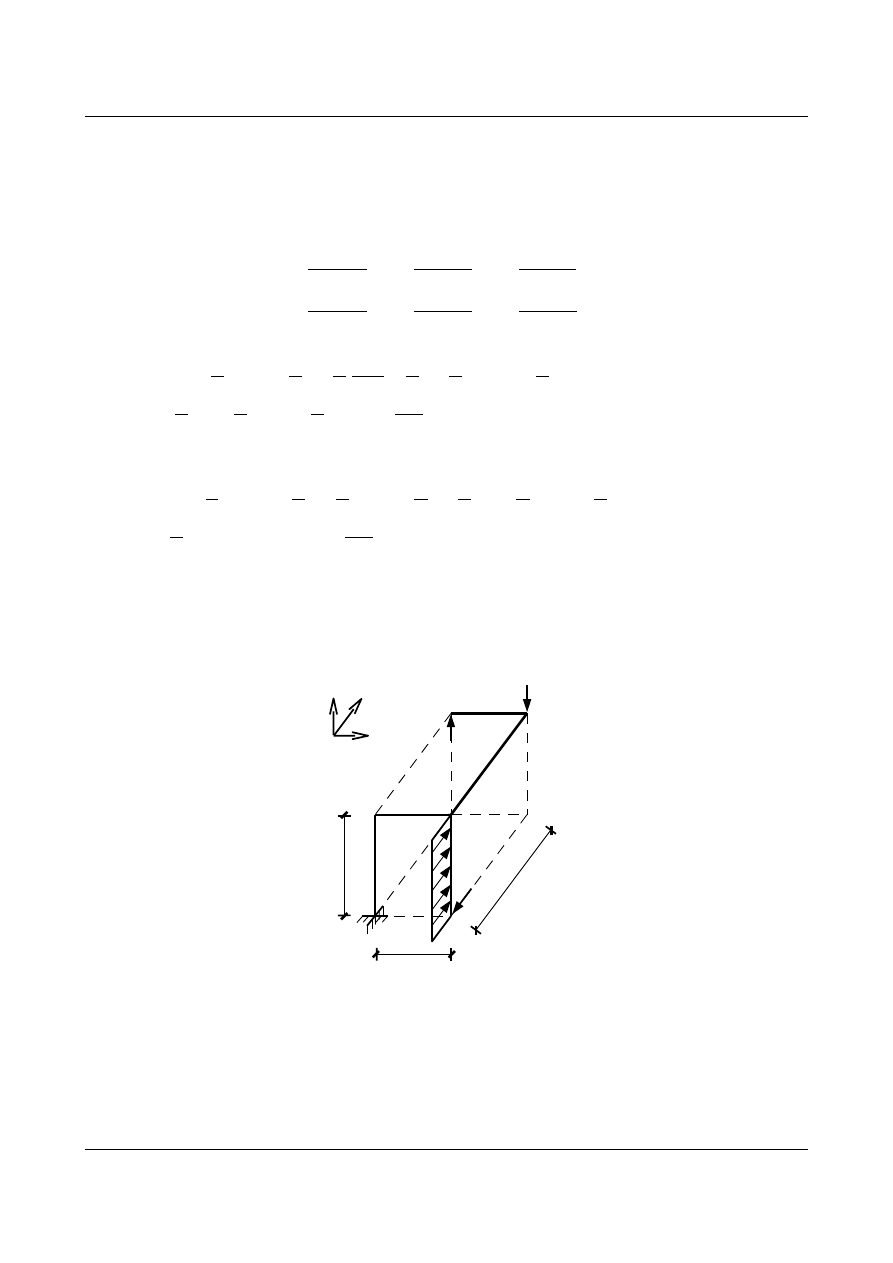
•
Stan od obciążenia X
2
= 1
4,0
3,0
5,0
[m]
x
y
z
X
2
=1
4,0
3,0
5,0
[m]
4,0
3,0
5,0
[m]
x
x
y
y
z
z
M
2
[m]
M
s
2
[m]
5
3
3
5
+
3
5
+
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
5
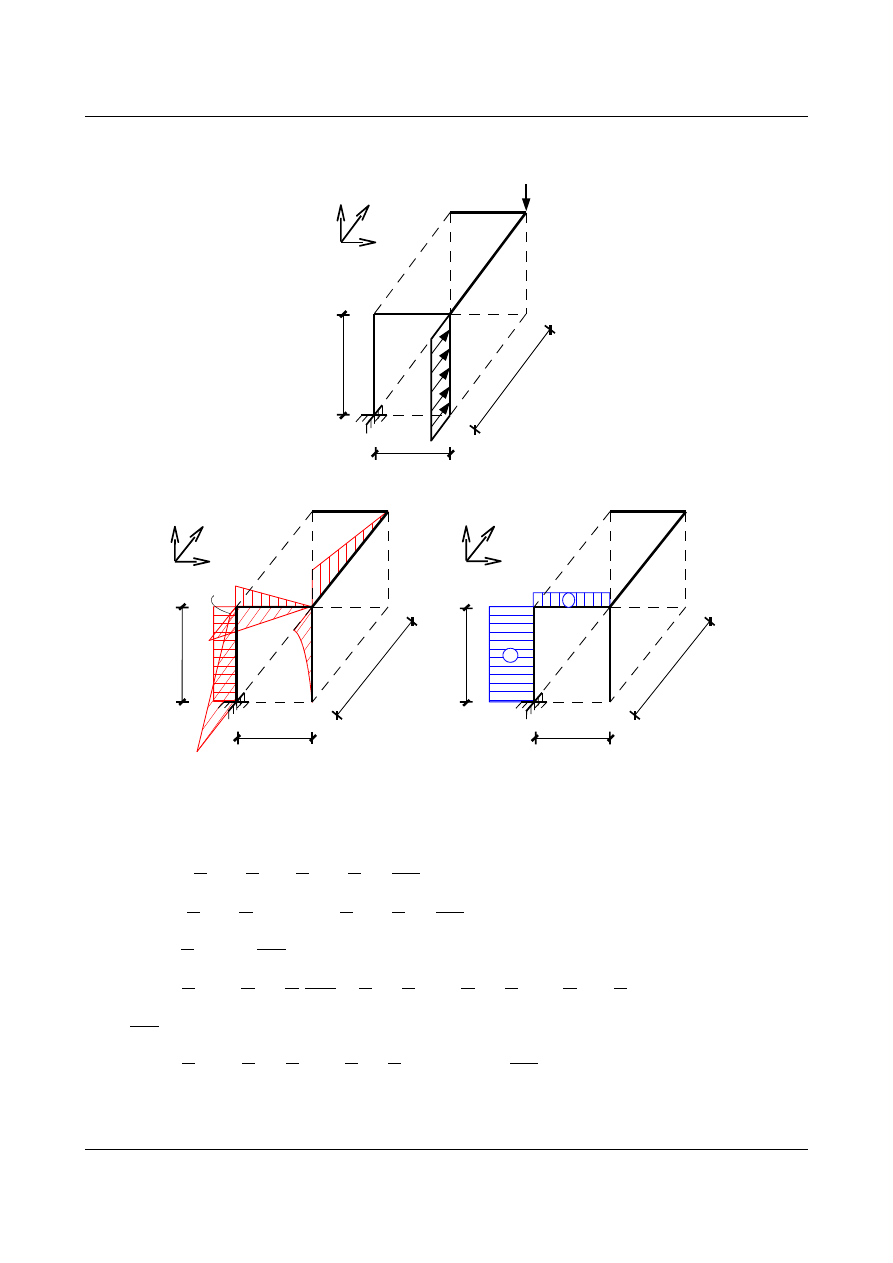
•
Stan od obciążenia P
10 kN
5 kN/m
4,0
3,0
5,0
[m]
x
y
z
4,0
3,0
5,0
[m]
4,0
3,0
5,0
[m]
x
x
y
y
z
z
M
0
P
[kNm]
M
s0
P
[kNm]
60
40
50
30
+
60
-10
_
30
90
10
Obliczamy potrzebne w równaniach kanonicznych przemieszczeniach korzystając z metody Wereszczagina
– Mohra:
EJ
11
=2 ⋅
1
2
⋅4 ⋅4 ⋅
2
3
⋅4
1
2
⋅3 ⋅3 ⋅
2
3
⋅3
1
0,75
⋅
[
−4 ⋅3 ⋅−4−3⋅4 ⋅−3
]
=163,6
EJ
22
=2 ⋅
1
2
⋅3 ⋅3 ⋅
2
3
⋅3 4 ⋅5 ⋅5
1
2
⋅5 ⋅5 ⋅
2
3
⋅5
1
0,75
⋅
[
