3.8 Człon opóźniający
-Ogólna postać równania opisującego człon opóźniający jest następująca: y( t) = K ⋅ (
1 t −τ ) ⋅ x( t −τ ) gdzie:
y(t) – sygnał wyjściowy
x(t) – sygnał wejściowy
τ - czas opóźnienia
K – współczynnik wzmocnienia członu
,stąd jego transmitancja wynosi:
− sτ
G( s) = Ke Charakterystyki czasowe (w tym dziale zostały zamieszczone tylko wykresy charakterystyk, a sposób ich wyznaczenia będzie zamieszczony w 4 rozdziale niniejszego kursu)
-odpowiedź impulsowa [g(t)]
g(t)
y( t) = g( t) = K ⋅δ ( t −τ ) τ
t
_________________________________________________
1 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl
-odpowiedź skokowa [h(t)]
h(t)
K
y t = h t = K ⋅ t −τ
( )
( )
(
1
)
τ
t
_________________________________________________
2 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl
Przykładowe
układy
rzeczywiste
realizujące
funkcję
członu
opóźniającego:
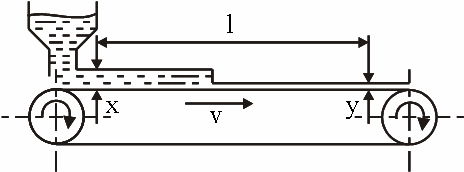
-taśma podajnikowa
y t
( ) = K x t
( −τ )
l
gdzie : K = ,
1 τ
= v
_________________________________________________
3 _
_______________________________________________
Powered by xtoff®
lalik.krzysztof@wp.pl
Wyszukiwarka
Podobne podstrony:
Człon opóźniający
Człon opóźniający
10 człon opóźniający 2
9 człon opóźniający T1
Człon oscylacyjny
Człon inercyjny pierwszego rzędu
Amoksycylina (odczyny opóźnione)
opoznione dojrzewanie plciowe i Nieznany
7b wskazówki praktyczne do skoków z opóźnionym otwarciem spadochronu
Obserwacja objawów opóźnień, kształcenie specjalne
Postępowanie powypadkowe opóźnione
Czynniki przyspieszające i opóźniające proces starzenia się skóry
UKŁADY Z OPÓŹNIENIEM
Diabeł tkwi w szczegółach opóźnij starzenie się szyi
Dzieci z opóźnionym rozwojem mowy, Dokumenty do szkoły, przedszkola; inne, Mowa i percepcja słuchowa
OPÓŹNIENIE ROZWOJU MOWY
Wyjasnienie powodu opoznienia p Nieznany
więcej podobnych podstron