1
6. Center of mass,
Collisions
6.1. The center of mass
To describe the motion of a system of particles (also for their
continuous distribution – a solid body), one introduces the
concept of the center of mass.
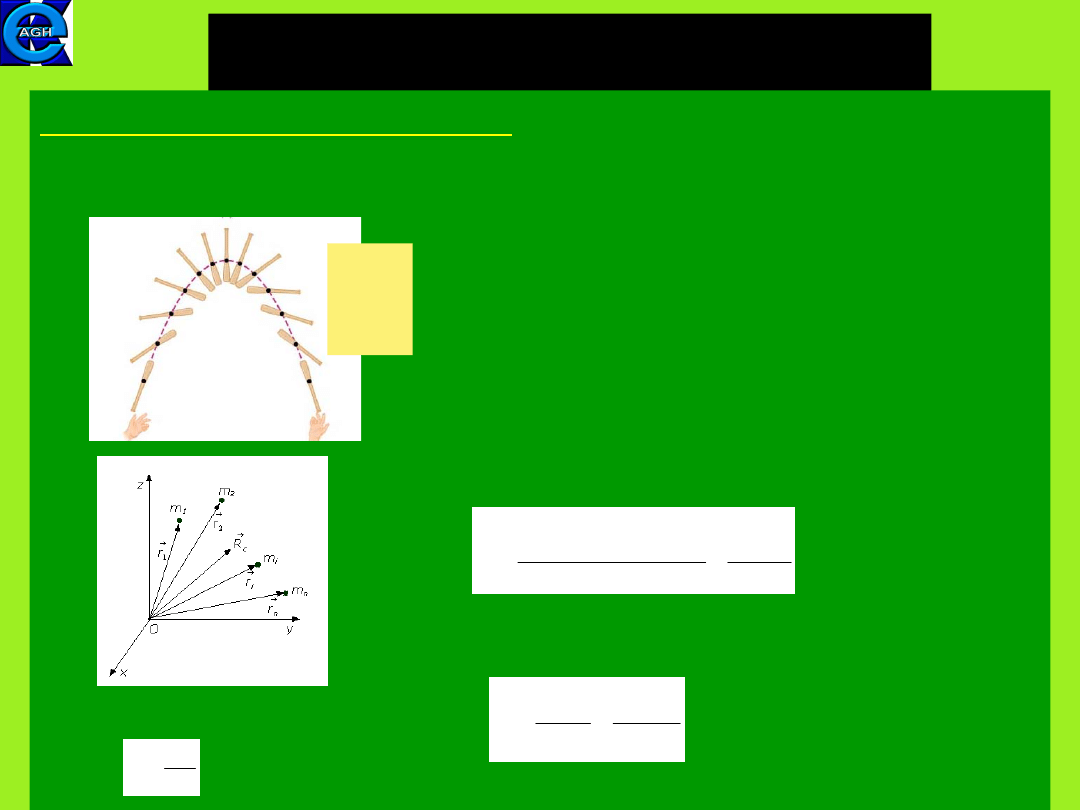
A baseball bat thrown into the air
moves in a
complicated manner but one of its
points, the
center of mass (CM), moves
in a parabolic
path.
CM moves as if all the system’s mass
were
concentrated there and all
external forces were
applied to it (to
be proved).
We define the position of CM by a vector
equation
(6.1)
For a solid body summation in Eq.(6.1)
must be
replaced by integration
(6.2)
where is a mass density.
(figur
e
from
HRW)
dV
dV
r
dm
dm
r
R
c
dV
dm
M
r
m
m
m
m
r
m
r
m
r
m
R
i
i
i
n
n
n
c
...
...
