Metody numeryczne – laboratorium 4
1. Aproksymacja, interpolacja
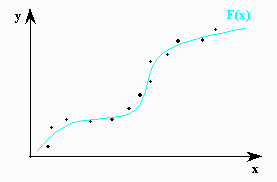
Celem aproksymacji jest znalezienie zależności funkcyjnej F ( x ), w przybliżeniu pokrywającej się z pewną funkcją f ( x ) , określoną w postaci ciągu punktów. Punkty te mogą pochodzić z pomiarów, albo mogą być wynikami innych obliczeń.
Interpolacja – metoda numeryczna polegająca na wyznaczaniu w danym przedziale tzw.
funkcji interpolacyjnej, która przyjmuje w nim z góry zadane wartości w ustalonych punktach, nazywanych węzłami. Stosowana jest ona często w naukach doświadczalnych, gdzie dysponuje się zazwyczaj skończoną liczbą danych do określenia zależności między wielkościami oraz w celu uproszczenia skomplikowanych funkcji, np. podczas całkowania numerycznego. Interpolacja jest szczególnym przypadkiem metod numerycznych typu aproksymacja.
1.1. Wzór interpolacyjny Lagrange'a
Jedną z najpopularniejszych i najprostszych metod interpolacyjnych jest metoda Lagrange'a. Jest to metoda, która zawsze pozwala nam na znalezienie jednoznacznie określonej funkcji interpolującej będącej wielomianem.
Mając dane n+1 węzłów wraz z ich wartościami, szukamy wielomianu Wn(x) stopnia co najwyżej n, który przyjmuje zadane wartości dla zadanych węzłów.
Oznaczając przez
ω( x) = ( x − x )( x − x )K( x − x ) (1)
0
1
n
Wzór interpolacyjny Langrange'a możemy zapisać jako:






































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































n
( x − x )( x − x )L( x − x )( x − x )L( x − x ) W ( x) = ∑ f ( x )
0
1
k −1
k +1
n
n
k
(2)
L
L
=
−
−
−
−
−
k 0
( x
x )( x
x )
( x
x
)( x
x
) ( x
x )
k
0
k
1
k
k −1
k
k +1
k
n
n
ω( x)
W ( x) = ∑ f ( x )
n
k
(3)
=
−
ω
k 0
( x x ) '( x )
k
k
Obie zapisane powyżej postacie wzoru Lagrange'a są równoważne, stosujemy je jednak w różnych przypadkach.
Błąd metody Lagrange'a obliczamy za pomocą wzorów:
R ( )
M
x
n 1
+
≤
ω
( x)
(4)
n
(
+
n + )
n 1
1 !
gdzie
( n 1
+ )
M
= max f
( x)
n 1
+
(5)
x ≤ x≤ x
0
n
Przykład 1.:
Mając dane węzły 0, 1, 3, 8 wraz z wartościami 2, 6, -1, 8 obliczamy wielomian interpolacyjny:
1.2. Iteracyjna metoda Aitkena
Istnieje metoda obliczania wartości wielomianu Lagrange'a w zadanym punkcie, bez obliczania samego wielomianu interpolacyjnego. Służy do tego iteracyjna metoda Aitkena.
Oznaczmy przez Wi,j wielomian który w węzłach xi , xj (i≠j) przyjmuje wartości f(xj), f(xi):






























































































































































































































































































































































y
x − x
i
i
y
x − x
j
j
(6)
Wi, j =
x − x
j
i
W ( x)
x − x
ij
j
W ( x)
x − x
(7)
W ( x)
ik
k
=
ijk
x − x
k
j
Co można uogólnić jako:
W
x − x
,
1 2,..., k − ,
1 k
k
W
x − x
,
1 2,..., − ,
1
(8)
W
( x)
k
m
m
=
,
1 2,..., k , m
x − x
m
k
Aby obliczyć wartość wielomianu interpolacyjnego opartego na n węzłach w dowolnym punkcie a różnym od węzłów, należy obliczyć wartość W1,2,…,n. Wszystkie wyniki niezbędnych obliczeń wygodnie jest umieścić w macierzy trójkątnej wraz z węzłami oraz ich wartościami (schemat taki nazywamy schematem Aitkena). Rozwiązanie takie jest dogodne zarówno podczas rachunków ręcznych, jak i maszynowych, gdyż podczas obliczania każdej wartości zawsze korzystamy z wartości położonych na lewo w tym samym rzędzie i powyższych.
Kolejność obliczania wielomianów w schemacie Aitkena:
x
y
1
1
x
y
W
2
2
,
1 2
x
y
W
W
(9)
3
3
,
1 3
,
1 2,3
K K
K
K
x
y
W
W
W
n
n
,
1 n
,
1 2, n
,
1 2,..., n
Przykład 2.:
Wykorzystując wartości wraz z węzłami z przykładu 1., obliczymy wartość tej funkcji dla argumentu x = 4:
Układamy odpowiednią macierz obliczając kolejno:
,
,
,
,
,



