5 ⋅3 ⋅5 3 ⋅5 ⋅3
]
=319,6
EJ
12
=−1
2
⋅4 ⋅4 ⋅5
1
0,75
⋅−4⋅3 ⋅5 =−120,0
EJ
1 P
=−1
2
⋅40 ⋅4 ⋅
2
3
⋅4
2
3
⋅5
⋅4
2
8
⋅4 ⋅
1
2
⋅4 −
1
2
⋅60 ⋅3 ⋅
2
3
⋅3
1
2
⋅4 ⋅4 ⋅
2
3
⋅10
1
3
⋅90
1
0,75
⋅[−4 ⋅3 ⋅−10−3 ⋅4 ⋅60]=−846,6
EJ
2 P
=−1
2
⋅50 ⋅5 ⋅
2
3
⋅5
1
2
⋅30 ⋅3 ⋅
1
3
⋅3 −
1
2
⋅10 90⋅4 ⋅5
1
0,75
⋅−10⋅3 ⋅5 =−1571,6
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
6
Układ równań kanonicznych przyjmuje postać:
{
163,6
EJ
⋅X
1
− 120,0
EJ
⋅X
2
− 846,
6
EJ
=0
−120,0
EJ
⋅X
1
319,
6
EJ
⋅X
2
− 1571,
6
EJ
=0
Z rozwiązania powyższego układu otrzymano następujące wyniki:
{
X
1
=12,111 [kN ]
X
2
=9,463 [kN ]
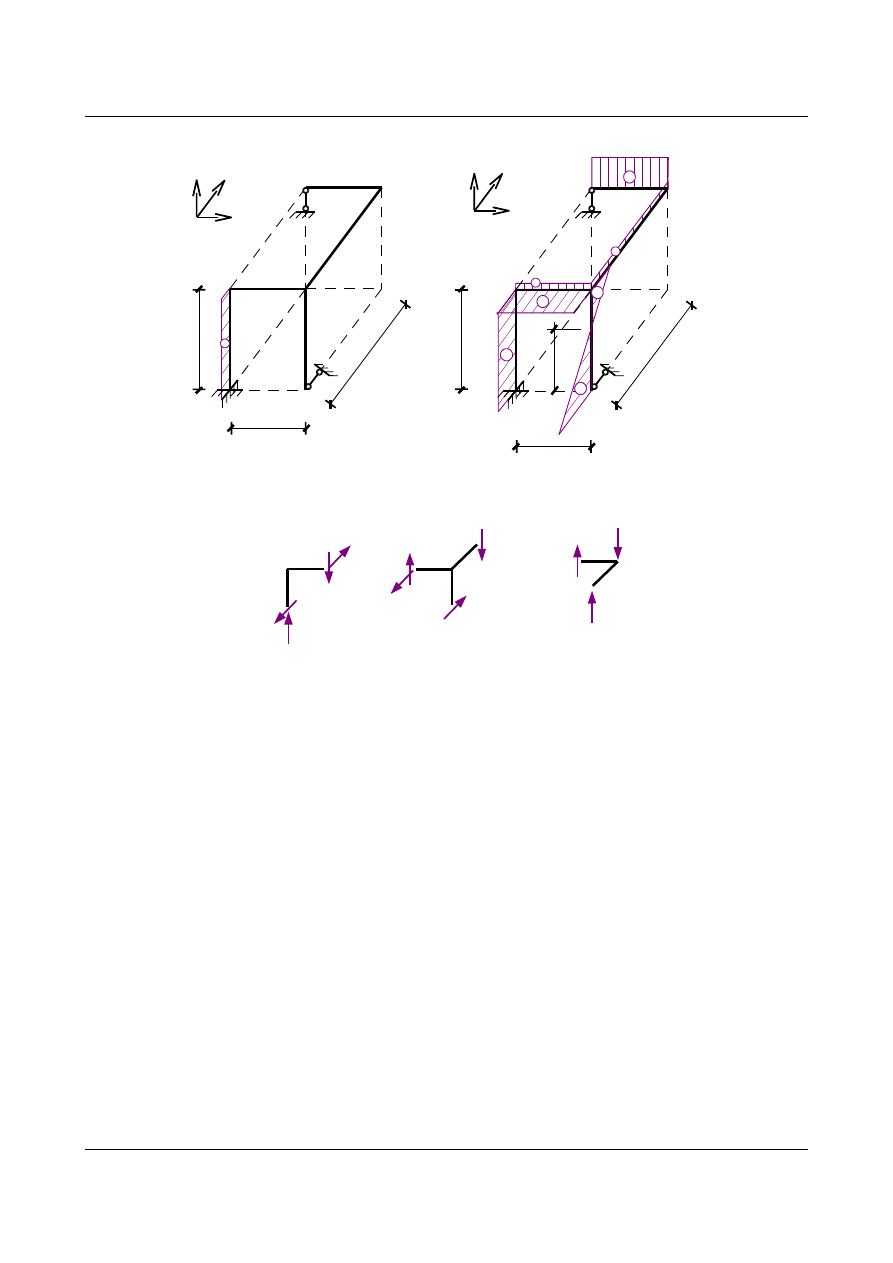
Wartości momentów zginających i skręcających w układzie niewyznaczalnym otrzymamy korzystając z
zasady superpozycji:
M
n
=M
P
0
M
1
⋅X
1
M
2
⋅X
2
M
sn
=M
s
P
0
M
1
s
⋅X
1
M
2
s
⋅X
2
4,0
3,0
5,0
[m]
4,0
3,0
5,0
[m]
x
x
y
y
z
z
M
(n)
[kNm]
M
s(n)
[kNm]
23,667
8,444
2,685
30
+
23,667
-11,129
_
30
42,685
11,129
+
28,389
28,389
28,389
14,399
2,42
•
Sprawdzenie równowagi w węzłach
x
x
y
y
z
z
23,667
30
11,129
30
11,129
8,444
2,685
28,389
28,389
11,129
23,667
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
7
•
Kontrola kinematyczna
W celu wykonania kontroli kinematycznej korzystamy z twierdzenia redukcyjnego. Do sprawdzenia przyjęto
układy podstawowe takie jak w stanach X
1
= 1 oraz X
2
= 1 z tą różnicą, że tym razem przyłożone siły
jedynkowe są siłami wirtualnymi.