2
1
2
2
1
1
2
For a uniform body (ρ=const), position of its CM depends on the
body’s shape only
(6.3)
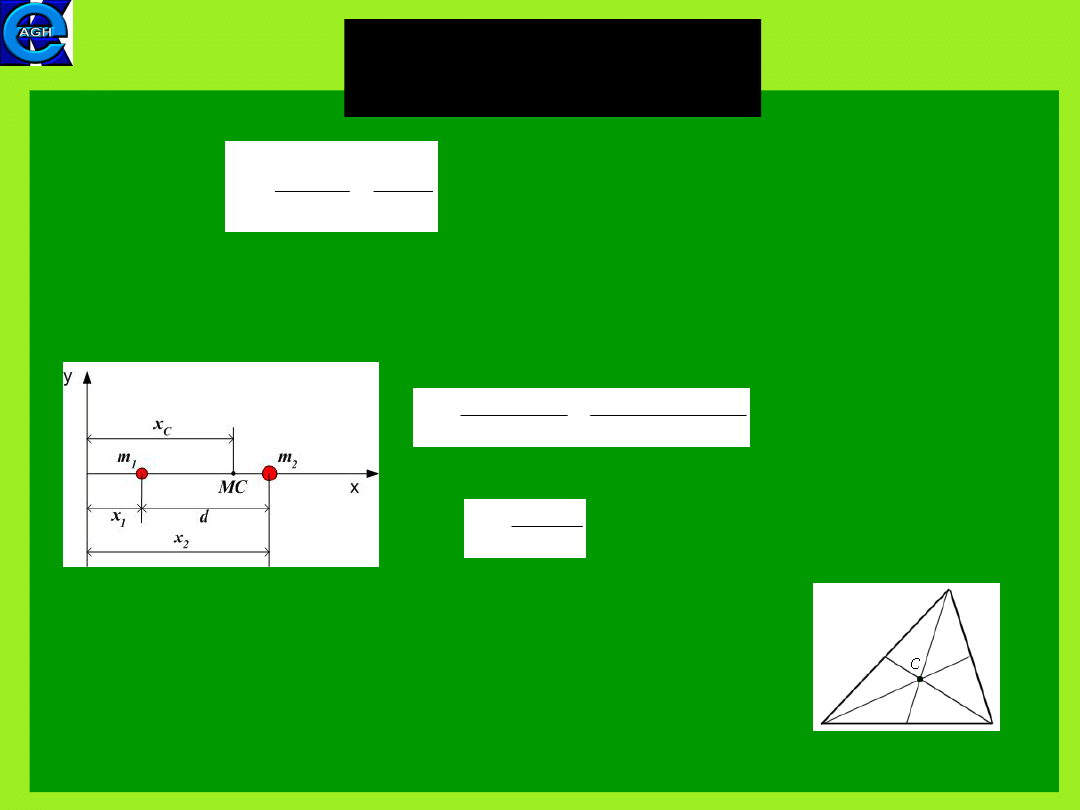
Examples
1. Two particles of masses m
1
and m
2
separated by distance d.
The position of CM we find placing both particles on an x
axis.
From Eq.(6.1) one obtains
Putting x
1
=0, we have
2. The center of mass of a triangle
.
In this case there is no need to use Eq.(6.3), but dividing
a triangle into segments it can be concluded that CM is
placed at the intersection of triangle medians.
2
1
1
2
1
1
2
1
2
2
1
1
m
m
)
d
x
(
m
x
m
m
m
x
m
x
m
x
C
dV
dV
r
dV
dV
r
R
c
2
1
2
m
m
d
m
x
C
The center of
mass, cont.
3
For a system of n particles one can write from a CM definition
(6.1)
(6.4)
Differentiating both sides of Eq.(6.4) vs. time gives
(6.5)
By differentiating Eq.(6.5) in respect to time one obtains
(6.6)
Eq.(6.6) can be rewritten as
(6.6a)
The right side of Eq.(6.6a) includes all forces, both the internal
forces between the
particles and the external forces acting from tha outside. From
the Newton’s third
law the sum of all internal forces reduces to zero and the right
side of Eq.(6.6a) is
the vector sum of all external forces, the net force. In this case
one obtains
(6.7)
This proves the statement given at the beginning of this chapter.
6.2. Motion of a system of
particles
n
n
c
r
m
...
r
m
r
m
MR
2
2
1
1
n
n
C
v
m
...
v
m
v
m
v
M
2
2
1
1
n
C
F
...