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Stąd
co jest wartością funkcji Lagrange'a w punkcie
1.3. Wzór interpolacyjny Newtona dla nierównych odstępów argumentu Kolejną metodą wyprowadzania wielomianu interpolacyjnego jest metoda Newtona.
Wielomian utworzony za jej pomocą, jest tożsamy z wielomianem Lagrange'a.
Wprowadźmy pojęcie ilorazu różnicowego. Wyrażenie:
f ( x ; x
;K, x
)− f ( x ; x ;K, x
)
f ( x ; x ;K, x
)
i +1
i+2
i + n
i
i+1
i+ n
=
−1
i
i+1
i+ n
(10)
x
− x
i + n
i
nazywamy ilorazem różnicowym rzędu n.
Podczas dalszych obliczeń, niezbędne staną się wartości kolejnych ilorazów różnicowych: f(x1;x2), f(x1;x2,x3), …, f(x1;x2;…;xn)
Aby je obliczyć, wygodnie jest utworzyć następującą tabelkę:
x
y
0
0
x
y
f ( x ; x )
1
1
1
2
x
y
f ( x ; x )
f ( x ; x ; x )
(11)
2
2
1
3
1
2
3
K K
K
K
x
y
f ( x ; x )
f ( x ; x ; x ) K
f ( x ; x ;K; x )
n
n
1
n
1
2
n
1
2
n
Tak jak poprzednio, przyjmując oznaczenie
ω( x) = ( x − x )( x − x )L( x − x ) (11)
0
1
n
wielomian interpolacyjny który przyjmuje postać:
W ( x) = f ( x ) + f ( x ; x )ω ( x) + f ( x ; x ; x )ω ( x) + K + f ( x ; x ;K; x )ω
( x)
(12)
n
0
0
1
0
0
1
2
1
0
1
n
n 1
−
jest nazywany wzorem interpolacyjnym Newtona z ilorazami różnicowymi. Błąd podczas stosowania powyższej metody jest identyczny jak ten w przypadku interpolacji Lagrange'a.
2. Aproksymacja w Octave (Matlab)
Uzyskiwanie wielomianu aproksymacyjnego:
w1 = polyfit(x0, y0, N)
x0, y0 – współrzędne punktów,
N – zadany stopień wielomianu,
Wynikiem wywołania tej funkcji są współczynniki wielomianu.
Obliczanie wartości wielomianu:
f1 = polyval(w1, x)
w1 – obliczony wielomian,
x – zadany wektor argumentów.
Wynikiem wywołania są wartości wielomianu w1 dla argumentu x.
Przykład 3.:
x0 = [ 0 2 3 4] ;
y0 = [ -1 0 3 8] ;
x=-2:0.1:5
hold on;
plot(x0,y0,'g*');
%aproksymacja wielomianem 2 stopnia
w2=polyfit(x0,y0,2);
f2=polyval(w2,x);
plot(x,f2,'r')
%aproksymacja wielomianem 3 stopnia
w3=polyfit(x0,y0,3);
f3=polyval(w3,x);
plot(x,f3,'b');
hold off;
3. Ćwiczenia
3.1. Utwórz skrypt main.m, w którym zdefiniuj współrzędne punktów: x0 = [1 2 4 6 8 10];
y0 = [6 6 4 2 0 0];
3.2. Narysuj te punkty na wykresie używając np. *
3.3. Wyznacz wbudowanymi funkcjami wielomiany aproksymacyjne 2 i 3 stopnia oraz narysuj na tym samym wykresie ich funkcje wielomianowe.
3.4. Napisz funkcję
function [y] = f_lagrange(x0,y0, x)
która będzie implementacją interpolacji Lagrange’a (wzór 2, 3) gdzie:
x0, y0 – współrzędne punktów,
x – wektor argumentów, dla którego funkcja będzie poszukiwać rozwiązań, y – wektor wartości wielomianu dla x.
3.5. W pliku main.m wywołaj funkcję oraz narysuj ją na tym samym wykresie co poprzednie.
3.6. Napisz funkcję
function [y] = f_aitken(x0,y0, x)
która będzie implementacją iteracyjnej metody Aitkena (wzór 6 - 8) gdzie:
x0, y0 – współrzędne punktów,
x – wektor argumentów, dla którego funkcja będzie poszukiwać rozwiązań, y – wektor wartości wielomianu dla x.
3.7. W pliku main.m wywołaj funkcję oraz narysuj ją na tym samym wykresie co poprzednie odróżniającymi symbolami.
3.8. Napisz funkcję
function [y] = f_newton(x0,y0, x)
która będzie implementacją iteracyjnej metody Newtona dla nierównych odstępów argumentu (wzór 10 – 12)
gdzie:
x0, y0 – współrzędne punktów,
x – wektor argumentów, dla którego funkcja będzie poszukiwać rozwiązań, y – wektor wartości wielomianu dla x.
3.9. W pliku main.m wywołaj funkcję oraz narysuj ją na tym samym wykresie co poprzednie odróżniającymi symbolami.
3.10. Dla zaawansowanych:
Zaproponuj zastosowanie funkcji interp1.
Wyszukiwarka
Podobne podstrony:
Lab4
Lab4
lab4 8
Systemy Operacyjne lab4, Politechnika Wrocławska, Systemy Operacyjne
[4]tabelka, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki, labo
lab4 opr
Lab4
lab4 wejściówka
SI LAB4
SI2 lab4 raport
pkm lab4
lab4 przetwSygnCzest a
i9g1s1 wozniak lab4 sd
L4 - pytania, Studia, Wytrzymałość materiałów II, lab4 wm2 studek
lab4 Kwerendy, bazy danych
[4]opracowanie, Elektrotechnika AGH, Semestr II letni 2012-2013, Fizyka II - Laboratorium, laborki,
Lab4 Grudzinski Krawiec 14XI201 Nieznany
Lab4 OpenSSL v1 9
Lab4 Procesory sygnałowe sprawozdanie PWR, PWr, sprawozdania
więcej podobnych podstron