1 ⋅
A
y
=
∑∫
M
1
y
M
y n
EJ
∑∫
M
1
z
M
z n
EJ
∑∫
M
1
s
M
sn
0,75 EJ
1 ⋅
B
z
=
∑∫
M
2
y
M
y n
EJ
∑∫
M
2
z
M
z n
EJ
∑∫
M
2
s
M
sn
0,75 EJ
EJ
A
y
=1
2
⋅8,444 ⋅4 ⋅
2
3
⋅4
2
3
⋅5
⋅4
2
8
⋅4 ⋅
1
2
⋅4 −
1
2
⋅3 ⋅23,667 ⋅
2
3
⋅3
1
2
⋅4 ⋅4 ⋅
2
3
⋅11,129
1
3
⋅42,685
1
0,75
⋅−4 ⋅3 ⋅−11,129−3 ⋅4 ⋅23,667=
=200,548 −200,608 =−0,060 ≈0
EJ
B
z
=1
2
⋅28,389 ⋅3 ⋅
2
3
⋅3 −
1
2
⋅2,685 ⋅5 ⋅
2
3
⋅5
1
2
⋅3 ⋅3 ⋅
2
3
⋅28,389
1
3
⋅30
−
−1
2
⋅11,129 42,685⋅4 ⋅5
1
0,75
⋅3 ⋅5 ⋅28,389 −3 ⋅5 ⋅11,129=
=−345,181345,200=0,019 ≈0
Ponieważ przy obliczeniu przemieszczeń pominięto wpływ normalnych i tnących, wykresy te w układzie
niewyznaczalnym musimy wykonać rozwiązując układ od obliczonych nadliczbowych i obciążenia
zewnętrznego.
10 kN
5 kN/m
4,0
3,0
5,0
[m]
9,463 kN
12,111 kN
x
y
z
Agnieszka Sysak Gr. 3
2004-03-16
Część 1
OBLICZANIE RAMY PRZESTRZENNEJ MATODĄ SIŁ
8
4,0
3,0
5,0
[m]
4,0
3,0
5,0
[m]
x
x
y
y
z
z
N
(n)
[kN]
T
(n)
[kN]
-0,537
-9,463
_
_
-0,537
-0,537
7,889
+
7,889
+
_
_
-7,889
_
+
12,111
2,42
•
Sprawdzenie równowagi w węzłach
7,889
7,889
7,889
7,889
0,537
0,537
0,537
0,537
0,537
9,463
10,0
Agnieszka Sysak Gr. 3
2004-03-16
Wyszukiwarka
Podobne podstrony:
Obliczanie ramy metodą przemieszczeń obliczenie momentów oraz sił tnących korzystając z równania róż
Mechanika Budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil (rama przestrzenna)
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
Obliczanie układów statycznie niewyznaczalnych metoda sił z wykorzystaniem symetrii i antysymetrii
Obliczanie układów statycznie niewyznaczalnych metoda sił z wykorzystaniem symetrii i antysymetrii
OBLICZENIE RAMY METODĄ PRZEMIESZCZEŃOD TEMPERATURY projekt43
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil luk
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil rama
Metoda sil zadania ramy, mechanika budowli
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil luk
Obliczanie ramy metodą przemieszczeń
Obliczanie układów statycznie niewyznaczalnych metodą sił
OBLICZENIE RAMY METODĄ PRZEMIESZCZEŃ OD OSIADANIA PODPÓR projekt42
Obliczenia ramy Metodą przemieszczeń temperatura projekt39
Obliczenia ramy Metodą przemieszczeń projekt38
cwicz mechanika budowli obliczanie ukladow statycznie niewyznaczalnych metoda sil krata
więcej podobnych podstron