F
F
a
M
2
1
n
n
C
a
m
...
a
m
a
m
a
M
2
2
1
1
C
net
a
M
F
Neton’s second
law applied to the center of mass
4
Eq.(6.5) can be rewritten as
(6.8)
Thus, the linear momentum of a system of particles (RHS of
above equation)
is equal to the product of the total mass of the system and the
velocity of the center
of mass:
(6.9)
Calculating the time derivative of Eq.(6.9) we have
(6.10)
From above relation and taking into account Eq.(6.7) one
obtains
(6.11)
From (6.11) it follows, that if is zero, then
(6.12)
The linear momentum of the system is changed by the
net external force (Newton’s second law for a system of
particles).
n
C
p
...
p
p
v
M
2
1
P
v
M
C
C
C
a
M
dt
P
d
dt
v
d
M
dt
P
d
F
net
net
F
const
P
The momentum of a system is not changed if it is isolated
(law of momentum conservation for a system of particles).
6.3. Momentum of a system of
particles
5
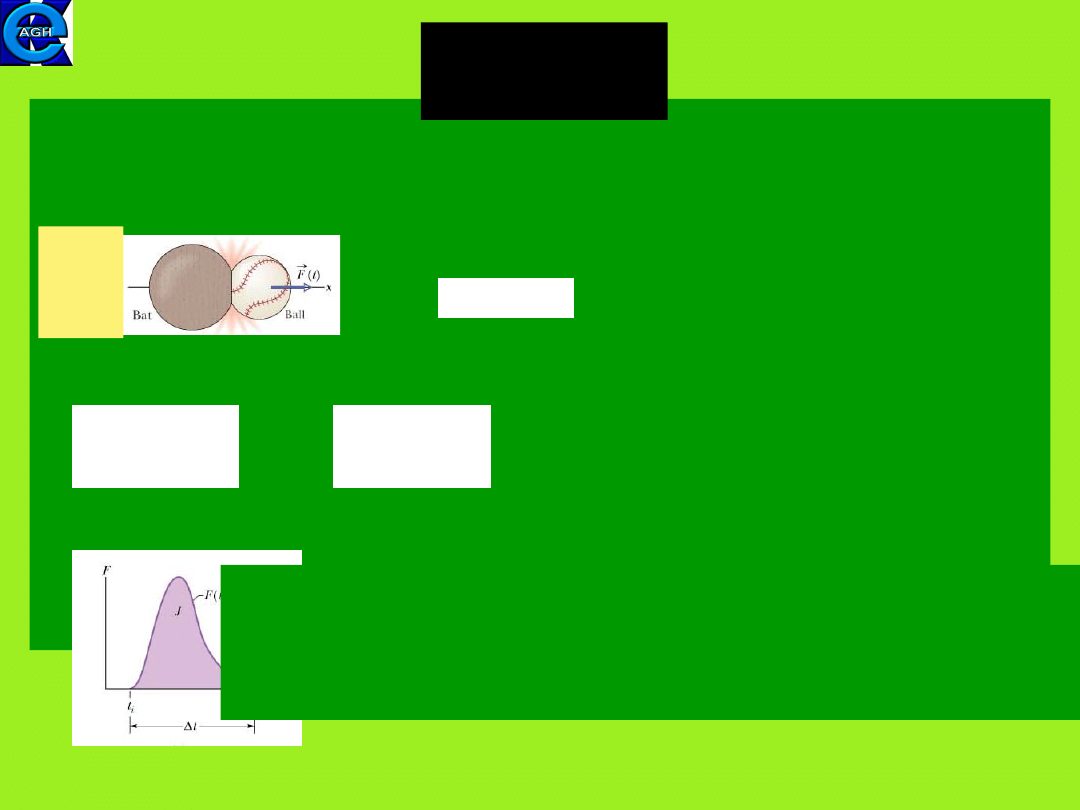
The object’s momentum can be changed by the collision with
other object.
The forces during collision act for a short time and are large. An
example is the
collision of a baseball with a baseball bat.
From the Newton’s second law
(6.13)
The net change in the momentum is obtained after integrating
Eq.(6.13) in time Δt
or
(6.14)
The change in objet’s mometum is equal to the force impuls.
6.4.
Collisions
dt
)
t
(
F
p
d
f
i
f
i
t
t
t
t
dt
)
t
(
F
p
d
f
i
t
t
dt
)
t
(
F
p
(figur
e
from
HRW)
In the figure to the left we see the magnitude of force
varying with time for the collision of a ball with a bat.
The area under the curve is equal to the force impulse in
the collision.
6
In many cases we consider the system isolated in which the
objects mutually
collide. In that case the vector of linear momentum of the system
cannot change.
The total kinetic energy of colliding bodies can be conserved
and in this case
we have an
elastic collision
.
When the kinetic energy of the system is not conserved, a
collision is called
inelastic.
If the colliding bodies stick together, the collision is
called
completely
inelastic.
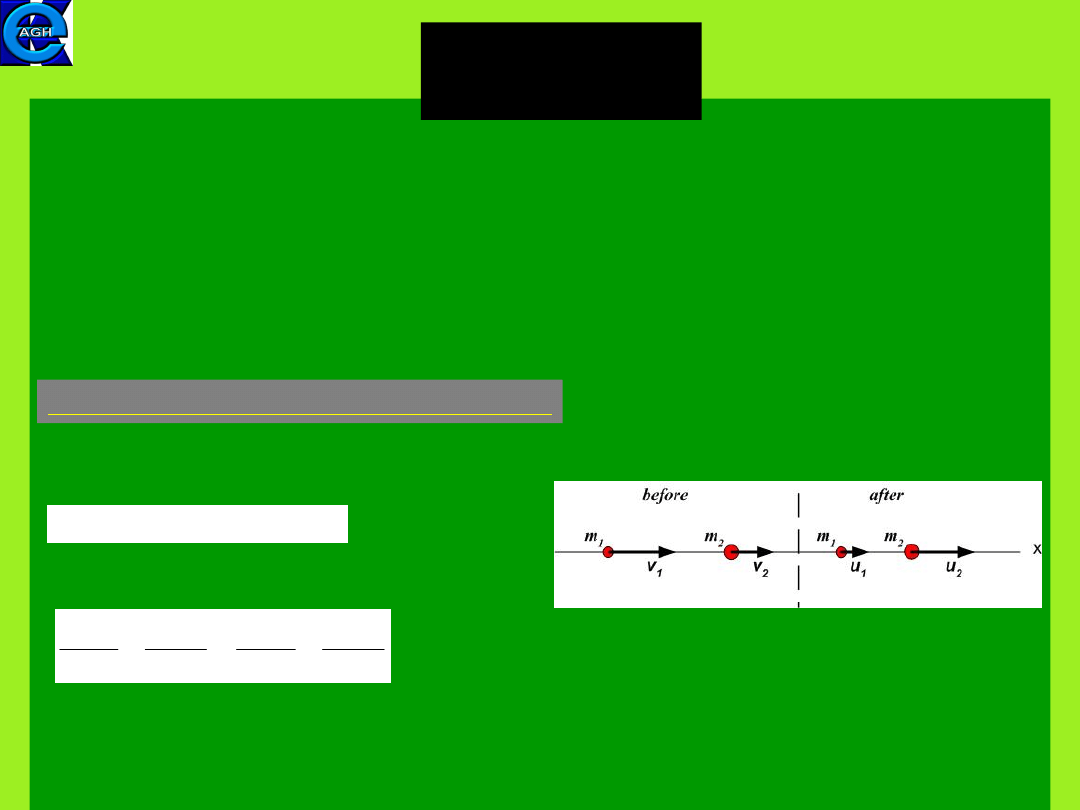
Two bodies collide moving along an x axis. From the
conservation of a linear
momentum
(6.15)
The total kinetic energy is also conserved
(6.16)
Collisions,
cont.
2
2
1
1
2
2
1
1
u
m
u
m
v
m
v
m
2
2
2
2
2
2
2
2
1
1
2
2
2
2
1
1
u
m
u
m
v
m
v
m
Elastic collision in one dimension
7
Solving the simulaneous equations (6.15) and (6.16) for u
1
and
u
2
one obtains
When the particles have the same
masses,
they exchange the velocities after
collision
Collisions,
cont.
2
2
1
2
1
1
2
1
2
2
2
2
1
2
1
2
1
2
1
1
2
2
v
m
m
m
m
v
m
m
m
u
v
m
m
m
v
m
m
m
m
u
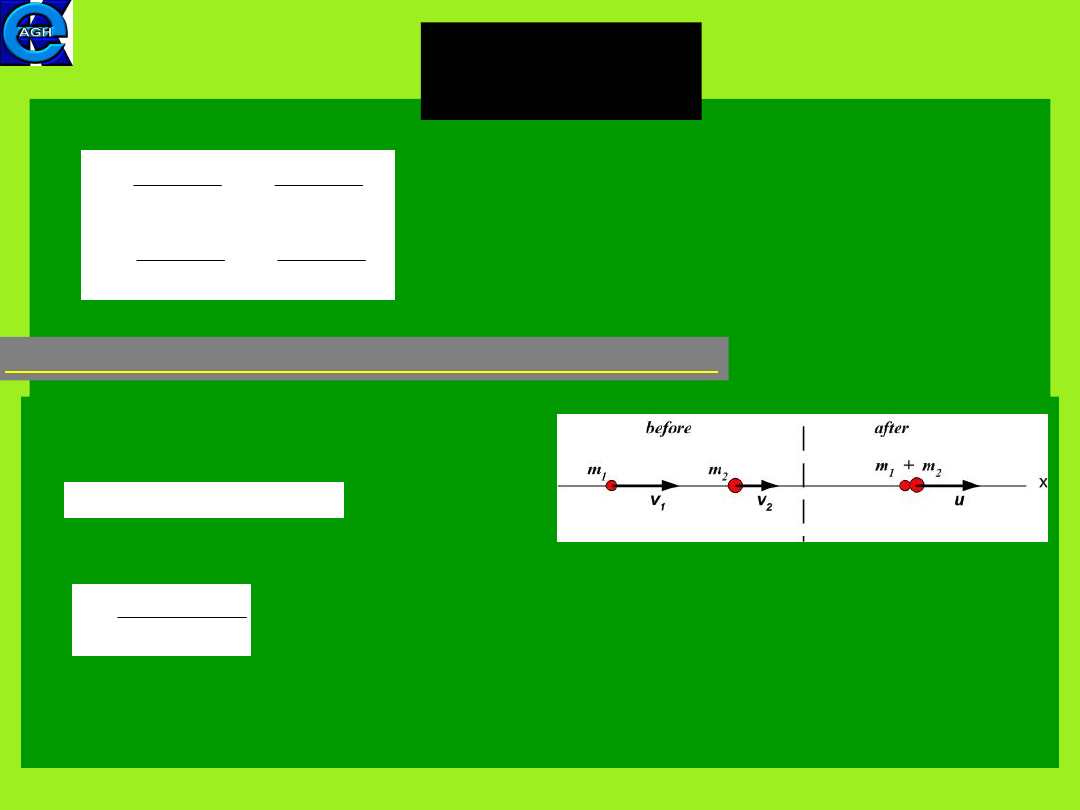
Completely inelastic collision in one dimension
From the conservation of linear momentum
we have
(6.17)
and hence the velocity of sticked together masses is
It is easy to check that the kinetic energy of the body after the
collision is less than the sum of kinetic energies of the bodies
before the collision.
u
)
m
m
(
v
m
v
m
2
1
2
2
1
1
2
1
2
2
1
1
m
m
v
m
v
m
u
Document Outline
Wyszukiwarka
Podobne podstrony:
podrecznik 2 18 03 05
regul praw stan wyjątk 05
05 Badanie diagnostyczneid 5649 ppt
Podstawy zarządzania wykład rozdział 05
05 Odwzorowanie podstawowych obiektów rysunkowych
05 Instrukcje warunkoweid 5533 ppt
05 K5Z7
05 GEOLOGIA jezior iatr morza
05 IG 4id 5703 ppt
05 xml domid 5979 ppt
Świecie 14 05 2005
Wykł 05 Ruch drgający
TD 05
6 Zagrozenia biosfery 07 05 05
05 DFC 4 1 Sequence and Interation of Key QMS Processes Rev 3 1 03
więcej podobnych podstron